节点临近空间无人机平台
临近空间飞行器的分析和展望

临近空间飞行器的分析和展望作者:暂无来源:《科技创业月刊》 2016年第20期赵欣(西北工业大学航天学院陕西西安 710000)摘要:临近空间飞行器在未来的航空航天领域具有巨大发展优势,文章分析了临近空间的环境,通过各国发展的现状分析临近空间飞行器的特点和性能优势。
通过比较当今已研究出飞行器间的优缺点,并结合当前和未来发展的需要,提出临近空间飞行器的改进方向和未来展望。
关键词:临近空间;飞行器;环境;监测;特点研究中图分类号:V272文献标识码:Adoi:10.3969/j.issn.1665-2272.2016.20.008临近空间不同于航空领域和航天领域所指空间,其高度范围在20-100km之间。
临近空间区域包括大气平流层大部,中间大气层全部和热层区域的少部。
在这个空间范围中,空气动力学原理和飞行力学原理无法适用。
飞机在此空间无法正常的机动,卫星等航天器在此领域无法获得维持正常运行的速度。
临近空间空气稀薄,气流流动相对缓和,但此区域的电磁辐射等环境复杂。
长期以来,由于技术上的限制,临近空间一直被人类所忽视。
但临近空间作为一个未知的探索区域,有着得天独厚的优势。
上可入天,下可入地,可以避免多数武器的打击,又可作为空中平台对航空航天进行连接,形成空天一体化系统。
近年来,由于科技的进步和各国政府对此区域的重视提高,临近空间飞行器的研制得到广泛的关注。
现今,美国、俄罗斯、以色列和日本等国对临近空间飞行器的研制已经走到了世界前列。
1 临近空间飞行器的概念临近空间飞行器是指在临近空间飞行并执行相关任务的飞行器。
这种飞行器根据构型不同在临近空间可以完成侦查、环境监测、电子对抗、物品投送和空间打击等任务。
临近空间飞行器根据标准的不同有不同的分类。
根据其飞行动态可以分为低动态临近空间飞行器和高动态临界空间飞行器。
低动态临近空间飞行器主要包括低马赫数飞行器,例如高空气球、飞艇和高空无人机等。
此类飞行器主要依靠空间浮力进行工作。
无人机平台操作方法
无人机平台操作方法
无人机平台的操作方法主要包括以下几个步骤:
1. 准备无人机和相关设备:将无人机平台组装好,并确保电池已经充好电,无人机与控制器之间的通信也已经建立好。
2. 开启无人机:将无人机的电源打开,等待它进行初始化。
此时,无人机会自动进行校准和稳定。
3. 连接遥控器:将遥控器与无人机平台进行连接,通常是通过无线方式进行连接。
确保遥控器上的摇杆、按钮等控制元素都正常工作。
4. 启动无人机:通常是通过操作遥控器上的开关来启动无人机的电机。
在启动之前,需要确保无人机所处环境安全,远离障碍物和人群。
5. 进行飞行操作:通过遥控器上的摇杆、按钮等来控制无人机的飞行。
通常,左摇杆控制海拔和方向,右摇杆控制俯仰和偏航。
还可以进行其他操作,如悬停、拍摄照片或录制视频等。
6. 结束飞行:当需要结束飞行时,可以通过遥控器上的开关关闭无人机的电机。
然后,将无人机安全地降落,确保它稳定停在地面上。
需要注意的是,在进行操作之前,应该了解并遵守当地的飞行规定和法律,确保在合法的范围内进行飞行操作。
同时,还应该注意飞行安全,避免发生事故。
临近空间与空间作战
临近空间与空间作战摘要:空间在国家安全中具有战略地位,但其开发难度大,临近空间兼具航空空间和外层空间的诸多优点,使其在未来空间作战中具有重要作用。
文章总结了空间作战的发展历程和现代高技术局部战争中空间军事力量的实际运用,探讨了临近空间的军事应用热点问题,分析了临近空间在空间作战中的作用及二者之间关系。
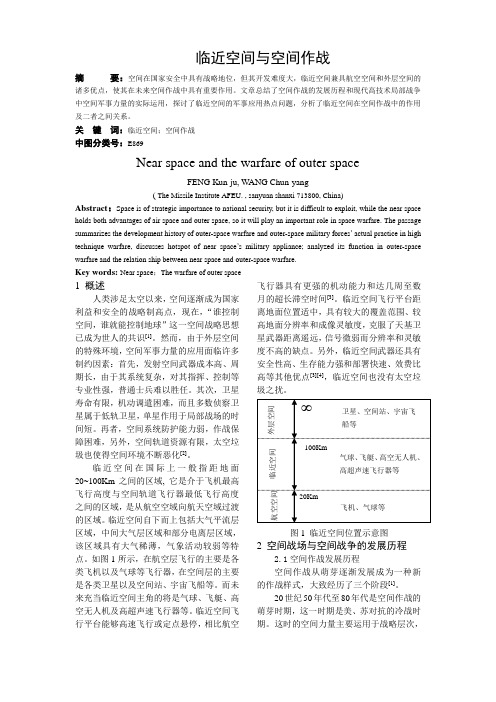
关键词:临近空间;空间作战中图分类号:E869Near space and the warfare of outer spaceFENG Kun-ju, W ANG Chun-yang( The Missile Institute AFEU. , sanyuan shanxi 713800, China)Abstract:Space is of strategic importance to national security, but it is difficult to exploit, while the near space holds both advantages of air space and outer space, so it will play an important role in space warfare. The passage summarizes the development history of outer-space warfare and outer-space military forces’ actual practice in high technique warfare, discusses hotspot of near space’s military appliance; analyzed its function in outer-space warfare and the relation ship between near space and outer-space warfare.Key words: Near space;The warfare of outer space1概述人类涉足太空以来,空间逐渐成为国家利益和安全的战略制高点,现在,“谁控制空间,谁就能控制地球”这一空间战略思想已成为世人的共识[1]。
2020年高考语文复习【语病类题】检测卷附答案解析

2020年高考语文复习【语病类题】检测卷1.下列各句中,没有语病的一句是(3分)( )A.一两百元的违法交易,有可能酿成车毁人亡的悲剧,甚至诱发几百万元的经济损失,这种现状不改变,输的不仅是个人,更是整个社会。
B.翁偶虹先生是一代戏曲名家,倾尽一生心血创作了《桃花村》,是在京剧老戏《花田错》的基础上翻新而成的艺术精品。
C.虽然理财资金在监管上并不逊于存款或自有资金,但是这部分资金是不在目前的监管禁行范畴之内的,也就是说,监管层是很难控制这种资金的流向的。
D.春节是合家团圆的节日,但对于入住养老院的老人看来,春节往往是情绪波动的敏感期,一些老人会因无法与家人团聚而闹情绪。
解析:选C A项,语序不当,应将“酿成……”与“诱发……”互换位置。
B项,中途易辙,首句主语是“翁偶虹”,末句的主语变成了《桃花村》。
D项,句式杂糅,“对于……看来”是“对于……来说”或“在……看来”两种结构的杂糅。
2.下列各句中,没有语病的一项是(3分)( )A.民政部对留守儿童进行摸底统计的初衷,是为了为进一步开展留守儿童帮扶工作创造条件,而不是让公众降低对留守儿童群体的关注。
B.全球有6 700万人患有自闭症,而在中国,这个数字是1 000万。
虽然身边有着这么多的自闭症患者,但很多人对自闭症还是一个陌生的概念。
C.长期以来,由于过度放牧、不适当的开垦和耕作、森林过度采伐及对水资源的不合理利用,致使内蒙古生态环境问题越来越多。
D.为加强对明城墙的保护,南京城墙保护管理中心表示,将首次对提供散落明城墙砖或相关线索的市民给予现金奖励,最高奖励可达2 000元。
解析:选D A项,“……的初衷,是为了……”句式杂糅,把“为了”删掉。
B项,“很多人对自闭症还是一个陌生的概念”主客体颠倒,可以改为“对于很多人来说,自闭症还是一个陌生的概念”。
C项,主语残缺,去掉“致使”即可。
3.(2018·江西六校联考)下列各句中,没有语病的一句是(3分)( )A.鉴于《不动产登记暂行条例》对普通市民比较陌生,我市相关部门加大了政策法规的宣传力度,以便顺利推进登记工作。
临界空间飞行器

临界空间飞行器一.概念临近空间飞行器是指工作于临近空间并利用临近空间独有资源和特点来执行一定任务的一类飞行器。
二.分类临近空间飞行器可以有多种分类方法。
按飞行速度,可分为高速和低速临近空间飞行器,按充气压力,可分为零压力和高压力临近空间飞行器;按推进方式,可分为自由浮空和机动飞行临近空间飞行器,按结构,可分为硬式、半硬式和软式临近空间飞行器,现在一般采用软式结构,它通过气囊中氦气的压力来保持外形等等。
三.用途美军认为,临近空间飞行器可以包括临近空间飞艇、充氦气的高空自由浮动气球、平流层高空长航时无人机、远距离遥控滑翔飞行器等多种形式。
四.应用前景由于临近空间飞行器具有可持续对同一地区进行不间断覆盖、与目标距离近等优点,因此在区域情报搜集、监视、侦察、通信中继、导航和电子战等方面具备独特的优势。
临近空间飞行器可对重点区域进行连续长时间监视和观测,有助于对战场进行准确评估;可作为电子干扰与对抗平台,对来袭飞机和导弹等目标实施电子干扰及对抗,使其偏离航线或降低命中率;可作为无线通信中继平台,提供超视距通信。
目前,美国空军为临近空间飞行器确定了多个军事应用方向,其中包括战场指挥、控制、通信、计算机、情报,监视和侦察(C41S);近实时跟踪高价值目标;空间监视(可监视卫星而基本不受天气的影响);导弹防御;自然灾害快速响应(用于移动电话网络和无线网络灾后重建)和边境控制等。
导弹防御方面,在美国新的导弹防御计划中,美国计划从西北部皮吉特湾开始的太平洋沿岸,到美国的大西洋沿岸,再到最东北的缅因州为止,至少部署10艘高空飞艇,用来监视来袭飞机、舰船和巡航导弹。
此外,美国导弹防御局正考虑在北极上空部署可控气球,用来监视和跟踪俄罗斯的导弹。
美国进行模拟仿真的结果显示:在北纬83°、36.6千米高空上部署3个气球,可连续覆盖从北极到北纬45°范围内所有的导弹发射30个这样的平台可以提供类似的全球覆盖;800个这样的平台组成的星座就可以对全球连续提供通信、情报、监视和侦察覆盖。
临近空间的特点与未来防御措施

临近空间的特点与未来防御措施临近空间的特点及未来防御措施摘要本文简要介绍了临近空间的特点,及其在此基础上发展的临近空间飞行器与其他飞行器相比存在的优势,最后介绍了临近空间在未来防御中的作用。
着重分析了基于临近空间平台针对隐身飞机及其导弹等飞行器的防御措施。
随着临近空间高超声速飞行器的发展,对高超声速目标的防御也提出了挑战,然后根据临近空间高超声速目标对防御系统预警能力时间性、高速机动目标精确探测、拦截弹机动过载和高精度制导控制等要求,阐述了预警探测系统、指挥控制系统和拦截武器系统可采取的措施。
关键字:临近空间;临近空间防御系统;飞行器1.临近空间1.1临近空间简介临近空间是指距海平面20km(接近国际公认的上限管制空域)和100km(接近国际公认的下限空间)之间的区域。
人们习惯把航天器运行的空域范围称为航天空间,一般距地面100km以上;航空器飞行的空域范围称为航空空间,一般距地面20km以下。
因此,临近空间可理解为从航空空域向航天空域的过渡区域。
临近空间大致包括大气平流层的大部分区域、中间大气层区域和部分电离层区域。
临近空间空域一直以来未得到系统的开发和利用,直到最近几年,以美国为主的个航天大国对临近空间的关注开始升温,美国空军认为,临近空间飞行器必将在未来的军事行动中发挥重要作用。
1.2临近空间的特点在平流层内,大气以水平运动为主,基本上没有上下对流现象;层内干燥,水汽、杂质很少,云雨雷电现象少见,温度几乎不变,湿度接近于零。
当高度达到40km以上时,几乎没有臭氧,使大量紫外线穿过而未被吸收,紫外线强度极高;大气在紫外线作用下开始电离,形成大量正、负离子和自由电子,其含量约为大气层平均含量的30倍,在平流层中,宇宙射线通量高,高能粒子辐射强度大。
中间层高度大约为50~80km,层内大气已经非常稀薄,在80km 高度上,空气密度只有地面的五万分之一,层内大气总量大约只占地球大气总质量的1/3000.在这样的空间区域,既可以避免目前绝大多数的地面攻击,又可以提高军事侦查和对地攻击的精度,对情报收集、真差监视、通信保障以及对空对地作战等,具有极大的发展潜力。
临近空间平台:应急通信的有效手段

()轻型 ( a 飞艇 )
重大于 空气 ,
需 借 外 力 才 能 升 空 运 行 。 利
() 重 型 ( b 飞机 )
图 2 两类临近空间平台举例
图 3( ) 利 用 飞艇 的 系统 a
4 。TW。。 6D 。 2 e Gc 。 s
专 ; 专Ⅳ‘ 家 } 谶一
一
Fo u r m
二 、临 近 空 间平 台 的概 念 和 原理
临近空 间平台又称 高空平 台.根据 国际电联 I U (1 T s.
6 A) 的 定 义 ,高 空平 台站 (h g ltd lt r 6 T eHih A tu ePaf m i o Sain,A S t o s P )是 ” 个 位 于 2 ~5 公 里 高 空 对 地 球 保 t H 一 0 0
处于 “ 白 空 .有待开发 . 这极有利于临近 空间信息平台 的
放 置
为中继进行通信 .通信距离 ( R)是平 台高度 ( 和地面 … 通信地点对平 台仰角 ( e)的函数 .可按下式进行估计 :
R E- -n( c ) =(一 S o) R ̄ e i s 0
式 中, 是交战通信点和平 台垂线与地面交点之间的距 R 离;R 是地球 的等效半径 ( 3 8 m) F =67 k 。
司承 制 . 前者翼展 3 m,有效载荷 3k .飞行高度 2 k : 7 7g 4m 后者 翼展 7 m 有效载荷 9 k ,飞行高度 3 k 5 0g 0m。在欧洲 ,
一
较 为稳定 . 据测定 . 风向大 多是 由东至西 . 或反之:且风切
变较 / 比较 理 想 的驻 留 或按 一 定规 律 巡 航 的高 空 平 台 的 J是 、
临近空间通信平台及其军事应用
对于静止卫星在传输距离 、 损耗 和时延的减小 , 使得平 台通信 系统在天线增 益、 发射 功率、 网络功 能和系统结构 等方 面有 更多 选择余地 的一些优点 。并对临近空间通信 平台的组 网进行 了分析 , 最后对于临近空间平 台在军事上的应用进行了探讨 。
关键词 : 临近 空 间 , 间 平 台 , 盖 区 域 空 覆
2 临近 空 间平 台覆 盖 区域 与链 路 损 耗
特 性分 析
临 近空 间通信 平 台 ( HAP ) S 是将 一 个 载有 大量 通 信设 备 的 HAP S飞行 器 长 时间 稳定 地 保 留在 平
小 。临 近空 间平 台与陆 、 、 天等 平 台组 网后 , 海 空、 将 进 一 步 实 现 信 息 获 取 和利 用 手 段 的多 元 化 和 一 体 化, 提高 作战 效能 , 扩大 有效作 战空 间 。
其 重要 的开发应 用价 值 引起 国际 上 的广 泛 关注 。临 近 空 间平 台具 有高移 动性 和 高数 据速 率 以及 良好 的 抗毁性 , 其通 信 不 受 地形 的 限制 , 信 覆 盖 范 围广 , 通
V o . 3 No. 1 7. 2
火 力 与 指 挥 控 制
F r o to & Co i C nrl e mma dCo to n nrl
Fe 2 2 b, 01
第3 7卷 第 2 期 21 0 2年 2月
文 章 编 号 : 0 2 0 4 ( O 2 0 — 1 30 10 —6 0 2 1 ) 20 6— 4
临近 空 间通 信 平 台及 其军 事应 用
欧 阳 向京 , 陈树 新
( 军 工 程 大学 电 讯 工 程 学 院 , 安 空 西 707) 1 0 7
临近空间长航时侦察打击一体化无人机

临近空间长航时侦察打击一体化无人机总体方案研究李军,黄海峰,牟夏,李清鹏(西北工业大学航空学院西安710072)摘要:本文结合临近空间的特点,就临近空间长航时侦察打击一体化无人机设计的关键技术、总体方案性能指标、总体方案布局选型、总体方案设计、总体方案气动结构特性、传感器载荷与攻击载荷配置、作战使用等方面进行了研究和分析。
关键词:临近空间长航时侦察打击一体化双飞翼气动结构传感器载荷攻击载荷1 临近空间特点分析1.1 临近空间的定义临近空间是指高度20—100km的区域。
临近空间既不属于航空范畴也不属于航天范畴, 它是从航空空域向航天空域过渡的区域.临近空间自下而上包括大气平流层区域、中间大气层区域和部分电离层区域。
图2.1 临近空间分层组成1.2 临近空间的特性目前所说的临近空间主要指限定在20—30km的区域。
这主要是因为超过30km后大气已极其稀薄,飞行器已经极难利用空气动力维持飞行。
目前所研究的临近空间特性也主要是指20—30km区域的空间特性.这一区域的主要特点:(1)空气稀薄;(2)暗黑的大气背景;(3)强烈的紫外辐射.1。
3 临近空间长航时无人机关键技术临近空间特有的属性对临近空间无人机的设计提出了苛刻的要求,而长航时要求又使临近空间无人机的设计面临更多严峻的挑战,主要有以下关键技术需要着重研究: (1)低雷诺数条件下的飞行器空气动力特性;(2)主动增升减阻技术;(3)大型的轻质承载结构技术;(4)先进的涡扇发动机技术;(5)主动控制技术。
2临近空间长航时侦察打击一体化无人机性能指标论证临近空间长航时侦察打击一体化无人机性能指标的确定需要综合现在以及未来一段时间(10-15年)内的军事需求、作战要求以及技术水平,并参考现有的高空长航时无人机方案,进行评估和论证。
(1)飞行高度飞行高度的确定需要着重考虑生存能力要求、侦察能力要求、动力性能限制等因素,选取25000—27000m作为待机高度。
无人机论文1500
无人机论文1500随着各国军方对无人机发展的日益重视和投入力度的加大, 世界军用无人机已经进入了加速发展的快车道。
与此同时, 先进布局、一体化设计、纳米复合材料、智能蒙皮/结构等前沿技术接连取得重大突破, 也不断推动着无人驾驶技术水平的提高。
可以预计, 未来军用无人机的发展势头必然更加迅猛, 并将呈现出以下趋势:(一)无人机平台将同时向高空长航时大型化和微小型使用灵活化两极发展一方面, 无人机要想侦察监视更广阔的地域并获得尽可能完整、无盲区的情报信息, 就必须进一步提升飞行高度、延长续航时间。
因此, 目前世界军事强国均在积极开展新型高空长航时大型无人机的研究, 这类无人机飞行高度将逐步接近临近空间, 并可在空中停留数周甚至数月时间, 非常适合于执行持久的情报收集和战场监视任务。
预计到2030年前后, 美国等国的战略战役空中侦察监视任务将主要由卫星和高空长航时无人机共同完成, 而U-2等传统有人驾驶侦察机将逐步退出历史舞台。
另一方面, 由于微小型无人机具有重量轻、体积小、造价低、隐蔽性好、机动灵活等特点, 能够监视普通侦察机探测不到的死角, 非常适合城市、丛林、山地等复杂环境以及特殊条件下的特种部队和小分队作战, 因而微小型化已成为无人机的另一重要发展趋势。
目前世界各主要国家均在大力研制各种微小型无人机。
美国不仅推出了“微星”、“龙眼”和“黑寡妇”等众多型号, 甚至还在研究将甲虫等昆虫直接改造成微型“无人机”。
(二)任务领域将不断拓展, 向多样化方向发展无人机自诞生以来, 其军事价值经历了一个不断被认识和挖掘的过程。
今后,由于技术推动和战场需求牵引两方面因素, 军用无人机的任务领域将进一步拓展, 最终将全面涉足于对地(防空压制、近距空中支援、时敏/纵深目标打击)、对海(反水面舰艇/潜艇作战)、对空(打击高价值空中目标、中远距拦截和近距格斗空战)、导弹防御(拦截弹道/巡航导弹)和网电空间(网电攻击/防御)等各个领域。
临近空间飞行器

临近空间飞行器一、临近空间飞行器的基本概念临近空间(Near space) 通常是指距地表20~100千米处的空域,其下面的空域我们通常称为“天空”,是传统航空器的主要活动空间;其上面的空域就是我们平常说的“太空”,是航天器的运行空间。
临近空间区域包括大气平流层(高度12-50千米)的大部分区域,中间大气层区域(高度50-80千米)和部分电离层区域(高度60-100千米)。
临近空间的显著特点包括:空气相对稀薄;环境压力低;环境温度变化复杂;臭氧和太阳辐射强;20-40千米区域平均风速最小。
目前“临近空间”这个词只是一个学术概念,还没有公认的“官方定义”,对其的称呼也有很多种,如“近空间”、“亚轨道”或“空天过渡区”,美国也有人称之为“横断区”,而我国学术界过去则有“亚太空”、“超高空”、“高高空”等称呼。
临近空间飞行器是指高于普通飞行器飞行空间,而低于轨道飞行器运行空间区域的飞行器,主要包括能在近空间作长期、持续飞行的低动态飞行器,和具有高动态(马赫数大于1.0)的亚轨道飞行器或在临近空间飞行的高超声速巡航飞行器。
临近空间飞行器具有航空、航天飞行器所不具有的作用,特别是在通信保障、情报收集、电子压制、预警等方面极具发展潜力。
二、临近空间飞行器的特点临近空间飞行器的应用前景十分广阔。
在民用上可以进行高空大气研究、天气预报、环境及灾害监测、交通管制监测、电信和电视服务。
在军事上可用于国界巡逻、侦察、通信中继、电子对抗等,在空间攻防和信息对抗中能发挥重要作用,进一步促进空天一体化的发展,特殊的战略位置将为未来战争开辟了一个新的战场。
其发展和应用将可能对未来整个作战体系和作战思维产生重大而深远的影响。
临近空间飞行器在应用上不同于一般的飞机和卫星,具有一些显著的特点,主要表现在以下几个方面:(1)与传统飞机相比,临近空间飞行器持续工作时间长。
传统飞机的留空时间以小时为单位,临近空间飞行器的留空时间则以天为单位,目前正在研制的临近空间平台预定留空时间长达6个月,规划中的后续平台预定留空时间可达1年以上,易于长期、不间断地获得情报和数据,可对紧急事件迅速做出响应,而且人员保障少、后勤负担轻。
临近空间目标探测分析
式飞行轨迹,平时在太空中做环绕地球的轨道飞行,需 要时可从轨道空间再入临近空间( 或从轨道空间空天 飞机平台发射对地攻击武器再入临近空间) ,可在轨 道空间、临近空间和大气层内往复飞行,图 3 是 X-37B 空天飞机示意图。
图 3 X-37B 空天飞机
图 2 通用空天飞行器( CAV)
3) 超高声速机动再入飞行器 超高声速机动再入飞行器是由外层空间再入或运 载到外层空间释放后再入大气层的飞行器,具有适应 稀薄大气 层 飞 行 的 超 高 声 速、高 升 阻 比 的 气 动 布 局。 其再入后在临近空间的稀薄大气层飞行,可以有动力 ( 火箭发动机或超燃冲压发动机) ,也可以无动力。无 动力时,依靠很高的再入速度在临近空间作超高声速 远距离的滑翔甚至波浪式的机动飞行,航程可以达上 万千米,能够实现对全球目标的快速精确打击任务。 火箭“助推 - 滑翔”式飞行轨迹是火箭助推到一 定高度和速度后再入临近空间,在临近空间无动力滑 翔 飞 行 ,飞 行 高 度 为6 0 km ~ 9 0 km ,飞 行 速 度 为 10 Mach ~ 20 Mach; 火箭“助推 - 巡航”式飞行轨迹是 火箭助推到一定高度和速度后再入临近空间,在临近 空间动力巡航飞行,巡航高度为 30 km ~ 40 km,巡航 速度为 6 Mach ~ 10 Mach; 空天飞机的轨道具有再入
结合国际空域主权的协议惯例,我国倾向于将临 近空间定义为 20 km ~ 100 km,低界选在国际民航组 织( ICAO) 控制区域之上,高界依据 FAI 定义。
1 临近空间目标简介
临近空间目标包括临近空间慢速目标和临近空间 高速目标 2 大类,临近空间慢速目标有临近空间飞艇 ( 速度一般小于 150 km / h,如美国的“海象”) 和临近 空间 慢 速 无 人 机 ( 速 度 一 般 小 于5 Mach 、1 Mach = 1 224 km / h,例如美国的“全球鹰”) ,飞行高度一般在 20 km ~ 30 km,慢速临近空间目标运动特征和常规空 中目标相似。
2020-2024年中国临近空间飞行器的分析
2020-2024年中国临近空间飞行器的分析我国平流层飞艇研发进展一、宽艇体平流层飞艇即载重样艇2018年5月28日,达天飞艇公司牵头组建的“平流层飞艇联盟”联合研发的宽艇体平流层飞艇即载重样艇在宁夏回族自治区试飞。
该次试飞的CA-T24R型飞艇是一艘缩比艇,试飞过程中,模拟起降和检验试飞共7个架次2小时,试飞取得成功。
虽然飞行时间只有短短两个小时,却在国内平流层飞艇界引起了不小的震动。
该次试飞成功的达天CA-T24R型飞艇外形采用了三囊宽体的设计。
这样的设计在静浮力基础上增加了气动升力,结合了传统飞艇技术和固定翼、旋翼机和矢量推进等技术,使飞艇的操纵特性和稳定特性得到了一定的提升。
而且,宽艇体上表面宽阔,可铺设更多的太阳能电池,有效接收太阳能辐射,转化更多电能。
其有效面积和时间都大于常规形式和英国Airlander10的飞艇。
这一设计外形是早在2003年我们与英国飞艇专家达成的共识。
同时,该飞艇的外形及气动设计完全是中国“智造”,多项创新和专利得到验证,是完全属于中国人的自主知识产权。
除了外形的变化,面对平流层飞艇的瓶颈问题,达天飞艇公司也同样提出相应解决方法,并在此次试飞过程中得到验证。
首先,他们最大限度地考虑因平流层氦温差引起体积膨胀时飞艇所能提供的最大冗余空间,并保证在平流层时压差在容许范围之内;而且,在驾驶过程中,工作人员通过改变飞艇的俯仰姿态来达到保持高度的目的,昼间操纵飞艇保持一定俯角飞行,夜间则操纵飞艇保持一定仰角飞行,宽体平流层飞艇和载重艇通过移动式配重、尾翼、全动式前翼(鸭翼)等创新性的设计,有效保持正常飞行以克服由于氦温差产生的高度变化和压力变化,达到浮重平衡。
此外,自主研发的电动机让飞艇在不同时段和不同高度面临不同风速时保持推阻平衡。
而面对能源问题,分析表示,随着科技的进步和储能电池的发展,飞艇所需电能能够得到满足。
目前,试飞成果对结构设计及制造工艺等方面存在的问题进行了很好的验证,取得了丰富的重要数据和宝贵的经验,对后期该公司改进和提高其他飞艇的性能奠定了良好的基础。
临近空间的应用
临近空间的应用临近空间飞行器特点及分类临近空间(Near space),又称“近空间”、“近太空”、“近地空间”或“空天过渡区”等,指距海平面20km(接近国际公认的上限管制空域)和100km(接近国际公认的下限空间)之间的区域。
人们习惯于把航天器运行的空域范围称为航天空间,一般在距地面100km以上:航空器飞行的空域范围称为航空空间,一般在距地面20km以下。
因此,可简单地把“临近空间”理解为:现有飞机飞行的最高高度(约20km)和卫星运行轨道的最低高度(约100km)之间的空域,大致包括平流层(18~55km)、中间层(55~85km)和部分热层(85~800km)区域。
临近空间的环境有如下特点:在平流层,大气以水平运动为主,平均速度为10m/s,层内干燥,水汽、杂质很少,云雨现象少见,温度几乎不变,湿度接近于零,适合浮空器和采用吸气式动力的飞行器平稳飞行。
在这样的空间区域,既可以避免目前绝大多数的地面攻击,又可以提高军事侦察和对地攻击的精度,对于情报收集、侦察监视、通信保障以及对空对地作战等,具有极大的发展潜力。
“临近空间”飞行器具有许多特点和特长。
未来充当临近空间主角的将是气球、飞艇、高空无人机及高超声速飞行器等。
与卫星相比:一是效费比高。
气球、飞艇等临近空间平台以氦气作为上升动力,不需要复杂昂贵的地面发射设备,其研制成本、发射成本和使用成本均比卫星低得多。
廉价的浮空器每个耗资仅1000美元,带上过载战术或战役高端的临近空间平台耗资也不过百万美元,而再简单的卫星至少要耗资5000万美元。
二是机动性好。
“临近空间”飞行器既可以简单地随风飘浮,也可以机动或悬停,具有良好的可控性。
高超声速飞行器和亚轨道飞行器,在未来战争中可达到先发制人和远程快速全球打击的目的。
三是灵敏度和分辨率高,技术难度较低,易于更新和维护。
由于可接收到卫星接收不到的低功率传输信号,所以对地观测的分辨率通常比卫星高。
与飞机相比。
临近空间太阳能无人机飞行平台的特点及发展前景
航空航天科学技术科技创新导报 Science and Technology Innovation Herald11航空空间中存在风雨雷等气候、地球重力、大气压力和日益复杂的电磁环境;航天空间则具有高真空、零重力、超低温等特征,并存在来自宇宙的各种带点粒子、宇宙射线、微流星和空间碎片等威胁。
临近空间不存在地表气候的影响,空气流动相对小,但同时也存在空气稀薄,温度变化大等情况,受电离层粒子、流星残片等影响。
早期的空天研究多针对航空航天空间的应用和讨论,随着对临近空间大气环境监测、特征分析等技术的出现,临近空间飞行器逐渐进入科研大众视野,但是由于研究起点较低,目前的临近空间飞行器仍然处于探索阶段,而一些概念机和设计理念可以指导和推动各学科技术的发展。
该文首先介绍了临近空间飞行器的不同种类,通过性能、可行性等各方面的比较,重点着眼于太阳能飞行平台的特点和前景介绍,提出结构载荷一体化概念的设想,并对相关技术进行评估和展望,最后在应用层面对太阳能无人飞行平台进行了介绍。
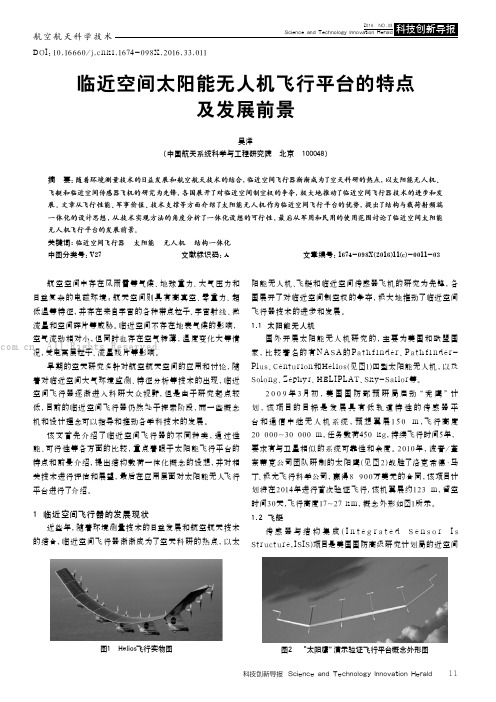
1 临近空间飞行器的发展现状近些年,随着环境测量技术的日益发展和航空航天技术的结合,临近空间飞行器渐渐成为了空天科研的热点,以太阳能无人机、飞艇和临近空间传感器飞机的研究为先锋,各国展开了对临近空间制空权的争夺,极大地推动了临近空间飞行器技术的进步和发展。
1.1 太阳能无人机国外开展太阳能无人机研究的,主要为美国和欧盟国家,比较著名的有N A S A 的P a t h f i n d e r、P a t h f i n d e r -Plu s、C ent u r ion 和Hel ios (见图1)四型太阳能无人机,以及Solong、Z ephy r、HELIPLAT、Sky-Sai lor等。
2009年3月初,美国国防部预研局启动“秃鹰”计划,该项目的目标是发展具有低轨道特性的传感器平台和通信中继无人机系统,预想翼展150 m ,飞行高度20 000~30 000 m,任务载荷450 kg,持续飞行时间5年,要求有与卫星相似的系统可靠性和余度。
临近空间飞行器
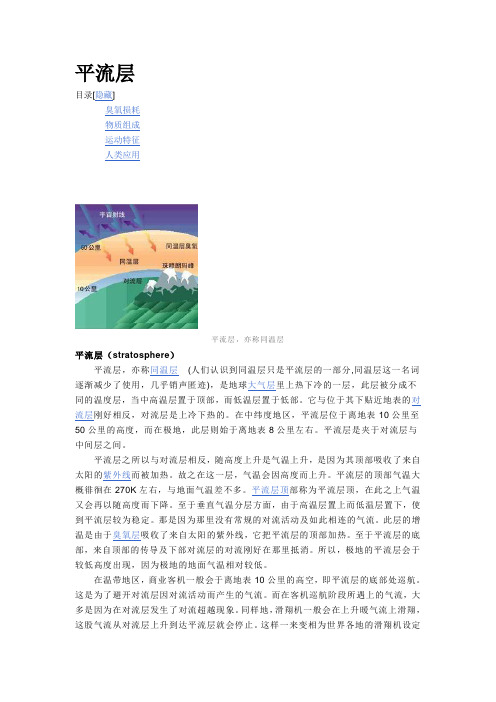
平流层目录[隐藏]臭氧损耗物质组成运动特征人类应用平流层,亦称同温层平流层(stratosphere)平流层,亦称同温层(人们认识到同温层只是平流层的一部分,同温层这一名词逐渐减少了使用,几乎销声匿迹),是地球大气层里上热下冷的一层,此层被分成不同的温度层,当中高温层置于顶部,而低温层置于低部。
它与位于其下贴近地表的对流层刚好相反,对流层是上冷下热的。
在中纬度地区,平流层位于离地表10公里至50公里的高度,而在极地,此层则始于离地表8公里左右。
平流层是夹于对流层与中间层之间。
平流层之所以与对流层相反,随高度上升是气温上升,是因为其顶部吸收了来自太阳的紫外线而被加热。
故之在这一层,气温会因高度而上升。
平流层的顶部气温大概徘徊在270K左右,与地面气温差不多。
平流层顶部称为平流层顶,在此之上气温又会再以随高度而下降。
至于垂直气温分层方面,由于高温层置上而低温层置下,使到平流层较为稳定。
那是因为那里没有常规的对流活动及如此相连的气流。
此层的增温是由于臭氧层吸收了来自太阳的紫外线,它把平流层的顶部加热。
至于平流层的底部,来自顶部的传导及下部对流层的对流刚好在那里抵消。
所以,极地的平流层会于较低高度出现,因为极地的地面气温相对较低。
在温带地区,商业客机一般会于离地表10公里的高空,即平流层的底部处巡航。
这是为了避开对流层因对流活动而产生的气流。
而在客机巡航阶段所遇上的气流,大多是因为在对流层发生了对流超越现象。
同样地,滑翔机一般会在上升暖气流上滑翔,这股气流从对流层上升到达平流层就会停止。
这样一来变相为世界各地的滑翔机设定了高度限制。
(纵然有些滑翔机会用上背风波来飞得更高,把滑翔机带到平流层之中。
)平流层是一个放射性、动力学及化学过程都会有强烈反应的区域。
因为其水平的气态成份混合比起垂直的混合都来得要快。
一个较为有趣的平流层环流特性是发生于热带地区的准双年震荡(QBO)。
这种现象由重力波引导,是由于对流层的对流而引至的。
临近空间
临近空间概述临近空间(Near space)是指距地面20~100公里的空域,由于其重要的开发应用价值而在国际上引起广泛关注。
临近空间飞行器是指只在或能在近空间作长期、持续飞行的飞行器或亚轨道飞行器或在临近空间飞行的高超声速巡航飞行器,具有航空、航天飞行器所不具有的作用,特别是在通信保障、情报收集、电子压制、预警等方面极具发展潜力。
临近空间,其下面是的空域我们通常称为“天空”,是传统航空器的主要活动空间;其上面的空域就是我们平常说的“太空”,是航天器的运行空间。
“临近空间”这个词目前只是一个学术概念,还没有公认的“官方定义”,对她的称呼也有很多种,如“近空间”、“亚轨道”或“空天过渡区”,美国也有人称之为“横断区”,而中国学术界过去则有“亚太空”、“超高空”、“高高空”等称呼。
临近空间拥有着大气平流层区域(指距地面18到55公里的空域)、大气中间层区域(指距地面55到85公里的空域)和小部分增温层区域(指距地面85到800公里的空域),纵跨非电离层和电离层(按大气被电离的状态,60公里以下为非电离层,60公里到1000公里为电离层),其绝大部分成分为均质大气(90公里以下的大气,上面的是非均质大气)。
应该是一块非常重要和有利用价值的空域。
中国关于临近空间的研究也在悄然起步。
最近,由军事科学院军队建设研究部研究员张东江博士领衔承担的“临近空间飞行器发展法律问题研究”项目在北京通过鉴定,从而填补了中国临近空间法律规范研究方面的空白。
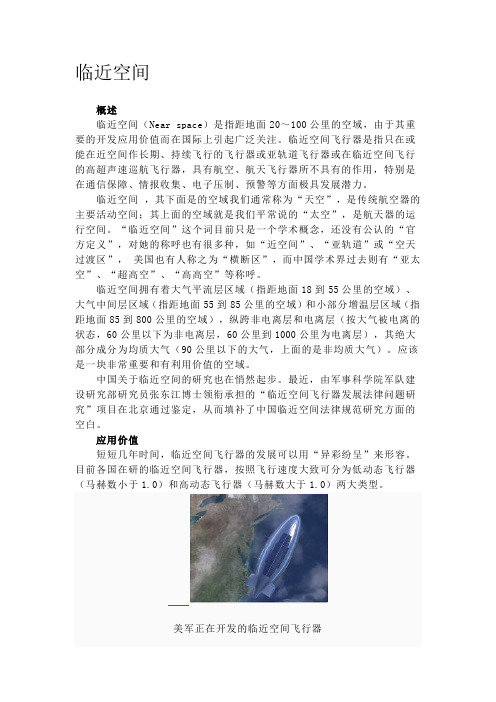
应用价值短短几年时间,临近空间飞行器的发展可以用“异彩纷呈”来形容。
目前各国在研的临近空间飞行器,按照飞行速度大致可分为低动态飞行器(马赫数小于1.0)和高动态飞行器(马赫数大于1.0)两大类型。
美军正在开发的临近空间飞行器低动态临近空间飞行器主要包括:平流层飞艇、高空气球、太阳能无人机等。
它们具有悬空时间长、载荷能力大、飞行高度高、生存能力强等特点,能够携带可见光、红外、多光谱和超光谱、雷达等信息获取载荷;可作为区域信息获取手段,用于提升战场信息感知能力,支援作战行动;又可携带各种电子对抗载荷,实现战场电磁压制和电磁打击,破坏敌方信息系统;还可携带通信及其他能源中继载荷,用于野战应急通信、通信中继及能源中继服务。
弹道导弹预警技术分析

弹道导弹预警技术分析毛艺帆张多林王路摘要弹道导弹预警作为弹道导弹防御的首要阶段,其能力直接影响整体防御效果。
介绍了弹道导弹预警,在此基础上,从光学探测技术和雷达探测技术两个方面分析了弹道导弹预警技术,对弹道导弹预警的未来发展进行了展望。
关键词弹道导弹预警红外探测紫外探测第五代雷达引言随着相关技术的发展,弹道导弹已经具备惊人的突防攻击能力。
虽然反导武器系统发展也非常迅速,但是与弹道导弹相比仍然存在一定代差。
预警系统是反导系统中首要的一环,也是决定整个反导系统探测效能的关键一环,所以预警系统的重要性不言而喻,对预警探测手段的研究更是重中之重。
1 弹道导弹预警概述弹道导弹预警是指对敌方弹道导弹发射征候和来袭情况进行侦查、探测,并发出预先警报的活动。
主要完成弹道导弹的早期发现、定位、跟踪、识别和实时报知弹道导弹动态的任务。
整个预警系统按照平台可分为地基预警系统、空基预警系统、临近空间预警系统和天基预警系统。
地基平台预警系统主要是指陆、海基预警雷达,包括大型相控阵雷达和天波超视距雷达等; 空基平台预警系统主要是指各种预警机,包括有人或无人驾驶预警机; 临近空间平台预警系统是指部署于临近空间的预警系统,包括高空浮空器、平流层飞艇、高空长航时无人机等[1]; 天基平台预警系统主要是指天基卫星预警系统。
不同平台预警系统承担着不同的预警任务,如图1 所示,在助推段,前置部署的浮空器及预警机等对导弹的发射有一定的预警作用,高轨卫星在导弹飞入云层以上之后进行有效地预警及粗跟踪; 在飞行中段,低轨卫星星座对导弹进行预警及精跟踪,同时地基天波超视距雷达可通过电离层反射进行预警探测,大型相控阵预警雷达可完成视距内的预警跟踪。
图1 弹道导弹预警示意图2 弹道导弹预警技术分析弹道导弹预警技术主要包括传感器探测技术和信息处理( 融合) 技术两方面。
传感器探测是指位于不同平台不同类型的传感器对弹道导弹进行探测预警,主要分为光学探测和雷达探测两种,其中,光学探测主要指可见光探测和不可见光探测,不可见光探测包括红外探测、紫外探测等方式。
空天车地一体化重载铁路安全保障技术框架

空天车地一体化重载铁路安全保障技术框架高一凡1,王楠楠2,吴迪迪3,陈小英1(1.北京锦鸿希电信息技术股份有限公司,北京100070;2.中国航天系统科学与工程研究院,北京100044;3.中车长春轨道客车股份有限公司,长春130062)采用日期:20200901基金项目:十三五国家重点研发计划项目先进轨道交通专项 基于空天车地信息协同的轨道交通运营与安全综合保障技术项目(2016YFB1200100)第一作者:高一凡(1978 ㊀),男,工程师,主要从事通信工程方向的研究工作㊂摘㊀要:通过分析重载铁路基础设施㊁机车及其运行环境监测的现状和迫切需求,研究建立了基于空天车地一体化的重载铁路运营与安全保障监测系统,包括静态空基监测平台㊁动态空基监测平台㊁车载监测平台及地面轨旁监测平台,详细阐述了系统的组成及其功能㊂根据重载铁路现场的典型监测需求,提出了空天车地一体化监测系统的架构设计及其各部分详细功能分析,为重载铁路系统的监测㊁重载铁路系统运行状态监测和预警服务的进一步理论和应用研究提供参考㊂关键词:空天车地;重载铁路;安全监测;技术框架中图分类号:U285.5+5㊀㊀文献标识码:A㊀㊀文章编号:16729889(2021)01008407Technical Framework of Heavy-Haul Railway Operation and Safety Guarantee Using theSpace-Air-Train-Ground Integration NetworkGAO Yifan 1,WANG Nannan 2,WU Didi 3,CHEN Xiaoying 1(1.Beijing Jinhong Xi-Dian Information Technology Corp.,Beijing 100070,China;2.China Aerospace Academy of Systems Science and Engineering,Beijing 100044,China;3.CRRC Changchun Railway Vehicles Co.,Ltd.,Changchun 130062,China)Abstract :By analyzing the current status and urgent needs of heavy-haul railway infrastructure,locomotives and their operat-ing environment monitoring,the research established a heavy-haul railway operation and safety assurance monitoring system based on the space-air-train-ground system,including static air-based monitoring platform,dynamic air-based monitoring plat-form,vehicle-mounted monitoring platform and ground track monitoring platform elaborated the system composition and func-tions in detail.Finally,according to the typical monitoring needs of the heavy-duty railway site,the architecture design and detailed functional analysis of each part of the integrated monitoring system of the sky,and the ground are proposed,which provides a reference program for the monitoring of the heavy-haul railway system.The theory and application research of pro-posed system will provide a good guide for the operation status monitoring and early warning of the railway system.Key words :space-air-train-ground;heavy-haul railway;safety monitoring;technical framework㊀㊀高效运营与安全保障是轨道交通永恒的主题㊂长期以来,我国轨道交通的高效安全运行面临着多重的压力[13],而重载铁路的快速发展更是使其在运营安全㊁运输效率㊁基础设备建设㊁维护等方面面临巨大挑战㊂重载铁路日常维护包括每日人工巡查维护㊁天窗时间内维修㊁要点维修和大修等;各专业针对运营㊁安全㊁设备维护等进行各种检测㊁监测,产生了海量的㊁结构多样的数据㊂如何有效地采集㊁管理和应用这些数据,是重载铁路高效运营和管理的基础和关键[46]㊂我国高速铁路装备的运营与安全保障系统主要有列控系统和铁路自然灾害及异物侵限监测系统㊂列控系统根据地面设备提供信号动态信息㊁线第1期高一凡,等.空天车地一体化重载铁路安全保障技术框架路参数㊁临时限速信息和动车组参数,按照目标距离连续速度控制模式监控列车运行,保证列车的运行安全[78];自然灾害及异物侵限监测系统能对铁路沿线风㊁雨㊁雪㊁地震及异物侵限等状况进行实时监测㊁预警㊁报警,并对异物和地震进行联动安全控制等[911]㊂现有关于列控信息和自然灾害信息的监测都是通过在地面布设传感器,然后将感知信息通过铁路专网或者公网传输到路网数据中心,数据中心进行数据处理和分析后,将预警信号发送给车辆段或者列车乘务员㊂该监测方式是对一个区域局部信息的感知和处理,难以实现大范围㊁全天候的实时监测,缺乏全局和宏观的决策能力[1213]㊂因此,迫切需要建设一套监测系统,突破现有铁路地面监测㊁预警㊁网络信息交换现状,实现基于空天车地信息一体化的重载铁路系统运行状态全息化感知与信息集成应用技术,满足重载铁路列车安全运行大范围㊁全天候㊁全覆盖㊁全方位实时监测需求㊂基于空天地一体化的监测系统在地球观测㊁环境监测等领域已经有初步的应用[1416],在高速铁路的熔岩勘测和山区地形测绘方面也有一定的应用基础[1719],但是尚未形成完整的㊁面向重载铁路安全监测和预警的空天车地一体化监测系统㊂本文建立的基于空天车地一体化的监测系统框架及其典型示范应用,将为未来重载铁路的安全监测提供良好的理论㊁技术和应用指导㊂1㊀系统总体方案与功能设计本文针对典型重载铁路的特点,以系统功能和指标体系为主要依据,提出重载铁路运营与安全综合保障系统综合集成体系结构㊁组成,以及各组成部分的功能㊁配置㊁外部接口等内容㊂1.1㊀系统总体功能分析目前重载铁路的日常维护工作存在两个主要问题:①一线维护人员数量较少,维护线路长,承担责任大;②行车密度大,维修时间严重不足,只能进行小修小补,线路长期处在超负荷运营之中㊂因此在综合考虑经济成本的情况下,应实现广域大范围的低成本覆盖,通过静态滞空平台(飞艇)进行覆盖的方式具备显著优势,可以解决维护线路长㊁难以全天候定区域安全监测导致的诸多难题㊂本课题要求静态滞空平台具备大载荷㊁长航时㊁高精度定区域驻空㊁立体多维态势感知㊁低成本运维等能力㊂由于一般情况下很难到达重载铁路的现场,因此动态滞空平台(无人机)的应用是解决这一问题的有效途径㊂结合重载铁路的特点,本文提出专用动态滞空平台快速部署㊁实时监测㊁操作简易㊁长航时滞空㊁远程作业㊁可靠性高等特点㊂同时,重载铁路的多源联合观测数据在空间㊁时间㊁尺度等方面呈现出多粒度形态,并存在严重的不一致性;多源传感器获得的感知数据具有歧义性和缺失性,监测对象与环境具有多态性㊁非结构性,因此,需要研究反映多尺度㊁多域状态信息的关联认知模型,提出状态信息的时空表征,获取关联融合方法,为列车本体安全状态㊁基础设施和列车运行环境的监测㊁线路等状况的快速巡检等监视应用需求奠定理论方法基础㊂另外,重载铁路的多平台监测信息存在时空维度不同㊁多元异构等特性,需要进行数据的关联融合㊂同时,轨道交通状态的生成与演化具有不确定性和跨尺度特性,需要探索不同局部运行状态的耦合机制及演化机理,建立态势的跨尺度时空映射关系模型,解决状态态势跨尺度时空演化涌现这一关键科学问题㊂重点面向轨道交通系统状态信息的融合处理方法㊁安全态势的跨尺度演化㊁多源立体监测系统状态评价与能力涌现展开研究,实现对轨道交通系统的多元㊁多维㊁多粒度的实时全息化评估,综合保障轨道交通系统安全运行;同时要求系统在突发事件㊁突发数据请求等情况下,具备应急保障能力㊂综上所述,针对重载铁路大范围实时运营与安全保障对广域立体监测㊁多尺度监测信息深度融合等的迫切需求,本文将构建空天车地一体化的状态监测与处理技术体系和标准规范,实现系统全方位㊁全息化的运营与安全综合保障能力㊂通过引入临近空间飞艇㊁低空无人机㊁列车及地面轨旁系统互联互通的专用网络系统,有效整合网络系统中空间和地面两个部分,通过专用网络将原本分散的感知监测能力连接成一体化的专用网络㊂首次通过空天车地综合组网,实现对轨道交通广域线路㊁基础设施㊁在途列车群状态的立体信息获取(看得全)㊁可信传输(传得好)与精准运管(判得准),从而满足未来轨道交通系统全息化安全保障和运营支持的需求㊂1.2㊀系统整体架构重载铁路运营与安全综合保障系统按照节点空间分布分为临近空间㊁空中㊁车载㊁地面四个层面,主要包括临近空间平台(专用静态滞空平台)㊁㊃58㊃现代交通技术2021年空基平台(专用动态滞空平台,包括翼型无人机㊁多旋翼无人机等)㊁车载监测㊁地面监测节点以及地面数据中心㊂重载铁路运营与安全综合保障系统利用分布于临近空间㊁空中㊁车载及地面的专用静态滞空平台㊁专用动态滞空平台㊁列车以及轨旁监测节点上加装的监测系统装置,结合地面既有监测系统,共同构成了系统的监测部分,提供列车本体㊁基础设施(路基㊁桥梁㊁隧道等)及运行环境监测,实现轨道交通多尺度多域状态信息的时空一致获取与关联㊂针对铁路大范围实时运营与安全综合保障对按需动态组网㊁任务应急重构㊁可靠传输等方面的需求,构建空天车地轨道交通专用网络体系构架,实现覆盖列车㊁地面基础设施及运行环境的空天车地一体化协同组网,支持面向轨道交通运营业务以及应急业务等条件下的快速组网和动态重构,具备大范围轨道交通安全监控大带宽㊁实时㊁高可靠的长距离通信传输能力㊂系统的数据分析部分通过构建大数据处理平台,运用多维度轨道交通状态信息融合和互操作技术,对多源立体感知数据进行智能分析和挖掘,实现对多元时空大样本数据的有效处理和分析利用,达到安全状态信息深度融合与整体行为的跨尺度演化涌现,从而实现轨道交通状态辨识评价㊁预测预警与风险分析㊂重载铁路运营与安全综合保障系统通过空天车地轨道交通专用网络实现各监测节点立体感知信息的可靠传输与无缝共享,结合轨道交通系统状态信息融合与处理系统对多源数据的智能分析,支撑列车运营安全全方位监控信息的实时传输与预警处理㊂2㊀系统组成部分重载铁路运营与安全综合保障系统主要由监测子系统㊁通信子系统和数据处理子系统三部分组成,其中监测和通信子系统的节点包括专用静态滞空平台节点㊁专用动态滞空平台节点㊁列车节点㊁轨旁监测节点及地面通信节点等;数据处理子系统主要是以地面数据处理中心为核心的数据处理和预测预警平台㊂各子系统通过通信设备和通信链路进行连接,共同完成空天车地一体化轨道交通系统安全保障的功能㊂重载铁路运营与安全综合保障系统主要由专用静态滞空平台㊁专用动态滞空平台㊁轨道交通系统状态信息实时获取与监测子系统㊁应急通信子系统㊁空天车地轨道交通专用网络㊁轨道交通系统状态信息融合预处理子系统以及既有监测系统组成㊂2.1㊀专用静态滞空平台本文提出的专用静态滞空平台是针对轨道交通大范围实时运营与安全综合保障系统的要求研制,具有大载荷㊁长航时㊁高精度定区域驻空三项核心能力,支持全天候定点广域覆盖,能够解决广域稀疏路网难以全天候定区域安全监测的难题,实现系统全方位㊁全息化的运营与安全综合保障能力,提供空中平台保障㊂专用静态滞空平台主要通过在飞艇平台上安装光电吊舱等遥感遥测设备,对轨道交通基础设施及运行环境的状态进行实时监测,然后将监测数据发送到地面数据中心,对基础设施及运行环境的状态进行实时诊断及预测㊂应用场景及监测对象主要包括:列车位置㊁基础设施状态(线路㊁桥梁㊁隧道的状态)㊁运行环境状态(山体滑坡㊁塌方㊁泥石流㊁水位暴涨等自然灾害;风㊁沙㊁雨㊁雪等自然环境)及异物侵限(落石㊁动物㊁车辆㊁设施㊁遗留物等)㊂2.2㊀专用动态滞空平台本文设计的专用动态滞空平台满足快速部署㊁实时监测㊁操作简易㊁长航时滞空㊁远程作业㊁可靠性高等要求,支持实现局部增强监视的业务要求㊂结合动态滞空平台的高机动性,在无人机上搭载激光雷达和视频监测系统,对轨道现场动静态异物侵限进行识别和预警;对线㊁桥㊁隧及轨旁设施等基础设施进行高机动性和高分辨率的状态获取和识别;对线㊁桥㊁隧的完整度进行实时检测和分析;对突发事故进行近距离㊁高精度探测㊂翼型无人机所搭载的遥感遥测设备的部分监控数据通过艇载基站实时转发至地面中心;隧道无人机自主飞行完成巡检任务,巡检所得数据使用专用U盘等介质通过专用网络传送或直接拷贝至地面中心;通过无人机搭载的高像素照相设备㊁红外摄像设备㊁激光雷达设备等,获取实现远距离㊁高速度和高分辨率的拍摄,并通过机载的GPS(全球定位系统)和具备实时传图功能的数据链路,将各信息采集状态的视频数据回传到地面站㊂2.3㊀车载监测辅助平台位置监测辅助平台主要通过卫星导航和惯性㊃68㊃第1期高一凡,等.空天车地一体化重载铁路安全保障技术框架导航传感器组合定位方式,实时监测列车的运行位置,其列车定位精度基本满足列车定位需求㊂轨道交通车载监测平台监测对象复杂多样,应用的场景非常丰富,本系统选择有代表性的监测对象进行分析㊂(1)列车位置监测㊂为实现空天车地环境下列车高精度连续无缝定位,采用基于卫星定位的多传感器信息融合组合技术实现列车位置的实时获取与行车监测,突破多传感器紧耦合组合定位核心算法,实现面向线桥隧等多个典型应用场景的测试示范和验证㊂(2)列车关键部件监测㊂其包括轴箱状态监测㊁齿轮箱状态监测㊁牵引电机状态监测㊁制动系统状态监测㊁辅助逆变系统状态监测㊂(3)人员状态监测(包括司机状态监测)㊂2.4㊀地面轨旁监测平台基于地面平台的轨道交通基础设施及环境监测的总体方案如图1所示㊂图1㊀基于地面平台的轨道交通基础设施及环境监测的总体方案①在轨旁安装视频监控对铁路周边移动物体进行监控与识别分析,对移动物体的类型㊁距离铁路的距离㊁分布态势㊁威胁程度进行实时分析与预警;②在重点位置安装风力风向传感设备,对可能发生大风威胁的区域进行实时监测;③在容易发生沙尘暴的地区安装沙尘覆盖监测系统进行实时监测;④在沿线重点位置安装雨量传感器;⑤在沿线重点位置安装雪深传感器,如条件允许也可和沙尘覆盖监测系统共用一套系统;⑥在桥梁㊁隧道等基础设施的重点部位安装应力传感系统㊂各传感监测系统采集原始数据,在本地进行分析预处理后,再由轨旁数据采集㊁存储与处理设备统一进行编码与集成,通过轨旁路由网关㊁无线通信终端㊁艇载无线通信基站等通信通路将数据传递至地面中心再做深入的分析处理与应用㊂2.5㊀多维度轨道交通状态信息的融合和互操作平台㊀㊀针对空天车地信息协同的轨道交通运营与安全综合保障系统所涉及的轨道交通列车车体㊁基础设施以及运行环境等设施设备种类多样㊁测量数据复杂等问题,研究这些测量数据的接入㊁归类㊁筛选㊁存储方法及数据融合㊁互操作技术,根据不同应用建立起合理的存储机制和管理办法,建立轨道交通一体化检测监测数据管理平台,多维度轨道交通状态信息的融合和互操作平台,主要包括多源信息的接入㊁存储㊁融合处理㊁交互和安全管理等多个子系统和子功能模块㊂2.6㊀基于大数据的轨道交通状态辨识评价㊁预测预警与风险分析平台㊀㊀轨道交通空天车地一体化监测系统数据格式多样,包括报表㊁文本㊁图像㊁视频㊁音频等非结构化数据㊂为了综合运用㊁挖掘分析这些潜在的数据金矿,必须将其按照特定的规则集成存储到数据库,并根据应用方式不同,构建不同的子系统,包括基于大数据的轨道交通状态辨识评价㊁预测预警与风险分析及平台研制㊂研究列车关键部件㊁列车运行状态㊁线桥隧等基础设施以及列车运行环境等故障或危险趋势分析及预测模型㊁运维辅助决策与应急处置方法,建立安全风险综合评价体系㊂其包括:①列车车体实时监测与告警平台;②基础设施实时监测与告警平台;③运行环境实时监测与告警平台;④系统自身状态实时监测与告警平台;⑤故障趋势分析及预测系统;⑥安全风险综合评估系统㊂3㊀典型应用场景本章结合朔黄铁路对于空天车地一体化系统监测的需求,使用本系统研究的技术及研制平台,对验证的场景及验证方案进行详细介绍㊂验证场景主要分为:①基于飞艇的基础设施和列车运行环境监测;②基于无人机的基础设施和列车运行环境监测;③基于轨旁设施的基础设施和列车运行环境监测;④机车运行状态监测;⑤基于地面传感器和卫星的列车位置实时监测;⑥轨道交通系统状态信息获取㊁融合与决策支持平台;⑦运营与安全综合保障的空天车地信息协同技术平台㊂空天车地一体化监测系统在朔黄铁路进行示范应用时,需要满足以下监测和预测的标准:覆盖隧道㊁桥梁㊁长大干线等典型应用场景的监测;基础设施监测有效覆盖半径ȡ300km;周边环境的典型自然灾害具有大范围监测能力ȡ100km;移动体目㊃78㊃现代交通技术2021年标的地面位置检测精度ɤ1m;巡航监测特定区域与突发事件现场监测预警分辨率ɤ20cm㊂3.1㊀基于飞艇的基础设施和列车运行环境监测基于飞艇的基础设施和列车运行环境监测总体方案如图2所示,安装在飞艇平台上的光电吊舱等遥感遥测设备对监控区域进行实时监控,并将原始数据实时发送至地面中心,由地面中心从原始数据中分析可能影响铁路运营安全的因素㊂图2㊀基于飞艇的基础设施和列车运行环境监测总体方案其主要监测对象包括:①落石㊁动物㊁车辆㊁设施㊁遗留物品等引起的侵限事件;②地形地貌;③水文;④桥梁垮塌等较大形变;⑤隧道塌陷㊂为了保证对监测对象的覆盖能力和飞艇的持续工作能力,该飞艇的工作环境及指标参数设置如下:飞艇驻留在20km 高空;舱内设备(网关和通信设备)温度-45ħ~50ħ,气压3kPa 环境下可靠工作;舱外设备(天线)温度-60ħ,气压3kPa 环境下可靠工作㊂在实际使用过程中可能会存在飞艇在高度和水平位置的驻留稳定性问题,可以通过飞艇的动力和控制系统进行位置调整,保持监测范围的稳定性㊂3.2㊀基于无人机的基础设施和列车运行环境监测地面中心制定巡检任务交由翼型无人机巡检,翼型无人机巡检方案如图3所示㊂巡检时由翼型无人机控制指挥设备进行控制指挥,并实时将无人机状态信息转发至地面中心㊂翼型无人机所搭载的遥感遥测设备的部分监控数据通过艇载基站实时转发至地面中心㊂其主要监测对象包括:①落石㊁动物㊁车辆㊁设施㊁遗留物品等引起的侵限事件;②地形地貌;③水文;④线路扣件丢失;⑤桥梁垮塌等较大形变;⑥隧道塌陷;⑦接触网异物㊂为了保障监测对象覆盖能力和无人机的持续工作能力,该无人机的工作环境及指标参数设置如下:无人机在铁路沿线进行常规或应急巡航飞行,进行巡航监测特定区域与突发事件现场监测;温度-25ħ~70ħ环境下可靠工作㊂在实际使用过程中可能会存在无人机滞留在线路上,与列车㊁接触网发生接触或干涉,在隧道内或山区巡航时因通信中断而导致失联,风力较大时无人机不能稳定飞行等问题,需要无人机操作人员对监测时间㊁环境及操作方法有很好的判断能力㊂图3㊀翼型无人机巡检方案3.3㊀基于轨旁设施的基础设施和运行环境监测基于轨旁设施的基础设施和运行环境监测系统由地面传感器进行状态感知,并将数据通过现场采集服务器进行收集,最后通过无线网络发送至后台数据处理服务器㊂其主要监测对象包括:①气象环境;②线路路基沉降;③线路钢轨状态;④桥梁应力;⑤落石㊁动物㊁车辆㊁设施㊁遗留物品等引起的侵限事件㊂为了保障轨旁监测设备的可靠性和稳定性,其工作环境及指标参数设置如下:温度-25ħ~70ħ环境下可靠工作㊂在实际使用过程中可能会存在线路周边安装设备不牢固,造成对线路限界侵限等风险,需要加强设备安装牢固性㊂3.4㊀机车运行状态监测在车载监测节点内部,车载数据采集㊁存储与处理设备接收所有车载传感监测系统输出接口以及既有监测系统数据总线的数据并进行存储㊁预处理㊁统一编码与集成,然后经空间路由网关㊁车载移动通信终端发送出去,通过空天车地轨道交通专用网络发送至地面中心节点㊂列车监测节点向地面中心节点发送本列车的状态监测数据,在地面中心的显示终端上显示列车状态信息㊂机车状态监测数据采集㊁分析㊁转发和显示流程如图4所示㊂㊃88㊃第1期高一凡,等.空天车地一体化重载铁路安全保障技术框架其主要监测对象包括:①轴箱状态;②齿轮箱状态;③牵引电机状态;④制动系统状态;⑤辅助逆变系统状态;⑥司机状态㊂为了保障车载监测设备的可靠性和稳定性,其工作环境及指标参数设置如下:温度-25ħ~70ħ环境下可靠工作;满足‘轨道交通机车车辆电子装置“(GB /T 25119 2010)要求㊂在实际使用过程中可能会存在车外安装的设备松脱等风险,需要车外设备满足振动冲击要求并采取相应防松㊁防脱措施㊂图4㊀机车状态监测数据采集㊁分析㊁转发和显示流程3.5㊀基于地面传感器和卫星的列车位置实时监测基于卫星定位的多传感器信息融合组合定位如图5所示,在列首放置一套列车定位单元,采用GNSS /INS(全球导航卫星系统/惯性导航系统)松耦合组合定位算法,结合差分定位技术,随着场景的变化,系统自动切换定位方法,实现列车高精度无缝定位㊂图5㊀基于卫星定位的多传感器信息融合组合定位针对重载铁路高密度㊁大轴重及长大编组列车的运行特点,结合列车高精度连续无缝定位技术,实现列车面向线㊁桥㊁隧等多种复杂运行场景实现高精度连续无缝定位㊂3.6㊀轨道交通系统状态信息获取㊁融合与决策支持平台㊀㊀通过空天车地信息深度融合方法和复杂环境下列车与基础设施运营安全状态的综合分析技术㊁多平台监测信息的时空关联关系与融合模型㊁多维度监测信息大数据接入和存储管理技术㊁基于数据云和计算云的监测信息大数据挖掘技术,实现对多元时空大样本数据的有效处理和分析利用,构建信息共享交互大数据处理平台㊂其实现的功能包括:①重载铁路应急信息获取;②重载铁路突发事件分类分级;③重载铁路应急预案编制管理;④重载铁路应急预案模板管理;⑤重载铁路应急资源管理;⑥重载铁路应急预案命令下达;⑦应急条件下重载铁路应急运输径路遴选;⑧应急条件下重载铁路列车开行方案编制;⑨应急条件下重载铁路列车编组计划编制;⑩重载铁路应急预案评估;◈1应急条件下重载列车开行方案与编组计划评价;◈12重载铁路列车运行径路评价㊂3.7㊀运营与安全综合保障的空天车地信息协同技术平台㊀㊀空天车地轨道交通专用网由浮空器节点㊁无人机节点㊁列车节点㊁地面移动节点和地面中心节点㊁地面站节点组成,空天车地轨道交通专用网拓扑结构图如图6所示㊂图6㊀空天车地轨道交通专用网拓扑结构图为了保障监测信息的稳定可靠传输,空天车地专用网络系统的指标参数设置如下:高速接入带宽ȡ2Mbps;临空地骨干链路通信带宽ȡ100Mbps;转发速率ȡ300Mbps;地面监测节点带宽ȡ100Mbps;车-空-车㊁车-空-地信息无缝互联,业务信息传输速率ȡ1Mbps㊂㊃98㊃。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
节点临近空间无人机平台技术参数与创新点三面图节点无人系统特点总体布局示意图“节点”-临近空间无人侦察/预警平台是一种新概念的临近空间装备,它将情报、监视、侦察(ISR)功能与远程预警功能集合与一身,以高空长航时(HALE)无人机为平台,能够在临近空间进行超长航时连续飞行的一种新概念装备。
与现有的预警飞机所不同的是:它是一种无人驾驶飞行、临近空间作战、多传感器、多任务的综合平台。
与传统的预警机相比飞行时间更长(能够连续飞行72小时),采用先进的有源电扫描体制的相控阵雷达,并采用共形天线技术,将雷达天线与蒙皮和机身结构融为一体,能够实现360度全空域、无盲区预警。
与现有的执行情报、监视、侦察任务高空长航时无人机相比它的续航时间更长、任务载荷更多、隐身性能更好,而且兼具预警和ISR双重功能,不仅能够静止目标和运动目标进行有效的侦察、识别、跟踪与监视,还能够对对空中威胁进行有效预警。
在未来的网络中心战和体系对抗的作战环境中,它就像一个空中的传感器网络“节点”,将搜集的情报信息实时地传送给地面指挥官和其他作战平台,实现信息共享,协同作战。
因此,取名“节点”,意味着在未来战争中,它将起到作战部队的“眼睛与耳朵”的关键作用,是整个作战体系信息来源的关键“节点”。
技术参数:设计起飞重量:45t任务载荷:4 t燃油重量:25t翼展:76m机长:20m机高:3.5m巡航马赫数:0.65M飞行高度:2438m最大续航时间:72h下面将对“节点”-临近空间侦察/预警无人机的一系列创新设计进行摘要性介绍,详细描述见论文。
一、独创的总体布局设计与隐身设计“节点”无人机采用双机身、前后串列翼、无垂尾布局。
两机身互相平行,并与互相平行的前、后机翼形成巨大的“口”字,机身截面形状呈菱形。
为了实现360度全空域无盲区预警,“节点”无人机将采用共形相控阵天线技术。
共形相控阵雷达天线由成百上千的独立的收发和辐射单元(T/R组件,一种微型的集成电路板)组成,排成阵列形式,利用电子计算机控制移相器改变天线孔径上的相位分布来实现波束在空间扫描。
它与传统的机械扫描单脉冲体制的天线系统相比省略了整个天线驱动系统,降低了结构重量与机械复杂度;其中个别部件发生故障时,仍保持较高的可靠性;扫描速度快;重要的是可以使用同一天线实现多种功能,如预警与合成孔径成像等。
共形又称保形,是指将天线与蒙皮或机身结构融为一体,蒙皮即天线、天线即蒙皮,即能够承受载荷,成为机体的一部分,也可以作为天线,用于远程预警。
“节点”无人机将天线布置在前后翼的下表面,并于机翼蒙皮融为一体;四块平面相控阵天线布置在机身的四条边上。
四块天线构成巨大的“口”字形,而且天线安装在机身,以及前、后机翼翼中段,这里的结构刚度大,从而最大限度地减小了气动变形对天线的影响,能够更好地发挥天线的性能。
与机翼共形相的控阵天线主要作为预警雷达天线使用,机身下方两侧的天线可以两种模式工作:预警雷达模式和合成孔径雷达模式,因此可执行对空预警和对地雷达三维成像双重任务;机身上方两侧天线为预警雷达对上方全空域的威胁进行预警探测,同时也是卫星通信天线,用于无人机与地面站的远程通信与控制。
从下视图看,机翼机身的天线也组成“口”字形,增加了天线的口径,可实现飞机对下半球空域的360度、全向无盲区探测。
因此“节点”无人机不仅能对低空目标进行预警探测,还能对更高的临近空间飞行器进行有效的预警。
采用共形天线技术以后,天线与机体复杂的三维曲面融合在一起,可以克服线阵和平面阵扫描角小的缺点,能够实现全空域电扫和全向感知;彻底避免了传统飞机需要硕大的雷达罩和单独为天线安装布置突起物,对飞机气动性能带来的不利影响,同时降低了RCS值,提高了飞机的隐身性能。
机头下方安装有综合传感器吊舱,光电/红外传感器和其他高性能专用传感器安装在里面。
高性能涡轮风扇发动机位于机身上部,从而避免了地面雷达照射发动机叶片产生的巨大回波,因此大大提高了飞机的隐身性能;由于没有垂尾,全机在侧视图上呈扁平状,机身由四块平面按能使飞机在最安全方向飞行的角度简单拼接而成;飞机的所有几何模线边角平行,这样的设计可以将雷达波反射到几个特定得角度上;在强雷达反射的直角部位涂上先进的轻质隐身材料。
这一系列隐身设计可大大减小飞机的RCS值,提高了飞机生存力。
二、崭新的非常规气动布局设计与机翼设计由经典的布雷德盖方程可知,提高飞机续航能力的关键在于提高飞机的升阻比,对于超长航时续航飞行能力节点无人机来说,必须采取一系列增升减阻新技术,努力提高飞机的升阻比。
常规的机翼-尾翼布局的飞机来说,平尾为了配平飞机,通常升力是向下的,从而损失了机翼的部分升力。
节点无人机采用超大展弦比,前后翼串列布局,两个机翼同时产生升力,避免了升力损失,或者可以在同样的升力需求下减小机翼的尺寸,从而降低了阻力。
超大展弦比机翼设计大大降低了诱导阻力,从而提高飞机的升阻比。
这种布局一个先天劣势是前后翼的干扰问题,前翼对后翼气流的阻滞与下洗,导致后翼的可用升力较小,抵消了该布局的气动优势。
NMEC- UAV 将采用一种创造性的解决方案来解决这一问题:在后翼上表面采用弦向吹气增升技术,克服前翼的气流阻滞与下洗影响,从发动机外涵道引出低温高速气流,通过沿主翼中段展向缝状喷口喷出,加速上翼面气流,增加后翼环量,从而克服了气流阻滞与下洗对后翼的不利影响;同时为了减少部件间的相互干扰导致的干扰阻力,“节点”无人机将采用主动干扰控制技术,通过在转折部位,通过吹气主动改变流场状况,降低部件的相互干扰,减小阻力。
为了进一步减小飞机阻力,节点无人机采用主动层流控制技术,人为地增大层流面积,减小摩擦阻力。
为了使飞机在起飞、爬升、巡航、下滑的各个飞行阶段都能获得优异的气动效率,“节点”无人机将采用压电材料和柔性蒙皮制造能够感受气动载荷的变化并主动改变弯度的智能自适应机翼,以使飞机在任何飞行状态下均能达到最佳的气动性能。
压电材料是利用压电效应与逆压电效应研制的新型智能材料。
压电材料呈现压电效应时,在外电场作用下压电体会产生形变,因此可以利用压电材料制造机翼的前后缘,通过控制电压实现对机翼的弯度与形状控制;压电材料在呈现逆压电效应时能够将形变转化为电信号,这时候压电材料就是载荷传感器,实时感知翼面载荷变化,使反馈控制成为可能。
“节点”无人机的自适应机翼的工作原理是这样的:将压电材料填充到机翼的前后缘,前后缘蒙皮采用柔性材料制造,在控制电压的作用下压电材料发生形变,从而改变了机翼剖面形状与翼形弯度,同时压电材料将当地机翼的气动载荷以电信号的形式反馈给机载控制计算机,计算机根据反馈信号修整控制电压,不断修正机翼外形,维持出一个在当前飞行状态下具有最佳气动性能的机翼。
超大展弦比机翼一个最大的技术难点在于气动弹性变性问题。
为了更好地解决这个问题,节点无人机将采用先进的主动气动弹性控制技术,通过主动控制技术改善机翼载荷分布从而抑制或减小气动弹性变性问题。
另外,“节点”无人机的机翼采用复合材料整体成型技术制造,由于复合材料具有各向异性的特点,通过巧妙的复合材料剪裁设计,能够大大增加机翼刚度,减少气动弹的变形。
三、基于自适应机翼的无舵面飞行控制的概念设想在传统的飞机控制系统设计中,人们通过舵面偏转产生不对称的气动力矩作为操纵力矩对飞机的飞行姿态实施操纵。
这种操纵模式必须辅以许多液压或电液驱动舵机和其他配套的相关设备才能进行,而且舵面的安装破坏了连续光滑的机翼,导致很多缝隙从而产生很大的泄漏阻力,同时舵面偏转还将增加飞机的RCS 值,不利于隐身。
随着控制技术的不断进步与自适应机翼的逐渐成熟,这里提出了基于自适应机翼的无舵面飞行控制的概念设想,具体原理是这样的:自适应机翼采用压电材料作为形状变化的驱动材料,当需要对飞机进行操纵时,操纵信号由机载飞行控制计算机发出,并最终转换成控制电压,传递到机翼前后缘的压电材料结构上,压电材料在精心计算的控制电压的作用下发生形变,从而改变机翼的剖面形状,进而产生不对称的操纵力矩,对飞机姿态实施操纵;同时姿态传感器将飞机当前姿态反馈给机载计算机,飞控计算机参照当前飞行姿态对操纵信号进行实时修整直到完成某一飞行操纵为止。
通俗地讲,就是通过协调机翼任意剖面的翼形气动特性,使整个机翼构成一个“虚拟”的气动力控制面。
这时候机翼宛如一个灵动的翅膀,像鸟儿的翅膀一样实时地感受气动力的微妙变化,快速地修正翅膀的角度与姿态,是一种高度智能化的飞行控制模式。
可以想见,在整个飞行控制过程中,作为神经中枢的机载计算机是否具有对海量信息实时处理能力是这种概念操纵模式能否实现的关键。
随着计算机存储容量与计算能力的几何级数式增长,在不远的将来是可以实现的。
这种基于自适应技术的无舵面智能飞行控制方式,颠覆了传统的飞机操纵模式,彻底取消了舵面和相关机械设备,不仅降低了结构重量,减小了飞行阻力,还将提高飞机的隐身特性。
四、基于分子筛氢氧燃料电池新型供电系统概念设想大功率共形相控阵雷达在长时间的工作中要消耗大量能量,不仅如此,传感器、航空电子设备以及其它分系统也需要大量的电能,如果仅仅靠提取发动机的轴功率来满足所有的电力需求显然是远远不够的。
“节点”无人机创造性地采用一种基于氢氧分子筛燃料电池的新型供电系统。
它的工作原理是这样的:沿机身中轴线布置一个圆柱形空腔,机身头部开口,正对来流方向,无人机在平飞时,高空的稀薄的空气被灌入空腔,利用气体的冲压作用,密度增大,压强升高。
在空腔内部均匀地按比例涂上能将空气中的氧气析出的分子筛薄膜,析出的氧气通过管道输送到位于机身中部的燃料电池反应器中与自身携带的液态氢燃料发生化学反应产生电能,并通过导线将电能源源不断地供给相控阵雷达、各种传感器和其它航空电子设备。
这种基于氢氧分子筛的燃料电池,氧气直接取自空气,不需要自带液态氧燃料,是一种可再生能源,因此节省了燃料重量,供电时间也夜可大大延长,十分经济。
这种燃料电池产生的废物是水,对空气无污染。
结构简单,重量轻,因此是一种经济、环保高效的新型机载能源系统。
目前,分子筛制氧技术已经在有人机飞行员的生命保障系统中得到成功应用。
随着材料技术和分子筛析取气体效率的不断提高,在不远的将来,分子筛膜可以做得很薄,直接贴附在圆形空腔的内壁,增加与空气的接触面积,提高氧气的制备效率。
同时高空的低温空气进入机身后,能够带走大量热量,起到很好的冷却作用。