fx-4500PA档外弧垂观测法编程
CASIOfx4500PA计算器程序和操作

CASIOfx-4500PA计算器程序和操作一、水准测量高程计算程序1、程序名:H-(1)第一行:L1 lbl 0 第二行:L2 Z:A:{BK}第三行:L3 H=Z+A-B◢第四行:L4 V=K-H ◢第五行:L5 Goto 02、操作步骤①开机:按AC键:②呼出文件名:按FILE键,显示H-(1)文件名为止:③按EXE键,显示Z?,输入水准点BM后视点高程:如129.919;④按EXE键,显示A?,输入后视水准尺读数:如1.633;⑤按EXE键,显示B?,输入前视水准尺读数:如4.186;⑥按EXE键,显示H=127.366,此结果是K3+300中桩地面髙程;⑦按EXE键,显示K?,输入K3+300中桩设计高程127.032;⑧按EXE键,显示V=K-H,-0.334此结果是K3+300中桩挖出数据;⑨按EXE键,显示B?,连续算下去……(-挖;+填)。
二、坐标反算程序①1、程序名;1ZBFS第一行:L1 AB:Fixm:{CD}第二行:L2 Pol(C-A,D-B)◢第三行: L3 W<0 =〉W=W+360第四行:L4 lntW+0.01lnt()+0.006 Frac(60 Frac W)◢2、操作步骤①开机:按AC键:②呼出文件名:按FILE键,显示1ZBFS文件名为止:③按EXE键,显示A?,输入第一点x坐标:如363.567(也可当测站);④按EXE键,显示B?,输入第一点y坐标:如814.454(也可当测站);⑤按EXE键,显示C?,输入第二点x坐标:如406.260 (也可作后视点);⑥按EXE键,显示D?,输入第二点y坐标:如1029.145(也可作后视点);⑦按EXE键,显示Pol(C-A,D-B):218.89476为两点间距离;⑧按EXE键,显示lntW+0.01lnt(60 Frac W)+0.006 Frac(60 Frac W)78.45108两点方位角;(即是78°45′11″)三、坐标正算程序1、程序名;2ZBZS第一行:L1 AB:Lbl5:{ST}第二行:L2 C=A+Rce(S,T)◢第三行:L3 D=B+W◢第四行:L4 Goto52、操作步骤①开机:按AC键:②呼出文件名:按FILE键,显示2ZBZS文件名为止:③按EXE键,显示A?,输入第一点x坐标:如363.567;④按EXE键,显示B?,输入第一点y坐标:如814.454;⑤按EXE键,显示S?,输入两点间距离:如218.89476;⑥按EXE键,显示T?,输入两点方位角:如78°45′10.8″;⑦按EXE键,显示C=A+Rce(S,T),为第二点x坐标:如406.260;⑧按EXE键,显示D=B+W,为第二点y坐标:如1029.14499;四、坐标反算程序②1、程序名;ZF第一行:L1 Lbl 0第二行:L2 A:B:{CD}:C≤0 G=〉oto2第三行:L3 X=C-A第四行:L4 Y=D-B第五行:L5 S=Pol(X,Y)◢第六行:L6 T=W第七行:L7 T<0=〉第八行:L8 T=W ◢第九行:L9 Goto 0第十行:L10 Lbl 1第十一行:L11 T″T″=360+T◢第十二行:L12 Goto 0第十三行:L3 lbl 2第十四行:L14 {AB}第十五行:L15 Goto 02、操作步骤①开机:按AC键:②呼出文件名:按FILE键,显示ZF文件名为止:③按EXE键,显示A?,输入第一点x坐标:如363.567 ;④按EXE键,显示B?,输入第一点y坐标:如814.454;⑤按EXE键,显示C?,输入第二点x坐标:如354.618;⑥按EXE键,显示D?,输入第二点y坐标:如553.341;⑦按EXE键,显示Pol(C-A,D-B)S=Pol(X,Y):261.2663为两点间距离;⑧按EXE键,显示T=268.0371接着按SHIFT °′″键显T=268°2′13.55″为两点的方位角;⑨按EXE键,显示C?,输入下一点x值;⑩重复以上操作方法(略)五、线路直线段点坐标计算程序(1) ㈠本可计算前切线YZ至ZY点(或后切1、程序名;Z-X,Y(1) 线ZY至YZ)间直线上任点中、边桩坐标。
CASIO fx——4500p计算机测量程序在路桥中线测设中的应用

1 = . ̄ . Q Ad 3 -
D_ Rs n 2 iB
L 1l E, 4 :{
E” X ’ :Fr 0 ’ Y. 2 曲线不同类型的计算方法。缓和曲线的前进方向分为左转和右转型式 , . 2 在进行程序运算过程 中, 只需分清类型 , 将程序调换到不同计算程序分别计 1 = + cs = + s Q . X E D oQ Y F D i 5 n 算, 在计算任意桩号处坐标过程中, 根据曲线特性和基本计算公式, 计算得出 L = +c ( -, o IY Si( - -0 6H X So Q - ) = + s Q 9 ) s  ̄- 9 n  ̄ L = + csQ.+ 0 JY S i( +0 7G X S o( + 9 ) = +sn ̄B 9 ) - B 弦距 M和偏角 Q 然后将其局部坐标值转换到大地坐标系与设计统一, , 利用 L 8 GOTO 0 其结果用于放样和复核。 3 利用计算机内的程序 , 4 根据公路中线设计曲线要素 , 分别对其路线中桩 基本计算公式 : d 2 . * d */ - 8 5 L R 1 6 3 M= X + ( 2Y 坐标加以 计算。 在计算过程中, 由于曲线前进方向分为左转和右转 , 左转时切 X- l OR2s I J 线方位角为 A B右转时切线方位角为 A B此处需根据设计在计算时对程 ^, +, Y_ j RL lf s 6 序加以调整 。 另外计算边桩坐标时 , 也需根据路线前进方向, 分别对左右边桩 任意桩 号处 坐标 计算 公式 : = + o(: ; = O Ms (. 。 X1XOMcsa- YlY + i aQ) t Q) n ̄ - 的计算方位角加以调整( 注意程序中公式正负号的调整 ) 。 注:+为右转 , ” “” “ 为左转。 一 总结 : 在旌工中 , 测量人员可以配备一 台 C S . 5 o (8 o ) A I f _ o p4 0 p计算 O 4 圆曲线段任意桩号坐标推算程序是根据圆的特性,以圆心为坐标原点 器 , 因其价 比 P - S 01 0 > , 格 C E 0 (50 便易 另外其程序的编制也比较简单。 本着简 以中心轴线为 X 轴建立坐标 系, 根据桩间距( 任意桩号到 H 或 Y Y H点的弧 单 、 易用和方便的原则 , 在实际测量放样中, 利用 C S - 5 0 计算器对 A I f4 0p O x 长 ) 圆心角 , 推算 以圆心到 H Y或 Y H点的方位角为起始边反算出圆心点到 路线计算数据进行了大量的计算 , 简化了许多操作过程。 任意桩号处的方位角 O距离 M R 根据距离和方位角反算任意桩处坐标。 , =, 计 算公式如下 : a= / 1 0 iLs R* 8 ( 上接 4 页 ) 能量损失较大, 夯击中心易改变, 1 耳 影响施工质量。 Q= +-a iA ( )i 4 满夯时能量不宜过大 , j 一般加固深度达 3 m即可, 夯击彼此搭接, 不留空 D= R 档 , 则出现 死角 , 响加 固效 果 。 否 影 XlX0-c Q Y = 0-s Q = + o i Rs lY - i i t n R 4 严格控制前后两遍夯击的间隔时间 , 止 4 I 防 孔隙水压积累 , 影响强夯效果。
CASIO4500坐标计算程序

CASIO4500坐标计算程序HUANHEQUXIANK〝JD〝D〝LS〝:B=D2/24R:M=D/2-DB/10RT=M+tan.5A(R+B)▲L=∏RA/180+D▲E=(R+B)/cos.5A-R▲Z〝ZH〝=K-T▲H〝HY〝=Z+D▲Q〝QZ〝= Z+L/2▲J〝YH〝=Z+L-D▲O〝HZ〝J+D▲prog 1▲N〝N=1=>V〝:P:prog 3:L=W:FixmLb1 2:{S}:S〝KX〝:S>J=>Goto4△S>H=>Goto3△U=S-Z:E =U-UXY5/40R2D2:F=UXY3/6RD:Goto5Lb1 3:U=90(2S-2H+D)/ ∏R:E=RsinU+M:F=R-RcosU+B:Goto5Lb1 4:F=O-S:D≠0=>I=30F2/∏RD△V=F-FXY3/90R2:N=1=>U= 360-A:F=180-A+I: ≠=>U=A:F-180+A-I△E=T+TcosU+VcosF:F=Tsi nU+VsinF:Goto1Lb1 5:N=1=>F=-F△Lb1 1:X=E:Y=F:P=1=>prog2: prog4△: prog3:W=W-L:W<0=>W=W+360△V: 〝S〝▲W: 〝R〝▲Goto2X=C+EcosL-FsinL▲Y=G+EsinL+FcosL▲C〝X0〝G〝Y0〝:Pol(X-C,Y-G):W<0=>W=W+360△WD≠0=>Q=>90U2/∏RD△Fixm:I=A-3I:N=1=>Q=-Q:U=-U:I=-I△S<H=>F=L+Q≠=>S>J=>F=L+I: ≠=>F=L+U△△V=1: {E}:E〝<B〝:F〝R〝=F+E:Lb1 6: {I}:I〝SL〝:X+IcosF▲Y+IsinF▲V <2=>V=V+1:Goto6△ZHI XIANE〝X0〝F〝Y0〝A〝R0〝K〝CZ〝:Lb1 1: {S}=S〝KX〝:D=S-K: X=E+DcosA▲Y=F+DsinA▲V=1:Lb1 2: {BI}:H=A+B-180:I〝SL〝:X +IcosH▲Y+IsinH▲V<2=>V=V+1:Goto2△Goto1计算要素:JD——交点里程 LS——缓和曲线长R ——圆曲线半径 A ——线路转角T ——切线长 L ——圆弧总长度E ——外矢距 N ——曲线方向,左偏取“1”,右偏取“0”P ——取“1” X0.Y0——ZH点坐标X.Y——交点坐标 KX——待求点里程B ——与中线夹角 SL——边距,左“+”;右“-”-- 作者:admin-- 发布时间:2005-8-15 9:43:10--CASIO4800超高计算程序超高及高程(源程序)L1: R:L“LS”:Z“ZH”:H“HZ”:V“RS”:F“I1”:G“I2”:O“BP H”:N“BP”:T=Vabs(G-F)÷2:X“X(R+1,L-1)”:P“P(R+,L-1)”L2: Lbl 6 : {S}L3: S+T-N<0 D=O+(S-N)F: S-N<0 D=O+(S-N)F-U(S-N+T)2÷2÷V: S-N≤T D=O+(S-N)G-U(T-S+N)2÷2÷V: D=O+(S-N)G D“H=”◢L4: R< E= : M= Goto 1: R< E= : M= Goto 1:L5: Lbl 1 : M ≥ L C=L: Goto 2: C=ML6: Lbl 2 : P X >0 Goto 3 : Goto 4L7: Lbl 4 : S ≤Z I=0.02 : Goto 5: S<Z+C I=0.02-(0.02-EP X)÷C×(S-Z) : Goto 5: S<H-C I=EPX : Goto 5: S<H I=EPX+ (0.02-EPX)÷C×(S-H+C) : Goto 5: I=0.02 : Goto 5L8: Lbl 3 : Z[1]=0.04÷(EPX+0.02)×C : S ≤Z + Z[1] I=0.02 : Goto 5: S<Z+C I=0.02+(EPX-0.02)÷(C-Z[1])×(S-Z-Z [1]) : Goto 5: S<H-C I=EPX : Goto 5: S<H-Z[1] I=EPX-(EPX -0.02)÷(C-Z[1])×(S-H+C) : Goto 5: I=0.02 : Goto 5L9: Lbl 5 : {B} : W“HB”=D-IB◢L10: Goto 6说明: R:平曲线半径 L“LS”:缓和曲线长 P:偏转,Z=-1,Y=1 X“XL”:线路(Z,Y)左线=-1,右线=1 Z“ZH”: 直缓点里程H“HZ”:缓直点里程 V“RS”:竖曲线半径 F“I 1”:前坡堵(带符号)G“I2”:后坡度值(带符号) O“BPH”:变坡点高程 N“BP”:变坡点里程T:切线长 E:最大超高值 C :渐变段长度(LC)I:横坡值 M:最大渐变长度(Lmax) B :距中心距离 W“HB”:边部高程-- 作者:admin-- 发布时间:2005-8-15 9:43:38--CASIO4800计算程序曲线任意里程中边桩坐标正反算(CASIO fx-4800P计算器)程序曲线任意里程中边桩坐标正反算(CASIO fx-4800P计算器)程序一、程序功能本程序由一个主程序(TYQXJS)和两个子程——正算子程序(SUB1)、反算子程序(SUB2)序构成,可以根据曲线段——直线、圆曲线、缓和曲线(完整或非完整型)的线元要素(起点坐标、起点里程、起点切线方位角、线元长度、起点曲率半径、止点曲率半径)及里程边距或坐标,对该曲线段范围内任意里程中边桩坐标进行正反算。
CASIOfx-4500PA自动计算程序

CASIOfx-4500PA自动计算程序:F1 HW(已知两点坐标,求两点间距离与方位角)L1 Lbl 0:{ABCD}:S=Pol(C-A,D-B◢L2 W<0=>W=360+W◢L3 ≠>W>0=>W=W◢Goto 0F2 ZB(已知一点坐标,另一点的方位角及两点间距离,求另一点坐标)L1 Lbl 0:{ABDFIJ}:X=A+cosF×D◢L2 Y=B+sinF×D◢L3 N=F-90:P=X+cosN×I◢L4 Q=Y+sinN×I◢L5 K=F+90:S=X+cosK×J◢L6 O=Y+sinK×J◢ Goto 0F3 HDQFY(右偏缓和曲线上点的计算)L1 Lbl 0:{RLHFIJAB}:X=H-H X Y5/(40R X Y2L X Y2:Y=H X Y3/(6RL)-H X Y7/(336R X Y3L X Y3:V=tan-1(y/x:M=√(X X Y2+Y X Y2:U=90H X Y2/(πRL:C=A+COS(F+V)×M◢L2 D=B+sin(F+V)×M◢L3 N=F+U-90:P=C+cosN×I◢L4 Q=D+sinN×I◢L5 K=F+U+90:G=C+cosK×J◢L6 O=D+sinK×J◢ Goto 0F4 HDQFZ(左偏缓和曲线上点的计算)L1 Lbl 0:{RLHFIJAB}:X=H-H X Y5/(40R X Y2L X Y2:Y=H X Y3/(6RL)-H X Y7/(336R X Y3L X Y3:V=tan-1(y/x:M=√(X X Y2+Y X Y2:U=90H X Y2/(πRL:C=A+COS(F-V)×M◢L2 D=B+sin(F-V)×M◢L3 N=F-U-90:P=C+cosN×I◢L4 Q=D+sinN×I◢L5 K=F-U+90:G=C+cosK×J◢L6 O=D+sinK×J◢ Goto 0F5 YQXZBY(右偏圆曲线上点的计算)L1 Lbl 0: {RFABIJH}:M=90H/π/R:V=F+M:D=2RsinM:X=A+cosV×D◢L2 Y=B+sinV×D◢L3 N=V+M-90:P=X+cosN×I◢L4 Q=Y+sinN×I◢L5 K=V+M+90:S=X+cosK×J◢L6 O=Y+sinK×J◢ Goto 0F6 YQXZBZ(左偏圆曲线上点的计算)L1 Lbl 0: {RFHABIJ}:M=90H/π/R:V=F-M:D=2RsinM:X=A+cosV×D◢L2 Y=B+sinV×D◢L3 N=V-M-90:P=X+cosN×I◢L4 Q=Y+sinN×I◢L5 K=V-M+90:S=X+cosK×J◢L6 O=Y+sinK×J◢ Goto 0F7 PJY(缓和曲线全偏角[右偏]计算)L1 Lb1 0:{RLV}:M=90L/π/RL2 M<360-V=>F=V+M◢ ≠=>F=V+M-360◢L3 ◣Goto 0F8 PJZ(缓和曲线全偏角[左偏]计算)L1 Lb1 0:{RLV}:M=90L/π/RL2 M≤V=>F=V-M◢ ≠=>F=V-M+360◢L3 ◣Goto 0。
Fx4500程序

Fx-4500计算器简单程序一、名称:ZX,SX—JD,已知线上两点坐标、测站坐标、方位角,求交点坐标和平距程序:L1 {A,B,C,D,E,F,G}:A”X1”:B”Y1”:C”X2”:D”Y2”:E”XZ”:F”YZ”:G”FZ-J”L2 H=(D-B)/(C-A):I=(C×B-A×D)/(C-A):J=tanG:K=F-J×EL3 M”XJ--“=(K-I)/(H-J)▲N”YJ—“=M×N+I▲L”P--“=√((M-N)2+(N-F)2) ▲运行:1、输入线上两点坐标X1,Y1;X2,Y22、输入测站坐标XZ,YZ3、输入测站至方位角FZ-J4、输出交点坐标XJ,YJ;测站与交点平距P—二、名称:XD, 已知线上两点1、2的坐标、测站坐标、某点在两点间(+)或外(-)与1点或2点距,求该点坐标,测站至该点平距、方位角程序:L1 {A,B,C,D,E,F,G,H}:A”X1”:B”Y1”:C”X2”:D”Y2”:E”XZ”:F”YZ”:G”NW=N(+)W(-)1/2”:H”DJ”L2 I=C-A:J=D-B:K=√(I2+J2)L3 G=1→M=A+H×I/K:N=B+H×J/K△L4 G= -1→M=A-H×I/K:N=B-H×J/K△L5 G=2→M=C-H×I/K:N=D-H×J/K△L6 G= -2→M=C+H×I/K:N=D+H×J/K△L7 S=M-E:T=N-F:O=√(S2+T2)L8 S≥0→P=0:≠→P=180△L9 Q=tan-1(T/S)+PL10 M”XDX=”=M▲N”XDY=”=N▲O”P=”=O▲Q”FWJ=”=Q▲运行:1、输入线上两点坐标X1,Y1;X2,Y22、输入测站坐标XZ,YZ3、判断某点在两点间(+)或外(-)与1点或2点距NW=N(+)W(-)1/2,即+1、+2、-1、-2(例如输入-2表示该点在1点——2点外距2点已知)4、输入该点与1点或2点距离DJ5、输出该点坐标XDX,XDY,测站至该点平距P、方位角FWJ三、名称:ZX--JD, 已知线1上两点坐标和线2上两点坐标,求二者交点程序:L1 {A,B,C,D,E,F,G,H}:A”X1”:B”Y1”:C”X2”:D”Y2”:E”X3”:F”Y3”:G”X4”:H”Y4”L2 I=(D-B)/(C-A):J=(C×B-A×D)/(C-A)L3 K=(H-F)/(G-E):L=(F×G-E×H)/(G-E)L4 M”JX”=(L-J)/(I-K) ▲N”JY”=M×I+J▲运行:1、输入线1上两点坐标X1,Y1;X2,Y22、输入线2上两点坐标X3,Y3;X4,Y43、输出交点坐标JX,JY四、名称:MJ,已知多边角点坐标求面积程序:L1 F=0:{A,B}:A”X1”:B”Y1”:G=A:H=BL2 Lbl 0:{C,D}:C”X2”:D”Y2”L3 F=(B+D)×(C-A)/2+F:A=C:B=D:{E}:E”END-Y/N=1/2”L4 E=2→Goto 0△L5 F”MJ”=F+(G+D) ×(H-C)/2▲运行:1、输入线上两点坐标X1,Y1;X2,Y22、判断点输入完否END-Y/N=1/23、输出面积MJ五、名称:MJL,明渠均匀流已知流量试算水深程序:L1 {Q,N,I,B,H,M,Y}:Q”Q=”:N”N=”:I”I=”:B”B=”:H”H0=”:M”M=”:Y”△H=”L2 Lbl 1:A=(B+M×H)×H:X=B+2H√(1+M2):R=A/XL3 O=A×Rx y(1/6)/N×√(R×I)L4 O>Q→H=H-Y:Goto1≠→H▲△L5 H=H+Y:Y=Y/10: Goto1运行:1、输入流量Q=、糙率N=、底坡比I=、底宽B=、计算水深初值(>真值)H0=、H0至真值第减步距(10N)△H=、2、输出水深H(精确到10N)3、回车输出水深H(精确到10N-1)4、回车输出水深H(精确到10N-2)…六、名称:ZBPF,已知两点坐标求平距、方位角程序:L1 {A,B,C,D }:A”X0”:B”Y0”:C”XC”:D”YC”L2 F=C-A:E=tan-1((D-B)/F):P”PJ”=Pol(D-B,F) ▲L3 F>0→J”FWJ”=E▲≠→J”FWJ”=E+180▲△运行:1、输入起点X0,Y0;终点XC,YC2、输出平距PJ、方位角FWJ七、名称:YQFX,圆曲线放线已知测站坐标、圆心坐标、半径、方位角求平距、交点坐标(迭代法)程序:L1 Lbl 1:{A,B, F,G,H,I}:A”XZ”:B”YZ”:F”FWJ”:G”>PJ”:H”<PJ0”:I”JD”:Q=1L2 Lbl 2:X=CosF×G+A: Y=SinF×G+B : Prog SUB1:L=O: Q=0L3 Lbl 3:X=CosF×H+A: Y=SinF×H+B : Prog SUB1: M= OL4 J=(G+H)/2:X=CosF×J+A: Y=SinF×J+B : Prog SUB1:N= OL5 K”JD”= Abs(N×(G-H)/(L-M)): Pause 2L6 K≤I→J”PJ”=J▲X▲Y▲△L7 L×M≥0→Goto 1△L8 L×N≥0→G=J:Goto 2:≠→H=J:Goto 3△SUB1L1 Q=1→{ C,D,E }:C”X0”:D”Y0”:E”R”△L2 O=(X-C)2+(Y-D)2-E2运行:1、输入测站坐标XZ,YZ、方位角FWJ、比真值大于值>P、小于值<P、精度目标JD02、输入圆心坐标X0,Y0、半径R3、中断闪现计算精度JD变化4、当JD≤JD0时输出平距PJ、交点坐标X、Y5、当大于值>PJ与小于值<PJ不跨越圆或不相交时反回第一步八、名称:MJL(YQFX), 明渠均匀流已知流量试算水深(圆曲线放线--迭代法)程序:L1 Lbl 1:{A,B, F,G,H,I}:A”XZ”:B”YZ”:F”FWJ”:G”>PJ”:H”<PJ0”:I”JD”:Q=1L2 Lbl 2:X=CosF×G+A: Y=SinF×G+B : Prog SUB2:L=O: Q=0L3 Lbl 3:X=CosF×H+A: Y=SinF×H+B : Prog SUB2: M= OL4 J=(G+H)/2:X=CosF×J+A: Y=SinF×J+B : Prog SUB2:N= OL5 K”JD”= Abs(N×(G-H)/(L-M)): Pause 2L6 K≤I→J”PJ”=J▲X▲Y▲△L7 L×M≥0→Goto 1△L8 L×N≥0→G=J:Goto 2:≠→H=J:Goto 3△SUB2; A,B, F,G,H,I,X,Y,J,L,M,N,K已被定义,O固定定义为输出L1 Q=1→{C,V,P,U,W}:C”Q=”:V”N=”:P”I=”:U”B=”:W”M=”△L2 S=(U+W×X)×X:T=U+2X√(1+W2):R=S/TL3 O= S×Rx y(1/6)/V×√(R×P)-C运行:1、输入测站坐标XZ=0,YZ=0、方位角FWJ=0、比真值大于值>PJ、小于值<PJ 且≠0、精度目标JD02、输入流量Q、糙率N、底坡比I、底宽B3、中断闪现计算精度JD变化4、当JD≤JD0时输出水深PJ、水深X、Y=05、当大于值>PJ与小于值<PJ不跨越圆或不相交时反回第一步分析:程序七和八主程序相同而子程序不同,将交汇曲线方程移项为O=F(X,Y)=0,不能用A,B, F,G,H,I,X,Y,J,L,M,N,K作为条件变量输入即可。
CASIOfx-4500P,4800P程序

N
+
计算曲线长。G、H加E-21的目的是防止“0”溢出,增强程序的通用性。
(
O
+
U
)
/
2
:
″
Q
X
C
=
″
◢
G
=
R
O
+
EXP
(-)
2
1
:
H
=
R
U
+
EXP
(-)
2
1
L3
V(I)
=
O
:
W(J)
=
L
-
O
-
U
:
K
=
U
调用子程序Z2,计算曲线坐标。
:
Prog
Z
2
L4
Y
=
Y
Z
/
Sin
P
:
X
-
Y
Cos
P
:
″
计算第一切线长L1、第二切线长L2。
(
O
+
W(J)
)
/
2
R
L4
E
=
K
-
(
U
xy
5
-
(
U
-
K
)
xy
求第二缓和曲线坐标增量计算元素E和F。
5
)
/
4
0
H2
:
F
=
(
U
xy
3
-
(
U
-
K
)
xy
3
)
/
6
H
-
(
U
xy
常用FX4500程序
8
圆曲线放样程序(2)
(Filename)13YQXFY2
L1 Lbl5:{ZS}:ABXYRGZPKS L2 T=P+K Abs (Z-G)×180/π/R L3 Rec(S+R,T) : C=X+V : D= Y+W L4 Prog 1ZBFS L5 Goto5
说明:
o
(X,Y)
(A,B)
Z
(C,D) S
说明: 1、本程序用于利用 3 个合适的已知点进行方向后方交会法计算测站坐标。 2、观测、计算时将 3 个已知点按顺时针方向对应排列,已知点的直角坐标分别为(A,B)、(C,D)
和(E,F)。对应 3 个已知点的方向值分别为 O、P、Q。 3、L3 至 L9 行的作用是当两相邻方向间的夹角出现直角或平角时将导致不能计算时进行自动处理。 4、为提高解算精度和防止错误,宜尽可能使测站点与 3 个已知点组成较理想的图形,如采取测站
6
面积计算程序
(Filename)10 MJJS
L1 SAB:Lbl2:{XYN} L2 S=S+(X+A)(Y-B)/2 L3 A=X:B=Y
L4 N=0 ⇒ Goto5 Goto2
L5 Lbl5:S◢
说明:
(X2 ,Y2 )
(Xi ,Yi )
(X1 ,Y1 )
(Xn ,Yn )
Y
(Xi+1 ,Yi+1)
(Filename)2ZBZS
L1 AB:Lbl5:{ST}
L2 C=A+Rec(S,T)◢
L3 D=B+W◢
L4 Goto5
说明: 1、本程序用于当已知起算点的直角坐标、起算点到目标点的边长和坐标方位角时,计算目标点的
CASIOfx—4500PA地形程序123
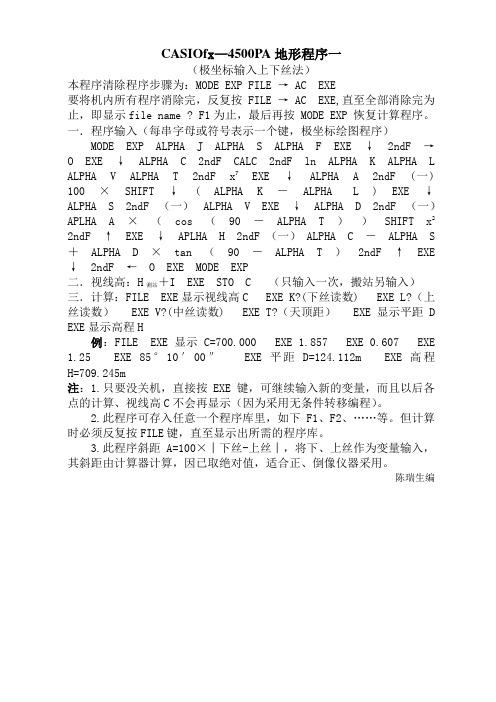
CASIOf x—4500PA地形程序一(极坐标输入上下丝法)本程序清除程序步骤为:MODE EXP FILE → AC EXE要将机内所有程序消除完,反复按 FILE → AC EXE,直至全部消除完为止,即显示file name ? F1为止,最后再按 MODE EXP 恢复计算程序。
一.程序输入(每串字母或符号表示一个键,极坐标绘图程序)MODE EXP ALPHA J ALPHA S ALPHA F EXE ↓ 2ndF →O EXE ↓ ALPHA C 2ndF CALC 2ndF ln ALPHA K ALPHA L ALPHA V ALPHA T 2ndF x y EXE ↓ ALPHA A 2ndF (一) 100 × SHIFT ↓ ( ALPHA K - ALPHA L ) EXE ↓ALPHA S 2ndF (一) ALPHA V EXE ↓ ALPHA D 2ndF (一)APLHA A ×( cos ( 90 - ALPHA T )) SHIFT x22ndF ↑ EXE ↓ APLHA H 2ndF (一) ALPHA C - ALPHA S + ALPHA D × tan ( 90 - ALPHA T ) 2ndF ↑ EXE ↓ 2ndF ← O EXE MODE EXP二.视线高:H测站+I EXE STO C (只输入一次,搬站另输入)三.计算:FILE EXE显示视线高C EXE K?(下丝读数) EXE L?(上丝读数) EXE V?(中丝读数) EXE T?(天顶距) EXE显示平距D EXE显示高程H例:FILE EXE显示C=700.000 EXE 1.857 EXE 0.607 EXE 1.25 EXE 85°10′00″EXE 平距D=124.112m EXE 高程H=709.245m注:1.只要没关机,直接按EXE键,可继续输入新的变量,而且以后各点的计算、视线高C不会再显示(因为采用无条件转移编程)。
放线、断面积计算程序(4500)
放线计算程序
用CAS10 fx-4500PA 计算器
一、程序功能:
计算任一点桩号的坐标,输入导线点坐标(放置仪器导线点)能计算前视导线点与该桩的方位角及距离,输入边桩至中桩的距离,就能推算出边桩的坐标、方位角及距离。
四、计算导线点至已知点坐标的方位角、距离:
断面积计算程序
(用CAS10 fx-4500PA 计算器、坐标法计算)
方法一:
各点坐标(X,Y)顺序输入(1~2~3~4~5~6~7~8~9……~1),各点坐标输完后,再输入X=0.01结束。
程序如下:
S=θ:W=θ:A=θ:B=θ:Lbl θ: { X,Y }: X = 0.01 => Goto 1 ◣ W = X B – Y A : A = X : B = Y : S = S + W : Goto θ ◣ Lbl 1 : S = Abs ( S/2 ) ⊿
注:θ表示零;⊿表示实心;◣表示空心;
方法二:
顺序输入各点坐标后,再输入一个X=-1结束。
程序如下:
A = θ:
B = θ:
C = θ:S = θ: Lbl θ:{ X }: X < θ=> Goto 1◣ { Y }:C = θ=> Goto 2 ◣S = S +( X+A )×(Y-B)/2: Lbl 2: A = X : B
= Y: C = C + 1: Goto θ: Lbl 1: S : "S = " ◣。
卡西欧fx-4500PA说明书(1)
第 1 節 設置與操作第 2 節 手控計算第 3 節 積分計算第 4 節 程序計算程序庫u本手冊的內容如有更改恕不另行通知。
u本手冊的任何部分未經本廠的書面同意不准轉載。
u本廠對於因第三者使用本計算器及手冊所造成的損失概不負任何賠償責任。
u本廠對於因使用本計算器及手冊所蒙受的任何資料或方程式的遺失與損害概不負責。
序言感謝您購買卡西歐fx-4500PA型計算器。
本機是最先進的可編程的科學計算器﹐它的特點是具有能同時顯示計算方程式及計算結果的雙行顯示屏。
上行顯示屏是由12個字符的光點式矩陣顯示屏構成﹐可用於顯示字母和數字。
同時﹐fx-4500PA型計算器還具有一個大型容量的程序存儲裝置﹐可供積分計算時使用。
另外﹐可按手寫順序輸入計算方程式的內藏式方程式存儲系統﹐將使您無論是進行重復計算或手控計算時都得心應手。
請您務必先詳細地閱讀本手冊中的各項說明之後﹐再來使用本機。
最後﹐當您閱讀完本手冊的說明之後﹐請妥善保存本手冊﹐以便您日後查閱。
本手冊由四個章節所構成:1. 設置與操作2. 手控計算3. 積分計算4. 程序計算請首先閱讀第1節以熟悉有關機體的術語﹑操作方法以及必須注意的地方。
然後再閱讀第2﹑第3和第4節﹐由實例和解說來掌握各類計算。
第1節 設置與操作鍵記號 (8)模式 (9)手控計算模式 (9)顯示屏 (11)雙行顯示屏 (11)顯示符號 (12)指數顯示 (12)特定顯示功能 (13)使用的注意事項 (14)電源和電池的更換 (15)電池的更換 (15)存儲器輔助電池的更換 (15)主電池的更換 (16)自動關機功能 (17)術語與功能 (18)在開始進行計算操作之前⋯⋯ (27)計算的優先順序 (27)堆棧存儲數 (28)輸入/輸出數字的位數和計算的位數 (28)溢出和錯誤 (29)輸入字符數 (30)訂正 (30)第2節 手控計算基本計算 (34)算術運算 (34)括號計算 (35)百分比計算 (36)數值的小數位數指定﹐有效位數和指數的顯示 (37)存儲器 (39)(1)變量存儲器 (39)陣列型存儲器 (41)存儲內容的刪除 (43)(2)獨立存儲器 (44)特別功能 (46)答案功能 (46)乘號(×)的省略 (46)連續計算功能 (47)錯誤位置顯示功能 (49)多重語句功能 (50)科學函數計算 (52)三角函數和反三角函數 (52)對數函數與指數函數 (53)執行雙曲線和反雙曲線函數 (54)坐標變換 (55)排列和組合 (56)x2﹑x–1﹑x! (57)分數 (58)工學符號計算 (59)2進制﹑8進制﹑10進制﹑16進制計算 (60)2進制和8進制的字組顯示 (61)2進制﹑8進制﹑10進制﹑16進制的轉換 (63)負數的表示 (64)2進制﹑8進制﹑10進制和16進制的加減乘除運算 (65)邏輯運算 (66)統計計算 (67)標準偏差值計算 (67)回歸計算 (70)公式存儲功能 (77)公式存儲功能的用途 (77)第3節 積分計算f(x)函數的輸入與積分的計算 (84)運算實例 (85)積分計算時注意事項 (88)第4節 程序計算程序是什麼? (90)編程 (90)計算方程式 (91)文件名的登記 (91)程序編寫 (92)程序執行 (93)程序的訂正﹑追加和刪除 (95)插入行 (95)在程序的開頭插入一行 (95)程序的訂正 (95)程序檢索 (101)文件名的順序檢索 (101)程序行的順序檢索 (103)直接檢索 (104)文件名稱和程序行中的左右移位 (106)程序的執行 (107)由文件名檢索來執行 (107)以按!5鍵來執行 (108)解除執行 (109)程序調試(錯誤的訂正) (109)簡易的程序指令 (109)轉移指令 (109)子程序 (114)暫停指令 (117)變量輸入指令 (118)Fixm (118)程序剩余容量 (120)確定剩余步驟數 (120)將機體當成數據庫使用 (121)程序庫1.素數因子解析 (126)2.最大公約數 (128)3. ∆↔Y的變換 (130)4.最小損耗匹配 (132)5.集中負荷的懸臂樑 (134)6.正態分佈 (136)7.方程式的數值解(牛頓法則) (138)8.二次方程式 (140)9.復數 (144)錯誤信息一覽表 (154)函數輸入范圍 (155)規格 (158)第1節設置與操作鍵記號模式顯示屏使用的注意事項電源和電池的更換術語與功能在開始進行計算操作之前⋯⋯本鍵的功能將因計算器所設定的操作模式而有所不同(請參閱9頁)﹐若直接按本鍵時﹐它將會執行(–)的功能。
CASIOfx4500P计算器程序

CASIO fx4500P计算器实用程序XCAJCJ 编著二○○一年八月说明本程序稿由于时间仓促及编者水平有限,缺点、错误以及疏漏与不足之处在所难免,恳请大家批评指正。
程序步骤计算:1个字符的文件名算3步(每增加一个字符多算一步),行号算1步,每个字符算1步。
CASIO fx-4500P共有1103步。
XCAJCJ二○○一年八月目录程序1——角度判断 (1)程序2——角度换算① (1)程序3——角度换算② (1)程序4——角度换算③ (1)程序5——角度换算④ (1)程序6——视距测量 (2)程序7——坐标反算 (2)程序8——坐标方位角计算 (2)程序9——坐标正算 (3)程序10——坐标方位角交会计算 (3)程序11——垂距计算 (4)程序12——视差法测距计算 (5)程序13——剖面交点计算 (6)程序14——前方交绘计算 (6)程序15——附合导线近似平差 (7)程序16——渠道中线里程计算 (9)程序17——多边形面积计算 (11)程序18——闭合导线近似平差 (13)程序19——直线交点坐标计算 (14)程序20——极坐标法放样计算 (15)附录1:CASIO fx-4500P错误标示一览表 (16)附录2:常用数学公式 (17)附录3:常用测量公式 (17)附录4:单一附合导线内业平差计算 (20)附录5:勘察分院CAD制图《试行》规定 ............................................. 错误!未定义书签。
CASIO fx 4500P 计算器实用程序版权所有© 2003-2005 XCAJCJ 1程序1——角度判断说明:①程序A 为子程序,对≥360°或<0°的角值进行判断处理。
程序2——角度换算①程序3——角度换算②程序4——角度换算③程序5——角度换算④说明:①程序B 、C 、D 、E 均为子程序,简化测量计算中角度的输入及显示。
4500测量程序
测量程序一、应用CASIO-fx45000PA编写常用的几个程序CASIO-fx45000PA通过编写简单的程序来将计算过程简化。
其算法就是将现成公式堆积,我们可以应用条件语句要将整个曲线统一成一个程序。
(1) CASIO- fx4500PA计算器条件语句格式: a<条件判断符>b = >语句1:≠>语句2 :△ 语句3说明:当条件成立时,进行语句1计算;不成立进行语句2的计算,最后运行语句3(不用可以省略)。
条件判断可以是大于、等于、小于、不等于以及大于等于和小于等于;语句1、语句2可以为计算式也可为GOTO语句。
示例1:已知两点坐标求方位角(取值范围在0°—360°之间)源程序:L1 A”X1”:B”Y1”:C”X2”:D”Y2”L2 E=C-A: F=D-B:I=tan-1(F/E)L3 E>0 = > I=I: ≠>I=I+180L4 I>0 = > I=I: ≠>I=I+360用户在使用时,可以根据提示输入数据便可得出方位角(本程序已调试成功)。
(2)无条件转换语句无条件转换语句即是当程序运行至GOTO n 语句时,程序无条件执行LBI n后的语句。
一个GOTO 相对应一个LBI语句。
无条件语句一般与条件语句相配合使用,实现条件转移。
示例2:在以ZH 点为原点的独立坐标系中,等缓和曲线的单曲线中线放样计算(曲线中不存在短链)。
算法思路:通过曲线上点到ZH点的距离确定它在哪个区段(第一缓和曲线、圆曲线、第二缓和曲线),然后再利用现有公式进行计算。
已知:曲线半径 R 切线长 T 曲线长 L 、缓和曲线长 l0、曲线偏角I(左偏还是右偏),以及曲线起点(ZH)里程和曲线上任意一点的里程。
源程序如下:L1 R“R”:T“T”:L“L”M“L0”:I“PJ”:Z“ZH”:K“RYD“ :AL2 S=K-ZL3 S<M => GOTO 0:≠>S<(L-M) => GOTO 1:≠>GOTO 2:L4 LBI 0L5 N=M : GOTO 3:L6 LBI 1L7 N=S-M: P=M^2/(24R): Q=M/2-M^3/(240R):J=(2*S-M)*90/(R*π)L8 X=R*SINJ+P :Y=-(R*(1-COSJ)+Q)L9 LBI 2L10 N=L-S :GOTO 3:L11 LBI 3L12 C=RM: U=N-N^5/(40C^2)+N^9/(3456C^4):V=N^3/(6C)-N^7/(336C^3)+N^4/(42240N^5)L13 N=S => X=U:Y=-V:≠>X=T*(1+COSI)+U*COSI-V*SINI:Y=-TSINI+XSINI+YCOSIL14 A=1 => X=X▲Y=Y▲≠>X=X▲Y=-Y说明: 用户在使用时即可按提示输入数据即可得到数据。
观测档弧垂的计算

(一)连续档的观测弧垂值计算
1、观测档内未联耐张绝缘子串
如图8-2,观测档观测弧垂值的 计算公式为: (1)观测档架空线悬挂点高差 h<10%l时
2 2
A
f
h
B
f1
l l g f f p fo l 8 p
(2)观测档架空线悬挂点高差 h≥10%l时
f2
(8-1)
2
(2)两端联有耐张绝缘子串 的弧垂值为 2 cos2 g 0 g f f 2 1 4 l g 2.0432 cos2 41139 1.63888 0.031128 2.84 2.89m 2 1 4 225 0.031128
— 观测档架空线悬挂点的 高差角;
l — 观测档架空线的档距, m;
— 架空线的水平应力, N / mm2;
g — 架空线的比载, N / m * mm2。
2、观测档内一端联有耐张绝缘子串
观测档内架空线一端联有耐张绝缘子串的时,如图8-4所示,观测档 观测弧垂值的计算公式为
A
f
A
B
f
(b)
施工时应注意
(1)上图中交跨越点位于线路中心,当被跨越避雷线的 左、右存在高差时,还需测出线路边线与避雷线较高测交 叉点的标高;同理,当线路穿越已有线路时,应测出本线 路的避雷线与已有导线较低侧交叉点的标高。 (2)重要交跨应在前视方向和后视方向各施测一次,彼 此校核。 (3)当新建线路完工后,在试运行之前,需对跨越电力 线路、重要通信线及铁路、公路、架空管道等重要交叉跨 越处的实际垂直高度,按交叉跨越的施测方法进行实测; 并将实测数据,换算成导线最大弧垂状态时与被跨越物的 最小垂直距离;并校核是否能满足规程规定的要求。
弧垂观测方法
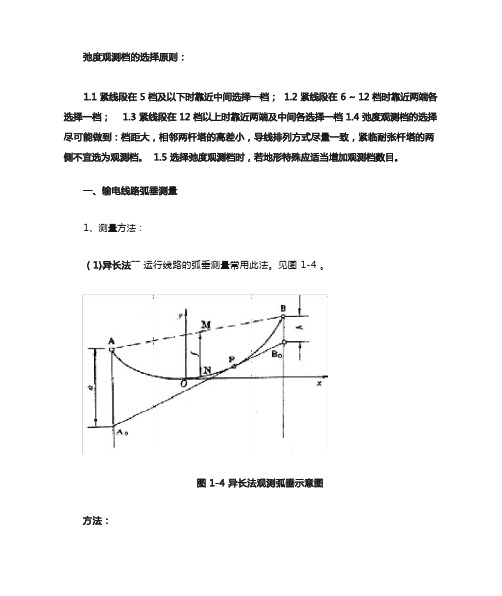
1、测量方法:1-4 。
自观测档的架空线悬挂点 A 处选一合适点使视线与导线相切,分别量取此点及视线在另一杆塔上的交点与导线两悬挂点的垂直距离,得 AA0 =a 和 BB0 =b。
然后由公式a +b = 2 f得观测档弧垂 f。
其适用于观测档内两杆塔不等高,且弧垂最低点不低于两杆塔根部连线的情况。
原理:异长法。
适用:用异长法无法测量的山区、沟壑地段。
按仪器设置的不同分为:档端角度法、档外角度法、平视法和档侧角度法。
1-5式中 a -仪器中心至点 A 的垂直距离;f-为观测气温下计算出的档距中点弧垂 ,m;9 -仪器视线与导线相切的垂直角,即观测角;l -为被测档档距, m;h-两杆塔的高差, m。
――经纬仪仪镜中心置于一侧杆塔外侧。
如图 1-6 。
高差h 0时:f = 41( a + a ltg9 士 h )2或按下式计算:9 = arctan(tan a l b)b = (2 f a )2高差h = 0时:f = 41( a + a ltg9 )2高差h 0时:f = 41( a l 1tg9 + a (l + l 1 ) tg9 h )2 高差h = 0时:f = 41( a l 1tg9 + a (l + l 1 ) tg9 )2式中 l 1 -仪器距一侧杆塔的水平距离, m 。
其余符号同前。
1-7。
高差h 0时:f = 4( a + l 1tg9 + a - (l - l 1 ) tg9 h) 高差h=0时:1注:档内、档外测量法用于观测档无法架设经续仪或档端观测值 b 太小的情况下。
f = 4( a + l 1tg9 + a - (l - l 1 ) tg9 ) 1――用水平仪测或经纬仪测。
:导线最低点的切线呈水平状态。
用水平仪可找到导线的最低点,进而可由公式算出此时的最大弧垂。
P174等长法观测弛度。
等长法是最常用的观测弛度方法,在条件许可时,应优先选用等 长 法。
在观测档相邻两杆塔上,由架空线悬挂点 A 、 B 处各向下量距离 f 绑扎弛度板,然后当只测Na 时f = 21 (|(N a 土 2h))| + N a ( N a 土 h )当只测Nb 时:f = 21 (|(N b 土 2h))| + N b ( N b 土 h )在观测端的弛度板处用弛度观工程望远镜观测。
档端、档外、档内弧垂检测法

1、档端弧垂检测法(仰角)
将仪器支在被检测相悬垂串的正下方,观测出
①、对侧导线悬挂点(放线滑车上边导线的位置)的仰角θ1;
②、导线弧垂点处的仰角θ2。
根据计算公式:f= (√a + √b )2 /4
b = L×(tgθ1- tgθ2)
a =该基塔被测量相导线距仪器横轴中心的垂直距离;
2、档端弧垂检测法(俯角)
将仪器支在最低相悬垂串的正下方,观测出
①、导线悬挂点(放线滑车上边导线的位置)的仰角θ1;
②、导线弧垂点处的仰角θ2。
根据计算公式:f= (√a + √b )2 /4
b = L×(tgθ1+ tgθ2)
a =该基塔被测量相导线距仪器横轴中心的垂直距离;
2
f =[+ ]2/4
L---被检测档档距;
L1---测量点距被检测档两基杆塔中最近杆塔间的水平距离;
θ1---最近杆塔导线悬挂点的角度值;
θ2---导线弧垂点的角度值;
θ3---最远杆塔导线悬挂点的角度值;
f =[+ ]2/4
L---被检测档档距;
L1---测量点距被检测档两基杆塔中最近杆塔间的水平距离;L2---测量点距被检测档两基杆塔中最远杆塔间的水平距离;θ1---最远杆塔导线悬挂点的角度值;
θ2---导线弧垂点的角度值;
值(俯角)
f =[]2/4
L---被检测档档距;
L1---测量点距被检测档两基杆塔中最近杆塔间的水平距离;L2---测量点距被检测档两基杆塔中最远杆塔间的水平距离;θ1---最远杆塔导线悬挂点的角度值;
θ2---导线弧垂点的角度值;
制作一个测量用的记录表格。
4500p计算器计算坐标和方位角及距离-适合两缓等长和不等长程序
求任意点坐标和从仪器至该点方位角、距离程序1QXL1 K“L1”U“L2”RN“FWJ”P“PJ”F“XJ”I“YJ”Z“ZH”L2 L=24R:Y=AbsPL3 T“T1”=(R+U2/L-(R+K2/L)cosY)/sinY+K/2-K3/(10RL)L4 A“T2”=(R+K2/L-(R+U2/L)cosY)/sinY+U/2-U3/(10RL)L5 Y“HZ”=Z +лRY/180+(K+U)/2◢L6 LbI 0:{X}L7 X“CDL”L8 L=Abs(X-Z)+10-9L9 X≤Z=〉D=X-T-Z: Q=N:Goto1:≠〉X≤Z+K=〉Goto2:≠〉X≤Y-U=〉Goto3:≠〉L=Abs(X-Y)+10-9: X≤Y =〉Goto4:≠〉D=A+L:Q=N+P:Goto2⊿⊿⊿⊿L10 LbI 1L11 C“X2”=F+DcosN◢E“Y2”=I+DsinN◢:prog3f: Goto5L12 LbI 2L13 prog 5fL14 W=JL15 prog 2f: Goto5L16 LbI 3L17 J=90(2L-K)/(Rπ)L18 S=RsinJ+0.5K-K3/(240R2)L19 M=R(1-cosJ)+K2/(24R)L20 O=√(S2+M2)L21 J=tg-1(M/S)L22 W=30K/(Rπ)+60(L-K)/(Rπ)L23 prog2f: Goto5L24 LbI 4L25 K=UL26 prog 5fL27 V=O:D=√(T2+A2+2TAcosAbsP)L28 O=√(V2+D2-2VDcos(sin-1(TsinAbsP/D)-J))L29 J=sin-1(AsinAbsP/D)- sin-1(Vsin(sin-1(TsinAbsP/D)-J)/O)L30 W=(AbsP-3tg-1(M/S))/3L31 prog 2f : Goto5L32 LbI 5:{W}L33 W“HD”=0=> {k}:Goto0:≠>prog6F△L34 Goto52fL1 P>0=>J=N+J:Q=N+3W:≠>J=N-J:Q=N-3W△L2 C“X2”=F-TcosN+ O cosJ◢E“Y2”=I-TsinN+ O sinJ◢L3 prog 3f3fL1 C“X2”E“Y2”G“X1”H“Y1”L2 M=E-HL2 S=C-GL3 prog 4f4fL1 J=tg-1(M/(S+10-9))L2 S<0=>V“f”=J+180◢≠>M>0=>V“f”=J◢≠>V“f”=J+360◢△△L3 V“C”=√(S2+M2)◢5fL1 S=L-L5/(40R2K2)+10-9L2 M=L3/(6RK)-L7/(336(RK)3)L3 O =√(S2+M2)L4 J=tg-1(M/S)6FL1 W>0=>L=Q+B“QYJ”:≠>L=Q+B+180△L2 V“X3”=C+AbsWcosL◢:O“Y3”=E+AbsWsinL◢L3 M=O-H:S=V-GL4 prog 4f9ZXL1 QF“X0”I“Y0”G“X1”H“Y1”L2 LbI 8: {U}L3 U“L”≥0=〉L=Q: ≠〉L=Q+180△L4 C“X2”=F+AbsUcosL▲E“Y2”=I+AbsUsinL▲prog3fL5 LbI 9: {W}L6 W“HD”=0=>Goto8:≠>prog6 F△L7 Goto9程序执行:开机——FILE——EXE此时屏幕出现L1? 输入左侧第一条缓和曲线长度后执行EXE此时屏幕出现L2? 输入右侧第二条缓和曲线长度(如左右缓和曲线等长输入L1值即可)后执行EXE 此时屏幕出现R? 输入圆曲线半径后执行EXE此时屏幕出现FWJ? 输入ZH点至JD方向的方位角后执行EXE此时屏幕出现L2? 输入右侧第二条缓和曲线长度(如左右缓和曲线等长输入L1值即可)后执行EXE 此时屏幕出现PJ? 输入转向角(曲线顺时针输入正数,逆时针输入负数)后执行EXE此时屏幕出现XJ? 输入交点横坐标后执行EXE此时屏幕出现YJ? 输入交点纵坐标后执行EXE此时屏幕出现ZHL? 输入直缓点里程后执行EXE此时屏幕出现CDL? 输入测点里程后执行EXE此时屏幕出现X2=XXXX.XXX(该值为线路中线上求出的测点横坐标),执行EXE此时屏幕出现Y2=XXXX.XXX(该值为线路中线上求出的测点纵坐标),执行EXE此时屏幕出现X1? 输入架仪器点(即:测站点)横坐标后执行EXE此时屏幕出现Y1? 输入架仪器点(即:测站点)纵坐标后执行EXE此时屏幕出现f=xx.xxxx该值为求出的从测站至测点的方位角,执行EXE此时屏幕出现C=xx.xxxx该值为求出的从测站至测点的水平距离,执行EXE此时屏幕出现HD? 代表中线上测点至左右两侧的横向距离(此值输入0则继续求下一个测点坐标,如输入负横向距离则求线路中线左侧点坐标,如输入正横向距离则求线路右侧点坐标),执行EXE当HD输入0时屏幕出现CDL? 重复上述步骤即可。