物理5-4
人教版八年级物理第5章-第4节-眼睛和眼镜(提升版)

第五章第4节眼睛与眼镜【课程导入】你知道吗?人眼看物体和凸透镜成像的原理是一样的【新知讲解】※知识点一:眼睛与眼镜人的眼球好像一架照相机。
它的视网膜相当于底片;晶状体和角膜的共同作用相当于一个凸透镜,它把来自物体的光会聚在视网膜上,形成物体的倒立缩小的实像(2)眼睛的成像原理晶状体和角膜的共同作用相当于一个凸透镜,它们把来自物体的光线会聚在视网膜上,形成像,分布在视网膜上的神经细胞受到光的刺激,把这个信号传输给大脑,人就能看见物体了。
(3)眼睛的调节作用当眼睛看近处的物体时,睫状体收缩,带动晶状体变厚,折射作用增强,来自物体的光线会聚在视网膜上形成视觉;当看远处的物体时,睫状体放松,带动晶状体变薄,折射作用减弱,来自远处物体的光线会聚于视网膜上产生视觉。
※例题【例1】人用眼睛观察一个物体,例如观察一棵树,其光学原理就像凸透镜成像一样,如图所示的一支蜡烛通过凸透镜成像在光屏上。
_____树_____就相当于图中的蜡烛,人眼睛的_____晶状体_____就相当于凸透镜,____视网膜______就相当于光屏。
树在视网膜的像是一个_____实_____像。
练习1、正常人的眼睛能将物体的像始终成在视网膜上,从而看清远处或近处的物体,这是由于()A.不断改变物距,使像成在视网膜上B.不断改变晶状体的凸起程度,使像成在视网膜上C.不断改变像距,使像成在视网膜上D.不断改变物体的大小,使像成在视网膜上【答案】B§知识小结※知识点二:近视眼和远视眼及其矫正1、近视眼的成因眼球在前后方向上太长,即视网膜与“凸透镜”的距离过远。
来自远处物体的光线发散程度较低,物体所成的像落在视网膜的前方,视网膜上反而得不到清晰的像,如图所示。
注:近视眼只能看清近处的物体,而看不清远处的物体。
2、近视眼的矫正为了使物体的像仍能会聚在视网膜上,就必须适当抵消近视过度的折光作用,在眼前放一个凹透镜,由于凹透镜对光具有发散作用,这样来自远处物体的像就能恰好会聚在视网膜上,如图所示,所以配戴用凹透镜制成的近视眼镜就能矫正近视。
《走向高考》2013高考物理总复习 5-4能量转化与守恒定律 46张

电场力的功
电势能变化
电场力做负功,电势能增加 W 电=-ΔEp 分子力做正功, 分子势能减少;
分子力的功
分子势能变化 分子力做负功,分子势能增加 W 分子=-ΔEp
必考内容 第五章
第4讲
成才之路 ·物理 ·人教版 · 高考一轮总复习
不同的力做功
对应不同形 式能的变化
定量的关系 作用于系统的一对滑
一对滑动摩 擦力的总功
必考内容 第五章
第4讲
成才之路 ·物理 ·人教版 · 高考一轮总复习
桌面运动,已知 O 点至桌边 B 点的距离为 L=2x,水平桌面 的高为 h=5.0m,计算时,可用滑动摩擦力近似等于最大静 摩擦力(g 取 10m/s2)。求:
必考内容 第五章
第4讲
成才之路 ·物理 ·人教版 · 高考一轮总复习
小物体在达到与传送带相同的速度前经过的位移: v2 12 s1 = = m=0.2m。 2a1 2×2.5
必考内容 第五章
第4讲
成才之路 ·物理 ·人教版 · 高考一轮总复习
因 s1= 0.2m<5m,且 Ff1>mgsin30° ,故此后小物体和传 送带一起做匀速直线运动;对应的位移为 s2 =(5-0.2)m= 1 4.8m,受到的摩擦力为静摩擦力 Ff2=mgsin30° mg。 = 2 传送带全过程对小物体做功: 3 1 W=Ff1s1+Ff2s2= mgs1+ mgs2 =255J。 4 2 1 2 也可以用能的转化和守恒求解 Wf= mv +mglAB· sin30° 2 1 1 2 = ×10×1 J+10×10×5·J=255J。 2 2
弹性势能变 化
能减少; 弹力做负功, 弹性势能增加 WF = - ΔEp = Ep1 - Ep2
2015高三物理一轮:5-4功能关系·能量守恒定律

[限时训练][限时45分钟,满分100分]一、选择题(每小题6分,共60分)1.如图所示,质量为m的跳高运动员先后用背越式和跨越式两种跳高方式跳过某一高度,该高度比他起跳时的重心高出h,则他从起跳后至越过横杆的过程中克服重力所做的功A.都必须大于mghB.都不一定大于mghC.用背越式不一定大于mgh,用跨越式必须大于mghD.用背越式必须大于mgh,用跨越式不一定大于mgh解析用背越式跳高时,其重心升高的高度可小于h,但用跨越式跳高时,其重心升高的高度一定大于h,故C正确,A、B、D均错误.答案 C2.滑板是现在非常流行的一种运动,如图所示,一滑板运动员以7 m/s的初速度从曲面的A点下滑,运动到B点时速度仍为7 m/s,若他以6 m/s的初速度仍由A点下滑,则他运动到B点时的速度A.大于6 m/s B.等于6 m/sC.小于6 m/s D.条件不足,无法计算解析当初速度为7 m/s时,由功能关系知,运动员克服摩擦力做的功等于减少的重力势能.当初速度变为6 m/s时,运动员对轨道的压力变小,由F f=μF N知运动员所受的摩擦力减小,故从A到B过程中克服摩擦力做的功减少,而重力势能变化量不变,故运动员在B点的动能大于他在A点的动能,A正确.答案 A3.如图所示,一轻弹簧的左端固定,右端与一小球相连,小球处于光滑水平面上.现对小球施加一个方向水平向右的恒力F,使小球从静止开始运动,则小球在向右运动的整个过程中A.小球和弹簧组成的系统机械能守恒B.小球和弹簧组成的系统机械能逐渐增大C.小球的动能逐渐增大D.小球的动能先增大然后减小解析小球在向右运动的整个过程中,力F做正功,由功能关系知小球和弹簧组成的系统机械能逐渐增大,选项A错误、B正确;弹力一直增大,当弹力大小等于F时,小球的速度最大,动能最大,当弹力大于F时,小球开始做减速运动,速度减小,动能减小,选项C错误、D正确.答案BD4.如图所示,足够长的传送带以恒定速率顺时针运行,将一个物体轻轻放在传送带底端,第一阶段物体被加速到与传送带具有相同的速度,第二阶段与传送带相对静止,匀速运动到达传送带顶端.下列说法正确的是A.第一阶段摩擦力对物体做正功,第二阶段摩擦力对物体不做功B.第一阶段摩擦力对物体做的功等于第一阶段物体动能的增加C.第一阶段物体和传送带间的摩擦生热等于第一阶段物体机械能的增加D.物体从底端到顶端全过程机械能的增加等于全过程物体与传送带间的摩擦生热解析第一阶段为滑动摩擦力做功,第二阶段为静摩擦力做功,两个阶段摩擦力方向都跟物体运动方向相同,所以摩擦力都做正功,选项A错误;由功能关系可知,第一阶段摩擦力对物体做的功(除重力之外的力所做的功)等于物体机械能的增加,即ΔE=W阻=F阻l物,摩擦生热为Q=F阻l相时,又由于l传送带=v t,l物=v2t,所以l物=l相对=12l传送带,即Q=ΔE,选项C正确、B错误;第二阶段没有摩擦生热,但物体的机械能继续增加,结合选项C可以判断选项D错误.答案 C5.(2014·沈阳二中测试)如图所示,轻质弹簧的一端与固定的竖直板P拴接,另一端与物体A相连,物体A静止于光滑水平桌面上,右端接一细线,细线绕过光滑的定滑轮与物体B相连.开始时用手托住B,让细线恰好伸直,然后由静止释放B,直至B获得最大速度.下列有关该过程的分析正确的是A.B物体的机械能一直减小B.B物体的动能的增加量等于它所受重力与拉力做的功之和C.B物体机械能的减少量等于弹簧的弹性势能的增加量D.细线拉力对A做的功等于A物体与弹簧所组成的系统机械能的增加量解析把A、B和弹簧看做一个系统,机械能守恒,在B下落直至B获得最大速度过程中,A的动能增大,弹簧弹性势能增大,所以B物体的机械能一直减小,选项A正确;由动能定理,B物体的动能的增加量等于它所受重力与拉力做的功之和,选项B正确;B 物体机械能的减少量等于弹簧的弹性势能的增加量与A的动能的增加量之和,选项C错误;对A和弹簧组成的系统,由功能关系,细线拉力对A做的功等于A物体与弹簧所组成的系统机械能的增加量,选项D正确.答案ABD6.(2014·苏州模拟)如图甲所示,在倾角为θ的光滑斜面上,有一个质量为m的物体在沿斜面方向的力F的作用下由静止开始运动,物体的机械能E随位移x的变化关系如图乙所示.其中0~x1过程的图线是曲线,x1~x2过程的图线为平行于x轴的直线,则下列说法中正确的是A .物体在沿斜面向下运动B .在0~x 1过程中,物体的加速度一直减小C .在0~x 2过程中,物体先减速再匀速D .在x 1~x 2过程中,物体的加速度为g sin θ解析 由图乙可知,在0~x 1过程中,物体机械能减少,故力F 在此过程中做负功,因此,物体沿斜面向下运动.因在E -x 图线中的0~x 1阶段,图线的斜率变小,故力F 在此过程中逐渐减小,由mg sin θ-F =ma 可知,物体的加速度逐渐增大,A 正确,B 、C 错误;x 1~x 2过程中,物体机械能保持不变,F =0,故此过程中物体的加速度a =g sin θ,D 正确.答案 AD7.(2014·中山模拟)如图所示,A 、B 两物体用一根跨过定滑轮的细绳相连,置于固定斜面体的两个斜面上的相同高度处,且都处于静止状态,两斜面的倾角分别为α和β,若不计摩擦,剪断细绳后,下列关于两物体说法中正确的是A .两物体着地时所受重力的功率相同B .两物体着地时的动能相同C .两物体着地时的速率相同D .两物体着地时的机械能相同解析 由剪断细绳前两物体平衡可得:m A g sin α=m B g sin β,由机械能守恒得:mgH =12m v 2,可知两物体着地时的速度v =2gH ,故它们的速度大小相同,但因物体质量不同,故两物体着地时的动能和机械能均不同,B 、D 错误,C 正确;由P A =m A g v sin α,P B =m B g v sin β可知,两物体着地时,所受重力的功率相同,A 正确.答案 AC8.如图所示,某段滑雪雪道倾角为30°,总质量为m (包括雪具在内)的滑雪运动员从距底端高为h 处的雪道上由静止开始匀加速下滑,加速度为13g .在他从上向下滑到底端的过程中,下列说法正确的是A .运动员减少的重力势能全部转化为动能B .运动员获得的动能为13mgh C .运动员克服摩擦力做功为23mgh D .下滑过程中系统减少的机械能为13mgh 解析 运动员的加速度为13g ,沿斜面:mg sin 30°-f =m ·13g ,f =16mg ,W f =16mg ·2h =13mgh ,所以A 、C 项错误,D 项正确;E k =mgh -13mgh =23mgh ,B 项错误. 答案 D9.(2014·衡水期末)足够长的粗糙斜面上,用力推着一物体沿斜面向上运动,t =0时撤去推力,0~6 s 内速度随时间的变化情况如图所示,由图象可知A .0~1 s 内重力的平均功率大小与1~6 s 内重力平均功率大小之比为5∶1B .0~1 s 内摩擦力的平均功率大小与1~6 s 内摩擦力平均功率大小之比为1∶1C .0~1 s 内位移大小与1~6 s 内位移大小之比为1∶5D .0~1 s 内机械能变化量大小与1~6 s 内机械能变化量大小之比为1∶5解析 0~1 s 内物体沿斜面向上位移为5 m ,平均速度为5 m/s ;1~6 s 内物体沿斜面向下位移为25 m ,平均速度为5 m/s ;0~1 s 内位移大小与1~6 s 内位移大小之比为1∶5,0~1 s 内重力的平均功率大小与1~6 s 内重力平均功率大小之比为1∶1,选项A 错误、C 正确;0~1 s 内摩擦力大小与1~6 s 内摩擦力大小相等,0~1 s 内摩擦力的平均功率大小与1~6 s 内摩擦力平均功率大小之比为1∶1,选项B 正确;0~1 s 内机械能变化量大小与1~6 s 内机械能变化量大小之比为1∶5,选项D 正确.答案 BCD10.(2014·襄阳调研)如图所示,质量为m 的滑块从斜面底端以平行于斜面的初速度v 0冲上固定斜面,沿斜面上升的最大高度为h .已知斜面倾角为α,斜面与滑块间的动摩擦因数为μ,且μ<tan α最大静摩擦力等于滑动摩擦力,取斜面底端为零势能面,则能表示滑块在斜面上运动的机械能E 、动能E k 、势能E p 与上升高度h 之间关系的图象是解析 势能先随高度增加而变大,后随高度减小而变小,上行与下行图线重合为一条第一象限内过原点的倾斜线段,A 选项错误;机械能变化参考摩擦力做功,上行和下行过程中摩擦力随高度变化均匀做功,机械能随高度变化均匀减小,B 选项错误;动能变化参考合外力做功,上行过程的合外力大于下行过程的合外力,且合外力在运动过程中大小恒定,随高度变化均匀做功,D 选项正确、C 选项错误.答案 D二、计算题(共40分)11.(20分)如图所示,光滑半圆弧轨道半径为R ,OA 为水平半径,BC 为竖直直径.一质量为m 的小物块自A 处以某一竖直向下的初速度滑下,进入与C 点相切的粗糙水平滑道CM 上.在水平滑道上有一轻弹簧,其一端固定在竖直墙上,另一端恰位于滑道的末端C 点(此时弹簧处于自然状态).若物块运动过程中弹簧最大弹性势能为E p ,且物块被弹簧反弹后恰能通过B 点.已知物块与水平滑道间的动摩擦因数为μ,重力加速度为g ,求:(1)物块离开弹簧刚进入半圆轨道时对轨道的压力F N 的大小;(2)弹簧的最大压缩量d ;(3)物块从A 处开始下滑时初速度v 0的大小.解析 (1)由题意可知,物块在B 点满足:mg =m v 2B R,物块由C 点到B 点机械能守恒:12m v 2C =mg ·2R +12m v 2B. 在C 点:F N ′-mg =m v 2C R, 由以上三式联立可得F N ′=6 mg ,由牛顿第三定律可知,物块对轨道最低点C 的压力F N =F N ′=6 mg .(2)由能量守恒定律可得:E p =μmgd +12m v 2C ,解得:d =E p μmg -5R 2μ. (3)对物块由A 点下滑到弹簧达最大压缩量的过程应用能量守恒定律可得:12m v 20+mgR =E p +μmgd解得:v 0= 4E p m-7gR . 答案 (1)6 mg (2)E p μmg -5R 2μ(3) 4E p m -7gR 12.(20分)(2014·四川省名校模拟)长度为L =8 m 的水平传送带以速度v 0=5 m/s 顺时针匀速转动,将质量为m =1 kg 的小物块轻放在距传送带左端O 点2 m 处的P 点,小物块随传送带运动到传送带的右端A 点后,冲上光滑斜面,斜面倾角为30°,到达B 点速度减为零,已知小物块与传送带间的动摩擦因数为0.5,重力加速度g =10 m/s 2,不计小物块经过A 点时的机械能损失.求:(1)B 点距斜面底端的竖直高度h 1;(2)从开始至小物块滑到B 点的时间;(3)若小物块轻放在传送带上的某些位置,小物块均能沿斜面越过C 点,C 点距斜面底端的竖直高度h 2=0.5 m ,求这些位置距O 点的距离范围.解析 (1)设物块在传送带上运动x 距离后与传送带共速,由动能定理得:μmgx =m v 20/2解得:x =2.5 m<(8-2)m故物块滑上斜面前已与传送带共速,由功能关系:μmgx =mgh 1解得:h 1=1.25 m(2)物块在传送带上加速运动时μmg =ma 1,v 0=a 1t 1,解得:t1=1 s此后物块匀速运动L-x-2 m=v0t2,解得:t2=0.7 s沿斜面上滑过程h1sin 30°=v02t3,解得:t3=1 s故物块滑到B点的时间为t=t1+t2+t3=2.7 s(3)设物块通过C点需在传送带上加速x2的距离,则μmgx2>mgh2解得:x2>1 m故小物块释放点距O点的距离d=L-x2<7 m.答案(1)1.25 m(2)2.7 s(3)d<7 m。
高三基础知识天天练 物理5-4人教版

第二模块 第5章 第4单元一、选择题图71.如图7所示,物体A 的质量为m ,置于水平地面上,A 的上端连一轻弹簧,原长为L ,劲度系数为k ,现将弹簧上端B 缓慢地竖直向上提起,使B 点上移距离为L ,此时物体A 也已经离开地面,则下列论述中正确的是( )A .提弹簧的力对系统做功为mgLB .物体A 的重力势能增加mgLC .系统增加的机械能小于mgLD .以上说法都不正确解析:由于将弹簧上端B 缓慢地竖直向上提起,可知提弹簧的力是不断增大的,最后等于A 物体的重力,因此提弹簧的力对系统做功应小于mgL ,A 选项错误.系统增加的机械能等于提弹簧的力对系统做的功,C 选项正确.由于弹簧的伸长,物体升高的高度小于L ,所以B 选项错误.答案:C图82.如图8所示,质量为m 的物体在水平传送带上由静止释放,传送带由电动机带动,始终保持以速度v 匀速运动,物体与传送带间的动摩擦因数为μ,物体过一会儿能保持与传送带相对静止,对于物块从静止释放到相对静止这一过程,下列说法正确的是( )A .电动机做的功为12m v 2B .摩擦力对物体做的功为m v 2C .传送带克服摩擦力做的功为12m v 2D .电动机增加的功率为μmg v解析:由能量守恒,电动机做的功等于物体获得的动能和由于摩擦而产生的热量,故A错;对物体受力分析,知仅有摩擦力对物体做功,由动能定理,知B 错;传送带克服摩擦力做功等于摩擦力与传送带对地位移的乘积,而易知这个位移是木块对地位移的两倍,即W =m v 2,故C 错;由功率公式易知传送带增加的功率为μmg v ,故D 对.答案:D图93.轻质弹簧吊着小球静止在如图9所示的A 位置,现用水平外力F 将小球缓慢拉到B 位置,此时弹簧与竖直方向的夹角为θ,在这一过程中,对于整个系统,下列说法正确的是( )A .系统的弹性势能不变B .系统的弹性势能增加C .系统的机械能不变D .系统的机械能增加解析:根据三力平衡条件可得F =mg tan θ,弹簧弹力大小为F 弹=mgcos θ,B 位置比A 位置弹力大,弹簧伸长量大,所以由A 位置到B 位置的过程中,系统的弹性势能增加,又由于重力势能增加,动能不变,所以系统的机械能增加.答案:BD图104.如图10所示,一小球从光滑圆弧轨道顶端由静止开始下滑,进入光滑水平面又压缩弹簧.在此过程中,小球重力势能和动能的最大值分别为E p 和E k ,弹簧弹性势能的最大值为E p ′,则它们之间的关系为( )A .E p =E k =E p ′B .E p >E k >E p ′C .E p =E k +E p ′D .E p +E k =E p ′解析:当小球处于最高点时,重力势能最大;当小球刚滚到水平面时重力势能全部转化为动能,此时动能最大;当小球压缩弹簧到最短时动能全部转化为弹性势能,弹性势能最大.由机械能守恒定律可知E p =E k =E p ′,故答案选A.答案:A5.节日燃放礼花弹时,要先将礼花弹放入一个竖直的炮筒中,然后点燃礼花弹的发射部分,通过火药剧烈燃烧产生的高压燃气,将礼花弹由炮筒底部射向空中.若礼花弹在由炮筒底部出发至炮筒口的过程中,克服重力做功W1,克服炮筒阻力及空气阻力做功W2,高压燃气对礼花弹做功W3,则礼花弹在炮筒内运动的过程中(设礼花弹发射过程中质量不变)() A.礼花弹的动能变化量为W3+W2+W1B.礼花弹的动能变化量为W3-W2-W1C.礼花弹的机械能变化量为W3-W2D.礼花弹的机械能变化量为W3-W1解析:由动能定理,动能变化量等于合外力做的功,即W3-W2-W1,B正确.除重力之外的力的功对应机械能的变化,即W3-W2,C正确.答案:BC6.飞船返回时高速进入大气层后,受到空气阻力的作用,接近地面时,减速伞打开,在距地面几米处,制动发动机点火制动,飞船迅速减速,安全着陆.下列说法正确的是() A.制动发动机点火制动后,飞船的重力势能减少,动能减小B.制动发动机工作时,由于化学能转化为机械能,飞船的机械能增加C.重力始终对飞船做正功,使飞船的机械能增加D.重力对飞船做正功,阻力对飞船做负功,飞船的机械能不变解析:制动发动机点火制动后,飞船迅速减速下落,动能、重力势能均变小,机械能减小,A正确,B错误;飞船进入大气层后,空气阻力做负功,机械能一定减小,故C、D均错误.答案:A图117.如图11所示,具有一定初速度的物块,沿倾角为30°的粗糙斜面向上运动的过程中,受一个恒定的沿斜面向上的拉力F作用,这时物块的加速度大小为4 m/s2,方向沿斜面向下,那么,在物块向上运动过程中,正确的说法是() A.物块的机械能一定增加B.物块的机械能一定减小C.物块的机械能可能不变D.物块的机械能可能增加也可能减小解析:机械能变化的原因是非重力、弹簧弹力做功,本题亦即看成F与Fμ做功大小问题,由mg sin α+F μ-F =ma ,知F -F μ=mg sin30°-ma >0,即F >F μ,故F 做正功多于克服摩擦力做功,故机械能增大.答案:A8.如图12所示,分别用恒力F 1、F 2先后将质量为m 的物体由静止开始沿同一粗糙的固定斜面由底端拉至顶端,两次所用时间相同,第一次力F 1沿斜面向上,第二次力F 2沿水平方向,则两个过程( )A .合外力做的功相同B .物体机械能变化量相同C .F 1做的功与F 2做的功相同D .F 1做的功比F 2做的功多图12解析:两次物体运动的位移和时间相等,则两次的加速度相等,末速度也应相等,则物体的机械能变化量相等,合力做功也应相等.用F 2拉物体时,摩擦力做功多些,两次重力做功相等,由动能定理知,用F 2拉物体时拉力做功多.答案:AB9.一物体沿固定斜面从静止开始向下运动,经过时间t 0滑至斜面底端.已知在物体运动过程中物体所受的摩擦力恒定.若用F 、v 、x 和E 分别表示该物体所受的合力、物体的速度、位移和机械能,则如下图所示的图象中可能正确的是( )解析:物体在沿斜面向下滑动的过程中,受到重力、支持力、摩擦力的作用,其合力为恒力,A 正确;而物体在此合力作用下做匀加速运动,v =at ,x =12at 2,所以B 、C 错;物体受摩擦力作用,总的机械能将减小,D 正确.答案:AD二、计算题图1310.如图13所示,斜面的倾角为θ,质量为m 的滑块距挡板P 的距离为s 0,滑块以初速度v 0沿斜面上滑,滑块与斜面间的动摩擦因数为μ,滑块所受摩擦力小于重力沿斜面向下的分力.若滑块每次与挡板相碰均无机械能损失,求滑块经过的总路程.解析:滑块最终要停在斜面底部,设滑块经过的总路程为s ,对滑块运动的全程应用功能关系,全程所产生的热量为Q =12m v 20+mgs 0sin θ又全程产生的热量等于克服摩擦力所做的功,即 Q =μmgs cos θ解以上两式可得s =1μ(v 22g cos θ+s 0tan θ).答案:1μ(v 22g cos θ+s 0tan θ)11.如图14甲所示,在倾角为30°的足够长光滑斜面AB 前,有一粗糙水平面OA ,OA 长为4 m .有一质量为m 的滑块,从O 处由静止开始受一水平向右的力F 作用.F 只在水平面上按图乙所示的规律变化.滑块与OA 间的动摩擦因数μ=0.25,g 取10 m/s 2,试求:(1)滑块到A 处的速度大小.(2)不计滑块在A 处的速率变化,滑块冲上斜面的长度是多少?图14解析:(1)由图乙知,在前2 m 内,F 1=2mg ,做正功,在第3 m 内,F 2=0.5mg ,做负功,在第4 m 内,F 3=0,滑动摩擦力F f =μmg =0.25mg ,始终做负功,由动能定理全程列式得:F 1l 1-F 2l 2-F f l =12m v 2A-0即2mg ×2-0.5mg ×1-0.25mg ×4=12m v 2A解得v A =5 2 m/s(2)冲上斜面的过程,由动能定理得-mg ·L ·sin30°=0-12m v 2A所以冲上AB 面的长度L =5 m 答案:(1)5 2 m/s (2)5 m12.电机带动水平传送带以速度v 匀速传动,一质量为m 的小木块由静止轻放在传送带上(传送带足够长),若小木块与传送带之间的动摩擦因数为μ,如图15所示,当小木块与传图15送带相对静止时,求: (1)小木块的位移; (2)传送带转过的路程; (3)小木块获得的动能; (4)摩擦过程产生的摩擦热;(5)电机带动传送带匀速转动输出的总能量. 解析:(1)小木块的加速度a =μg 小木块的位移l 1=v 22a =v 22μg .(2)小木块加速运动的时间t =v a =vμg传送带在这段时间内位移l 2=v t =v 2μg .(3)小木块获得的动能E k =12m v 2.(4)因摩擦而产生的热等于摩擦力(f )乘以相对位移(ΔL ),故Q =f ·ΔL =μmg (l 2-l 1)=12m v 2.(注:Q =E k 是一种巧合,但不是所有的问题都这样).(5)由能的转化与守恒定律得,电机输出的总能量转化为小木块的动能与摩擦热,所以E总=E k +Q =m v 2.答案:(1)v 22μg (2)v 2μg (3)12m v 2 (4)12v 2 (5)m v 2。
物理学(第五版)上册课后习题选择答案

习题11-1 质点作曲线运动,在时刻t 质点的位矢为r ,速度为v ,t 至()t t +∆时间内的位移为r ∆,路程为s ∆,位矢大小的变化量为r ∆(或称r ∆),平均速度为v ,平均速率为v 。
(1)根据上述情况,则必有( B ) (A )r s r ∆=∆=∆(B )r s r ∆≠∆≠∆,当0t ∆→时有dr ds dr =≠ (C )r r s ∆≠∆≠∆,当0t ∆→时有dr dr ds =≠ (D )r s r ∆=∆≠∆,当0t ∆→时有dr dr ds == (2)根据上述情况,则必有( C )(A ),v v v v == (B ),v v v v ≠≠ (C ),v v v v =≠ (D ),v v v v ≠=1-2 一运动质点在某瞬间位于位矢(,)r x y 的端点处,对其速度的大小有四种意见,即(1)dr dt ;(2)dr dt ;(3)dsdt;(4下列判断正确的是:( D )(A )只有(1)(2)正确 (B )只有(2)正确 (C )只有(2)(3)正确 (D )只有(3)(4)正确1-3 质点作曲线运动,r 表示位置矢量,v 表示速度,a 表示加速度,s 表示路程,t a 表示切向加速度。
对下列表达式,即(1)dv dt a =;(2)dr dt v =;(3)ds dt v =;(4)t dv dt a =。
下述判断正确的是( D )(A )只有(1)、(4)是对的 (B )只有(2)、(4)是对的 (C )只有(2)是对的 (D )只有(3)是对的 1-4 一个质点在做圆周运动时,则有( B ) (A )切向加速度一定改变,法向加速度也改变 (B )切向加速度可能不变,法向加速度一定改变 (C )切向加速度可能不变,法向加速度不变(D )切向加速度一定改变,法向加速度不变*1-5 如图所示,湖中有一小船,有人用绳绕过岸上一定高度处的定滑轮拉湖中的船向岸边运动。
长安大学大学物理课5-4角动量 角动量守恒定律

(2)动量矩守恒定律不仅适用于刚体,对非刚体同样适用
如果J不变,刚体作匀速转动;
如果J发生改变,则物体的角速度随转动惯量也发生变化,但二
者的乘积不变。当转动惯量变大时,角速度变小;当转动惯量
变小时,角速度变大。
•花样滑冰运动员的旋转表演
上页
下页
上页
下页
上页
下页
上页
下页
例 工程上,两飞轮常用摩擦离合器使它们以相同的转速一起转动,A和
上页
下页
例 长为 ,质量为 的匀质细杆,一端悬挂,可绕通过 点垂直于 纸面的轴转动。今杆由水平位置静止下落,在铅直位置处与质量为 的 物体 做完全非弹性碰撞,若碰撞后物体沿摩擦系数为 的水平面滑动, 则物体能滑出多远距离。
解:分三个阶段分析。
(1)杆自水平位置落到铅直位置,与A碰前
杆对轴O的转动惯量
•动量矩是物理学的基本概念之一。 •动量矩与质点的运动和参考点有关。
•质点作匀速直线运动,
质点的动量矩 保持不变,
其大小
。
•质点作圆周运动 对圆心O的动量矩
方向:平行于Oz轴
上页
下页
页
Mdt 叫作冲量矩
(质点动量矩定理的微分形式) (质点动量矩定理的积分形式)
5.4 动量矩和动量矩守恒定律
5.4.1 质点动量矩 (角动量)定理和动量矩守恒定律
1. 质点的动量矩(对O点)
定义质点 相对原点的角动量 定义为
大小:L=rmvsin
方向:右手螺旋定则判定
右手拇指伸直,其余四指由 矢径 通过小于 的角弯 向 ,拇指所指方向就是 的方向。
单位:kgm2/s
上页
下页
说明
(2)杆和物体系统为研究对象。碰撞过程中,系统相对于轴O受到 合外力矩为零,角动量守恒,设碰后杆的角速度
2015高考物理一轮复习课件:5-4 功能关系 能量守恒定律
)
B. 静摩擦力起着阻碍物体的相对运动趋势的作用, 一定不做 功 C.静摩擦力和滑动摩擦力一定做负功 D.系统内两物体间相互作用的一对摩擦力做功的总和恒等 于零
解析:功的计算公式 W=Fscosα 中的 s 是指相对于地面的位 移,滑动摩擦力和静摩擦力仅起阻碍物体间的相对运动(或相对运 动趋势)的作用,它与物体对地“绝对位移”的方向既可能相同也 可能相反,说它们一定做负功是错误的.物体间有静摩擦力作用 时两物体相对静止,物体可以对地移动,所以静摩擦力也可能做 功.物体间有相对滑动时,伴随机械能的损耗(转化为内能),所以 一对滑动摩擦力做功的总和恒为负值.
10 保持不变 和转移的过程中,能量的总量□
2.应用能量守恒的两条基本思路 11 增加 ,且 (1)某种形式的能减少,一定存在另一种形式的能□ 12 相等 减少量和增加量□ 13 增加, (2)某个物体的能量减少,一定存在另一个物体的能量□ 14 相等 且减少量和增加量□
考点自测 考点一 功能关系 )
【例 1】 已知货物的质量为 m,在某段时间内起重机将 货物以加速度 a 加速升高 h, 则在这段时间内叙述正确的是(重 力加速度为 g)( )
A.货物的动能一定增加 mah-mgh B.货物的机械能一定增加 mah C.货物的重力势能一定增加 mah D.货物的机械能一定增加 mah+mgh
思路分析
1.(多选题)对于功和能,下列说法正确的是( A.功和能的单位相同,它们的概念也相同 B.做功的过程就是物体能量转化的过程 C.做了多少功,就有多少能量发生了转化
D.各种不同形式的能可以互相转化,且在转化的过程中, 能的总量是守恒的
答案:BCD
2.(多选题)关于摩擦力做功的下列说法中不正确的是( A.滑动摩擦力阻碍物体的相对运动,一定做负功
大学物理练习册习题及答案波动学基础
习题及参考答案第五章 波动学基础参考答案思考题5-1把一根十分长的绳子拉成水平,用手握其一端,维持拉力恒定,使绳端在垂直于绳子的方向上作简谐振动,则(A )振动频率越高,波长越长; (B )振动频率越低,波长越长; (C )振动频率越高,波速越大; (D )振动频率越低,波速越大。
5-2在下面几种说法中,正确的说法是(A )波源不动时,波源的振动周期与波动的周期在数值上是不同的; (B )波源振动的速度与波速相同;(C )在波传播方向上的任二质点振动位相总是比波源的位相滞后; (D )在波传播方向上的任一质点的振动位相总是比波源的位相超前 5-3一平面简谐波沿ox 正方向传播,波动方程为010cos 2242t x y ππ⎡⎤⎛⎫=-+ ⎪⎢⎥⎝⎭⎣⎦. (SI)该波在t =0.5s 时刻的波形图是( )5-4图示为一沿x 轴正向传播的平面简谐波在t =0时刻的波形,若振动以余弦 函数表示,且此题各点振动初相取-π到π之间的值,则()(A )1点的初位相为φ1=0(B )0点的初位相为φ0=-π/2(m)(A )(m)(m)(B )(C )(D )思考题5-3图思考题5-4图(C )2点的初位相为φ2=0 (D )3点的初位相为φ3=05-5一平面简谐波沿x 轴负方向传播。
已知x=b 处质点的振动方程为[]0cos y A t ωφ=+,波速为u ,则振动方程为( )(A)()0cos y A t b x ωφ⎡⎤=+++⎣⎦(B)(){}0cos y A t b x ωφ⎡⎤=-++⎣⎦(C)(){}0cos y A t x b ωφ⎡⎤=+-+⎣⎦ (D)(){}0cos y A t b x u ωφ⎡⎤=+-+⎣⎦ 5-6一平面简谐波,波速u =5m·s -1,t =3s 时刻的波形曲线如图所示,则0x =处的振动方程为( )(A )211210cos 22y t ππ-⎛⎫=⨯- ⎪⎝⎭ (SI) (B )()2210cos y t ππ-=⨯+ (SI) (C )211210cos 22y t ππ-⎛⎫=⨯+ ⎪⎝⎭ (SI) (D )23210cos 2y t ππ-⎛⎫=⨯- ⎪⎝⎭ (SI) 5-7一平面简谐波沿x 轴正方向传播,t =0的波形曲线如图所示,则P 处质点的振动在t =0时刻的旋转矢量图是( )5-8当一平面简谐机械波在弹性媒质中传播时,下述各结论一哪个是正确的? (A )媒质质元的振动动能增大时,其弹性势能减少,总机械能守恒; (B )媒质质元的振动动能和弹性势能都作周期变化,但两者的位相不相同;(C )媒质质元的振动动能和弹性势能的位相在任一时刻都相同,但两者的数值不相等; (D )媒质质元在其平衡位置处弹性势能最大。
5-4内积、外积、混和积

a 2 135 例 设向量 a 的方向角分别为 60 120
求 a的坐标. 解
a1 cos a
a2 cos a a3 cos a
a1 a cos 2cos60 1
a2 a cos
2cos120 1
a3 a cos 2cos135 2
P1 P2
( x2 x1 )2 ( y2 y1 )2 ( z2 z1 )2
证 P P ( x2 x1 , y2 y1 , z2 z1 ) 1 2
P1 P2
( x2 x1 )2 ( y2 y1 )2 ( z2 z1 )2
(3) 两向量夹角的余弦公式
a (1, 1, 2)
例 已知向量 OA {1, 1, 2}和 OB {3, 1, 1} ,求向量 AB 的 方向余弦.
解 因为 AB 2, 2, 1 设其方向角是α,β,γ 又 AB ( 3 1)2 (1 ( 1))2 (1 2)2 3 所以
S 解 F 可以分解成水平方向分力Fx和垂直方向分力Fy , 其中只有与位移平行的分力Fx作功,而Fy不作功. 于是功 W=|F|cosθ |S|=|F| |S| cosθ 为反映这一类物理现象,引入向量的数量积.
1. 数量积的定义
定义 两个向量α与β的数量积是一个数,它等于这两个向量的模
与它们夹角余弦的乘积,记为
0 1 a 1 (a , a , a ) a1 a2 a3 a , , 1 2 3 a a a a a
(cos , cos , cos )
0 a 为与 a同方向的单位向量
空间的每一个向量都可以由它的模与方向余弦(或方向角)决定,特 别地,单位向量的方向余弦等于它的坐标.
微专题( 透镜)5-4 实像与虚像的区分—(疑难解读+解题技巧)九年级物理中考复习专题讲义

实像与虚像的区分知识·解读物理中实像和虚像的区别有:1、成像原理:物体射出的光线经光学元件反射或折射后,重新会聚所成的像叫做实像,它是实际光线的交点。
在凸透镜成像中,所成实像都是倒立的。
如果物体发出的光经光学元件反射或折射后发散,则它们反向延长后相交所成的像叫做虚像。
2、承接方式:虚像能用眼睛直接观看,但不能用光屏接受;实像既可以用光屏承接,也可以用眼睛直接观看。
人看虚像时,仍有光线进入人眼,但光线并不是来自虚像,而是被光学元件反射或折射的光线,只是人们有“光沿直线传播”的经验,以为它们是从虚像发出的。
虚像可能因反射形成,也可能因折射形成,如平面镜成等大的虚像,凸透镜成放大的虚像。
3、成像位置:实像在反射成像中,物、像处于镜面同侧,在折射成像中,物像处于透镜异侧;虚像在反射成像中,物、像处于镜面异侧,在折射成像中,物像处于透镜同侧。
总结:小孔成像、照相机、投影仪成实像。
平面镜、凹面镜、凸面镜、凹透镜、放大镜成虚像。
海市蜃楼、筷子在水中“折断”等光的折射引起的也成虚像。
当然,它们的原理不尽相同,小孔成像是光的直线传播;平面镜、凹面镜、凸面镜是光的反射;照相机、投影机、放大镜、凹透镜、海市蜃楼等是光的折射。
实像总是倒立的,虚像总是正立的。
典例·解读例1、在初中物理的学习中,我们经常提到的像:①小孔成像、②平面镜成像、③放大镜成像、④电影银幕上的像、⑤汽车观后镜中的像。
其中()A、属于实像的是①②③B、属于虚像的是②③④C、由于反射而成的像是②⑤D、由于折射而成的像是①③④【答案】C【解析】:各种像的成因及性质:小孔成像——光沿直线传播——倒立、实像;平面镜成像——光的反射——正立、等大、虚像;放大镜成像——光的折射——正立、放大、虚像;电影银幕上的像——光的折射——倒立、放大、实像;汽车观后镜中的像——光的反射——正立、缩小、虚像。
例2、下列关于实像与虚像的说法中,正确的是()A、虚像是没有实际光线进入人眼,实像是有实际光线进入人眼B、虚像就是影子,实像是由实际光线形成的亮斑C、实像能在光屏上呈现,虚像不能在光屏上呈现D、光线经折射后总是成实像,经平面镜反射后总成虚像【答案】C【解析】实像和虚像的区别:不同点:(1)成因不同,实像是由实际光线会聚而成的,而虚像是由实际光线的反向延长线会聚而成的;(2)像的正倒不一样,实像一般是倒立的,而虚像是正立的;(3)呈现效果不同,实像可以用光屏接收,而虚像不能用光屏接收.共同点:实像和虚像都能用眼睛看得到.例3、6月20日,我国宇航员王亚平在“天宫一号”完成了太空授课,如图是她做水球透镜实验时的情景,通过水球可以看到她的像,以下有关像的判断及成像规律的应用,说法正确的是( )A.实像凸面镜B.虚像放大镜C.实像照相机D.实像投影仪【答案】C【解析】本题考查凸透镜成像的应用。
《物理光学》§5-4-7-8矩孔和单缝的 夫琅和费衍射

r - cos n , 2
l d
cos n , 1 ~ Aexp ikl c , E , K i l
r - cos n , 2
l
正是表示孔径内各点发出的子波在方向余弦
和w代表的方向上的叠加,叠加的结果取决于 各点发出的子波和参考点C点发出的子波的位 相差。由于透镜的作用,和w代表的方向上的 子波聚焦在透镜焦面上的P点。
§5-4矩孔和单缝的夫琅和费衍射
3.另一个重要意义: x c x 2 y 2 ~ y ~ E x1 , y1 exp ik x1 y1 dx1dy1 E x, y exp ik f f f 2 f f 令
b b a a x : ~ , y1: ~ 取矩孔中心作为坐标原点:1 2 2 2 2
则
观察屏上的P点的复振幅为
~ E x1 , y1 exp ik lx1 wy1 1 dy1 dx a b
2 2 a 2 b 2
x2 y2 c ~ E exp ikf exp ik f 2f
:
ik exp ikz1 ~ ~ 2 2 E x, y E x1 , y1 exp 2z1 x x1 y y1 dx1dy1 iz1
§5-4矩孔和单缝的夫琅和费衍射
x 2 y 2 xx1 yy1 4、夫琅和费近似: r z1 2 z1 z1
§5-4矩孔和单缝的 夫琅和费衍射
§5-4矩孔和单缝的夫琅和费衍射
大学物理第5章习题解答

第五章 机械振动5-1一远洋货轮,质量为t M 4102⨯=,浮在水面对其水平截面积为23102m S ⨯=。
设在水面附近货轮的截面积与货轮高度无关,试证明此货轮在水中的铅直自由运动是简谐振动,并求其自由振动的周期。
解:取固定坐标xOy ,坐标原点O 在水面上(图题所示)设货轮静止不动时,货轮上的A 点恰在水面上,则浮力为S ρga .这时 ga s Mg ρ= 往下沉一点时,合力 )(y a g s Mg F +-=ρ gy s ρ-=. 又 22d d t yMMa F == 故0d d 22=+gy s t y M ρ022=+y M gs dt dy ρ 故作简谐振动 M gs ρω=2)(35.68.910102101022223334s g s M T =⨯⨯⨯⨯⨯===πρπωπ5-2 重物A 的质量M=1kg ,放在倾角030=θ的光滑斜面上,并用绳跨过定滑轮与劲度系数149-⋅=m N k 的轻弹簧连接,如习题5-2图所示,将物体由弹簧未形变的位置静止释放,并开始计时,试求:(1)不计滑轮质量,物体A 的运动方程;(2)滑轮为质量M ,半轻r 的均质圆盘,物体A 的运动方程。
解:取物体A 为研究对象,建立坐标Ox 轴沿斜面向下,原点取在平衡位置处,即在初始位置斜下方距离l 0处,此时:)(1.0sin 0m kmg l ==θ(1) 习题5-1图(1) A 物体共受三力;重mg, 支持力N, 张力T.不计滑轮质量时,有 T =kx列出A 在任一位置x 处的牛顿方程式220d d )(sin sin txm x l k mg T mg =+-=-θθ将(1)式代入上式,整理后得0d d 22=+x mkt x 故物体A 的运动是简谐振动,且)rad/s (7==mkω 由初始条件,000⎩⎨⎧=-=v l x 求得,1.00⎩⎨⎧===πϕml A 故物体A 的运动方程为x =(7t+π)m(2) 当考虑滑轮质量时,两段绳子中张力数值不等,如图所示,分别为T 1、T 2,则对A 列出任一位置x 处的牛顿方程式为:221d d sin txm T mg =-θ (2)对滑轮列出转动方程为:22221d d 2121t x Mr r a Mr J r T r T =⎪⎭⎫ ⎝⎛==-β (3)式中,T 2=k (l 0+x ) (4)由式(3)、(4)知2201d d 21)(t xM x l k T ++=代入(2)式知22021)(sin dtxd m M x l k mg ⎪⎭⎫ ⎝⎛+=+-θ又由(1)式知0sin kl mg =θ故0d d )21(22=++kx txm M即0)2(d d 22=++x m M ktx 习题5-2图m M k +=22ω可见,物体A 仍作简谐振动,此时圆频率为:rad/s)(7.52=+=m M k ω由于初始条件:0,000=-=v l x可知,A 、ϕ不变,故物体A 的运动方程为:m t x )7.5cos(1.0π+=由以上可知:弹簧在斜面上的运动,仍为简谐振动,但平衡位置发生了变化,滑轮的质量改变了系统的振动频率.5-3质点作简谐振动的振动曲线如习题5-3图所示,试根据图得出该质点的振动表达式。
《物理学基本教程》课后答案_第四章__刚体的转动
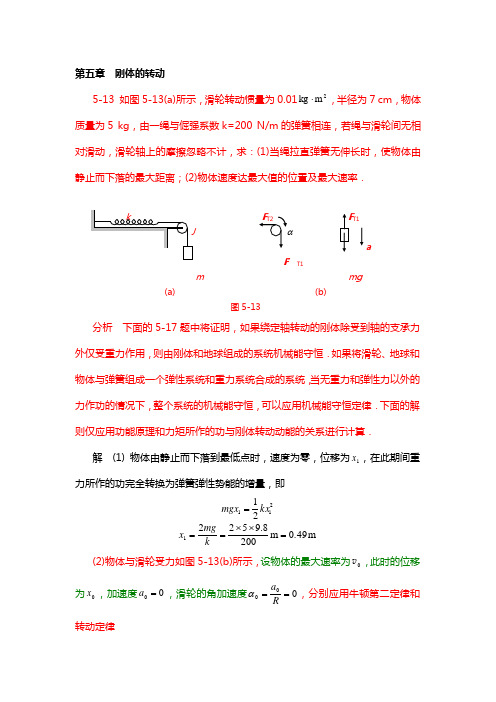
第五章 刚体的转动5-13 如图5-13(a)所示,滑轮转动惯量为0.012m kg ⋅,半径为7 cm ,物体质量为5 kg ,由一绳与倔强系数k=200 N/m 的弹簧相连,若绳与滑轮间无相对滑动,滑轮轴上的摩擦忽略不计,求:(1)当绳拉直弹簧无伸长时,使物体由静止而下落的最大距离;(2)物体速度达最大值的位置及最大速率.分析 下面的5-17题中将证明,如果绕定轴转动的刚体除受到轴的支承力外仅受重力作用,则由刚体和地球组成的系统机械能守恒.如果将滑轮、地球和物体与弹簧组成一个弹性系统和重力系统合成的系统,当无重力和弹性力以外的力作功的情况下,整个系统的机械能守恒,可以应用机械能守恒定律.下面的解则仅应用功能原理和力矩所作的功与刚体转动动能的关系进行计算.解 (1) 物体由静止而下落到最低点时,速度为零,位移为1x ,在此期间重力所作的功完全转换为弹簧弹性势能的增量,即21121kx mgx = m 0.49m 2008.95221=⨯⨯==k mg x (2)物体与滑轮受力如图5-13(b)所示,设物体的最大速率为0v ,此时的位移为0x ,加速度00=a ,滑轮的角加速度000==R a α,分别应用牛顿第二定律和转动定律T1aF ’T1m m g(a) (b)图5-13ma F mg =-T1αJ R F F =-)(T2T1可得此时T1F mg =,F T1= F T2,又因对于轻弹簧有0T2kx F =,则得m 0.245m 2008.950=⨯==k mg x 在此过程中,重力所作之功等于弹性势能的增量、物体动能和滑轮转动动能的增量的和,即2020200212121ωJ m kx mgx ++=v 因R 00v =ω,得 m/s 31.1m/s 9.85)07.001.05(2001)(122=⨯⨯+⨯=+=mg R J m k v5-7 如图5-7(a )所示的系统中,m 1 = 50 kg ,m 2 = 40 kg ,圆盘形滑轮质量m = 16 kg ,半径R = 0.1 m ,若斜面是光滑的,倾角为30°,绳与滑轮间无相对滑动,不计滑轮轴上的摩擦,(1)求绳中张力;(2)运动开始时,m 1距地面高度为1 m ,需多少时间m 1到达地面?分析 由于存在物体运动和滑轮定轴转动,而且必须考虑圆盘形滑轮的质量,这是一个质点动力学和刚体动力学的综合问题,应该采用隔离物体法,分别m αF ’T1 F T1 m 2 m 1 F F T2a︒30m 2g m 1g(a ) (b )图5-7对运动物体作受力分析,对转动的滑轮作所受力矩的分析,然后分别应用牛顿第二定律和转动定律.解 (1)各物体与滑轮受力情况如图5-7(b )所示,其中F T1= F ’T1,F T2= F ’T2,轴对滑轮的支承力F N 不产生力矩,选取物体运动方向为坐标轴正向,分别应用牛顿第二定律和转动定律,可得22121rad/s 3021)(30sin =++︒-=g mR R m m m m α N 340)(1T1=-=αR g m FN 316)30sin (2T2=+︒=αR g m F2m/s 3==αR a(2) m 1到达地面的时间为s 0.816s 3122=⨯==a h t 、5-1 一个匀质圆盘由静止开始以恒定角加速度绕过中心而垂直于盘面的定轴转动.在某一时刻,转速为10 r/s ,再转60转后,转速变为15 r/s ,试计算:(1)角加速度;(2)由静止达到10 r/s 所需时间;(3)由静止到10 r/s 时圆盘所转的圈数.分析 绕定轴转动的刚体中所有质点都绕轴线作圆周运动,并具有相同的角位移、角速度和角加速度,因此描述运动状态的物理量与作圆周运动的质点的相似.当角加速度恒定时,绕定轴转动的刚体用角量表示的运动学公式与匀加速直线运动的公式类似.解 (1) 根据题意,转速由rad/s 1021⨯=πω变为rad/s 1522⨯=πω期间的角位移rad 260πθ⨯=,则角加速度为22222122rad/s 54.6rad/s 2602)102()152(2=⨯⨯⨯-⨯=-=πππθωωα (2) 从静止到转速为rad/s 1021⨯=πω所需时间为s 9.61s 54.61021=⨯==παωt (3) t 时间内转的圈数为48261.91022122121=⨯⨯⨯===ππωππθt N 5-2 唱片在转盘上匀速转动,转速为78 r/min ,由开始到结束唱针距转轴分别为15 cm 和7.5 cm ,(1)求这两处的线速度和法向加速度;(2)在电动机断电以后,转盘在15 s 内停止转动,求它的角加速度及转过的圈数.分析 绕定轴转动的刚体中所有质点具有相同的角位移、角速度和角加速度,但是线速度、切向加速度和法向加速度等线量则与各质点到转轴的距离有关.角量与线量的关系与质点圆周运动的相似.解 (1) 转盘角速度为rad/s 8.17rad/s 60278=⨯=πω,唱片上m 15.01=r 和m 075.02=r 处的线速度和法向加速度分别为m /s 1.23m /s 15.017.811=⨯==r ωv222121n m /s 10.0m /s 15.017.8=⨯==r ωam /s .6130m /s 075.017.822=⨯==r ωv222222n m /s .015m /s 075.017.8=⨯==r ωa(2) 电动机断电后,角加速度为22rad/s 545.0rad/s 1517.800-=-=-=t ωα 转的圈数为 75.921517.8212212=⨯⨯===πωππθt N 5-3 如图5-3所示,半径r 1 = 30 cm 的A 轮通过皮带被半径为r 2 = 75 cm 的B 轮带动,B 轮以π rad/s 的匀角加速度由静止起动,轮与皮带间无滑动发生,试求A 轮达到3000 r/min 所需要的时间. 分析 轮与皮带间无滑动,则同一时刻,两轮边缘的线速度相同,均等于皮带的传送速度;两轮边缘的切向加速度也相同,均等于皮带的加速度.解 设A 、B 轮的角加速度分别为A α、B α,由于两轮边缘与皮带连动,切向加速度相同,即2B 1A r r αα=则 B 12A ααr r = A 轮角速度达到rad/s 6030002⨯=πω所需要的时间为 s 40s 75.06030.0300022B 1A =⨯⨯⨯⨯===ππαωαωr r tB A r 1 r 2图5-35-4 在边长为b 的正方形的顶点上,分别有质量为m 的四个质点,求此系统绕下列转轴的转动惯量:(1)通过其中一质点A ,平行于对角线BD 的转轴,如图5-4所示.(2)通过A 垂直于质点所在平面的转轴.分析 由若干质点组成的质点系对某转轴的转动惯量等于各质点对该转轴转动惯量的叠加.每一质点对转轴的转动惯量等于它的质量与其到转轴的垂直距离平方的乘积. 解 (1)因质点B 和D 到转轴的垂直距离A 2B 和A 1D 为a 22,质点C 到转轴的垂直距离AC 为a 2,而质点A 位于转轴上,则系统对通过A 点平行于BD 的转轴的转动惯量为()222132222ma am a m J =+⎪⎪⎭⎫ ⎝⎛=(2) 因质点B 和D 到转轴的垂直距离AB 和AD 为a ,质点C 到转轴的垂直距离AC 为a 2,而质点A 位于转轴上,则系统对通过A 垂于质点所在平面转轴的转动惯量为()2222422ma a m ma J =+=5-5 求半径为R ,质量为m 的均匀半圆环相对于图5-5中所示轴线的转动惯量.分析 如果刚体的质量连续分布在一细线上,可用质量线密度描述其分布情况,如果分布是均匀的,则质量线密度λ为常量.在刚体上取一小段线元l d ,质量为l d λ,对转轴的转动惯量为l r d 2λ,其中该线元AA 2B图5-4 R图5-5到转轴的距离r 与线元在刚体上的位置有关.整个刚体的转动惯量就是刚体上所有线元转动惯量的总和,即所取线元的转动惯量对刚体分布的整个区域积分的结果.解 均匀半圆环的质量线密度为Rm πλ=,在半圆环上取一小段圆弧作为线元θd d R l =,质量为θπθπλd d d d m R R m l m === 此线元到转轴的距离为θsin R r =,对轴线的转动惯量为m r d 2,则整个半圆环的转动惯量为2022221d sin d mR m R m r J =⋅==⎰⎰θπθπ 5-6 一轻绳跨过滑轮悬有质量不等的二物体A 、B ,如图5-6(a)所示,滑轮半径为20 cm ,转动惯量等于2m kg 50⋅,滑轮与轴间的摩擦力矩为m N 198⋅.,绳与滑轮间无相对滑动,若滑轮的角加速度为2rad/s 362.,求滑轮两边绳中张力之差. 分析 由于定轴转动的刚体的运动规律遵从转动定律,因此对于一个定轴转动的滑轮来说,仅当其质量可以忽略,转动惯量为零,滑轮加速转动时跨越滑轮的轻绳两边的张力才相等.这就是在质点动力学问题中通常采用的简化假设.在掌握了转动定律后,不应该再忽略滑轮质量,通常将滑轮考虑为质量均匀分布的圆盘,则跨越滑轮的轻绳两边的张力对转轴的合力矩是滑轮产生角加速度的原因.解 滑轮所受力和力矩如图5-6(b)所示,其中跨越滑轮的轻绳两边的张力分别为F T1和F T2,轴的支承力F N 不产生力矩,由转动定律可得fF T1 F T2(a) (b)图5-6αJ M R F F =--f T2T1)()(1f T2T1M J R F F +=-α N 101.08N )1.9836.250(2.01 3⨯=+⨯⨯= 5-7 如图5-7(a )所示的系统中,m 1 = 50 kg ,m 2 = 40 kg ,圆盘形滑轮质量m = 16 kg ,半径R = 0.1 m ,若斜面是光滑的,倾角为30°,绳与滑轮间无相对滑动,不计滑轮轴上的摩擦,(1)求绳中张力;(2)运动开始时,m 1距地面高度为1 m ,需多少时间m 1到达地面?分析 由于存在物体运动和滑轮定轴转动,而且必须考虑圆盘形滑轮的质量,这是一个质点动力学和刚体动力学的综合问题,应该采用隔离物体法,分别对运动物体作受力分析,对转动的滑轮作所受力矩的分析,然后分别应用牛顿第二定律和转动定律.解 (1)各物体与滑轮受力情况如图5-7(b )所示,其中F T1= F ’T1,F T2= F ’T2,轴对滑轮的支承力F N 不产生力矩,选取物体运动方向为坐标轴正向,分别应用牛顿第二定律和转动定律,可得m αF ’T1 F T1 m 2 m 1 F F T2a︒30m 2g m 1g(a ) (b )图5-7由于物体的加速度等于滑轮边缘的线速度,则αR a =,与以上各式联立解得22121rad/s 3021)(30sin =++︒-=g mR R m m m m α N 340)(1T1=-=αR g m FN 316)30sin (2T2=+︒=αR g m F2m/s 3==αR a(2) m 1到达地面的时间为s 0.816s 3122=⨯==a h t 5-8 飞轮质量为60 kg ,半径为0.25 m ,当转速为1000 r/min 时,要在5 s 内令其制动,求制动力F ,设闸瓦与飞轮间摩擦系数μ=0.4,飞轮的转动惯量可按匀质圆盘计算,闸杆尺寸如图5-8所示.分析 制动力F 作用在闸杆上,闸杆在制动力和飞轮的正压力的力矩作用下达到平衡,转动轴在墙上,这是刚体在力矩作用下的平衡问题.由于二力的力臂已知,应该求出闸杆与飞轮之间的正压力.飞轮受到闸杆的正压力、闸瓦与飞轮间摩擦力和轴的支承力作用,其中闸杆的正压力和轴的支承力的力矩为零,在闸瓦与飞轮间摩擦力的力矩作用下制动,应用转动定律可以求出摩擦力矩,然后由摩擦力与正压力关系可以求出闸杆与飞轮之间的正压力.F图5-8解 以飞轮为研究对象,飞轮的转动惯量为221mR J =,制动前角速度为rad/s 6010002⨯=πω,制动时角加速度为tωα-=.制动时闸瓦对飞轮的压力为F N ,闸瓦与飞轮间的摩擦力N f F F μ=,应用转动定律,得αα2f 21mR J R F ==- 则 t mR F μω2N =以闸杆为研究对象.在制动力F 和飞轮对闸瓦的压力-F N 的力矩作用下闸杆保持平衡,两力矩的作用力臂分别为m )75.050.0(+=l 和m 50.01=l ,则有01N =-l F FlN 157N 6054.021000225.06075.050.050.021N 1=⨯⨯⨯⨯⨯⨯⨯+===πμωt mR l l F l l F 5-9 一风扇转速为900 r/min ,当马达关闭后,风扇均匀减速,止动前它转过了75转,在此过程中制动力作的功为44.4 J ,求风扇的转动惯量和摩擦力矩.分析 合外力矩对刚体所作的功等于刚体的转动动能的增量.制动过程中风扇只受摩擦力矩作用,而且由于风扇均匀减速,表明摩擦力矩为恒定值,与风扇角位移的乘积就是所作的功.解 设制动摩擦力矩为M ,风扇转动惯量为J ,止动前风扇的角位移N πθ2=,摩擦力矩所作的功为N M M W πθ2⋅-=-=摩擦力矩所作的功应等于风扇转动动能的增量,即2210ωJ W -= 则 2222m kg 01.0m kg )60/2900()4.44(22⋅=⋅⨯-⨯-=-=πωW J m N 0.0942m N 7524.442⋅=⋅⨯--=-=ππN W M5-10 如图5-10(a )所示,质量为24 kg 的鼓形轮,可绕水平轴转动,一绳缠绕于轮上,另一端通过质量为5 kg 的圆盘形滑轮悬有10 kg 的物体,当重物由静止开始下降了0.5 m 时,求:(1)物体的速度;(2)绳中张力.设绳与滑轮间无相对滑动.分析 这也是一个质点动力学和刚体动力学的综合问题,鼓形轮和滑轮都视为圆盘形定轴转动的刚体,应该采用隔离物体法,分别对运动物体作受力分析,对刚体作所受力矩的分析,然后分别应用牛顿第二定律和转动定律.解 各物体受力情况如图5-10(b )所示,其中F T1= F ’T1,F T2= F ’T2,鼓形轮的转动惯量为2121R m ,圆盘形滑轮的转动惯量为2221r m ,分别应用牛顿第二定律和转动定律,可得ma F mg =-T2222T1T221)(αr m r F F =- 121T121αR m R F =(1) 绳与滑轮间无相对滑动,物体的加速度等于鼓形轮和滑轮边缘的切向加速度,即12ααR r a ==.重物由静止开始下降了h = 0.5 m 时,速度ah 2=v ,由以上各式得αT1 F 2α ’T2 a F T2m g(a ) (b )图5-10m/s 2m/s )524(21105.08.9102)(212221=+⨯+⨯⨯⨯=++==m m m mgh ah v (2)绳中张力为N 48N 5241028.924102211T1=++⨯⨯⨯=++=m m m g mm F N 85N 5241028.9)524(102)(2121T2=++⨯⨯+⨯=+++=m m m g m m m F 5-11 一蒸汽机的圆盘形飞轮质量为200 kg ,半径为1 m ,当飞轮转速为120 r/min 时关闭蒸汽阀门,若飞轮在5 min 内停下来,求在此期间飞轮轴上的平均摩擦力矩及此力矩所作的功.分析 制动过程中飞轮只受摩擦力矩作用,该摩擦力矩不一定为恒定值,但是由于只需求平均摩擦力矩,因此可以假设飞轮均匀减速,由已知条件求出平均角加速度,再应用转动定律求出平均摩擦力矩.解 飞轮转动惯量为221mR J =,关闭蒸汽阀门后t = 5 min 内的平均角加速度为t00ωα-=,应用转动定律,平均摩擦力矩 m N 194m N 60560/212012002121202⋅-=⋅⨯⨯⨯⨯⨯-=-==.t mR J M πωα 在此期间平均摩擦力矩所作的功等于飞轮转动动能的增量J 7896J )60/2120(12002121 21212102220220-=⨯⨯⨯⨯⨯-=⋅-=-=πωωmR J W 负号表示平均摩擦力矩作负功,方向与飞轮旋转方向相反.5-12 长为85 cm 的均匀细杆,放在倾角为45°的光滑斜面上,可以绕过上端点的轴在斜面上转动,如图5-12(a)所示,要使此杆实现绕轴转动一周,至少应给予它的下端多大的初速度?分析 细杆在斜面上转动,斜面的支承力与转轴平行,转轴的支承力通过转轴,它们的力矩都为零,只有重力在转动平面内分量的力矩作功.解 如图5-12(b)所示,杆所受重力在转动平面内的分量为︒45sin mg ,当杆与初始位置的夹角为θ时,重力分量对转轴的力矩为θsin 2145sin l mg ⋅︒,此时若杆有角位移θd ,则重力矩所作的元功为θθd sin 2145sin d ⋅⋅︒=l mg W 杆从最低位置到最高位置重力矩所作的功为︒-=⋅⋅︒-==⎰⎰45sin d sin 2145sin d 0mgl l mg W W πθθ 重力矩所作的功等于此期间杆的转动动能的增量2021045sin ωJ mgl -=︒- 其中231ml J =,t 00v =ω,则 m/s 5.94m/s 45sin 85.08.9645sin 60=︒⨯⨯⨯=︒=gl v5-13 如图5-13(a)所示,滑轮转动惯量为0.012m kg ⋅,半径为7 cm ,物体质量为5 kg ,由一绳与倔强系数k=200 N/m 的弹簧相连,若绳与滑轮间无相对滑动,滑轮轴上的摩擦忽略不计,求:(1)当绳拉直弹簧无伸长时,使物体由静止而下落的最大距离;(2)物体速度达最大值的位置及最大速率.v 0 ︒45 (a) (b) 图5-12分析 下面的5-17题中将证明,如果绕定轴转动的刚体除受到轴的支承力外仅受重力作用,则由刚体和地球组成的系统机械能守恒.如果将滑轮、地球和物体与弹簧组成一个弹性系统和重力系统合成的系统,当无重力和弹性力以外的力作功的情况下,整个系统的机械能守恒,可以应用机械能守恒定律.下面的解则仅应用功能原理和力矩所作的功与刚体转动动能的关系进行计算.解 (1) 物体由静止而下落到最低点时,速度为零,位移为1x ,在此期间重力所作的功完全转换为弹簧弹性势能的增量,即21121kx mgx = m 0.49m 2008.95221=⨯⨯==k mg x (2)物体与滑轮受力如图5-13(b)所示,设物体的最大速率为0v ,此时的位移为0x ,加速度00=a ,滑轮的角加速度000==R a α,分别应用牛顿第二定律和转动定律ma F mg =-T1αJ R F F =-)(T2T1可得此时T1F mg =,F T1= F T2,又因对于轻弹簧有0T2kx F =,则得m 0.245m 2008.950=⨯==k mg x 在此过程中,重力所作之功等于弹性势能的增量、物体动能和滑轮转动动能T1aF ’T1m m g(a) (b)图5-13的增量的和,即2020200212121ωJ m kx mgx ++=v 因R 00v =ω,得 m/s 31.1m/s 9.85)07.001.05(2001)(122=⨯⨯+⨯=+=mg R J m k v5-14 圆盘形飞轮A 质量为m ,半径为r ,最初以角速度ω0转动,与A 共轴的圆盘形飞轮B 质量为4m ,半径为2r ,最初静止,如图5-14所示,两飞轮啮合后,以同一角速度ω转动,求ω及啮合过程中机械能的损失.分析 当物体系统所受的合外力矩为零时,系统的角动量守恒,在此过程中,由于相互作用的内力作功,机械能一般不守恒.解 以两飞轮组成的系统为研究对象,由于运动过程中系统无外力矩作用,角动量守恒,有 ωωω2202)2(4212121r m mr mr += 得 0171ωω= 初始机械能为2022021412121ωωmr mr W =⋅=啮合后机械能为 2022222241171)2(421212121ωωωmr r m mr W =⋅+⋅=则机械能损失为 1202211716411716W mr W W W ==-=∆ω 5-15 一人站在一匀质圆板状水平转台的边缘,转台的轴承处的摩擦可忽略A图5-14不计,人的质量为m ’,转台的质量为10 m ’,半径为R .最初整个系统是静止的,这人把一质量为m 的石子水平地沿转台的边缘的切线方向投出,石子的速率为v (相对于地面).求石子投出后转台的角速度与人的线速度.分析 应用角动量守恒定律,必须考虑定律的适用条件,即合外力矩为零.此外还应该注意到,定律表达式中的角动量和角速度都必须是对同一惯性参考系选取的,而转动参考系不是惯性参考系.解 以人、转台和石子组成的系统为研究对象,由于系统无外力矩作用,角动量守恒,设转台角速度ω的转向与投出的石子速度v 方向一致,初始时系统角动量为零,得0=+v mR J ω 人和转台的转动惯量为221021R m R m J '+'=,代入上式后得 Rm m '-=6v ω 人的线速度 mm R '-=='6v v ω 其中负号表示转台角速度转向和人的线速度方向与假设方向相反.5-16 一人站立在转台上,两臂平举,两手各握一个m = 4 kg 的哑铃,哑铃距转台轴r 0 = 0.8 m ,起初,转台以ω0 = 2π rad/s 的角速度转动,然后此人放下两臂,使哑铃与轴相距r = 0.2 m ,设人与转台的转动惯量不变,且J = 52m kg ⋅,转台与轴间摩擦忽略不计,求转台角速度变为多大?整个系统的动能改变了多少?分析 角动量守恒定律是从定轴转动的刚体导出的,却不但适用与刚体,而且适用于绕定轴转动的任意物体和物体系统.解 以人、转台和哑铃组成的系统为研究对象,由于系统无外力矩作用,角动量守恒,有ωω)2()2(2020mr J mr J +=+rad/s 12.0rad/s 22.04258.042522220220=⨯⨯⨯+⨯⨯+=++=πωωmr J mr J 动能的增量为J183 J )2()8.0425(21J 12)2.0425(21 )2(21)2(2122222020220=⨯⨯⨯+⨯-⨯⨯⨯+⨯=+-+=-=∆πωωmr J mr J W W W 5-17 证明刚体中任意两质点相互作用力所作之功的和为零.如果绕定轴转动的刚体除受到轴的支承力外仅受重力作用,试证明它的机械能守恒.分析 在刚体动力学中有很多涉及重力矩作功的问题,如果能证明当只有重力矩作功时刚体和地球组成的系统机械能守恒,就能应用机械能守恒定律,而且还可以用刚体的质心的势能代替整个刚体中所有质点势能的总和,使求解过程大大简化. 证 刚体中任意两质点相互作用力沿转轴方向的分量对定轴转动不起作用,而在垂直于转轴的平面内的分量F 和-F 大小相等,方向相反,作用在一条直线上,如图5-17所示.设F 与转轴的垂直距离为ϕsin r ,则当刚体有微小角位移θd 时,力F 所作的功为θϕd sin Fr ,而其反作用力-F 所作的功为θϕd sin Fr -,二者之和为零,即刚体中任意两质点相互作用力所作之功的和为零.绕定轴转动的刚体除受到轴的支承力外仅受重力作用,刚体中任意质点则受到内力和重力作用,当刚体转动时,因为已经证明了任意两质点相互作用内力所作之功的和为零,则刚体中各质点相互作用力所作的总功为零,而且轴的支承力-F图5-17也不作功,就只有重力作功,因此机械能守恒.5-18 一块长m 50.0=L ,质量为m '=3.0 kg 的均匀薄木板竖直悬挂,可绕通过其上端的水平轴无摩擦地自由转动,质量m =0.1kg 的球以水平速度m/s 500=v 击中木板中心后又以速度m/s 10=v 反弹回去,求木板摆动可达到的最大角度.木板对于通过其上端轴的转动惯量为231L m J '= . 分析 质点的碰撞问题通常应用动量守恒定律求解,有刚体参与的碰撞问题则通常应用角动量守恒定律求解.质点对一点的角动量在第四章中已经讨论过,当质点作直线运动时,其角动量的大小是质点动量和该点到质点运动直线的垂直距离的乘积.解 对球和木板组成的系统,在碰撞瞬间,重力对转轴的力矩为零,且无其他外力矩作用,系统角动量守恒,碰撞前后球对转轴的角动量分别为021v mL 和v mL 21-,设碰后木板角速度为ω,则有 ωJ mL mL +-=v v 21210 设木板摆动可达到的最大角度为θ,如图5-18所示,木板摆动过程中只有重力矩作功,重力矩所作的功应等于木板转动动能的增量,即)1(cos 21d sin 2121002-'=⋅'-=-⎰θθθωθgL m L g m J (1) 由以上两式得388.050.08.90.34)1050(1.0314)(31cos 2222202=⨯⨯⨯+⨯⨯-='+-=gL m m v v θ ︒==19.67)388.0arccos(θ根据5-17的结果,由于木板在碰撞后除受到轴的支承力外仅受重力作用,v mm ’g图5-18它的机械能守恒,取木板最低位置为重力势能零点,达到最高位置时它的重力势能应等于碰撞后瞬间的转动动能,也可以得到(1)式.5-19 半径为R 质量为m '的匀质圆盘水平放置,可绕通过圆盘中心的竖直轴转动.圆盘边缘及R /2处设置了两条圆形轨道,质量都为m 的两个玩具小车分别沿二轨道反向运行,相对于圆盘的线速度值同为v .若圆盘最初静止,求二小车开始转动后圆盘的角速度.分析 当合外力矩为零时,应用角动量守恒定律应该注意到表达式中的角动量和角速度都是对同一惯性参考系选取的.转动参考系不是惯性参考系,所以小车对圆盘的速度和角动量必须应用相对运动速度合成定理转换为对地面的速度和角动量.解 设两小车和圆盘的运动方向如图5-19所示,以圆盘的转动方向为正向,外轨道上小车相对于地面的角动量为)(v -ωR mR ,内轨道上小车相对于地面的角动量为)21(21v +ωR R m ,圆盘的角动量为ωω221R m J '=.对于两小车和圆盘组成的系统,外力对转轴的力矩为零,角动量守恒,得ωωω221)21(21)(R m R R m R mR '+++-v v Rm m m )25(2'+=v ω vωv图5-19。
大学物理5-4 电通量 高斯定理

求 电场强度分布。 解 电场强度垂直带电平面, 选取 垂直带电面的圆柱形高斯面 S e E dS E dS E dS E dS
侧 左底 右底
0
左底
E dS E dS
右底
0 E1S E2 S
• q 在球心处,球面电通量为
dS
e E dS EdS E dS
S
S
S
q 4 π 0r
2
4π r
2
q
q
r
0
穿过球面的电力线条数为 q/ 0
• q 在任意闭合面内,电通量为 • q 在闭合面外,电通量为
e q / 0
e 0
穿出、穿入闭合面电力线条数相等
5.4 电通量
一、电力线(电场线) E
dN
高斯定理
场强方向沿电力线切线方 向,场强大小取决于电力 线的疏密
+
-
dS
dN E dS
• 电力线起始于正电荷
(或无穷远处),终止 于负电荷(或无穷远 处)。 • 电力线不相交。
二、电通量
穿过任意曲面的电力线条 数称为通过该面的电通量 1. dS 面元的电通量
E 由所有电荷决定,但 e EdS 与外部电荷无关,只
取决于内部电荷。
0
q1
0
q2
0
q3
1
0
q内
静电场高斯定理
1 e E dS
S
0
q内
真空中的任何静电场中,穿过任一闭合曲面的电通量,等
于该曲面所包围的电荷电量的代数和乘以 1 0
大学物理学(课后答案)第5-6章

第5章 机械振动一、选择题5-1 一个质点作简谐振动,振幅为A ,在起始时刻质点的位移为2A-,且向x 轴的正方向运动,代表这个简谐振动的旋转矢量图为[ ]分析与解 图中旋转矢量投影点的运动方向指向Ox 轴正向,同时矢端在x 轴投影点的位移为2A-,满足题意,因而选(D)。
5-2 作简谐振动的物体,振幅为A ,由平衡位置向x 轴正方向运动,则物体由平衡位置运动到32Ax =处时,所需的最短时间为周期的几分之几[ ] (A) 1 /2 (B) 1/4 (C) 1/6 (D) 1/12分析与解 设1t 时刻物体由平衡位置向x 轴正方向运动,2t 时刻物体第一次运动到32A x =处,可通过旋转矢量图,如图5-2所示,并根据公式2t T ϕπ∆∆=得31226t T T T ϕπππ∆∆===,,因而选(C)。
5-3 两个同周期简谐振动曲线如图5-3(a)所示,1x 的相位比2x 的相位[ ] O O OO A Axxx(A) (B)(D)(C)A /2-A /2 A /2 -A /2A Aωωωωx习题5-1图习题5-2图(A) 落后2π (B) 超前2π(C) 落后π (D) 超前π分析与解 可通过振动曲线作出相应的旋转矢量图(b ),正确答案为(B )。
5-4 一弹簧振子作简谐振动,总能量为E ,若振幅增加为原来的2倍,振子的质量增加为原来的4倍,则它的总能量为[ ](A) 2E (B) 4E (C) E (D) 16E 分析与解 因为简谐振动的总能量2p k 12E E E kA =+=,因而当振幅增加为原来的2倍时,能量变为原来的4倍,因而答案选(B)。
5-5 两个同振动方向、同频率、振幅均为A 的简谐振动合成后,振幅仍为A ,则这两个简谐振动的相位差为[ ](A) 60 (B) 90 (C) 120 (D) 180分析与解 答案(C )。
由旋转矢量图可知两个简谐振动的相位差为120时,合成后的简谐运动的振幅仍为A 。
高考物理一轮总复习(固考基+抓细节+重落实)5-4 功能关系与能量守恒定律的应用课件(含13高考、14模拟)
2 v +W 克, 物
4.如图 5- 4- 2 所示,一质量均匀的不可伸长的绳索重 为 G, A、 B 两端固定在天花板上,今在最低点 C 施加一竖 直向下的力将绳拉至 D 点,在此过程中绳索 AB 的重心位置 将( ) A.逐渐升高 C.先降低后升高 B.逐渐降低 D.始终不变
图 5- 4- 2
图 5- 4- 1
A.物块的机械能逐渐增加 1 B.软绳重力势能共减少了 mgl 4 C.物块重力势能的减少等于软绳克服摩擦力所做的功 D.软绳重力势能的减少小于其动能的增加与克服摩擦 力所做功之和
【解析】
取斜面最高点为参考平面,软绳重力势能减
l l 1 少量 ΔEp 绳 =mg -mg sin 30° = mgl,选项 B 正确;物块向 2 2 4 下运动,对物块,除重力以外,绳拉力对物块做负功,物块 机械能减少, 选项 A 错误; 设 W 克为软绳克服摩擦力做的功, 1 2 1 对系统由功能关系得 ΔEp 绳 +ΔEp 物= mv + m 2 2 1 又因为 ΔEp 物 > m 物 v2,故选项 C 错而 D 对. 2
【审题指导】 (1)物体是否一直做匀加速直线运动?传 送带对物体做功时,哪些能发生转化?根据功能关系计算传 送带对物体做的功. (2)传送带与物体之间发生了相对滑动,怎样计算因摩擦 产生的热量?电动机做的功使哪些能量发生了转化?利用功 能关系计算电动机做的功.
【答案】 BC
2. (2013· 广州模拟 )下列说法正确的是 (
)
A.随着科技的发展,第一类永动机是可以制成的 B.太阳照射到地球上的光能转化成了其他形式的能量, 但照射到宇宙空间的能量都消失了 C.“既要马儿跑,又让马儿不吃草”违背了能量转化 和守恒定律,因而是不可能的 D.有种“全自动”手表,不用上发条,也不用任何形 式的电源,却能一直走动,说明能量可以凭空产生
2019-2020学年人教版八年级上册物理精讲精练5-4 眼睛和眼镜(含答案解析)

专题5.4 眼睛和眼镜1.眼睛的晶状体相当于凸透镜,视网膜相当于光屏.当睫状体放松时,晶状体比较薄,远处物体射来的光线刚好能汇聚在视网膜上,眼睛可以看清远处的物体;当睫状体收缩时,晶状体变厚,近处物体射来的光线刚好能汇聚在视网膜上,眼睛可以看清近处的物体。
2.近视眼看不清远处的物体,原因是晶状体太厚折射能力太强,或眼球在前后方向上太长,因此来自远处某点的光线汇聚在视网膜前,远处的物体成像在视网膜前面,到达视网膜上的是一个模糊的光斑。
需要佩戴凹透镜矫正。
3.远视眼看不清近处的物体,是因为晶状体太薄折射能力太弱,或眼球在前后方向上太短,因此来自近处某点的光线还没汇聚就到达视网膜上了,近处的的物体成像在视网膜后面,在视网膜上形成一个模糊的光斑。
需要佩戴凸透镜矫正。
知识点一:眼睛 1.眼睛的晶状体相当于凸透镜,视网膜相当于光屏(胶卷);2.当睫状体放松时,晶状体比较薄,远处物体射来的光线刚好能汇聚在视网膜上,眼睛可看清远处的物体;当睫状体收缩时,晶状体变厚,近处物体射来的光线刚好能汇聚在视网膜上,眼睛可看清近处的物体。
【例题1】(经典题)下图是人的眼睛构造图。
人眼的结构和照相机十分相似:角膜和晶状体相当于照相机的_____透镜,瞳孔相当于_________,脉络膜相当于暗箱,视网膜相当于_______。
【答案】凸,光圈,底片。
课前预习知识点解读与例题突破【解析】人眼的结构和照相机十分相似:角膜和晶状体相当于照相机的凸透镜,瞳孔相当于光圈,脉络膜相当于暗箱,视网膜相当于底片。
知识点二:近视眼及其矫正1.成因:近视眼看不清远处的物体,原因是晶状体太厚折射能力太强,或眼球在前后方向上太长,因此来自远处某点的光线汇聚在视网膜前,远处的物体成像在视网膜前面,到达视网膜上的是一个模糊的光斑。
2.矫正:佩戴凹透镜。
【例题2】(2019山东德州)如图所示的四幅图中,表示近视眼成像情况的是,矫正方法的是。
(填序号)【答案】③;①。
人教版八年级物理上册 第5章第4节眼睛和眼镜教案

第4节眼睛和眼镜【知识与技能】1.了解眼球的构造,知道眼睛是怎样看清物体的.了解用眼护眼常识.2.了解近视眼和远视眼的成因,知道近视眼和远视眼的矫正方法.【过程与方法】1.通过对“眼睛是怎样看清远处和近处物体的”以及“近视眼和远视眼成因”的探究,培养学生信息收集、信息处理能力以及分析问题、概括问题的能力.2.通过对“眼睛是怎样看清远处和近处物体的”以及“近视眼和远视眼成因”的探究,让学生经历科学探究过程,学习科学探究的基本方法.【情感、态度与价值观】1.通过对“眼睛是怎样看清远处和近处物体”以及“近视眼和远视眼成因及矫正”的探究,形成尊重事实的科学态度,培养勇于创新的科学精神.2.通过用眼护眼教育,强化眼保健意识,教育学生热爱生活、珍爱健康.【重点】眼睛是怎样看清远处和近处物体的,近视和远视的成因及矫正.【难点】近视和远视的成因.知识点一眼睛【自主学习】阅读课本P100,完成以下问题:1.眼睛好像一架照相机,晶状体和角膜共同作用相当于一个凸透镜,视网膜相当于胶卷.2.眼睛通过睫状体来改变晶状体的形状.看远处物体时,睫状体放松,晶状体变薄,折光能力变弱,远处物体射来的光线刚好会聚于视网膜上;看近处物体时,睫状体收缩,晶状体变厚,折光能力变强,近处物体射来的光线刚好会聚于视网膜上.3.正常人眼观察近处物体最清楚,而又不疲劳的距离大约是25 cm,这个距离叫做明视距离.【合作探究】探究一眼睛1.结合眼睛的模型和照相机的成像图,观察眼睛的结构.你知道眼睛是如何看到物体的吗?答:晶状体和角膜相当于一个凸透镜,视网膜相当于光屏,当物体的像成在视网膜上时,我们就看见物体了.2.眼睛睫状体起什么作用?答:眼睛的睫状体的作用是调节晶状体的形状,当睫状体放松时,晶状体比较薄,远处物体射来的光刚好会聚在视网膜上,眼球可以看清远处的物体;当睫状体收缩时,晶状体变厚,对光的偏折能力变大,远处物体射来的光会聚在视网膜上,眼睛就可以看清近处的物体.3.眼睛中瞳孔起什么作用?答:眼睛瞳孔的作用是能改变大小以控制进入眼睛的光线量,若在一个阳光普照的室外环境下,由于我们的眼睛不用太多光线来观看物体,瞳孔会自动收缩;相反,在漆黑的环境下,由于我们需要更多的光线来看物体,瞳孔便会自动扩张,瞳孔好像照相机的光圈.4.视网膜起什么作用?答:眼睛中视网膜的作用是把物体成的像的光能转变为神经冲动,再经过通往大脑的神经把神经冲动传入中枢神经系统,到达大脑皮层的视觉中枢,产生视觉,视网膜就好像照相机的底片.5.既然晶状体和角膜的共同作用相当于一个凸透镜,那么物体能成什么样的像?答:光线由物体射入眼球,经过角膜和晶状体的折射,然后到达视网膜形成倒立、缩小的像,但我们看见的都是正立的物像,是因为大脑调节作用的影响.【教师点拨】1.外界的物体在人的视网膜上所成的是倒立的像,而人看到的却是正立的像,是由于大脑中的视觉神经的自动调整作用所致.2.利用凸透镜成像模拟眼睛成像从而来理解眼睛成像及调节特点的方法,在物理上运用得非常广泛,称为模型法.3.在凸透镜像距一定时,调节焦距,也可以使不同物距的物体在光屏上成清晰的像.【跟进训练】人眼是世界上最精密的照相机(选填“照相机”“幻灯机”或“放大镜”),晶状体相当于一个凸透镜,视网膜相当于胶卷,只有成像在视网膜上才会看清物体.知识点二近视眼及其矫正【自主学习】阅读课本P100-101,完成以下问题:1.近视眼只能看清近处物体,看不清远处物体.2.产生近视眼的原因是晶状体太厚,折光能力太强,或者眼球在前后方向上太长,因此来自远处某点的光会聚在视网膜前.3.近视眼应配戴凹透镜制成的镜片.【合作探究】演示小游戏:三字经请两位同学上台,一个视力正常的同学,一个近视眼的同学,请近视眼的同学摘掉眼镜.教师出示印有三字经的卡片,从两位同学眼前开始,每念一个卡片上的字后退一步,逐步后退.活动中发现有些人单靠自身眼睛的调节已不能使像成在视网膜上,这种情况是怎么形成的?答:由于长期不注意适度用眼,使晶状体变凸,睫状体调节能力降低,远处的景物的像落在视网膜前面,形成近视眼.探究二实验:近视眼的矫正1.应用什么透镜来矫正近视眼?答:凹透镜能使光发散,应用凹透镜来矫正近视眼.2.用实验的方法验证自己的猜测.(1)所需器材有哪些?答:凸透镜、蜡烛、光屏、近视眼镜一副、火柴等.(2)实验探究的过程是怎样的?答:①将点燃的蜡烛放在离凸透镜较远处,使光屏上呈现烛焰像.②如图所示,将凸透镜看作眼睛的晶状体,将光屏看作视网膜,给“眼睛”戴上近视眼镜,使烛焰在“视网膜”上成清晰的像.③移去近视眼镜,光屏上的像变模糊了,这就是近视眼所看到的景象.沿靠近凸透镜方向移动光屏,直到光屏上能重新呈现清晰的像.(3)由实验过程中观察到的现象可得出什么结论?答:近视眼在观察远处的物体时,物体通过晶状体所成的像落在视网膜的前方.矫正近视眼所配戴的镜片是凹透镜.凹透镜的作用是使像相对于晶状体向后移,从而能在视网膜上成清晰的像.【教师点拨】1.近视眼晶状体折光能力过强,成像于视网膜前,利用凹透镜对光的发散作用,在眼睛的前方戴一个凹透镜使远处的物体正好成像在视网膜上.如果戴的眼镜对光的发散作用没有使像刚好成在视网膜上,也就不能达到矫正视力的效果.因此,近视患者要配戴度数合适的近视眼镜,不是随便找个凹透镜就可以矫正近视眼的视力.2.现在还有一种矫正近视眼视力的方法,就是将角膜中间凸出的部分削薄一点,减小角膜的曲度,从而减小角膜的折光能力,达到矫正视力的目的.【跟进训练】如图所示,将凸透镜看作是眼睛的晶状体,光屏看作是眼睛的视网膜,烛焰看作是眼睛观察的物体.拿一个近视眼镜给“眼睛”戴上,光屏上出现烛焰清晰的像,而拿走近视眼镜则烛焰的像变得模糊.那么在拿走近视眼镜后,下列操作能使光屏上重新得到清晰像的是(C)A.将光屏适当远离凸透镜B.将蜡烛适当远离凸透镜C.将光屏适当移近凸透镜或将蜡烛适当移近凸透镜D.同时将光屏和蜡烛适当远离凸透镜知识点三远视眼及其矫正【自主学习】阅读课本P101,完成以下问题:1.远视眼只能看清远处物体,看不清近处物体.2.产生远视眼的原因是晶状体太薄,折光能力太弱,或者眼球在前后方向上太短,因此来自近处某点的光会聚在视网膜后.3.远视眼应配戴凸透镜制成的镜片.【合作探究】探究三 远视眼1.远视眼的成因是?答:远视眼是由于晶状体太薄,近处物体的像成在了视网膜后面而看不清.2.根据远视眼的成因猜想一下远视眼的矫正方法.答:凸透镜对光有会聚作用,可用凸透镜将光线会聚,使近处物体传来的光线仍能会聚在视网膜上,从而看清近处的物体.知识拓展 眼睛的度数1.什么是透镜焦度?答:通常把透镜焦距的倒数叫做透镜焦度,用Φ表示.2.透镜焦度用公式如何表示?答:Φ=1f(f 为透镜焦距).单位:Φ—— m -1,f —— m. 3.眼镜片的度数如何求得?答:镜片的透镜焦度乘100的值就是眼镜片的度数,即眼镜度数=透镜焦度×100.4.凸透镜和凹透镜的度数表示有何区别?答:凸透镜的度数用正数表示,凹透镜的度数用负数表示.【教师点拨】1.判断眼睛是近视眼还是远视眼,关键看光的会聚点是在视网膜前还是在视网膜后.2.将近视眼与远视眼对比起来学习,可以大大提高学习效率,且对近视眼、远视眼的特征理解更透彻,记忆得更牢固.因此对比法是学习同类型知识的一种重要方法.【跟进训练】如图所示a 、b 是同一人的两幅照片,b 图中他拿的眼镜( B )abA .属于凸透镜,可用于矫正近视眼B.属于凸透镜,可用于矫正远视眼C.属于凹透镜,可用于矫正远视眼D.属于凹透镜,可用于矫正近视眼1.眼睛的工作原理(1)成像特点:倒立、缩小的实像.(2)调节:改变焦距.(3)明视距离:眼睛距物体25 cm处.2.近视眼和远视眼(1)近视眼(会聚点提前):凹透镜矫正.(2)远视眼(会聚点置后):凸透镜矫正.完成本课对应训练.。
八年级物理上册说课稿:第五章5.4运动的相对性

八年级物理上册说课稿:第五章5.4 运动的相对性一、教材分析本节课是八年级物理上册的第五章 5.4 运动的相对性。
本章主要内容是介绍物体运动中相对位置、相对速度、相对运动方向等概念,并运用相对性原理解释相对位置、相对运动速度的变化规律。
通过本章的学习,学生能够深入理解运动的相对性原理,并能够运用所学知识解决与相对性相关的问题。
二、教学目标1. 知识与能力目标•掌握相对位置、相对速度、相对运动方向等概念;•了解物体运动中的相对性原理;•能够运用相对性原理解释相对位置、相对速度的变化规律;•能够运用所学知识解决与相对性相关的问题。
2. 过程与方法目标•培养学生的观察、分析与实验能力;•引导学生积极参与课堂讨论,培养合作学习与独立思考能力。
3. 情感态度目标•培养学生对物体运动中相对性的兴趣与好奇心;•引导学生尊重科学实验与观察的结果,培养科学态度。
三、教学重点和难点1. 教学重点•相对位置、相对速度、相对运动方向等概念的理解;•相对性原理的掌握与应用。
2. 教学难点•运用相对性原理解释相对位置、相对速度的变化规律;•能够运用所学知识解决与相对性相关的问题。
四、教学内容与步骤1. 导入与复习(5分钟)导入前,老师可以通过两个学生示范一个简单的相对运动实验,引起学生的兴趣与好奇心。
导入阶段,老师可以回顾上一节课的内容,让学生复习与相对性相关的知识点。
2. 概念讲解与实例分析(10分钟)在这个部分,老师可以通过示意图、实际运动的实例等方式,向学生介绍相对位置、相对速度、相对运动方向等概念。
同时,老师可以通过多个具体的例子,让学生深入理解这些概念。
3. 定律总结与讨论(15分钟)在这个步骤中,老师可以引导学生观察运动实例,并总结相对位置与相对速度的变化规律。
老师可以指导学生进行小组讨论,激发学生的合作学习与独立思考能力。
4. 练习与实例分析(15分钟)在这个步骤中,老师可以出示一些练习题,让学生运用所学知识解决与相对性相关的问题。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.(多选)做匀速圆周运动的物体,下列物理量中不变的是() A.速度B.速率
C.角速度D.加速度
解析:速率为标量,角速度为矢量,但是大小和方向都没有变化.答案:BC
2.关于匀速圆周运动,下列说法正确的是()
A.匀速圆周运动是匀速运动
B.匀速圆周运动是匀变速曲线运动
C.匀速圆周运动是变加速曲线运动
D.做匀速圆周运动的物体必处于平衡状态
解析:匀速圆周运动的速度方向时刻变化,导致加速度也是变量.答案:C
3.(多选)做匀速圆周运动的物体()
A.因相等时间内通过的弧长相等,所以线速度恒定
B.如果物体在0.1 s内转过30°,则角速度为300 rad/s
C.若半径r一定,则线速度与角速度成正比
D.若半径为r,周期为T,则线速度v=2πr/T
解析:线速度v=s/t,反映质点沿圆弧运动的快慢程度,是矢量,大小恒定,方向沿圆弧切线方向,在不断地改变,故不能说v恒定.答案:CD
4.电脑中的CD—ROM(光驱)(如右图所示)是通过极细的激光束照射到高速转动的光盘上来读取信息的,目前广泛采用的是一种始终保持恒定的角速度来旋转光盘的CA V(Constant Angular Velocity)技术,用这种方法读取数据时,下列说法中正确的是() A.在光盘内圈读取数据的速度快
B.读取数据的快慢与是在内圈还是在外圈无关
C.在光盘外圈读取数据的速度快
D.在光盘外圈和内圈读取数据的速度一样快
解析:根据同轴角速度相同,半径越大线速度越大的道理判断,C项正确.
答案:C
5.如图所示为一种早期的自行车,这种不带链条传动的自行车前轮的直径很大,这样的设计在当时主要是为了()
A.提高速度
B.提高稳定性
C.骑行方便
D.减小阻力
解析:在骑车人脚蹬车轮转速一定的情况下,据公式v=ωr知,轮子半径越大,车轮边缘的线速度越大,车行驶得也就越快,故A选项正确.
答案:A。