无轨电车斩波调速系统的设计
GTO斩波调速系统主电路的设计
1 1 0 1 2 2 辽 宁 工贸 学校 辽宁 沈阳 刘 丽杰 【 摘 要】 G T O是一种 自关断型能力的 电力半 导体 器件 ,能用 动机 B 端- + K M 4 - 2 _L —H E— V D 1 一K M 3 一K M 4 — 1 一电动机 A端。 门极信号开通和关断,因而应用于斩波器或逆变器中时,可不用换 流 这样在电动机两端可得到一个脉动的直流 电压 ,其平均值 U M与电源 电 感 、 电容 以及 辅 助 晶 闸管 。 本 文 对 GT O 在 斩 波 调 速 系统 的 主 电路 电压 u的关系为 U M = K U 。因此只要改变斩波器的 占空比 K , 即可改变 进 行 了设 计 , 只要 合 理 设 计 电路 ,G TO 调 速 装 置 必 然能 得 到 广 泛 的 电动机的工作电压 ,从而达到调整的目的。 应用。 当电动机 全压运行 时,可触 发快速晶 闸管导通使 电动机进入弱 【 关键词 】 G T O;牵引运行 ;制动 磁运行 状态。为 了获得恒 加速启动 ,电路可 采用恒流控制 ,即 预先 设 定电流变化 的上 、下 限范围,通过控制 斩波器件的导通 、关断、 G T O是一种 自关断型能力的电力半导体器件,由于这一晶闸管能 达到恒加速启动的 目的。 用门极信号开通 和关断 ,因而应用于斩波器或逆变器 中时 ,可不用换 2 牵 引 一制 动 转换 . 流电感 、电容 以及辅助晶闸管。G T O斩波调速系统能实现直流电动机 首先判断 G T O,电动机续流 ,由于回路 中存在电阻,电枢电流很 牵引、能耗和再生制动 ,可用于城市无轨电车。 快衰减到零。当 H E检测到电枢电流为零时,接触器接点 K M3 、K M4 一 G T O斩 波调 速 系统 主电 路如 图 1 。该 主 电路 由 可关 断 晶 闸管 l 、K M4 . - 2断开 , KM5 闭合 ,为形成制动回路作准备。同时 K M6闭合 , G T O、 续流二极流V D1 、 制动 回路二极管 V D 2 和串励直流电动机 M组成。 预励磁投人工作 ,加快反 电势的产生,以尽快产生较大 的制动力矩。 v T 1 、 R z是能耗制动 回路的晶闸管和电阻器 , H E 是霍尔电流检测器 , 旦反电势建立后 ,K M6自动断开,预励磁装置退 出工作 。 K M 2 是牵引、制动转换接触器 , K M 4 、K M5 是电动机换向接触器。 3 电 气 制 动 电路可实现能耗制动和再生制动,主要根据电源 电压和负载情况 V D1 而定 。例如,当电源无其它负载时 , 再生制动电流将引起滤波电容 c F P 两端 电压上升 ,此时在控制电路的作用下立即转换 为能耗制动,以免 系统在过 电压下工作。当电源电压恢复正常时 ,又立 即自动转换 为再 ! ’ 、 n 2 -一啪 生制动。由于 G T O的全控性和快速性 ,制动模式 的转换 可在一个斩波 周期时间内完成,增强了系统的可靠性 。 珊 ① 能耗制动 。当 G T O导通 时,电流通路 为:电动机 A— K M 4 — I L 』 2 一L —H E —G 1 D— V D 2 一K M 4 — 1 一 电动机 B 端, 此时电流不断下降 。 二 =2 眈 在G T O关断的同时触发 V T 1 导通 ,电流经电阻 R Z与晶闸管 V T l 形成 回路 ,能量消耗在 电阻 R Z上。 ② 再 生 制 动。 在 G T O导 通 时, 电 流 通 路 同 能 耗 制 动, 此 图1 G T O斩波调速系统主电路 时 电 流 上 升,为 储 能 阶段 。在 G T O关 断 时, 电 动 机 A— K M 4 — 1牵引运 行 2 一L —H E —R z —v T l - -  ̄ K M4 - 1 一电动机 B 端。 此时电动机向电源反馈 电动机牵引时, 接触器接点 K M1 、 K M2 、 K M3 、 K M4 — 1 、 L M4 - 2 闭合, 能量 , 实现了再生制动。 连通电动机牵引回路。当 G T O导通时 ,电源向电动机供电 , 其回路为: 制动力矩可任意调节 ,低速时可增加 G T O的导通 时间来保证足够 电流 ( +). +KMI - +K M2一 K M3 K M4 一 l 电动机 M_ +K M 2 _ + 的制 动力 矩 。 参考文献: 电动机励 磁绕组 L— H E— G T O一 电源 ( 一),此时,电动机 电压 等 于 电源电压,极性 A正 B。当 G T O关断时 ,电动机续流 ,其 回路 :电 [ 1 ]张友汉 . 电力电子技术,高等教育 出版社 ,2 0 0 2 . 7
直流电机斩波调速控制系统设计

湖南工程学院课程设计任务书课程名称:电力电子技术题目:直流电机斩波调速控制系统设计专业班级电气工程及其自动化0603学生姓名:刘清学号:200601010314指导老师:蔡斌军审批:任务书下达日期2009 年 6 月8 日设计完成日期2009 年 6 月19 日第一章概述 (1)1.1概述 (1)1.2控制对象 (1)1.3控制要求...................................21.4设计任务...................................2第二章系统工作原理 (3)2.1直流电机的结构与调速原理 (3)2.2调速方案选择 (5)2.3 调速电路方案 (6)2.4 控制方案选择 (7)第三章主电路设计与分析 (8)3.1 主电路原理图及说明 (8)3.2 电路参数计算及选型 (9)第四章控制电路的设计与分析 (11)4.1宽调制PWM电路 (11)4.2电流检测装置 (12)4.3 电流调节器ACR (13)4.4 触发装置 (13)总结 (15)参考文献 (16)附录 (17)第一章.概述 (1)第二章.设计总体思路 (2)2.1主电路设计思路 (2)2.2控制电路设计思路 (3)2.3结构框图 (5)第三章. 各单元思路 (6)3.1 主电路的设计 (6)3.1.1 主电路 (6)3.1.2 电路分析 (6)3.1.3 主电路参数计算和元器件的选择 (6)3.1.4 H型桥式斩波电路的设计 (8)3.1.5 整流电路的设计 (8)3.2 控制电路的设计 (9)3.2.1 控制电路框图 (9)3.2.2 控制电路原理简要 (9)3.2.3 SG3525的结构图和工作原理 (10)3.2.4 各引脚具体功能 (11)3.2.5 SG3525的工作原理 (12)3.2.6 SG3525主要电路及其功能 (13)第四章.保护电路及设计 (14)4.1 主回路输出端过电流保护 (14)4.2 电源欠压报警 (14)4.3 MOSFET的保护设计 (15)4.3.1 MOSFET的过电流保护 (15)4.3.2 MOSFET开关过程中的过电压保护 (16)第五章.总结与体会 (16)附录 (18)参考文献 (19)评分表 (20)第一章.概述电力电子技术在现代化社会的建设中的应用起着重要作用并得到飞跃性的发展。
四象限斩波控制直流调速系统的仿真

四象限斩波控制直流调速系统的仿真四象限斩波控制直流调速系统是一种常见的电机调速控制方法,通过控制电机的电压和电流来实现对电机转速的精确控制。
下面是一个详细的四象限斩波控制直流调速系统的仿真步骤:1. 确定系统参数:首先,需要确定直流电机的参数,包括电机的电感、电阻、转矩常数等。
同时,还需要确定控制系统的参数,包括采样周期、控制器的增益等。
2. 建立数学模型:根据直流电机的特性和控制策略,建立数学模型。
一般来说,可以使用电机的电动方程和电压方程建立数学模型。
3. 设计控制器:根据系统的数学模型,设计合适的控制器。
常见的控制器包括比例控制器、积分控制器和微分控制器等。
根据具体需求,可以选择不同的控制器结构。
4. 进行仿真:使用仿真软件(如MATLAB/Simulink)搭建直流调速系统的仿真模型。
在模型中,将控制器和电机模型进行连接,并设置合适的输入信号。
5. 设置初始条件:为了进行仿真,需要设置合适的初始条件。
这包括电机的初始转速、电流以及控制器的初始状态。
6. 运行仿真:开始仿真运行,并观察系统的响应。
可以通过监测电机的转速、电流以及控制器的输出等参数来评估系统的性能。
7. 优化控制器:根据仿真结果,可以对控制器进行调整和优化。
可以通过改变控制器的参数或者结构来提高系统的性能。
8. 分析结果:根据仿真结果,分析系统的性能。
可以评估系统的稳定性、响应速度和抗干扰能力等指标。
通过以上步骤,可以完成四象限斩波控制直流调速系统的仿真。
在实际应用中,可以根据仿真结果进行实际系统的设计和调试。
IGBT组成的直流斩波调速系统设计

目录1. 课程设计目的 (1)2. 课程设计要求 (1)3. 设计内容 (2)3.1调速系统方案确定 (2)3.2主电路计算 (3)3.2.1整流变压器计算 (3)3.2.2整流元件选择 (4)3.2.3滤波电容选择 (5)3.2.4 IGBT 选择 (5)3.2.5保护元件的选用 (5)3.2.6反馈电路参数选择 (7)3.3控制电路参数选择 (8)3.3.1振荡器T R 、T C 选择 (8)3.3.2 10R 、11R 、0R 电阻的选择 (8)3.3.3放大器的参数选择 (9)3.3.4 12R 及13R 选择 (9)3.3.5继电接触器电路的选择与计算 (9)4. 设计总结 (10)参考文献 (10)附 录 (11)1. 课程设计目的报告正文部分:(要求:正文部分一律用小四号字,宋体,正文全文行间距固定值20pt 。
一级大标题小三号字黑体靠左,加粗。
二级大标题四号黑体靠左。
三级大标题小四黑体。
)2. 课程设计要求技术要求:V U d 110=,A I d 8=,电压连续可调,稳压精度小于%1,有限流保护。
3. 设计内容3.1调速系统方案确定由于可调直流电源容量不大,故可采用单相交流电源供电、单相整流变压器降压、二极管桥式整流、电容滤波获得斩波输入直流电源,经IGBT斩波,即可得到要求的可调直流电源。
IGBT为场控输入器件,输入功率小。
CW494集成脉宽控制器不但可方便获得所要求的250,因此,不用驱动放大电路即可满足斩波频率和脉冲宽度,由于它输出最大电流为mA控制要求,从而简化电路。
CW494内部电路框图如下图所示。
CW494内部有两个放大器,很容易实现电压反馈。
若采用比例积分调节,且反馈电阻、电容参数选择得当,电压静态精度可不用计算,动态精度计算也可从略。
为实现限流保护,可采用电流截止反馈。
因负载功率小,可用电阻采样,还可加入继电器,过电流严重时可切断主电路电源。
系统框图如下图所示。
基于DSP的直流斩波调速系统设计

工作状态又有电阻制动工作状态和再生制动工作状 态之分 。为满足上述数种工作状态对斩波器电路的 要求 ,设计时后级采用电流可逆斩波电路完成电机 的斩波调速 ,其电路如图 4 所示 。
本系统采用复合式光电编码器进行速度检测。 它是一种带有简单磁极定位功能的增量式光电编码 器 ,共有 12 路信号输出 , A 、A 、B 、B 、Z 、Z ,以及 U 、 U 、V 、V 、W 和 W ,各信号波形如图 6 所示 。
在离散时间域内 :
闭合 ,J1 断开 ,电机发出功率 。
输入 rk 、yk
3 速度检测回路
偏差 ek = rk - yk
— 134 —
第 29 卷第 4 期 基于 DSP 的直流斩波调速系统设计 ———郭殿林 ,等 Vol129No14
经调节后的输出 u = xk - 1 + KP ek
关键词 : DSP ; 直流斩波 ; 变换器 中图分类号 : TM46 ; TM714. 3 文献标志码 : A 文章编号 :100320794 (2008) 0420133203
Design of Speed Regulation System of DC Chopping Based on DSP
图 1 系统原理图 3 黑龙江教育厅资助项目 (11511341)
图 2 单相六重斩波电路
矿井电机车在实际运用中 ,有牵引工作状态 、制 动工作状态和停机工作状态之分 。另外 ,电气制动 — 133 —
Vol129No14 基于 DSP 的直流斩波调速系统设计 ———郭殿林 ,等 第 29 卷第 4 期
从图 8 中可以看出 ,在电流和速度双闭环的控 制下 ,电机实际运行速度的超调量很小 ,在稳定运行 过程中 ,转速接近速度给定值 。
斩波式串级调速系统的研究与改进

KEY WORDS : speed regulation system , cascade control , chopping control with IGBT , digital PD control , numerical trigger
华北电力大学硕士学位论文
目录
中文摘要
英文摘要
主要符号表
第一章引言~? ? ? ? ?~·-- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - --一l 1 . 1异步电机调速系统的发展及现状~? ? ? ? ?~·~? ? ? ? ? ? . . l 1 . 2研究的意义和主要工作~? ? ? ? ? ? ? ? ? ? ?~·~? ? ? ? ? ? . . 2第二章绕线式异步电机串级调速理论分析及其改进···················································……4 2 . 1异步电机串级调速理论··············································.. . . . . . . . . . . . . . . . . ..……4 2 . 2串级调速系统的功率因数分析及谐波抑制·······················································……72 . 2 . 1传统串级调速系统的功率因数分析······················································……7 2 . 2 . 2功率因数的改善方法简介········································································……8 2 . 2 . 3串级调速系统的谐波抑制········································································……9 2 . 3几种改进的串级调速方案分析········································································……10 2 . 3 . 1采用三相四线逆变器的串级调速系统···················································……10 2 . 3 . 2普通IGBT斩波式串级调速系统···························································……H 2 . 3 . 3改进的IGBT斩波式串级调速系统·······················································……13 2 . 4小结···················································································································……巧第三章改进的斩波式串级调速系统的参数计算·······················································……16 3 . 1整流模块参数的计算·························································································……16 3 . 2 IGBT模块参数的计算······················································································……17 3 . 3逆变模块的参数计算························································································……19 3 . 4逆变变压器的参数计算····················································································……19 3 . 5平波电抗器的参数计算····················································································……20 3 . 6 RCD网络参数的计算·······················································································……22 3 . 7小结···················································································································……23第四章全数字串级调速系统的实现(硬件部分)·····················································……24 4 . 1系统的组成结构································································································……24 4 . 2功率管的驱动····································································································……25 4 . 2 . 1 IGBT的驱动电路····················································································……25 422晶闸管的驱动电路···~··~··~·~··~······~··~··~…6
斩波调速器工作原理

斩波调速器工作原理斩波调速器是一种用于调节电机速度的装置,它可以通过改变电机的输入电压或频率来实现对电机转速的控制。
斩波调速器的工作原理基于PWM(脉宽调制)技术,通过控制电源的开关时间和开关频率来改变电机的平均电压和电流,从而达到调节电机转速的目的。
斩波调速器主要由电源模块、PWM调制模块、滤波模块和功率输出模块组成。
电源模块负责将交流电源转换为直流电源,为后续模块提供稳定的电源供应。
PWM调制模块是斩波调速器的核心部分,它根据控制信号和电机的实际转速情况,通过调节开关时间和开关频率来控制电机的输入电压和频率。
滤波模块用于平滑PWM输出信号,减少电机的电磁干扰。
功率输出模块将滤波后的PWM信号转换为电机所需的电流和电压,驱动电机运转。
斩波调速器的工作原理可以简单分为三个步骤:采样、比较和控制。
首先,通过采样电机的转速信号,得到电机当前的实际转速。
然后,将实际转速与期望转速进行比较,得到误差信号。
最后,根据误差信号,通过PWM调制模块控制开关时间和开关频率,调节电机的输入电压和频率,使得误差信号逐渐减小,最终使电机的实际转速接近期望转速。
斩波调速器的优点是调速范围广,控制精度高,响应速度快。
它可以实现电机在不同负载下的恒速运转,提高电机的效率和使用寿命。
此外,斩波调速器还具有过载保护和故障自诊断功能,能够保护电机和调速器本身的安全运行。
斩波调速器在工业生产和家用电器中得到了广泛应用。
在工业生产中,它可以用于控制各种机械设备的转速,如风机、水泵、输送带等。
在家用电器中,斩波调速器可以用于调节洗衣机、空调、电风扇等电器的转速,提供更加舒适和节能的使用体验。
然而,斩波调速器也存在一些局限性。
首先,斩波调速器在调速过程中会产生谐波和电磁干扰,对电机和其他电子设备可能会造成影响。
其次,斩波调速器在低速调节时可能会出现震荡现象,影响电机的平稳运行。
此外,斩波调速器的成本相对较高,需要专业的技术支持和维护。
斩波调速器是一种用于调节电机转速的重要装置,它通过控制电机的输入电压和频率,实现对电机转速的精确控制。
电力电子课程设计——regt直流电动机斩波调速系统设计

直流电动机斩波调速系统设计摘要长期以来,直流电机以其良好的线性特性、优异的控制性能等特点成为大多数变速运动控制和闭环位置伺服控制系统的最佳选择。
特别随着计算机在控制领域和高开关频率、全控型第二代电力半导体器件的发展,以及脉宽调制(PWM)直流调速技术的应用,直流电机得到广泛应用。
目前,市场上用的最多的IGBT 直流斩波器,它是属于全控型斩波器,它的主导器件采用国际上先进的电力电子器件IGBT,由门极电压控制,从根本上克服了晶闸管斩波器及GTR 斩波器的缺点。
本次课程设计采用集成脉宽调制器以及调节器构成转速、电流双闭环的直流调速系统,转速环将电动机的的转速转化为电压信号与电压给定相比较,经转速调节器作用产生电流调节器的给定信号。
电枢电流反馈信号与转速调节器的输出信号经电流调节器作用产生控制信号。
因此需要设计电流检测、转速检测电路,以及ACR和ASR的模型。
此外主电路要求设计驱动电路、保护电路和直流斩波电路,降压斩波电路,通过控制可控器件的占空比来控制输出电压的大小。
主电路中的可控性器件通过集成脉宽调制器控制,来控制其开通和关断。
最终形成直流电动机斩波调速系统。
关键词:斩波电路转速调节器电流调节器脉宽调制器保护和检测电路1 概述电力电子技术在现代化社会的建设中的应用起着重要作用并得到飞跃性的发展。
直流斩波器作为一种电力电子器件,也必定随着直流电的广泛应用而显得异常重要。
直流斩波器广泛应用于生产生活等时机情况当中,从我国国情出发,大力发展直流电技术,结合电力电子技术,这对改善我国科技现状水平,提高经济效益将起着重要作用。
因此研究直流斩波器有着深远的意义,它不仅能够大大改善各种机车的调速系统,为其提高安全、快速、低损耗的调速装置,还可以为世界能源危机带来曙光,解决能源带来的各种问题。
鉴于上述情况,本次课设要求设计直流电动机斩波调速系统,加深我们队斩波调速系统的理解。
斩波电路通过控制电路导通比来控制输出端电压大小,用来控制直流电动机时,电枢电压的改变可方便调节电动机转速。
无轨电车IGBT斩波调速

无轨电车IGBT斩波调速
沈惠康
【期刊名称】《人民公交》
【年(卷),期】1999(000)001
【摘要】一、前言晶闸管斩波调速技术在无轨电车上的应用已有30多年了,随着GTO、IGBT等新的电力电子器件的出现,由于其控制与驱动方便,本身的开关速度快,在国外很快就在电力牵引领域得到推广和应用。
在我国,GTO和IGBT都还没有在无轨电车上正式应用,因
【总页数】3页(P12-14)
【作者】沈惠康
【作者单位】上海客车制造公司电车厂
【正文语种】中文
【中图分类】U482
【相关文献】
1.无轨电车IGBT直流斩波调速系统研究 [J], 潘之成
2.无轨电车IGBT斩波调速 [J], 沈惠康
3.MCS—96系列16位单片机在无轨电车斩波调速控制中的应用 [J], 孙永城;应启良
4.用8798单片机控制无轨电车的斩波调速 [J], 应后良;孙永城;沈惠康
5.无轨电车GTO斩波调速装置斩波电路的设计 [J], 杨全兴;罗平水
因版权原因,仅展示原文概要,查看原文内容请购买。
GTO斩波调速系统主电路的设计
GTO斩波调速系统主电路的设计作者:刘丽杰来源:《都市家教·上半月》2014年第02期【摘要】GTO是一种自关断型能力的电力半导体器件,能用门极信号开通和关断,因而应用于斩波器或逆变器中时,可不用换流电感、电容以及辅助晶闸管。
本文对GTO在斩波调速系统的主电路进行了设计,只要合理设计电路,GTO调速装置必然能得到广泛的应用。
【关鍵词】GTO;牵引运行;制动GTO是一种自关断型能力的电力半导体器件,由于这一晶闸管能用门极信号开通和关断,因而应用于斩波器或逆变器中时,可不用换流电感、电容以及辅助晶闸管。
GTO斩波调速系统能实现直流电动机牵引、能耗和再生制动,可用于城市无轨电车。
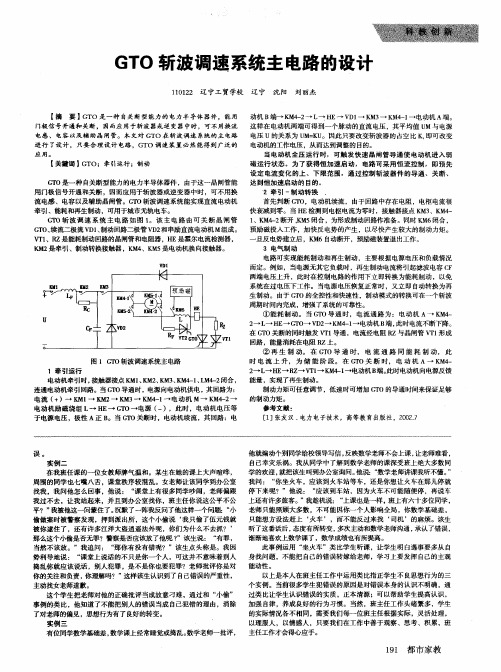
GTO斩波调速系统主电路如图1。
该主电路由可关断晶闸管GTO、续流二极流VD1、制动回路二极管VD2和串励直流电动机M组成。
VT1、RZ是能耗制动回路的晶闸管和电阻器,HE是霍尔电流检测器,KM2是牵引、制动转换接触器,KM4、KM5是电动机换向接触器。
1 牵引运行电动机牵引时,接触器接点KM1、KM2、KM3、KM4-1、LM4-2闭合,连通电动机牵引回路。
当GTO导通时,电源向电动机供电,其回路为:电流(+)→KM1→KM2→KM3→KM4-1→电动机M→KM4-2→电动机励磁绕组L→HE→GTO→电源(-),此时,电动机电压等于电源电压,极性A正B。
当GTO关断时,电动机续流,其回路:电动机B端→KM4-2→L→HE→VD1→KM3→KM4-1→电动机A端。
这样在电动机两端可得到一个脉动的直流电压,其平均值UM与电源电压U的关系为UM=KU。
因此只要改变斩波器的占空比K,即可改变电动机的工作电压,从而达到调整的目的。
当电动机全压运行时,可触发快速晶闸管导通使电动机进入弱磁运行状态。
为了获得恒加速启动,电路可采用恒流控制,即预先设定电流变化的上、下限范围,通过控制斩波器件的导通、关断、达到恒加速启动的目的。
2 牵引-制动转换首先判断GTO,电动机续流,由于回路中存在电阻,电枢电流很快衰减到零。
斩波调速器工作原理

斩波调速器工作原理斩波调速器是一种常见的电力传动装置,主要用于控制旋转机械的转速和输出扭矩。
它通过改变电源的频率来调节电动机的转速,从而实现对机械设备的精确控制。
本文将详细介绍斩波调速器的工作原理。
一、斩波调速器的基本原理斩波调速器的工作原理基于电动机的电磁感应现象和斩波技术。
电动机是由线圈和永磁体组成的,当线圈中通入交变电流时,会在电动机内部产生旋转磁场,从而驱动电动机转动。
而斩波调速器则通过改变电动机输入的电源频率来调整电机的转速。
二、斩波调速器的工作过程斩波调速器的工作过程可以分为三个阶段:输入电源、斩波调制和输出电源。
1. 输入电源:斩波调速器接受外部电源输入,一般为三相交流电。
交流电经过整流电路后转化为直流电,供给斩波调速器内部的逆变器使用。
2. 斩波调制:斩波调速器内部的逆变器将直流电转化为交流电,并通过斩波调制技术来改变交流电的频率。
斩波调制是指在一定的周期内,将交流信号切割成多个小的脉冲信号,通过改变脉冲信号的宽度和间隔来控制输出信号的频率和幅值。
3. 输出电源:斩波调速器输出的交流电经过滤波电路后,供给电动机使用。
电动机接收到斩波调速器输出的交流电后,根据电磁感应现象产生旋转磁场,从而驱动机械设备运转。
三、斩波调速器的优势和应用领域1. 调速范围广:斩波调速器可以实现对电动机转速的精确调节,调速范围广,可满足不同工作场景的需求。
2. 能耗低:斩波调速器通过调整电动机的转速,实现对机械设备的精确控制,避免了不必要的能量浪费,从而提高了系统的能效。
3. 运行稳定:斩波调速器内部采用先进的斩波调制技术,能够稳定输出电源,保证电机运行的稳定性和可靠性。
斩波调速器广泛应用于各个领域,特别是需要对电动机转速进行精确控制的场合。
在工业生产中,斩波调速器被广泛应用于机械加工、输送设备、制造业等领域。
同时,在交通运输、石油化工、电力系统等行业也有着重要的应用。
总结:斩波调速器通过改变电源频率来调节电动机的转速,实现对机械设备的精确控制。
斩波内馈调速

(飞跃,是内馈调速的最佳控制方式和技术完善的标志。
斩波内馈调速(屈氏调速)原理
1、内馈电机原理
内馈电机是在电机内部特殊设置了内馈绕组,目的是接收从转子移出的电转差功率。内馈绕组处于发电状态,抵消了定子绕组的等量输入功率,使得P1=PM+Pi≈PM,从而实现电机高效率的节能运行。如下图,电机调速时,转子的部分功率通过电传导馈入内馈绕组,如果忽略损耗,内馈绕组所获得的功率与转子被移出的功率相等,表现在图中为转子功率圆部分面积与内馈绕组功率圆面积相等。由于转子的部分功率被移出,故转化的机械功率减小,因此电机转速下降;反之则相反。
2、斩波的原理和意义:
斩波实质是调速主电路的数字控制,斩波器相当于按一定的频率,周期性地接通和关断的高速开关。在斩波控制中,控制斩波开关的导通时间(即占空比),就可以实现对逆变电流的控制,于是控制了反馈到内馈绕组的电流和功率,从而实现内馈调速。
斩波控制的意义在于:
(1)内馈绕组只含有功功率和电流,最大容量由移相控制的100%电机功率降低为14.8%,使内馈调速电机工艺简化,成本降低。
基于TL494斩波调速器的设计与实现
课题:基于TL494斩波调速器的设计与实现一:实验目的:基于TL494斩波调速器的设计与实现二:实验要求:用TL494为PWM控制芯片,设计制作一个降压斩波调速器,通过调节占空比调节输出电压,实现电机的单向调速,即电机的单象限运行。
三:系统框图⏹TL494是一种固定频率脉宽调制电路,它包含了开关电源控制所需的全部功能,广泛应用于单端正激双管式、半桥式、全桥式开关电源。
TL494有SO-16和PDIP-16两种封装形式,以适应不同场合的要求。
⏹TL494主要特征集成了全部的脉宽调制电路。
片内置线性锯齿波振荡器,外置振荡元件仅两个(一个电阻和一个电容)。
内置误差放大器。
⏹内止5V参考基准电压源。
可调整死区时间。
内置功率晶体管可提供500mA的驱动能力。
推或拉两种输出方式。
⏹TL494引脚图TL494工作原理简述TL494是一个固定频率的脉冲宽度调制电路,内置了线性锯齿波振荡器,振荡频率可通过外部的一个电阻和一个电容进行调节,其振荡频率如下:输出频率计算(5、6脚)f>1kHz:f<1kHz:输出方式并联单端输出方式:13接地推挽输出方式:13接14(基准电压)T L494内部电路方框图⏹单端输出连接和推挽结构⏹输出连接方式☐8、11接电源,9、10作为输出:☐9、10接地,8、11作为输出:一般采用这种方式,输出既能将波形放大,又能很好地推动输出。
⏹调节占空比(引脚3)☐单端输出(13接地):⏹4接地,调节3脚电压:V3↑→占空比↓⏹3接地,调节4脚电压:V4↑→占空比↓☐推挽输出(13接14):调节4脚电压(0~3.3V):V4↑→(死区↓)占软启动电路驱动功率管驱动晶体管☐可直接驱动PNP型晶体管,如9012、9015⏹驱动场效应管☐TL494的输出是三极管驱动,不能直接驱动场效应管。
☐需要先通过PNP型晶体管再驱动场效应管☐mosfet管在开通时由494的驱动三极管推动,关断时只能靠G极对地的电阻,会造成关断时拖尾,频率高时mosfet管损耗太大。
一种基于斩波技术的无刷直流电机调速电路[发明专利]
![一种基于斩波技术的无刷直流电机调速电路[发明专利]](https://img.taocdn.com/s3/m/57a2f04a0029bd64793e2c5d.png)
专利名称:一种基于斩波技术的无刷直流电机调速电路专利类型:发明专利
发明人:崔臣君,李建冬
申请号:CN201710723830.0
申请日:20170822
公开号:CN107612434A
公开日:
20180119
专利内容由知识产权出版社提供
摘要:本发明涉及一种基于斩波技术的无刷直流电机调速电路,包括:输入滤波器、单相斩波电路、斩波滤波电路、单相整流电路、缓冲与泄放回路、三相逆变桥、DSP控制器、隔离信号调理电路和驱动电路;本发明采用DSP控制器作为主控芯片,无需复杂的软件算法,采用单相斩波电路对无刷直流电机电压进行调制,无需过大的电感,降低电机转矩脉动,启动过程中采用交流斩波和三相逆变桥两级电路进行降压,降低电机启动电流,提高电机启动可靠性,出现异常,可输出保护信号保护控制单路和电机。
申请人:北京机械设备研究所
地址:100854 北京市海淀区永定路50号(北京市142信箱208分箱)
国籍:CN
代理机构:北京天达知识产权代理事务所(普通合伙)
更多信息请下载全文后查看。
IGBT斩波控制的直流电机调速系统设计课程设计

知识掌握程度
15
书写规范性
10
工作量
10
总成绩
100
评语:
任课教师
时 间
年 月 日
备 注
摘 要
在工业生产和机械制造中,直流电机以其良好的线性特性、优异的控制性能等特点成为大多数变速运动控制和闭环位置伺服控制系统的最佳选择。特别随着计算机在控制领域和高开关频率、全控型第二代电力半导体器件的发展,以及脉宽调制(PWM)直流调速技术的应用,直流电机得到广泛应用。直流电动机转速的控制方法可分励磁控制法与电枢电压控制法两类。励磁控制法控制磁通,其控制功率虽然小,但低速时受到磁饱和的限制,高速时受到换向火花和换向器结构强度的限制;而且由于励磁线圈电感较大,动态响应较差。所以常用的控制方法是改变电枢端电压调速的电枢电压控制法,调节电阻R即可改变端电压,达到调速目的。这种传统的调压调速方法效率低。
2.2基本直流斩波电路原理图
系统的基本直流斩波电路原理图如图2.1所示:
图2.1降压斩波电路原理图
此电路使用一个全控型器件V,图中为IGBT,若采用晶闸管,需设置使晶闸管关断的辅助电路。并设置了续流二极管VD,在V关断时给负载中电感电流提供通道。主要用于电子电路的供电电源,也可拖动直流电动机或带蓄电池负载等,后两种情况下负载中均会出现反电动势,如图中Em所示。
关键词:直流电动机;IGBT;直流斩波;调速
前言
随着电力电子技术的高速发展,电子系统的应用领域越来越广泛,电子设备的种类也越来越多。电子设备的小型化和低成本化使电源向轻、薄、小和高效率方向发展。开关电源因其体积小,重量轻和效率高的优点而在各种电子信息设备中得到广泛的应用。直流电动机在冶金、矿山、化工、交通、机械、纺织、航空等领域中已经得到了广泛的应用。直流电动机的启动和调速性能、过载能力强等特点显得十分重要。IGBT降压斩波电路就是直流斩波中最基本的一种电路,是用IGBT作为全控型器件的降压斩波电路,用于直流到直流的降压变换。IGBT是MOSFET与双极晶体管的复合器件。它既有MOSFET易驱动的特点,又具有功率晶体管电压、电流容量大等优点。其频率特性介于MOSFET与功率晶体管之间,可正常工作于几十千赫兹频率范围内,故在较高频率的大、中功率应用中占据了主导地位。所以用IGBT作为全控型器件的降压斩波电路就有了IGBT易驱动,电压、电流容量大的优点。因此,在电力电子技术应用领域中有广阔的发展前景,也由于开关电源向低电压,大电流和高效率发展的趋势,促进了IGBT降压斩波电路的发展。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
负载 电路 输 出 电流 . 反 向放 电 电 流 i 等 于 负载 电 流 L 时 , 丁. 关断 , 对 应 图 3的 t . 时刻. 5 ) T 管 关 断后 , 电容 经 D 、 厶 回路 继 续 放 电 , 反 向放 电电 流 继 续 增 大 , 在 其 增 到最 大 值 之 前, 厶 的 自感 电 动势 给 丁 管 以反 压 . 当 电容 电 流 i 达到最大值 ( f 时刻 ) 之后 , 丁 、 丁: 管 又恢 复 承 受 正 压. 在t ~ t 期 间 , 负载 电流 向 电容 正 向充 电达 + E 值 . 6 )当 电容 充 电 + 值 时 , 电源停 止 输 入 电流 , 负 载 电流 通 过 n 续 流 . 从 上 述 工 作 过 程可 见 , 输 出 电 压 的 脉 宽 是 通 过
厶 一 1( Tj
z
(
9 1 # H
取L 一 9 O H 3 ) 主 晶 闸管 r
反 压 电感 L 。 ≈ L1= 9 0 # H ¨一 V R R M= ( 2~ 3 ) E一 1 2 0 0~ 1 8 0 0 ( V)
取正 、 反 向 峰值 电 压
I T— 1 . 5 L — 1 . 5× 3 0 0; 4 5 0 ( A)
控制 .
系统 通过电源接触器控制和脉冲指令控制 电路 , 实现 电路 的可靠起动 , 且保证 发生 “ 跳弓 等现 象时 , 能 可 靠 地 关 闭斩 波 器 . 3 , 2 触发控制 电路 的设计 触 发 控 制 电路 是 系 统 强 电与 弱 电 的交 接 口 , 是 整 个 调 速 系 统 的 失 键 性 环节 , 其 性 能 的 好
2 斩 波 器 主 电路
2 . 1 主 电路 的 组 成
图2 为 主 电路 原 理 图 . ^ 如 为串励直流电动机 , 主 晶闸 管 丁。 , 辅 助 晶 管 丁 弱 磁 晶 闸管 丁 均 为 型快 速 晶 闸 管 . D 为续流二极管 , c。 , 工 构成 振荡 电 路 , 它 与 D , D。 , 工。 组 成 丁 的 换 流 关
9 O x 1 0 0— 2 9 8  ̄ s
=
其中
To一 、 / Ll CI =
√ = 7 7 . 7 ( ^ ) , 取 K K 一 1 o 0 型 晶 闸 管 .
3 控 制 电路 的设 计 考 虑
3 , 1 控 制 方 案 的 确 定 系统 对 控 制 电路 的要 求
故 选 丁 为 KK 一 5 0 0型 晶闸 管 .
维普资讯
第 7卷 4期
4 ) 辅 助 晶 闸管 z
白秀 珍 :无轨 电车 斩波 调 速 亲统 的 设 计
.1 3.
正、 反 向峰 值 电压 与 丁 相同,
: 一 一 E
√ 每 = 6 o o √ = 5 6 9 . 2 ( ^ ) 有 效 值I : 一 雩√
维普资讯
第 7卷 4期
1 9 9 5年 1 2月
宁
夏 I
学 院
学 报
( 自 然 科
学 版
)
Vo 1 .7 No .4
De c e mb e r ,1 9 9 5
J o u r n a l o f Ni n g x l a I n s t i t u t e o f Te e h n o l o g y( Na t u r a l S e l e n e e )
一
E, 电容 电流 下 降 到 零 . 丁z自行 关 断 . 对应 图 3 如~ f 时间. 电 源在 t 。 时 刻 前 继 续 通 过 丁 管 向 4 ) t 。 时刻后 , 电容 通 过 丁 管 开 始 反 向放 电 , 故 流过 丁. 管 的电流 i . 开 始减小. 当 流 过 丁 的
起 动 的 加速 过 程 , 由 恒 流 给 定 值 决 定 斩 波 器 输 出 电压 的增 长 速 度 , 即 车辆的加速 度. 通 过 电 流
陡度限制器 和 f 调节器 , 可使起动加速平稳 , 防止前i 巾 现象. 电压开 环可 以控制车辆 的运行 速 度. 由司机 脚踏 板主夸控制器( 差动 变压器) 进行调节 , 踏板 的行程正 比于斩 波器的输 出 电压. 控 制系统采用速 度给定 电压开 环与恒流给定 电流 闭环分 别控制 , 二者 的 自动切 换 由低 位优先 逻辑 或 门实现 , 这样 则可保证起动过程中实现电流闭环调 节 , 稳速过 程中实现 电压开环的速度
丁 管 的触发脉 冲 “ . 出现的 时刻 来控制的. 若斩 波
器 工 作 周 期 为 r, 丁 管 的触 发 脉 冲 “ 。 距 丁 管触 发
脉 冲 的 间隔 r 增大 , 则输 出 电压 ( 即电枢 两端 电 压) 的脉宽亦 增大 , 其平 均值越 高 、 电机转 速越快 ; 反之. r 缩短, 则 输 出脉 宽 变 窄 , 电压 平 均 值 越 低 , 电
断 电路 . L 为 平 波 电抗 器 , 日L 为 霍 尔 电流 检 测 器 , 0, L n 为线路滤波器 , D。 为 防止 电 源 反 接 的 反线二极管 , ZL C为线路接触器. 此 外 电路 中还 配 有 进 退 器 , 反线器等.
Dt L|
2 . 2 工 作 原 理 工 作过 程 可 分 如 下 几 步 :
图
斩渡器主 电路原理图
1 )接 通 电源 后 , , 均 未 触发 导通 , 电源 通 过 Ll , D. 及 负载 向 C 充 电到 E, 极性 为上 正
下 负. 对应图 3 t 之前时刻.
2 ) t 时刻 触 发 . 管导通 , 电源 加 到 负载 端 , 流过 负载 电流 L , 由于 D。 的存在 , 电容 无 法
机转速越低 , 车速越慢.
2 . 3 主 要 元 件 参 数 的选 择
根据 负载 电动 机 的功 率 为 6 0 KW , 电压 E 一 6 0 0 V, 本系统采用定频调 宽 ( P 肼 )的 时 间 比控 制 方式 , 工作频 率选 1 2 5 , 导 通 比控 制 范 围 0 . 1~ 0 . 9 , 最 大 不 失 控 电流 L 一 3 0 0 A, 晶 闸 管 最 大 关 断 时间 f 一 8 0 # s , 则主要元件参数选取如下 :
坏, 直 接 影 响到 系 统 工 作 的 可 靠性 .
该部分主要 由振荡器 , 移相器 , 主、 付脉冲形成 器 , 弱磁脉 冲产生器及 脉 冲输 出环节组 成.
完成 上述功能 , 以往通常是采 用半 导体分 立元件实现. 但分立元件有许 多不足之处 , 体积大 , 布 线多 , 分散性大 , 可靠性 差 , 设 计繁琐 , 装调不便. 若采用逻辑 门实现 , 虽 然 比分立 元件设计有所
斩 坡器
’。’ 。 。~
无 轨 电车斩 波调速 系统 设 计 中的应 用.
关键 词 分类 号 调逮 系统 5 5 5定时 器
孔
TM9 2
为 了 减 少 城 市 污 染 ,克 服 环 境 噪 音 ,节 约 能 源 ,应 用 电 车 代 替 汽 车 做 为 交 通 工 具 ,在 一 些 城 市 中 已得 到 越 来 越 广 泛 的 应 用 .本 文 所介 绍 的 “ 无 轨 电车 斩 渡 调 速 系 统 的 设 计 ” ,采 用 大 功 率 快 速 晶 闸 管 控 制 ,与 串 电阻调 速 的 电机 车相 比 ,具 有 体积 小 ,电 能 损耗 低 ,起 动 平 稳 的
动过渡到弱磁运行. 4 ) 车 辆 经 过 线 网 绝缘 发生 “ 跳 弓” 现象时 , 应 能 自动封 锁 脉 i 中, 且 保证 先封 主 脉 i 巾, 后 封 付 脉i 巾, 使 斩 波 器 可 靠 关 闭.
根 据控 制要 求 , 车设计采用 了电流 闭环和 电压开环相结合的控制 方案 . 电流 闭环主要控制
维普资讯
.1 2.
宁 夏 I 学 院 学 报 ~ 岛时 间.
( 自然 科 学 版 )
1 9 9 5年
放 电, 丁 承 受 正 向 电压 E. 对 应 图
3 ) t 。 时 刻 触 发 丁 管导 通 , 电容 经 丁“厶 放 电及 反 充 电 , 使 电容 电压 扳性 由 + E 反 充 至
优点 ,而且 能实 现无级调速和 再生 制动 ,控 制灵 活方便.
1 系 统 的 组 成
本 系统 由斩 波器 主 电路 、 控 制 电路 ( 包 括 自动 控 制 系 统和 触 发 电路 )和 直 流 电源 及 一 些 保 护 环 节 构成 . 系统 组 成 框 图 见 图 1 .
本 系 统 牵 引 电 机 为 城 市 无 轨 电车 专 用 直 流 串 励 牵 引 电 动 机 z 0— 6 o型 , 电 动 机 功 率 6 O Kw , 电压 6 0 0 V, 转速 1 3 4 0 r / ml n . 直 流 线 网 电压 由线 路 接 触 器 接 通 后 , 经 反 线 器 及 线 路 滤 波 器, 再 由斩 波 器 给 出的 直 流 电压 平 均 值 向 电 动机 负载 供 电来 控 制 电机 的 转 速 . 斩 波 器 控 制 电路 由控 制 系 统 和 触 发 控 制 两 部 份 构 成 . 控制 系 统 采 用 了 电流 闭 环 和 电压 开 环 相 结 合的 控 制 方 式 . 电流 闭 环 由恒 流 给 定 环 节 , 陡度 限制器 , 电流 反 馈 环 节 , P,调 节 器 等 组 成. 而 电压 开 环 通 过 司 机 根 据 车 辆 运 行 的 实 际情 况 , 由主 令 控 制 器 ( 司 机脚 踏 板 )给 出 . 两 者 的 切 换 由逻 辑 门控 电路 实 现 . 触 发控 制 电路 主 要 由振荡 器 , 移相器 , 主、 付 脉 冲和 弱 磁 脉 冲形 成 及 输出环节等构成. 其 功 能 主要 是 向 主 电路 各 晶闸 管 发 出相 应 的 触 发 脉 冲 , 使 之 能 协调 一致 地 配 合工 作 , 保 证 斩 波 器 随着 负载 的变 动 及 主令 控 制 器 发 出的 控 制 信 号 进 行 工 作 .