平衡吊(中文版)
机械手中英文对照外文翻译文献
机械手中英文对照外文翻译文献机械手机械手是近几十年发展起来的一种高科技自动化生产设备。
作为工业机器人的一个重要分支,机械手可通过编程来完成各种预期的作业任务,并兼有人和机器各自的优点,尤其体现了人的智能和适应性。
机械手作业的准确性和各种环境中完成作业的能力,在国民经济各领域有着广阔的发展前景。
随着工业自动化的发展,数控加工中心在减轻工人劳动强度的同时,提高了劳动生产率。
然而,数控加工中常见的上下料工序,通常仍采用人工操作或传统继电器控制的半自动化装置。
前者费时费工、效率低,后者则存在可靠性差、故障多、维修困难等问题。
因此,可编程序控制器PLC控制的上下料机械手控制系统成为了一种更为优越的选择,它具有动作简便、线路设计合理、抗干扰能力强和可靠性高等优点,可以保证系统运行的稳定性,降低维修率,提高工作效率。
机械手技术涉及到力学、机械学、电气液压技术、自动控制技术、传感器技术和计算机技术等科学领域,是一门跨学科综合技术。
一、工业机械手的概述机械手是一种能自动化定位控制并可重新编程序以变动的多功能机器,它有多个自由度,可用来搬运物体以完成在各个不同环境中工作。
在中国,尽管塑料制品行业仍属于劳动力密集型,但机械手的使用已经越来越普及。
那些设在中国的欧美跨国公司很早就在工厂中引进了自动化生产。
但现在的变化是分布在工业密集的华南、华东沿海地区的中国本土塑料加工厂也开始对机械手表现出越来越浓厚的兴趣,因为他们要面对工人流失率高,以及为工人交工伤费带来的挑战。
随着我国工业生产的飞跃发展,特别是改革开发以后,自动化程度的迅速提高,实现工件的装卸、转向、输送或操作钎焊、喷枪、扳手等工具进行加工、装配等作业自化,已愈来愈引起我们重视。
机械手是模仿着人手的部分动作,按给定的程序、轨迹和要求实现自动抓取、搬运或操作的自动机械装置。
在现实生活中,加工零件装料的过程繁琐,劳动生产率不高,生产成本大,有时还会发生人为事故,导致加工者受伤。
平衡吊维修手册中文版
SERVICE MANUALService Instructions For SERIES ZA,EA,BA Version 2.0安全操作规程本操作手册为用户安全地装配、使用及正确的保养提供很重要的信息。
即使您对本产品或类似产品很熟悉,在操纵本产品前,仍然应仔细阅读。
安全警告标记若用户未遵守手册中的步骤或程序,将可能受伤。
以下的警告符号用以区分不同程度的潜在危险。
危险!用于提示若违反该操作规程,会导致严重伤亡或性质严重的破坏。
警告!用于提示若违反该操作规程,可能会引起严重的伤亡或破坏。
注意!用于提示若违反该操作规程,可能会引起受伤或性质严重的破坏。
备注:在安装,操作及保养中应该注意的事项,是重要说明但与危险无关。
安全条例美国国家安全委员会,工业操作事故防范手册第八版及其它安全条例都指明:在悬挂的负载附近工作或协助吊装或卸货的工作人员应避免站在悬挂的负载下。
从安全角度考虑:以远离悬挂重物这种工作方式指导吊装操作,万一设备发生故障,将不会发生人员伤亡事故。
这一是非常点重要的。
OSHA 条例(1970)认定事故责任通常在于物主或操作人员,而非制造商。
OSHA 条例更侧重于最终安装的要求而非产品。
特别对于特殊的应用,其选型应由物主或使用者确定。
我们建议使用者查阅国家相关规范。
操作前阅读所有操作说明及保修条例。
索具:操作者应熟悉索具使用常识、安全常识及应用技术。
该手册是英格索兰公司提供给销售商,机械师,操作者及公司个人有关安装、操作、保养、维修等方面的说明。
对于机械师,操作者来说熟悉本产品及类似产品的操作规程,具备健康的体力来实施该程序是非常重要的。
操纵者应具备以下的一般性工作能力。
1、能正确和安全地使用一般机械工具,包括英格索兰所建议或专门的工具。
2、了解工业规范所承认的安全程序,防护知识和工作方式。
英格索兰公司不可能知道,也不能够提供所有的产品的操作规程及维修程序,及其危害性或者其实施后果。
若操作或维修的程序并非制造商专门要求的,这些操作就不会引起危险.若对操作或维修的程序不能确定的,应将本产品置于安全的位置,并与监督者或工厂技术人员联系。
平衡吊具的应用解析
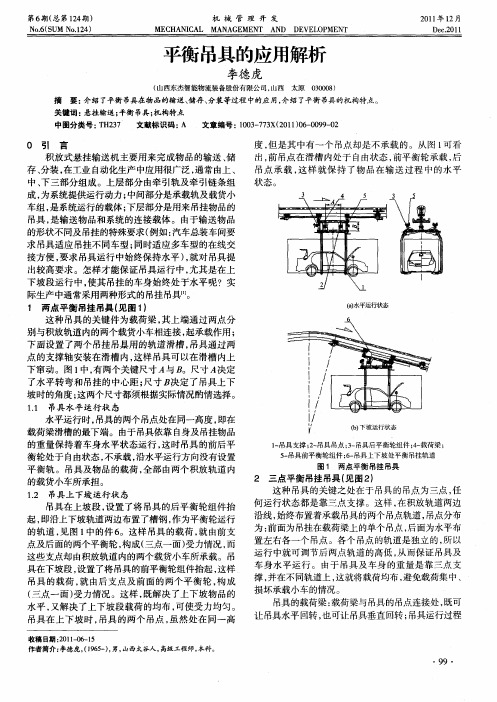
何运行状态都是靠三点支撑 。这样 , 在积放轨道两边 沿 线 , 终 布置着 承载 吊具 的两 个 吊点轨 道 , 始 吊点 分 布 为 : 面为 吊挂 在载荷 梁 上 的单 个 吊点 , 面为水 平 布 前 后 置 左 右各 一 个 吊点 。各个 吊点 的轨 道 是独 立 的 , 以 所 运行 中就可调节后两点轨道 的高低 , 从而保证 吊具及 车身水平运行 。由于吊具及车身 的重量是靠三点支 撑 , 在不 同轨 道上 , 并 这就 将载 荷均 布 , 免载荷 集 中 、 避 损坏承载小车的情况 。 吊具的载荷梁 : 载荷梁与 吊具的吊点连接处 , 既可 让 吊具水平 回转 , 也可让 吊具垂直回转 ; 吊具运行过程
【 冯博琴 . 3 】 微型计算机原理与接 F技术【 】 I M . : 大学 出 北京 清华 版社 ,0 2 20 . 【] 阎 石 . 4 4 数字 电子技术基础『 】 4版. M. 第 北京 p ia i n o eAp l to f c CM OS Ch p o i f CL7 3 n t eTe e a u eCo to y t m I 1 5 I mp r t r n r l se h S
( 上接 第 9 页 ) 8
参考文献
【】 刘海成.V l A R单片机原 理及 测控工程应用[ 】 京 : M. 北 北京航 空航天大学 出版社 ,0 8 20 . 【] 杨 元挺 . 2 电子 技术 技 能 实 ̄I . J[ 北京 : 等 教育 出版社 , lM] 高
20 . 0 4
第 6l( , 总第 14 ) l  ̄ 2期
N .( U N . 4 o6 S M o 1 ) 2
机 械 管 理 开 发
气动平衡吊操作手册(中文)最新版
1.2.4 操作
警告
- 请不要提升重量超过最大负载的工件; ※ 最大负载标记在气动平衡吊本体上; - 请不要站在吊装的工件上; - 请不要使用气动平衡吊输送人员; - 请不要站在吊装工件的下方,并离开操作区域以免受伤; - 请不要把手或脚放在吊装工件下方或中间; - 如果有其它人员在气动平衡吊操作范围内,请不要使用气动平衡吊,以免伤到他人; - 在移动气动平衡吊前请确认没有任何物体在吊装工件移动方向上; - 请不要在他人头上移动吊装工件; - 请不要让工件悬挂在空中过长时间; - 在操作过程中请密切注意工件; - 在移动过程中,请不要随意晃动工件或挂钩; - 在钢丝绳拉紧的状态下,请不要把工件卸下; - 不要使用急停系统来随意停止上升或下降,急停用于避免提升速度过快; - 在移动过程中,请不要把工件拉成斜角; - 如果挂钩不在工件重心上方,请不要提升工件; ※ 在提升前,请确保挂钩挂在工件重心上; - 请不要让钢丝绳接触有锋利边缘的结构; - 请不要提升固定的工件; - 请不要翻转吊挂工件; - 在使用前,请检查升降按钮控制; - 如果升降按钮使用不顺畅,请不要操作气动平衡吊; - 如果升降按钮方向和标识的相反,请立即停止使用; - 如果有损害或不正常声音、振动产生,请立即停止使用气动平衡吊; - 在钢丝绳出现以下情况下请不要使用气动平衡吊:
气动平衡吊
KAB-系列
安装 操作 维修
手册
注意
请不要使用气动平衡吊来提升人或动物; 在安装、操作、维修气动平衡吊前请阅读此手册; 请保证此手册随时可以拿到。
安全警告符号和标识
请仔细阅读并按照以下指示进行。 安全警告符号( ),表示警告、小心和注意
此安全警告符号用于对于可能会对使用者或其它人员造成伤害的操作进行提醒, 请仔细阅读并按照以下要求进行。
韩国DONG SUNG气动平衡吊使用原理指南-ppt

1
1 1 1 2 2 4 1 1 1
11
12 13 14 15 16 17 18 19
BH-000-3011
BH-000-3012 BH-000-3013 BH-000-3014 BH-000-3015 BH-000-3016 BH-000-3017 BH-000-3018 BH-000-3019
保护圈
8.2 全行程平衡吊
尾声
操作出现混乱 空气中含有水分、油雾、和灰 选用过滤精度达到5µm的过滤器 尘等
上升/下降速度调整 通过按钮按力大小来控制上升/下降速度,同时还可以通过调整螺栓高低 来设定最大速度。 • • • 使用5mm的内六角扳手通过按钮上的孔来旋转螺栓; 顺时针旋转则速度增加,因为调整螺栓下降了,而按钮接触的线轴增长了; 逆时针旋转则恰恰相反。
2.选型方法
标准系列 R系列 T系列 TR系列
单钢丝绳平衡吊(标准)
型号 BH06020 BH10020 BH11036 BH16020 BH20030 BH28020
最大负载(KG) 提升高度(mm) 净重(KG) 60 100 110 160 200 280 2000 2000 3600 2000 3000 2000 25 37 45 45 54 64
45Kg,那么我们建议选则BH10020(额定载荷100Kg)。
2)、组合式气动平衡吊选型要考虑到重量和提升高度,在满足提升高 度情况下尽量选择单平衡吊滑轮组形式,这样价格低而且易于操作。
3)、标准的气动平衡吊钢丝绳长度为4米,如果客户安装高度高于4米,
则请在选型时标注钢丝绳需要加长多少米。一般加长型为6米/根。 4)、气动平衡吊的控制手柄连接气管有2种形式:一是螺旋气管形式, 适合有tooling的场合以及控制手柄高度需要可以调整的场合;二是
平衡吊的结构设计说明书大学学位论文

毕业设计说明书G RADUATE D ESIGN设计题目:平衡吊的结构设计学生姓名周殿斐专业班级: 09机械5学院:万方科技学院指导教师:李延锋摘要在工厂车间里搬运重物,往往都是采用起重机、电葫芦、工业机械手等。
但对于需要频繁吊装、作业时间短的场合,如机床上下工件,装配工作吊装零部件,流水线上的定点工作等等;对于要求比较精确定位的场合,如铸造中的下芯、合箱等等,一般起重设备常不适用,工业机械手多用于生产自动线上或单一的重复操作,而且成本较高,目前,一般车间使用较少。
近年来,出现的一种新型的定点起重设备“平衡吊”,适用于几十到几百千克工件的定点频繁吊运,在工业生产中起到了极其重要的作用,平衡吊的结构简单,操作灵活,吊重后除能作上下升降外,能在水平面内作360度回转运动,只需要轻轻推拉,就可使吊物随时稳稳地停留在意欲停留的位置上,做到随遇平衡。
本文阐述了平衡吊的基本原理,并对其平衡条件及杆系的平衡方法进行了分析和研究,对平衡吊的结构进行了设计计算。
关键词:平衡吊;原理应用;力学分析;结构设计AbstractTransports the heavy item in the factory workshop, often all is uses the hoist crane, the telpher, the industry manipulator and so on. But regarding needs the frequent hoisting, the work time short situation, like about engine bed work piece, installation work hoisting spare part, in assembly line fixed-point work and so on; Regarding the request quite pinpointing situation, like in the casting under core, gathers box and so on, the general hoisting equipments are not often suitable, the industry manipulator uses in producing from the generatrix in or the sole repetition operation, moreover the cost is high, the general workshop use are at present few. In recent years, appeared one kind of new fixed point hoisting equipment “the balance hung”, was suitable in lifts frequently several dozens to several hundred kilogram work piece fixed points, played the extremely vital role in the industrial production, the structure which the balance hung has been simple, the operation was nimble about, after the crane besides could do rises and falls, could make 360 degree gyroscopic motions in the horizontal plane, only needed gently on rollers, might cause to hang the thing steadily to pause as necessary in the position which cared for to pause, achieved the indifferent equilibrium. This article elaborated the balance hangs the basic principle, and has carried on the analysis and the research to its equilibrium condition and the pole department's balanced method, hung the structure to the balance to carry on the design calculation.Key Words:The balance hangs,Principle application,Mechanics analysis,Structural design目录1 平衡吊的工作原理及平衡条件 (3)1.1 平衡吊的结构和工作原理 (3)1.2 平衡吊的平衡条件 (4)2 平衡吊的运动分析 (8)3 平衡吊的结构尺寸设计 (11)3.1 工作条件的确定 (11)3.2 滚道C和丝杠螺母A的位置尺寸的确定 (11)3.2.1 丝杠螺母A的上下极限位置的确定 (11)3.2.2 滚轮C的左右极限位置的确定 (12)3.3 初定各杆长度 (13)3.4 不计自重时,各杆截面尺寸的设计 (14)3.4.1 FED杆截面尺寸的设计 (14)3.4.2 ABD杆截面尺寸的设计 (17)3.4.3 EC杆和BC杆截面尺寸的设计 (20)4 杆件自重对平衡的影响及其平衡办法 (22)4.1 各杆件自重在C点处引起的失衡力的大小 (22)4.2 消除各杆自重引起的失衡措施 (26)4.3 估算各杆质量,计算配重 (27)4.3.1 各杆质量的估算 (27)4.3.2 用质量代换法计算配重 (28)5 平衡吊传动部分的设计 (31)5.1 滚珠丝杠副的选择 (31)5.2 电动机的选择 (37)5.3 减速器的选择 (41)5.4 联轴器的选择 (43)6 平衡吊回转机构的设计 (46)6.1滚动轴承的类型的选择 (46)6.2角接触球轴承和推力球轴承的型号选择 (47)6.3回转机构的结构图 (49)7 平衡吊各铰链处的设计 (50)结论 (52)参考文献 (53)谢辞 (54)1 平衡吊的工作原理及平衡条件1.1 平衡吊的结构和工作原理平衡吊的结构如图1所示,主要分为传动、杆系和回转机构三个部分。
平衡吊

平衡吊是一种以平衡杆系为主要结构特征的吊运装置。采用伺服传动系统的平衡吊则称为伺服平衡吊。该吊运装置主要由立柱、头架、手臂及传动部分组成,结构紧凑,造型美观。其主要特点是运用杆系的平衡原理和放大尺原理,操作者只需用几公斤力,就能使几十至上千公斤的重物在上下、前后、水平廻转三维空间轻巧自如地吊装,且运行可靠,是生产线、机床等设备工件上、下料的理想吊运装置。它的成功研制,填补了我国一项空白,属国内首创。
只要杆系中各杆满足上述关系,平衡吊即可在理想条件下,吊钩(重物)处在水平的任意位置上达到随遇平衡。因为这是理想条件下的关系式,叫做原型平衡条件。实际设计中,常取l1=l3,l2=l4。原型平衡条件下还有一个有趣的几何关系,即A,C,F位于一直线上。
实际的平衡吊要复杂得多,因为杆件都有重量,存在变形,加工后尺寸会有误差,摩擦处处存在,设计制造出的ABD和DEF杆的自重重心不能保证在轴线上等。要使实际的平衡吊真正在工程中得到应用,做到随遇平衡,这些问题应该予以逐个解决。
自1974年第一合100公斤机械式平衡吊研制成功后,为平衡吊系列化产品开发打下了良好的理论计算和实际制作基础,从70年代中到80年代初,先后完成含盖以机械、液压、气动为传动方式,额定吊运载荷为50、100、200、300、500、800、1000公斤的平衡吊系列产品及其派生产品,并形成批量生产。
当然,在平衡吊的研究设计中,应用力学知识还解决了许多问题,从而可以看到它在工程中应用的巧妙了。
在杆系的A,C处置两个滚轮,安放在传动箱的垂直和水平导槽内,电机通过传动使A轮升降,达到重物升降的动作。电机不工作时,A轮可以视为不动,犹如一个固定铰链,此时杆系如图2所示。先将杆系的杆件理想化为刚体,自重不计,尺寸无误差,各节点处摩擦不考虑。
平衡吊说明书

第一章绪论研究内容的现状平衡吊是车间内一种新型的机械化吊运工具,适用于几十千克至数百千克重的工件的高效率吊运,并可保证其准确地定位安置。
平衡吊主要作为工序间的工件起吊运输,如:砂箱、铸件及型芯的输送、下芯和合箱等,专门是中小批量多品种生产条件下,是较为理想的吊运工具。
由于平衡吊操作灵活、直观性好、结构简单、制造方便。
目前,在国内已有起重量别离为50千克、100千克和300千克的电动原型平衡吊,并初步形成一个系列[]1。
由于动力源与传动结构的组合方式不同,目前国内已经有以下几种类型的平衡吊。
如图。
图平衡吊选题意义平衡吊是一种新型机械化吊运设备。
它具有结构简单、操作灵活、制造方便,高效率、高精度等长处。
在过去的工厂中都采用吊车,电葫芦来实现,采用吊车,电葫芦不仅移动起来不便利而且占用空间也大,并且很难在生产线中采用。
随着社会的进步,生产线慢慢成了工厂的主要组成部份,为了知足在生产线中能灵活自如的搬运工件而且占地面积小。
人们就开始研究起各类起吊、搬移灵活、运动靠得住的搬运工具。
最终平衡吊问世。
由于平衡吊的问世使生产线加倍紧凑,节省空间,为以后进展做好了基础。
其主要特点是运用杆系的平衡原理和放大尺原理,操作者只需用几千克力,就可以使几十至上千千克的重物在上下、前后、水平廻转三维空间轻巧自如地吊装,且运行靠得住,便成了生产线、机床等设备工件上、下料的理想吊运装置。
作为简易起重设备平衡吊利用丝杆传动代替了卷筒、制动器、钢丝绳等起升机构零部件,又巧妙地利用平行四边形四连杆机构作为平衡臂,省去了变幅驱动装置,更宝贵地是还具有随遇平衡的特点。
它比桥吊、电动葫芦等传统起重设备灵活轻便,比机械手结构简单易于推行,因此是一种减轻繁重体力劳动,实现中小件搬运机械化较为理想的吊运工具。
第二章整体方案设计总功能肯定本设计主如果为了完成工厂中零件的三维空间的搬运,为此总功能如图。
图黑箱工艺原理工件的搬运需要操作灵活、移动快速、定位准确的特点,为此选用机械式搬运。
气动平衡吊参数-概述说明以及解释
气动平衡吊参数-概述说明以及解释1.引言1.1 概述气动平衡吊是一种利用气流产生的力来实现货物的平衡和悬浮的装置。
它通过调节内部气流的压力,将货物悬浮在空中并实现平衡,从而减小了货物的重力负荷,减轻了操作人员的劳动强度。
气动平衡吊不仅具有高度的稳定性和精确的控制能力,还能快速响应操作指令,因此在各种物流、装卸和生产场景中广泛应用。
本文将对气动平衡吊的参数进行详细的探讨和分析。
通过对吊具材料、吊钩形状、压缩空气流量和压力等关键参数的研究,可以有效提高气动平衡吊的性能和使用效果。
同时,文章还将展望气动平衡吊在未来的应用前景,探究其在智能物流、自动化生产等领域的潜在发展空间。
通过本文的研究和分析,相信读者对气动平衡吊的参数有一个更全面深入的理解,并能够为实际应用提供一定的指导和参考。
最后,希望本文能够为读者深入了解气动平衡吊的参数提供一定的帮助和启示,促进相关领域的进一步研究和发展。
1.2 文章结构文章结构部分的内容应该包括对整篇文章的组织和内容安排的说明。
在本文中,首先会在引言部分对气动平衡吊的概述进行介绍,以使读者对该主题有一个基本的认识。
接下来,文章会按照逻辑顺序展开,将主要内容分为两个部分:理解气动平衡吊和气动平衡吊的参数。
第二部分"理解气动平衡吊"将会深入解释气动平衡吊的工作原理和原理,包括其基本组成部分和工作过程。
通过对气动平衡吊的了解,读者能够更好地理解和掌握本文后续关于参数的讨论。
第三部分"气动平衡吊的参数"将会详细探讨气动平衡吊的相关参数,包括吊钩负载、气动缸的力和速度、气源压力等。
对于每个参数,将会介绍其作用、影响因素以及如何进行调整和优化,以实现气动平衡吊的高效、安全和稳定工作。
最后,在结论部分,将对气动平衡吊的参数进行总结,强调其重要性和应用价值,并对其未来的应用前景进行展望。
通过对气动平衡吊参数的深入研究,期望能够为相关领域的研究和实践提供一定的指导和参考。
平衡吊安全操作规程(三篇)
平衡吊安全操作规程一、前言平衡吊是一种常见的起重设备,广泛应用于各行各业。
为了确保工作人员的安全,保护设备的正常运行,制定平衡吊安全操作规程是非常必要的。
本操作规程的目的是明确平衡吊的安全操作流程和注意事项,以及员工的责任和义务,以确保吊运作业的安全性和有效性。
二、适用范围本操作规程适用于所有使用平衡吊进行吊运作业的工作人员,包括操作人员、维护人员以及其他参与吊运作业的工作人员。
三、安全操作原则1. 维护设备的正常运行状态,确保吊运作业的安全性和有效性;2. 遵守相关安全规定和操作流程,保证吊运作业的合法性;3. 发现问题要及时报告,不允许在有故障或异常情况下进行吊运作业;4. 根据实际工作情况选择合适的吊装方法和吊具;5. 严格遵守作业现场的安全规定,确保作业场地的安全性;6. 严禁超负荷吊运和随意改变吊具结构及参数。
四、操作流程1. 操作前准备(1)检查平衡吊及吊具是否完好,是否有明显的损坏或故障;(2)检查吊运工作区域是否整洁,有无障碍物或危险物品;(3)确保工作场地的安全,有无明火、易燃物品等;(4)进行相关安全培训和考核,掌握平衡吊的操作流程和安全要求。
2. 操作过程(1)根据吊运工件的重量和尺寸,选择合适的平衡吊进行吊装;(2)根据吊运工件的特点,选择合适的吊具,确保吊运过程中工件的稳定;(3)在进行吊装前,需将工件的吊点准确无误地对准吊车的吊钩;(4)吊运期间,操作人员需尽量保持稳定的情况下进行操作,在移动或转弯时要平稳操作,避免突然加速或刹车;(5)在吊运过程中,随时观察工件和吊具的状态,如发现异常要及时报告。
3. 操作结束(1)完成吊运任务后,重新检查平衡吊及吊具的状态,确保没有损坏或故障;(2)归还吊具并妥善保管;(3)保持工作区域的整洁和安全,清理吊运过程中产生的垃圾和废料;(4)记录吊运作业的相关情况,包括工件的重量、尺寸、操作人员、时间等。
五、安全注意事项1. 禁止超负荷吊运,吊运操作人员应掌握工件的重量和最大承载能力;2. 禁止吊具上悬挂人员,吊运作业人员在吊具下方工作时要注意自身安全;3. 禁止随意改变吊具的结构和参数,如需要改动应经过专业人员评估和确认;4. 吊运作业人员应熟悉各种吊具的特点和使用方法,根据实际情况选择合适的吊具;5. 操作人员应熟悉平衡吊的工作原理和操作方法,严格按照操作规程进行操作;6. 在进行吊运作业前,需检查所有控制设备,确保各项功能正常;7. 在进行吊装操作时,吊运和停放的工件应远离人员和其他设备,确保安全;8. 在吊运过程中发现任何异常情况或故障,应立即停止吊运并报告相关人员。
平衡吊安全操作规程范文(二篇)
平衡吊安全操作规程范文平衡吊是一种常见的起重设备,在工业领域中广泛应用。
为了确保使用平衡吊的安全性,制定安全操作规程是非常必要的。
本文将从平衡吊的选型与安装、操作前的准备工作、操作过程中的注意事项以及应急措施等方面进行详细阐述,以确保平衡吊的安全使用。
一、平衡吊的选型与安装1. 选型(1)根据工作环境和工作负荷,选择适当的平衡吊类型和规格。
(2)注意平衡吊的额定载荷、工作范围和额定工作时间,确保其能够满足实际工作要求。
(3)选择具有安全保护装置的平衡吊,如限位器、过载保护器等。
2. 安装(1)选择平坦、坚固的地面进行安装,确保安装基础牢固、稳定。
(2)安装前检查设备的各个零部件是否完好无损,如有问题应及时更换或修理。
(3)正确安装吊杆、起重吊具及其他配件,确保其安全可靠。
(4)根据平衡吊的使用手册,按照要求进行电气连接。
二、操作前的准备工作1. 工作区域准备(1)清理工作区域内的障碍物和杂物,确保平衡吊的运动轨迹畅通无阻。
(2)设置相应的安全警示标志,提醒工作人员注意安全。
2. 设备检查(1)检查各个操作杆、开关、按钮等是否灵活、正常。
(2)检查平衡吊的电气系统、液压系统等部分是否正常工作。
(3)检查起重吊具和吊杆是否完好,如有磨损或损坏应及时更换以确保安全使用。
三、操作过程中的注意事项1. 操作人员要经过专业培训,了解平衡吊的操作规程和安全注意事项。
2. 在操作过程中要严格遵守以下规定:(1)严禁操作人员将阀门、开关等留在未使用状态,必须恢复到零位置。
(2)严禁超载操作,确保平衡吊在额定载荷范围内工作。
(3)严禁使用破损、变形或有缺陷的起重吊具。
(4)在操作前,检查工作区域内是否有人员在附近,确保操作过程中没有人员受伤的风险。
(5)操作人员应保持清醒状态,严禁酒后操作。
(6)悬挂物体时,应将其平稳放置,避免突然抖动或旋转。
四、应急措施1. 当出现异常情况时,操作人员应立即停止操作,并立即通知相关人员。
平衡吊参数

平衡吊参数全文共四篇示例,供读者参考第一篇示例:平衡吊是一种常见的起重设备,广泛应用于建筑工地、大型机械设备维护和安装等各种场合。
它的主要作用是在吊物体的过程中,保持吊钩和吊物的平衡,确保安全稳定地完成吊运作业。
平衡吊参数的调整对吊运操作至关重要,影响着吊物的稳定性和安全性,因此必须认真对待。
平衡吊参数应当根据具体的吊运工况和要求进行调整。
吊物的重量、形状和尺寸不同,其所需的平衡吊参数也会有所区别。
在吊运作业开始前,要对吊物的重量进行测量,并根据重量大小来选择合适的平衡吊参数。
吊物的形状和尺寸也会影响平衡吊参数的选择,因此在调整参数时要综合考虑吊物的各项特征。
平衡吊参数的调整需要根据吊钩位置和运动方向来确定。
在吊运过程中,吊钩的位置和运动方向会对平衡吊参数产生影响,必须根据实际情况进行调整。
一般来说,吊钩位于吊物的上方时,所需的平衡吊参数会有所不同,需要根据吊物的重心位置和吊钩的实际位置来确定参数值。
吊运过程中吊物的运动方向也会对平衡吊参数的调整产生影响,因此需要在实际操作中进行细致调整。
平衡吊参数的调整必须谨慎、细致、有经验。
任何一处参数的错误调整都可能导致吊运事故的发生,造成人员伤亡和财产损失。
在调整平衡吊参数时,操作人员必须具备丰富的经验和技术,熟悉各种吊运工况的特点,能够准确地判断吊物的平衡状态,合理地调整参数值。
操作人员还必须注意平衡吊设备的维护保养,确保设备的正常运行,避免参数调整出现偏差导致事故发生。
平衡吊参数的调整是吊运作业中重要的一环,直接关系到吊物的安全稳定运输。
操作人员必须严格按照要求进行参数调整,谨慎操作,确保吊运作业的顺利进行。
只有保持吊钩和吊物的平衡,才能有效地保障吊运操作的安全性和高效性。
第二篇示例:平衡吊参数,即平衡吊的参数设置,是指在吊装作业中调节吊具和吊机参数,确保起重物与吊机之间的平衡状态,并保证吊装作业顺利进行的一项重要工作。
平衡吊参数的合理设置,不仅可以提高吊装作业的效率和安全性,还可以延长吊机和吊具的使用寿命,减少故障发生的可能性。
平衡吊的设计说明书(可编辑)
平衡吊的设计说明书(可编辑)平衡吊的设计说明书目录第1章绪论 3第1.1节平衡吊的发展工程及优点 3 1.1.1平衡吊的发展过程 31.1.2 平衡吊的优点 5第1.2节平衡吊的分类及不足 6 1.2.1 平衡吊的分类 61.2.2 平衡吊的发展存在的不足 8 第1.3节平衡吊的构造及其原理 9 1.3.1 平衡吊的构造 91.3.2平衡臂的平衡原理 14第2章平衡吊的方案确定 18 第2.1节平衡吊设计及计算方案 18 第3章平衡吊的设计过程 20 第3.1节原型平衡臂的几何分析 20 第3.2节杆系与立柱的受力分析 22 3.2.1 机构简图与作业位置编号 23 3.2.2 各杆件及立柱的与强度计算的截面尺寸确定 283.2.3 杆系的变形计算 35第3.3节失衡分析及其补偿 423.3.1 平衡的条件及失衡种类 423.3.2 杆系自重失衡及其补偿 423.3.4 制造安装误差失衡 503.3.5 电算应用 51第3.4节起重电机的选择 52第3.5节吊钩的计算与校核 553.5.1 吊钩的种类和材料 553.5.2 吊钩的计算 55第4章平衡吊设计时的注意事项 59总结 60参考文献 61英文原文 63中文译文 73致谢 79第1章绪论第1.1节平衡吊的发展工程及优点1.1.1平衡吊的发展过程当前国内平街吊设计中存在的三大问题是总体设计解析化, 失衡补偿及驭动控制。
本文就前面两个问题进行论述。
首先, 推导出一套总体设计解析公式, 将总体设计从半经验阶段推进到解析化阶段, 为电算应用开辟了道路。
其次, 作者找到的新补偿机构完全补偿了杆系自重失衡。
第三, 时杆系变形失衡进行了分析,提出了补偿办法。
最后, 衬电算应用作了初步尝试。
平衡吊是一种新型机械化吊运设备。
它具有结构简单、操作灵活、制造方便、高效率、高精度等优点。
六十年代末期它在日本欧美问世以来, 得到了大力发展。
我国从七四年首次设计试制成功第一台平衡吊以来, 纷纷在各地推广应用。
气动平衡吊工作原理【范本模板】
气动平衡吊的工作原理气动平衡吊是利用重物的重力和气缸内压力达到平衡来实现将重物提升或下降的气动搬运设备.一般一个气动平衡吊会有两个平衡点,分别是重载平衡和空载平衡。
重载平衡是平衡吊上有重物时达到平衡状态,空载平衡是平衡吊上无负载时实现的平衡状态。
不管是哪种平衡状态,抓具会处于静止,这时只需一个很小的外力就能实现提升或下降重物或抓具。
利用气动平衡吊的这个原理,可以提高工作效率,降低工人劳动强度。
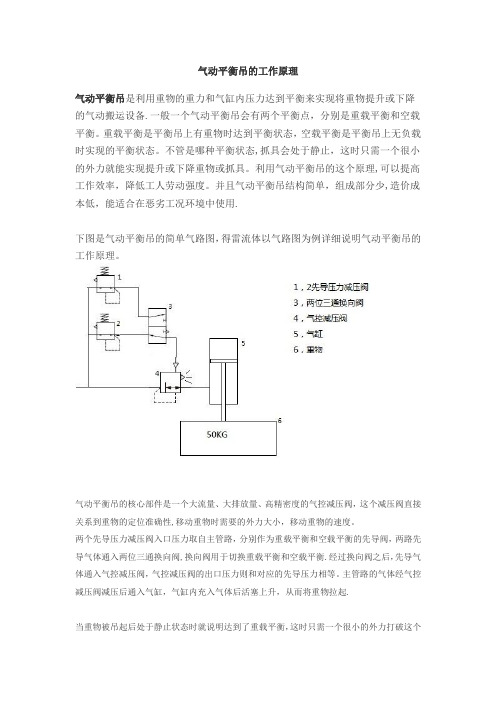
并且气动平衡吊结构简单,组成部分少,造价成本低,能适合在恶劣工况环境中使用.下图是气动平衡吊的简单气路图,得雷流体以气路图为例详细说明气动平衡吊的工作原理。
气动平衡吊的核心部件是一个大流量、大排放量、高精密度的气控减压阀,这个减压阀直接关系到重物的定位准确性,移动重物时需要的外力大小,移动重物的速度。
两个先导压力减压阀入口压力取自主管路,分别作为重载平衡和空载平衡的先导阀,两路先导气体通入两位三通换向阀,换向阀用于切换重载平衡和空载平衡.经过换向阀之后,先导气体通入气控减压阀,气控减压阀的出口压力则和对应的先导压力相等。
主管路的气体经气控减压阀减压后通入气缸,气缸内充入气体后活塞上升,从而将重物拉起.当重物被吊起后处于静止状态时就说明达到了重载平衡,这时只需一个很小的外力打破这个平衡,就能实现轻松地上提或下放重物。
以往下拉重物来打破平衡为例,当使用外力往下拉时,缸内活塞向下移动,这时缸内压力升高,超过了设定压力(这个设定压力就是平衡时的压力),多余的压力就会从气控减压阀的排放口排出。
这样一个过程的结果是:活塞(重物)下降到一定位置静止不动,缸内压力又恢复到之前的平衡压力。
反之,往上抬重物打破缸内压力平衡,也是一样的道理,只是气体一个是逆向流动(从缸内向气控减压阀的排气口流动),另一个是正向流动(气控减压阀向缸内流动).关于平衡吊气路系统的常见问题及解答:1,为什么要使用两个先导减压阀来控制一个气控减压阀,而不是只用一个大流量的减压阀直接给气缸供气?答:如果用一个手动调节的减压阀给气缸供气,减压阀出口压力只能实现一个平衡,无法在两个平衡点之间来回切换。
电动平衡吊

电动平衡吊电动平衡吊:构架、原理与应用引言电动平衡吊(Electric Balancer Crane)是一种使用电动机作为动力源,通过平衡控制系统实现悬挂物体的平衡和定位的起重设备。
在工业生产线、仓储物流等领域广泛应用,不仅提高了生产效率,还降低了工人的劳动强度。
本文将对电动平衡吊的构架、工作原理及其应用进行详细讲解。
一、构架电动平衡吊主要由电动机、减速器、传感器、平衡控制系统、悬挂装置和操作手柄等组成。
1. 电动机:电动平衡吊采用电动机作为动力源,用于驱动悬挂装置进行上下运动。
2. 减速器:减速器用于减小电动机的转速,增加驱动力矩,使吊臂上升降和悬挂物体的平衡控制更加精准。
3. 传感器:传感器是电动平衡吊的重要组成部分,用于实时感知和监控悬挂物体的状态,如重量、位置等,通过传感器采集的数据来进行平衡控制。
4. 平衡控制系统:平衡控制系统是电动平衡吊的核心,通过接收传感器采集的数据,并进行数据处理和分析,控制吊臂上升、下降和悬挂物体的平衡。
5. 悬挂装置:悬挂装置是用于悬挂和固定物体的部件,通常采用钢丝绳、链条等形式,具有一定的承载能力和稳定性。
6. 操作手柄:操作手柄是操作人员控制电动平衡吊运行的工具,可以控制吊臂的升降和移动,保证吊装作业的安全性和效率性。
二、工作原理电动平衡吊的工作原理是通过平衡控制系统实现吊臂和悬挂物体的平衡。
主要分为平衡控制和定位控制两个方面。
1. 平衡控制:平衡控制主要是根据传感器采集的数据,通过计算和分析实时重量、位置等参数,控制电动平衡吊的电机和减速器实现悬挂物体的平衡。
当悬挂物体发生偏移时,平衡控制系统会发出指令,电机和减速器会根据指令调整运行状态,使悬挂物体重新平衡。
2. 定位控制:定位控制主要是通过操纵操作手柄,控制电动平衡吊吊臂的升降和移动,实现悬挂物体的定位。
操作手柄可以控制电动平衡吊的运行速度和位置,实现吊装物体的精确定位。
三、应用领域电动平衡吊在众多领域中得到了广泛应用,下面列举几个主要的应用领域。
平衡吊技术规格
平衡吊技术规格平衡吊是一种用于起吊和移动重型或大型物体的机械设备,它可以在不倾斜或失衡的情况下进行物体的悬挂和运输。
平衡吊通常由一个或多个悬挂系统、控制系统和支撑框架组成,能够提供足够的稳定性和安全性。
在进行平衡吊操作时,需要遵循一定的技术规格和标准,以确保吊运过程的顺利和安全。
下面是一些平衡吊技术规格的详细介绍:1. 吊重能力:平衡吊的吊重能力是指其能够承受的最大重量,通常以吨为单位来表示。
吊重能力是选择平衡吊时必须考虑的一个重要因素,应根据实际需要选择合适的吊重能力。
2. 吊高范围:平衡吊的吊高范围是指它能够起吊和运输物体的高度范围。
吊高范围可以根据需要进行调整,一般来说,平衡吊的吊高范围越大,其适用范围也就越广。
3. 控制方式:平衡吊的控制方式有多种,常见的包括手动控制、遥控和自动控制等。
不同的控制方式适用于不同的作业环境和要求,选择合适的控制方式可以提高吊运效率和安全性。
4. 动力源:平衡吊通常需要动力源来提供动力驱动各个部件的运动,常见的动力源包括电力、液压和气压等。
选择合适的动力源可以确保平衡吊的运行稳定和效率高效。
5. 安全保护装置:平衡吊的安全保护装置是保障吊运安全的关键,包括限位器、过载保护器、断电保护器等。
这些安全保护装置在吊运过程中能够及时发现并处理潜在的危险因素,确保吊运过程安全可靠。
6. 检修和维护:平衡吊在长时间使用后需要进行定期检修和维护,以确保各个部件的正常运转和功能。
定期检修和维护可以延长平衡吊的使用寿命和提高其安全性。
总之,平衡吊技术规格是确保吊运作业安全和有效进行的重要因素,只有严格遵守技术规格和标准,才能有效保障吊运过程的安全和顺利进行。
在选择和使用平衡吊时,要充分考虑各种技术规格,确保吊运作业的顺利进行。
易于控制的平衡吊在生产现场的应用

易于控制的平衡吊在生产现场的应用无【期刊名称】《《汽车制造业》》【年(卷),期】2019(000)013【总页数】1页(P44-44)【关键词】平衡吊; 生产现场; 应用; 控制; 生产车间; 人机工学; 生产节拍; 综合成本【作者】无【作者单位】[1]费斯托(中国)有限公司【正文语种】中文【中图分类】TH165生产车间内的物料吊装对平衡性及人机工学的要求较高,同时也是影响生产节拍、加工效率及企业综合成本的重要因素。
Festo气伺服平衡套件适应性好,安全等级高,可较好地实现车间内的物料调转工作,提高企业生产效率。
Festo气伺服平衡吊套件YHBP易于控制的平衡吊,带来更好的人机工学体验和更高的安全性,得益于气伺服平衡吊人机工学带来工作效率的提升,使得装配车间和物流部门的员工只需动动手指,就能轻松提起和移动重物。
平衡吊的核心组件是来自 Festo 的性能强大、专业可靠的气伺服平衡吊套件 YHBP,可自动检测负载重量,安全性能等级达到 d 级,是汽车行业和包装行业的完美之选。
自适应性能该系统的最大优点是适应性,可自动检测负载重量,自行设定平衡力,即使在悬吊的状态下,也可根据重量变化进行调整。
这使得有众多派生型的生产过程具有高度灵活性。
针对每次变化具有极快的反应和评估速度,即使在最大允许负载下,操作员必须以小于10 N的力推动控制手柄,也可以轻松实现定位。
对于需要操作多个不同重量的对象,该系统的优势尤其明显,在定位期间,操作员不会感觉到负载的差异。
同时,按照人机工学设计的气动把手实现了直观控制,使得整个操作过程轻而易举。
安全为上人机工学必须时刻与机器安全同步。
该驱动解决方案拥有双通道速度监控和电源切断措施,其安全性可达到安全性能等级d级。
所有的拥塞速度和拥塞力均可以单独调整。
此外,在发生电源故障的情况下,控制系统能够确保机械手的安全关闭和重新启动。
始终确保系统处于安全状态。
即使出现电压故障或突发压降,还可检测到负载损失。
气动平衡吊参数

气动平衡吊参数
气动平衡吊是一种用于平衡物体重量和减小摩擦力的装置。
它通过利用空气动力学原理,使物体在悬挂状态下能够保持平衡。
气动平衡吊通常由吊架、气动平衡器和控制系统组成。
吊架是气动平衡吊的支撑主体,它负责悬挂物体并保持稳定。
吊架通常采用强度高、重量轻的材料制成,如铝合金或钛合金。
气动平衡器是气动平衡吊最关键的组件之一。
它利用空气动力学原理,通过控制气流的流动来平衡物体的重量。
气动平衡器内部设有气流控制装置,可以根据物体的重量和位置进行调节。
当物体受到外力作用或位置发生变化时,气动平衡器会自动调整气流的流量和方向,使物体保持平衡。
控制系统是气动平衡吊的大脑,它负责监测物体的重量和位置,并根据需要调节气动平衡器的工作状态。
控制系统通常由传感器、计算机和执行器组成。
传感器用于测量物体的重量和位置,并将数据传输给计算机。
计算机根据传感器的数据计算出气动平衡器需要调整的参数,并通过执行器控制气动平衡器的工作状态。
气动平衡吊在工业生产中起到了重要的作用。
它可以减小物体的重量感,减轻工人的劳动强度,提高生产效率。
同时,气动平衡吊还可以减小物体与地面的摩擦力,使物体在悬挂状态下更加灵活,便于操作。
气动平衡吊是一种通过利用空气动力学原理实现物体平衡的装置。
它通过吊架、气动平衡器和控制系统的协作,可以有效减小物体的重量感和摩擦力,提高工作效率。
在工业生产中,气动平衡吊发挥了重要作用,为人们的生活和工作带来了便利。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
失,从新订购一个装上,订购号可以从零件清单上查得。
安装
安装此设备之前,仔细检查可能的由运送导致的损坏。这些设备出厂时提供了充分的润滑。
平衡吊
确保设备正确安装。花一点时间在此工作上可以阻止事故发生,也可以帮助你得到最好的服务。 要保证设备要有足够的能力吊起自重加上最大额定负载,另外考虑一般因素还要加上 300%的总和 重量。
为防止不平衡负载导致滚轮损坏,设备必须处于滚轮的中间。 轨道型平衡吊安装
要合适、安全的安装设备到轨道系统中,请参考有关手册。
供气系统
气源必须干净、干燥,当设备需要吊额定负载时,气压要达到 100psi(6.9bar/690kPa),但不要 超过 100 psi。
警告 进气气压不要超过 100 psi,不要使用任何的油雾器,机油会损坏内部零件。 气管
操作规则
滚珠螺杆是固定的。它由两个头螺钉定位。端盖上的两个销钉通过滚珠螺杆末端的凹槽阻止其旋 转。卷轴总成包括卷盘、球状螺母和推力轴承,它固定在滚珠螺杆上。活塞和推力轴承接触,它 随着卷轴总成进退。活塞本身不旋转。 压缩空气驱动设备,它由外部的成套控制设备控制。空气通过后端盖上的一个小口进出活塞腔。 压缩空气导致活塞横向移动。活塞推在止推轴承上导致卷盘也随着滚珠螺杆横向移动,卷起钢缆。
5
PDF 文件使用 "pdfFactory Pro" 试用版本创建
设备剖面图
6
PDF 文件使用 "pdfFactory Pro" 试用版本创建
7
PDF 文件使用 "pdfFactory Pro" 试用版本创建
ZA,EA,BA 系列气动平衡吊
服务手册
PDF 文件使用 "pdfFactory Pro" 试用版本创建
目录
基本构造..................................................................................................................................1 安全信息..................................................................................................................................2 安装..........................................................................................................................................4 设备剖面图..............................................................................................................................6 ZA 系列设备.............................................................................................................................7 BA 系列设备...........................................................................................................................12 EA 系列设备...........................................................................................................................16 吊钩........................................................................................................................................25 吊块........................................................................................................................................26 悬吊工具................................................................................................................................28 预防性的维修检查和保养....................................................................................................35
螺钉,使空载设备慢慢上升。后退调整螺钉直到设备停止上升。
ZA 系列气路板
从设备中移除
1、 使悬挂的负载降到地面。关闭供气, 按 下 下 降 杆 使 钢 索 松 弛 。 参考 Fig.1.
2、 从气路板(1)拆下供气管(4)和 软管(5&6)。
重新组装
1、 重新装配前,彻底清洗气路板和所有的内部零 件,置换所有损坏的零件。 2、 重新装配前,往 0 形圈(8)、U 形杯(10)和 调整螺纹处抹一薄层润滑油。
情况 注意通常用于提示人们在安装、操作或维 护时要注意的信息,但并不存在危险性的
情况
安全概要
国家安全委员会“关于工业操作意外事故预防手册”(第八版)声明:在悬挂负载附近工作的的工 作人员应该遵守规定,保证不在负载的正下方工作。从安全的角度讲,有一条是非常重要的: 即 使是其中的一个设备失效,也不会造成任何伤害,所以一定要在负载正下方范围之外工作。 职业安全与卫生条例通常会追究业主而不是制造商的责任,许多条例并不关注制造商而是关注最 终的安装地点。决定产品用途的适宜性是业主的责任。在操作前请阅读所有的操作手册。 装备:小心、谨慎及熟练操作装备是操作人员的职责。
吊钩型平衡吊安装
把吊钩放置在装备结构上方,保证钩子锁死。
滚轮型平衡吊安装
当在横梁上安装装备和滚轮时,保证侧盘平行和垂直。安装之后,拉动滚轮使之带动负载通过整 个横梁。保证在操作前装好轨道刹车。在组装滚轮时要使用 5 级或更高的螺钉。
警告
4
PDF 文件使用 "pdfFactory Pro" 试用版本创建
当气源和设备的距离达到最大的 100ft(30m)时,设备进气气管内径不能小于 3/8 英寸(10mm)。在 最终联接前,所有的气管应清洗干净。供气气管应越短、越直越好。很长的传送管路及过多的使 用固定、肘、T 形槽、球阀等,由于约束和管内表面粗糙度的原因会导致气压的下降,如果使用快 速联接接头,至少要用 3/8 英寸的气管,如果小型号的接头会影响性能。
当空气从活塞腔排出时,负载或吊钩下降。
ZA 系列设备
气路板的安装 参考 Fig.1.
把设备放在一个干净、稳固的工作台上, 使后端盖垂直。卸下 ZA 控制器,保证 O 形密封圈(11)在气路板背面正确的位置。 带安装螺钉和弹簧垫圈安装气路板(1)。
控制软管的安装
控制软管是预先安装到控制手柄上的,但 必须连上气路板。 控制软管可能是灰黑色的直管或者是黄 黑色的卷管。灰色软管或者黄色管都必须 连接到气路板的下边。黑管必须连接到气 路板的上边。
危险、警告、小心和注意
如果没有履行本手册要求的操作步骤,将会导致受伤。下列标志通常用于鉴定潜在危害的等级。
危险通常用于如果忽略此警告将会导致严 重的伤害、死亡或者实质性的损害等情况
警告通常用于如果忽略此警告将可能导致 严重的伤害、死亡或者实质性的损害等情
况 小心通常用于如果忽略此警告将有可能导 致严重的伤害、死亡或者实质性的损害等
2、 去掉平衡器调整螺钉(11)和弹簧(12)。 3、 去掉活塞(9),用针头钳钳住其有凸出
安全
安全的安装和操作 ZIMMERMAN 装备决定于在工作之前你阅读、理解所有说明书的程度。
安全操作说明书
2
PDF 文件使用 "pdfFactory Pro" 试用版本创建
安全操作说明书为了使操作者认清危险的动作从而避免它们,但决不限于以下几点: 1、 只有经过安全操作培训的人才允许操作这个产品。 2、 操作人员身体必须合格。 3、 当“请勿操作”告示牌挂在设备上时,不要再对设备进行任何操作。 4、 当吊钩损坏时不要再使用设备。 5、 使用设备前要检查吊钩。 6、 在每次提升前要检查设备是否磨损和损坏。不要使用有磨损和损坏迹象的设备。 7、 不要吊升超过设备额定重量的负载。 8、 不要用多个吊钩吊同一负载。 9、 不要把你的手放在吊钩的内部。 10、不要使用钢丝绳或链锁作为一个吊索。 11、设备运作时要保证钢丝绳在负载的正上方,不要偏斜。 12、不要使用扭曲的、打结的或者损坏了钢丝绳的设备。 13、不要锤打吊钩使之到位。 14、确保负载在吊钩中的合适的位置。 15、不要用吊钩的尖端承受负载。 16、不要使用钢丝绳或链条较尖锐的边缘。 17、在设备运行中要时刻注意负载的情况。 18、确保每个人知道负载的吊升路线,不要在工作人员的正上方吊升负载。 19、不要使用此设备来升降人,也不要让任何人站在悬浮负载上。 20、不要摇晃悬浮的负载。 21、当设备不使用时不要让负载吊在半空。 22、不要让没人看守的负载留在空中。 23、不要焊接或砍断吊在空中的负载。 24、确保安全绳索被装上。 25、不要让钢丝绳或链条跳跃、噪声过大或过载发生。 26、在进行维护前要断开气源。 27、避免设备碰撞。