四旋翼飞行器中PID控制的优化_李航
一种基于双环PID控制的四旋翼飞行器控制方式
F福建电脑UJIAN COMPUTER福建电脑2018年第9期基金项目:福建省中青年教师科研项目(JAT170862);福建师范大学协和学院大学生创新创业训练计划项目:Y2018134720071.引言飞行控制器是四旋翼飞行器最核心的部分。
飞行控制器通过各种外接传感器与外界做出交互,并且可以根据外界的各种状况做出应对,使四旋翼飞行器能够在没有外界操作的情况下实现自主飞行及循迹等其他复杂动作[1]。
四旋翼飞行器的姿态控制分为角度单环控制和角速度双环控制两种。
单环控制以飞行器的角度差作为唯一控制输入,计算得出控制输出信号。
双环控制以角度外环,角速度内环串级控制产生控制输出信号。
为了实现无人机的姿态稳定控制和快速响应,一般采用单环控制,或者内环采用简单的串行调速,外环采用PID 控制[2]。
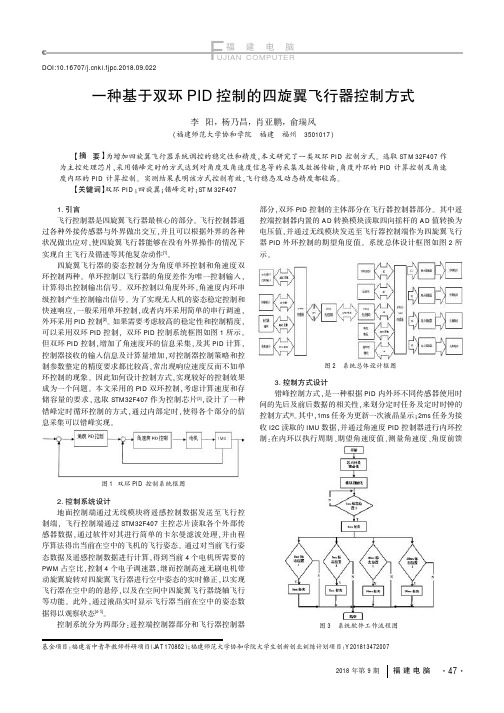
如果需要考虑较高的稳定性和控制精度,可以采用双环PID 控制,双环PID 控制系统框图如图1所示。
但双环PID 控制,增加了角速度环的信息采集,及其PID 计算,控制器接收的输入信息及计算量增加,对控制器控制策略和控制参数整定的精度要求都比较高,常出现响应速度反而不如单环控制的现象。
因此如何设计控制方式,实现较好的控制效果成为一个问题。
本文采用的PID 双环控制,考虑计算速度和存储容量的要求,选取STM32F407作为控制芯片[3],设计了一种错峰定时循环控制的方式,通过内部定时,使得各个部分的信息采集可以错峰实现。
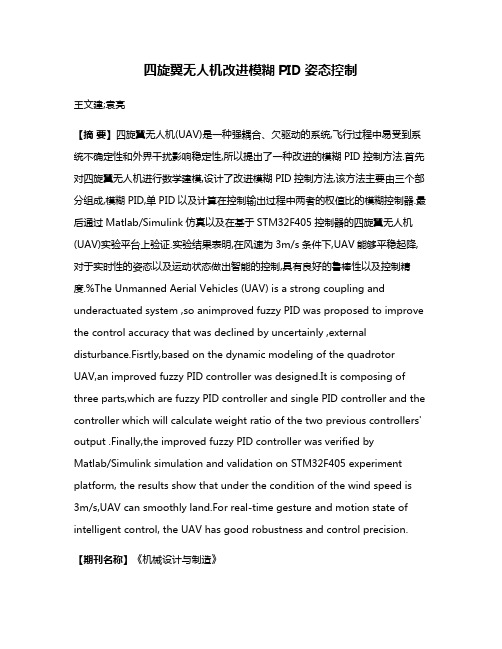
2.控制系统设计地面控制端通过无线模块将遥感控制数据发送至飞行控制端,飞行控制端通过STM32F407主控芯片读取各个外部传感器数据,通过软件对其进行简单的卡尔曼滤波处理,并由程序算法得出当前在空中的飞机的飞行姿态。
通过对当前飞行姿态数据及遥感控制数据进行计算,得到当前4个电机所需要的PWM 占空比,控制4个电子调速器,继而控制高速无刷电机带动旋翼旋转对四旋翼飞行器进行空中姿态的实时修正,以实现飞行器在空中的的悬停,以及在空间中四旋翼飞行器绕轴飞行等功能。
四旋翼无人机改进模糊PID姿态控制
四旋翼无人机改进模糊PID姿态控制王文建;袁亮【摘要】四旋翼无人机(UAV)是一种强耦合、欠驱动的系统,飞行过程中易受到系统不确定性和外界干扰影响稳定性,所以提出了一种改进的模糊PID控制方法.首先对四旋翼无人机进行数学建模,设计了改进模糊PID控制方法,该方法主要由三个部分组成,模糊PID,单PID以及计算在控制输出过程中两者的权值比的模糊控制器.最后通过Matlab/Simulink仿真以及在基于STM32F405控制器的四旋翼无人机(UAV)实验平台上验证.实验结果表明,在风速为3m/s条件下,UAV能够平稳起降,对于实时性的姿态以及运动状态做出智能的控制,具有良好的鲁棒性以及控制精度.%The Unmanned Aerial Vehicles (UAV) is a strong coupling and underactuated system ,so animproved fuzzy PID was proposed to improve the control accuracy that was declined by uncertainly ,external disturbance.Fisrtly,based on the dynamic modeling of the quadrotor UAV,an improved fuzzy PID controller was designed.It is composing of three parts,which are fuzzy PID controller and single PID controller and the controller which will calculate weight ratio of the two previous controllers' output .Finally,the improved fuzzy PID controller was verified byMatlab/Simulink simulation and validation on STM32F405 experiment platform, the results show that under the condition of the wind speed is3m/s,UAV can smoothly land.For real-time gesture and motion state of intelligent control, the UAV has good robustness and control precision.【期刊名称】《机械设计与制造》【年(卷),期】2017(000)008【总页数】4页(P9-12)【关键词】PID控制;模糊控制;联合控制;稳定性;鲁棒性【作者】王文建;袁亮【作者单位】新疆大学机械工程学院,新疆乌鲁木齐 830047;新疆大学机械工程学院,新疆乌鲁木齐 830047【正文语种】中文【中图分类】TH16;TP273.4四旋翼无人机涉及的主要工作包括:姿态的解算,姿态控制,定高,定点,自主导航。
四旋翼飞行控制系统的模糊pid控制策略研究

四旋翼飞行控制系统的模糊pid控制策略研究
近年来,随着四旋翼飞机在军民用方面的应用大火,如何更好地控制四旋翼飞机飞行姿态受到广泛关注和研究,PID控制方法是四旋翼飞机飞行控制的主要方法之一。
然而由于传统PID控制方法存在很多问题,比如难以获得最优的控制参数,控制系统收敛的速度慢,响应延迟等现象,因此,无法有效满足四旋翼飞机的飞行需求,针对此种情况,模糊PID控制策略应运而生,以采用模糊技术也即模糊逻辑来改善传统PID算法的运行效果,弥补其缺陷。
模糊PID控制策略是将模糊PID控制算法用于控制四旋翼飞机,结合速度环和角度环的模糊调节和传统PID调节相结合,实现四旋翼飞机的飞行控制。
根据飞机的飞行特性及其需求,采用变结构参数控制方法实现控制系统的灵活调节,从而改善四旋翼飞机的操作性能。
模糊PID控制策略还可以减少PID控制微分项代替增量偏差轴,对参数决策设置更广泛范围,进而减少控制参数的非线性性,控制目标使参数实时得到最优化,使系统性能更好。
模糊PID控制策略极大地提升了四旋翼飞机的飞行控制性能,比传统PID控制性能优越,为解决目前四旋翼飞行控制中的抗干扰,快速运动特性,响应速度慢等问题提供了一种更具有灵活性和计算优势的控制器,可以更好地满足飞行飞行的实际需求,是未来飞行控制系统研究的重要方向。
四旋翼飞行器建模、仿真与PID控制
可得由机体坐标系变换至地面坐标系的转换矩阵Rg / b。
角速度之间的关系。 (11)
根据前文假设,本文研究的情况为四旋翼无人机小角度、低速 度飞行,因此可以做如下近似。
(12) 即:
(13) 通过对进行变换,令:
(14)
可得四旋翼飞行器最终模型。
(4)
(15)
最终得到Rg / b。
(5) 2.2 四旋翼动力学建模
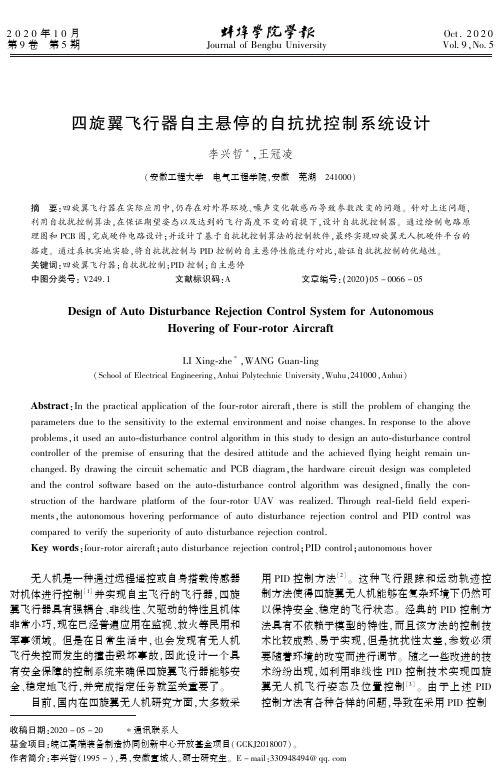
图3 地面坐标系与机体坐标系
四旋翼动力学分析中常用的坐标系是机体坐标系
与地面坐标系
(张海星.四旋翼飞行器建模与控制器设计
[D].南昌:华东交通大学,2018)。
其中,地面坐标系定义如下:选取地面上的一点,即四旋翼至地球
中心连线与地面的交点,定义X轴指向水平正东方向,Y轴指向水平正
北方向,Z轴垂直于XOY平面,指向天空,即与重力方向相反。
过三次欧拉旋转获得(许喆.四旋翼无人机控制系统的设计与实现 [D].南京:南京理工大学,2017):
首先,绕Zb转动ψ角,变换至中间坐标系A,此变换矩阵记作RA / b。
(1) 之后,绕转动θ角,变换至中间坐标系B,此变换矩阵记作RB /A。
(2) 最后,绕转动φ 角,变换至地面坐标系,此变换矩阵记作Rg / B。
为X、Y、 (8)
同理,可以写出机体坐标系下三个力矩平衡方程(冯培晏.四旋翼 无人机建模与PID控制器设计[J].工业设计,2018(6):135-137)。
(9)
其中p、q、r为绕机体坐标系三轴的角速度,
为绕
机体坐标系三轴所受力矩,
为绕机体坐标系三轴的转动惯
量。进一步对转动力矩进行分析:
(10)
其中,l为四旋翼机臂长,d为电机反扭矩系数。 可以写出机体坐标系下各轴角速度与四旋翼滚转、俯仰、偏航
四旋翼飞行器自主悬停的自抗扰控制系统设计
problemsꎬit used an auto ̄disturbance control algorithm in this study to design an auto ̄disturbance control
李兴哲等 四旋翼飞行器自主悬停的自抗扰控制系统设计
技术设计的四旋翼飞行器控制系统中ꎬ在遇到外加
的干扰时ꎬ飞行器会有较大的抖动ꎮ 这是由于 PID
控制的好坏主要取决于所确定的参数ꎬ如果环境发
生改变ꎬ参数不在适用ꎬ就会导致飞行器的飞行失
控ꎮ
67
言采用自抗扰技术的火电站球磨机制粉系统控制精
度比传统的 PID 控制要优秀 [6] ꎮ 本文通过对自抗
用 PID 控制方法 [2] ꎮ 这种飞行跟踪和运动轨迹控
制方法使得四旋翼无人机能够在复杂环境下仍然可
非常小巧ꎬ现在已经普遍应用在监视、救火等民用和
法具有不依赖于模型的特性ꎬ而且该方法的控制技
以保持安全、稳定的飞行状态ꎮ 经典的 PID 控制方
军事领域ꎮ 但是在日常生活中ꎬ也会发现有无人机
术比较成熟、易于实现ꎬ但是抗扰性太差ꎬ参数必须
and the control software based on the auto ̄disturbance control algorithm was designedꎬfinally the con ̄
struction of the hardware platform of the four ̄rotor UAV was realized. Through real ̄field field experi ̄
四旋翼飞行器反步自适应PID控制
第26卷第2期2019年2月Vol.26No.2Feb.2019电光与控制Electronics Optics&Control引用格式:刘苏漫,杨晓慧,李文明•四旋翼飞行器反步自适应PID控制[J].电光与控制,2019,26(2):76-79.LIU S M,YANG X H,LI W M.Inversion adaptive PID control for quadrotor air vehicles[J.Electronics Optics&Control,2019.26(2):76-79.四旋翼飞行器反步自适应PID控制刘苏漫,杨晓慧,李文明(长春理工大学,长春130022)摘要:针对四旋翼姿态控制算法的优化问题,提出了一种基于反步自适应控制与经典PID控制相结合的优化控制算法。
该组合算法是将由不同控制算法设计出的控制器结合使用,即将控制系统分为两个回路:姿态角及高度通道为内回路,平面通道x和y为外回路仿真结果表明,反步自适应PID控制算法有着非常好丝控制性能,与其他控制算法相比,在稳定性、响应、抗干扰性及精确度等方面都有校大的提高.关键词:四旋翼飞行器;PI1)控制;反步自适应控制;反步自适应PID控制中图分类号:TP273文献标志码:A doi:10.3969/j.issn.1671-637X.2019.02.016Inversion Adaptive PID Control for Quadrotor Air VehiclesLIU Su-man,YANG Xiao-liui,LI Wen-ming(Changchun University of Science and Technology,Changchun130022,China) Abstract:An optimization control algorithm based on the combination of inversion adaptive control and classic PID control is proposed for the optimization of the quadrotor attitude control algorithm.The algorithm uses the controllers designed by different control algorithms in combination.The control system is divided into two loops:the attitude angle and height channel are inner loops,and the plane channels x and y are outer loops.The simulation results show that the inversion adaptive PID control algorithm has a very good control pared with other control algorithms,it has a great improvement on stability, response,anti-jamming ability and accuracy.Key words:quadrotor air vehicle;PID control;inversion adaptive control;inversion adaptive PID control0引言四旋翼飞行器作为多旋翼无人机的一种,凭借其机动性强、稳定性高、操作简单、可垂直起降等优势,在军用和民用领域备受青睐'四旋翼飞行器是具有6自由度和4控制量的强耦合、欠驱动的非线性控制系统。
基于PID算法的四旋翼飞行器定点跟踪控制
计 算 机 测 量 与 控 制 .2016. 24(7) Computer Measurement & Control
文章编号:1671 - 4598(2016)07 - 0109 -04 D O I:10.16526/j .cnki.11—4762/tp.2016. 07.029 中图分类号:TP 301.6
ding a basis for furture study on the quadrotor.
Keywords:quadrotor;dynamic model;double close —loop;PID control;set— point tracking
0 引言 随 着 计 算 机 技 术 和 自 动 化 技 术 的 不 断 发 展 ,旋翼式飞行器
技术在越来越多的领域有广阔的应用前景,四旋翼飞行器是一 种结构紧凑、飞 行 方 式 独 特 的 垂 直 起 降 式 飞 行 器 ,具有欠驱 动 、强耦合的特点,通过调节对称分布的四个旋翼转速,实现 对 飞 行 姿 态 的 控 制 。 由 于 它 具 有 普 通 无 人 机 没 有 的 优 势 ,如垂 直起降、协调转弯、空 中悬停、侧 飞 、前 飞 等 多 种 飞 行 模 态 , 这决定了它在军用方面可以应用于进行侦查、攻击、通 信 、监 视等工作,在 民 用 方 面 可 以 应 用 于 航 拍 、交 通 监 控 、大气检
the set —value of the attitude results form the inverse solution of outer ring? s o u tpu t,that the error between the set—value and actual a tti
PID控制及图像识别的自主循迹四旋翼设计
Key words:image processing and tracking;PID algorithm ;STM 32F407;M PU一9150;OV7670visual sensor;US-IO0 ultrasonic sensor
PID算法在四旋翼飞行器上的应用
PID算法在四旋翼飞行器上的应用
四旋翼飞行器是一种通过四个螺旋桨产生升力和推力来实现飞行的无人机。
PID算法
是一种常用的控制算法,用于调节系统的输出和目标值之间的误差,并根据误差来调整系
统的输入,以使系统达到期望的目标。
PID算法由三个部分组成:比例(P)、积分(I)和微分(D)。
比例部分用于根据当前误差的大小来调整系统的输出;积分部分用来根据误差积累的历史信息来调整输出;微
分部分用来根据误差变化的速率来调整输出,以防止超调或震荡。
在四旋翼飞行器上,PID算法用于控制飞行器的姿态(俯仰、横滚和偏航)。
飞行器的姿态控制是通过调整不同桨叶的旋转速度来实现的。
根据飞行器的传感器读数和期望姿态,PID算法可以计算出每个桨叶的调整量,以使飞行器保持期望的姿态。
比例部分根据当前姿态误差的大小来调整桨叶的旋转速度。
如果飞行器的姿态偏离了
期望值,比例控制器会增加或减小桨叶的旋转速度,以尽量减小误差。
通过比例、积分和微分部分的组合,PID算法可以有效控制四旋翼飞行器的姿态。
PID 算法仍然存在一些问题,例如参数调节困难、不稳定性等。
一些改进的控制算法,例如模
糊控制、自适应控制等也被应用到四旋翼飞行器的控制中。
PID算法在四旋翼飞行器上的应用是十分重要的。
它通过调节飞行器桨叶的旋转速度,实现飞行器姿态的控制。
PID算法仍然存在一些问题,需要进一步改进和优化。
基于BP神经网络的PID控制算法在四轴飞行器中的应用

基于BP神经网络的PID控制算法在四轴飞行器中的应用四轴飞行器是一个非线性、时变的控制系统,由于典型PID算法缺乏自适应能力,典型的PID控制算法对四轴飞行器无法达到较好的控制效果,于是提出了基于BP神经网络的智能PID控制算法。
本文首先通过选取适当的坐标系统对旋翼受力进行了近似和简化处理建立其数學模型,根据得到各通道的传递函数,然后使用BP神经网络PID控制方法对四轴飞行器进行控制,实现PID参数自动调整,结果表明BP神经网络PID控制对非线性系统及其参数具有良好的控制效果,而且具有更好的适应性,同时也具有很好的逼近和容错能力。
标签:BP 神经网络;PID控制;四轴飞行器Abstract:Quadrocopter is a nonlinear,time-varying control system. The typical PID control algorithm can’t achieve a good control effect due to the lack of adaptability. Then this work proposed the intelligent PID control algorithm based on BP neural network. Firstly,the force of the rotor was simplified to establish the mathematical model by choosing an appropriate coordinate system and obtain transfer functions for each channel based on the formula . Then by using the BP neural network PID control algorithm to control the quadrocopter,it can achieve automatic adjustment in PID parameters. The results show that BP neural network PID control algorithm has good control effect on the nonlinear system and parameters,not only adaptability and robustness,but also approximation and fault tolerance.Key words:BP neural network;PID control;quadrotor引言近年来,四旋翼飞行器逐渐成为无人机研究的前沿和热点。
四旋翼飞行器巡线算法的研究
四旋翼飞行器巡线算法的研究【摘要】本文提出了一种适用于四旋翼飞行器巡线的控制算法,解决了其他巡线方式的巡线不精确问题。
在带有线性CCD的四旋翼飞行器上开发和实现了这一巡线算法,并进行多次巡线测试,验证了该算法的可行性和有效性,且可以增强巡线控制系统的鲁棒性。
【关键词】四旋翼飞行器串级PID 巡线Abstract:This paper proposes a control algorithm which is applicable for the quadrocopter,and solved the inaccurate problem of other patrol algorithms. Developed and realized this patrol algorithm on the aircraft with a linear CCD. We experimented this patrol algorithm for many times and verified the feasibility and validity of the algorithm,and this algorithm can enhance the robustness of the control system of the patrol.Keywords:Quadrocopter Cascade PID control Patrol algorithm1一、引言四旋翼飞行器是近年兴起的一种微型飞行器。
相对于固定翼飞行器,四旋翼飞行器具有控制灵活、抗干扰能力强、飞行稳定的优点。
在很多领域得到了应用,例如:航拍[1]、电力线路检测[2]、地势侦查[3]等。
因此,近年来四旋翼飞行器成为微型飞行器中的一个重要研究方向。
本文就如何设计四旋翼飞行器巡线算法进行了研究。
整体设计结构图如图(1)所示,采用主频为72MHz的32位ARM处理器STM32F103作为主控。
四旋翼飞行器PID控制器的设计
I
四旋翼飞行器 PID 控制器的设计
Design of PID controller for a quadrotor
四旋翼飞行器PID优化控制
四旋翼飞行器PID优化控制
王史春
【期刊名称】《河北科技大学学报》
【年(卷),期】2013(034)005
【摘要】针对四旋翼飞行器具有非线性,强耦合性,多输入的欠驱动系统的特点,研制出既能精确控制飞行器姿态,又具有较强抗干扰和环境自适应能力的控制器.为了达到更好的飞行效果,采用了传统的PID控制算法,但实际应用中需要对PID参数进行优化,提出改进的PSO算法和遗传算法相结合的优化控制方法.为了优化PID参数,首先对飞行器进行动力性建模,再利用改进的PSO算法和遗传算法作PID参数优化.仿真和飞行实践的数据表明,相对于标准的PSO算法,飞行器有更好的鲁棒性和控制效果.
【总页数】8页(P457-463,486)
【作者】王史春
【作者单位】台州职业技术学院,浙江台州 318000;浙江大学智能系统与控制研究所,工业控制技术国家重点实验室,浙江杭州 310027
【正文语种】中文
【中图分类】TP391.9
【相关文献】
1.基于PD控制器的四旋翼飞行器参数优化控制 [J], 郑凯琪;王家军
2.基于改进樽海鞘群算法的四旋翼飞行器姿态优化控制 [J], 丁力; 高振奇; 虞青
3.基于RBF神经网络的X型四旋翼飞行器优化控制 [J], 张莹; 刘子龙
4.四旋翼飞行器串级模糊自适应PID优化控制系统研究 [J], 盛广润;高国伟;李璇烨;罗丹
5.基于RBF神经网络的X型四旋翼飞行器优化控制 [J], 张莹;刘子龙
因版权原因,仅展示原文概要,查看原文内容请购买。
四旋翼飞行器姿态角的自切换串级PID控制方法

四旋翼飞行器姿态角的自切换串级PID控制方法
丁娃;吴功平;何文山;李谋远
【期刊名称】《机械设计与制造》
【年(卷),期】2022()6
【摘要】四旋翼飞行器的姿态控制是无人机稳定飞行的关键技术之一。
针对复杂多变作业条件下飞行器参数会经常发生变化的问题,在典型控制方法的基础上提出一种自适应的智能控制方法。
首先,根据牛顿欧拉定律推导出无人机在地理坐标系下的动力学模型,并对其中参数进行测量计算;然后基于三角形隶属度函数建立模糊控制器,作为外环自主切换的两种控制方式之一,并设置平滑切换过程;最后结合外环对姿态角的控制方法以及内环对角速度快速调整的PD控制方法,实现了无人机串级PID控制方法。
仿真和实验结果表明,该系统能够有效控制四旋翼飞行器的飞行姿态。
相比较其它算法,其具有更好的鲁棒性和姿态调节的快速性。
提升了无人机在飞行过程中抵抗环境扰动和系统动态响应的能力,为四旋翼飞行器控制研究提供了重要的理论与实践基础。
【总页数】6页(P208-213)
【作者】丁娃;吴功平;何文山;李谋远
【作者单位】武汉大学动力与机械学院
【正文语种】中文
【中图分类】TH16;TP30
【相关文献】
1.四旋翼飞行器双闭环串级PID姿态控制算法
2.四旋翼飞行器的串级PID姿态控制
3.四旋翼飞行器串级姿态稳定性优化控制研究
4.四旋翼飞行器串级姿态稳定性优化控制研究
5.串级抗扰PID四旋翼飞行器控制系统研究
因版权原因,仅展示原文概要,查看原文内容请购买。
四旋翼无人机预设性能自适应PID控制
四旋翼无人机预设性能自适应PID控制
王安琪;李俊丽;夏国锋;陈河江
【期刊名称】《控制工程》
【年(卷),期】2024(31)5
【摘要】针对四旋翼飞行器在轨迹跟踪过程中存在建模误差和外界干扰问题,设计了一种双闭环控制系统。
内环姿态环采用自适应PID算法,用滑模算法作为自适应
机制,结合梯度下降法克服传统PID需要手动调节参数的问题,并用RBF神经网络消除滑模控制过程中产生的抖振现象;外环位置环采用预设性能自适应PID算法,即在自适应PID算法的基础上加上预设性能控制,将误差用预设性能函数进行转换,使系统误差能够始终稳定在预设值,实现位置的快速跟踪;最后用Lyapunov函数证明系统的稳定性。
从跟踪的快速性、稳定性和稳态性能方面,由仿真结果对比证明本文
所设计的控制算法有很大的优越性,并能对不同形式的外部扰动表现出强抗干扰性。
【总页数】11页(P865-875)
【作者】王安琪;李俊丽;夏国锋;陈河江
【作者单位】昆明理工大学信息工程与自动化学院
【正文语种】中文
【中图分类】TP273
【相关文献】
1.六旋翼植保无人机模糊自适应PID控制
2.四旋翼无人机预设性能非线性PI串级
姿态控制3.四旋翼无人机串级模糊自适应PID控制系统设计4.四旋翼无人机模糊
自适应PID系统设计5.基于MATLAB的四旋翼无人机PID控制和ADRC控制研究
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Fi(sin准sinφ+cos准sinθcosφ-k1x觶 ) m
Σ
ΣHale Waihona Puke Σ4Σ Σ
ΣΣ
Σ
ΣΣy咬 =
Fy- k2y
=
i=1
Fi(-sin准cosφ+cos准sinθsinφ-k2y觶 )
Σ Σ
m
m
Σ
Σ
4
Σ Σ
Σ
Σ
z咬Σ
Σ ΣΣ
=
Σ
Fz- k3z - mg m
=
i=1
Fi(cos准cosθ-k3 z觶 ) -g
测 控 技 术 与 仪 器 仪 表 Measurement Control Technology and Instruments
四旋翼飞行器中 PID 控制的优化*
李 航,王耀力
( 太 原 理 工 大 学 信 息 工 程 学 院 , 山 西 太 原 030024 )
摘 要: 为解决四旋翼飞行器飞行过程中的不稳定和灵敏度问题,在四旋翼飞行器数学模型基础上,提出利用共轭
* 基 金 项 目 : 山 西 省 自 然 科 学 基 金 ( 2013011015 - 1 )
《 电 子 技 术 应 用 》 2017 年 第 43 卷 第 2 期
按照发展阶段,自整定分为常规自整定和智能自整 定 两 类 , 常 规 PID 参 数 自 整 定 按 其 工 作 机 理 分 为 两 种 : 基 于 规 则 的 自 整 定 方 法 和 基 于 模 式 辨 识 的 自 整 定 方 法[3]。
型:
Σ
ΣΣx咬
=
u1 ( sin准sinφ + cos准sinθcosφ )
Σ Σ
m
Σ
Σ
ΣΣy咬
=
u1 ( - sin准cosφ + cos准sinθsinφ )
Σ Σ
m
Σ
Σ
ΣΣz咬
Σ ΣΣ
=
u1 ( cos准cosθ - mg ) m
Σ
ΣΣθ咬 =
lu2
(3)
Σ Σ
Ix
Σ
Σ
准咬Σ
Σ Σ
=
Σ
Σ
lu3 Iy
基于规则的自整定方法在参数整定及控制过程方 面不需要特定经验,还可以将过程特性和干扰特性区分 开,但是需要技术人员对每一个回路和控制参数都有深 入和全面的了解。 对于控制系统,要求明确哪个控制参 数需要调节,但是需要调节的控制参数不容易确定。
基于模式辨识自整定的方法简单、直观、易实现,但 是在实际工业生产过程中,因其非线性、动态性、系统的 噪声和结构的复杂性等特点,该方法并没有取得预期的 结果,而且该方法工作量比较大。
普 通 PID 控 制 飞 行 器 平 稳 状 态 下 存 在 的 0.5° 偏 差 , 且 稳 定 性 较 好 。
关 键 词 : 四 旋 翼 飞 行 器 ; 数 字 PID ; 共 轭 梯 度 算 法 ; 自 整 定 ;LabVIEW
中 图 分 类 号 : TP273.24
文献标识码: A
DOI :10.16157/j.issn.0258- 7998.2017.02.017
图 2 控制系统模型
由 图 2 知 四 旋 翼 飞 行 器 的 飞 行 姿 态 是 由 PID 控 制 器通过调节 4 个电机的转速来实现,为了增强四旋翼飞
行 器 飞 行 姿 态 的 稳 定 性 和 可 靠 性 , 对 PID 控 制 器 进 行 优
化 是 必 要 的 。 为 此 提 出 了 共 轭 梯 度 算 法 对 PID 控 制 参 数
的自整定,从而使控制系统输出达到最优。
2 共 轭 梯 度 算 法 对 PID 参 数 的 整 定
在 四 旋 翼 飞 行 器 数 学 模 型 的 基 础 上 , 根 据 PID 控
制 系 统 的 输 出 u(k)和 整 个 系 统 的 输 出 y(k)组 成 数 据 序列,在设计过程中引入参数 γ,通过对 γ 不断进行
梯 度 算 法 对 数 字 PID 控 制 器 的 参 数 进 行 自 整 定 。 将 控 制 性 能 指 标 的 最 小 方 差 和 控 制 率 相 结 合 , 共 轭 梯 度 算 法 迭 代 计
算出随被控系统不断变化的最优化特性参数, 有效地提高系统的鲁棒特性。 该算法不仅克服了对模型辨识度的依
随着科技发展,智能参数自整定相继出现。 其中模 糊 推 理 整 定[4]不 需 要 精 确 的 数 学 模 型 , 具 有 较 强 的 鲁 棒
73
测 控 技 术 与 仪 器 仪 表 Measurement Control Technology and Instruments
性 , 但 是 它 依 赖 于 确 定 的 PID 参 数 , 属 于 一 种 局 部 寻 优 算法;遗传算法降低了设计难度,具有良好的鲁棒性和 全局性,但其存在收敛性、局部搜索能力差等问题。本文 是 在 智 能 PID 控 制 的 基 础 上 , 提 出 结 合 共 轭 梯 度 算 法 对 数 字 PID 控 制 参 数 进 行 自 整 定 , 将 控 制 性 能 指 标 的 最 小 方差和控制率相结合,根据梯度算法迭代出被控系统不 断 变 化 的 参 数 , 使 PID 控 制 器 的 效 率 得 以 提 升 , 提 高 了 系统的鲁棒特性、可靠性和准确性。 1 四旋翼飞行器建模
中 文 引 用 格 式 : 李 航 , 王 耀 力 . 四 旋 翼 飞 行 器 中 PID 控 制 的 优 化 [ J ] . 电 子 技 术 应 用 , 2017 , 43 ( 2 ) : 73 - 76 . 英 文 引 用 格 式 : Li Hang , Wang Yaoli . Optimization of PID control in four rotor aircraft [ J ] . Application of Electronic Technique , 2017 , 43(2 ) : 73-76.
Σ
φ咬Σ
Σ Σ
=
Σ Σ
Σ
lu4
′
Iz
四 旋 翼 飞 行 器 是 用 PID 控 制 器 作 为 控 制 系 统 , 其 控
制系统模型如图 2 所示。
图 1 四旋翼飞行器工作原理图
四旋翼飞行器在全局坐标系下沿 X、Y、Z 轴的线 位
移运动方程为:
Σ
4
Σ Σ
Σ
Σ
x咬Σ
Σ Σ
=
Σ
Fx- k1x觶 m
=
i=1
四旋翼飞行器是固定在一个十字交叉的结构上,由 4 个电机驱动螺旋桨的转动,并且通过螺旋桨速度的改 变 来 改 变 飞 行 器 的 姿 态[5]。 其 工 作 原 理 图 如 图 1 所 示 。
ψ
θ 准
其 中 ,l 是 四 旋 翼 飞 行 器 重 心 到 螺 旋 桨 的 距 离 ,ki(i =4 ,5 ,
Abstract : In order to solve the problem of instability and sensitivity during flight of the quad -rotor aircraft , the conjugate gradient algorithm was introduced to self -tune the digital PID control parameters based on the mathematical model of quad -rotor aircraft. Combined the minimum -variance of control performance with control rate, the conjugate gradient algorithm interactively calculate the most optimized control parameters for the controlled system with changing characteristics , which can effectively improve the robustness of the system. This algorithm overcomes the identification of mathematical model and manual parameters settings , avoids unpredictable results in the absence of control rules . Taking the roll angle offset of quad -rotor aircraft from 13 ° to steady state and its stability as an example and simulating with LabVIEW , it is proved that the algorithm efficiency is improved by 50% compared with conventional algorithm, the deviation is less than ordinary PID control which is 0. 5 ° at steady state, and the stability is also perfect. Key words : quad-rotor aircraft ; digital PID ; the conjugate gradient algorithm ; self-tuning ; LabVIEW
6)是四旋翼飞行器在角位移运动是的空气阻力系数,I 是
每个轴上的转动惯量
′
Iz
=
Iz l
,M 是每个螺旋桨产生的扭
动 力 矩[6]。