COP-FLY-I组成原理实验指导书
尼克萨里鸟控制产品说明书

Effective Installations Don't Just Happen...They Are Planned.Thorough planning,proper instal-lation,follow-up maintenance in the first weeks and periodic inspection of the mounting sys-tem,are the keys to a successful plan for Nixalite Bird Control.Always study the building carefully .Nixalite must be installed on all areas where birds alight,roost or build nests.All areas above,from which birds can drop nesting materials,as well as areas where birds can fly above the installation to drop materi-als,must be protected with Nixalite.Even though stainless steel has a very low rate of corrosion or reaction with other metals,it is still recommended to apply a protective coating or sealer on dissimilar metal surfaces before installing Nixalite to prevent any gal-vanic action.When installing Nixalite in small pieces or on a complicated surface,cut and fit each piece carefully .Be patient and thorough when applying Nixalite,being sure to cover all con-tours and angles closely .Do not jam the Nixalite together .Before deciding on the proper amount of Nixalite to be used,there are some specific figures to consider .Take time to establish the proper position and amount of the Nixalite by referring to the Surface Depth and charts on .Too much Nixalite can be as ineffective as too little."Space-i-fication"page 4All exposed edges,as well as the inte-rior of flat surfaces,must be covered.On inside corners,particularly cornice returns and similarly protected areas,it may be necessary to make a screen or special device with Nixalite to close off the protected area.In some areas,the Nixalite should be installed both on the surface and upside down on the surface directly above.Nixalite can be used on pipes,sup-ports and similar areas.It is also used as a deterrent for climbing ani-mals,rodents and humans.Clean the surface thoroughly with a disinfectant.The scent of bird drop-pings can encourage the birds to come back.Birds will fight hard to retain their old roosts.Before installing Nixalite remove all overhanging branches and similar foliage where birds can land to drop nesting materials.A free consultation service is pro-vided by our planning depart-ment.Submit drawings with exact measurements for recommendations.On site consultation is available by request.However ,there is a charge for this service.In cases where the accumulation ofQuestions About Y our Installation?Ph:800-624-1189or 309-755-8771Fax:800-624-1196or 309-755-0077E-mail:*********************Website:www For your protection ,wear goggles,gloves and a protective mask to help protect you against the health haz-ards associated with the bird debris.bird dung is heavy ,it may be neces-sary to use a bactericide to kill the dis-ease carrying bacteria.1.Carefully measure the depth and length of the surface,then refer to the Surface Depth Specification Charts page 4on for the number of rows needed.It is sometimes necessary to measure for height clearance when installing Nixalite in tight spaces.Proper placement and quantity of Nixalite starts with accurate mea-surements of the surface.Installing Nixalite StripsNOTE:Make sure the dimensionsyou record are accurate .Do not guess or estimate dimensions from a distance.Accurate dimensions are essential for an effective Nixalite installation.The Guide To Success121819gaw - new mhdBefore installing the Nixalite strips into the mounting hard-ware,there are some important guidelines that must be followed.2.Do not leave gaps in the Nixalite coverage.Cover all possible land-ing areas above,behind or next to the installation areas.1.Be sure the Nixalite strips will fit the area properly .The Nixalite base strip must follow the installa-tion surface closely .3.At the exposed ends of a surface ,run the strips over the ends.Make sure the of the strip is the or wire at all exposed surface ends.Make sure the strip wires extend at least over the outside edges.1/2"tallest wire first last 1/4"2.Mark where the Nixalite base strip will be positioned.To help you space the Nixalite on the surface correctly ,refer to the "Space-i-fications "chart on page 4.Steel or IronMounting Hardware InstructionsAll Nixalite mounting hardware is made of high grade stainless steel or weather resistant materials. If you have any questions or need more information, contact Nixalite or go to .4.Slip Nixalite base strip into mount-ing clips.3.Drive flush with hammer .MasonryWood &Sheet Metal4.Slip Nixalite base strip into mount-ing clips.1.Drill 11/64"diameter holes,at least 1/2"deep or through the steel.2.Blow out debris,insert anchors.3.Insert sheet metal screws through the mounting clips and drive flush into anchors with a screw driver .1.If necessary ,make small guide holes with a drill,punch,etc.2.Insert stainless steel sheet metal screw through the mounting clip and washer (in that order ,top to bottom).1.Drill 3/16”diameter holes,1"deep.4.Slip Nixalite base strip into mount-ing clips.Optional:Fill drilled holes with silicone sealer before installing hardware.This provides protection against water damage2.Insert stainless steel drive screws with mounting clips and washers (in that order ,top to bottom)into drilled holes.Fill drilled holes with silicone sealer before inserting anchors.This provides protection against water damage.Optional:Use the Mounting HardwareSpacing Chart on page 4to find the proper mounting hardware spacing.e a screw driver to drive screws,clips and washers flush to surface.The "hook"end of the mounting clip should point to the closest out-side edge of the surface.e the Mounting HardwareSpacing Chart on ,to deter-mine the proper mounting hard-ware spacing.Make a mark for each mounting hardware unit,or use an installation template.Call Nixalite for installation template details.page 43.Mounting hardware is installed 7/8"from Nixalite base strip.Mark the surface where the mounting hardware units are to be placed.MasonryWood/Sheet MetalNixalite Mounting Hardware UnitsQuestions About Y our Installation?Ph:800-624-1189 or 309-755-8771 Fax:800-624-1196 or 309-755-0077Wire Tie and Adhesive2.Apply adhesive to the bottom of the Nixalite base strip and to the installation surface.Recommended for fastening the Nixalite strips to suspended struc-tures,such as pipe,cables,etc.Follow the adhesive manufacturers direc-tions printed on the container .1.Clean the surface thoroughly ."Non-removable"Method1.Clean the surface thoroughly .2.By following manufacturers direc-tions printed on the adhesive con-tainer ,apply adhesive to surface where clips are to be attached.Put clips into the adhesive,making sure not to get any adhesive into the hook end of the clip.The clip hook should point to the closest out-side edge of the surface.3.Cover the eyelet end of the clip with adhesive.Make sure not to get adhesive into the hook end of the mounting clip.5.It is absolutely necessary to allow the adhesive holding the mounting clips to cure for at least 24hours before inserting the Nixalite strips.Removable MethodKeeping TabsWhen the use of supplied mounting hardware is not possible,a removable adhesive installation can be done.However ,it is recommended to use one mounting hardware unit at each end of the Nixalite strip to ensure solid mounting.1.Clean the surface thoroughly .2.By following manufacturers direc-tions printed on the adhesive con-tainer ,apply adhesive to surface where clips are to be attached.Put clips into this adhesive,making sure not to get any adhesive into the hook end of the clip.The hook end of clip should point toward the closest outside edge of the surface (see sketch #2at left).3.Cover the eyelet of the mounting clip with adhesive making sure not to get adhesive in the hook end of the clip (see sketch #3at left).4.It is absolutely necessary to allow the adhesive holding the mounting clips to cure for at least 24hours before inserting the Nixalite strips.By setting up a bi-annual visualinspection of the installation,you can keep an eye out for any debris that may get caught in the needles of the strips.Also inspect the mounting hard-ware system at this time.This allows re-securing the strips in the unlikely event that the strips have come loose from the hardware.Bear in mind that the birds may fight to retain their nesting and roosting places.Credit the birds for being cun-ning,persistent and tenacious.Sufficient Nixalite must be installed to do the job effectively .Careful observa-tion before the installation is neces-sary to locate all the problem areas.Remember that birds will try to drop sticks and other nesting materials into the Nixalite in an attempt to.....continued next pageIn Closing...3.Press the Nixalite strip into the sur-face adhesive.4.Wrap the wire tie around the strip and the suspended surface.Twist the loop ends with wire tying tool until tight.Space the wire ties in accordance with the Mounting Hardware Spacing Chart on page 4of this guideline.Adhesive Installation InstructionsWhen the use of supplied mounting hardware is not possible,an adhesive installation can be done.It is recom-mended to use one mounting hard-ware unit at each end of the Nixalite strip to ensure solid mounting.Always follow instructions printed on the adhesive container .4.After the adhesive holding the clips has cured,apply adhesive to the bottom of the Nixalite base strip and the installation surface.Slip the Nixalite strip into the mounting clips.For More Information or Planning AssistanceE-mail:*********************Careful thought and planning are required to make the installation suc-cessful.We can furnish the material,render it useless.That is why the areas above the installation must be pro-tected with Nixalite strips.but it must be installed with skill and ingenuity .Naturally ,since there are so many dif-ferent factors to be considered,we make no warranties,guarantees or representations,expressed or implied.Surface Depth Specification ChartsDetails to Remember:Nixalite "Space-i-fication" ChartsMounting Hardware Spacing Chart*½row indicates the use of Model H Nixalite.Whole number indicate the use of full row models S Nixalite.charts apply to .If using Model W ,review the Installing Model W Nixalite pages from Nixalite.Download this brochure from www or contact Nixalite for a free copy .NOTE:Model W Nixalite DO NOT A Always measure from the of the Nixalite base strip.center C1¾”(4.4cm)max.from the outsiderow .B5”(12.7cm)max.and 3½”(8.9cm)min.between two rows of Nixalite.2½”(6.4cm)max.and 2”(5.1cm)min.between models H and S Nixalite.E Extend Nixalite base strip at least ½”(1.3cm)over ends of surface.D 2¼”(5.7cm)max.from inside wall to the center of the inside row of Nixalite.FNixalite needles must extend over the outside edge at least ¼”(0.6cm).48"6units -one at each end,four spaced evenly between 16"2units -one at each end.Strip length Mounting Hardware Spacing12"2units -one at each end.24"3units -one at each end,one inmiddle Outside Corners &Exposed Edges:At outside corners,space the strips as shown below .At exposed ends,the tallest wire of the strip is always the first and/or last wire.Make sure there are no gaps where Nixalite strips meet walls or other objects,or where two Nixalite strips butt together end-to-end.Gaps:When two Nixalite strips are butted together in a row ,make sure the Nixalite wire pattern continues from one strip to the next strip.No gaps.Butting Strips:Single ExposedSurface DepthInchesCentimetersRows Required 8.5 - 13.50 - 3.53.5 - 5.55.5 - 8.513.5 - 18.518.5 - 23.523.5 - 28.528.5 - 33.533.5 - 38.538.5 - 43.534.3 - 47.00 - 8.98.9 - 14.014.0 - 21.621.6 - 34.372.4 - 81.597.8 - 110.547.0 - 59.759.7 - 72.481.5 - 97.8 3 rows 1 row 6 rows 7 rows 9 rows4 rows 8 rows 2 rows5 rows 1½ row*½ row*1 row 4 rows 2 rows 8 rows1½ rows 3 rows 6 rows 7 rows 5 rows 73.7 - 86.45.2 - 10.20 - 5.161.0 - 73.710.3 - 15.322.9 - 35.635.6 - 48.348.3 - 61.086.4 - 99.115.3 - 22.90 - 22 - 44 - 66 - 99 - 1414 - 1919 - 2429 - 3424 - 2934 - 39Double ExposedSurface DepthInchesCentimetersRows Required Need Help?U.S.\Canada - Ph:800-624-1189 Fax:800-624-1196E-mail Web :******************: Nixalite is open 8:00 a.m. to 4:30 p.m. Central Time,Monday through Friday . Fax or E-mail anytime.International - Ph:309-755-8771 Fax:309-755-0077Never use less than 2hardware units per strip,no matter how short the strip may be.Copyright© 2008 - 2019 by Nixalite® of America Inc. All rights reserved.Nixalite® is a registered trademark of Nixalite® of America Inc. Printed with pride in the .USA 1025 16th Avenue East Moline,. 61244IL Nixalite of America Inc®Experts In Architectural Bird Control Since 1950P_GuideToSuccess100219gaw .cdr - mhd new。
cop说明(教材)

过 程 方 法“关注于产品实现和过程方法是我们工作的方式。
我们认为,对于质量体系审核过于偏向基于逐要素进行评估的程序的抱怨是合理的。
我们这里所说的(汽车行业的“单独”的过程方法)是一种建立追踪审核的方法,这种审核基于从一致的顾客要求到操作工指导书,又返回到向顾客交付的产品的基准。
它与制造产品的业务的运作方式相关”。
过程根据我们所讨论过的,可以这样说:过程是向过程的顾客(内部的和外部的)提供产品或服务的增值活动链。
√过程具有由两端定义的开始和结尾在两端之间活动的链顾客导向的过程的分析公司和顾客之间的内部/外部接口定义组织的支持“单一/统一的过程方法”的顾客导向过程组织如何以一种单一的、统一的、可以理解的过程方法说明其所有的过程?正如迄今为止你所看到的,通过IA TF的工作,汽车行业已经提出了一种支持汽车(依赖于得到完善管理的供应链)的过程方法, COP方法是一种被推荐的方法,它不是IA TF要求必须使用的方法)。
COP(客户导向过程):指那些通过输入和输出直接和外部顾客联系的过程。
(如产品设计、合同评审、交付等)SP(支持过程):指支持COP过程实现的过程,可分为若干个层次。
(如人员培训、设备维护、品质检验等)MP(管理过程):指基于事实, 数据信息的收集, 分析, 然后做出决定的过程。
(如管理评审,内审,数据分析,持续改进等)定义组织的“单一/统一的过程方法功能分析范例:超级市场史密斯先生正在休假,今天下雨,他决定用大部分时间购物,现在他正在寻找超级市场。
史密斯先生从指路牌上看到一家名叫“不可思议的好吃”的超级市场就在街道的拐角处,就决定那里。
到达超级市场后,史密斯先生找到一个室内车库,这样可以使他的车不被雨淋湿。
然后史密斯先生开始寻找购物车,并在他的汽车附近找到一辆。
史密斯先生进入超级市场,开始寻找妻子要求他采购的物品。
他很容易就找到了它们,因为所有商品已经按类别划分,并有指示导向。
现在史密斯先生准备付款并开始排队。
实验一COP2000认识实验报告
实验一 COP2000认识实验【实验目的】1 熟悉COP2000实验箱组成及工作方式。
2 掌握实验教学软件的使用。
3本实验为验证性实验。
【实验要求】1 预习并总结组成原理的组成。
2 注意工作软硬件环境。
3 观察实验箱各部件。
4 熟悉教学软件。
【实验步骤】1 学习实验仪的硬件检测步骤2 学习并了解实验仪开关、指示灯、按键的使用方法3 学习实验仪与微机的连接及使用方法4 学习软件的使用方法5 练习实验仪键盘的使用【实验内容】一学习实验仪的硬件检测步骤1. 将IA的开关拨成“11100000”,将中断地址设成0E0H,J1接J2控制开关拨到“微程序”方向。
2.按住“RST”键不松,同时开机。
在显示屏有显示后,松开“RST”键。
3.实验仪进行自测,自测后,显示“1234”,分别按1、2、3、4键测试各LED灯的情况。
按1:检测各寄存器的LED,LED从右至左逐个点亮,8段管显示01-80数字。
按2:检测uM输出的LED,24位分三段,从右至左逐个点亮。
按3:检测各个寄存器输出LED(红色LED),循环点亮每个寄存器的输出LED。
按4:检测各个寄存器输入LED(黄色LED),循环点亮每个寄存器的输入LED。
4.手动检测键盘,将键盘每个键都按一次,显示屏会显示相应的键码。
5.检测24个开关,将开关上下拨动,观察灯是否有正确地变化。
6.将开关拨到“组合逻辑”方向,不按“RST”开机,按“EXEC”键运行程序,可以看到累加器A做加1运算,按“INT”键,产生中断,将累加器A的值输出。
7.将开关拨到“微程序”方向,不按“RST”开机,按“EXEC”键运行程序,累加器A开始加1,按“INT”键,将累加器A的值输出。
二学习并了解实验仪开关、指示灯、按键的使用方法实验仪上有寄存器组R0-R3、运算单元、累加器A、暂存器B、直通/左移/右移单元、地址寄存器、程序计数器、堆栈、中断源、输入/输出单元、存储器单元、微地址寄存器、指令寄存器、微程序控制器、组合逻辑控制器、扩展座、总线插孔区、微动开关/指示灯、逻辑笔、脉冲源、20个按键、字符式LCD、RS232口。
COP2000计算机组成原理实验系统

第一章性能特点COP2000计算机组成原理实验系统主要是为配合讲授与学习《计算机组成原理》课程而研制的。
与其它产品相比,具有以下特点:1.1 硬件先进特点1.实时监视器各单元部件都以计算机结构模型布局,清晰明了,各寄存器、部件均有8位数据指示灯显示其二进制值,两个8段码LED显示其十六进制值,清楚明了,两个数据流方向指示灯,以直观反映当前数据值及该数据从何处输出,而又是被何单元接收的。
这是该产品独创的“实时监视器”,使得系统在实验时即使不借助PC机,也可实时监控数据流状态及正确与否,彻底改变了其它实验设备为监控状态必须加入读操作的不真实实验方法,使得学生十分容易认识和理解计算机组成结构。
实验系统各部件可以通过J1、J2、J3座之间不同的连线组合,可进行各部件独立的实验,也可进行各部件组合实验,再通过与控制线的组合,就可构造出不同结构及复杂程度的原理性计算机。
2.开放式设计实验系统的软硬件对用户的实验设计具有完全的开放特性。
与众不同的是:COP2000各实验模块的数据线、地址线与系统之间的挂接是通过三态门,而不是其它实验设备所采用的扁平连线方法,而数据线、地址线是否要与系统连通,则由用户连线控制,这样,就真实的再现了计算机工作步骤。
需要强调指出的是:用“连线跨接”并不能说明其开放特性,而所谓的开放性应指的是运算器、控制器及微程序指定的格式及定义能否进行修改和重新设计。
COP2000系统的运算器采用了代表现代科技的EDA技术设计,随机出厂时,已提供一套已装载的方案,能进行加、减、与、或、带进位加、带进位减、取反、直通八种运算方式,若用户不满意该套方案,也可自行重新设计并通过JTAG口下载。
控制器微指定格式及定义可通过键盘和PC机进行重新设计,从而产生与众不同的指令系统。
系统的数据线、地址线、控制线均在总线插孔区引出,并设计了40芯锁进插座,供用户进行RAM、8251、8255、8253、8259等接口器件的扩展实验。
实验一COP2000认识实验报告
实验一COP2000认识实验报告摘要:一、引言COP2000是一款基于Windows操作系统的计算机模拟软件,可以用于学习计算机的组织结构和编程语言。
本实验主要通过使用COP2000软件,加深对计算机组织和编程的认识。
二、实验目的1.了解计算机的组成结构和基本原理;2.熟悉使用COP2000软件模拟计算机的组织结构;3.掌握汇编语言基本指令的使用;4.理解汇编指令的执行过程和寄存器的作用。
三、实验内容与方法1.实验环境:COP2000软件;2.实验步骤:(1)打开COP2000软件并创建一个新的项目;(3)编译并运行程序,观察指令的执行过程和结果;(4)通过查阅资料,了解各个指令的功能和寄存器的作用。
四、实验结果与分析我编写了如下的一段简单的汇编语言程序:```MOVAL,10;将10赋值给AL寄存器ADDAL,5;将AL寄存器的值与5相加MOVAH,AL;将AL寄存器的值复制给AH寄存器```在运行程序之后,我发现这段程序的执行结果如下:```AL=10AL=15AH=15```通过观察程序的执行结果,我得出了以下的结论:1.MOV指令用于将一个值赋给特定的寄存器,类似于变量赋值操作;2.ADD指令用于将指定的寄存器中保存的值与给定的操作数相加,并将结果保存到该寄存器中;3.汇编指令的执行顺序是按照程序的顺序依次执行的;4.寄存器的作用是用于暂存和传输数据,不同寄存器有不同的用途,在程序中可以根据需要选择合适的寄存器。
五、实验总结与体会通过本次实验,我对计算机的组织结构和编程语言有了更深入的了解。
我学会了使用COP2000软件模拟计算机的组织结构,并编写了一段简单的汇编语言程序。
通过观察程序的执行过程和结果,我对汇编指令的使用方法和寄存器的作用有了更清楚的认识。
然而,在实验过程中,我也遇到了一些困难。
首先,对于汇编语言的语法和指令集不够熟悉,导致在编写程序时出现了一些错误。
其次,我对一些指令的作用和寄存器的使用方法有一些疑惑,需要查阅资料进行了解和学习。
Co-IP详细教程

免疫共沉淀(Co-IP)详细步骤教程(转)------原理:免疫共沉淀(Co-Immunoprecipitation)是以抗体和抗原之间的专一性作用为基础的用于研究蛋白质相互作用的经典方法。
是确定两种蛋白质在完整细胞内生理性相互作用的有效方法。
其原理是:当细胞在非变性条件下被裂解时,完整细胞内存在的许多蛋白质-蛋白质间的相互作用被保留了下来。
如果用蛋白质X 的抗体免疫沉淀X,那么与X在体内结合的蛋白质Y也能沉淀下来。
目前多用精制的prorein A预先结合固化在argarose的beads上,使之与含有抗原的溶液及抗体反应后,beads上的prorein A就能吸附抗原达到精制的目的。
这种方法常用于测定两种目标蛋白质是否在体内结合;也可用于确定一种特定蛋白质的新的作用搭档。
其优点为:(1)相互作用的蛋白质都是经翻译后修饰的,处于天然状态;(2)蛋白的相互作用是在自然状态下进行的,可以避免人为的影响;(3)可以分离得到天然状态的相互作用蛋白复合物。
缺点为:(1)可能检测不到低亲和力和瞬间的蛋白质-蛋白质相互作用;(2)两种蛋白质的结合可能不是直接结合,而可能有第三者在中间起桥梁作用;(3)必须在实验前预测目的蛋白是什么,以选择最后检测的抗体,所以,若预测不正确,实验就得不到结果,方法本身具有冒险性。
二、准备工作:预冷PBS,RIPA Buffer,细胞刮子(用保鲜膜包好后,埋冰下),离心机1. 用预冷的PBS洗涤细胞两次,最后一次吸干PBS;2. 加入预冷的RIPA Buffer(1ml/107个细胞、10cm培养皿或150cm2培养瓶,5×106个细胞、6cm培养皿、75cm2培养瓶)3. 用预冷的细胞刮子将细胞从培养皿或培养瓶上刮下,把悬液转到管中,4℃,缓慢晃动15min(EP管插冰上,置水平摇床上)4. 4℃,14000g离心15min,立即将上清转移到一个新的离心管中5. 准备Protein A agarose,用PBS 洗两遍珠子,然后用PBS配制成50%浓度,建议减掉枪尖部分,避免在涉及琼脂糖珠的操作中破坏琼脂糖珠6. 每1ml总蛋白中加入100μl Protein A琼脂糖珠(50%),4℃摇晃10min(EP管插冰上,置水平摇床上),以去除非特异性杂蛋白,降低背景7. 4℃,14000g离心15min,将上清转移到一个新的离心管中,去除Protein A珠子8. (Bradford 法)做蛋白标准曲线,测定蛋白浓度,测前将总蛋白至少稀释1:10倍以上,以减少细胞裂解液中去垢剂的影响(定量,分装后,可以在-20℃保存一个月)9. 用PBS将总蛋白稀释到约1 μg/μl,以降低裂解液中去垢剂的浓度,如果兴趣蛋白在细胞中含量较低,则总蛋白浓度应该稍高(如10 μg/μl)10. 加入一定体积的兔抗到500μl总蛋白中,抗体的稀释比例因兴趣蛋白在不同细胞系中的多少而异11. 4℃缓慢摇动抗原抗体混合物过夜或室温2h,激酶或磷酸酯酶活性分析建议用2 h室温孵育12. 加入100μl Protein A琼脂糖珠来捕捉抗原抗体复合物,4℃缓慢摇动抗原抗体混合物过夜或室温1h,如果所用抗体为鼠抗或鸡抗,建议加2 μl"过渡抗体"(兔抗鼠IgG,兔抗鸡IgG)13. 14000rpm瞬时离心5s,收集琼脂糖珠-抗原抗体复合物,去上清,用预冷的RIPA buffer 洗3遍,800μl/遍,RIPA buffer有时候会破坏琼脂糖珠-抗原抗体复合物内部的结合,可以使用PBS14. 用60μl 2×上样缓冲液将琼脂糖珠-抗原抗体复合物悬起,轻轻混匀,缓冲液的量依据上样多少的需要而定(60 μl足够上三道)15. 将上样样品煮5min,以游离抗原,抗体,珠子,离心,将上清电泳,收集剩余琼脂糖珠,上清也可以暂时冻-20℃,留待以后电泳,电泳前应再次煮5min变性。
Co-IP原理与方法

免疫沉淀(Immunoprecipitation, IP)原理IP是利用抗原蛋白质和抗体的特异性结合以及细菌蛋白质的“protein A/G"特异性地结合到抗体(免疫球蛋白)的FC片段的现象开发出来的方法。
目前多用protein A/G预先结合在argarose beads上,使之与含有抗原的溶液及抗体反应后,beads上的prorein A/G就能达到吸附抗原的目的。
通过低速离心,可以从含有目的抗原的溶液中将目的抗原与其它抗原分离。
免疫沉淀实验的操作步骤比较多,同时由于在非变性条件下进行实验,所以要得到一个完美的实验结果,不仅需要高质量的抗体,同时对免疫沉淀体系也需要有严格的控制指标。
免疫沉淀实验从:蛋白样品处理;抗体-agarose beads孵育;抗体-agarose beads复基本实验步骤(1)收获细胞,加入适量细胞IP裂解缓冲液(含蛋白酶抑制剂),冰上或者4℃裂解30min, 12,000g离心30 min后取上清;(2) 取少量裂解液以备Western blot分析,剩余裂解液将1μg相应的抗体和10-50 μl protein A/G-beads加入到细胞裂解液,4°C缓慢摇晃孵育过夜;(3)免疫沉淀反应后,在4°C 以3,000 g速度离心5 min,将protein A/G-beads离心至管底;将上清小心吸去,protein A/G-beads用1ml裂解缓冲液洗3-4次;最后加入15μl的2×SDS 加样缓冲液,沸水煮10分钟;(4)SDS-PAGE, Western blotting或进行质谱分析。
一、样品处理:免疫沉淀实验成功与否,第一步处理样品非常关键。
免疫沉淀实验本质上是处于天然构象状态的抗原和抗体之间的反应,而样品处理的质量决定了抗原抗体反应中的抗原的质量,浓度以及抗原是否处于天然构象状态。
所以制备高质量的样品以用于后续的抗体-agarose beads孵育对免疫沉淀实验是否成功非常关键。
小飞机F1操作教练员教案

小飞机F1操作教练员教案1. 简介小飞机F1是一款迷你版的遥控直升机,适合初学者使用。
本教案是为了帮助教练员更好地指导初学者操作小飞机F1而设计。
2. 教学目标- 熟练掌握小飞机F1的基本操作方法- 理解小飞机F1的飞行原理- 能够在安全的范围内,自行操作小飞机F1进行简单的飞行3. 教学内容3.1 小飞机F1基本组成部分小飞机F1包含以下组成部分:- 机身- 叶片- 遥控器- 电池- 充电器3.2 基本操作方法1. 检查电池电量,确保电量足够进行飞行。
2. 打开遥控器电源开关,同时打开小飞机电源开关,等待小飞机自检完成。
3. 按下遥控器上的起飞按钮,小飞机开始起飞。
4. 通过遥控器上的方向键,控制小飞机向前、向后、向左、向右飞行。
5. 通过遥控器上的高度调节键,控制小飞机上升、下降。
3.3 飞行注意事项1. 飞行时,保持一定的高度和距离,以免碰撞。
2. 飞行过程中,应该时刻注意电量,避免电池耗尽。
3. 飞行前,检查小飞机和遥控器是否正常,确保安全。
4. 教学方法1. 以理论为基础,结合实际操作,让学生熟练掌握小飞机F1的基本操作方法和飞行原理。
2. 采用示范讲解法,让学生直观感受小飞机F1的操作过程。
3. 采用“由浅入深”的教学方法,逐步引导学生进行复杂的操作。
4. 通过练题和实际操作,巩固学生的知识点,提高操作能力和应变能力。
5. 教学效果评估1. 对学生进行小测验,测试其对小飞机F1的基本操作和飞行原理的掌握程度。
2. 观察学生的实际操作情况,评估其操作水平和安全意识。
通过本教案的学习,学生可以了解小飞机F1的基本组成部分、飞行原理和基本操作方法,同时能够在实际操作中提高操作能力和应变能力,为日后的操作打下基础。
计2011组成原理课程设计任务书

计算机组成原理课程设计任务安排一、课程设计的目的1. 在实验机上设计机器指令及对应的微指令(微程序),从而进一步掌握微程序设计控制器的基本方法并了解指令系统与硬件结构的对应关系;2. 通过控制器的微程序设计,综合理解计算机组成原理课程的核心知识并进一步建立整机系统的概念;3. 培养综合实践及独立分析、解决问题的能力。
二、课程设计的任务针对COP2000实验仪,首先通过综合实验了解该模型机微程序控制器原理(主要指熟悉该模型机指令/微指令系统的详细情况),然后以实现二进制乘法和除法运算功能为应用目标,在COP2000的集成开发环境下,设计全新的指令系统并编写对应的微程序;之后编写并运行实现乘法和除法的程序进行设计的验证。
三、课程设计所用设备及所需资料1. COP2000实验系统2. PC机( COP2000仿真软件)3. COP2000计算机组成原理实验仪说明书四、课程设计的具体内容(步骤)按以下8个步骤进行,要求各位同学将以下每个步骤的结果表述在课程设计报告里,步骤1. 掌握COP 2000模型机的微程序控制器原理。
步骤 2. 掌握有关计算机中实现乘法和除法的算法流程与相应的硬件实现原理。
步骤3. 将步骤2中算法与COP2000实验仪的硬件资源相对应。
步骤4. 依据步骤3的结果,在COP2000集成开发环境下设计新的指令/微指令系统。
步骤5. 用步骤4设计的新指令集编写实现乘法、除法(除法为选作)功能的汇编语言程序。
步骤6. 对步骤5的程序进行输入、调试、运行以验证新指令/微指令系统设计的正确性。
步骤7. 连接PC机与COP2000实验仪,用新指令集的微程序控制器控制实验仪工作,观察步骤6中乘法和除法程序运行的情况。
步骤8. 完成课程设计报告,设计结果验收。
五、时间安排实验室时间安排:8月27号(周三)1-4节;9月3号(周三)1-4节;9月4号(周四)3~4节验收.。
机械原理实验指导书-学生

构件的实际长度(mm) 简图中构件的长度(mm)
※本实验对于不便于测量的复杂机械装置,只需表达机械传动的原理,可不进行 构件长度的测量,只绘制表达机构传动原理的机构示意图。 2. 机构自由度计算 (1)计算机构自由度 F
五、思考题讨论
1. 齿条刀具的齿顶高和齿根为什么都等于 (ha* c* )m ? 2. 用齿轮刀具加工齿轮时,刀具和轮坯间的相对位置和相对运动有何要求?轮齿
的根切现象是怎样产生的?
6
机械原理实验报告
实验名称 班号
实验日期
月日
实验二 齿轮范成实验
组别
学生姓名
成绩
指导老师
一、原始数据
项目
m
h a*
c*
1
对于组成转动副的构件,不论其实际形状如何,都只用两转动副之间的连线代表。 例如 AB 代表构件 2,BC 代表构件 3。对于组成移动副的构件,不管其截面形状如何, 都用滑块表示。例如滑块 4 代表构件 4,并通过滑块上转功副 C 的中心画出中心线 x‐x 代表 4 与 1 相对移动的方向线。机架通过加阴影线表示,以使与活动构件区别。如构 件 1。原动件上用箭头表示运动方向,以便与从动件区别,如构件 2。如图 1‐1(b) 所示即为(a)图所示机构的运动简图。
d
单位
数值
二、计算数值
项目 齿数 z
单位 ——
计算公式 ——
计算结果
标准齿轮
变位齿轮
最小变位系数 xmin ——
实取变位系数 x
遥控飞机原理和构造

遥控飞机原理和构造遥控飞机原理和构造一、飞行原理伯努利原理如果两手各拿一张薄纸,使它们之间的距离大约4-6厘米,然后用嘴向这两张纸中间吹气,你会看到这两张纸不但没有分开,反而相互靠近了.而且用嘴吹出的气体速度越快,两张纸就越靠近了.从这个现象可以看出,当两纸中间有空气流过时,压强变小了,纸外压强比纸内大,内外的压强差就把两纸往中间压去,中间空气流动的速度越快,纸内外的压强差也就越大.机翼升力原理:如图一所示图一飞机机翼的剖面又叫翼型.一般翼型的前端圆钝,后端尖锐.上表面拱起,下表面较平,呈鱼侧形.前端点叫前沿,后端点叫后沿,两点之间的连线叫翼弦.当气流迎面流过机翼时,由于机翼的插入,被分成上下两股气流,气流通过机翼后,在后沿又重合成一股.由于机翼上表面拱起,使上方的那股气流通道变窄.根据气流的连续性原理和伯努利原理可知,机翼上方的压强比机翼下方的压强小.也就是说,机翼下表面受到向上的压力比机翼上表面受到向下的压力要大.这个压力差就是机翼产生的升力.如图一所示:图二遥控飞机原理和构造二、飞机的结构1 飞机的机身,如图三所示(机身材料为EPP聚丙稀)机翼: 主要产生升力水平尾翼: 控制飞机的俯仰安定性垂直尾翼: 控制飞机的轴向安定性机身:连接机翼、水平尾翼、垂直尾翼、动力组成等配件将它们组成一架完整的飞机.遥控飞机原理和构造2 电池本飞机使用聚合物锂离子电池,给飞机提供能量,该电池可反复充电.3 动力组成,结构如图四所示图四4 控制板控制板是飞机的心脏,通过接收发射机发出的无线电波信号来达到控制飞机的升降与转向.5 起落架辅助飞机起降,并起保护作用.三、遥控器:各功能如图五所示遥控器主要功能分两大类:① 控制飞机的各项功能,升降,转向等② 给飞机充电发射机内有一块充电保护板,由单片机控制.当飞机内电池电量充足时,自动识别,不会对飞机充电,只有当飞机电池电压较低时,才会对飞机充电.建议:遥控器内使用碱性电池或者充电电池遥控飞机原理和构造图五四、飞行前准备首先要选择一个空旷场地,空旷的场地气流会比较稳定将有助飞行,选择无风或微风天气飞行.1 飞行之前首先要学会手掷飞机.拇指和食指握着机身后半段,并保持飞机平衡,向正前方轻轻掷出.在没有动力的状况下,飞机能够平稳的滑翔一段距离为OK.2 辨风向:要迎风起飞,迎风降落.五、飞行状态调整仰角:机翼翼形前沿最高点与后沿最高点之间的连线与水平尾翼所形成的夹角为仰角.仰角在较小范围内与升力成正比.当飞机不容易起飞,爬升角度不够时,请将飞机尾部升降舵面往上调,加大飞机的抬头力距,增大升力;当飞机爬升角度过大时,容易造成飞机失速,且飞机不好控制,这时,请将飞机尾部升降舵往下调.。
Synergetic + P+L Systems 飞行 insect 控制产品说明书
L E A D I N G I N N O V A T I V E F L Y I N G I N S E C T C O N T R O L2R E F E R E N C E M A T E R I A L30z 35F L Y L IGH T S E L E C T O R 30z 31B U L B S E L EC T O R 32G L U E B O A RD SE L E C T O R 33N O T E S34O T H E R P +L S Y S T E M S B R A N D S35E L E C T R I C G R I DF L Y L IGH T S26z 29A L L U R E27z 28I N S E C T A F L A S H29CONTENTS3A B O U T S Y N E R G E T I C ® + P +L S Y S T E M S ®F r o m r e s e a r c h + d e v e l o p m e n t t o i n n o v a t i o n + t e s t i n gI N N O V A T I O N A T S Y N E R G E T I C ®4A B O U T B U L B S 6z 7 P O S I T I O N I N G A F L Y L I G H T5A B O U T G L U E B O A R D S 8D E C O R A T I V E F L Y L I G H T S17z 25A U R A18z 19N E C T A R23F L Y P O D24z 25L U R A L I T E P R O F E S S I O N A L 20L U R A L I T E C E N T O P L U S 21S A T A L I T E 22G L U E B O A R D F L Y L I G H T S9z 16E D G E10z 11F L Y T R A P P R O F E S S I O N A L14-‐15H A L O12z 13I Q S T A N D A R D16ABOUT SYNERGETIC® + P+L SYSTEMS®B r i n g i n g l e p r o d u c t s o B u i l d i n g o U S A,C a n T h e S y n e r b a c k r o o m f l y i n g i n s e F o r a d v i c e2847o r e A l t e r n a t i v e S y n e r g e t i c f a c i l i t i e s m n e e d s.P+3 A B O U Tb i r dc o n t rL e a d i n g bm a r k e t s ao f h i g h q uc u s t o m e r sL e a d i n g pw o r l d c l a sw i t h c u s t os o l u t i o n s bT o f i n d o uw w w.p a n d4INNOVATION AT SYNERGETIC®“W e h a v e a s t r o n g f o c u s o n i n n o v a t i o n a n d d e v e l o p m e n t , a l l o w i n g u s t o o f f e r o u r c u s t o m e r s w o r l d l e a d i n g , p a t e n t e d p r o d u c t s ”I N N O V A T I O N A N D P R O D U C T D E V E L O P M E N T Õ L e a d i n g p a t e n t e d t e c h n o l o g i e s d e v e l o p e d t h r o u g h a c o n s i s t e n t n e w p r o d u c t d e v e l o p m e n t p r o g r a mÕ O f f e r i n g r e d u c e d i n s t a l l a t i o n a n d s e r v i c e t i m e s a n d i m p r o v e d r e s u l t s ÕN e w p r o d u c t s a r e d e v e l o p e d w i t h w o r l d w i d e l e g i s l a t i v e a n d e f f i c a c y t e s t h o u s e sE F F I C A C Y T E S T I N G Õ T r i e d a n d t e s t e d p r o d u c t s o l u t i o n sÕ E f f i c a c y a s s e s s m e n t s c a r r i e d o u t b y i n d e p e n d e n t t e s t h o u s e s a n d a t o u r i n -‐h o u s e R +D f a c i l i t yÕ Tes ting and app ro va ls from lead ing ind ust ry an d gover nme nt bo di e s ÕM a t e r i a l a n d c o m p o n e n t t e s t i n gC O M P R E H E N S I V E R A N G E O F F E R Õ A c o m p r e h e n s i v e r a n g e , d e s i g n e d f o r p e s t m a n a g e m e n t p r o f e s s i o n a l sÕC o m p l e t e i n s e c t c o n t r o l r a n g e o f f e r s a c h o i c e o f e l e c t r i c g r i d , g l u e b o a r d a n d d e c o r a t i v e u n i t s i d e a l f o r c o m m e r c i a l , i n d u s t r i a l a n d f r o n t -‐o f -‐h o u s e a r e a sT E C H N I C A L S U P P O R T Õ S p e c i a l i s e d t e c h n i c a l t e a m s w i t h e x t e n s i v e i n d u s t r y e x p e r i e n c e Õ S u p p o r t a v a i l a b l e i n o v e r 12 l a n g u a g e sÕ A d v i c e a n d s u p p o r t o n p r o d u c t s e l e c t i o n a n d i n s t a l l a t i o n Õ G u i d a n c e o n p r o j e c t q u o t a t i o n s ÕT r a i n i n g s u p p o r t p a c k a g esFLYMAP + POSITIONING A FLYLIGHTF L Y M A P + P O S I T I O N I NG A F L Y L I GH TF L Y M A I N S E K i l l i n gG l u e b D e c o r P O S I T I Every application is unique, so each situation requires an individual assessment for flylight positioning, however, there are basic principals that should be followedÕ R e c o m Õ I n s t a l l d o o r s Õ C o n s i d Õ D o n ’t a r e a sÕ G l u e b p r e p a Õ C o n s i d Õ W h e r e n a t u r a Õ F l y l i g h i n t e r c e ÕF l y l i g h p r o t e c6BULBS –SYNERGETIC®W e u n d e r s t a n d t h a t o u r c u s t o m e r s w o r k w i t h i n a v a r i e t y o f e n v i r o n m e n t s a n d n e e d a c h o i c e o f b u l b s w h i c h w i l l o f f e r s o l u t i o n s t o t h e w i d e r a n g e o f i s s u e s f a c e d. W e h a v e d e v e l o p e d a c o m p r e h e n s i v e r a n g e i n c o r p o r a t i n g t h e l e a d i n g b r a n d s a n d t e c h n o l o g i e s t o e n s u r e t h a t i t ’s e a s y t o f i n d t h e r i g h t b u l b e v e r y t i m e.H O W O F T E N S H O U L D U V B U L B S B E C H A N G E D A N D W H Y ?W e r e c o m m e n d t h a t U V b u l b s a r e c h a n g e d e v e r y 12 m o n t h s t o e n s u r e m a x i m u m e f f i c a c y.T h e l e v e l s o f U V p r o d u c e d b y f l u o r e s c e n t b u l b s d e t e r i o r a t e s r a p i d l y t h r o u g h o u t t h e l i f e o f t h e b u l b. W h i l s t t h e b u l b w i l l c o n t i n u e t o g l o w b l u e o r g r e e n i n d e f i n i t e l y , a f t e r a p p r o x i m a t e l y 8,000 h o u r s t h e a m o u n t o f u s e f u l U V (W h i c h h u m a n s c a n n o t s e e ) d r o p s t o a l e v e l w h e r e i t i s n o l o n g e r a t t r a c t i v e t o f l y i n g i n s e c t s. A s a r e s u l t , U V b u l b s m u s t b e r e p l a c e d a n n u a l l y t o e n s u r e t h e y r e m a i n e f f e c t i v e i n p r o d u c i n g u s e f u l l e v e l s o f U V. T h i sr e p l a c e m e n t c y c l e i s t y p i c a l l y u n d e r t a k e n j u s t b e f o r e t h e p e a k i n s e c t s e a s o n , (M a r c h /A p r i l w i t h i n N o r t h A m e r i c a ) t o e n s u r e t h e f l y l i g h t i s p r o d u c i n g t h e m a x i m u m a m o u n t o f U V t h r o u g h o u t t h e c r i t i c a l i n s e c t s e a s o n.E a s i l y r e c o g n i z e d b y t h e i r g l o w i n g g r e e n l i g h t , S y n e r g e t i c ® b u l b s h a v e b e e n d e v e l o p e d t o a t t r a c t a m u c h w i d e r r a n g e o f f l y i n g i n s e c t s t h a n t r a d i t i o n a l b l u e U V b u l b s.B a s e d u p o n a u n i q u e p h o s p h o r m i x , p a t e n t e d t e c h n o l o g y e n s u r e s t h a t a b r o a d e r ‘t w o p e a k ’ w a v e l e n g t h i s m a i n t a i n e d (368n m a n d 540n m ) a t t r a c t i n g a w i d e r a n g e o f i n s e c t s i n c l u d i n g s t o r e d p r o d u c t m o t h s , w h i l s t a t t r a c t i n g t h e c o m m o n h o u s e f l y a s e f f e c t i v e l y a st r a d i t i o n a l b l u e U V b u l b s , g i v i n g y o u t h e b e s t o f b o t h U V t e c h n o l o g i e s.E x t e n s i v e t e s t i n g h a s b e e n c a r r i e d o u t o v e r m a n y y e a r s b y i n d e p e n d e n t e n t o m o l o g i s t s a n d t e s t l a b o r a t o r i e s , s h o w i n g t h e b e n e f i t s o f g r e e n l i g h t i n c o m b i n a t i o n w i t h U V.A w i d e d i v e r s i t y o f i n s e c t s w e r e s h o w n t o b e m o r e a t t r a c t e d t o S y n e r g e t i c ® l i g h t , i n c l u d i n g g r e e n h o u s e w h i t e f l i e s 1, s i l v e r l e a f w h i t e f l i e s , t h r i p s , l e a f h o p p e r s 2,I n d i a n m e a l m o t h s , M e d i t e r r a n e a n f l o u r m o t h s 3, t r o p i c a l w a r e h o u s e m o t h s , w a r e h o u s e m o t h s 4, p l u s m a n y m o r e !D I D Y O U K N O W ?M a n y i n s e c t p e s t s o f p u b l i c h e a l t h , s t o r e d p r o d u c t a n d a g r i c u l t u r a l i m p o r t a n c e h a v e e v o l v e d v i s u a l p i g m e n t s w h i c h a l l o w t h e m t o p e r c e i v e g r e e n l i g h t.5R e c o r d i n g s o f e l e c t r o r e t i n o g r a m s i n h o u s e f l y e y e s f o u n d p e a k s i n b o t h U V (340-‐365n m ) a n d b l u e g r e e n (450-‐550n m )6 w i t h s i m i l a r s e n s i t i v i t i e s f o u n d i n o t h e r D i p t e r a e g. C a l l i p h o r a v i c i n a M e i g 7, H a e m a t o b i a i r r i t a n s L., M u s c a a u t u m n a l i s D e G e e r , S t a m o x y s c a l c i t r a n s L.8, G l o s s i n a m o r t i s a n s m o r t i s a n s W e s t w.9, a n d F a n n i a c a n i c u l a r i s L.10, a s w e l l a s t h e m o s q u i t o A e d e s a e g y p t i (323-‐345n m a n d 523n m )11. S e v e r a l T a b a n i d s p e c i e s w e r e a l s o f o u n d t o h a v e a p e a k a c t i v i t y o f 400-‐600n m 12.U V I r r a d i a n c e (µw /c m ²)W a v e l e n g t h (n a m o m e t e r s )U V T U B E O U T P U T -‐ S Y N E R G E T I C 15W 18" 300 306 311 317 322 328 333 339 344 350 355 361 366 372 377 383 388 394 399 405 410 416 421 426 432 437 443 448 453 459 464 470 475 480 486 491 496 502 507 512 517 523 528 533 538 544 549 554 559 564 570 575 580 585 590 5951 Coombe, P.E. 1981. Wavelength specific behavior of the whitefly Trialeurodes vaporariorum (Homoptera: Aleyrodidae) J. Comp. Physiol. 144:83-‐902 Chu, C.C., Printer, P.J., Henneberry, T.J., Umeda, K., Natwick, E.T., Wei, Y., Reddy V.R & Shrepatis, M. 2000. Use of CC traps with different trap base colours for silverleaf whiteflies (Homoptera: Aleyrodidae ), thrips (Thysanoptera: Thripidae ) and leafhoppers (Homoptera: Cicadellidae ). J. Econ. Entomol. 93:1329-‐1337.3 Soderstrom, L., 1970. Effectiveness of green electroluminescent bulbs for attracting stored product insects. J. Econ. Entomol. 63: 726-‐731.4 Rees, D.P., 1985. Review of the response of stored product insects to light of various wavelengths, with particular reference to the design and use of light traps for population monitoring. Trp.Sci. 25: 197-‐21.5 Small, G., 2009. Review of the attraction of insects to green light. I2L Research6 Mazokhin-‐Porshniakov, G.A., 1960. Colourometric study of the properties of colour vision of insects as exemplified by the house fly . Biofizika 5 (3):295-‐3037 Burkhardt, D., 1962. Spectural sensitivity and other response characteristics of single visual cells in the arthropod eye. Symp. Soc. Exp. Biol. 16:86-‐109.8 Agee, H.R. & Patterson, R.S., 1983. Spectral sensitivity of stable, face and horn flies and behavioural responses of stable flies to visual traps (Diptera: Muscidae). Environ. Entomol. 12 (6): 1823-‐1828.9 Green, C.H. & Cosens, D. 1983. Spectral responses of the tsetse fly , Glossina morsitans morsitans . J. Insect Physiol. 29 (10): 795-‐800 10 Bellingham, J., & Anderson, M., 1993. Variations and sexual differences in the spectral sensitivity of the compound eye of the housefly Musca domestica (L.) and the lesser housefly Fannia canicularis (L.). Proceedings of the International Conference on Insect Pests in the Urban Environment 1:480. Cambridge. 11 Muir, L.E., Throne, M.L. & Kay, B.H. 1992. Aedea aegypti (Dipthera: Culicidae ) vision: Response to stimuli from the optical environment. J. Med. Entomol. 29(3):445-‐50. 12 Smith, W.C., 1986. The retina of the Tananidae (Dipthera ) compound eye: an ultrastructural and electrophysical study. M.S. thesis, University of Florida, Gainesville, USA. 406 pp.7BULBS – SYLVANIA, PLUSLAMP™ + SHATTERPROOFINGB U L B S O O F I N GA r e s p e c t b r a n d o fO f f e r i n g s 368n m b l T e s t i n g s h d e t e r i o r a t S H A S h a t t e r p r s h a r d s i f t h a t y o u e a r e a s , i n c T b e i n s t a l l e T h e F l u o r s p e c i f i c a l s t h r o u g h t h i r r a d i a n c e 3% o f t h e o f t h e s l e d i s c o l o r i n b r e a k a g e.0.002.004.006.008.0010.0012.0014.00 U V I r r a d i a n c e (µw /c m ²)300 306 311 317 322 3288GLUEBOARDS G L U E B O A R D SG l u p a c®g l u e b o a r d s a r e d e s i g n e d t o p e r f e c t l y c o m p l e m e n t y o u r S y n e r g e t i c®f l y l i g h t,o f f e r i n g c o n s i s t e n t l y h i g hs t a n d a r d s o f p e r f o r m a n c e a n d q u i c k s e r v i c i n g t i m e s.E A S YF L Y C O U N TG R I D SG l u p a c®g l u e b o a r d s f e a t u r e s i m p l e g r i d s t o m a k e i t q u i c k a n d s i m p l e t o m o n i t o r a n d r e c o r d f l y c o u n t s a n di d e n t i f y s p e c i e s.T h i s a l l o w s v a l u a b l e,a c c u r a t e f e e d b a c k t o b e k e p t f o r h y g i e n e a u d i t s a n d s h a r e d w i t h t h ee n d u s e r o n a r e g u l a r b a s i s.S I L I C O N C O A T E D R E L E A S E P A P E RG l u p a c®r e l e a s e p a p e r i s s i l i c o n c o a t e d t o e n s u r e t h a t i t r e l e a s e s f r o m t h e g l u e c o v e r e d b o a r d q u i c k l y a n ds i m p l y,l e a v i n g t h e g l u e i n p l a c e.T h i s g u a r a n t e e s s p e e d y s e r v i c e t i m e s a n d e n s u r e s t h a t t h e r e i s n o c o n t a c tb e t w e e n t h e g l u e a n d t h e s e r v ic e t e c h n i c i a n.F E A T U R E SU n i q u e f l e x i b l e g l u e a p p l i c a t i o n a l l o w s f o r m a x i m u m g l u e a r e aA d v a n c e d U V s t a b l e g l u e g u a r d s a g a i n s t t h e g l u e d r y i n g o u t o v e r a f o u r w e e k p e r i o dD r y g l u e f o r m u l a t i o n r e d u c e s g l u e r u n f r o m e x p o s u r e t o b u l b h e a t a n d m e s s f r e e s e r v i c i n gC o n s i s t e n t t h i c k n e s s o f g l u e a p p l i c a t i o n e n s u r e s n o a r e a s a r e t o o t h i n t o r e t a i n t h e c a u g h t i n s e c tV a r n i s h e d b a s e m a t e r i a l r e d u c e s a b s o r p t i o n o f t h e g l u eH i g h q u a l i t y s i l i c o n c o a t e d r e l e a s e p a p e r p r o v i d e s e a s y p e e l a c t i o n l e s s m e s s a n d f o r r e d u c e d s e r v i c e t i m e sGLUEBOARD FLYLIGHTS G L U E B O910D e v e l o p e d t o b e t h e m o s t e f f e c t i v e g l u e b o a r d f l y l i g h t o n t h e m a r k e t,E d g e®i sd e s i g n e d a r o u n d p a t e n t e d*g l u e b o a r d t e c h n o l o g y t o c a t c h s i g n i f i c a n t l y m o r ef l y i ng i n s e c t s th a n t r a di t i o n a l g l u e b o a r d s.A s t h e g l u e b o a r d i s i n s e r t e d i n t o t h e f l y l i g h t i t s e l f-‐f o l d s a t t h e d e s i r e d p o i n t s,c r e a t i n g a u n i q u e f o r m a r o u nd h i g hef f i c a c y S y n e rg e t i c®U V b u l b s.Thi s u n i q u ed e s i g n f o r m s e d g e s,p r o v e n t o b e m o r e a t t r a c t i v e t o f l i e s,m a x i m i z e s u s e f u l U Vl i g h t o u t p u t,a n d c r e a t e s a30%l a r g e r g l u e a r e a t h a n t r a d i t i o n a l g l u e b o a r d s,c r e a t i n g a s t a g g e r i n g31.5%i n c r e a s e o n a n o r m a l c a t c h r a t e!T h e u n i q u e g l u e b o a r d f o r m p r o v i d e s t h r e e f e a t u r e s s h o w n t o b e t t e r c a t c h f l y i n gi n s e c t s:1.T h e g l u e b o a r d f o r m s e d g e s,p r o v e n t o b e m o r e a t t r a c t i v e t o f l i e s2.30%l a r g e r g l u e a r e a t h a n t r a d i t i o n a l‘f l a t’g l u e b o a r d s3.T h e g l u e a r e a i s e q u i d i s t a n t f r o m t h e U V b u l b s,m a x i m i z i n g t h e u s e f u l g l u ea r e a*P a t e n t p e n d i n gB U L B S2 x T G X 15–G L U E B O A R D S1 x I N F 198W E I G H T (l b s )12306090120C A U T M E (M N U T E S )200EROOM COVERAGE1300 ft²APPLICATIONCommercial Kitchen + Industrial Food Preparation + Front of House12P R O D U C T C O D EZ F 100/110vD E S C R I P T I O NHalo 30D I ME N S I O N S (I N C H E S ) H x W x D13½ x 24 x 3¼C O V E R A G E (f t ²)860B U L B S2 X T P 15–18G L U E B O A R D S1 x I N F 199W E I G H T (l b s )13¼W i t h a c o n t e m p o r a r y , d i s c r e e t a e s t h e t i c a n d s u p e r i o r e f f i c a c y , H a l o i s t h e m o s t v e r s a t i l e g l u e b o a r d f l y l i g h t a v a i l a b l e f o r u s e a c r o s s a r a n g e o f c o m m e r c i a l a p p l i c a t i o n s. H a l o i s a v a i l a b l e a s a s l i m l i n e 30 o r 45 w a t t m o d e l w h i c h c a n b e w a l l , c o u n t e r t o p o r h o r i z o n t a l c e i l i n g m o u n t e d. H a l o p r o d u c t s f e a t u r e a l i g h t r e f l e c t i n g s w i n g d o w n f r o n t g u a r d , s i m p l e g l u e b o a r d r e p l a c e m e n t a n d c o m m o n h i g h e f f i c a c y 15W U V b u l b s f o r r e d u c e d i n v e n t o r y r e q u i r e m e n t s.F o r i n c r e a s e d e f f i c a c y H a l o i n c o r p o r a t e s U V r e f l e c t i n g a l u m i n u m c o m p o n e n t s s u c h a s t h e r e m o v a b l e d e b r i s t r a y. T h e p a t e n t e d * v a r i a b l e s i d e l i g h t o u t p u t g a t e s a l l o w 180° l i g h t o u t p u t f o r i n c r e a s e d e f f i c a c y.* P a t e n t p e n d i n g13C O N T E M G L U E B O1428/110vI P T I O NFTP30, 30 watt, WhiteS I O N S(I N C H E S)H x W x Dx18½x12A G E(f t²)T P15–18O A R D SI N F196T(l b s)ROOM COVERAGE860 ft²APPLICATIONIndustrial FoodPreparation15P R O F E S S I O N A L G L U E B O A R D I N S E C T C O N T R O LROOM COVERAGE2600 ft²APPLICATIONIndustrial Food PreparationAreasF E A T U R E SC h o i c e o f s e v e n m o u n t i n g o p t i o n s f o r m a x i m u m v e r s a t i l i t y S i m p l e g l u e b o a r d a n d b u l b r e p l a c e m e n tP r o v i d e s 360º l i g h t o u t p u t a n d e a s e o f a c c e s s f o r f l y i n g i n s e c t s O p e n d e s i g n t o i n c r e a s e a t t r a c t a n t a r e aD e s i g n e d f o r u s e w i t h G L U P A C ® p h e r o m o n e i m p r e g n a t e d g l u e b o a r d s w i t h U V s t a b i l i z e rH i g h e f f i c a c y U V b u l b s A l l m e t a l c o n s t r u c t i o nP R O D U C T C O D EZ F 030/110vD E S C R I P T I O NFTP80, 80 watt, WhiteD I ME N S I O N S (I N C H E S ) H x W x D6¼ x 25¼ x 12C O V E R A G E (f t ²)2600B U L B S2 x T P 40–24G L U E B O A R D S1 x I N F 098W E I G H T (l b s )12.116IQ StandardS(I N C H E S)H x W x D11x3½(f t²)5-‐18D S086s)ROOM COVERAGE1300 ft²APPLICATIONCommercial Front ofHouse, CommercialDECORATIVE FLYLIGHTS1718AURAS t y l i s h a n d c o n t e m p o r a r y,t h e A u r a™d e c o r a t i v e f l y l i g h t i s a n u l t r a d i s c r e e t u n i td e s i g n e d f o r f r o n t-‐o f-‐h o u s e a p p l i c a t i o n s.I d e a l f o r u s e w i t h i n c a f e s,r e s t a u r a n t s,b a r s a n d h o t e l s,t h e A u r a™o f f e r s a ne l e g a n t,m o d e r n a e s t h e t i c a l o n g s i d e i n n o v a t i v e,e a s y-‐t o-‐s e r v i c ef e a t u r e s a n dm a x i m u m e f f i c a c y.T h e u n i q u e c i r c u l a r r e g i s t e r e d d e s i g n o f t h e u n i t a l l o w sl i g h t t o a t t r a c t f l y i n g i n s e c t s f r o m a f u l l360°a r o u n d t h e u n i t,a t t r a c t e d b y t h ep a t e n t e d S y n e r g e t i c®g r e e n l i g h t,w h i l s t t h e d e s i g n o f t h e d i s c r e e t l y p o s i t i o n e dg l u e b o a r d g i v e s a100%u s e f u l g l u e a r e a w h i c h r e m a i n s h i d d e n f r o m c u s t o m e rv i e w.19AURAC O N TTS e l f20538B U L B S2x T P15–18G L U E B O A R D S1x I N L121W E I G H T(l b s)10ROOM COVERAGE538 ft²APPLICATIONFront21B U L B S1 x T P 18G L U E B O A R D S1 x I N L 128W E I G H T (l b s )5½ROOM COVERAGE270 ft²22ROOM COVERAGE655 ft²APPLICATIONFront23NECTARN E C T A ROOM COVERAGEFull CounterAPPLICATIONFull In-‐counter + Food DisplayAreaP R O D Z L 0D E S C Nectar, 15 watt, StainlessD I ME N 4¾C O V E R A G E (f t ²)F u l l C o u n t e r C o T U B E S1 x T G X 15–18SG L U E B O A R D S2 x I N L 170W E I G H T (l b s )4¼24F l y p o d®i n c o r p o r a t e s s e v e r a l u n i q u e f e a t u r e s t o p r o v i d e c o m m e r c i a le f f e c t i v e n e s s a n d d o m e s t i c s e r v i c e a b i l i t y.D e s i g n e d s p e c i f i c a l l y t o b e q u i c ka n d e a s y t o s e r v i c e,F l y p o d®i n c o r p o r a t e s a p a t e n t e d r e a r g l u eb o a r d r e m o v a ls y s t e m,e n s u r i n g t h e u s e r d o e s n’t c o m e i n t o c o n t a c t w i t h d e a d f l i e s o r t h es t i c k y g l u e b o a r d.S T Y L I S H A N D E F F E C T I V E T A B L E T O P F L Y L I G H TROOM COVERAGE323 ft²APPLICATIONDomestic +26ELECTRIC GRID FLYLIGHTS27z 28A L L U R E29IN S E C T A F L A S HWHAT IS AN ELEC TR I C G R I D FL YL I GH T ?E l e c t r i c g r i d f l y l i g h t s u s e U V l i g h t t o a t t r a c t f l y i n g i n s e c t s t o t h e u n i t , t h e n u s e a e l e c t r i c g r i d t o k i l l t h e i n s e c t s , b e f o r e r e t a i n i n g t h e m i n a c a t c h t r a y t o a l l o w h y g i e n i c d i s p o s a l.E l e c t r i c g r i d f l y l i g h t s a r e i d e a l f o r u s e i n c o m m e r c i a l b a c k r o o m , c o m m e r c i a l f r o n t o f h o u s e a n d i n d u s t r i a l b a c k r o o m a r e a s.S Y N E R G E T I C ® E L E C T R I C G R I D F L Y L I G H T SALLURE®27 A L L U R E®l e a d i n g t r a d i t i o n a l30w a t t u n i t.M I N U T E S*P a t e n t p e n d i n gALLURE®28G E(f t²)G X15–18l b s)ROOM COVERAGE1300 ft²APPLICATIONCommercial29I N S E C T A ROOM COVERAGE3300 ft²19¾COMMERCIALF L Y L IGH T P R O D U C T S E L E C T O R–C O M M E R CI A LU s e o u r s i m p l e g u i d e t o h e l p y o u s e l e c t t h e p e r f e c t f l y l i g h t f o r y o u r t y p e a n d s i z e o f a p p l i c a t i o n.30FLYLIGHT PRODUCT SELECTOR –31FLYLIGHT PRODUCT SELECTOR – INDUSTRIALF L Y L IG COVERAGE (ft²)GLUEBOARD FLYLIGHTSEdge Halo Flytrap Professional IQ StandardKILLING GRID FLYLIGHTSAllure InsectaflashDECORATIVE FLYLIGHTSAura SataliteLuralite Cento Plus Luralite ProfessionalFlypod NectarBULB PRODUCT SELECTOR B U L B P R O D U C T S E L E C T O R U s e t h i s q u i c k a n d e a s y r e f e r e n c e g u i d e t o f i n d t h e r i g h t b u l b s f o r y o u r f l y l i g h t.32T o f i n d o u t m o r e a b o u t e a c h o f o u r b u l b b r a n d s,p l e a s e t u r n t o p a g e s6a n d7o r a l t e r n a t i v e l y c a l l o u r t e a m o n(877)928-2847w h o w o u l d b e h a p p y t o a d v i s ey o u o n b u l b s e l e c t i o n.A l l b u l b s a r e a l s o a v a i l a b l e i n s h a t t e r p r o o f v e r s i o n s–p l e a s e s p e c i f y i f s h a t t e r p r o o f i s r e q u i r e d w h e n o r d e r i n g b yi n s e r t i n g t h e l e t t e r‘S’a f t e r t h e p r o d u c t c o d eGLUEBOARD PRODUCT SELECTOR G L U E B FLYLIGHT MODEL NO.Z F028/Z F033/Z F050/Z F100/Z F101/Z F105/Z L009/Z L015/Z L022/33Z L051/Z L055/Z W00534NOTESN O T E SOTHER P+L SYSTEMS BRANDS O T H E R35F o r a d v i c e o n p r o d u c t s e l e c t i o n o r t e c h n i c a l s u p p o r t,c a l l o u r t e a m o n(877)928-2847o r e m a i l i n f o@p a n d l s y s t e m s.c o mT+1(877)928-‐2847F+1(800)973-‐5562W w w w.s y n e r g e t i c-‐f l y l i g h t s.c o mF o r m o r e i n f o r m a t i o n o n t h e P+L S y s t e m sG r o u p p l e a s e v i s i t w w w.p a n d l s y s t e m s.c o m D I S T R I B U T E D B Y:。
COP-FLY-I组成原理实验指导书
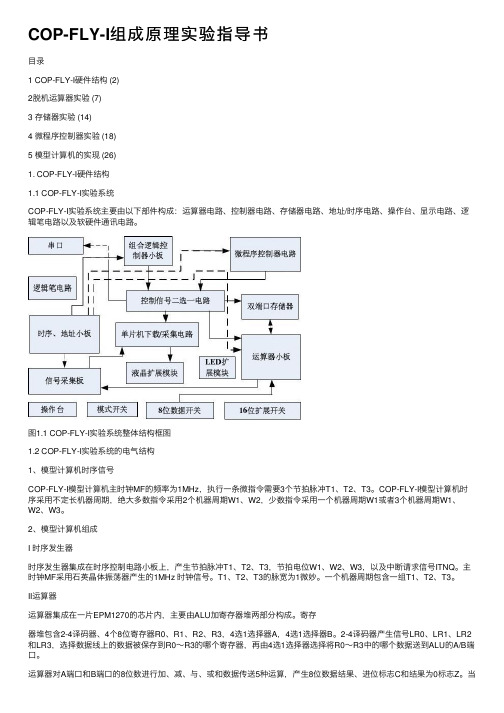
COP-FLY-I组成原理实验指导书⽬录1 COP-FLY-I硬件结构 (2)2脱机运算器实验 (7)3 存储器实验 (14)4 微程序控制器实验 (18)5 模型计算机的实现 (26)1. COP-FLY-I硬件结构1.1 COP-FLY-I实验系统COP-FLY-I实验系统主要由以下部件构成:运算器电路、控制器电路、存储器电路、地址/时序电路、操作台、显⽰电路、逻辑笔电路以及软硬件通讯电路。
图1.1 COP-FLY-I实验系统整体结构框图1.2 COP-FLY-I实验系统的电⽓结构1、模型计算机时序信号COP-FLY-I模型计算机主时钟MF的频率为1MHz,执⾏⼀条微指令需要3个节拍脉冲T1、T2、T3。
COP-FLY-I模型计算机时序采⽤不定长机器周期,绝⼤多数指令采⽤2个机器周期W1、W2,少数指令采⽤⼀个机器周期W1或者3个机器周期W1、W2、W3。
2、模型计算机组成I 时序发⽣器时序发⽣器集成在时序控制电路⼩板上,产⽣节拍脉冲T1、T2、T3,节拍电位W1、W2、W3,以及中断请求信号ITNQ。
主时钟MF采⽤⽯英晶体振荡器产⽣的1MHz 时钟信号。
T1、T2、T3的脉宽为1微妙。
⼀个机器周期包含⼀组T1、T2、T3。
II运算器运算器集成在⼀⽚EPM1270的芯⽚内,主要由ALU加寄存器堆两部分构成。
寄存器堆包含2-4译码器、4个8位寄存器R0、R1、R2、R3,4选1选择器A,4选1选择器B。
2-4译码器产⽣信号LR0、LR1、LR2和LR3,选择数据线上的数据被保存到R0~R3的哪个寄存器,再由4选1选择器选择将R0~R3中的哪个数据送到ALU的A/B端⼝。
运算器对A端⼝和B端⼝的8位数进⾏加、减、与、或和数据传送5种运算,产⽣8位数据结果、进位标志C和结果为0标志Z。
当信号ALUBUS为1时,将运算的数据结果送数据总线DBUS。
III数据/地址开关AD9~AD010位数据/地址开关AD9~AD0是双位开关,拨到上边表⽰“1”,拨到下边表⽰“0”。
3B SCIENTIFIC 自由落下实验设备说明书

3B SCIENTIFIC ® PHYSICS1Istruzioni per l'uso09/15 TLE/ALF1 Piastra di base2 Jack arresto3 Jack massa4 Jack avvio5Supporto asta con vite di fissaggio6 Piastra di raccolta7 Montante dello stativo con scala 8 Sfera di acciaio9 Mensola di partenza condispositivo di sgancio 10 Linguetta di fermo conmicromagnete 11 Staffa di sgancio12 Leva di arresto per mensola dipartenzaSistema per la misurazione del tempo di caduta di una sfera d'acciaio per altezze di caduta diverse e regolabili con precisione da 20 a 960 mm.Il montante dello stativo con scala graduata è fissato ad una piastra di base con piastra di raccolta integrata. Su questo montante è presente la mensola di partenza regolabile in altezza con dispositivo di sgancio per il corpo di caduta (sfera d'acciaio). Sotto il dispositivo di sgancio sono situati 3 spinotti di contatto che garantiscono una precisa posizione di partenza della sfera d'acciaio. La superficie conduttiva della sfera insieme a questi spinotti di contatto costituiscono un interruttore che si apre dopo l'inizio della caduta della sfera. Sulla punta della linguetta di fermo è presente un micromagneteche mantiene la sfera nella posizione di partenza. Il contatto della sfera con la piastra di raccolta arresta il cronometro. La piastra di raccolta è realizzata in modo che la sfera, dopo la caduta, si fermi su di essa e non cada sul pavimento.Questa struttura permette di riprodurre i risultati della misurazione in modoestremamente preciso.1 piastra di base1 montante dello stativo 1 mensola di partenza3 sfere d'acciaio, 16 mm Ø 1chiave a brugola3B Scientific GmbH ▪ Ludwig -Erhard-Str. 20 ▪ 20459 Amburgo ▪ Germania ▪ Con riserva di modifiche tecniche © Copyright 2022 3B Scientific GmbHAltezze di caduta regolabili da 20 a 960 mm Contatti di commutazione: Avvio: meccanico Arresto: elettronico Dimensioni: 200x130x730 mm 3∙Inserire il montante dello stativo nel supporto dell’asta della piastra di base fino alla battuta e posizionarlo in modo che la scala graduata sia rivolta verso la piastra di raccolta.∙Infine stringere saldamente la vite di fissaggio con la chiave a brugola in dotazione.In caso di corrett o montaggio, l’altezza esatta della scala è garantita e l’apparecchio pronto per il funzionamento.Fig. 1 Montaggio del montante dello stativoPer l'esecuzione degli esperimenti sono inoltre necessari i seguenti apparecchi: 1 contatore digitale@230 V 1001033 o1 contatore digitale@115 V 1001032 1 set di cavi per esperimenti 1002848∙Collegare l'apparecchio di caduta alcontatore. Rispettare il codice colore dei jack.∙Sganciare la leva di arresto e impostare l'altezza di caduta desiderata.L'altezza di caduta può essere letta sulla scala graduata del montante facendo riferimento al bordo del foro superiore della mensola di partenza (ved. fig. 2). Il valore della scala corrisponde al percorso di caduta, quindi alla distanza tra la sfera e la piastra di raccolta.∙Inserire la sfera d'acciaio dal basso sulla linguetta di fermo tra i tre punti di appoggio. Spingere la linguetta verso il basso.∙Dare inizio alla caduta esercitando una leggera pressione sulla staffa di sgancio.Per ottenere valori di misura molto precisi e riproducibili occorre effettuare uno sgancio immediato e preciso.La superficie della sfera si stacca dal micromagnete e apre il contatto di avvio con l'inizio del movimento di caduta.L'urto della sfera sulla piastra di raccolta apre brevemente il contatto di arresto e interrompe la misurazione del tempo.Fig. 2 Impostazione dell’altezza di caduta。
1 机械原理实验一-四旋翼飞行器实验指导书

实验一四旋翼飞行器实验指导书一、实验目的1.通过对四旋翼无人机结构的分析,了解四旋翼无人机的基本结构、工作的原理和传动控制系统;2. 练习采用手机控制终端来控制无人机飞行,并了解无人机飞行大赛的相关内容,及程序开发变为智能飞行无人机。
二、实验设备和工具1. Parrot公司AR.Drone2.0四旋翼飞行器一架;2. 苹果手机一部;3. 蓝牙数据传输设备一套。
4. 自备铅笔、橡皮、草稿纸。
三、实验内容1、了解四旋翼无人机的基本结构;2、了解四旋翼无人机的传动控制路线;3、掌握四旋翼无人机的飞行控制的基本操作;4、了解四旋翼无人机翻转动作的机理;5、能根据指令控制无人机完成特定操作。
四、实验说明1、四旋翼飞行器的介绍任何由人类制造、能飞离地面、在空间飞行并由人来控制的飞行物,称为飞行器。
在大气层内飞行的飞行器称为航空器,如气球、滑翔机、飞艇、飞机、直升机等。
它们靠空气的静浮力或空气相对运动产生的空气动力升空飞行。
飞行器不仅广泛应用于军事,在民用领域的作用也在增加,机载GPS和MEMS(Micro- Electro-Mechanical Systems)惯性传感器的飞行器甚至可以在没有人为控制的室外环境中飞行。
对飞行器的研究目前主要包括固定翼、旋翼及扑翼式三种,四旋翼飞行器在布局形式上属于旋翼的一种,相对于别的旋翼式飞行器来说四旋翼飞行器结构紧凑,能产生更大的升力,而且不需要专门的反扭矩桨保持飞行器扭矩平衡。
四旋翼飞行器能够垂直起降,不需要滑跑就可以起飞和着陆,从而不需要专门的机场和跑道,降低了使用成本,可以分散配置,便于伪装,对敌进行突袭和侦察。
四旋翼飞行器能够自由悬停和垂直起降,结构简单,易于控制,这些优势决定了其具有广泛的应用领域,不但具有一般战场需要的各种作战功能,比如侦察监视,为其他作战武器指示目标等,甚至可以作为投放武器的载体。
目前现有的无人机模型制造厂有很多,如表1-1,业内最为领先的即是法国派诺特Parrot公司。
(精华)THPFXC-1A小车运动控制系统实训模型

董海兵 2011年4月
一、小车运动系统本地控制实验
(一)系统概述 (二)实训项目
二、小车运动系统上位机组态监控 三、任务布置
(一)系统概述
1、概述
小车运动控制系统实训模型由运动小车、同步带轮传动 机构、直流电机、光电传感器、电感式传感器、电容式传感 器、超声波传感器、行程开关等组成,通过传感检测、PLC 编程,实现运动距离测量、传动控制、键值优化比较行走控 制、定向控制、定位控制、报警运行控制、点动控制、位置 显示控制等,能实现小车的精确定位。该系统外观精美,体 积紧凑,重量轻,行程范围:0.6米。实验系统能满足大中专 院校可编程控制器技术的教学、课程设计和毕业设计。
1769-L32E,compactlogix控制器模块。 CompactLogix平台包含有基于Logix平台的优点----通用 的编程环境,通用的网络,通用的控制引擎,结构紧凑而 性能卓越。与Compact输入输出(Compact I/O)组合在一起的 CompactLogix平台是装备小型、设备级控制应用的完美解 决方案,有着极高的性能和可扩展性。 1769-L32E支持的编程语言有:继电器梯形图、功能块 图、结构化文本、顺序功能块。 1769-L32E自带1个RS-232通讯口和1个Ethernet/IP以太 网通讯口。 1769-L32E控制器支持型号为1784-CF64、内存大小为 64M的CompactFlash卡,支持型号为1784-CF128、内存大小 为128M的CompactFlash卡。 1769-L32E的模块扩展能力:最多可扩展16个1769系列 的模块。
(2) 系统配置
4、系统软件
(1)RSLinx通讯组态软件
制作机翼模型实验报告
一、实验目的1. 了解机翼的基本结构和工作原理。
2. 掌握制作机翼模型的方法和技巧。
3. 通过实验,加深对空气动力学原理的理解。
4. 培养动手能力和团队协作精神。
二、实验原理机翼是飞机产生升力的关键部件,其设计直接影响飞机的性能。
根据伯努利原理,流体流速越大,压强越小。
当飞机模型飞行时,由于空气通过上表面的距离大于下表面的距离,上表面的流速就大,气压就变小,形成一个向上的压强差,使机翼获得一个向升起的动力。
三、实验材料1. 塑料板或纸板:用于制作机翼主体。
2. 弹簧或橡皮筋:用于模拟机翼弹性。
3. 轻质木棒或塑料棒:用于制作机翼骨架。
4. 胶水或胶带:用于固定和连接部件。
5. 尺子、剪刀、直尺、铅笔等工具。
四、实验步骤1. 设计机翼形状:根据实验要求,设计机翼的形状、尺寸和角度。
可以使用计算机辅助设计软件进行初步设计。
2. 制作机翼骨架:使用轻质木棒或塑料棒制作机翼骨架,确保骨架牢固且具有一定的弹性。
3. 制作机翼表面:使用塑料板或纸板制作机翼表面,注意上表面略微向上突起,前4分之1长较陡,后4分之3长较缓。
下表面一般是平的,或者略向内凹一些。
4. 组装机翼:将骨架和表面组装在一起,使用胶水或胶带固定。
5. 连接弹簧或橡皮筋:将弹簧或橡皮筋连接到机翼的一端,模拟机翼的弹性。
6. 测试和调整:将制作好的机翼模型放置在实验台上,进行飞行测试。
根据测试结果,调整机翼形状和角度,直至达到最佳性能。
五、实验结果与分析1. 实验结果:通过实验,成功制作了一台简易的机翼模型,并进行了飞行测试。
2. 结果分析:- 机翼形状和角度对飞行性能有显著影响。
适当调整机翼形状和角度,可以提高飞行稳定性和升力。
- 弹簧或橡皮筋的弹性对飞行性能也有一定影响。
适当调整弹性,可以使机翼在飞行过程中保持良好的姿态。
- 制作机翼模型的过程中,要注意材料的选用和加工精度,以确保模型的性能。
六、实验结论1. 通过本次实验,掌握了制作机翼模型的方法和技巧,加深了对空气动力学原理的理解。
遥控电动滑翔机
摘要摘要随着航空模型、电子技术和电池技术的快速发展,目前市场上已经出现通过遥控器来控制电动滑翔机运行的产品。
但是这些产品的遥控器在安全、距离、电磁污染等方面还存在很多不足。
它们控制电机的控制器在控制电机启动电流、电机噪音以及控制电路本身的功耗等方面也存在很多缺陷。
本文通过对遥控器的智能化研究,对控制器的安全性、稳定性、灵活性的研究,提出一系列新的方法方案解决了上述问题,并在此基础上做了很多完善,使电动滑翔机的灵活性、安全性、稳定性更高,控制器和电池的寿命更长久。
在分析遥控器的工作原理、功能需求的基础上,本遥控器采用 ATMEL 公司的 AT89C2051单片机作为控制核心,利用RC电路和比较器实现控制信号的A/D转换。
开发出短距离无线通信协议,既实现通过异步串口的短距离无线通信,又实现自动对码功能。
给出了解决同频干扰的方案,使多台滑翔机之间不会相互干扰。
电动滑滑翔机的性能主要体现在控制器上面。
本文对控制器的研究从它的安全性、稳定性、灵活性方面着手。
本文根据上述一系列功能,给出了详细的设计思路、制作方法以及它们的软件实现,并说明了在其中遇到的难点、疑点,和需要注意的地方。
最终测试表明,遥控器和控制器的各项功能都能够很好的完成,并能够长时间稳定工作。
关键词:电动滑翔机电路设计程序设计遥控器控制器I摘要AbstractAs the aviation model, the rapid development of electronic technology and battery technology, has appeared on the market at present through remote control to control the motor glider running products. But the remote control of the products in a safe, distance, there are a lot of electromagnetic pollution and so on. They control motor controller in the control of the motor starting current, noise and control circuit power consumption etc. There are many defects in itself. In this paper, through research on the intelligent remote control, the controller of the security, stability and flexibility of the research, put forward a series of new methods to solve the above problems, and on this basis made a lot of perfect, make the motor glider flexibility, security, stability, and the controller and the battery life longer.Based on the analysis of working principle, the functional requirements of the remote control, on the basis of the remote controller adopts AT89C2051 single chip microcomputer as control core of ATMEL company, using the RC circuit and the comparator control signal of the A/D conversion. Developed a short-range wireless communication protocol, realize through asynchronous serial port of short distance wireless communication, and implementation of automatic code function. Gives the solution to the same frequency interference, between the many sets of the glider will not interfere with each other. The performance of the electric sliding glider is mainly manifested in the controller. In this paper, the research on the controller from the aspects of its safety, stability and flexibility. According to the above a series of function, this paper gives the detailed design idea, production methods and their implementation, and in which illustrates the difficulties encountered, doubt, and need to pay attention to. The ultimate test show that each function of remote control and controller can very good finish, and can work stably for a long time.Keywords: motor glider remote controller circuit design programmingII目录目录第1章概述 (1)1.1 课题研究的背景和意义 (1)1.2 国内外航模的发展状况 (2)1.3 论文主要内容 (3)第2章电动滑翔机的软硬件规划 (5)2.1电动滑翔机的工作原理 (5)2.2遥控器的硬件的总体设计和模块划分 (7)2.3遥控器的软件总体设计和任务划分 (9)2.4控制器的硬件总体设计和模块划分 (11)2.5控制器软件总体设计及任务划分 (12)2.6本章小结 (14)第3章遥控器硬件和软件系统的实现 (15)3.1基于单片机AT89C2051的遥控器硬件设计 (15)3.2 遥控器软件实现 (21)第4章控制器硬件和软件的实现 (29)4.1 基于单片机PIC16F73的控制系统硬件的建立 (29)4.2 控制系统软件实现 (36)4.3 本章总结 (39)第5章电动滑翔机电路板的设计与制作 (41)I目录5.1 原理图的绘制 (41)5.2 PCB板的生成与制作 (41)5.3 本章小结 (46)结论 (47)致谢 (49)参考文献 (50)II第1章概述第1章概述1.1 课题研究的背景和意义人类自古以来就幻想着飞行。
固定翼飞行原理硬件介绍以及制作指导

固定翼篇目录:一.飞行原理二.硬件介绍三.制作指导一.飞行原理1.飞机飞行时受到的作用力飞机在飞行时会受到4个基本的作用力:升力(lift)、重力(weight)、推力(thrust)与阻力(drag)。
1.1升力机翼的运动在穿越空气时,会产生一股向上作用的力量,这就是升力。
机翼的前进运动,会让上下翼面所承受的压力产生轻微的差异,这个上下差异,就是升力的来源。
由于升力的存在,飞机才能够维持在空中飞行。
产生升力的主要原因:(有翼型固定翼)伯努利定律是空气动力最重要的公式,简单的说流体的速度越大,静压力越小,速度越小,静压力越大,这里说的流体一般是指空气或水,在这里当然是指空气,设法使机翼上部空气流速较快,静压力则较小,机翼下部空气流速较慢,静压力较大,两边互相较力,于是机翼就被往上推去,然后飞机就飞起来,以前的理论认为两个相邻的空气质点同时由机翼的前端往后走,一个流经机翼的上缘,另一个流经机翼的下缘,两个质点应在机翼的后端相会合,经过仔细的计算后发觉如依上述理论,上缘的流速不够大,机翼应该无法产生那么大的升力,现在经风洞实验已证实,两个相邻空气的质点流经机翼上缘的质点会比流经机翼的下缘质点先到达后缘。
(平板固定翼)攻角(迎角): 当飞机的机翼为对称形状,气流沿着机翼对称轴流动时,由于机翼两个表面的形状一样,因而气流速度一样,所产生的压力也一样,此时机翼不产生升力。
但是当对称机翼以一定的倾斜角(称为攻角或迎角)在空气中运动时,就会出现与非对称机翼类似的流动现象,使得上下表面的压力不一致,从而也会产生升力。
1.2重力重力是向下的作用力。
由于飞行员可以决定飞机的载重大小,所以某种程度上,你可以说这是人为可以控制的力量。
除了燃料随着旅程慢慢消耗之外,飞机的实际重量在航程中不大容易变动。
在等速飞行中(飞机的速度与方向保持一定不变),升力与重力维持着某种平衡。
1.3推力和阻力引擎驱动螺旋桨后,所产生的前进力量就是推力。
创想科学实验室冲锋动力火箭
1.提纲:本课程为配合火箭制造与发射之课程,学生们会先从讨论中熟悉每个火箭的基本部位,这会使他们在接下来更容易了解关于一般飞行和火箭飞行的三项基本原理。
为了让孩子们更加了解,还会参加一项有趣的汽球火箭比赛。
解释火箭的原理后,学生们会看到火箭起飞前的准备过程,学习发射前的安全措施。
之后他们会到教室外观看最后的好戏--从发射台上发射自己制作的火箭模型。
2.教育价值:这堂课让孩子们接触到了飞行的动力学,以及飞行工程的一些基本原理。
孩子们会在离开时对相当复杂的火箭设计和飞行的理论有初步了解。
这让他们为下一堂火箭制造课奠下了基础,学生们将会利用他们刚学到的新知识来制造自己的火箭。
3.「做做看」:享受一段亲子互相探索科学乐趣的时光4.活动一: 多段火箭的构造● 器材: 圆形气球(二十~二十五公分大)、长形气球(四十五公分长)● 实验步骤:1. 把纸杯底剪掉。
2. 将长形气球吹至7~8分饱。
3. 将长形气球的吹气口从纸杯杯口放入纸杯,从杯底拉出(注意勿使气球漏气)。
4. 将拉出的气球吹气口折出杯外,以手指压住固定在纸杯上。
5. 将圆形气球自纸杯底放入纸杯中(注意别让长形气球吹气口松脱漏气)。
6. 吹胀圆形气球直到可以卡住纸杯,而不会使长形气球松脱。
7. 以手指压住圆形气球吹气口,完成之火箭如图所示。
8. 放松手指使火箭飞行。
● 结论:圆气球内的空气一喷出来,圆气球会被往前推,纸杯会掉下来,而长气球会边收缩边往前飞出去。
5.● 科学原理:这样等于制作了一个三段式的火箭模型。
因为要把笨重宇宙飞船推上太空,需要非常大量的燃料,因而火箭的每一段都有引擎和燃料,当燃料一用完,那一段火箭就会脱落,减轻火箭的重量。
像这样每一段火箭把宇宙飞船往前推动,最后只会剩下有效负载的部份(宇宙飞船)上轨道,或飞往太空。
6.「科学字汇」:让充满好奇及努力自我充实的父母充电的园地7.火箭主体: 火箭的一部份,火箭的其它部位都与此部份相连。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录1 COP-FLY-I硬件结构 (2)2脱机运算器实验 (7)3 存储器实验 (14)4 微程序控制器实验 (18)5 模型计算机的实现 (26)1. COP-FLY-I硬件结构1.1 COP-FLY-I实验系统COP-FLY-I实验系统主要由以下部件构成:运算器电路、控制器电路、存储器电路、地址/时序电路、操作台、显示电路、逻辑笔电路以及软硬件通讯电路。
图1.1 COP-FLY-I实验系统整体结构框图1.2 COP-FLY-I实验系统的电气结构1、模型计算机时序信号COP-FLY-I模型计算机主时钟MF的频率为1MHz,执行一条微指令需要3个节拍脉冲T1、T2、T3。
COP-FLY-I模型计算机时序采用不定长机器周期,绝大多数指令采用2个机器周期W1、W2,少数指令采用一个机器周期W1或者3个机器周期W1、W2、W3。
2、模型计算机组成I 时序发生器时序发生器集成在时序控制电路小板上,产生节拍脉冲T1、T2、T3,节拍电位W1、W2、W3,以及中断请求信号ITNQ。
主时钟MF采用石英晶体振荡器产生的1MHz 时钟信号。
T1、T2、T3的脉宽为1微妙。
一个机器周期包含一组T1、T2、T3。
II运算器运算器集成在一片EPM1270的芯片内,主要由ALU加寄存器堆两部分构成。
寄存器堆包含2-4译码器、4个8位寄存器R0、R1、R2、R3,4选1选择器A,4选1选择器B。
2-4译码器产生信号LR0、LR1、LR2和LR3,选择数据线上的数据被保存到R0~R3的哪个寄存器,再由4选1选择器选择将R0~R3中的哪个数据送到ALU的A/B端口。
运算器对A端口和B端口的8位数进行加、减、与、或和数据传送5种运算,产生8位数据结果、进位标志C和结果为0标志Z。
当信号ALUBUS为1时,将运算的数据结果送数据总线DBUS。
III数据/地址开关AD9~AD010位数据/地址开关AD9~AD0是双位开关,拨到上边表示“1”,拨到下边表示“0”。
IV双端口RAM双端口RAM 由1片IDT7132及少许附加电路组成,存放程序和数据。
双端口RAM 是一种2个端口可同时进行读、写的存储器,2个端口各有独立的存储器地址、数据总线和读、写控制信号。
在COP-FLY-I中,双端口存储器的左端口是个真正的读、写端口,用于将数据总线DBUS上的数写入存储器;右端口设置成只读方式,从右端口读出的为指令,被送往指令寄存器IR。
V指令寄存器IR指令寄存器是1片74273,用于保存从双端口RAM中读出的指令。
它的输出IR7~IR4送往组合逻辑控制器、微程序控制器,IR3~IR0送往2选1选择器。
VI程序计数器PC、地址寄存器AR和中断地址寄存器IAR程序计数器PC、地址寄存器AR、中断地址寄存器IAR跟时序发生器都集成在时序小板上的CPLD内。
程序计数器PC向双端口RAM的右端口提供存储器地址PC7~PC0,可将存储器内的指令读出,具有PC复位、自动加1、PC和转移偏量相加的功能。
地址寄存器AR向双端口RAM的左端口提供存储器地址AR7~AR0,可将DBUS上的数据写入存储器,具有具有PC复位、自动加1功能。
中断地址寄存器保存中断时的程序地址PC。
VII微程序控制器微程序控制器产生COP-FLY-I模型计算机所需的各种控制信号。
它由5片HN58C65组成,存放微程序代码。
微地址的产生和译码电路也集成在时序小板上的CPLD内。
VIII组合逻辑控制器组合逻辑控制器由1片大型可编程器件EPM1270组成,产生COP-FLY-I模型计算机所需的各种控制信号。
该小板也可以由PC的USB口单独供电,独立工作。
可实现部分数字电路和EDA课程的实验。
IX程序下载电路为了对ROM和RAM芯片实现在线编程,我们在大板上放置了一片单片机,通过PC上的专用软件,即可实现:下载新的微程序到ROM,无需编程器;下载新的测试程序代码到RAM,免去手动输入测试程序代码的繁琐。
1.3模型计算机指令系统COP-FLY-I模型计算机是个8位机,字长是8位。
多数指令是单字指令,少数指令是双字指令。
指令使用4位操作码,最多容纳16条指令。
已实现加法、减法、逻辑与、加1、存数、取数、Z条件转移、C条件转移、无条件转移、输出、中断返回、开中断、关中断和停机14条指令。
指令系统如表1.1所示。
表1.1中,XX代表随意值。
Rs代表源寄存器号,Rd代表目的寄存器号。
在条件转移指令中,@代表当前PC的值,offset是一个4位的有符号数,第3位是符号位,0代表正数,1代表负数。
注意:@不是当前指令的PC值,是当前指令的PC值加1。
1.4 输入与输出A.输入设备——按钮1、启动按钮ST按一次启动按钮ST,则产生2个脉冲ST和ST#。
ST为正脉冲,ST#为负脉冲,脉冲的宽度与按下ST按钮的时间相同。
正脉冲ST启动节拍脉冲信号T1、T2和T3。
2、复位按钮RST按一次复位按钮RST,则产生2个脉冲RST和RST#。
RST为正脉冲,RST#为负脉冲,脉冲的宽度与按下RST按钮的时间相同。
负脉冲RST#使模型计算机复位,处于初始状态。
3、中断按钮按一次中断按钮,则产生2个脉冲PULSE和PULSE#。
PULSE为正脉冲,PULSE#为负脉冲,脉冲的宽度与按下PULSE按钮的时间相同。
正脉冲PULSE向 COP-FLY-I模型计算机发出中断请求。
B.输入设备——开关1、数据/地址开关AD9~AD0这10个双位开关的高两位AD9、AD8用于地址译码,产生内存芯片的片选信号。
低8位用于向寄存器中写入数据、向存储器中写入程序或者用于设置存储器初始地址。
当开关拨到朝上位置时为1,拨到向下位置时为0。
2、电平开关S15~S0这16个双位开关用于在实验时设置信号的电平。
每个开关上方都有对应的接插孔,供接线使用。
开关拨到上位置为1,拨到下位置为0。
3、单微指令开关STEP单微指令开关控制节拍脉冲信号T1、T2、T3的数目。
当单微指令开关STEP拨到上位时,实验系统处于单微指令运行方式,每按一次ST按钮,只产生一组T1、T2、T3;当单微指令开关STEP拨到下位时,处于连续运行方式,每按一次ST按钮,开始连续产生T1、T2、T3,直到按一次RST按钮或者控制器产生STOP信号为止。
4、控制器转换开关当控制器转换开关拨到上位时,使用组合逻辑控制器;当控制器转换开关拨到下位时,使用微程序控制器。
5、编程开关当编程开关拨到下位时,COP-FLY-I模型计算机处于正常工作状态;当编程开关拨到上位时,处于在线编程状态。
在编程状态下,可修改ROM内的微程序代码或者可修改RAM 内的测试程序代码。
6、操作模式开关OP4、OP3、OP2、OP1、OP0操作模式开关OP4、OP3、OP2、OP1、OP0的状态决定COP-FLY-I模型计算机的工作模式,其对应关系如下如下:C.输出设备——指示灯:为了在实验过程中观察各种数据,COP-FLY-I实验系统设计了大量的指示灯。
1、与运算器有关的指示灯数据总线指示灯D7~D0。
运算器A端口指示灯A7~A0。
运算器B端口指示灯B7~B0。
进位信号指示灯C。
结果为0信号指示灯Z。
2、与存储器有关的指示灯程序计数器指示灯PC7~PC0地址指示灯AR7~AR0扩展存储器地址指示灯EAR7~EAR0指令寄存器指示灯IR7~IR0双端口存储器右端口数据指示灯INS7~INS03、与微程序控制器有关的信号指示灯在使用微程序控制器时,控制信号指示灯指示微程序控制器产生的控制信号以及后继微地址NµA7~NµA0和判别位R4~R0,微地址指示灯指示当前的微地址µA7~µA0;在使用组合逻辑控制器时,微地址指示灯µA7~µA0、后继微地址NµA7~NµA0和判别位指示灯R4~R0没有实际意义。
4、其它指示灯手动模式指示灯:当它亮时,表示数据和控制信号的送入是人为手动干预;当它不亮时,表明自动运行程序。
组合逻辑控制器指示灯:亮时使用组合逻辑控制器;不亮时使用微程序控制器。
2.脱机运算器实验脱机运算器实验顾名思义就是把运算器从整机中脱离出来,单独对运算器进行控制的实验。
实验时,组合逻辑和微程序的控制器都不提供控制信号,运算器运行所需要的控制信号由大板右下方的16个开关提供;大板下方的数据地址开关提供运算的数据。
一、实验目的⑴熟悉运算器的数据传送通路;⑵验证运算器的加1、加、减、与、直通等功能;(3)按给定的数据,完成几种指定的算术、逻辑运算。
二、实验原理计算机系统由五大部分构成:输入设备、输出设备、运算器、存储器、控制器。
运算器承担执行算术、逻辑运算的功能。
通常由执行算术逻辑运算功能的ALU线路、暂存参加ALU运算的数据和中间运算结果的通用寄存器组、支持乘除法运算的专用寄存器三部分组成。
三个部分之间通过多路选择器线路实现连接,从而构成一个完整的运算器部件。
图2.1 运算器逻辑框图COP-FLY-I计算机组成原理实验系统的运算器部件由一片CPLD器件构成,算术逻辑运算单元是参照74LS181设计的,运算器部件的组成线路和信息连接关系如图2.1所示。
主体部分由ALU部件和寄存器堆构成;寄存器可以接收来自数据总线的8位数据,并作为A/B口的输入送到ALU 算术逻辑运算单元,ALU部件根据读到的控制信号,完成相应的算术和逻辑运算。
数据开关AD7~AD0是8个双位开关。
拨动这些开关,能够生成需要的AD7~AD0的值。
数据开关的值通过一片74LS244(SWD)控制是否送到数据总线上。
在信号SWBUS#为0时,AD7~AD0通过SWD送往数据总线DBUS。
在本实验中,使用数据开关AD7~AD0设置送往寄存器R0、R1、R2和R3的值。
寄存器堆包含4个8位的寄存器R0、R1、R2、R3,4选1选择器A,4选1选择器B。
运算器部件根据接收到的信号RD1、RD0进行译码,指示出被写的寄存器。
当DRW信号为1时,在T3的上升沿,将数据总线DBUS上的数写入译码指定的寄存器中。
再根据信号RD1、RD0的值,4选1选择器A从4个寄存器中选择1个寄存器送往ALU的A端口。
根据信号RS1、RS0的值,4选1选择器B从4个寄存器中选择1个寄存器送往ALU的B 端口。
ALU是参照74LS181设计来完成算术逻辑运算的。
ALU对来自A7~A0和B7~B0上的2个8位数据按照读到的控制信号M、CIN、S3、S2、S1、S0来进行算术逻辑运算,运算后的数据结果在信号ALUBUS#为0时送数据总线DBUS(D7~D0),运算后产生状态标志C和Z,如果LC、LZ信号为1,则在T3的上升沿保存进位标志位C和结果为0标志位Z。