数字化花生摘果测力系统研制
新型花生摘果机的设计

新型花生摘果机的设计摘果机的设计是为了解决花生摘果的问题,提高摘果效率和质量。
下面是一种新型花生摘果机的设计。
1.结构设计该花生摘果机的结构主要由机架、驱动系统、传动系统、摘果装置和控制系统组成。
机架采用优质钢材焊接而成,稳定且耐用。
驱动系统采用电动机驱动,提供动力为摘果机运行。
传动系统采用齿轮传动和链条传动,保证各部件的正常运转。
摘果装置主要包括摘果机械手和摘果储存装置,用于摘取花生果实并将其存放在储存装置中。
控制系统包括电气控制和机械控制,用于控制摘果机的运行和动作。
2.工作原理该花生摘果机的工作原理是通过机械手将成熟的花生果实摘取下来,然后将其存放在摘果储存装置中。
具体工作流程如下:首先,电动马达提供动力给传动系统,传动系统将马达的动力传递给摘果机械手;然后,摘果机械手通过机械控制系统调整位置和角度,准确地抓取花生果实;接下来,摘果机械手将摘取的花生果实放入摘果储存装置中;最后,电气控制系统对机械手和传动系统进行控制,保证摘果机的正常运行。
3.创新点该花生摘果机的创新点主要体现在以下几个方面:1)摘果机械手的设计:摘果机械手具有多个活动关节,可以根据花生果实的不同形状和位置进行灵活调整和抓取,提高了摘果的准确性和效率。
2)摘果储存装置的设计:摘果储存装置采用分格设计,每个格子都有足够的容量来装载花生果实,避免果实之间碰撞造成损坏,并且方便快速取出和清理。
3)电气控制系统的设计:电气控制系统采用先进的传感技术和自动控制算法,能够根据果实的形状和位置自动调整机械手的运动轨迹和速度,提高摘果的准确性和稳定性。
4.优势与应用该花生摘果机具有以下优势:1)高效率:摘果机械手能够持续不断地进行摘果,大大提高了摘果的效率,节约了人力和时间成本。
2)摘果质量好:机械手精确地根据果实的形状和位置进行抓取,避免了过度损伤果实,保证了摘果的质量。
3)可靠性高:该摘果机的结构牢固,采用优质的材料制造,具有较高的使用寿命和稳定性。
全喂入式摘花生鲜果装置研制与试验分析
3 正交试验结果分析
图 6 花生摘果试验装置 Fig. 6 Peanut stripping test equipment
3. 1 正交试验方案和结果 试验 时,调 节 滚 筒 转 速 分 别 为 300、400、500r /
min,分别称取 4. 0、5. 0、6. 0kg 的花生秧果均匀、有序 地铺放在 长 5m、宽 0. 4m、速 度 1. 0m / s 的 输 送 带 上 ( 即喂入量为 0. 8、1. 0、1. 2kg / s) ,按照表 3 进行正交 试验方案,结果如表 3 所示。
试验前,先把花生整齐排放在皮 带 输 送 机 上,接 通电源,调定滚筒转速,设定输送速度,输送花生至摘 果滚筒;摘果 齿 拽 着 花 生 秧 蔓 做 圆 周 运 动,受 罩 壳 上 导向板导向作用,秧蔓沿轴向移动,秧蔓从出口排出, 花生荚果从圆钢筛的孔中落下。
1. 圆钢筛 2. 导向板 3. 罩壳 4. 滚筒转轴 5. 摘果齿 6. 辐盘 图 7 摘果滚筒
第2 期
图 5 不同放置方式的压力值 Fig. 5 Different direction of the pressure values
2 试验装置设计与试验方案
2. 1 试验装置设计和工作过程 全喂入摘花生 鲜 果 试 验 装 置 主 要 由 摘 果 滚 筒 、调
速器和输送机构等组成,如图 6 所示。摘果滚筒由圆 钢筛、导向板、滚 筒 转 轴 和 摘 果 齿 等 组 成,如 图 7 所 示。试验装置的摘果齿型、数量可换,摘果间隙、滚筒 转速、喂入量可调。表 2 为试验装置主要结构参数。
65 mm 和 摘 果 齿 3 排 为 最 佳 工 作 参 数 ,破 碎 率 和 未 摘 净 率 分 别 为 1 . 62 % 和 1 . 03 % 。该 工 作 参 数 可 以 为 全 喂 入 式
新型花生摘果机的设计
新型花生摘果机的设计一、引言花生是一种重要的粮食作物,在农业生产中广泛种植。
传统的花生摘果工作主要依赖人工完成,其效率低下,劳动强度大。
为了提高花生摘果的效率和减轻劳动强度,我们设计了一种新型的花生摘果机,以实现自动化的摘果过程。
本文将详细介绍该机器的设计和工作原理。
二、设计思路本设计旨在设计一种能够自动摘取花生的机器,通过机械装置实现自动化作业。
该机器包括花生识别装置、夹取装置、传输装置和控制系统等组成部分。
花生识别装置通过光学传感器或图像识别技术,实时监测花生的位置和状态,判断是否可以进行摘果操作。
夹取装置通过夹爪和传动系统,能够准确夹取花生,并将其放置到传输装置上。
传输装置是一个带有输送带的装置,能够将夹取的花生传送到集中的收集箱内。
控制系统通过对机器进行编程控制,实现花生的自动识别、夹取和传输。
三、具体设计1.花生识别装置花生识别装置采用图像传感器和图像处理技术,能够实时识别花生的位置和状态。
图像传感器将花生的图像传输到图像处理系统中,通过算法进行花生的特征提取和识别,判断花生是否可以进行摘果操作。
这样可以提高花生的识别准确率,并提高摘果的效率。
2.夹取装置夹取装置采用夹爪的形式,通过夹爪的开合来夹取花生。
夹爪的开合采用气缸驱动,通过气缸的伸缩动作来控制夹爪的开合程度。
夹爪的设计要考虑到花生的形状和大小,保证夹爪能够准确地夹取花生,并避免损坏花生。
3.传输装置传输装置采用传送带的形式,将夹取的花生传输到集中的收集箱内。
传送带的速度和方向可以通过电机控制,以适应花生的夹取和传输要求。
传送带的设计要保证花生的稳定传输和不受损坏,避免出现堵塞或卡住的情况。
4.控制系统控制系统通过对机器进行编程控制,实现花生的自动识别、夹取和传输。
控制系统采用嵌入式系统,具备快速反应和稳定性的优势。
通过与花生识别装置、夹取装置和传输装置的连接,实现全自动化的花生摘果过程。
四、工作原理1.花生识别装置实时监测花生的位置和状态,将识别的结果传输给控制系统。
花生摘果清选机试验方法及性能分析
c破 =
枷
2 ・ 5
.
碉 ■I
一 ■ _ _ _ ——■_
维普资讯
固 四 固 囝
w 小一 小样 的质 量 g 。
d .总 损 失 率
农 质 与督 机 量 监
降低 而 减 小 。 1 3 .对破碎 率的 影 响 从 三 次 试 验 测定 的数 据 中 明显 看 出 ,第 二 试验
式 中 :E 纯 工作 时 间生产 率 k / ; 一 g h w 果一 纯 工 作 时 间摘果 量 k ( 总 一w 损 ) gw ; T纯一 纯 工作 时 间 h 。
试 验 结 果 分 析
根 据 制定 的试 验 方 法 步 骤 ,对 5 HQ一15 Z 0 0型
重量 二 王亘重量 × 0% 1 0
取样 重 量
a .摘 净 率
c净 =— × 。 。 %
主 要 性 能 指 标 试 验 方 法 的 制 定
花 生 蔓 的 含 水 率 ,测 量 与 计 式 中 :C净 一 摘净 率 ; 算 方 法 和 花 生 果 的含 水 率 方 法 相 W 总 一 花 生 果 的 总 质 量 同。 ( 果 口的花 生 果 质量 +清选 、夹 出 2 、试 验 方法 带 、未 摘 净 损 失 质 量 +取 小 样 的
2 、喂入■的大小对性能指标的影响
a .对 生 产率 的 影 响 试 验 结 果 表 明 ,生产 率 的高低 ,主要 由喂人 量
T纯
大 小 决定 ( 筒 转速 一 定 ) 滚 ,喂 人量 大生 产 率 高 、喂
人 量 小生 产 率 低 。 b 摘 净 率的 影 响 .对 试验 结 果 表 明 ,随着 转 速 的提 高 ,喂 人量 的加
花生捡拾摘果装备设计说明书
本科生毕业论文题目花生捡拾摘果装备的设计系别机械设计班级机制111班姓名祖力阿牙提·努尔东学号113731145答辩时间2016年 5 月新疆农业大学机械交通学院目录1 绪论 (1)1.1研究的目的和意义 (1)1.1.1 国内花生生产现状 (2)1.1.2 国内花生的种植方式 (3)1.1.3 花生捡拾收获机械发现状 (4)1.2本题目研究目标与内容 (6)2花生捡拾装备的设计原理 (6)2.1设计依据 (7)2.2设计方案与分析 (7)2.3作业原理 (8)3 主要参数确定与关键部件设计 (9)3.1主要参数确定 (9)3.1.1 花生捡拾收获机的功率计算 (9)3.1.2 捡拾装置主要参数的确定 (10)3.1.3输送装置的主要参数确定 (12)3.1.4大带轮的主要参数确定 (13)3.1.5传动轴 (14)3.2总体装配 (17)4 结语 (17)参考文献 (18)致谢 (19)花生捡拾摘果装备的设计祖力阿牙提·努尔东指导老师:唐学鹏1. 绪论1.1 研究的目的和意义目前花生捡拾,摘果机械化程度低,收获率低,劳动强度大,生产成本高,等问题突出。
本文介绍了几种典型的花生收获机械,概述了国内外花生摘果机械的发展现状,总结了目前针对分段收获收获的花生建设装置的结果和优点,指出了花生机械化捡拾作业过程中存在的问题。
研制花生收获机械对花生产业的快速发展和农民增收有重要意义。
花生不仅是优质油料作物,而且是主要的蛋白资源,加工品类多,产业链条长,现已成我国重要的出口创汇产品和农业结构调整重点发展和扶持的种植品种。
在消费结构和出口结构不断调整和优化的双重拉动下,花生生产得到长足发展,并逐渐向主产区相对集中,优势产业带基本形成。
但是我国花生生产机械化发展却严重滞后,作业成本占生产总成本1/2的收获作业。
目前主要依靠人工完成,劳动强度大、作业成本高、效率低、损失大、成本高已成为生产发展与产业成长的主要瓶颈,我国对国内对花生机械化收获技术装备的需求日趋迫切。
果实采摘机器人快速柔顺夹持测试系统设计

J  ̄ / (C机 )下 位 机( 字信 号处 理 器 D P 、 2 0P I 、 数 S )夹持 结
构( 机器人 手指)力传 感器 、 、 驱动 电机 、 实形 变监测 摄 果
究 。刘 继 展 等 人设 计 的基 于多 传 感 器 信 息 融 合 的智
能 型番 茄 采 摘 机 器人 末 端 执 行 器 .手 指 夹持 机 构 可 对 番 茄 可 靠 抓 持 ,果 梗 切 断 装 置 利 用 激 光 对 果 梗 进 行 切 断 [。宋 健 等 人 利 用 4 自由 度 关 节 式 机 器 人 、 1 1 D MC运 动 控 制 器 、机 器 视 觉 系 统 以及 工 控 P C机 组 成 了采 摘机 器 人机 械本 体 及 开放式 试 验 系统 【J赵 庆 2。 , 3
定 的算 法 生成 P WM 信 号 , 动 电 机 , 带 动 有 力 驱 并
传 感 器 的 机器 人 手 指 运 动 ,实 现 手指 对 果 实 夹持 动
具 , 供 给 使 用 者 良好 的人 机 交 互 界 面 , 以 对 驱动 提 可 电机 、 控 摄 像 机 的 工作 模 式 进 行 设 定 I。人 机 交互 监 6 _ 界 面 主要 包 括 各 种 数据 信 息 显示 模 块 、用 户信 息输 入模 块 等 , 能 根据 系统 的测 试 要 求 , 供 更 多 的 功 并 提
魏 海 峰 , ,9 1 生 , 男 18 年 山东 宁 阳 人 , 士 , 苏 科 技 大学 电子 信 息 学 院 讲 师 ; 究 方 向为 机 电 系统 设 计 及 控 制 。 博 江 研
中国农 机化 动 机 , 术 指 标 如 下 : 大 转 速 10 0p 2 6线 码 技 最 0 0 rm,5 盘 , 定 电 压 2 V, 定 功 率 为 8 W。 当 手 指 夹 持 番 额 4 额 0
4HLZ-130型智能自走式花生联合收获机摘果机构的研制
4HLZ-130型智能自走式花生联合收获机摘果机构的研制作者:袁鹏飞韩静歌来源:《农业开发与装备》 2019年第3期摘要:通过分析4HLZ-130型智能花生联合收获机摘果机构的工作原理、结构特点和技术参数,确定影响花生联合收获机收获效果的主要因素,为机具性能改善奠定基础。
关键词:花生;联合收获机;摘果机构;清选机构1 前言花生是我国广泛种植的一种油料作物,也是我国种植历史悠久的经济作物。
传统的花生收获主要依靠人工和畜力完成,耗时耗力且效率低,严重影响花生生产的经济与社会效益。
近几年,随着花生种植面积的增加和农村劳动力的减少,花生的收获成本大幅提升,严重降低了农户的种植积极性。
目前我国花生收获机械正处于发展阶段,以分段收获为主,收获水平无论是与发达国家花生的机械收获相比还是与我国小麦、水稻和玉米等粮食作物相比均有很大差距,恰恰收获作业是花生整个生产过程中难度最大、花费最大的环节,也是目前花生机械化生产亟需解决的主要问题。
河南豪丰农业装备有限公司根据市场需求开发了4HLZ-130型智能花生联合收获机,主要由挖掘部件、输送部件、摘果部件、清选部件、集果部件等组成。
能一次完成挖掘、输送、摘果、集果的作业过程。
根据NY/T2204-2012《花生收获机械质量评价技术规范》的要求,摘净率、破损率、含杂率是衡量花生联合收获机性能的重要指标。
因此摘果部件是花生联合收获机的关键部件,直接影响花生收获机性能。
2 收获机的工作过程收获作业时,挖掘铲进入花生果下层,将花生果和秧秆全部铲起,利用抖动输送链将果秧与土分离,完成花生出土后的第一次清选。
清选后花生秧果被喂入到摘果室腔后,在滚筒的作用下高速旋转。
花生果在螺旋搅龙钉齿和凹板筛的打击梳理作用下从花生蔓上脱落,掉落在振动筛上。
清选机构由振动筛和风机组成,振动筛在平行四杆机构的作用下前后往复运动,将花生果和蔓叶分离;清选风机将蔓叶从尾部抛落地面,花生果滑落到下方的螺旋输送器内向一侧集中,在风力的作用下升运到集果箱内。
一种花生收获机智能测控系统[实用新型专利]
![一种花生收获机智能测控系统[实用新型专利]](https://img.taocdn.com/s3/m/85a6cdb5312b3169a551a45e.png)
专利名称:一种花生收获机智能测控系统
专利类型:实用新型专利
发明人:唐勇伟,赵晓杰,郝慧娟,郝凤琦,董振振,程广河,孙瑞瑞,王浩,张让勇,孔志刚
申请号:CN201920202272.8
申请日:20190215
公开号:CN209628103U
公开日:
20191115
专利内容由知识产权出版社提供
摘要:本实用新型的花生收获机智能测控系统,花生收获机由机架、动力机构、挖掘铲、花生捡拾器、传送装置、摘果装置、果草升运架、集草箱和集果箱组成,特征在于:花生收获机智能测控系统由数据采集系统、GPRS数据收发模块、声光报警电路、云服务器和控制中心组成,数据采集系统对挖掘深度、夹持链状态以及摘果马达、升运马达、滚筒、皮带转速进行测量;控制中实现花生收获机的监控,控制中心发出的报警信号和控制指令下发至数据采集系统。
本实用新型的花生收获机智能测控系统,并可在出现异常工况时发出声光报警,便于驾驶员做出处理,避免作业故障的发生,在保证花生收获效率的同时,避免了花生收获机的损坏,有益效果显著,适于应用推广。
申请人:山东省计算中心(国家超级计算济南中心)
地址:250014山东省济南市历下区科院路19号山东省计算中心
国籍:CN
代理机构:北京华际知识产权代理有限公司
代理人:褚庆森
更多信息请下载全文后查看。
花生摘果机设计_毕业设计 精品
花生摘果机设计目录摘要 (1)关键词 (1)1前言 (1)1.1研究的目的和意义 (1)1.2国内外花生摘果机械的发展现状 (2)1.3本设计主要研究内容和研究方法 (3)1.3.1研究内容 (3)1.3.2研究方法 (3)2花生摘果的主要方式及摘果滚筒类型......................... .. (3)2.1轴流式钉齿滚筒............................... . (4)2.2蓖梳式圆柱形轴流滚筒....................................... .52.3差动式摘果滚筒............................................ ..53.花生摘果机的结构设计 ...................................... (6)3.1基本要求................................................. (6)3.2总体结构.................................................. ..6 3.3工作原理.................................................. ..7 4摘果装置传动系统的设计...................................... ..8 4.1电动机的选择和传动参数的设计.............................. ..9 4.2各轴的计算.............................................. (10)4.2.1各轴的转速计算........................................ (10)4.2.2各轴输入功率计算 (10)4.2.3各轴输入转矩计算 (10)4.3V带传动的设计 (10)4.3.1电机与风机V带传动的设计计算 (11)4.3.2风机与滚筒V带传动的设计计算 (13)4.3.3滚筒与筛子V带传动的设计计算 (16)5主要部件设计 (19)5.1摘果滚筒设计计算 (19)5.1.1确定滚筒类型 (19)5.1.2滚筒的直径 (20)5.1.3滚筒的长度 (20)5.1.4滚筒的线速度V (21)5.2滚筒轴装置的设计 (21)5.2.1根据轴向定位的要求确定轴的各段直径和长度 (22)5.2.2求轴上的载荷 (22)5.2.3按弯扭合成应力校核轴的强度 (24)5.2.4轴承的校核 (25)5.2.5轴上键连接的选择及校核 (26)5.3轴承座、端盖的结构设计 (26)5.4滚筒钉齿的设计 (26)5.4.1滚筒钉齿的形状的选择 (26)5.4.2滚筒钉齿的排列 (27)5.5凹板筛的设计分析 (28)5.6风机的设计 (29)6结论 (29)参考文献 (31)致谢 (32)附录 (32)花生摘果机设计摘要:本文通过对我国花生生产现状,摘果方式的调查研究,研制出全喂入式花生摘果机,满足了现阶段花生产区的要求。
花生收获机智能工况测控系统设计

花生收获机智能工况测控系统设计赵艳华;龚丽农;于艳;李瑞川【摘要】针对花生收获机智能化的需求,介绍了一种花生收获机工况检测与控制系统的设计方案。
该系统对花生收获机工作状况进行监测与信息反馈,可在手动和自动两种工作模式下完成工作机构控制。
其主控制器采用力士乐控制器,通过CAN 总线与各工作机构检测部件通讯,根据当前的运行模式和运行状况做出控制决策,控制电液系统驱动的执行机构完成收获作业。
经田间试验验证,系统功能良好。
%To meet the need of peanut harvester intelligentization, a design scheme working-condition detecting and con-trolling system for peanut harvester is introduced in this paper. The system can monitor working condition of peanut har-vester and feedback the information through CAN bus. The system can work in both manual and automatic control mode to accomplish the harvest work. Rexroth controller is used as the main controller, which communicate with detection com-ponents in different parts through CAN bus. According to the current operation mode and operation condition, the con-troller makes decisions to control actuator which is driven by electro-hydraulic system to complete harvest task. System function is tested by field experiment and proved to be good.【期刊名称】《农机化研究》【年(卷),期】2017(039)004【总页数】5页(P217-220,225)【关键词】花生收获机;工况;监测;智能【作者】赵艳华;龚丽农;于艳;李瑞川【作者单位】青岛农业大学机电工程学院,山东青岛 266109;青岛农业大学机电工程学院,山东青岛 266109;青岛农业大学机电工程学院,山东青岛 266109;山东五征集团有限公司,山东日照 262306【正文语种】中文【中图分类】S225.7+3;S24我国花生机械收获的研究虽然起步较早,但目前应用普及率仍较低,主要原因在于目前收获机械的收获率低、破损率高、牵引动力要求高及不适应小型地块作业等。
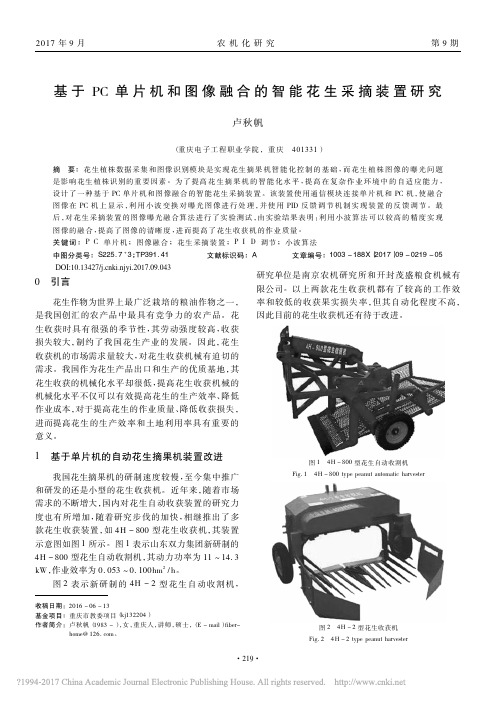
基于PC单片机和图像融合的智能花生采摘装置研究_卢秋帆
14. 3
图 2 表 示 新 研 制 的 4H - 2 型 花 生 自 动 收 割 机 ,
收稿日期: 2016 - 06 - 13 基金项目: 重庆市教委项目( kj132204 ) ( E - mail ) fiber作者简介: 卢秋帆( 1983 - ) , 女, 重庆人, 讲师, 硕士, home@ 126. com 。
系统总体运行流程图
The overall system operation flow chart
在进行传感器和 PC 机的串口通信时 , 需要设定 , VB 合适的串口通信波特率 在 软件中对可视化界面 进行编程 , 方便系统的运行 。 为了提 高 系 统 的 精 度 , 采用 PID 控 制 进 行 反 馈 调 节 , 当出现植株图像曝光 还需要 采 用 曝 光 图 像 的 融 合 算 法 对 图 像 进 行 处 时, 理, 本研究采用小波算法 。
图2 Fig. 2
4H - 2 型花生收获机 4H - 2 type peanut harvester
· 219·
2017 年 9 月
农 机 化 研 究
第9 期
为了提高花生收获装置的智能化和自动化水平 , 采用单片机和 PID 算法对装置进行了改进 , 其总体框 架如图 3 所示 。 其基本流程 : 首先利用传感器对花生 植株信号进行采集 , 然后对信号进行转换 , 由 PC 机对 图像进行识别 , 并与 PC 机建立通信 ; 在 PC 机上使用 VB 软件进行编程设计 , 建立可视化界面 , 具体流程如 图 4 所示 。
2
dα < ɕ
为了实现花生植株曝光图像的融合 , 需要对图像 进行多分辨率分析 , 通过多分辨率分析之后 , 可以将 细节保留 , 将曝光无用的信息滤除 。 多分辨率可以将 一组图像进行融合 , 并通过小波变换来实现嵌套子空 间的多分辨率分析 , 其嵌套的多分辨率子空间如图 5 所示 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
数字化花生摘果测力系统研制凌轩,刘江涛,王旭东(仲恺农业工程学院机电工程学院,广州510225)摘要:花生摘果测力试验台是研制花生联合收获机的重要测试装置,其性能的好坏直接关系到花生联合收获机的摘果率、破碎率及生产效率等指标。
为此,针对传统模拟测力系统抗干扰能力弱及只能人工读数等问题,开发出一种便携分体式数字化测力系统。
通过试验建立了花生植株生长日期与各试验指标之间的数学模型,进行了鲜湿花生摘果测力试验。
结果表明,所研制的数字化花生测力系统试验台具有精度好、自动化程度高、抗干扰能力强及价格低廉等特点,可满足对鲜湿花生果进行摘果受力测试要求。
关键词:花生联合收获机;花生摘果;数字化测力系统中图分类号:S225.7+3文献标识码:A文章编号:1003-188X(2015)04-0095-040引言花生是世界五大油料作物之一,既是重要的经济作物,也是营养价值很高的蛋白植物,在世界农业生产中占有重要地位[1]。
我国花生种植面积占世界花生种植总面积的20%以上,仅次于印度;产量居世界首位,占世界总产量的35%以上。
目前,除了西藏自治区之外,我国其他各个省区都有花生种植,尤以山东、河南、广东等省区更为集中[2]。
随着农业科技的发展,花生向良种化、机械化和区域化种植方向发展。
此外,我国花生产区基本上属于高产区,是世界平均产量的2 3倍,处于世界前列。
因此,目前花生已成为我国最具国际竞争力的优质油料作物和农业结构调整与产业重点扶持的重要内容[3]。
花生摘果装置是花生联合收获机的重要组成部分,其性能的好坏直接关系到花生联合收获机的摘果率、破碎率及生产效率等指标。
花生收获机需要对挖掘后的花生植株进行即时摘果,花生果承受撞击能力较弱,如果摘果机摘果滚筒转速过快,与花生果的撞击强度变大,花生果就会破裂或被撞断[4-5]。
因此,需要对鲜湿的花生果进行摘果受力试验,从而为花生收获机摘果装置设计参数的确定提供依据[6-8]。
目前,绝大多数的力传感器的输出属于模拟量输出,普遍通过电流或电压形式与控制系统的外围电路收稿日期:2014-04-30基金项目:广东省农业厅农业机械化科研项目(2012B020313005)作者简介:凌轩(1974-),男,南宁人,博士,(E-mail)mysoar@ 163.com。
通讯作者:刘江涛(1975-),男,甘肃陇西人,讲师。
发生联系,采用显示模拟变送器显示测得的受力数值,不能进行自动测量及后续存储分析等。
与模拟传感器相比,数字化传感器传输的数字信号抗干扰能力强,且数字信号可以通过计算机进行处理,大大简化了模拟传感器温度补偿、零点补偿及非线性补偿等工艺;但现有的高精度数字化测力装置多为进口,价格比较昂贵。
本文拟从项目实际出发,设计一种精度较高、价格低廉、基于便携笔记本控制器的分体式数字化测力系统来代替传统的模拟数显式测力装置。
1测力系统设计花生摘果测力系统由硬件和软件组成。
硬件部分主要提供测量花生摘果所需力的平台,即将所要测量的力的大小通过应变—电阻—电压等载体形式,把测得的离散电压转成数字信号,以便便携电脑进行信号的软件处理。
软件部分主要完成对测量到的电压信号进行标定、存储、显示等功能,使用户能够清晰、直观地看到被测试件所受的力的变化规律,进而可以对测量的力进行分析、处理等。
本课题的硬件系统主要由便携电脑控制系统、摘果测力夹持机构、测力传感器、AD转串口采集板卡及电源系统等组成,如图1所示。
1.1摘果测力装置控制系统数字化摘果测力系统要求在田间进行测试,并具有自动测量、自动显示、自动数据存储和处理等功能。
基于以上要求,本文选取便携式笔记本电脑作为测力装置的控制器。
1.2测力传感器选择由于花生摘果测力既有拉力又有压力,测力传感DOI:10.13427/ki.njyi.2015.04.022器选取了MEACON 公司的S 型称重传感器。
它采用S 型梁结构,拉、压均可使用,最大量程为20kg ,输出为电压,灵敏度为(2.0ʃ0.05)mV /V ,非线性≤ʃ0.03%F ·S ,具有测量精度高、稳定性好、输出对称性好等优点。
1.花生果蔓2.摘果测力夹持机构3.力传感器4.AD 转串口采集卡5.便携电脑图1花生摘果测力试验装置Fig.1The force measuring device of peanut picking1.3AD 转串口采集卡选型由于本系统控制器采用便携笔记本,而前述测力传感器输出测力信号为电压,必须要通过数字信号采集把模拟信号变为笔记本适用的数字信号形式。
本项目选用了WE -ADM121称重AD 模块,AD 转换速率为10Hz ,RS -485接口,波特率、校验位可设置,具有数字滤波、抗干扰、防抖动等功能。
2软件编写及调试摘果测力软件采用面向对象语言VC 及Windriver编写,用VC 编程语言完成用户界面及功能函数的编程,用Windriver 开发工具开发出的驱动程序完成用户软件、计算机和数据采集卡之间数据的交换,使得数据采集卡能够按照用户的要求工作。
其主要由力传感器标定模块、数据采集模块、测力试验模块及监控模块等组成,可以实时采集处理/显示、生成报表和曲线,保存试验数据及监控试验等。
花生摘果测力试验界面如图2如示。
图2花生摘果测力试验界面Fig.2The force test interface of peanut picking2.1数据采集和处理模块数据采集系统的功能包括采集卡的初始化(采集点数和采集频率等)、数据显示及数据处理(数字滤波、数值计算、剔除异常值加工处理等)。
2.1.1采样频率的选择计算机控制本质上是一种采样控制,系统的输入输出信号都是离散信号。
在设计离散系统时,要从采样信号中不失真地复现原连续信号,必须对采样间隔有一定的要求,即当采样周期必须严格遵守香农采样定理。
即采样频率ωs ≥2ωh 时,输入信号可以完满地从采样信号中恢复过来。
考虑到力传感器的频率比较低,设计控制系统时采样周期选为0.1s 。
2.1.2数据采集程序力传感器是摘果测力系统的重要元件,主要通过WE -ADM121称重AD 模块把力模拟量转成数字量输出。
本文使用Visual C ++开发Windows 环境下的RS232串行口通信程序来实现笔记本与测力传感器的通信,通信方式利用OCR控件。
设置步骤包括:①对串口进行初始化,设置MSComm 控件的属性;②添加串口事件的消息处理函数OnComm 函数,在函数中根据应用需要编写数据处理代码;③编写串口发送等其它代码;④关闭串口。
便携电脑从力传感器一次接受15个字节整数,包括保留校验和测出力数值等信息。
输出为16机制整数,正数用原码表示,负数用补码表示。
设FHigh 为力数值高字节,FLow 为力数值低字节,则有:if (FHigh &0F80)//如果力传感器高字节为1,则为受压,否则受拉。
{targetF =FHigh*256+FLow ;//高字节左移8位后和低字节相加targetF =( targetF )+1;//补码取反后加1targetF =(targetF &0F0000ffff );//取力传感器发送串口16字节}elsetargetF =FHigh*256+FLow ;Fanger =(targetF -129)*1.1739*0.001;}//力传感器标定2.1.3异常值剔除和特性曲线的拟合力传感器在受到震动或外界因素的干扰时会导致异常数据的出现,本处理目的是剔除有明显错误的数据。
设给定一个误差限δw ,在t 时刻的采样值为y t ,预测值为y 't ,则当y 't -y t ≥δw 时就认为采样值y t为异常数值予以剔除。
本文采用最小二乘法对曲线进行拟合。
2.2驱动程序的设计本数据采集系统利用Windriver开发工具开发驱动程序。
首先利用开发向导生成驱动程序框架,然后添加自己的驱动函数,如定时器函数及中断处理函数等。
定时器函数用来给各通道设置定时常数,为数据采集箱定时;中断处理函数是中断请求发生后调用数据采集的函数,将采集到的数据保存到链表中。
2.3数据存储与显示本文数据采集系统的数据存储采用链表结构实现,具有节约系统资源、动态分配内存及处理数据方便等特点。
显示采用MFC文档视图模式,可以同时显示测出的拉压力值及趋势曲线。
3花生摘果测力试验花生果在联合收获时摘果力的大小是影响摘果完整性及破碎率的主要原因之一。
本试验目的在于测量不同含水率的鲜湿花生蔓苗在相对静止状态时摘取及引起花生果实破碎所需力的大小,分析花生果在联合收获时摘果力及引起破碎的原因。
3.1试验基本条件试验材料选取广州市周边地区优良花生品种,最具代表性的花生粤油7号,其具有优质、高产、兼抗、专用等多方面优良特性。
试验地点选择广州花都的花生试验田,试验选用5个小区块进行采集试验,取试验平均值并做记录。
本试验试样要求为刚刚采摘后的鲜花生果,无明显缺陷及表皮损伤,带泥土采集,选取生长良好、根茎叶俱全的花生,尽量保持花生果实鲜湿。
具体采集方法遵照中华人民共和国农业行业标准—花生收获机作业质量标准[NY/T502-2006]的要求,并进行土壤硬度与湿度的测定。
花生果蔓测试样本选择方法为:随机摘得鲜湿花生果样本,每次取花生果蔓3份,每份不少于50g;在常温下放置隔天进行摘果试验,每次做3组试验,每次试验测量值取平均值,本文测试试验共做7次。
3.2试验结果3.2.1最小摘果力与收获期在收获日到收获日后12天一段时间内,花生最小摘果力随日期变化回归分析的关系曲线如图3所示。
由试验结果可以看出:刚采摘的鲜湿花生所需的摘果力约为0.3 0.5kg,测量值可精确到0.0001kg,每组测量出的平均摘果力有微小差异是由于随机采摘的花生果苗的发育不同导致的。
同时,花生最小摘果力随着采摘时间的延长而增大。
这是因为花生果未成熟时含水量较高,从果蔓摘取花生果时所需的力较少;随着成熟度的提高,含水量逐渐减少,花生果蔓的韧性也逐渐加大,所以摘取花生所需的力也越大。
由试验求得其平均最小临界摘果力随时间变换回归函数为y=0.6271+0.0889x-0.0083x2+0.004x3由图3的试验趋势曲线可以看出:前3天期间内,摘取花生果所需的力较小,但期间所需的摘果力变化比较剧烈,曲线也较陡;在花生收获日后3天期间内,花生水分蒸发较快,韧性增大,所需的摘果力也变大,但增大趋势趋于平稳,曲线也比较平缓。
图3花生最小摘果力与收获时间的关系Fig.3The relationship between minimum peanut picking force andharvest time3.2.2挤裂破碎力与收获期花生果在联合收获时摘果离心力的大小会影响摘果完整性,甚至会引起鲜果破碎。