基于CAN通信的计算机联锁IO仿真系统设计
国内外计算机联锁发展概况概要

(故障切换)
* 机器采用专用机还是通用机
* 控制电路电子化问题
软件冗余结构:
*双软件比较输出 *单软件+算法 *单软件+测试软件
打印机
人机 对话级 双总线 区域 计算机 接口级
控制键
键盘
数字化仪
通讯 显示器 显示器
大屏幕 大屏幕 显示器 显示器
控制操作级
工作站
通讯机
LAN
SIDOS
SISMI
系 统
-联锁功能软件—采集道岔,信号,区段轨 道电路,自动闭塞,半自动闭塞,道口等现场设备 状态,为保证列车行车安全而必须进行各种设备相 互照查的逻辑处理软件,并按指令生成各种控制命 令,操纵道岔和开放信号。
发展计算机联锁系统目前迫切要解决的问题:
现场对联锁系统的测试验收问题,包括站场修改后的联锁验收, 过渡工程的联锁验收。 系统的自检测,自诊断功能的完善。 系统的CAD设计和模拟仿真测试。 远程诊断的开发和完善。 远程控制的模块开发。 计算机联锁维修制度的确定,明确一、二级维修中心的职责。 与调度集中、调度监督设备的一体化。 与列控系统设备的一体化。 培训。 系统软硬件的挡案管理。
错误解锁、错误开放信号、漏解锁、联锁概念错误 盲目降低造价 维修培训跟不上
加强计算机联锁管理的主要文件
电务局《关于积极稳妥发展计算机联锁的通知》 (电信〔1997〕83号) 铁道部《关于加强车站计算机联锁上道管理的通知》 (铁电务〔1998〕94号) 铁道部《关于落实铁道部加强车站计算机联锁上道 管理的通知》 (铁运函〔1999〕14号) 铁道部《关于印发加强车站计算机联锁管理十条意 见的通知》 (铁运〔1999〕112号)
工程 设计 改造
控制 和 显示
多通道实时CAN总线模拟器设计
多通道实时CAN总线模拟器设计作者:王会敏张遂南来源:《现代电子技术》2009年第22期摘要:为了满足CAN总线在实际通信应用中高实时性和高可靠性的要求,通过对CAN总线通信协议的研究,提出并设计一种由单片机负责控制的多通道实时CAN总线模拟器的设计方案。
该方案在硬件设计上以可编程逻辑技术为基础,采用复杂可编程逻辑器件(CPLD),结合硬件描述语言VHDL,实现了单片机与CAN控制器之间逻辑控制单元的设计。
通过在Xilinx ISE平台下对该程序进行编译和综合,在Modelsim 环境下进行仿真测试,证实了该方案的可行性。
通过实际工程的验证和使用结果表明,该设计方案满足实际通信的要求。
着重阐述整个系统的设计过程,并给出了关键技术的设计思路与重要部分代码。
关键词:CAN;实时性;单片机中图分类号:TP274CAN总线与一般的串行通信总线相比,它的数据通信具有可靠性高,实时性高,灵活性强等优点,不仅广泛应用于汽车行业,而且扩展到了机械工业、机器人、数控机床等诸多领域。
尤其在大量数据通信处理中,高可靠性及实时响应的场合,单通道CAN总线不能满足实际通信的要求。
为此,介绍一种基于多通道实时CAN模拟器的设计方案。
1 CAN总线技术介绍1.1 CAN总线特性CAN(Controller Area Network)总线是一种串行多主站控制器局域网总线。
它具有很高的网络安全性、通信可靠性和实时性,并且简单实用,网络成本低。
它主要用于各种过程监测及控制的一种网络。
CAN最初是由德国BOSCH公司为汽车的监测、控制系统而设计的。
由于CAN 总线具有卓越的特性和极高的可靠性,特别适合于工业过程中监控设备的互连,具体来说,CAN具有如下特性(1) CAN可以多主方式工作,网络上任意一个节点均可以在任意时刻主动地向网络上的其他节点发送信息,而不分主从,通信方式灵活(2) CAN可以点对点、点对多点(成组)及全局广播方式传送接收数据(3) CAN网络上的节点信息可分成不同的优先级,可以满足不同的实时要求(4) CAN采用非破坏性总线仲载技术。
计算机联锁仿真试验探讨
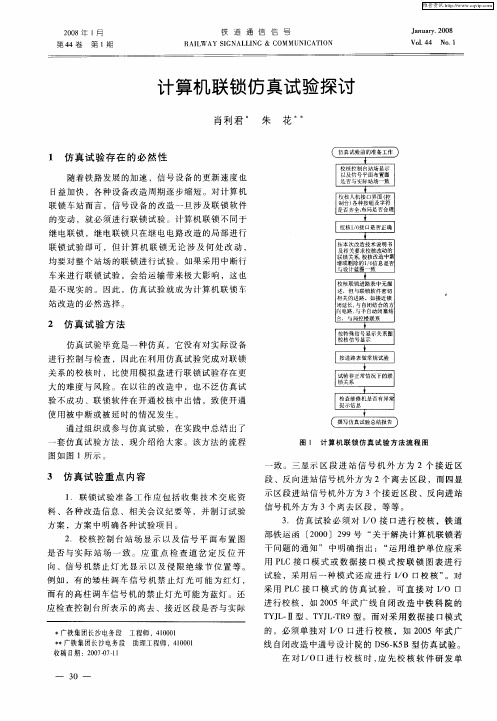
按特殊信 号显示 关系 图 校 核信 号显示
+
按进 路表 做常规试验
●
试验 非 正常情况 下的联 锁 关系
●
检 查维修机 是否有异 常 提示 信息
I
撰写 仿真试验 总结报 告
通过组 织或参 与仿真 试验 ,在实践 中总 结出 了
一
套 仿真试 验方法 ,现介 绍给 大家 。该 方法 的流程
增或 删除 的I O / 信息 是否 与设计 蓝图一 致
联锁试 验 即可 ,但 计 算机 联 锁无 论 涉 及何 处 改 动 ,
均要对 整个 站场 的联 锁进行 试验 。如果采 用 中断行
车来进 行联锁 试验 ,会给运 输带来极 大影 响 ,这也 是不 现实的 。因此 ,仿真试 验就成 为计算 机联锁 车
向 、信号 机禁止 灯 光显 示 以及 侵 限绝 缘 节 位置 等 。
例如 ,有 的矮柱 调 车信 号 机禁 止 灯光 可 能 为红 灯 ,
而有 的高柱 调车信 号机 的禁止灯 光可 能为蓝灯 。还
应检查 控制 台所表 示的离 去 、接 近 区段 是否 与实际
广铁集团长沙电务段 工程师,400 10 1 广铁集团长沙电务段 助理工程师 , 101 400 收稿 日期 : 07 71 20 ̄ —1
维普资讯
20 0 8年 1 月 第4 4卷 第 1期
铁 道 通 信 信 号
RAI LW AY I S GNALLI NG & COM MUNI CAT1 0N
Jn a . 0 a u  ̄ 2 08
Vo . 4 No 14 .1
计算机联锁仿真试验探讨
示区段 进站信 号机外 方为 3个接近 区段 、反 向进 站
铁路信号计算机联锁仿真系统的设计与实现的开题报告

铁路信号计算机联锁仿真系统的设计与实现的开题报告一、选题背景和意义铁路信号联锁系统是保障铁路交通安全和运行的关键系统之一,它通过控制信号和道岔的开闭,实现列车运行的安全与高效。
计算机联锁仿真系统是为了方便信号计算机的联锁设计师在设计过程中,通过电脑仿真技术进行实时调试和联锁表的生成。
同时,针对联锁系统的故障和补救措施,可以进行模拟实验,以提高联锁系统的可靠性和稳定性。
二、主要研究内容和方向1. 设计一个实用的铁路信号计算机联锁仿真系统,支持信号机的设置、道岔的变化和列车的运行仿真。
2. 实现联锁控制逻辑的编写和正常运行的验证,包括信号机和道岔的间接控制和直接控制。
3. 合理选择仿真器的数据结构和算法,提高系统的运算效率和速度。
4. 制定可靠的测试方案,对仿真系统进行全面测试和评估。
三、研究计划与进度安排第一阶段(10天):调研现有的仿真系统,研究信号联锁的原理和方法,确定仿真系统的需求和目标。
第二阶段(20天):设计仿真系统的总体框架和流程,尝试通过UML等建模工具进行可行性分析和要求分析,确定仿真器的模块分配、互相调用的规定和交互方式。
第三阶段(60天):实现仿真器的主要功能模块,包括信号机和道岔的控制和操作逻辑、联锁表的生成和仿真、列车的运行和控制逻辑等。
第四阶段(20天):测试和评估仿真系统的性能和稳定性,实现自动化测试的方法和流程。
第五阶段(10天):完善系统的用户手册和技术文档,并提交毕业论文。
四、论文的创新之处1. 设计一个可实用的信号计算机联锁仿真系统,通过多种仿真手段进行实际联锁的仿真,较大程度上避免了现有仿真器中所产生的误操作和漏操作等情况。
2. 仿真器的设计和实现采用C++等面向对象的编程思想,层次清晰,模块化,易于维护和升级,并在总体结构中实现了完备性和高效性的平衡。
3. 通过自动化测试协助,提高了仿真系统的可靠性和实用性,实现了自主操作和维护的便捷性和高效性。
五、预期的研究成果和应用价值完成本课题后,可以获得以下成果:1. 能够设计和实现一个实用的信号计算机联锁仿真系统,满足实际需求。
基于PLC+MCGS Pro的计算机联锁终端仿真系统设计

基于PLC+MCGS Pro的计算机联锁终端仿真系统设计戴乾军;董红生;余升亮;张迪
【期刊名称】《兰州工业学院学报》
【年(卷),期】2022(29)5
【摘要】针对轨道交通信号专业实践教学的特点,为满足实践教学项目的综合性、设计性和创新性的改革要求,以S7-200 SMART PLC为核心控制单元,并结合昆仑通态MCGS Pro组态软件开发了额济纳站计算机联锁终端仿真系统。
结果表明:系统可实现站场作业仿真及进路自动生成,同时可采集道岔、信号机和轨道区段的信息,并监控其状态。
可帮助学生提升知识综合应用能力和创新实践能力。
【总页数】4页(P25-28)
【作者】戴乾军;董红生;余升亮;张迪
【作者单位】兰州工业学院电气工程学院;兰州理工大学能源与动力工程学院【正文语种】中文
【中图分类】TP391.9
【相关文献】
1.基于CAN通信的计算机联锁IO仿真系统设计
2.基于Pro/E平台机械液控式软启动系统设计与仿真
3.基于Pro/E和ADAMS的拖拉机齿轮系统设计与仿真
4.基于Master CAM和Pro/E的齿轮快速精确建模及仿真分析基于MasterCAM和Pro/E的齿轮快速精确建模及仿真分析
5.基于Web的计算机联锁仿真系统设计
因版权原因,仅展示原文概要,查看原文内容请购买。
计算机联锁仿真系统及ctc简易操作

1、 DS6-K5B计算机联锁仿真系统系统的电脑盘面图与现场DS6-K5B型车站计算机联锁系统完全一致,系统根据作业情况可办理列车作业、调车作业、溜放作业,能够单独操纵道岔、单独锁闭道岔等功能以及各种常见故障的仿真。
操作过程中屏幕上有各种提示信息,若办理进路的操作有误时,屏幕上将显示相应的错误提示,并辅以语音报警提示。
1.1 功能按钮功能按钮以下功能按钮按照咽喉设置,根据上下行咽喉分别设置在屏幕上方的左边和右边。
具体按钮名称和作用如下:总定、总反-用于单独操纵道岔;单锁、单解-用于对道岔进行单独锁闭和单独解锁操作。
道岔单独锁闭后可以排列经过该道岔所在位置的进路,但是不能单操道岔;岔封、岔解-在施工、维修等情况下对道岔进行单独封锁/解封操作。
道岔封锁后不能再排列经过此道岔所在位置的进路,但是可以单操道岔;钮封、钮解-用于对信号按钮进行封闭/解封操作。
信号按钮闭锁后不能排列以此信号为始终端的进路;取消、人解-用于取消进路和人工解锁进路;总锁-用于对相应咽喉的引导总锁闭(注意:办理引导总锁闭时该咽喉的所有道岔均锁闭,但不能开放对应进站信号的引导总锁闭的信号,且本咽喉内不能再正常排列进路);区解-用于区段事故解锁;以上所有按钮若按钮名为红色,则表示其为需破铅封的按钮,否则表示其为不需要破铅封的按钮。
非常站控与分散自律转换按钮:系统通过“非常站控”按钮与CTC进行通信。
当系统处于分散自律模式时,按钮处于抬起状态(),此时可按下按钮将控制权改为站控模式。
当系统处于站控模式时,按钮处于按下状态,且文字改为“站控模式”(),当需转为自律控制时,点击按钮,系统将发送请求给CTC系统,若同意转换,系统将处于分散自律模式,按钮处于抬起状态()。
上电解锁:计算机联锁重新上电后,将本站所有道岔锁闭到当前位置,并禁止办理任何进路作业,人工确认可以进行信号作业后,对此按钮破铅封后将全站进行相关作业。
引导:根据列控系统需求,对列车信号设置引导按钮,引导按钮一般设置在列车信号机旁,用白色的方框表示;当需办理引导进路时,确认相关道岔位置和相关区段无车时,可通过按压此按钮进行引导进路的办理;办理发车引导时,计算机联锁需检查区间第一离去区段为空闲状态,否则无法建立发车引导进路。
车站信号计算机联锁控制系统软件.课件.ppt

2、联锁控制功能
基本联锁控制功能主要实现进路控制,进路控制过程分 为两个阶段:进路建立和进路解锁。
进路控制
进路建立 进路解锁
进路选择 进路锁闭 开放信号
信号开放保持
自动解锁
正常解锁 调车中途返回解锁
非自动解锁
取消进路 人工解锁 故障解锁 ……
计算机联锁技术计算机联 第4页,共21页。
除进路控制功能模块外,还包括信号操作、道岔操作等功能 (3)信号操作功能
模块 1
模块 2
模块 n-1
模块 n
计算机联锁技术计算机联 第16页,共21页。
1、进路建立过程
(1)选排一致检查及道岔控制命令生成子模块 功能需求
进路选排一致性检查及道岔控制命令形成子模块的基本功能是检查道岔位置是否符合进路要求,如果不符合则 形成相应的道岔控制命令。
实现技术条件的功能函数
BYTE 进路选排处理(BYTE l1) {
计算机联锁技术计算机联 第10页,共21页。
计算机联锁技术计算机联 第11页,共21页。
计算机联锁技术计算机联 第12页,共21页。
(三)动态数据及其结构
参与进路控制的动态数据主要包括操作输入变量、状态输入变量、表示输出变量、控 制输出变量以及联锁处理的中间变量等。
1. 操作输入变量 在联锁系统中,为了防止误动一个操作而形成操作命令,一般需由两次或两次
以上的操作才能形成操作命令。
作用:形成操作命令,作为表示信息的原始数据和监测系统的记录内容。
2.状态输入变量 状态输入变量是反映监控对象状态的变量,如轨道区段状态、道岔定位状态、道岔
反位状态、信号状态、灯丝状态,以及与进路有关的其他设备状态等。 作用:参与联锁运算外,还作为表示信息和监测系统的原始数据
课程设计方案CAN总线数据通信系统设计方案
CAN总线数据通信系统的设计摘要现场总线是当今自动化领域技术发展的热点之一,被誉为自动化领域的计算机局域网。
它的出现为分布式控制系统实现各节点之间实时、可靠的数据通信提供了强有力的技术支持。
CAN(ControllerArea Network>属于现场总线的范畴,是一种多主方式的串行通讯总线,数据通信实时性强。
与其它现场总线比较而言,CAN总线具有通信速率高、容易实现、可靠性高、性价比高等诸多特点。
本系统要在单片机中实现CAN总线的接口,通过CAN总线,实现两个模块之间的数据通讯。
系统主要由四部分所构成:PC机、微控制器80C51、独立CAN通信控制器SJA1000和CAN总线收发器PCA82C250。
微处理器80C51负责SJA1000的初始化,通过控制SJA1000实现数据的发送和接收等通信任务。
CAN总线节点的软件设计主要包括三大部分:CAN节点初始化、报文发送和报文接收。
本系统通过扩展CAN总线控制器SJA1000,在单片机系统中实现了CAN总线的接口,并且编写了SJA1000的驱动程序,通过读写其的内部寄存器,完成工作方式的设置、接收滤波方式的设置、接收屏蔽寄存器<AMR)和接收代码寄存器<ACR)的设置、波特率参数设置和中断允许寄存器<IER)的设置等基本操作;利用各基本操作,完成了对SJA1000的初始化,并且实现了数据发送和接收。
目录第1章原理与方案11.1设计目的与要求11.2CAN总线介绍11.3设计方案21.3.1 硬件设计方案21.3.2 软件设计方案4第2章硬件连接与说明52.1硬件连接52.1.1 模块使用说明62.1.2 实验箱连线62.2CAN总线控制器SJA100062.3CAN控制器接口PCA82C2507第3章软件流程图及说明83.1软件流程图83.1.1 主程序流程图83.1.2 初始化子程序流程图83.1.3 发送数据子程序流程图103.1.4 接收数据子程序流程图103.2软件实现过程10第4章结果分析及心得体会124.1结果分析124.2心得体会134.2.1 CAN应用中的问题144.2.2 CAN总线的其他应用14 附录程序清单15参考文献23第1章原理与方案1.1 设计目的与要求扩展CAN总线控制器,在单片机系统中实现CAN总线的接口,并编写接口芯片的驱动程序。
计算机联锁工程设计毕业设计
计算机联锁工程设计毕业设计计算机联锁工程设计是指利用计算机技术对联锁系统进行设计和优化的工作。
联锁系统是一种用于控制列车运行的安全设施,它确保了列车在铁路上安全、顺畅地运行。
传统的联锁系统依靠人工操作和机械元件来完成列车运行的控制,但随着计算机技术的飞速发展,计算机联锁系统被广泛应用于铁路交通管理中。
计算机联锁工程设计的目标是利用计算机技术优化联锁系统的设计和运行效率,提高铁路交通管理的安全性和效能。
计算机联锁系统设计需要完成以下几个主要任务:首先,需要对铁路交通流量进行调查研究,了解铁路交通的运行规律和瓶颈;然后,需要对联锁系统的结构和功能进行分析,并根据铁路交通的特点和需求确定系统设计的目标和要求;接下来,需要进行联锁系统的硬件和软件设计,确定系统的拓扑结构和通信协议,并编写相应的程序代码;最后,需要进行联锁系统的仿真和测试,并根据实际运行情况对系统进行优化和改进。
在计算机联锁工程设计中,需要考虑的主要问题包括系统的可靠性、安全性和实时性。
系统的可靠性是指系统在长时间运行中的稳定性和可靠性,需要对硬件设备进行质量控制和故障处理。
系统的安全性是指系统在被攻击或出现意外情况下的保护能力,需要对系统进行安全防护和监控。
系统的实时性是指系统对于铁路交通变化的快速响应能力,需要对系统的通信和计算性能进行优化。
计算机联锁工程设计的实施需要具备一定的技术和经验,需要对计算机网络、通信技术、软件开发和系统集成等方面有一定的专业知识和技能。
此外,还需要对铁路交通运行和管理有一定的了解和研究,以便能够根据实际需求进行系统设计和优化。
总之,计算机联锁工程设计是一项综合性的、技术密集型的工作,需要综合考虑多个因素,包括系统的安全性、可靠性和实时性等。
通过合理的设计和优化,可以提高铁路交通管理的效能和安全性。
高铁计算机联锁仿真培训系统的设计与实现

高铁计算机联锁仿真培训系统的设计与实现摘要:随着中国高速铁路建设的不断发展壮大,高铁计算机联锁仿真培训系统的需求越来越多。
本论文从系统设计与实现两个方面,对高铁计算机联锁仿真培训系统进行详细探讨。
实践证明,本系统能够有效地提高人员的培训效率和水平。
关键词:高铁、计算机、联锁、仿真、培训系统一、引言高速铁路的发展使得列车速度达到了惊人的境地,然而为了保证列车的行车安全和准时性,高铁计算机联锁系统扮演着重要的角色。
计算机联锁系统是指在一定区域内,利用计算机智能化控制技术,将信号机、道岔、极限速度检查器等设备联成一个统一整体,实现列车行车路径的控制与监视。
因此,对高铁计算机联锁系统进行仿真可以有效提高系统的可靠性,降低事故发生的概率,而培训系统则是对系统操作人员进行培训和考核的关键环节。
本文着重分析高铁计算机联锁仿真培训系统的设计与实现,通过实验探究,优化不足,提高系统的稳定性和可靠性,为系统的庞大运作提供一份有效的解决方案。
二、系统设计高铁计算机联锁仿真培训系统的设计需考虑以下几个方面:1、仿真器硬件设计仿真器硬件设计主要包括虚拟机、软件仿真器,以及运行仿真器的计算机。
虚拟机是指一个模拟计算机系统的软件程序,通过虚拟机可以将计算机操作系统映射到虚拟机上进行运行。
而软件仿真器则可以模拟高铁计算机联锁系统所采用的信息留置原则,使得在仿真的过程中,系统能够模拟车辆进出站、限速过程等各种情况,从而达到真实还原高铁计算机联锁系统的功能。
2、仿真系统操作界面设计仿真系统的操作界面设计直接影响到培训人员的使用体验。
本文设计了基于Qt设计师的操作界面,使得用户可以直观地观察仿真系统的情况,设置仿真系统的参数。
3、数据录制与回放功能为了方便用户对培训过程进行回放以及误操作的修正,我们引入了数据录制与回放功能。
通过该功能,可以将所有模拟系统的操作记录下来,便于进行检查和修改。
三、系统实现高铁计算机联锁仿真培训系统的实现,主要涉及到以下技术:1、仿真器技术我们选择采用Python语言作为软件仿真器的基础语言,该语言具有高效、简洁、易学等特点。
基于DSP的CAN总线控制系统的设计

计算机技术 化工自动化及仪表,2006,33(6):50~52 Contr ol and I nstru ments in Che m ical I ndustry 基于D SP的CAN总线控制系统的设计陈晓侠,陆 坦,王立明(大连交通大学,辽宁大连116028) 摘要: 以SHCAN2000控制系统现场智能测控组件的升级为背景,介绍以DSP为现场智能测控单元微处理器的新型智能测控组件对系统控制功能及通信功能的改善。
详细介绍T MS2812信号处理器的eC AN模块以及其与C AN总线之间的通信,并给出其通信部分硬件和软件的设计方法,采用OPC服务器为上、下位机的I/O驱动程序,满足了现场智能仪表的计算复杂性和系统通信的时实性。
关键词: DSP;eCAN;OPC服务器 中图分类号:TP3 文献标识码:B 文章编号:100023932(2006)06200502031 引 言本文是在原有的基于CAN总线技术的SHCAN2000型现场总线控制系统的基础上进行通信功能和现场智能单元控制功能的升级。
SHCAN2000上位机监控软件采用的是I ntellution公司的F I X I/O驱动程序开发工具开发的专用驱动程序,只适合于F I X监控组态软件和单一厂家开发的下位机控制芯片,如果更换下位机就必须为上位机F I X监控软件重新开发I/O驱动,如更换监控组态软件就必须为其重新开发针对监控软件和下位机芯片的I/O驱动,大大限制了系统的集成性和通用性,给开发人员增加了极大的困难。
SHCAN2000系列智能仪表硬件采用MCS251系列单片机,外围电路大,功耗多。
为此,本课题组开发了基于T MS2812DSP处理器为核心的新型智能测控组件,并采用了OPC服务器实现I/O驱动,弥补了SHCAN2000系统中的缺陷。
2 改进后系统(MMB)的体系结构MMB现场总线控制系统采用三层体系结构,即操作站—CAN总线网络—现场控制单元。
基于STM32单片机CAN通信控制网络设计
基于STM32单片机CAN通信控制网络设计
柴文峰;丁学明
【期刊名称】《电子科技》
【年(卷),期】2017(030)003
【摘要】通过分析点对点通信方式控制网络的缺陷及总线的发展状况,利用CAN 总线的特点和优势,设计了基于广播方式通信控制网络.采用C#编写上位机界面做控制器,智能节点(下位机)作为执行器,根据CANKingdom应用层协议,制定节点间相互通信规则,将发送的控制命令以帧的形式进行打包,设计节点控制算法执行相应功能.文中设计的基于广播式CAN通信网络实现了对40个节点的数据通信和现场实时监控功能.
【总页数】4页(P142-145)
【作者】柴文峰;丁学明
【作者单位】上海理工大学光电信息与计算机工程学院,上海200093;上海理工大学光电信息与计算机工程学院,上海200093
【正文语种】中文
【中图分类】TN915.04;TP368.1
【相关文献】
1.基于CAN通信的变频电动机控制设计与实现 [J], 布朋生
2.基于CAN通信的掘进机自动控制系统设计 [J], 申洋
3.电动拖拉机CAN通信网络设计及硬件在环测试 [J], 徐海龙; 徐立友; 刘晓慧; 刘
孟楠; 王通
4.基于冗余CAN通信的智能集成供液控制系统 [J], 赵康康
5.重型拖拉机CAN通信网络设计 [J], 阚辉玉;李军伟;李德芳;高松
因版权原因,仅展示原文概要,查看原文内容请购买。
基于单片机控制的智能门锁设计
基于单片机控制的智能门锁设计基于单片机控制的智能门锁设计智能门锁作为现代家居安全的一个重要组成部分,在实现便利的同时,也需要具备高度的安全性能。
本文将介绍一种基于单片机控制的智能门锁设计方案,该方案通过采用微控制器作为控制核心,结合多种传感器和通信技术,实现了智能门锁的远程控制、安全保护、用户管理等功能。
1. 智能门锁设计方案概述本方案采用了一种基于单片机的设计方案,该单片机作为控制主芯片,通过与各种传感器和执行机构的连接,实现智能门锁的开关、检测、通信等功能。
该方案具备如下特点:高度集成、低功耗、良好的稳定性、开放性和可扩展性。
2. 系统组成与工作原理2.1 系统组成该智能门锁系统由单片机控制模块、密码输入模块、指纹识别模块、电子锁模块、蓝牙模块和远程控制模块等组成。
2.2 工作原理在正常使用过程中,当用户通过密码输入模块、指纹识别模块和蓝牙模块等方式进行认证时,单片机将接收到认证信息,并对信息进行处理。
在通过认证后,系统将解锁电子锁,用户可以开启门锁。
同时,门锁状态将通过蓝牙模块发送给用户手机端进行实时监控。
3. 技术细节与功能实现3.1 密码输入与指纹识别本方案采用了密码输入模块和指纹识别模块作为主要的认证方式。
通过密码输入模块,用户可以通过输入正确的密码实现门锁的解锁。
同时,指纹识别模块可以对用户的指纹信息进行采集和比对,实现更加安全的认证方式。
3.2 远程控制与用户管理该智能门锁系统还通过蓝牙模块实现了远程控制和用户管理功能。
用户可以通过手机APP连接到门锁系统,实现远程控制和监控。
用户可以随时查询门锁状态、查看开锁记录,并可以授权其他用户或撤销授权。
3.3 安全保护与警报功能智能门锁系统内置了多种安全保护措施,例如非法开锁报警、门锁错误操作报警等。
当系统监测到异常情况时,会及时触发警报,并通过蓝牙模块发送给用户手机端。
4. 实验结果与讨论经过实验验证,本方案设计的智能门锁系统在安全性、稳定性和使用便利性方面均表现出较好的性能。
基于can总线的轮询通信系统设计

随着社会经济发展,人们对多机通信的实时性、可靠性提出了更高的要求。
相应的,总线通信技术也紧跟应用需求,得到了前所未有的发展[1,2]。
当前在多机通信领域,常用的控制方式为并行集中式和串行分布式两种架构,其中传统并行集中式通信系统为对主控制器引出多条并行式信号线,实现单个主控制器对多台从机运行的控制,这种控制模式通常存在信号线走线占体积大、整机同步性能差、易受干扰、扩展维护困难等一系列问题[3,4]。
基于串行总线的多机通信系统,如CAN 总线的应用,系统整体性能相对于并行集中式有很大的提升,通信线路少、整机结构简约、扩展能力强。
然而,现行基于串行总线的多机同步通信、控制仍存在实时性、可靠性差等问题[5~7]。
系统整机通信机制所存在的缺陷,严重阻碍了多机控制系统的发展与应用。
针对上述多机通信技术层面与实际应用所存在的问题,本文给出了基于CAN 总线的多机轮询控制系统,系统采用CAN 总线实时通信算法,实现对多机运行的实时、同步控制。
第38卷第4期2019年12月计算技术与自动化Computing Technology and AutomationVol.38,No.4Dec.2019文章编号:1003—6199(2019)04—0075—06DOI :10.16339/ki.jsjsyzdh.201904015收稿日期:2018—09—22作者简介:王高高(1990—),男,安徽淮南人,硕士,助理工程师,研究方向:现场总线技术。
†通讯联系人,E-mail :quie123@基于CAN 总线的轮询通信系统设计王高高1†,王伟伟2(1.国网安徽省电力有限公司凤台县供电公司,安徽淮南232100;2.中建一局集团第一建筑有限公司,安徽合肥230031)摘要:针对传统CAN 总线通信系统基于仲裁发送机制所存在的通信通道易堵塞、实时性、可靠性差问题,设计了CAN 总线节点轮询通信系统。
系统CAN 总线通信机制为采用主从控制下的节点轮询方式。
基于CAN总线的开关控制电路设计与实现
CAN [
.
实际的 CAN总线通信是发生在单片机之 间的串行通信 ,但不是单片机之间的直接通信 ,而是发生 在以单片机为核心的通信设备物理层和数据链路层之间的信息传输 ,其 中,物理层是 CAN总线的硬件 层 ,主 要实 现物 理信 号传 输 、译 码 、位定 时 、位 同步 和位 驱动 ,而数 据链 路 层 能够实 现数 据 的总 线仲裁 、信 息 分段 以及 数据 拆封 、数 据应 答 、错 误 检测 、超 载 通 知 等功 能 [4].要 实现 CAN总 线 通 信 ,关键 是 CAN总 线通信的硬件设计和软件设计 ,在硬件设备上有的采用 8位单片机 ,如 PIC16F877_5 J,有的采用 16位单 片机 ,如 MC9S12X128。。 ,而 SJA1000和 TJA1050一 直是 作 为 CAN总线 通信 的控 制 器 和 收发 器 .江苏 启 东计 算 机 厂 生 产 的 DVCC一51NET单 片 机 开 发 板 装 有 SJAIO00和 TJA1050芯 片 ,在 开 发 板 上 插 入 STC89C52芯片 作为 主控 芯 片 ,将 TJA1050的端子 CAN—H(端子 7)和 CAN—L(端 子 6)用 双 绞线 与 其 他有 同样 装 置 的开发 板连 接起 来 ,就 可 以进 行 CAN总 线开 关控 制设 计 .
铁路车站计算机联锁仿真系统研究与设计
铁路车站计算机联锁仿真系统研究与设计铁路车站计算机联锁仿真系统研究与设计摘要:随着社会发展,交通运输的重要性日益凸显。
铁路作为一种高效、安全的运输方式,受到了越来越多的关注。
而铁路车站作为铁路运输的重要节点,更是需要高效、精确的管理和控制。
本文将针对铁路车站计算机联锁仿真系统的研究与设计,探讨其在提高铁路运输安全和效率方面的应用价值。
1. 引言铁路车站作为铁路运输的关键环节,其安全和运行效率的提升对整个铁路系统的安全与效益具有重要意义。
计算机联锁系统作为现代铁路系统的核心技术之一,主要负责控制调度、防止列车相撞、保证列车运行的平稳与高效。
在传统的铁路车站中,人工操作频繁,容易产生误操作和错误。
因此,引入计算机联锁仿真系统,对提高铁路运输的安全性和效率具有重要意义。
2. 铁路车站计算机联锁仿真系统的原理与功能铁路车站计算机联锁仿真系统是基于计算机技术和仿真技术开发的,旨在模拟铁路车站运行过程,并通过算法实现列车运行轨迹的计算和优化。
其主要功能包括:(1) 列车运行轨迹模拟:通过采集和分析车站车辆调度信息,对列车的运行轨迹进行模拟和计算,从而实现高效、安全的线路调度。
(2) 列车进站进路控制:根据列车运行轨迹模拟结果,对车站出入口的信号进行控制,确保列车按序进站进路,避免碰撞和混乱。
(3) 故障处理模拟:对于突发故障情况,系统可以进行模拟操作和故障排除,确保故障处理的及时性和准确性,减少对运行的影响。
3. 铁路车站计算机联锁仿真系统的研究与设计(1) 仿真系统模型的建立:根据具体车站的地理、车辆和设备情况,建立仿真系统所需的模型,包括车站拓扑结构、信号灯设备、列车运行条件等。
(2) 数据采集与分析:通过和实际车站的数据对接,采集并分析车站的调度信息,为仿真模型提供准确的输入数据。
(3) 算法设计与优化:根据仿真系统的功能需求,设计和优化相应的算法,以实现高效而准确的列车运行轨迹计算和调度。
(4) 系统界面设计:根据用户的使用需求,设计直观、易操作的系统界面,方便用户进行仿真操作和故障排除。
基于区块链的计算机通信网络安全加密控制系统设计和实现
Telecom Power Technology通信网络技术 2023年5月25日第40卷第10期· 133 ·Telecom Power TechnologyMay 25, 2023, Vol.40 No.10蔡万元:基于区块链的计算机通信 网络安全加密控制系统设计和实现证本文系统功能实现效果,技术人员应选用eclipse 开发工具、JAVA 编程语言,应用JSP 技术、Spring 技术和Hibernate 技术3种Web 展示技术,按照如图2所示的系统功能模块设计示意图,完成对以下功能模块的设计和实现[3]。
表1 用户信息表字段名字段说明数据类型允许空值User_id 用户编号int (20)否User_name 用户名varchar (60)否Login_account 登录账号varchar (12)否Login_Password登录密码char (36)否Email 邮箱varchar (60)否Telphone 电话char (12)否User_add 住址varchar (80)否表2 任务管理信息表字段名字段说明数据类型允许空值Hard_disk 硬盘varchar (50)否Memory 内存varchar (50)否Ethernet 以太网varchar (50)否Bluetooth 蓝牙varchar (50)否CPU 中央处理器varchar (50)否Remarks备注varchar (200)否计算机通信网络安全加密控制系统用户登录模块网络爬虫模块任务管理模块漏洞检测模块图2 系统功能模块设计示意2.1 用户登录模块设计用户登录模块在具体设计时,要做好对用户登录信息的加解密保护处理,在加解密用户登录信息时,主要用到如图3所示的数据加解密结构,利用加密密钥,将明码直接加密为乱码,对其进行传输,当数据传输结束后,利用解密密钥,对明码进行解密处理,使其还原为明码[4]。
计算机联锁车务仿真教学系统铁科模式操作手册 (2)

计算机联锁车务仿真教学系统-铁科模式操作手册〔学朝气〕北京交通高校电子信息工程学院交通信号与限制教研室交通与工业限制系统探究所2007.9书目第一局部计算机联锁车务仿真培训系统简介 (2)一.开发说明 (2)二.系统的体系构造 (2)三.功能说明 (2)四.适用对象 (3)五.系统的硬件要求 (3)六.功能扩展说明 (3)其次局部计算机联锁车务仿真教学系统学员机操作说明 (4)1.学员机操作界面 (4)1.1 屏幕显示及其含义 (4)轨道区段 (4)道岔 (4)信号 (5)绝缘节 (5)操作信息提示 (6)功能按钮及其用途 (6)1.2 站场构造 (7)1.3 按钮操作区及有效操作方式 (8)功能按钮区 (8)信号按钮区 (8)道岔按钮区 (9)2.操作方法 .............................................................................................................................. 错误!未定义书签。
2.1 操作原那么 ........................................................................................................ 错误!未定义书签。
2.2 列车作业操作 .................................................................................................... 错误!未定义书签。
2.3 调车作业操作 .................................................................................................... 错误!未定义书签。
易福门CAN通讯设计教程
易福门CAN通讯设计教程CAN通讯的四个关键概念(1)COBID(2)SDO(3)PDO(4)ODIFM设备应用层的CAN网络设计有两种模式:●MASTER-MASTER-----MASTER●MASTER-SLA VE-----SLA VE一:主-主的设计模式在IFM设备应用层的CAN通讯设计可以采用,控制器均为主控制器的设计模式例如:一个CR0200控制器与一个或几个CR0020控制器组成的“MASTER-MASTER”网络。
a)CR0200建立CAN节点,见图表1图表 1b)建立“CAN发送网络变量”与“CAN接收网络变量”。
具体参见“CANMASTER通讯设计教程”c)CR0020建立CAN节点,见图表2图表 2建立“CAN发送网络变量”与“CAN接收网络变量”。
具体参见“CANMASTER通讯设计教程”d)同样可以以上述方式来添加别的CAN(master)节点。
在这样的CAN网络结构中,各个CAN控制器的网络地位是对等的。
其数据传输的本质应该是系统共享网络变量????二:主-从的设计模式:一个控制器为主节点,其余的控制器与I/O扩展模块均为从节点。
例如一个CAN网络:CAN主节点:CR0200;CAN从节点:CR0200,CR2032,CR2032,CR0020a)设置CAN主节点图表 3b)设置CAN从节点,建立的新“SLA VE”软件见“图表4”第一步:打开相应的控制器的“SLA VE”模式程序模板,建立新的应用的软件,例如:从控制器为CR0200,则打开CR0200的“SLA VE”模式软件;如果控制器为CR0020则打开CR0020的“SLA VE”模式程序模板,并建立相应软件。
保存。
图表 4第二步:打开“资源”栏的“PLC配置”,进行相应配置,配置界面见“图表5”。
图表 5第三步:设置生成“EDS”文件,见“图表6”图表 6给“生成EDS文件”打上“√”,并添加EDS 文件名,然后点击浏览。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 0 0 0 8 1 北 京
.
I
墨
. j
联 锁 系 统
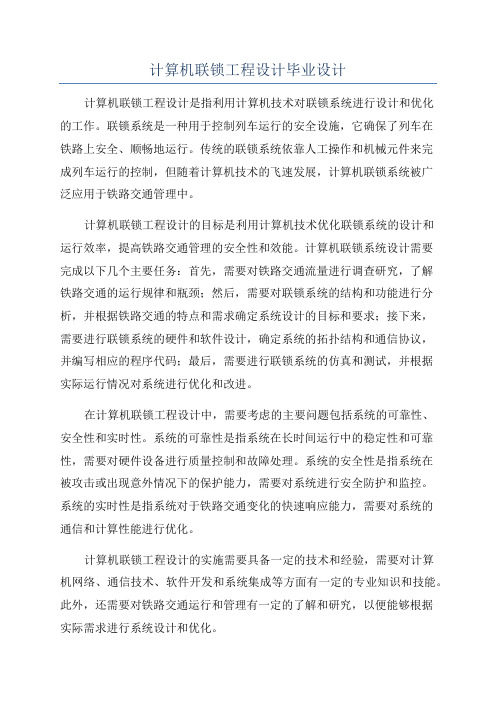
图 1 系统 结 构 图
助 理研究员
助 理研究员
姚 亚平 :中国铁道科学研 究院通 信信号研 究所
1 0 0 0 8 1 北 京
1 .操 作显示 层 ,为进 行仿 真 联 锁试 验 的人 员
提供人 机交互 接 口。试验人 员通过 操作 显示界 面完 成 联锁 系统 I / O仿 真条件 的预 置和人 机交互控 制信 息 的配 置 ,并 生成站 场信 息的实 时显示 界面 。
系统设 计 满足联锁软 件 试验要 求 ,能够健全联 锁软 件试验 覆盖 面和提 高试验 效率பைடு நூலகம்。
关键 词 :计 算机联锁 ;C A N通信 ;I O仿真 系统
Ab s t r a c t : Ba s e d o n t h e a r c h i t e c t u r e o f CI a n d c o mb i ne d wi t h t h e e x p e r i e n c e i n u s i n g c o mp u t e r t e c h n o l o —
g Y a n d c o mmu n i c a t i o n i n t e r f a c e t e c h n o l o g y,a CI I O s i mu l a t i o n s y s t e m b a s e d o n CAN c o mmu n i c a t i o n a r e d e v e l o p e d t o i mp r o v e t he t e s t o f i nt e r l o c k i n g s o f t wa r e.Th e a r c h i t e c t u r e,t h e d e s i g n p r i n c i p l e o f i t s s o f t - wa r e a nd t h e h a r d wa r e a s we l l a s t h e i mp l e me n t a t i o n o f t h e ma i n f u n c t i o n s a r e f ul l y d e s c r i b e d.Th e f u n c — t i o n t e s t i n g a n d t h e s i mu l a t i o n d e mo n s t r a t e s t h a t t h e s y s t e m d e s i g n me e t s t h e r e q u i r e me n t s o f i n t e r l o c k i ng s o f t wa r e t e s t i ng wi t h b e t t e r c o v e r a g e a n d e f f i c i e n c y o f t e s t i ng . Ke y wo r d s: Co mp u t e r i n t e r l o c k i n g;CAN c o mmu n i c a t i o n;I O s i mu l a t i o n s y s t e m
目前 ,计算 机联 锁 系 统 已在 铁 路上 广 泛使 用 , 联锁 软件 的正确 与否直接 关 系着 行 车安全 和铁路运
层 、C A N通信 接 口层 3大 部 分 组 成 。系 统 结 构 如
图 1 所示 。
营效率 。在 确保 可靠性 和安全性 的前 提下 ,对 计算
机联锁 系 统 软件 功能 与性 能 的正 确 性 验 证 尤 为重 要 ,在实 际使用前 需对联 锁软件 进行 全面 、彻底地
2 0 1 3 年 1 1 月 第4 9卷 第1 1 期
铁 道 通 信 信 号
R AI L WAY S I G AL U NG & C 0 MMUN I C ATI ON
No v e mb e r 2 0 1 3
Vo 1 . 4 9 Nn 1 1
基于 C A N通 信 的计 算机 联 锁 I O 仿 真 系统设 计
面和试 验效 率 。
…
人机 交互 信息 处 理
l o 仿真 信息
处 理
CAN 通信 信息 处 理
一
一
一
一
一
一
一
一
-
双 口CA N通 信 模 块
1 I O 仿 真 系统 结构
基于 C A N通信 的计 算机 联锁 1 0仿真 系统 采用 分层 结构 ,主 要 由操 作 显 示 层 、I O 仿 真 逻辑 运 算
齐 志 华
摘
姚 亚平
高 术 强
要 :以计算机联 锁 系统体 系结构 为基础 ,结合健 全和 完善联 锁软件 试验 的设计理 念 ,借 鉴现
有成 熟的计 算机技 术及 通信 接 口技 术 ,研 发 设 计 了一 种 基 于 C A N通信 的 计 算机 联 锁 I O仿 真 系
统 。详细 阐述 了 系统 的架构 、软 硬件 设计原 理及 主要 功 能 实现 。功 能测试 和 仿 真应 用 实践表 明 ,
一 一 一 一 一 一
回 萎
‘
一 一 一 一 一 .
联锁仿 真试 验 。
为此 ,以计算 机联锁 系统架 构 和应 用 环境为基 础 ,根据联 锁软 件仿真试 验 的各 项需 求 ,设 计一种 基于 C A N通信 的计算 机联锁 I O仿 真系统 。该 系统
已在 百余个 站场 的计算机 联锁 系统仿 真试验 中得到 运用 ,能够 有效 提高现 阶段计算 机联锁 试验 的覆盖