面向芯片封装的高速精密定位平台控制系统设计
清华大学微电子系工硕课题介绍
课题介绍微电子与纳电子学系2013级工程硕士双选专用清华大学微电子与纳电子学系2013年12月有招生需求导师名单-------------------------------------------------------白国强(设计室)蔡坚、王谦(器件室)陈虹(设计室)陈炜(器件室)池保勇(设计室)邓宁(器件室)方华军(器件室)付军(集成室)姜汉钧(设计室)李福乐(设计室)李树国(设计室)李翔宇(设计室)李宇根(设计室)李兆麟(信研院)梁仁荣(集成室)刘雷波(CAD室)刘振宇(信研院)麦宋平(深研院)潘立阳(集成室)钱鹤(CAD室)任天令、杨轶(器件室)王敬(集成室)王晓红(器件室)王燕(CAD室)王喆垚(器件室)王志华、王自强(设计室)魏少军(CAD室)乌力吉(设计室)吴华强(工艺平台)伍冬(集成室)伍晓明(工艺平台)谢丹(器件室)谢翔(设计室)许军(集成室)叶佐昌(CAD室)尹首一(CAD室)岳瑞峰(器件室)张春(设计室)张进宇(CAD室)张雷(CAD室)刘泽文(器件室)何虎(设计室)北京朗波芯微技术有限公司课题介绍白国强一、招生老师联系信息E-mail: baigq@电话:62794391(O),136********办公室:主楼9区104二、招生人数:2-3名三、课题介绍课题一:(1)课题名称:面向低资源移动终端应用的新型公钥密码算法的集成电路实现技术研究。
(2)课题来源:国家自然科学基金重点项目“面向低资源移动终端的高效新型公钥密码芯片的理论与关键技术研究”。
(3)课题简介:受移动终端(如手机)硬件资源十分有限的限制,现有公钥密码算法,包括RSA算法和ECC算法很难直接应用于移动终端。
为解决这一问题,近年来多变量公钥密码学受到广泛关注,成为研究热点之一。
本课题研究内容是“面向低资源移动终端的高效新型公钥密码芯片的理论与关键技术研究”项目中的一部分内容,将以集成电路方式设计、实现基于多变量的新型公钥密码芯片。
高精度磁浮式定位平台控制问题研究

高精度磁浮式定位平台控制问题研究张和洪;龙志强【摘要】High-precision stage is the key component in the scene of micro-technology including photoetching machine , nano-measurement , process and micro-assemble , etc . Magnetic levitation positioning becomes thehot topic in positioning technology due to using non-contact maglev technology in motion stage and driving part , which can eliminate friction and attrition to motion and improve the precision . The development and researches of magnetic positioning stage in China and abroad are introduced and a new structure of magnetic levitation positioning stage is presented . Considering the uncertainty of the model and gap and load disturbance ,active disturbance rejection control is proposed to maglev positioning stage for the problem of stable levitation control based on the single magnet model .The simulation and experiments show that the method meets the demands of high-precision and stable levitation control and has the strong ability of robust anti-disturbance .%高精度定位平台是光刻机、纳米测量与加工、微装配等微观领域技术的核心部件。
全自动高速固晶机中视觉定位系统设计

备 ,主要用来 进行 L D生产过程 中的管 芯和引线框架粘结 , E 同 到指定位置通过银胶 和基体粘结 , 完成一个工作周期 。 通常 固晶
时也可 以用于 P B 小 型 D P S P等产品的生产『 近年来 随着 机要 求 的定 位 精 度 至 少 为 0 5 m,加 工 晶 片 尺 寸 最 小 为 C 、 I ,O 】 】 , . m 0 相关技术和产业 的发展日 固晶机朝着高 速高精度方 向发展 , , 高 02 mm 0 5 m, .5 x . m 图像识别周期不大于 lO 。 2 O ms 根据其工作原理 设计 了固晶机的视觉定位 系统 , 如图 速 固晶机 的加工能力可 以达到 10 0片,、 3 00 / 时[ J 1 。国外在这类设 以及固晶的基本 指标 要求, 备上面发展得 已比较成熟 , 占据市场 的主导地位 , 国内也积极开 1 示 。 所 展 了相关研究 『46对 固晶机 的并 联焊头结构 等机械结构部分 l,1 ,5, 3, , 和系统控制技 术 、 视觉检测 技术进行了研究并取得 了一定成果 。 总体来说 ,对 固晶机特别是其视觉定位系统的研究 还没 有引起 足够的重 视 , 鉴于这种情况 , 对全 自动高速 固晶机的视觉定位 系 统进行了研究 。
} 来稿 日期 : 0 — 9 1 } 2 70 — 9 基金项 目: 0 国家科技支撵计划资助项 目( 0 6 A O A 7 20B F2 0 )
维普资讯
一
5 8一
吴 小锋 等 : 自动 高速 固晶机 中视 觉定位 系统设 计 全
第 6期
该 系 统 运 行 在 Wid w P平 台 下 ,采 用 T业 P + 动 控 l n os X C运 mm~ m 4 4 mx mm) , 镜头 的像方视场要 求大于或等于相机芯 片规
NMEA-0183GPS定位信息显示系统方案设计

中文摘要GPS定位系统在人们的日常生活中已被广泛使用,已然成为人们生活中的重要组成部分。
因其具有定位精度高、价格低廉、适用性强等特点,在许多领域都占有主导地位。
本次设计将介绍一种简易GPS卫星定位显示系统,GPS模块采用ublox 公司旗下的NEO-6M模块,同时主控MCU采用51单片机STC89C52,显示屏幕采用常见的LCD-12864液晶屏,通过对单片机串口接收到的GPS数据包进行解析并显示在12864液晶上,实现实时地理位置信息的采集与显示。
同时采用电池供电以实现体积小巧、携带方便。
关键词:GPS定位;STC89C52 NEO-6M;LCD-12864;第一章绪论1.1 课题背景及意义GPS全球卫星导航系统在军事,商用,民用上都具有广阔的领域,现在应用GPS 的产品已经随处可见,比如常见的汽车导航仪,GPS测距测亩仪,GPS定位追踪搜救系统等等,虽然这些功能都比较强大,但差不多都是应用在特定的领域,结合其他的功能模块一起设计使用的,而且仪器价格高,而且对于需要简单定位功能来说没有必要那么复杂。
所以在这种情况下,本次设计的定位显示系统满基本的GPS的定位系统的需求。
1.2 课题研究的目标和任务本次设计的主要任务是通过单片机与GPS模块进行通信,解析出NEMA-0183语句并提取需要的经纬度、时间日期在12864液晶上进行显示。
在此次设计过程中,主要熟悉所选用的GPS接收模块的性能指标,接收并解析它所输出的数据包,用C语言编写相关单片机控制和解析程序,并在液晶显示器成功的显示相关的信息。
第二章 GPS定位信息显示系统方案设计2.1 全球GPS卫星导航系统系统简介GPS卫星到现在为止已经设计了三代,第一代为实验卫星,一共发射了11颗卫星,设计的寿命是5年,现在已经停止工作了。
第二代称之为工作卫星,一共发射了28颗,寿命是7.5年,从1989年开始发射到1994年上半年发射完成。
第三代卫星尚在设计中计划20颗,用来取代第二代提高并改善卫星定位系统。
高速宏微运动平台及精密定位方法

十微米血9〕。将PZT与多种大行程运动设备或机构 相结合形成宏微复合的运动方式 ,研究宏微复合的 快速定位方法,可以突破运动行程的限制,同时实现 快速高精度定位[1°-12]o
研究内容从以下几方面展开,首先,开展了利用 PZT和音圈电动机(VCM)组合的新型结构研究;并 利用动力学仿真对系统进行分析 ,确定最终的结构 方案;建立双PID切换控制方法;最后,通过实验平 台的搭建与控制软件系统的开发,验证运动平台的 定位性能。
*国家自然科学基金项0 (51675106,U1601202);广东高校建设重大科研项目(17ZK0091)
刻出滋*訂诚?
・117・
Keywords: macro micro composite stage; voice coil motor; piezoelectric ceramic; dual PID control; dynamic
近年来,在几百毫米的大范围内实现亚微米精 度,已经成为精密工程、光电、信息与半导体制造领 域的主要目标⑷。随着集成电路(IC)制造、微型机 械电子系统(MEMS)、精密测量系统等领域的快速发 展,对高速、高加速、大行程的精密定位平台的需求 变得更加迫切⑵。压电陶瓷(PZT)材料由于具有输 出精度高、响应速度快、电能与机械能转换效率高、 尺寸小、热膨胀小的特点,被广泛应用于宏微复合精 密定位领域卩£。通过PZT的应用可以实现纳米级 的高精度定位,但其位移行程是有限的,往往只有几
of Ministry of Education,Guangdong University of Technology,Guangzhou 510006,CHN)
Abstract: Around the high performance requirements of microelectronic precision manufacturing package equipment and on the basis of macro and micro positioning technology, a new type of macro micro composite preci sion positioning stage and its precise positioning method are proposed. Firstly, using the ADAMS/view to simulation the dynamic of the stage, and confirm the spring stiffiiess and the preload influence on the performance of the system. Then a PID switching of macro micro composite motion control method was proposed to realize the development of the stage's control system. The macro micro composite positioning stage has been built. And the positioning performance experiment was carried out. The experimental re sults show that the stage has fast and high precision and large stroke positioning performance ・ The results show that under the condition of 20 mm operation speed of 0.25 m/s and acceleration of 5 g, the stage can achieve 40 nm precision positioning accuracy, and the stability time is less than 105 ms.
天津大学下属的研究所

制造装备与系统研究所方向一:并联构型装备(Parallel Kinematic Machines)是以并联机构为全部或部分进给机构的机器人或机床系统。
设计理论与关键技术在并联机构的拓扑结构创新设计,运动学分析与尺度综合,精度设计与运动学标定,静、动态刚度分析与动态设计,轨迹规划,开放式数控系统开发以及装备的可重构布局设计等方面做了大量研究工作,取得一批理论成果。
样机建造与产业化Stewart型并联机床受到国家863高技术发展计划和国家自然科学基金资助,与清华大学合作,于1997年在国内率先开展Stewart 型并联机床设计理论、关键技术和原型样机建造工作,内容涉及工作空间分析与综合等方面,为原型样机的设计提供了理论依据。
该项目通过国家教育部鉴定,发表高水平论文多篇,1999年获中国高校科技进步2等奖。
三平动自由度并联机床3-HSS并联机床是在天津市科技攻关和天津大学211工程项目资助下研制成功的我国首台商品化三坐标并联机床,该机床采用平行四边形原理,具有刚度和精度高等特点。
该项目后得到天津市重大科技攻关项目支持,开发基于主模块的5坐标加工中心,目前已开发出立式和卧式两种机型并出售2台。
球面并联机构三自由度球面并联机构是在国家“863”计划资助下研制成功的新型数控装置,能够实现绕三个正交轴的转动,可作成各种高速跟踪装置。
高速轻型并联机械手Diamond机构是国家“863”计划资助下,由天津大学发明的2平动自由度并联机构,是国际著名Delta并联机械手的一种2维形式,具有速度高、制造成本低等优点,特别适合在完成电子、轻工、食品和医药行业中的高速抓取操作,目前已出售4台,并在电池制造企业得到应用。
5坐标可重构混联机械手TriVariant 机械手是在国家自然基金资助下,由天津大学发明的5坐标混联机械手,其结构突破了国际著名的Tricept 机械手的知识产权,具有速度高、结构简单、操作空间体积比大、可重构性强等优点,可广泛应用于汽车、航空、建筑等行业的焊接、切割、喷涂、高速加工和装配等操作。
面向芯片封装高加速度高精度气浮定位平台的有限元分析

so lcr s teaa s e e a l adm e terq i m ns t s nn . hw t o t n h n l i a lbe n th ure t h d i ig e h to e o f ysr r i e e e f oee g
Ke r s I p c a i g; rb a i g s e F m t me a a y t y wo d : C a k g r Ai e r n  ̄g ; i ede  ̄ n l ss i
中图分类号 :P 9 . 0 4 . 文献标识码 : T 31 ,21 2 9 8 A
【 要】 摘 为满足下一代芯片封装设备对定位平台的要求, 综合考虑串并联机构的优缺点及直线电机 直接驱动的优势, 并消除摩擦力的影响, 设计了由直线电机直接驱动的广义并联气浮定位平 台。 利用有限
元分析软件 A S S N Y 对平台进行静力学和动力学分析, 使结构满足刚度要求的同时, 移动部件的质量最 小。实验结果表明, 仿真结果可靠, 平台刚度达到 了 设计要求。
f rI p c a i g o C a k g n
L n tn , a g L a —u I Yu — a g XU Ch n , IXio l
(colf ehncl de c i nier gC ia iag nvri , nghu30 1 ,hn ) Shoo m cai l tc egnei ,hn l i sy Ha zo 10 8C ia aa n e ra l n Ji U e t n
北斗高精度定位系统设计及其差分定位精度分析
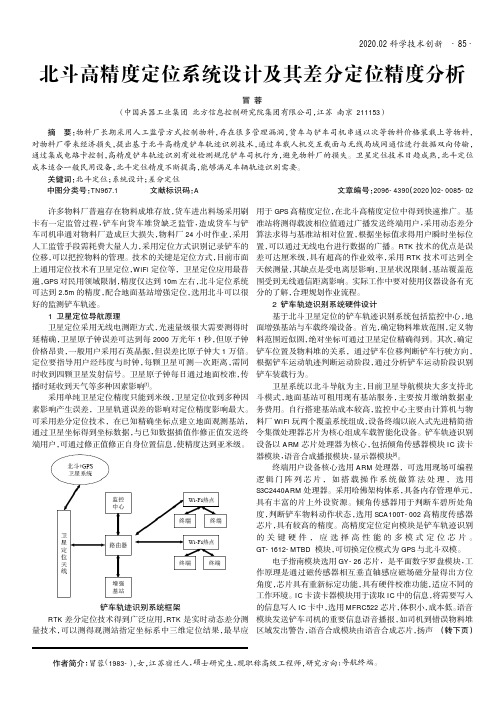
2020.02科学技术创新许多物料厂普遍存在物料成堆存放,货车进出料场采用刷卡有一定监管过程,铲车向货车堆货缺乏监管,造成货车与铲车司机串通对物料厂造成巨大损失,物料厂24小时作业,采用人工监管手段需耗费大量人力,采用定位方式识别记录铲车的位移,可以把控物料的管理。
技术的关键是定位方式,目前市面上通用定位技术有卫星定位,WiFi 定位等,卫星定位应用最普遍,GPS 对民用领域限制,精度仅达到10m 左右,北斗定位系统可达到2.5m 的精度,配合地面基站增强定位,选用北斗可以很好的监测铲车轨迹。
1卫星定位导航原理卫星定位采用无线电测距方式,光速量级很大需要测得时延精确,卫星原子钟误差可达到每2000万光年1秒,但原子钟价格昂贵,一般用户采用石英晶振,但误差比原子钟大1万倍。
定位要指导用户经纬度与时钟,每颗卫星可测一次距离,需同时收到四颗卫星发射信号。
卫星原子钟每日通过地面校准,传播时延收到天气等多种因素影响[1]。
采用单纯卫星定位精度只能到米级,卫星定位收到多种因素影响产生误差,卫星轨道误差的影响对定位精度影响最大。
可采用差分定位技术,在已知精确坐标点建立地面观测基站,通过卫星坐标得到坐标数据,与已知数据插值作修正值发送终端用户,可通过修正值修正自身位置信息,使精度达到亚米级。
铲车轨迹识别系统框架RTK 差分定位技术得到广泛应用,RTK 是实时动态差分测量技术,可以测得观测站指定坐标系中三维定位结果,最早应用于GPS 高精度定位,在北斗高精度定位中得到快速推广。
基准站将测得载波相位值通过广播发送终端用户,采用动态差分算法求得与基准站相对位置,根据坐标值求得用户瞬时坐标位置,可以通过无线电台进行数据的广播。
RTK 技术的优点是误差可达厘米级,具有超高的作业效率,采用RTK 技术可达到全天候测量,其缺点是受电离层影响,卫星状况限制,基站覆盖范围受到无线通信距离影响。
实际工作中要对使用仪器设备有充分的了解,合理规划作业流程。
高精度北斗导航定位系统设计与实现
高精度北斗导航定位系统设计与实现导语:随着卫星导航技术的快速发展,全球定位系统(GPS)在生活中的应用越来越广泛。
而作为我国自主研发的全球卫星导航系统,北斗导航系统在提供导航定位服务方面具备独特的优势。
为了满足用户对于高精度定位需求,高精度北斗导航定位系统的设计与实现成为一个重要的研究方向。
本文将介绍高精度北斗导航定位系统的设计原理与实现方法。
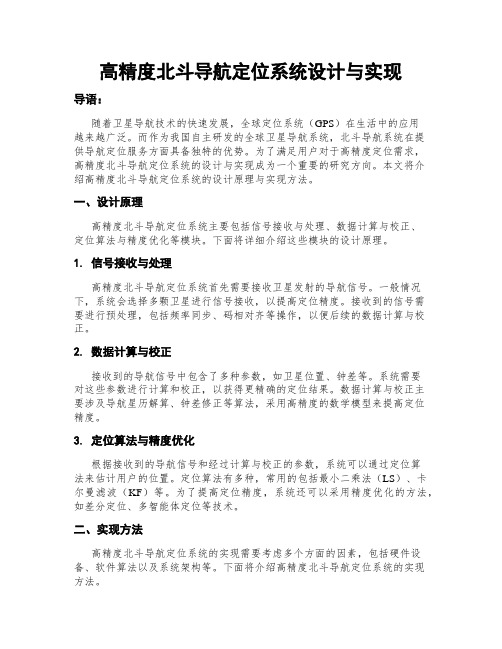
一、设计原理高精度北斗导航定位系统主要包括信号接收与处理、数据计算与校正、定位算法与精度优化等模块。
下面将详细介绍这些模块的设计原理。
1. 信号接收与处理高精度北斗导航定位系统首先需要接收卫星发射的导航信号。
一般情况下,系统会选择多颗卫星进行信号接收,以提高定位精度。
接收到的信号需要进行预处理,包括频率同步、码相对齐等操作,以便后续的数据计算与校正。
2. 数据计算与校正接收到的导航信号中包含了多种参数,如卫星位置、钟差等。
系统需要对这些参数进行计算和校正,以获得更精确的定位结果。
数据计算与校正主要涉及导航星历解算、钟差修正等算法,采用高精度的数学模型来提高定位精度。
3. 定位算法与精度优化根据接收到的导航信号和经过计算与校正的参数,系统可以通过定位算法来估计用户的位置。
定位算法有多种,常用的包括最小二乘法(LS)、卡尔曼滤波(KF)等。
为了提高定位精度,系统还可以采用精度优化的方法,如差分定位、多智能体定位等技术。
二、实现方法高精度北斗导航定位系统的实现需要考虑多个方面的因素,包括硬件设备、软件算法以及系统架构等。
下面将介绍高精度北斗导航定位系统的实现方法。
1. 硬件设备高精度北斗导航定位系统的硬件设备包括天线、接收机、信号处理器等。
天线用于接收导航信号,接收机负责信号的放大和处理,信号处理器用于对信号进行解调和解码。
为了提高定位精度,硬件设备要具备高灵敏度和低噪声的特点。
2. 软件算法高精度北斗导航定位系统的软件算法是实现高精度定位的关键。
根据设计原理中提到的信号接收与处理、数据计算与校正、定位算法与精度优化等模块,可以选择合适的算法来实现系统功能。
PID控制的BGA自动定位装置系统设计

0 引言
随着科技产 品功能 的 日趋 强大 , I C封装 的接脚数
越来越多 , 小 I 缩 C尺 寸 的要 求 变 得 更 为 迫 切 , 自动 化
1 基 于 P C 的步进 电机传 动 系统 L
步进 电机是一种将 电脉冲转化为角位移 的执行机 构, 它可直接用数字信号控制 , 无需反馈 , 可开环工作 , 无累积定位误差 , 控制精度高 , 被广泛应用于数字控制
果, 使生 产效率 得到 了提高 。 关 键词 :智能 PD 球 栅 阵列 I
中图分类 号 :T 2 5 P 1
P C 图像 检测 L
精密 定位
结b t a t Ai n tte ds d a tg so r dt n lI a k gn e h oo y, e g sr c : mig a h ia v na e fta io a C p c a ig tc n lg i . .-p o lg me ta c rc o rain n c u a y,lw p r t n e iin y a d o o e ai f ce c n o
ag rtm n P C o to oc n tu tte ta s sins se .Th o o io fte sse i r sa c e n h tu t r ft e p n il lo i h i L c nrlt o sr c h rn miso y tm e c mp st n o h ytm s e e rh dl d t e sr cue o r cp e i a h i p ooy e i d sg e rttp s e in d;tu e ac i cue b sd o GA ma e d tcin a r cs l n n y tm spo o e .Th e uto x e me t h st r ht t r ae n B h e i g ee t ndp e ieai me ts se i rp s d o g er sl fe p r i ns v rf ste c re t s n e sblt ft es se ,a l a h p rt n lefcso e BGA uo t o ao nprcia p l ain o ei e h orcnesa d fa ii yo y tm i i h swel steo e ai a f t ft o e h a tmai lc tri a tc a pi t sfr c l c o e ha cn rd cie e ce c n n ig p o u t f in y. v i
高精度GPS定位系统设计与研究

高精度GPS定位系统设计与研究摘要:GPS(Global Positioning System)定位技术是一种现代化的全球卫星导航系统,它在交通、军事、地质勘探以及民用领域中有着广泛的应用。
然而,传统的GPS定位系统在精度方面存在一定的限制,因此对于高精度GPS定位系统的设计与研究具有重要意义。
本文通过分析目前广泛应用的高精度GPS定位系统技术,探讨了其原理、构架和关键技术,并对其性能进行了评估和改进。
同时,本文还对未来高精度GPS定位系统的发展趋势进行了展望。
关键词:GPS定位系统、高精度、原理、构架、关键技术、性能评估、发展趋势1. 引言GPS定位系统是一种基于卫星导航的定位技术,通过接收来自卫星的信号来计算接收器的位置。
随着现代科技的不断发展,GPS定位系统的精度也不断提高。
然而,在某些领域,如精密农业、自动驾驶、航空航天等,传统的GPS定位系统精度存在一定的不足。
因此,设计与研究高精度的GPS定位系统成为了现实需求。
2. 高精度GPS定位系统的原理高精度GPS定位系统的原理基本上与传统GPS定位系统相似,但在信号处理、数据融合和算法改进方面进行了优化。
高精度GPS定位系统通过接收来自多颗卫星的信号,并利用测量学方法来计算接收器的位置信息。
具体来说,高精度GPS定位系统通过解算卫星发射信号与接收器接收信号之间的距离差,利用多个卫星的信号进行三角定位,以提高定位的精度。
3. 高精度GPS定位系统的构架高精度GPS定位系统的构架包括接收机、卫星、用户终端和数据处理设备。
接收机负责接收卫星信号,并对信号进行处理和解算。
卫星通过发送信号来提供定位信息。
用户终端接收接收机解算得到的定位信息,并将其用于实际应用。
数据处理设备负责对接收到的卫星信号进行处理和计算,以提高GPS定位的精度。
4. 高精度GPS定位系统的关键技术4.1 多频率信号处理技术传统的GPS定位系统只使用单频GPS信号进行定位。
而高精度GPS定位系统则采用多频GPS信号,通过分析不同频率信号的差异来提高定位的精度。
高精密伺服转台控制系统的设计

ISSN 100020054CN 1122223 N 清华大学学报(自然科学版)J T singhua U niv (Sci &Tech ),2004年第44卷第8期2004,V o l .44,N o .813 37105421056高精密伺服转台控制系统的设计黄令龙, 郭阳宽, 蒋培军, 李 晟, 李庆祥, 陈张玮(清华大学精密仪器与机械学系,北京100084)收稿日期:2003210227作者简介:黄令龙(19782),男(汉),四川,硕士研究生。
通讯联系人:李庆祥,教授,博士生导师,E 2m ail :liqx @p i m .tsinghua .edu .cn摘 要:该文设计并研制了高精密伺服转台的控制系统。
该控制系统采用圆光栅作为转台位移检测工具,采用了数字位置环和模拟电流环共同组成双闭环随动系统,其中位置控制器是带有速度前馈和加速度前馈的数字P I D 伺服滤波器。
实验结果表明,该转台运行1.148h 过程中位置伺服精度在±1″范围内,控制系统速度阶跃响应时间小于50m s ;运动稳定,速度变化范围小于±10%,满足高精密伺服转台位置伺服的精度要求。
关键词:导航系统;高精密伺服转台;前馈控制;圆光栅中图分类号:V 249.32文献标识码:A文章编号:100020054(2004)0821054203Con trol system for h igh -prec isionturn tableH UANG L ing long ,GUO Ya ngkua n ,J I A NG Pe ijun ,L I S he ng ,L IQ ingxia ng ,CHEN Zha ngw e i(D epart men t of Prec ision I n stru men ts and M echanology ,Tsi nghua Un iversity ,Be ij i ng 100084,Chi na )Abstract :H igh 2p recisi on servo turn tables are w idely used in inertial navigati on system s,w here their p recisi on m ainly depends on the contro l system.T h is paper describes a contro l system developed fo r a set of h igh 2p recisi on servo turn tables .T he system has a double clo sed 2loop contro l system w ith a digital po siti oning loop and an analog current loop.A circular grating is used fo r accuratepo siti oning .T he digital singnal p rocesso r (D SP )based po siti oncontro ller com bines a P I D servo w ith velocity feedfo r w ard and accelerati on feedfo r w ard contro l to i m p rove perfo rm ance .T estresults show ed that the po siti oning p recisi on w as w ithin ±1″during stable operati on of 1.148h .T he step response interval is less than 50m s and mo ti on fluctuati ons are less than ±10%,so the system p rovides accurate po siti oning servo contro l .Key words :navigati on system;h igh 2p recisi on servo turn table;feedfo r w ard contro l;circular grating惯性导航系统在现代化技术中,尤其是在国防技术中,占有非常重要的地位。
微电子制芯领域中磁悬浮精密定位平台的研究

微电子制芯领域中磁悬浮精密定位平台的研究I. 综述在微电子制芯领域中,磁悬浮精密定位平台的研究是一个非常重要的方向。
这个领域的发展,不仅关系到我们国家的科技进步和经济发展,更关系到我们人民的生活质量和幸福指数。
磁悬浮技术的出现,使得我们可以在更高的精度和更快的速度下进行芯片制造,这对于提高我们的科技实力和国际竞争力具有重要的意义。
然而磁悬浮精密定位平台的研究并不是一件容易的事情,它需要我们对材料科学、机械设计、电子工程等多个领域有深入的理解和掌握。
同时我们还需要有创新的思维和敢于挑战的精神,才能够在这个领域取得突破性的进展。
微电子制芯领域的发展和重要性微电子制芯领域是当今科技发展的重要支柱之一,它在很大程度上决定了电子产品的性能和质量。
随着科技的不断进步,人们对电子产品的需求也在不断提高,从而推动了微电子制芯领域的快速发展。
在这个领域里,磁悬浮精密定位平台的研究尤为重要,因为它关系到制芯过程的精确度和效率。
磁悬浮精密定位平台的研究不仅有助于提高制芯过程中的自动化程度,还能降低人力成本,提高生产效率。
此外这种技术还能够减少制芯过程中的误差,确保产品质量的稳定性和可靠性。
可以说磁悬浮精密定位平台的研究对于推动微电子制芯领域的发展具有重要意义。
在这个充满竞争的时代,谁能掌握先进的技术和设备,谁就能在市场上占据优势地位。
因此我们必须加大对磁悬浮精密定位平台研究的投入,鼓励更多的科研人员投身于这一领域,为我国的微电子制芯事业做出更大的贡献。
同时我们也要关注这一领域的国际动态,学习借鉴国外先进的技术和经验,努力提升我国在这一领域的整体实力。
磁悬浮精密定位平台的研究对于微电子制芯领域的发展具有举足轻重的地位。
让我们携手共进,为实现我国在这一领域的突破和发展而努力奋斗!磁悬浮精密定位平台在微电子制芯中的应用在微电子制芯领域,磁悬浮精密定位平台的应用可谓是一大创新。
这种平台的出现,不仅提高了生产效率,降低了生产成本,还为微电子制芯行业带来了更多的可能性。
高精度测量与控制系统的设计与实现

高精度测量与控制系统的设计与实现现如今,高精度测量与控制系统的设计与实现已经成为工程、科学领域中至关重要的一环。
这个系统的作用在于通过精确测量的方式,对被测量对象进行控制和管理,从而实现科学研究、工业制造、交通运输等领域的进步与发展。
在本文中,我将从设计、实现和应用三个方面,对高精度测量与控制系统进行探讨。
首先,让我们来看设计这个系统的重要性。
在设计阶段,我们需要考虑的主要因素包括测量的精度、稳定性以及适应不同环境的能力等。
为了达到高精度的要求,我们需要选择合适的传感器和数据采集装置,并且结合高性能的计算平台,以实现精确的测量和实时的数据处理能力。
此外,设计过程中还需要考虑系统的可靠性和安全性,确保在各种极端条件下仍能够正常运行。
接着,我们来探讨系统的实现过程。
在实现高精度测量与控制系统时,我们需要充分利用现有的技术和工具。
例如,利用微电子技术和光电子技术,我们可以设计出更加灵敏和稳定的传感器;利用嵌入式系统和高性能计算机,我们可以实现实时数据采集和处理。
此外,还可以利用机器学习和人工智能等技术,对采集到的数据进行分析和预测,提高系统的智能性和自适应性。
总之,系统的实现过程需要集成各种技术手段,以提高系统的性能和效率。
最后,我们来探讨高精度测量与控制系统的应用领域。
这个系统在科学研究中扮演着重要的角色,例如在天文学中,高精度的望远镜能够观测到更加遥远的星系和天体,为宇宙的探索提供数据支持;在生物医学领域,高精度的医疗设备能够提供更加准确的诊断结果,为疾病的治疗和预防提供帮助;在工业制造中,高精度的控制系统能够确保产品的质量和稳定性,提高生产效率。
除此之外,高精度测量与控制系统还应用于航空航天、交通运输、环境监测等领域,为社会的进步和发展作出贡献。
综上所述,高精度测量与控制系统的设计与实现对于工程、科学领域的发展至关重要。
在设计阶段,我们需要考虑测量精度、稳定性和适应性等因素;在实现过程中,我们需要利用现有的技术和工具,提高系统的性能和效率;在应用领域,这个系统在科学研究、工业制造和社会发展等方面都发挥着重要的作用。
面向CORS的精密定位服务软件体系设计

面向CORS的精密定位服务软件体系设计∗李健吕志平李建伟乔书波解放军信息工程大学测绘学院,河南郑州 450052摘要:针对CORS服务体系的数据共享和服务共享问题,从软件工程角度对CORS的数据采集、处理、计算、分发、服务等方面作了进一步梳理,建立了较完备的网络体系和软件体系模型,提供了一个较完备的面向CORS的软件平台设计思路。
本文的设计成果和实践,可有效地改善当前CORS领域软件开发现状中软件和研究成果保密、软件功能单一、无统一的开发标准和架构模型等问题,具有一定的实用价值。
关键词:GNSS CORS 连续运行参考站定位服务软件1引言卫星定位连续运行参考站网(Continuously Operating Reference Stations,CORS)是一种将GNSS导航定位技术、现代通讯技术、计算机技术、测绘技术等多种技术集成的分布式网络系统,它提供移动定位、动态连续的空间框架等空间位置信息服务,是城市、地区和国家不可或缺的空间信息基础设施[1]。
CORS 的运作很大程度上改变了大地测量总体上通过间接形式为国家建设服务的方式,它将一系列的定位信息利用网络和数字通讯技术提供、分发给广大用户,使大地测量能以更快捷、更广泛地直接开放形式服务于建设。
国际上主要的CORS有国际GNSS服务局(International GNSS Service,IGS)的全球IGS站网,美国CORS 和欧洲永久性连续运行网(EUREE Permanent Network,EPN)为代表的洲际或国家网络[2],[3]。
近年来,国内较著名的有中国地壳运动监测网络、沿海差分站网系统、信息产业部建立的电离层监测网络、上海地区以监测气象参数为主的观测网络等,深圳、香港、北京、武汉等10余个等城市也相继建立了不同规模的CORS系统[4]。
目前,国内外对CORS技术的研究主要集中在基础设施建设、系统自动化管理和数据采集与分发、定位技术的开发等方面。
微电子封装设备精密定位系统的分析

机 。采用此方式 , 可有效地提高平 台的运动速度和定位精度。
34 音 圈 电机 驱 动 方 式 .
基 于安培力原理 制造 , 理论上具有元 限分辨率 、 无滞后 、
2 X Y工作 台形 式
2 1 滚 动 和 滑 动 导轨 工 作 台 .
1 机构 形式
11 串联 机构 .
滚动和滑动导轨是工作台 中一种常见 的导轨形式, 它具有
行 程大, 运动灵活、 结构 简单、 工艺性 好 、 易实现较高 的定位 容
精 度的优 点。图 3为采用滚珠导轨作为微动工作 台的支承和
导 向元件, 现了对 自动分步重 复光刻机 的微 定位 , 位精度 实 定
为 ±0 1z" . 1 ," Ii 1 o
微 电子封装设备 的工作 台, 多只需要 完成平面二维运 大
动 。 每一 维 的运 动 机 构 , 由 电 机 提 供 动 力 , 珠 丝 杆 螺 母 将 都 滚
电机的旋转运动转变为直线运 动 ,或者直接采用 直线 电机 的
等关键技术 的现状 , 为研发新型微 电子封装 高精 密定位 系统提供 参考。
关键词: 密定o- 精 .xY工作 台; " ; 驱动方式; / g动控制 器: 实时检测 中图分类 号: B 8 . T 461 文献标识码: A 文章编号 :6 2 5 5 2 0 1 — 0 1 0 1 7 — 4 X(0 8)1 0 4 — 4
自由度 的终端操作器 相连而构成的。 串联机构相比 , 与 具有刚 度大 、 结构稳 定、 载能力大 、 承 响应速度快及 运动精度 高等优
由于运动平 台和驱动机构采用非接触式 的磁 悬浮驱动技
术, 因此没有摩擦力 和机械部件的磨 损, 易于实 现高精度 、 大范 围的要求 。 5为俄亥俄州立大学精密工程实验室设计 的磁悬 图
苏州市科学技术局关于2022年度姑苏创新创业领军人才计划(区域重点产业专项)拟立项名单的公示

苏州市科学技术局关于2022年度姑苏创新创业领军人才计划(区域重点产业专项)拟立项名单的公示
文章属性
•【制定机关】苏州市科学技术局
•【公布日期】2022.12.12
•【字号】
•【施行日期】2022.12.12
•【效力等级】地方规范性文件
•【时效性】失效
•【主题分类】科技计划
正文
苏州市科学技术局关于2022年度姑苏创新创业领军人才计划(区域重点产业专项)拟立项名单的公示根据《关于组织申报2022年度姑苏创新创业领军人才计划项目的通知》,经自主申报、形式审查、领域评定、面试答辩、实地考察,现将2022年度姑苏创新创业领军人才计划(区域重点产业专项)拟立项名单进行公示。
公示期为2022年12月12日至12月16日,为期5天。
任何单位和个人如有异议,可在公示期内以书面形式提出,并列举异议理由和相关证明材料。
以个人名义提出异议的,需写明自己的真实姓名、单位、联系地址和电话等;以单位名义提出异议的,需要加盖单位公章。
原则上匿名异议不予受理。
联系地址:苏州市人民路979号苏州市科学技术局
邮政编码:215002
业务部门:市科技局外国专家局(科技人才处),65119071
监督部门:市科技局机关纪委,65233021
附件:区域专项公示名单
苏州市科学技术局
2022年12月12日附件
关于2022年度姑苏创新创业领军人才计划(区域重点产业专项)拟立项名单的公。
基于音圈电机的主动光学力促动器研究

基于音圈电机的主动光学力促动器研究陈子豪;顾永刚;翟超【摘要】In this paper, VCM was used as the driver of the force actuator. With using deadbeat control theory to realize position feedback controlling the VCM, fast response, no steady - state error, small overshoot, rapid recovery, high - resolution were achieved. These control system performance indicators cannot deeply improve by the traditional PID control algorithm.%采用音圈电机实现直线位移校正,采用最少拍控制理论对音圈电机进行位置反馈控制,实现了快速响应,无稳态误差,超调小,扰动快速恢复,高分辨力等传统PID控制算法无法大幅优化的控制系统性能指标.【期刊名称】《机械与电子》【年(卷),期】2012(000)006【总页数】3页(P47-49)【关键词】大口径望远镜;波前误差;音圈电机;直线位移;最少拍【作者】陈子豪;顾永刚;翟超【作者单位】中国科学技术大学精密机械与精密仪器系,安徽合肥230027;中国科学技术大学精密机械与精密仪器系,安徽合肥230027;中国科学技术大学精密机械与精密仪器系,安徽合肥230027【正文语种】中文【中图分类】TH740 引言主动光学是大口径望远镜中的关键技术,主动光学系统是闭环控制的校正波前误差的系统,由波前传感器、计算机控制系统、校正元件和校正促动器组成。
主动光学校正的误差源主要来自光学和机械加工、装校等产生的系统误差及望远镜由于重力和温度梯度变化而产生的变形,因此,校正频率较低,最高频率约为10-2 Hz,但如果还要校正一部分低频的圆顶内和主镜上的大气扰动以及风载引起的误差,则校正频率要高达10Hz[1]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
De i n o o i n Co t o y t m t g pe d a d H i h sg fM to n r lS s e wih Hi h S e n g Pr c so sto i a f r f r I Pa k g e ii n Po ii n ng Pl t o m o C c a e
o h a l t cu e a d te c a a trsi fte a tao ,mah maia d lo h o to y tm sgv n. ft e tbe sr tr n h h rce it o h cu tr u c t e tc lmo e ft e c n rls se i ie C n i ei g te rm n n ir t n u ig te hg  ̄e u n t ̄s a d so s h nmu d a b a e p n e o sd rn h e a tl ai s d rn h ih b o q e tsa n tp ,t e mi i m e d e trs o s c n rlig ag rt m sito u e o t o to y tm o rd c h c a ia e o a c thg c eeain o tol lo i n h i n rd c d t hec nrls se t e u et e me h n c lr s n n e a ih a c lrto
b r o to l oih h sa s tig t flwe h n 2 , n a c lrto f8 o ec n rlag rtm a et i o o rt a 0 ms a c eeain o g,a p st nn c u a yo n me o ii i g a c rc f o lwe h n2 m ,a d ap sto ig a c r c fr p aa i t fa o t1 m. tid c td t es se i r b s n o rt a n o i n n c u a yo e e tbl y o b u i i I n iae h yt m s o u ta d
A sr c :T mpo etepe i o n fce c f h nert i ut I p c a e - OF hg p e b ta t oi rv rcs n ad e iin yo eitgae cr i C) ak g ,a2 D i s ed h i t d c ( h
a d hih p e iinXY p sto ig tbed ie y v iec i a tao sp e e t d B s do h y a c a ay i n g rcso o i n n a l rv n b oc ol cu tri r s ne 、 a e n ted n mi n lss i
ZH ANG — i DU W e—a Da we , ito, F ENG a — i Xio me
( col f c ai l nier g Taj nvri , i j 00 2 hn ) S ho o hn a E g ei , i i U i sy Ta i 3 0 7 ,C ia Me c n n nn e t nn
a d d c l r t n r t s T e r s l f t e smu a i n a d e p rme ts o t tt e p st n n t m sn — n e e e a i a e . h e u t o h i l t n x e i n h w ha h o ii i g s s e u i g a o s o o y
张大卫 , 杜伟 涛 ,冯晓梅
( 津 大学 机 械 1 程 学 院 , 津 30 7 ) 天 = 天 0 02
摘 要 :为 提 高芯 片封 装 的 加 工精 度 和 效 率 , 出 了一 种 由 音 囤 电 机 驱 动 的 二 自 由度 高速 精 度 定 位 平 台, 基 于 提 并
音 圈 电机 的 性 质 和 平 台 结构 的 动 态 分析 , 立 了平 台控 制 系统 数 学模 型 . 降低 高 速 频 繁 起 停 过 程 中 定 位 系 统 产 建 为 生 的 残 余振 动 , 最 小 的超 调 量 快 速 达到 稳 态 响应 允许 波 动 范 围的 最 小 节 拍 响 应 控 制 策 略 来 进 行 参 数 优 化 . 0 6年 9月
人 津 大 学 学 报 J u nl f i jnU i ri o r a a i nv s y oT n e t
V0 . 9 No 9 13 .
S p. 2 06 e 0
统 面 向芯 片 封 装 高 精 密 定 位 平 的 速 台控 制 系 设 计
进行 系统理论仿真和 实验验证 , 结果表 明, 所设计的控 制 系统 , 稳定 时间小 于 2 l, 动加 速度 可达 8 定位精度 0Is运 l , 小于 2 m, 重复定位精度 为 1 m左右 , 该控 制 系统动态品质优 良, 鲁棒性好. 关键词 :芯 片;引线键合 ; 圈电机 ; 音 最小节拍响应