海洋维权执法浮标信息采集系统的CAN总线设计
(海洋与渔业综合执法信息系统)
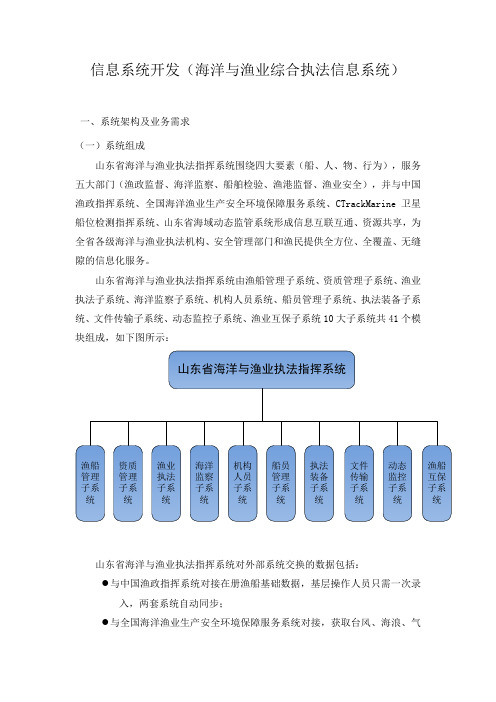
信息系统开发(海洋与渔业综合执法信息系统)一、系统架构及业务需求(一)系统组成山东省海洋与渔业执法指挥系统围绕四大要素(船、人、物、行为),服务五大部门(渔政监督、海洋监察、船舶检验、渔港监督、渔业安全),并与中国渔政指挥系统、全国海洋渔业生产安全环境保障服务系统、CTrackMarine卫星船位检测指挥系统、山东省海域动态监管系统形成信息互联互通、资源共享,为全省各级海洋与渔业执法机构、安全管理部门和渔民提供全方位、全覆盖、无缝隙的信息化服务。
山东省海洋与渔业执法指挥系统由渔船管理子系统、资质管理子系统、渔业执法子系统、海洋监察子系统、机构人员系统、船员管理子系统、执法装备子系统、文件传输子系统、动态监控子系统、渔业互保子系统10大子系统共41个模块组成,如下图所示:山东省海洋与渔业执法指挥系统对外部系统交换的数据包括:●与中国渔政指挥系统对接在册渔船基础数据,基层操作人员只需一次录入,两套系统自动同步;●与全国海洋渔业生产安全环境保障服务系统对接,获取台风、海浪、气压、气象等预警报产品数据,并向其推送渔船位置数据;●与CTrackMarine卫星船位检测指挥系统对接,获取涉外作业渔船位置信息数据;●与山东省海域动态监管系统对接获取海域视频监控数据和基础用海数据,并向对方提供海监执法数据,协助海域管理部门完成用海项目审批和验收。
(二)渔船管理子系统渔船管理子系统是“山东省海洋与渔业执法指挥系统”的核心系统,该系统建成以后,渔政、船检、港监及渔船动态监管等所有使用渔船信息的模块将共用一套渔船基础数据库,保障全省渔船数据的一致性。
该系统分为正常渔船、特种渔船、内河渔船三大类进行管理,涵盖了全省所有渔船。
正常渔船指海洋渔船中纳入中国渔政指挥系统中的渔船,该类渔船数据将与中国渔政指挥系统数据库保持一致,通过网络接口实现自动同步。
特种渔船指“三无渔船”、船证不符渔船等无法纳入国家渔政指挥中心数据库中的渔船。
海洋监测浮标上的 3G无线视频监控系统设计
S H A N D O N GS C I E N C E D O I : 1 0 . 3 9 7 6 / j . i s s n . 1 0 0 2- 4 0 2 6 . 2 0 1 4 . 0 5 . 0 1 7
第2 7卷 第 5期 2 0 1 4年 1 0月出版 V o l . 2 7N o . 5O c t . 2 0 1 4
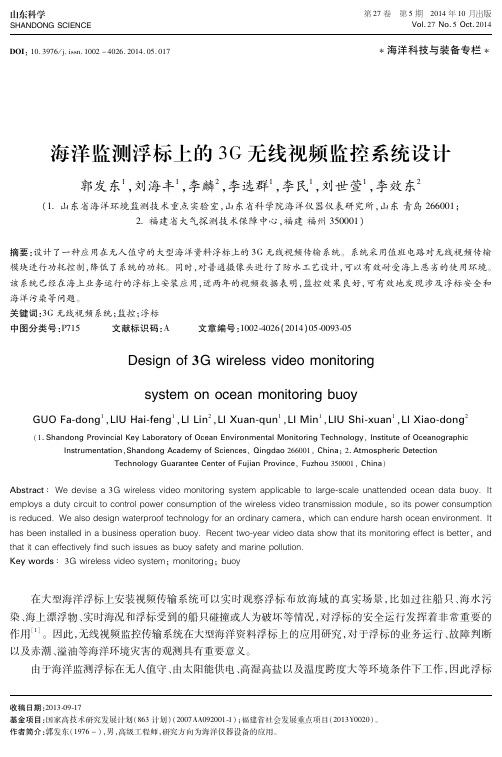
4 ] 接收客户端组成 [ , 系统组成示意图
如图 1所示。依据海洋监测浮标上的 特殊使用环境, 主要进行了视频系统 供电的电源管理设计与摄像头的防护 与水密设计。电源管理模块主要以单
图1 浮标无线视频监控系统示意图 F i g 1 I l l u s t r a t i o no f b u o yw i r e l e s s v i d e om o n i t o r i n gs y s t e m
3 ] 术的发展 [ , 使得在大型海洋监测浮标上安装视频监控系统成为可能。
针对视频监控系统在无人值守的海洋监测浮标上应用存在的问题, 本文设计了一种应用在大型海洋资 料浮标上的无线视频传输系统。目前, 该系统已经在我国近海的赤潮浮标上安装应用两年多, 取得了较好的 实际应用效果。
1 总体设计
无线视频监控系统由供电系统、 3 G无线视频传输模块、 视频传输控制 模块、 防水摄像头、 外置天线以及视频
摘要: 设计了一种应用在无人值守的大型海洋资料浮标上的 3 G无线视频传输系统。系统采用值班电路对无线视频传输 模块进行功耗控制, 降低了系统的功耗。同时, 对普通摄像头进行了防水工艺设计, 可以有效耐受海上恶劣的使用环境。 该系统已经在海上业务运行的浮标上安装应用, 近两年的视频数据表明, 监控效果良好, 可有效地发现涉及浮标安全和 海洋污染等问题。 关键词: 3 G无线视频系统; 监控; 浮标 中图分类号: P 7 1 5 文献标识码: A 文章编号: 1 0 0 2 4 0 2 6 ( 2 0 1 4 ) 0 5 0 0 9 3 0 5
基于海洋资料浮标上目标探测系统的集成设计
,
e mb e d d e d mi c r o c o n t r o l l e r t e c h n o l o g y, CAN b u s t e c h n o l o g y
。
I nt e g r a t e d de s i g n o f t a r g e t d e t e c t i o n s y s t e m b a s e d o n ma r i ne da t a b u o y
Z h o u J i n y u a n , Ta n g Yu a n g u a n g , Z h a o S h u d o n g
Abs t r a c t : By a d di n g a c ous t i c a r r a y d e t e c t i o n s y s t e m a nd p a no r a mi c v i de o de t e c t i o n s ys t e m o n 1 0 m
及 视 频 图像 数据 的 采集 , 由浮 标上 加 载 的高速 数 据传 输 卫 星 实现 大容 量 浮标 采集 数 据 向岸基
的可 靠传 输 ; 在 我 国特定 海 区开展 维权 执 法 目标 探 测 识别 与信 息 传 输 技 术集 成 三位 一体 的信
息 综合 监视 示范应 用 , 以提 升我 国全 天候 探 测 、 获取 海洋 侵权 目标 的能 力 关键 词 : 海 洋科 学 ; l O m 大 型 浮标 ; 声 阵列 ; 视频 ; 探测; 系统 集成 中图分 类 号 : P 7 1 6 文献 标 识码 : A 文章 编号 : 1 0 0 6 — 0 o 9 X( 2 o 1 3 ) o 2 — 0 0 7 3 — 0 4
FZF2_3型海洋资料浮标系统数据采集处理_控制及传输系统
第17卷 第2期1998年6月 海 洋 技 术OCEAN T ECHNOLOGYVol.17,No.2June,1998FZF2-3型海洋资料浮标系统数据采集处理、控制及传输系统张喜验(山东省科学院海洋仪器仪表研究所,青岛266001)摘 要 本文主要介绍F ZF2-3型海洋资料浮标的核心部分——数据采集处理、控制及传输系统的结构及组成,以及各部分的特点和关键技术。
关键词 浮标 采集 处理 控制 传输1 前言数据采集处理、控制及传输系统是整个FZF2-3型海洋资料浮标系统的核心部分,它的心脏部分是由美国国家半导体公司生产的工业档低功耗微处理器系统N SC-800组成,外部配备相应的接口电路、信号调理电路及控制电路。
资料传输系统采用INM ARSAT-C/GPS海事卫星数传设备,定时将浮标测量的数据资料传回接收岸站。
系统由标准时钟板提供时间控制序列信号,完成对各项观测项目的数据采集、数据处理、加电控制以及资料传输等任务。
2 系统组成微处理器系统是根据整个系统任务的要求,选择相应的功能板组成。
FZF2-3型海洋资料浮标数据采集处理、控制及传输系统的组成原理框图如图 2.1所示,它主要包括以下几个部分:(1)主控CPU板—CIM-804CPU板平常处于连续加电工作状态,只要系统上电,系统程序便自动进入浮标工作主程序,不断监视系统工作状态,并按照时间顺序进行数据采集、加电控制、资料处理以及资料传输等工作。
(2)系统时钟板—CIM-510系统时钟板为浮标控制系统提供高精度的时钟信号,包括年、月、日、时、分、秒信号以及收稿日期:1998-02-131/100s 、1/1000s 信号等,同时还具有润年自动调整功能。
系统时钟可发出0.5s 定时中断信号以及预定时间到中断信号,提醒CPU 进入相应的采集处理工作程序。
系统时钟处于不断电连续工作方式。
图2.1 数据采集处理、控制及传输系统组成原理框图 (3)CPU 接口芯片—N SC810CPU 接口芯片提供两个8位的输入、输出控制端口以及一个计数器输入端口和一个频率量测量端口,主要用于外围设备的加电控制,风速信号采集,门开启、舱进水、锚灯灭报警的监视等。
海洋信息综合采集系统设计
海洋信息综合采集系统设计王良成谢晓媛(三亚学院,海南三亚572000)[摘要]系统由数据采集节点、路由器节点和协调器节点构成,数据采集节点采用分布式自组织网络结构,实现对水体温度、pH值、溶解氧、电导率等水质参数的检测;路由器节点完成对水质参数无线传输平台的搭建,实现数据和命令的上传下达,并对系统的异常状态进行报警;协调器节点通过人机交互界面对数据进行处理、存储和分析,实现水质的远程监控。
利用时间同步算法,实现全网节点的同步体眠和唤醒,大大降低了系统功耗。
[关键词]海洋信息;Zigbee;水质监测中图分类号:TP274.2文献标识码:A文章编号:1008-6609(2019)01-0020-051引言我国海洋面积广阔,蕴藏着丰富的石油资源、天然气资源、渔业资源,在这些资源的开发和利用的同时必然会带来各种环境问题。
环境污染与自然资源的破坏对海洋的影响很大,如何有效监管监测是政府主管部门的重要工作。
单凭巡逻、事后举报等方式不但使信息滞后,而且带来了更多的后续修复难题。
因此,及时有效地发现海洋环境信息变化就变得尤为重要,通过实时监测海洋信息的变化,设置关键指标的上限值,在污染海域发生超过指标的作业或者不法行为能够及时预警。
本系统基于这种需要,设计了一个能够自动实时报警的海洋综合信息采集平台,实时采集监测海域的各种海洋信息数据,及时汇总分析并处理,供海洋环境管理部门使用。
鉴于海洋信息在海洋环境监测领域的重要性,提出一套实用、经济、易操作的在线水质监测系统显得尤为重要。
近几年,无线网络通信技术正在突飞猛进地发展,Zigbee技术因其成本低、传输效率高、功耗低等优点[1],有利于通过无线传感器网络搭建一个实时在线式水质监测系统。
因此,基于Zigbee 的无线水质在线监测系统的研究就显得尤为重要了,它既丰富了Zigbee无线通信技术理论的研究内容,同时为Zigbee 系统在水产养殖领域的应用提供了可行性方案。
基于CAN总线的海洋平台设备状态检测系统
( 井平 台 、采油 平 台 、修 井 平 台 和 动 力 平 台等 ) 钻 已有近 百 台。 因海 洋平 台及 设备 不可 靠而 引起 的故
障频繁 发生 , 洋平 台倾 复 和爆 炸造 成机 毁人 亡 的 海
事 故也偶 有 发生 。提 高海 洋 平 台及设 备 的可 靠 性 , 确 保海 洋作业 安全 的问题 日益 突 出。海洋 平 台涉及 机 械 和人身 安全 的设施 或设 备应 当定 期进 行强 制性
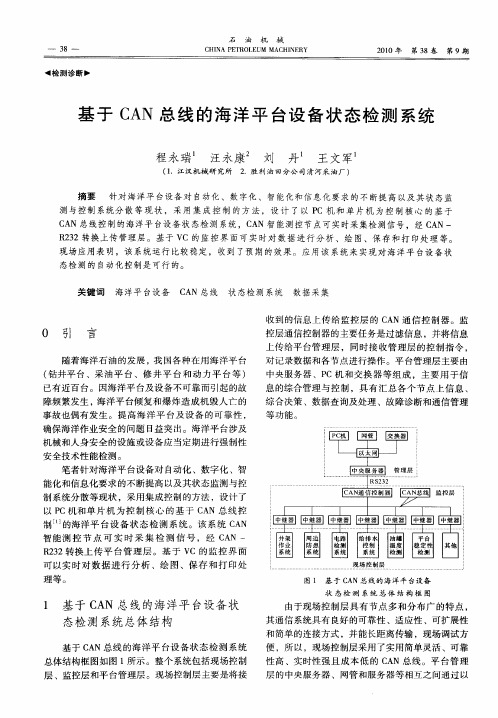
现场 应用表 明 ,该 系统运 行 比较 稳定 ,收到 了预 期 的效 果 。应 用该 系统 来 实现 对海 洋平 台设备 状 态检 测 的 自动化控 制是 可行 的。 关 键词 海洋平 台设 备 C N总线 状 态检测 系统 A 数据 采集
收到 的信 息上 传 给 监 控层 的 C N通 信控 制器 。监 A
理等。
现场 控制层
图 l 基 于 C N 总 线 的 海 洋平 台设 备 A
状 态检 测 系 统 总 体 结 构 框 图
1 基 于 C N 总 线 的海 洋 平 台设 备 状 A 态检 测 系统 总体 结 构
基 于 C N总线 的海 洋平 台设 备 状 态检 测 系统 A
由于现场 控制 层 具 有节 点 多 和分 布 广 的 特点 , 其 通信 系统具 有 良好 的可 靠性 、适应性 、可 扩展性 和简单 的连接 方式 ,并能 长距离 传输 ,现场 调试方 便 ,所 以 ,现 场控 制层采 用 了实用 简单灵活 、可靠 性 高 、实时性 强 且 成 本低 的 C N总 线 。平 台管 理 A 层 的中央服务 器 、网管 和服务 器等 相互之 间通过 以
石 油
一
机
械
38 一
C IAP T O E M M C IE Y HN E R L U A HN R
基于CAN总线船舶数据采集模块的设计与实现

在汽车制造过程中,需要对各种传感器数据进行实时采集和处理。我们可以通 过设计一个基于CAN总线的数据采集节点,实现从各个传感器中采集数据,进 行处理后传输到数据中心进行分析和监控。这种应用场景中,节点的高可靠性 和实时性是至关重要的,可以确保汽车的制造质量和生产效率。
本次演示介绍了基于CAN总线的数据采集节点的设计及其应用。首先,我们讨 论了为什么需要设计CAN总线数据采集节点,并介绍了CAN总线的背景和意义。 接着,我们从硬件和软件两个方面详细阐述了如何设计一个基于CAN总线的数 据采集节点。然后,我们介绍了节点的主要功能,包括数据采集、处理、存储 和传输。最后,我们通过一个实际应用案例展示了节点在实际应用中的效果和 优势,并展望了未来的发展方向。
可扩展性方面:该模块采用了开放式架构设计,可以方便地与其他设备进行连 接和扩展。此外,该模块还支持多种不同的数据接口和协议,能够满足不同用 户的需求。
讨论
实验结果表明,该基于CAN总线的船舶数据采集模块具有较高的准确性和稳定 性。其原因在于:首先,该模块采用了高精度的传感器和先进的信号处理技术; 其次,该模块对异常数据处理进行了优化;最后,该模块采用了高效的通讯协 议和数据处理算法。
CAN总线是一种串行通信协议,被广泛应用于汽车、工业控制、智能家居等领 域。它具有高可靠性、实时性、灵活性和扩展性等特点,使得我们能够轻松实 现设备之间的信息交互和协同工作。在很多情况下,我们需要将这些设备中的 数据采集上来,进行处理、分析和显示。因此,设计一个基于CAN总线的数据 采集节点具有重要意义。
研究现状
CAN总线是一种控制器局域网,具有高可靠性、实时性和灵活性,被广泛应用 于汽车、工业控制等领域。分布式数据采集系统是指将多个数据采集节点分布 在不同地理位置或网络中的一种数据采集方式,具有灵活性、可扩展性和实时 性等特点。
海洋环境综合数据采集器的研究与设计
海洋环境综合数据采集器的研究与设计作者:孟祥卫潘洪军毕振波王少华来源:《农村经济与科技》2018年第01期[摘要]随着以海洋为基础的产业蓬勃发展,海洋环境的变化受到越来越多的关注。
针对海洋环境监测工作的实际需要,设计了基于STM32开发板的一种海洋环境综合数据采集器。
该采集器通过对多种传感器的数据采集获得海洋环境数据,并使用GPRS通信模块进行数据的传输。
经过测试表明,其具有成本低、运行稳定、维护简单方便的他点,具有较大的应用价值和前景。
[关键词]海洋环境;STM32;传感器;GPRS[中图分类号]TP368.2 [文献标识码]A1 引言随着海洋经济的不断发展,与海洋有关的科学和技术变得越来越重要。
为了开发和利用海洋资源,我们必须首先了解海洋,全面监测海洋。
海洋环境监测就是海洋环境数据的采集,其基本任务是获取温度、湿度、水温、风速、波浪等水文气象信息。
经过几十年来的努力,国内的海洋环境数据采集设备已经取得了很大成果,但在数据采集、数据存储、网络通信方面还存在一些不足。
针对这一状况,本文设计了一款海洋环境综合数据采集器,以STM32F407为核心搭载多种传感器进行数据采集,并通过GPRS模块将数据传输到上位机,方便数据分析存储。
2 总体设计系统总体结构如图1所示。
海洋环境综合数据采集器主要包括STM32F407芯片、GPRS 模块、数据采集模块、存储模块等多个模块。
STM32F407处理器作为整个采集器的控制核心,负责完成数据传输、数据的多路采集、数据存储、人机交互等控制功能。
首先,数据采集模块对传感器进行数据采集,并通过GPIO 口把采集的数据传送到STM32芯片,并实时显示在LCD显示屏上。
STM32控制模块通过GPRS通信模块与上位机联系,传输数据并接收上位机指令。
当GPRS通讯模块出现故障时,将采集到的数据存储在存储模块,待故障排除后,恢复向上位机传输数据。
加入LCD显示屏和键盘操作等人机互动功能有助于采集器的现场安装和调试方便,可以对采集器工作方式进行选择、对水文气象数据的报警值进行设定等。
声纳浮标信号采集系统设计与关键技术研究

参考内容
相控阵三维摄像声纳系统在许多领域都有广泛的应用,如水下机器人、无人驾 驶车辆、医学影像分析等。这种系统的核心是由一组阵列元素组成的相控阵列, 通过控制每个阵列元素的相位和振幅,可以生成具有特定形状和方向的声波束, 从而实现声纳的扫描和成像。
相控阵三维摄像声纳系统的信号处理关键技术是实现其高性能和高精度的关键。 下面将介绍一些关键的技术手段:
1、信号同步技术:为了获取清晰的声纳图像,需要保证各个阵列元素接收到 的信号同步。这可以通过在发射信号时加入同步码,然后在接收信号时通过解 码同步码来实现。
2、信号去噪技术:由于环境噪声和自身噪声的影响,接收到的信号往往存在 大量的噪声。为了获得清晰的声纳图像,需要采用信号去噪技术。常见的去噪 方法包括滤波去噪、统计去噪、小波去噪等。
海水的温度可以通过测量声波在水中的传播速度来推算。因为声波在海水中的 传播速度与海水的温度密切相关。通过测量声波的传播速度,可以推算出海水 的温度。
3、观测海面气压
海水的密度与海面气压密切相关。当海面气压升高时,海水的密度会增加。因 此,通过测量海水的密度,可以推算出海面气压。
三、声纳浮标技术的优势和局限 性
谢谢观看
5、系统集成技术:为了实现声纳浮标信号采集系统的整体功能,需要将各个 模块进行集成。因此,需要研究有效的系统集成技术,提高各个模块之间的兼 容性和协同性。例如,可以采用模块化设计方法,将各个模块进行标准化和模 块化设计,方便进行功能升级和维护。
六、结论与展望
本次演示主要探讨了声纳浮标信号采集系统的设计原则、系统架构、信号处理 方法以及关键技术的实现。通过研究有效的抗干扰技术、数据处理算法优化技 术、通信协议设计技术、电源管理技术和系统集成技术,可以进一步提高声纳 浮标信号采集系统的性能和质量。未来,随着海洋探测技术的不断发展,声纳 浮标信号采集系统将会面临更多的挑战和机遇。因此,需要不断进行技术创新 和研发工作,推动声纳浮标信号采集系统的持续发展。
用于海洋浮标的多串口数据采集系统设计
洋资源的开发投入。
通过海洋水文气象的观测能够帮助人们更好的分析了解海洋环境的变化规律,为海洋资源开发、预防海洋灾害等方面提供科学依据。
海洋浮标是一种能够实现实时、自动、全天候海洋观测的设备平台,是海洋观测中最重要、最可靠、最稳定的手段之一[1]。
随着我国“数字海洋”建设不断推进,海洋观测已进入到对海洋动力、大气、环境、突发事件等实行全天候立体观测阶段,海洋浮标从单一的气象浮标或水文浮标,发展到综合多参数浮标[2]。
海洋浮标所搭载的传感器数量也由几个增加到十几个。
为适应海洋浮标发展的需求,设计了一种用于海洋浮标的多串口数据采集系统。
1 多串口数据采集系统整体设计多串口数据采集系统包括供电模块、数据采集模块和无线传输模块组成。
供电模块用于各传感器的电源管理,当传感器不工作时关断传感器电源减少电量消耗。
数据采集模块是浮标的控制中心,用于采集各个传感器的输出数据、监控浮标的状态信息。
无线传输模块用于发送浮标采集的各个传感器的数据,实时发送到网站接收平台,实现浮标的实时采浮标大多采用蓄电池加太阳能充电板的供电方式,当白天阳光充足时,太阳能充电板给浮标系统提供电量的同时将多余的电量冲入蓄电池,当夜晚无阳光时,使用蓄电池的电量给浮标供电,这种供电方式决定对系统的整体功耗要求比较高,所以供电模块采用低功耗设计。
供电模块主要包括电压转换电路和开关控制电路两部分。
电压转化电路将蓄电池输出的标称为12V的电压转化为5V和24V输出,满足不同传感器的供电需求。
选用的电压转化电源具有高转化效率、宽电压输入、输出短路保护、高可靠性等功能,能够满足海上恶劣的使用环境和低功耗的要求。
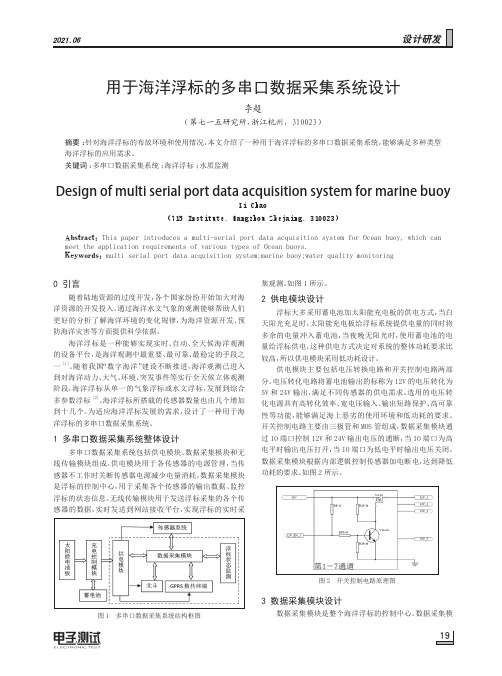
开关控制电路主要由三极管和MOS管组成,数据采集模块通过IO端口控制12V和24V输出电压的通断,当IO端口为高电平时输出电压打开,当IO端口为低电平时输出电压关闭。
数据采集模块根据内部逻辑控制传感器加电断电,达到降低功耗的要求。
如图2所示。
图2 开关控制电路原理图3 数据采集模块设计数据采集模块是整个海洋浮标的控制中心。
海洋观测浮标通用技术要求整理试行.doc

海洋观测浮标通用技术要求整理试行.doc精品资料海洋观测浮标通用技术要求(试行)1范围本要求规定了海洋观测浮标的系统组成、技术要求、检验方法及标志、包装、运输和贮存的要求。
本要求适用于海洋观测网业务化应用的海洋观测浮标的采购、检验和评估。
2规范性引用文件下列文件对于本文件的应用是必不可少的。
凡是注日期的引用文件,仅所注日期的版本适用于本文件。
凡是不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
CB/T 3855 海船牺牲阳极保护阴极设计和安装GB/T 13972-2010 海洋水文仪器通用技术条件GB/T 14914 海滨观测规范HY/T 143-2011 小型海洋环境监测浮标HY/T 142-2011 大型海洋环境监测浮标3 术语和定义3.1 海洋观测浮标锚泊在特定海区对该海区的水文、气象等要素进行定点、自动、长期、连续观测并定时发送资料的浮标。
3.2浮标检测仪一种配备浮标专用检测软件,可对浮标进行工作参数设置及功能检测的设备。
3.3浮标接收岸站接收海洋观测浮标发送或者通过数据平台中转的测量数据的地面接收设备和设施。
4系统组成4.1基本组成海洋观测浮标由浮标体、数据采集器、安全系统、浮标检测仪、传感器、通信系统、供电系统、锚系、浮标接收岸站(以下简称岸站)九部分组成。
4.2浮标体为浮标提供浮力支撑,同时也作为仪器搭载平台,由塔架、标体、配重组成。
精品资料按照设定的工作时序,自动采集、处理、存储观测数据,并将处理后的数据通过无线通信方式实时发送到岸站。
4.4安全系统具有警示、防雷、发现浮标移位、开舱、进水的功能,由雷达反射器、避雷针、卫星定位系统、开舱、进水传感器组成。
4.5浮标检测仪对浮标进行设置、调试和检测。
4.6传感器包括风、空气温度、相对湿度、气压、水温、盐度、波浪、海流传感器等。
4.7通信系统采用短波、超短波、蜂窝移动通信或卫星等通信方式,将观测数据传输到岸站,由天线和通讯模块或一体化通讯设备组成。
海洋维权执法浮标信息采集系统的CAN总线设计
海洋维权执法浮标信息采集系统的CAN总线设计唐原广;刘晓;王朋朋【摘要】The marine development and detection has far⁃reaching significance for the development of China's economy due to her vast maritime territory. Ocean data buoy is one of the main means for marine environment monitoring and marine disasters forecast. It has the characteristics of all⁃weather,long⁃term continuous and fix⁃point monitoring. A data acquisition system based on CAN bus was designed according to the characteristics of ocean buoy for safeguarding legal rights and field bus technology. The experiment shows that the application of CAN bus provided a new acquisition method for the data acquisition system of tradi⁃tional ocean buoy. It has constituted a system with high reliability and maintainability.% 我国的海上疆土非常的辽阔,海洋开发和海洋探测对于我国经济的发展具有深远的意义。
海洋资料浮标是海洋环境监测与海洋灾害预报的主要手段之一,具有全天候、长期连续、定点监测的特点。
基于CAN总线的海洋水文气象自动观测系统的设计的开题报告
基于CAN总线的海洋水文气象自动观测系统的设计的开题报告一、选题背景海洋是人类生存和发展的重要资源,具有广袤无垠、资源丰富、气候温和等特点,但也是诸如海浪、洋流、风暴、海啸等自然灾害的源头,造成重大的经济损失和人员伤亡。
为了更好地了解海洋的物理、化学和生态环境,保护海洋生态系统和开发利用海洋资源,需要进行海洋观测。
海洋水文气象自动观测系统是一种能够实时、准确、连续地对海洋环境进行监测和数据采集的设备,具有自动化、可靠性和高精度等优点,被广泛应用于海洋观测和环境保护领域。
CAN总线是一种串行通信总线,具有高速传输、抗干扰性强、可靠性高等特点,已被广泛应用于汽车电子控制系统、工业自动化等领域。
本课题将运用CAN总线技术设计一种海洋水文气象自动观测系统,实现海洋环境数据的实时采集和传输,为海洋环境监测和海洋资源开发提供支持。
二、选题意义1. 提高海洋环境监测数据质量和效率传统的海洋环境监测方式通常采用人工观测和手动记录,人工费时费力,且数据质量容易受到人为因素的影响,难以满足海洋环境监测的需求。
采用基于CAN总线的自动观测系统,可实现对海洋环境的自动化实时监测和数据采集,提高数据质量和效率,为海洋环境保护和海洋资源开发提供有力的支持。
2. 推动海洋科学研究和海洋经济发展海洋是地球上最为广阔的领域之一,了解海洋环境和变化对于海洋科学研究和海洋经济发展都具有重要的意义。
基于CAN总线的海洋水文气象自动观测系统可以提供实时、准确、连续的海洋环境监测数据,为海洋科学研究和海洋经济发展提供有力的支持。
三、研究内容1. 确定海洋环境监测指标和参数针对海洋环境监测需求,确定需要监测的指标和参数,包括海水温度、盐度、水压、流速、风速、风向等。
2. 设计基于CAN总线的海洋水文气象自动观测系统硬件结构设计基于CAN总线的海洋水文气象自动观测系统硬件结构,包括传感器模块、采集模块、控制模块和通讯模块等。
3. 编写海洋水文气象自动观测系统软件编写海洋水文气象自动观测系统软件,实现对传感器数据的采集、处理和传输。
海洋渔政船通信设备配备规范(试行)
海洋渔政船通信设备配备规范(试行)(2012 年11 月)目录1主要内容和适用范围2规范性引用文件3术语和定义3.射频识别(RFID)系统设备13.2 渔政船北斗报务通信系统3.3 渔政船北斗移动监控指挥系统3.3.4 渔政船卫星宽带数字通信系统3.3.5 CDMA船载移动基站3.6电子海图导航仪3.7视频采集传输系统4配备定额及要求4.1配备定额4.4.2配备说明5.4.3配备要求5.1主要内容和适用范围本规范规定了海洋渔政船(艇)通信设备的配备定额及要求。
2规范性引用文件凡是注日期的引用文件,仅所注日期的版本适用于本文件。
凡是不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
GB/T 18766 奈伏泰斯系统技术要求GB/T 18913 船舶和航海技术航海气象图传真接收机GB/T 20068 船载自动识别系统(AIS)技术要求JT/T 629 Ku波段车/船载卫星电视接收站SC/T 6070 渔业船舶船载北斗卫星导航系统终端技术要求SC/T 8002 渔业船舶基本术语SC/T 8145 渔业船舶自动识别系统B类船载设备技术要求YDC 014 800MHz CDMA 1X 数字蜂窝移动通信网设备技术要求:基站子系统〈渔业船舶法定检验规则》(2000 )《渔业船用调频无线电话机(27.50MHz〜39.50MHz )通用技术规范(试行)》农办渔[2007]41号)〈全国海洋渔业安全通信网CDMA通信系统规范》侬办渔[2007]42号)〈渔船动态监管信息系统平台技术规范(试行)》(农办渔[2010]95号)3术语和定义SC/T 8002、〈渔业船舶法定检验规则》中界定的以及下列的术语和定义适用于本文件。
. 学习参考 .3.1射频识别(RFID)系统设备利用RFID技术和后台管理数据库,远距离读写渔船电子标签或近距离读写IC 卡信息的渔船身份自动识别系统设备,包括电子标签(标示牌)、标签阅读器(读写器)以及数据存储处理设备。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
海洋维权执法浮标信息采集系统的CAN总线设计
作者:唐原广刘晓王朋朋
来源:《现代电子技术》2013年第10期
摘要:我国的海上疆土非常的辽阔,海洋开发和海洋探测对于我国经济的发展具有深远的意义。
海洋资料浮标是海洋环境监测与海洋灾害预报的主要手段之一,具有全天候、长期连续、定点监测的特点。
根据海洋维权执法浮标的特点,运用现场总线技术,设计了基于CAN 总线的浮标数据采集系统。
实验表明,CAN总线的应用为海洋维权执法浮标采集系统提供了一种新的采集方式,组成了一套总线化、模块化、高可维护性的系统。
关键词:通信; CAN总线;海洋浮标;数据采集
中图分类号: TN911⁃34 文献标识码: A 文章编号: 1004⁃373X(2013)10⁃0031⁃02
海洋维权执法浮标基于目前的大型海洋资料型浮标安装高清晰度图像采集系统和声学传感器阵列,定点获取关键海域的舰船信息,获取海洋侵权目标、提升全天候探测能力;分别研制基于浮标卫星和飞机卫星的高速数据实时传输系统,结合目标特征数据库,实现对侵权目标的特征识别和研判;综合集成上述传输技术、探测技术和分析研判技术等,在东海特定敏感区域开展维权执法目标探测识别与信息传输技术集成三位一体的信息综合监视示范应用。
但是,我国目前的海洋资料浮标信息采集系统仍存有许多不足之处:浮标信息采集系统实现对浮标内信息的集成,完成浮标上图像信息、水声信息、水文环境参数信息、浮标体安全参数信息的采集、存储和传输。
数据采集处理系统种类多,给使用和维护带来了极大的不便。
因此为克服传统浮标采集系统的不足,本文将CAN总线应于海洋维权浮标采集系统,主机和通讯机通过CAN总线相连,CAN总线数据通信具有可靠性、实性及灵活性的特点,因此解决了大型海洋浮标数据采集系统的扩展性差的缺点[1]。
浮标系统电气部分分为:电源系统、浮标信息采集系统、水下声阵列信息采集与识别系统、高清图像采集与识别系统、高速卫星通信系统、水文气象传感器和浮标体安全监控传感器。
1 CAN总线原理
CAN(Controller Area Network)[2]是一种用于实时应用的串行通信协议总线,是应用最广泛的现场总线之一。
CAN协议是在1986年由德国BOSCH公司开发的,由于其实时性、高性能、高可靠性等优点,随后也广泛应用于其他领域,如多种控制设备、交通工具、工业自动化、医疗仪器以及建筑、环境控制等。
CAN总线的通信介质可以是双绞线,光导纤维或者同轴电缆,传输速率可达1 Mb/s,传输距离可达10 km。
其特点概括如下:
(1)多主控制。
在总线空闲时,所有与总线相连的单元都可以向其他节点发送信息。
(2)自动关闭。
CAN总线可以判断出总线上错误的类型是暂时的数据错误(如外部噪声等)还是持续的数据错误(如驱动器故障、单元内部故障、断线等)。
(3)远程数据请求。
CAN总线可以通过发送“远程帧”,请求其他节点的数据。
高效的短帧结构。
每个数据帧数据域最长为8 B,传送短报文时效率高,高可靠性。
(4)非破坏性总线仲裁技术。
具有点对点、一点对多点及全局广播等多种传输方式。
当有多个节点一起向总线发送信息时,最高优先级的节点可以继续传输数据而不受影响,优先级低的节点会主动的退出发送。
(5)总线配置灵活。
2 CAN总线的设计
通讯板用于处理图像信息、水声信息和高速卫星通信的信息。
浮标通讯板是整个系统的控制枢纽,从通讯板的结构上可以可看出其功能。
通讯机来控制底板上主机电源的通断是通过电源控制接口实现的。
为了实现系统的即插即用提供软件支持因而选用即插即用接口。
通过海事卫星的网络接口,采集的图像和水声信息通过通讯机发送到岸站。
通讯板是数据通信最前端的部分,是浮标信息采集系统中非常重要的。
主机通过各种传感器将在一个周期内(通常是半个小时)采集各种数据,然后按照一定的格式存储到SD卡中[4]。
通讯机通过CAN总线发送数据收集命令,主机在规定的时刻接收命名,将采集并经过统计的数据通过CAN总线上传到通讯板。
主机上装有各种舱体状态检测传感器如舱温传感器、水警传感器、门警传感器,采集的水文气象数据会和舱温异常、舱门被非法打开等舱体异常信息一起通过CAN总线上传给通讯板,再通过卫星发送给岸站,实现浮标采集数据的实时显示、存储和转发功能。
3 结论
在此完成了CAN功能进程的设计与实现。
系统安装了水文气象传感器及浮标体安全监控传感器等。
基于海洋浮标低功耗及安全性的要求,系统由值守节点负责控制启动。
4 结语
本文创新地将CAN总线技术应用于海洋维权执法浮标信息采集系统中[10]。
通过CAN总线将主板和通讯板相连,并对软件和硬件进行了设计及测试。
实验证明这种对数据的实时采集与传送系统,提高了系统的可靠性,也具有实时性强、纠错能力强等特点,该系统的研制成功具有较高的实际应用意义。
参考文献
[1] 王晓燕,裴亮,付晓.基于CAN总线的浮标数据采集系统设计[J].微计算机信息,2008,24(14):20⁃21.
[2] 李真花,崔健.CAN总线轻松入门与实践[M].北京:北京航空航天大学出版社,2011.
[3] 张凤.现场总线技术与应用[M].北京:科学出版社,2008.
[4] 范寒柏,王少仙,彭安.大容量SD卡在海洋数据存储中的应用[J].单片机与嵌入式系统应用,2010(1):30⁃32.
[5] 邵贝贝.嵌入式实时操作系统μC/OS⁃Ⅱ[M].2版.北京:北京航空航天大学出版社,2009.
[6] 陈惠滨,陈仅星.嵌入式文件系统在移动数据采集器中的实现[J].电子器件,2005(9):608⁃611.
[7] 任哲.嵌入式实时操作系统μC/OS⁃Ⅱ原理及应用[M].2版.北京:北京航空航天大学出版社,2009.
[8] 宋岩.ARM Cortex⁃M3 权威指南[M].北京:北京航空航天大学出版社,2009.
[9] 马忠梅,徐琰,叶青林.ARM Cortex微控制器教程[M].北京:北京航空航天大学出版社,2010.
[10] 嵇斗,王向军.一种基于CAN总线技术的数据采集系统设计[J].微计算机信息,2005,21(2):37⁃39.。