顺控表
DCS系统原理及应用情况

5、可靠性高:硬件制造水平高,冗余措施、自诊断技术强。
6、便于其他系统连接:配备了完善的通讯接口,方便与其他控制系 统通讯,和上位生产工具管理连接。
三、DCS系统在我厂的应用
按生产厂商(日本横河、美国霍尼韦尔、浙江中控、和利时) 1、日本横河
、
3、我厂PLC系统的状况 1)西门子PLC
S7-300(老球罐、芳烃罐区、汽油罐区、供水净化池、火炬、排水 污水回用、三污、聚二PK804、PK902、2#焦化高压水泵)
S7-400(余热电站、原重油罐区、聚二EX801) 2)GE公司PLC
VersaMax(聚一二工段) GE90-70(联合气压机、焦化3#压缩机、10万吨聚丙烯ESD) GE90-30(加氢压缩机) GMR(联合1#主风机) 3)TRICON TS3000(重整加氢K302、催化三机组、3#加氢循环氢压缩机) TRIDENT(2#焦化压缩机) 4) 莫迪康PLC QUANTUM系统(锅炉水处理)
LCN
NIM
实时数据服务
FSC 故障安全控制器
UCN1
工厂应用平 台
APP/AM 应用过程平台
PHD 工厂数据库系统
HM 历史数据服务
Honeywell Honeywell
HPM 高性能过程控制器 Honeywell
HoneyweHlol neywell
Honeywell
Honeywell HoneyweHlol neywell
态。 3)顺控图:顺控表的条件、动作的状态。
F)开放数据功能 WINXP操作系统、支持DDE、OPC方式 与其它上位机通讯
日本横河(YOKOGAWA) 横河CS3000 DCS高级资料
CS3000高级资料学习2006-3-6参考资料:CS3000西安培训资料CS3000培训教程CS3000系统介绍资料一、系统概述1、CS3000系统构成及设备1.1CS3000系统构成及设备甲乙酮控制站:安全栅柜开关信号柜:域的概念:由一条控制总线连接的站的集合。
域的最小配置:1个FCS、1个HIS(控制站,操作站)域的最大配置:一个域中有以下设备HIS、FCS、BCV(总线转换器)总共最多64个站,其中HIS最多有16个,8个操作站以上需服务器,用于存放项目的数据。
系统最大配置,通过BCV可将域互连,互连的域最多16个,在整个多域系统中最多256个站。
域的层次最多三层,由两个总线转换器连接系统最大工位数1000,000。
一个回路算一个工位数。
1.2CS3000的网络介绍CS3000使用Vnet,Ethernet,RIO bus,ESB bus,ER bus构成站间通讯。
1.2.1Vnet用于连接系统内各个部件的实时控制网。
相关数据最大站节点:64域传输速率:10Mb/s连接电缆:YCB111(细缆)/YCB141(同轴电缆)HIS间连接用YCB111,HIS与控制站连接用YCB141通过总线适配器YCB147(单)/YCB149(双),总线中继器YNT521将YCB141与YCB111相连传输距离:YCB111 500MYCB141 185M混合连接:YCB141+0.4*YCB111《185M使用光纤及中继器YNT511和YNT521可以达到4KM和15KM1.2.2Ethernet用于系统内各个HIS间进行数据交换的网络,一个域内最多16个HIS,其中一个用于组态。
1.2.3RIO BUS(用于RIO型)I/O 通讯总线,用于FCS 处理器与NODE 间的连接 相关数据:最大连接设备:8NODE/FCU 传输速率: 2MB/S传输介质:双绞线、光纤 传输距离:双绞线,750M 。
加中继器YNTD-R 最大3.75KM ,使用光纤及中继器YNT511可达20KM1.2.4ESB BUS (用于FIO 型)I/O 通讯总线,用于FCS 处理器与本地NODE 间的连接 相关数据最大连接设备:10NODE/FCUVV net–Media : Coaxial Cable or Optical Fiber– Protocol : IEEE 802.4 – Access Control : Token Passing – Trans. Speed : 10 Mbps Transmission path :10BASE5-compliant 50 ohm coaxial cableConnector :BNC Coaxial connectorEthernetRIO‧Remote I/O bus•Communication : Cyclic Scan Trans. • Trans. Speed : 2 Mbps • Trans. Distance : 20Km max.. •Node : 8 nodes传输速率:128MB/S传输介质:使用电缆YCB301传输距离:最大10M1.2.5 ER BUS(用于FIO型)I/O通讯总线,用于FCS处理器与远程NODE间的连接相关数据:最大连接设备:1条ER BUS线上最多连接4个远传NODE传输速率:10MB/S传输介质:YCB141/YCB311(同轴)传输距离:YCB141 185M YCB311 500M2、软件概述安装完后,与一般WINDOWS程序一样,可从程序里进入,如下图所示:下面介绍主要几个软件的应用:2.1、HIS Utlity如下图所示,主要作为登陆时是否直接激活CS3000的操作画面。
日本横河DCS CS3000培训教材

日本横河DCS CS3000培训教材目录一.横河系统项目的一般创建步骤二.PROJECT的创建三.COMMON ITEMS通用项目的定义四.FCS组态五.HIS组态日本横河DCS CS3000培训教材一.横河系统项目的一般创建步骤依照相关的自控图纸和工艺说明,进行DCS的软硬件选型、相关系统软硬件设计、软件模拟测试、软硬件上电测试、与现场仪表联动调试。
最终提交用户一个硬件安全可靠、软件健壮界面友好操作方便的工艺过程监控平台。
第一步:由自控图纸和工艺说明以及DCS规格需求书,确定系统硬件配置(包括控制器、I/O、通讯、操作站、服务器、以及其它附件),绘制系统配置图、机柜布置图、各种接线图。
第二步:利用SYSTEM VIEW 集成的工具进行硬件组态,包括控制器、I/O节点、I/O卡件、I/O通道、操作站。
第三步:利用SYSTEM VIEW集成的工具进行软件组态,包括回路控制组态、联锁逻辑组态、顺序控制组态、批量控制组态以及操作站各种人机界面的组态。
第四步:利用SYSTEM VIEW集成的虚拟测试功能,对控制器以及操作站组态进行软件功能测试。
通过此项测试可以解决其它系统只有在连接实际硬件时才能发现的问题,为安装调试做好准备。
第五步:系统安装调试,经考核运行后,提交用户。
下面是横河的工程工作流程图二.PROJECT的创建(详细内容参见横河文档IM 33S01B30-01E)1.PROJECT的类型(1)DEFAULT PROJECT当SYSTEM VIEW第一次启动创建的项目,为缺省项目,能够对控制器进行下载。
(2)CURRENT PROJECT一旦DEFAULT PROJECT项目中的一个FCS下载成功时,该项目属性自动变为CURRENT PROJECT,从而能够在线的对项目进行修改。
(3)USER-DEFINED PROJECT除以上两个类型PROJECT以外,创建的项目。
此类型的项目不能对控制器进行下载,只有通过改变PROJECT属性类型为DEFAULT 时,才能下载。
日本横河DCS CS3000培训教材
日本横河DCS CS3000培训教材目录一.横河系统项目的一般创建步骤二.PROJECT的创建三.COMMON ITEMS通用项目的定义四.FCS组态五.HIS组态日本横河DCS CS3000培训教材一.横河系统项目的一般创建步骤依照相关的自控图纸和工艺说明,进行DCS的软硬件选型、相关系统软硬件设计、软件模拟测试、软硬件上电测试、与现场仪表联动调试。
最终提交用户一个硬件安全可靠、软件健壮界面友好操作方便的工艺过程监控平台。
第一步:由自控图纸和工艺说明以及DCS规格需求书,确定系统硬件配置(包括控制器、I/O、通讯、操作站、服务器、以及其它附件),绘制系统配置图、机柜布置图、各种接线图。
第二步:利用SYSTEM VIEW 集成的工具进行硬件组态,包括控制器、I/O节点、I/O卡件、I/O通道、操作站。
第三步:利用SYSTEM VIEW集成的工具进行软件组态,包括回路控制组态、联锁逻辑组态、顺序控制组态、批量控制组态以及操作站各种人机界面的组态。
第四步:利用SYSTEM VIEW集成的虚拟测试功能,对控制器以及操作站组态进行软件功能测试。
通过此项测试可以解决其它系统只有在连接实际硬件时才能发现的问题,为安装调试做好准备。
第五步:系统安装调试,经考核运行后,提交用户。
下面是横河的工程工作流程图二.PROJECT的创建(详细内容参见横河文档IM 33S01B30-01E)1.PROJECT的类型(1)DEFAULT PROJECT当SYSTEM VIEW第一次启动创建的项目,为缺省项目,能够对控制器进行下载。
(2)CURRENT PROJECT一旦DEFAULT PROJECT项目中的一个FCS下载成功时,该项目属性自动变为CURRENT PROJECT,从而能够在线的对项目进行修改。
(3)USER-DEFINED PROJECT除以上两个类型PROJECT以外,创建的项目。
此类型的项目不能对控制器进行下载,只有通过改变PROJECT属性类型为DEFAULT 时,才能下载。
表胶制备顺控逻辑图
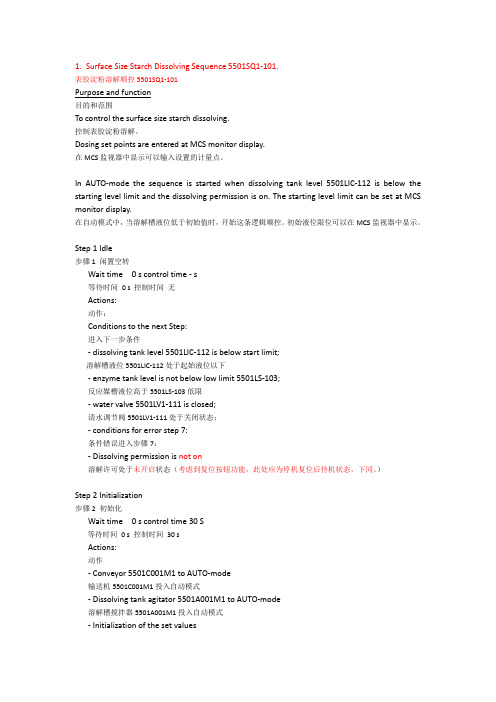
1. Surface Size Starch Dissolving Sequence 5501SQ1-101.表胶淀粉溶解顺控5501SQ1-101Purpose and function目的和范围To control the surface size starch dissolving.控制表胶淀粉溶解。
Dosing set points are entered at MCS monitor display.在MCS监视器中显示可以输入设置的计量点。
In AUTO-mode the sequence is started when dissolving tank level 5501LIC-112 is below the starting level limit and the dissolving permission is on. The starting level limit can be set at MCS monitor display.在自动模式中,当溶解槽液位低于初始值时,开始这条逻辑顺控。
初始液位限位可以在MCS监视器中显示。
Step 1 Idle步骤1 闲置空转Wait time 0 s control time - s等待时间0 s 控制时间无Actions:动作:Conditions to the next Step:进入下一步条件- dissolving tank level 5501LIC-112 is below start limit;溶解槽液位5501LIC-112处于起始液位以下- enzyme tank level is not below low limit 5501LS-103;反应媒槽液位高于5501LS-103低限- water valve 5501LV1-111 is closed;清水调节阀5501LV1-111处于关闭状态;- conditions for error step 7:条件错误进入步骤7:- Dissolving permission is not on溶解许可处于未开启状态(考虑到复位按钮功能,此处应为停机复位后待机状态,下同。
控制状态图或顺控

以提高分析和评估能力。
05 控制状态图与其他方法的 比较
与流程图的比较
总结词
控制状态图和流程图都是用于描述系统行为的工具,但它们在表示方式和应用上有一些不同。
详细描述
流程图使用图形符号表示一系列操作和决策,适用于描述简单的流程和算法。控制状态图则更适用于描述具有复 杂状态转换的系统,特别是控制系统和嵌入式系统。控制状态图能够更清晰地表示状态间的转换条件和动作,以 及并发和同步问题。
感谢您的观看
THANKS
与Petri网的比较
总结词
Petri网是一种数学建模工具,用于描述 离散事件系统中的并发和同步行为。
VS
详细描述
Petri网使用图形化的方式表示系统中的 库所、变迁和有向弧,能够清晰地表示并 发和同步操作。控制状态图与Petri网在 描述系统行为方面有相似之处,但控制状 态图更强调状态转换和控制逻辑的描述, 而Petri网更注重并发和同步的数学性质 。
易于扩展
随着系统规模的扩大,控制状态图可以方便 地增加新的状态和转换,具有较强的可扩展 性。
局限性
状态爆炸问题
对于具有大量状态和转换的系统,控制状态图可能会变得非常庞大 和复杂,导致管理和理解难度增加。
逻辑复杂性
对于具有复杂控制逻辑的系统,控制状态图可能难以准确地表示其 行为,特别是涉及到条件分支和循环的情况。
与UML状态图的比较
要点一
总结词
UML(统一建模语言)状态图是用于描述对象的行为和状态 转换的工具。
要点二
详细描述
UML状态图使用图形化的方式表示对象的各种状态以及状 态之间的转换,能够清晰地描述对象的行为。控制状态图 与UML状态图在表示状态转换方面有相似之处,但控制状 态图更强调控制逻辑和控制流,而UML状态图更注重对象 的属性和行为。
CS3000-5FCS组态

五、顺控辅助功能块的使用
5.1 计时器的使用 5.2 计数器的使用 5.3 关系比较式的使用 分别举例说明
六、开关仪表功能块的使用
6.1 开关仪表功能块的分类
◆SI-1 ◆SI-2 ◆SO-1 ◆SO-2 ◆SIO-11 ◆SIO-12 ◆SIO-21 ◆SIO-22
六、开关仪表功能块的使用
6.2 以SIO-22为例介绍开关仪表的使用方法
七、逻辑图功能块的使用
7.2.5 断开延时逻辑块
七、逻辑图功能块的使用
7.2.6 上升沿触发逻辑块
七、逻辑图功能块的使用
7.2.7 下降沿触发逻辑块
八、举例说明顺控表及逻辑图的使用
8.1 用顺控表完成如下功能
八、举例说明顺控表及逻辑图的使用
8.2 顺控框图如下
八、举例说明顺控表及逻辑图的使用
七、逻辑图功能块的使用
7.1 逻辑图打开方法及样式
七、逻辑图功能块的使用
7.2 逻辑图规格
七、逻辑图功能块的使用
7.2 逻辑图组态逻辑元素
7.2.1 与和或逻辑块
七、逻辑图功能块的使用
7.2.2 否定逻辑块
七、逻辑图功能块的使用
7.2.3 RS触发器逻辑块
七、逻辑图功能块的使用
7.2.4 接通延时逻辑块
启动方式 扫描方式
输入信号
输入连 接信息 设定区
输出信号
条 件 详 细 设 定 区 操 作 详 细 设 定 区
条件规则 设定区
输出连 接信息 设定区
动作规则 设定区
二、顺控表功能块
◆顺控表填写规范
二、顺控表功能块
◆启动方式TC/TE的区别 T:周期执行 C:条件变化时输出 E:条件成立时始终输出
顺序功能流程图及顺控步进梯形图自动编程方法
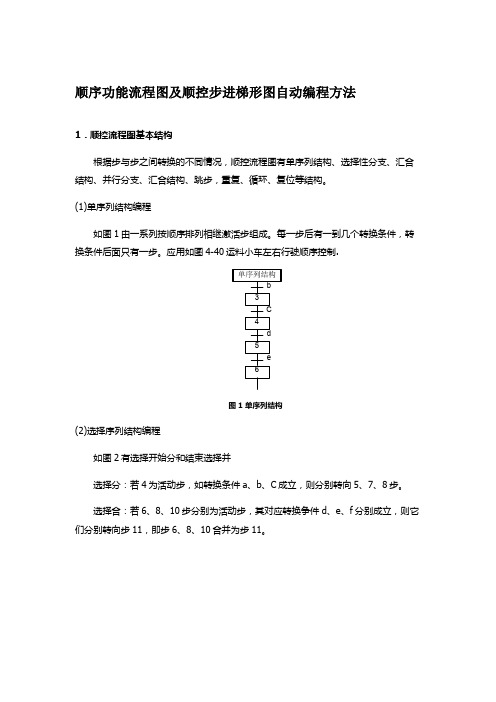
顺序功能流程图及顺控步进梯形图自动编程方法1.顺控流程图基本结构根据步与步之间转换的不同情况,顺控流程图有单序列结构、选择性分支、汇合结构、并行分支、汇合结构、跳步,重复、循环、复位等结构。
(1)单序列结构编程如图1由一系列按顺序排列相继激活步组成。
每一步后有一到几个转换条件,转换条件后面只有一步。
应用如图4-40运料小车左右行驶顺序控制.单序列结构b3C4d5e6图1 单序列结构(2)选择序列结构编程如图2有选择开始分和结束选择并选择分:若4为活动步,如转换条件a、b、C成立,则分别转向5、7、8步。
选择合:若6、8、10步分别为活动步,其对应转换争件d、e、f分别成立,则它们分别转向步11,即步6、8、10合并为步11。
cf图2 选择序列结构(3)并列序列结构编程并行序列也有开始并分与结束并合。
如图3。
并行分(图3左):当转换条件e 满足时,活动步3,同时转换为步4、6、8。
并行合(图3右):当转换条件d 满足时,同为活动步的5、7、9可合并为步10。
并行分并行合346810579ed图3(4)子步结构编程子步结构是指在流程图中,某一步包含一系列子步和转换。
这在工程总体方案设计中,经常被采用。
如图4,先用几步和转换简洁表示整体系统功能,然后每步再细化为若干子步和转换。
单一流程的编程选择性分支、汇合的编程并行分支、汇合的编程5X1X65.2X2X35.3X4X55.1X15.4X6子步结构4(5)跳步,重复、循环、复位等结构编程跳步、重复和循环等序列结构,实际上是选择序列结构的特殊形式,如图5。
图5(a)为跳步结构,当步3为活动步时,如转换条件e成立,则跳过步4、5,直接进入步6。
图5(b)为重复结构,当步6为活动步时,如转换条件e成立而条件d不成立,则重新返回步5,重复执行步5、6。
直到条件d成立,重复结束,转入步7。
图5(C)是循环结构,即在序列步结束后,用重复办法直接返回始步,形成系统循环,实现自动运行。
基于顺控表的聚合釜涂布控制系统设计与实现

聚 合 釜 全 自动 顺 序 控 制 技 术 改造 。 实践 证 明 : 系统 不但 改善 了聚 合 釜 涂 布 效 果 , 且 还 提 高 了设 备 利 该 而
用率和树脂质量 , 有广泛的应用推广价值 。 具
关 键 词 顺 空 表
中图分类号
聚合釜
涂 布控 制 仪 表 选 型
文 献标 识 码 B 文 章 编 号 10 —9 2 2 1 )30 8 -3 003 3 (0 2 0 —390
收 稿 日期 :0 20 -7( 改 稿 ) 2 1 -20 修 基 金 项 目 : 南 省 科 技 厅 基 金 项 目(0 1 K 2 7 湖 21G 32 )
30 9
化
工
自 动
化
及 仪
表
第3 9卷
作 以 清除釜 壁 附着 物 , 后 进 行 聚合 釜 涂 布 控 制 然 程 序 , 2所示 为 聚合 釜 自动 涂 布顺序 控制 。 图
件 中。系 统执行 时 , 现场 控制 站 的处理 机 , 从顺 序
司 C N U S 0 0, E T M C 3 0 聚合 釜涂 布工 艺最初 采 用 的 是人 工手 动涂 布技 术 , 其缺 点是 : 操作 工人 劳动 强 度大 , 时为 了提 高班 产量 , 有 操作 工人 故 意跳 过 聚 合釜 涂 布生产 环 节 , 响树 脂成 品质 量 , 且 造 成 影 并 防粘 釜剂 消耗 的增 加 , 而且 达 不 到 预 期 的 涂 布 效 果 。现采 用 一 种 提 高 防粘 釜 剂 雾 化 效 果 的新 工 艺 , 于 C 30 基 S 0 0顺序 表 实现 聚合 釜 自动涂 布 。聚 合釜 自动 涂布 工 艺流程 如 图 1 示 。 所
机化 合物 , 于釜 壁使 聚合 釜壁 钝化 , 涂 同时 阻止 釜
第三章 基本顺控指令(基本逻辑指令

上例的接线图
若串联接点过多时可采用增加辅佐继电器的办法解决
LD X0 AND X1 AND X2 AND X3 AND X4 AND X5OUT M0 LD M0 AND X6 AND X7 AND X10 AND X11 AND X12 OUT Y0
三、串联电路块的并联和并联电路块的串联
接通后的第一个扫描周期内动作(置l)。
(2)使用PLF指令,元件Y、M仅在驱动输入
断开后的第一个扫描周期内动作。
(3)特殊继电器不能用作PLS或PLF的操作元
件。
(4)在驱动输入接通时,PLC由运行→停机
→运行,此时PLS M0动作,但PLS M600(断 电时由电池后备的辅助继电器)不动作。这 是因为M600是保持继电器,即使在断电时其 动作也能保持。
母线(LD,LDI 点)移至MC触 点(本例为 M100)之后,
保持当前状态
变成断开状态
K100 [ STE2T47Y1 ]
返回原来母线 的指令
第一级(不是 第一次)只能 用N0
返回序号要与 MC对应
MCR与MC的 个数要相等
软元件号 不能相同
级的编号N逐 次顺序增大
MCR指令,从 大的嵌套级开 始解除
点火仪式(下水仪式)
X0 X1 X2 X3 Y0
LD X0 AND X1 AND X2
X0 X1 X2 X3 Y0
X4
AND X3
OUT Y0
LD X0 AND X1 AND X2 AND X3 OR X4 OUT Y0
前面的电机正反转控制是一个不完善的控制
程序,不能停止和自保 。
LD X0 OR M10 ANI X1 ANI X2 OUT M10
CS3000控制站功能块使用及控制方案设计

硫 磺 回收装置 投 运后 , 大 大提 高 了 H S / S O 比值
的平稳 率 , 达 到 了改 善硫磺 回收装 置 的运 行条 件 ,
之间, 平 稳率 高 于 8 0 %( 即等 间 隔取 样 , H S / S O : 的 比值 在设 定值 的 土 0 . 5的数据 数 量 大于 总 数t 型, 程序 为 :
p r o g r a m
时间 T S C表 示在 变化 时执行 。T表示 周期 执 行 和
一
TI C31 0 2. MH = 1 00. 0
TI C3l 0 2. ML =5. 0 e nd
触 执行 , s表示 基本 周 期 , c表 示 当状 态 变化 时
% AN 0 0 01 . PV. L
启动运算块 I 工 作 启 动 运 算 块 2工 作
软 件 开 关 %S W0 2 8 8闭合
产 生 报 警 器 信息 1
顺 控 表 中条 件 信 号 T I C 3 1 0 2 . MO D E . A U T是
开始计 算 ; 动作 信 号 C A L 3 1 0 2 — 2 . A C T . O N是 “ Y ” 使 运 算 块 C A L 3 1 0 2 - 2 运 行 。 动 作 信 号
动 切换 到 自动 , 阀位输 出在前两 分 钟之 内 , 开到最
的功能 块是 顺序 控制 功能 块 。图 2中 , %Z 0 2 2 1 0 5
表 示控 制 回路 图 的硬 件连 接号 。
l S T 3 1 O 2 l l C A L 3 1 0 2 — 1 l l C A L 3 1 0 2 — 2 I
TRU E
表示产 生报 警 器 信 息 1 , 为 非 锁 定输 出 。锁 定输 出和非 锁定 输 出是 动 作信 号 的输 出类 型 , 它 们 的
5-FCS组态(顺序控制功能)
FCS组态(顺序控制功能)
Hale Waihona Puke 、顺序控制概念1.1 顺序控制的概念
顺序控制是实现过程控制要求,依照事先定义好的控制条件及顺序, 来执行相应的动作。
1.2 顺序控制的实现方法及功能块
实现方法:顺控表、逻辑图
辅助功能块:开关仪表功能块、计时功能块、比较式功能块、计数功能块
二、顺控表部分
2.1 顺控表概述
执行
T:按扫描周期进行 O:一触执行
输出
C:状态改变时,输出一次 E:条件满足时,每扫描周期输 出
I:冷热启动均执行
B:冷启动执行
TC应用最多,系统默认;其次TE用得较多。 联锁时(强制某种状态)用TE表
正常工况切换(只是状态切换)用TC表
二、顺控表部分
2.5 顺控表执行方式
2.5.1 规则栏方式
2.5.4 00步功能
在带步号的表里可通过指定00步,使00步按规则栏方式执行。 应用:用于小型程序的故障处理等。
二、顺控表部分
2.5.5 顺控表的扩展
当一张顺控表的规则栏、条件或输出不够时,可使用扩展表。扩展该 表,将该表的名称填写在顺控表下部的NEXT栏中。
注:顺控表只能用于步号方式。
ST16E(扩展表)不具有选择哪种类型扫描周期及执行功能。 执行时将ST16投自动,ST16E就自动投自动。扩展表可再接扩展表。99步步
Tag.CSV 操作指导信息 %OGnnnn.PV
AUT MAN
0(1,2) NON
Y
Y Y
顺控请求信息 %RQnnnn.PV
批量数据设定单元 (BDSET-1) Tag.ACT
NON
Y
0(0-17)
Y
仪表工考试:仪表维修工中级知识学习

仪表工考试:仪表维修工中级知识学习1、填空题250PΛ=OmπιH20正确答案:252、问答撅HSF方针是什么?正确答案:安全第一、预防为主,全员动手、综合治理,保护环境、关爱健康,以人为本、持续改进。
3(江南博哥)、填空题调节阀调节低差压,大流量气体,可选用Oo正确答案:蝶阀4、问答题包装机下料阀如有漏料首先检查什么?正确答案:首先检查包装机下料阀联杆有无松动。
5、问答题V形球阀有何特点?正确答案:V形球阀又称V形切口球阀,阀芯为1/4球壳,开有V形缺口,其优点是:①流通能力大,比普通阀高2倍以上;②控制特性好,为等百分比;③可调范围大,可达300:1;④具有剪切作用,能严密关闭,适用于浆料、纤维状流体场合。
6、问答题新区控制室SlS操作站通讯中断的处理。
正确答案:操作步骤如下:(1).观察SlS操作站顶部通讯灯是否闪烁,若未闪烁则表示通讯故障。
(2).看主机上网线是否正常,若不正常看主机网线是否插好,另一端8100控制室旁边网络机柜间网络柜的网线是否插好。
(3).在操作画面上登录用户名C2H2和密码C2H2(注输入用户名和密码是均要按ENTER键),点击用户管理面板的键盘解锁。
(4).同时按+D到WinDows界面,关闭DDE及WinDowviewer程序。
(5),重新打开桌面上WinDOWVieWer程序图标,会出现是否继续运行程序。
点击“是",弹出DDE画面并缩小此窗口,进入用户管理面板的因果画面,观察此时通讯灯闪烁表示通讯正常。
(6).若通讯正常后,登录用户名C2H2和密码C2H2,点击用户管理面板的键盘锁定。
(7).最后点击用户注销并删除用户名。
(切记每次短接后都要做此步骤)7、问答题压力取源部件的安装要求有哪些?正确答案:要求安装在流束稳定的直管段上,不应选在管段拐弯、分支等死角处。
还应避免取在接近测量元件、阀门等阻力件的地方,当必须取在阻力件附近时,则应选在阻力件之前。
顺序控制设计法
顺序控制设计法 (3)与步对应的动作 一个控制系统可以被划分为被控系统和施控系统, 例如在数控车床系统中,数控装置是施控系统,而车 床是被控系统。对于被控系统,在某一步中要完成某 些“动作”(action);对于施控系统,在某一步中 则要向被控系统发出某些“命令”(command)。 为了叙述方便,下面将命令或动作统称为动作,并用 矩形框中的文字或符号表示,该矩形框应与相应的步 的符号相连。
顺序控制设计法
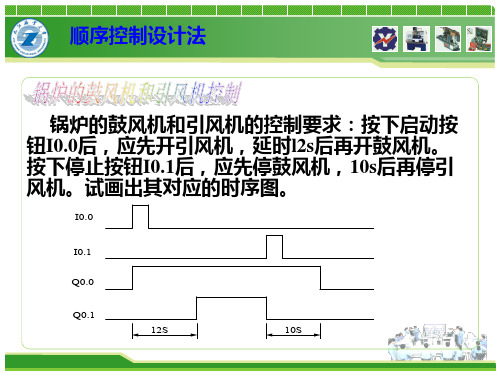
锅炉的鼓风机和引风机的控制要求:按下启动 按钮I0.0后,应先开引风机,延时l2s后再开鼓风机 。按下停止按钮I0.1后,应先停鼓风机,10s后再停 引风机。试画出其对应的时序图。
I0.0
I0.1
Q0.0
Q0.1 12S 10S
顺序控制设计法
其对应的顺序功能图为:
初始步 转换 步 有向 连线 转换条件
顺序控制设计法
根据以上方法,写出锅炉鼓风机和引风机控制 的梯形图程序:
顺序控制设计法
顺序控制设计法
顺序控制设计法
顺序控制设计法
在前面我们已初步了解顺序控制法、简单的顺 序功能图的绘制及其转换为相应梯形图的方法。然 而在实际控制系统中,很多控制流程并非简单的单 序列流程,而是包括了选择分支、并行分支等复杂 的控制流程,为此我们将进一步学习顺序功能图的 基本结构。
顺序控制设计法 顺序控制法用转换条件控制代表各步的编程元 件,让它们的状态按一定的顺序变化,然后用代表 各步的编程元件去控制PLC的各输出位。
锅炉鼓风机和引风机 的顺序功能图
顺序控制设计法 (2)初始步 与系统的初始状态相对应的步称为初始步,初 始状态一般是系统等待启动命令的相对静止状态。 初始步用双线方框表示,每一个顺序功能图至少应 该有一个初始步。
常用基本顺控指令的认识与操作

知识9 主控(MC)、主控复位(MCR)指令
1.使用说明 2.主控、主控复位指令的简单应用(如图所示)
主控、主控复位指令的应用程序
知识10 取反(INV)、空操作(NOP)指令
INV取反指令在梯形图中用一条45°的短斜线“ ”表示,它将执行该指令之前的运算结果 取反,运算结果若为0则将它变为1,运算结果若为1则将它变为0。
M8033 M8034 M8035 M8036 M8037 M8039
内容 零,加减运算结果为0时 借位,减法运算结果小 于负的最大值时 进位,加法运算结果发 生进位时,换位结果溢 出发生时 100ms/10ms定时器切换
指令执行完成
非保持存储器全部消除 保持存储器 全部清除 存储器 保持停止 所有输出禁止 强制运行模式
电路块并联、串联指令表示法
指令符号(名称)
功能
梯形图示法
ORB (块或)
电路块并联
ANB(块与)
电路块串联
2.使用说明 3.块“与”、块“或”指令的简单应用
可选操作元件 — —
ORB、ANB指令的应用
知识5 LDP、LDF、ANDP、ANDF、ORP和ORF指令
1.指令格式及梯形图表示法
指令符号(名称)
X、Y、M、T、C、S
ORF(“或”脉冲下降沿)
下降沿检测并行连接
X、Y、M、T、C、S
2.使用说明 3.脉冲上升沿、下降沿指令的简单应用
脉冲上升沿、下降沿指令的应用程序
知识6 置位、复位指令(SET、RST)
1.指令格式及梯形图表示法
指令符号(名称)
置位、复位指令表示法
功能
梯形图示法
SET (置位) 使元件保持ON
上升沿、下降沿脉冲指令表示法
第五章顺控功能
● SRS1-S (1 output), SRS2-S (2 outputs): Flip-Flop (Set-Dominant)
● WOUT: Wipeout
● OND: On-Delay Timer
● OFFD: Off-Delay Timer
● TON: One-Shot (Rise Trigger)
● TOFF: One-Shot (Fall Trigger)
● CMP-GE: Comparator
● CMP-GT: Comparator
● CMP-EQ: Comparator
2.4 程序举例
closed open
2.8 顺控表的动作规则:
三、逻辑图部分: 3.1 概述:在逻辑图中将输入信号与输出信号,通过逻辑运算符进行连接, 来实现相应的控制功能。 3.2逻辑图的格式:见下图 (1)启动方式: T , O , I , B T :按扫描周期执行 O : 一触执行 (2)逻辑图的状态: AUT——扫描打开;MAN——扫描关闭 (3)联锁条件和输出动作的书写格式同于顺控表 I : 冷热启动均执行 B : 冷启动执行
步号栏:顺控动作的顺序 规则栏:Y成立、N不成立
(3)顺控表的状态:
AUT——扫描打开;MAN——扫描关闭
2.4 顺控表的两种实现方式: (1)规则栏方式例
(2)步号方式例
2.5规则栏方式程序例
-Closed -Open
2.6步号方式程序例
CLOSE(VLVA)
N
Y
2.7 顺控表的条件规则:
逻辑图的格式
启动方式
扫描方式
注释
条件 信号
逻辑描述
动作 信号
注释
逻辑编辑窗口
工程师培训教程
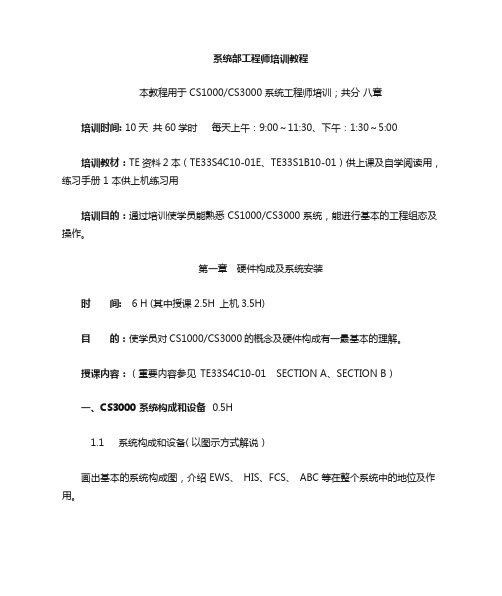
系统部工程师培训教程本教程用于 CS1000/CS3000 系统工程师培训;共分八章培训时间: 10 天共 60 学时每天上午:9:00~11:30、下午:1:30~5:00培训教材:TE 资料 2 本(TE33S4C10-01E、TE33S1B10-01)供上课及自学阅读用,练习手册 1 本供上机练习用培训目的:通过培训使学员能熟悉 CS1000/CS3000 系统,能进行基本的工程组态及操作。
第一章硬件构成及系统安装时间: 6 H (其中授课 2.5H 上机 3.5H)目的:使学员对 CS1000/CS3000 的概念及硬件构成有一最基本的理解。
授课内容:(重要内容参见TE33S4C10-01 SECTION A、SECTION B)一、CS3000 系统构成和设备0.5H1.1系统构成和设备( 以图示方式解说)画出基本的系统构成图,介绍 EWS、 HIS、FCS、 ABC 等在整个系统中的地位及作用。
1.2网络介绍Ethernet、 V-net 的功效及有关参数。
二、HIS 硬件构成0.5H2.1HIS 类型及区别(通用 PC 型及专用落地型)2.2HIS 硬件构成及有关参数(对于通用 PC 机的配备规定,VF701 卡及其地址、操作员键盘等)2.3系统维护画面三、FCS 硬件构成1H3.1FCS 硬件构成3.2FCU 批示灯的含义及站地址的设立3.3过程 I/O 、Node 的硬件构成介绍 NODE(涉及 RIO 型和 FIO 型)的构成介绍 I/O 卡件,使学员理解卡件功效及应用的场合。
讲学时应介绍以下卡件的功效及有关参数:RIO:AAM10、AAM21、AAM50、APM11、AMM12T/C、AMM42T、AMM32T/C、AMM22T/C、ADM11T/C、ADM12T/C、ADM51T/C、ADM52T/C、ADM15R、ADM55RFIO( CS3000): AAI141、 AAV141、 AAI841、 AAT141、 AAR181、 AAI135、AAI835、AAP135、ADV151、ADV551、ADV161、ADV561、ADR541四、系统软件安装0.5H4.1介绍系统软件的构成(媒体、KEYCODE 的作用及惯用软件包的型号)4.2介绍 CS1000/CS3000 系统软件的安装办法。