切段式甘蔗联合收割机机架运动仿真分析
小型甘蔗收获机台架机构设计优化及其仿真分析的开题报告
小型甘蔗收获机台架机构设计优化及其仿真分析的开题报告一、研究背景甘蔗是一种重要的工业原料和食用作物,其种植已经广泛分布在世界各地。
随着现代化技术的发展,传统的手工收获已经不能满足现代化农业的需求。
因此,机械收获成为了一种重要的替代方式。
然而,目前市场上的甘蔗收获机大多数是大型的机械,价格昂贵,使用不灵活,不适合小农户使用。
由此,小型甘蔗收获机的需求日益增加。
二、研究目的和内容本研究旨在设计并优化小型甘蔗收获机的台架机构,对其进行仿真分析,以实现机构优化及性能提升。
具体研究步骤如下:1. 了解小型甘蔗收获机的特点和市场需求,确定机器的尺寸和功能要求。
2. 分析小型甘蔗收获机的台架机构,设计机器的工作装置。
3. 对台架机构进行优化设计,提高机器的稳定性和工作效率。
4. 利用SolidWorks等工具进行虚拟系统建模和仿真分析。
5. 对仿真结果进行模拟实验验证,修改设计。
三、研究意义本研究的成果将推动小型农业机械化的发展,降低农户的劳动强度和成本,提高农业生产效率。
同时,也将为小型农业机械的研究和开发提供经验和基础。
四、研究方法本研究采用理论分析与实验验证相结合的方法。
理论分析主要运用机械设计、动力学、材料力学、流体力学等方面的知识,对小型甘蔗收获机的台架机构进行分析、优化和设计。
实验验证主要是通过制作小型甘蔗收获机样机,对其性能进行测试和分析,以验证理论分析的正确性和可行性。
五、研究进度安排本研究计划分为以下几个阶段:1. 文献综述,了解小型甘蔗收获机的发展现状和研究领域的最新进展。
2. 设计与制造小型甘蔗收获机的样机,并进行性能测试。
3. 对样机的设计进行理论分析和仿真分析。
4. 根据实验和仿真分析结果,对样机进行改进和优化。
5. 完成论文的撰写和论文答辩。
六、预期成果通过本研究,预计可以获得以下几个方面的成果:1. 设计出一种新型的小型甘蔗收获机。
2. 对小型甘蔗收获机的台架机构进行优化,提高了机器的稳定性和效率。
甘蔗收割机机架虚拟样机的模态分析与优化设计_胡迎春

计算机辅助设计与图形学学报
J OU RNAL OF COMPU TER2A IDED DESIGN & COMPU TER GRAPHICS
Vol118 , No 18 Aug1 , 2006
应用荟萃
甘蔗收割机机架虚拟样机的模态分析与优化设计
胡迎春
1) 2) 3)
x nci , …, x N ] T ∈ R N
na i
min W ( X ) =
nci
i =1
∑L 1ρ (βx )
i i i
N
+ ( 1)
i = na i +1
∑ A ρx
i i
i
+
i = nci +1
∑ L 2ρ (πx 2 )
i i i
结构分析 crop 1 RST 文件中 ,其中包括固有频率 、 已扩展的振 型、 相对应力和力分布1 可以在普通后处理器 POST1 中查看 模态分析结果1
1) 2) 3)
( Depart ment of Com puter Engi neeri ng , Guangxi U niversity of Technology , L i uz hou 545006) ( Depart ment of Mechanical Engi neeri ng , Guangxi U niversity of Technology , L i uz hou 545006) ( College of Mechanical Engi neeri ng , Guangxi U niversity , N anni ng 530004)
Step21 加载并求解1 定义分析类型和分析选项 、 施加载
甘蔗收割机机架虚拟样机的模态分析与优化设计
Ab t a t sr c
I i a mo a a ay i e e l t a e lW r e i r t n mo e a ev r i l i f e c n nt l d l n l s r v as h taf w O o d rvb a i d sh v e y l t n l n eo i s o te u
( xz y @ s h .o g l c o u cm) h
南宁
50 0 ) 30 4
摘
一
要
对甘 蔗收割机的机架虚拟样 机进行了模态分析 , 发现其低阶模态振 型对甘蔗 收获质量 的影 响并不 大 , 采用
阶 方 法 对 机 架 整 体 作 静 力 强 度 优 化 , 证 了 结 构 综 合 应 力 在 材 料 许 用 屈 服 应 力 10 a 围 内 使整 体 质 量 降 低 约 保 9 MP 范
关键 词
模 态 分 析 ; 型 ; 构 优 化 ; 阶 方 法 振 结 一
TH13 2 1 . 2
中 图 法分 类 号
M o a d lAna y i n s g l ss a d De i n Optm i a i n f r Vi t a o o y n fU p i tDe i e i z to o r u lPr t t pi g o lf v c
维普资讯
第1卷 8
第 8期
计算机 辅 助设计 与 图形学 学报
J OURNAL OF OMPUTE AI D C R— DE DES GN & C I OM P UTER GR
20 0 6年 8月
o u a c n a v se fa S g r a e H r e t r
Hu Yi g h n ) Li h n p n Ch n S u u ’ n cu 1 a g ig ) S e h x n)
切断式甘蔗联合收获机的试验与分析
(E 通讯 作者 : 区颖刚 ( 1947- ) , 男, 广东 新会 人 , 教 授, 博 士生 导师 , 2 800 mail ) ouy ing@� s cau.e �
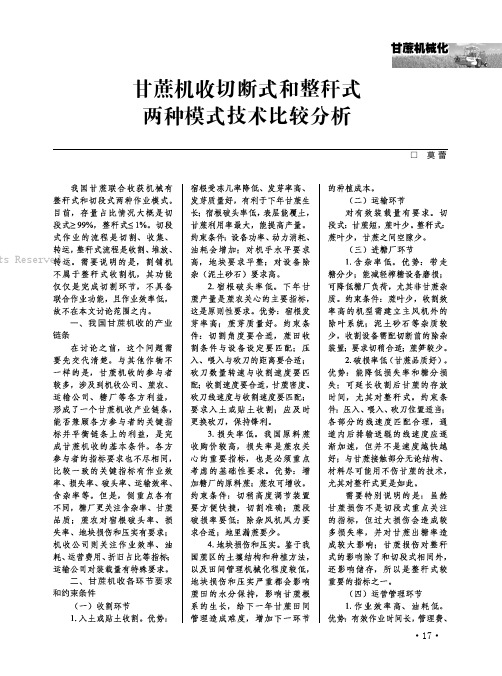
损失率 /% : 10 zzq par k@ � 12 6 .com � � � � � 外形尺寸( 长 宽 高 ) /mm m m mm : 7 20 0 3 700
甘蔗被切稍器断尾, 分蔗搅拢将 交叉倒伏的甘蔗 分开 , 通过割台将甘蔗砍切 , 随着输送装置向上输送 ,
析[8]�但对引进新 型窄行距 切断式甘 蔗收割 机的试 � 经过切段装置时 被切成 23 28cm 长的甘 蔗段 ; 此时 验研究未见报道 � 因此, 本文结合国家甘蔗技术体系 蔗叶被除杂装置抽出吹走 , 切段后的甘蔗落到升运器 实施, 对凯斯 400 0 型 切断式甘 蔗联合 收获机 进行试 验研究� 上, 向上提升输送 , 在挡蔗器的协助下装到运输车上 , 送入糖厂进行压榨 � 主要技术参数 : W : 125 额定功率 /k 0 额定转速 /r�m m 1 : 2 50 理论生产效率 /t�h 1 : 30 25 含杂率 /% : 8
0
引言
了凯斯 400 0 切断式甘蔗联合收获机, 如图 1 所示 �
我国 20 世 纪 70 年代 起就开始了甘 蔗机械化收 [1- 4 ] , 获的艰辛探索和试验 研究 主要以引进 和自主研 发相结合 , 包括整 秆割铺机和剥叶 机, 以 及整秆和切 , 段式联合收割机 目前 还处于起 步阶段[5 7]�引进的 0 0 甘蔗收获机, 凯斯 70 收割行距最窄只能调到 1.2m , 不能适应对种植 1m 行距的甘蔗 收获� 20 10 年, 全国 甘蔗种植面积约为 16 0 万 hm 2 , 多为人畜生产, 90 % 以 上甘蔗种植行 距都是 1m 左右, 影响了 甘蔗机械化的 砍收 �为了加快甘蔗全程机械化的推广, 适应甘蔗窄 20 09 年我国开始逐步引进 凯斯 400 0切 行距的砍收, 断式甘蔗联 合收获机 � 对于 甘蔗机 械化收获 的试验 00 型切 断式甘蔗 联合收割 研究 , 陈超平 等对凯斯 70 机及配套的甘蔗 机械化收 获系统的 性能进 行了试验 测试,并与人工及小型机械化收获系统进行了比较分
甘蔗机收切断式和整秆式两种模式技术比较分析
甘蔗机收切断式和整秆式两种模式技术比较分析一、我国甘蔗机收的产业链条二、甘蔗机收各环节要求和约束条件□莫蕾甘蔗机械化ts Reserved.·17·三、两种模式的关键指标比较表3切断式和整秆式含杂率比较内容切段整秆备注蔗稍取决机手水平及甘蔗高度均匀度理论上相同,实际比切段略高,切段风机可带走一部分左边所述整秆不是自动断尾形式的蔗叶取决收割效率及风机风力略高,蔗叶未切断,蔗叶分离不干净、近稍部分蔗叶剥不完全自动断尾式整秆在剥稍叶时会去除部分甘蔗表泥土砂石高,加大风机风量除泥土砂石时使甘蔗损失更高低,整秆内设剥叶除叶装置,去叶时泥土砂石相应去除泥土砂石因切段挤出糖汁会粘在甘蔗上,切段刀口调整不好和切段越短,粘泥土砂石越多,随甘蔗输送至转运车蔗笋高略低,剥叶/除叶装置将其大部分随蔗叶去除风机会去除部分,但大部分随甘蔗输送至转运车蔗须一般略高可随风机吹出综合整秆收割后表面上存在蔗叶、部分蔗稍及未剥离的蔗叶,但如保证去叶率达90%以上,其含杂率通常都会低于切段式,不含泥和砂石,也对糖厂的进榨不会造成太大的影响表4切断式和整秆式收割效率比较机型收割效率原因备注切段可达较高加大动力,合理设计,理论上可达很高效率不考虑对地块损伤、含杂及其它影响收割的因素整秆1在合适条件下可达较高合理的去除相应的蔗叶就不可能成捆的输送收割速度、甘蔗输送速度、甘蔗长势与剥净率是一对矛盾的对立体整秆2低一根甘蔗易断,10根以上甘蔗就难了采用自动断尾技术综合切段式只要条件满足,其收割速度和收割效率就可以达到很高,其功率可达400HP以上,但整秆式需要剥叶和除叶,收割速度过快,输送的甘蔗过多,就会影响到剥净率,尤其采用自动断尾技术的整秆式,其甘蔗的喂入量要求更少,因此整秆式只能采用中小马力的功率表1整秆式损失率(校准甘蔗)切稍损失机手就高不就低原则切稍蔗农糖厂找各自平衡点扶蔗—输出产生1—3%损失据国外统计数据入土/贴土挽回>5%损失人工收割留根5—10cm综合整秆式如设计合理不堵不断,机收的甘蔗增收与损失总量将和人工的持平,或比人工损失更小表2广西和澳洲机收损失率对蔗农影响比较内容广西澳大利亚备注甘蔗收购价(元)≥500≤300机收价(元)9050澳机收价在45—60元之间如按10%损失率计(元)5030蔗农支出(元)14080在国外高机收率地区,由于甘蔗价低,损失率占比不重,而我国甘蔗价高,损失率占比大。
甘蔗机收切断式和整秆式两种模式技术比较分析

甘蔗机收切断式和整秆式两种模式技术比较分析我国甘蔗联合收获机械有整秆式和切段式两种作业模式。
目前,存量占比情况大概是切段式≥99%,整秆式≤1%。
切段式作业的流程是切割、收集、转运,整秆式流程是收割、堆放、转运。
需要说明的是,割铺机不属于整秆式收割机,其功能仅仅是完成切割环节,不具备联合作业功能,且作业效率低,故不在本文讨论范围之内。
一、我国甘蔗机收的产业链条在讨论之前,这个问题需要先交代清楚。
与其他作物不一样的是,甘蔗机收的参与者较多,涉及到机收公司、蔗农、运输公司、糖厂等各方利益,形成了一个甘蔗机收产业链条,能否兼顾各方参与者的关键指标并平衡链条上的利益,是完成甘蔗机收的基本条件。
各方参与者的指标要求也不尽相同,比较一致的关键指标有作业效率、损失率、破头率、运输效率、含杂率等。
但是,侧重点各有不同,糖厂更关注含杂率、甘蔗品质;蔗农对宿根破头率、损失率、地块损伤和压实有要求;机收公司则关注作业效率、油耗、运营费用、折旧占比等指标;运输公司对装载量有特殊要求。
二、甘蔗机收各环节要求和约束条件(一)收割环节1.入土或贴土收割。
优势:的种植成本。
(二)运输环节对有效装载量有要求。
切段式:甘蔗短,蔗叶少。
整秆式:蔗叶少,甘蔗之间空隙少。
(三)进糖厂环节1.含杂率低。
优势:带走糖分少;能减轻榨糖设备磨损;可降低糖厂负荷,尤其非甘蔗杂质。
约束条件:蔗叶少,收割效率高的机型需建立主风机外的除叶系统;泥土砂石等杂质较少,收割设备需配切断前的除杂装置;要求切稍合适;蔗笋较少。
2.破损率低(甘蔗品质好)。
优势:能降低损失率和糖分损失;可延长收割后甘蔗的存放时间,尤其对整秆式。
约束条件:压入、喂入、砍刀位置适当;各部分的线速度匹配合理,通道内后排输送辊的线速度应逐渐加速,但并不是速度越快越好;与甘蔗接触部分无论结构、材料尽可能用不伤甘蔗的技术,尤其对整秆式更是如此。
需要特别说明的是:虽然甘蔗损伤不是切段式重点关注的指标,但过大损伤会造成较多损失率,并对甘蔗出糖率造成较大影响;甘蔗损伤对整秆式的影响除了和切段式相同外,还影响储存,所以是整秆式较重要的指标之一。
小型甘蔗收获机一种台架机构的建模与仿真分析

件的底盘等部件, 中台架部件是甘蔗收获机 的一个 其 重要部件, 同时也是扶蔗器 、 它 刀盘 、 喂入耙轮的安装
i ee dn aj . vn ent npr dit A A S s — n pn e t oi Hai b e aso e o D M , i d d a g r t n mu
lt g sf a b u c a ia ytm d n mis te w oe ai ot r a o tme h nc ls s n we e y a c , h h l mo e a e n smuae . T e faii t n rcia it f d lh sb e i ltd h e sbly a d pa t bly o i c i
文章编号:0 6 7 0 (0 60 — 0 6 0 10 — 2 52 0 )2 0 7 — 3
M o e n i lt na dA ayi o n f a l a t d l gSmuai n n ls faKido iaP rs i o s T j
o malsaeS g r Ca e Ha v se /JA fa S l c l u a n r etr/ I NG i bn U L — i;
收 获甘 蔗 的 主要工 序 是: 蔗 、 蔗 、 扶 砍 断尾 、 叶 、 剥
收集甘蔗等。 相应小型甘蔗收获机主要部件有: 、 扶蔗
砍蔗、 断尾 、 喂人 / 送 、 叶 、 蔗 以及支 撑 以上 各部 输 剥 集
tikn fa i aeaaye . n ee met d l fh u- hs ido iar n sd A f i l n mo e o ec t tj l it e t
维普资讯
中国农 机化・硼N s G C L U A E H NZ T0 C E EA m U T R LM C A IA 1N
小型甘蔗收割机压蔗横杆的设计与仿真分析
( ) + 一 ‘ _n +
() 3
[ 一 ( 一0 一 } H )]
甘 蔗在 有支 撑切 割 时 , 图 1 C 所 示 。 如 ()
D 点 的挠度 为
。 = 加 " WF l "
b N Ft FN 2 D=面 3 c 3 ) 一面 ( 6一口
() 4
×
F 一 C
{ (—) 6 (一) 一 }( n 6 。] _ 2 。 广西大学研究生教育创新 计划项 目(0 9 0 0 05) 广西制 15 3 9 3 3 ; 造系统与先进制造技术重点实验 室科研项 目( 70 0 8 0 1 0 19 0 _ 2
一
K) 广 西 科 技 攻 关项 目(9 2 0 ; 0 90 2—1 ) 8
为m , :剩余部分质量为 m。甘蔗受到速度为 的刀片 ,
的冲击运动时 , 甘蔗在有无 压蔗横杆支撑 的情 况下受 力 分析 如 图 2和 图 3所 示 。
8 ・ 5
作者简介 :刘智彪 ( 96一) 男 , 18 , 湖南 益 阳人 , 士研究生 , E—m i 硕 ( al )
WF D
[ 一( 日
b +[ 一 ( —b 一 } ) 爿 H )]
F0 3— —EI … 【 lJ
由式 ( )~式 ( ) 知 , 蔗 在 有 支 撑 切 割 时 , 4 6可 甘 切
割点 D、 支撑 点 C和甘 蔗尾 部 B点 的挠 度都 有所 减小 。
{ (
+6 ( [ -6
) 一
() 5
B点 的挠 度 为
: F - WF B 1 -
N 丽 B= } 一
{
( 一n + )+ {
() 6
三种形状刀片的甘蔗切割器运动学仿真分析
(5/、 数量(片、 盘 倾角 6 , 甘蔗 0n ) .1 刀片 4 ) 前 度( ) s 刀 。切割 破头率 .6 , 为48 达到实 作所 要的 4% 际工 需 理想 j
btrh ̄t pzia baeadrcag l l ei ut geet n eot zdsutr p a ees ee a aeodl l n tnua ba nctn fc, dt pi e t cue a m tr t t lr d e r d i f a h mi r r
creo.nl ds ctr eebi.n e yopyn ie aiepr et muao ehd cr— u ̄)  ̄ ge i ut r ul dt nb l gknm t xei nas linm to , o f i c ew t A h p i c m li t n prt e lls apoesdo ae t c rad aa eesftebae,n erlinh ew e aai lyiWS rcse ns p r t e n p m tro h l sadt aosi bten v aa s h su u r d h et p
【 摘 要】 针对 目 前甘蔗收获机械 中存在切割甘蔗产生的破头率较高、 损失率较大等主要 问题 , 以 破 头率为试 验指标 , 以甘 蔗切 割 器上 关键 零件 刀片为研 究对 象 , 建立三种 形状 ( 形 、 形 、 矩 梯 弯形 ) 片 刀
参 的单圆 切割器 模型, 运动学 试 研究 数 盘 仿真 采用 仿真 验的 方法, 切 及刀 的形 结 工 对 割器 片 状 构、 作参 {
甘蔗榨汁机械:切蔗机的数字化设计和仿真分析

甘蔗榨汁机械:切蔗机的数字化设计和仿真分析甘蔗是一种具有丰富营养和广泛用途的经济作物,在许多国家都有广泛种植。
为了提高甘蔗榨汁的效率和质量,切蔗机的数字化设计和仿真分析变得越来越重要。
本文将详细介绍切蔗机的数字化设计和仿真分析的相关内容。
首先,数字化设计是指通过计算机辅助设计软件对切蔗机进行三维建模和设计。
这种设计方法相比传统的手工设计方法,具有更高的效率和准确性。
数字化设计可以通过对切蔗机各个零部件进行三维建模,并进行装配和运动仿真,来模拟真实的工作状态。
通过数字化设计,可以在计算机上对切蔗机进行全面的优化设计,使其具有更好的性能和可靠性。
在进行数字化设计时,需要考虑的因素有很多。
首先是切蔗机的结构设计,包括切蔗刀的形状和数量、传动装置的设计等。
这些因素直接影响到切蔗机的工作效率和切割质量。
其次是切蔗机的运动学分析,通过仿真模拟切蔗机在工作过程中各个零部件的运动轨迹和相互作用,可以发现并解决设计中存在的问题。
此外,还需要考虑切蔗机的强度和刚度等结构参数,以确保其在工作时不会产生过大的变形和振动。
在进行数字化设计时,需要选择合适的计算机辅助设计软件。
目前市面上有很多优秀的设计软件,如SolidWorks、AutoCAD等。
这些软件提供了强大的三维建模和仿真分析功能,并且具有友好的用户界面,方便设计师进行操作和修改。
设计师可以根据实际需要选择适合的软件,并进行相关的培训和学习,以充分发挥软件的功能和优势。
在数字化设计的基础上,还可以进行仿真分析。
仿真分析是指通过计算机模拟实际工作状态,对切蔗机的性能进行评估和优化。
通过仿真分析,可以分析切蔗机在不同工况下的工作效果,寻找潜在的问题,并提出相应的改进措施。
仿真分析可以在设计的早期阶段就发现问题,减少后期修改和调整的成本和工作量。
在进行仿真分析时,需要建立切蔗机的运动学和动力学模型。
运动学模型用于描述切蔗机各个零部件的运动轨迹和相对运动关系,动力学模型用于描述切蔗机在运动过程中所受到的力和力矩。
新型甘蔗收割装置的仿真分析与试验研究

切 割质 量 的影 响 。结 果 表 明 , 新装 置 设 计 能 令 小 型 甘 蔗 联 合 收 获 机 切 割 机 构 的 刚 度 提 高 1 . O , 蔗 断 面 该 5 3% 甘
切 割质 量 得到 明显提 高 。 关 键词 :甘蔗 切 割机 构 ;切割 刚度 ;支撑 杆 ;仿真 分析 中图分类号 :s 2 . 3 255 文献标识码 :A 文章编号 :1 0 1 8 2 1 ) 2- 12— 4 0 3— 8 X(0 1 0 0 0 0
有 限公 司 ,柳 州 5 5 0 4 0 7;4 广西 特 种设 备 监督 检 查 院 贵 港 分 院 ,贵港 . 摘
570 3 1 0)
要 :切 割 机构 的 刚度 对甘 蔗 破 头率 有 着显 著 的影 响 , 此要 解 决破 头 率高 的问题 , 必 须令 切 割机 构 的设 计 因 就
() a () b () C ( ) d
图 1 甘蔗切割过程受力 简图
Fi . F r e d a r m fc t n u a c n g1 oc iga o ut g sg ra e i
西制造 系统与 先进制 造技 术重 点 试验 室项 目( 7 0 0 8 0 19 0 — 0 21 K) ;广 西 研 究 生 教 育 创 新 计 划 资 助 项 目
() 1
tn o g 2 7 1 3 C r。 edn5 2 @ 6 .O n
21 0 1年 2月
农 机 化 研 究
第 2期
新 型 甘 蔗 收 割 装 置 的 仿 真 分 析 与 试 验 研 究
赖 晓 ,李 尚平 ,秦 志文 ,朱 天
(. 1 广西 大 学 轻工 与食 品工 程学 院 ,南 宁 500 3 0 4;2 钦 州学 院 ,广 西 钦 州 . 550 3 0 0;3 上 汽通 用 五 菱股 份 .
CAXASolid环境下切段式甘蔗联合收割机升运器的设计方法
三、甘蔗联合收割机升运器部件的设计过程
1 运 器主 体 框 架 结 构 的 设 计 . 升
首先 ,根据切段 式甘 蔗联合收割机升运器支撑座、机体尾
因此 ,进行切段式甘蔗联合收割机设计的时候 ,需要同时 部和升运器集 蔗斗 之间的相对位置关系 ,甘 蔗联合收 割机 与运 输斗车之 间配合 工作 的距 离及 高度关系 ,以及初步 的力学模型 考 虑其 与运输斗车之间的工作 配合关系。 分 析 ,确定升运器 的高度 、倾 角以及 升运器主体框架结构 ,并
数 字 化 设 计
本文介绍 TC X S l 的特点和三维实体建模的常用过程 ,并 以实例 介绍了在 C X S ¨ 环境下设计甘蔗联合 A A oi d A A od 收割机升运器的方 法。
C X S l 环 境 下切 段 式 甘蔗 联 合 A A oi d 收 割机 升 运器 的设 计 方 法
一
体 ,由于该机 机型较 为庞 大 、结构 相对复 杂 ,采用 了全液 实现性等 方面造成一定的困难 ,有时会导致在设计 后期进行 比
压 驱 动 ,使 用 采 用 传 统 的 二 维 设 计 手 段 进 行 设 计 时 ,其 设 计 较 大的改动 ,甚至有时候对于其 中一些零部件 需要进 行重新设
自底向上设计 是一种比较传统的方法 ,是根据系统功能要 架结构草 图。由于升 运器左右两侧 的主体框架结构对称 ,在此 所示。 求 的划分 ,从具体 的零部件开始设计 ,然后凭借设计者 的技 巧 仅给 出其 中一侧的草图。其草 图如 图1 和经验 ,通过对 各个 零部件进行相互连接 、进行修 改 ,再进 一 其次 ,根 据确定 下来 的主体框 架结 构 ,可 以进 行初步 的 A A o 1软件 的创新设计模式下 ,配合前 步扩大 ,最终构成 整个系统。因为在前期对各个零部件 单独进 主体框架建模 。在C X S 1 d
甘蔗收获机切割系统动力学分析及仿真

本 课题 组将 研制 适 于广 西丘 陵地 区特 点 的小 型甘 蔗 收获 机械 作 为 出发 点 ,在 探 索切 割 系 统 振 动 特 性 与 甘 蔗破 头率 方 面做 了大 量 的研 究 工作 。切 割 系 统 的结 构 动态 特性 影 响宿 根破 头率 的规 律 已在课 题 组 前期 研 制 的物 理样 机 上 得 到 大量 验 证 ,切 割 系统 的动 态 特 性 和 其结 构参 数 、工 作 参 数 和 受 到 的激 励 源 冲击 载 荷 有 关 ,在 工况 下受 到 的激励 主要 有 发动 机激 振 力 、甘 蔗地 路 谱激 励 和砍 蔗切 割力 。
本 文利 用动 力 学 分析 理 论 和虚 拟 样 机 技 术 ,构 建 了动力 学 简化模 型并 通 过 多 体 动 力学 仿 真 进 行 求 解 , 探 究切 割 系统 的 安装 位 置 、提 升 方 式 等结 构参 数对 动 态 特 性 的影 响 。
1 切 割 系统 动 态 特 性 和 破 头 率 的关 系
从 图 1可 知 ,刀盘振 幅越 大 ,切 割 损失 综 合评 分 越 高 。振 幅 0.46lmm 对应 的切 割质 量损 失评分 为4.71, 振 幅 1.054mm 对 应 的切 割 质 量 损 失 评 分 为 7.21,说 明切 割器 振 幅增 加 近一 倍 ,甘 蔗切 割 质 量 损 失 提 高 近 一 半 。因此提 高切 割 系 统 动 态 特 性 ,降 低 振 幅 对 于 降
设计与仿真试验分析极差根据刀盘转...
,。
西大摩唾‘±呻套文小型甘蔗帕q竞机颤’耳瓤构创囊敞计与仿真试骀分析整个蔗尾收拢机构,由左右两带退稍板的机构成一定角度对称排布组成,整个机构与后挡板问通过螺栓连接。
两退稍板在蔗尾收拢机构的靠后部分,并且与水平方向成一定的角度,外侧向下倾斜,其延伸宽度根据种植垄宽以利于被断下的尾部顺利滑落到垄沟内为宜;扶蔗导向杆上有止位板,扶蔗导向杆的前端带有一定弧度,从而使收拢动作的初期比较颁畅。
蔗尾收拢机构后方是后挡板机构,并通过平行四连杆机构实现整个切稍装置在升降过程中始终保持水平状态;平行四连杆结构问通过销连接,采用可向侧面折叠的方式,折叠连接处如图2-6所示;连杆与后挡板之间的连接位置根据所选择的刀盘数的不同由整体重心坐标来确定。
2.4.2断尾机构的工作原理图2-6销连接处模型图Fig.2—6Theiodelofthepinconnection当收割机前进时,甘蔗通过前端带弧度的扶蔗尾导向杆将目标甘蔗顺畅的扶起,并在中间分流杆的辅助下和断尾刀的滑切拨动下将甘蔗流畅的分到两侧,并将尾部砍断。
砍刀位于退稍板的上方,这样,砍断的尾部在初始速度的作用下向侧后方运动,通过退稍板滑落到垄沟。
从而有利于对蔗尾的收集与再利用,也防止了断下的蔗尾落到垄上,被进一步传送到剥叶机构。
扶蔗导向杆上的止位板用来限制甘蔗被向后拨动的最大位移,并使断尾刀在该位置将蔗尾强行砍下.整个装置是通过液压缸驱动平行四连杆机构来实现升降,并使其在工作时始终保持水平状态,该机构结构简单,操作方便。
为了便于运输,减少运输占用的空间平行四连杆机构采用可折叠式,整个蔗尾收拢机构与后挡板之间用螺栓连接,以便在运输途中可将其拆下.拆分前后的原始组装模型和爆炸模型,如图2-7、2-8所示:17小型甘蘑收获机断置机构创新设计与仿真试验分析图2—7原始装配模型Fig.2—7The_odelofinitialassembly因2-8部分零件爆炸模型Fig.2-8TheexplodedmodelofpartpartslS广西大国明五j啼e文小型甘蘑坩滚机昕思棚湘创新设计与仿真试聪吩析(3-4)蚝=磁=&=TE/式中I为截面惯性矩。
甘蔗联合收割机机液速度控制系统的设计与仿真

甘蔗联合收割机机液速度控制系统的设计与仿真陈远玲;孙英杰;梁浩昌;李文全;魏威;龙禹平【摘要】甘蔗联合收割机在收割作业过程中,各作业机构间速度的合理匹配,对砍蔗质量、除杂效果以及蔗流堵塞等均有重要影响.基于联合收割机速度匹配的要求,提出了一种基于机械式速度跟踪器的机液速度反馈阀控系统,实现一个作业系统对另外一个作业系统的转速跟踪.运用AMESim与ADAMS软件对该系统进行联合仿真,结果表明:该系统适用于甘蔗联合收割机各子系统间转速的协调联动控制.转速跟踪误差与节流阀的流量增益有关,采用梯形槽节流阀口,速度跟踪误差小于5.24%,可适用于该系统,采用U形槽、三角形槽、L形槽形状的节流阀口,跟踪误差大,不适用于该系统.【期刊名称】《液压与气动》【年(卷),期】2018(000)008【总页数】5页(P7-11)【关键词】甘蔗联合收割机;协调联动;机械式速度跟踪器;仿真【作者】陈远玲;孙英杰;梁浩昌;李文全;魏威;龙禹平【作者单位】广西大学机械工程学院,广西南宁530004;广西大学机械工程学院,广西南宁530004;广西大学机械工程学院,广西南宁530004;广西大学机械工程学院,广西南宁530004;广西大学机械工程学院,广西南宁530004;广西大学机械工程学院,广西南宁530004【正文语种】中文【中图分类】TH137引言甘蔗联合收割机是甘蔗机械化生产链中最关键的设备,对减轻农民劳动强度、提高甘蔗收割效率、降低蔗糖成本有重要作用。
然而,我国自主设计研发的甘蔗联合收割机在收割质量等方面与国外机器相比都还有较大差距,动力传动与控制系统的设计需要进一步改进和提高[1]。
甘蔗联合收割机的收割质量评价指标主要有破头率、含杂率、损失率等。
研究表明,甘蔗联合收割机的行走速度与切割器的刀盘转速、喂入输送辊的转速之间有速比约束,各子系统之间需要协调控制。
该功能不但会影响到甘蔗收割质量的含杂率、损失率、破头率等指标,而且会影响到甘蔗物流通道的堵塞,进而影响到设备工作的可靠性[2-3]。
甘蔗收获机切割器的结构动力学仿真分析及试验研究
广 西大 学 学 报 ( 自然 科 学 版 )
J u n l fGu n xi ie st ( tS iEd o r a a g o Unv r i Na c ) y
Vd . 3。 . 1 3 No 3
s p .. 0 8 e t 20
蔗 联 合 收 获 机 切 割 器 提 供 了 依据 .
关 键词 : 切割器 ; 轴承 ; 刚性 ; 仿真分析 中图分类号 : HI3 2 T 1 r ld na i s a a y i nd e pe i e a nv s i a i n o t uc u a y m c n l s s a x r m nt li e tg to f
f rhg i i e i no u tn e ieo u a c n o o ih rgd d sg fc tig d vc fs g ra ec mb n a v s e . ieh r e t r
Ke r s c ti g d v c s a tb a i g; tfn s ; i u a i n y wo d : u tn e ie; h f e rn s i e s sm l t f o
s g r a r e t r c ti e i e u a c ne ha v s e u tng d v c
LISha — i , ng p ng LA I X i o , a 。 CH EN G Zhiq n , - i g。 DA IX io b a a — io
wh n i c t u a c n , n l z s e p rme t lr s ls o u a c n u tn u l y, e iis e t u s s g r a e a ay e x e i n a e u t f s g r a e c t i g q a i v rfe t t e r l b l y o y a c a a y i , n i a l r n s u t o f p o e r a g n h f h e i i t fd n mi n l ss a d f ly b i g p a me h d o r p r a r n i g s a t a i n b a i g ih c n e h n e t e c t i g s i n s f t e c ti g d v c . t p o i e e e e c e rn s wh c a n a c h u tn tf e s o h u tn e ie I r v d s r f r n e f
甘蔗收获机的振动与稳定性分析
甘蔗收获机的振动与稳定性分析甘蔗是一种重要的农作物,全球范围内都有大量的甘蔗种植。
为了提高甘蔗的产量和生产效率,人们发明了甘蔗收获机。
然而,甘蔗收获机的振动问题一直存在,对机械的稳定性和操作者的工作环境都会产生影响。
因此,对甘蔗收获机的振动与稳定性进行分析与研究,对于提高机械的性能和操作的安全性具有重要意义。
首先,我们需要了解甘蔗收获机的工作原理和结构。
甘蔗收获机主要由发动机、传动装置、刀具系统和输送系统等部分组成。
其工作过程是通过发动机驱动传动装置带动刀具旋转,将甘蔗切割下来,然后通过输送系统将切割下来的甘蔗送到容器中。
在整个工作过程中,甘蔗收获机会受到地面的不平整、切割过程的冲击以及机械结构的影响,进而产生振动。
其次,我们需要分析甘蔗收获机振动的原因。
甘蔗收获机振动主要来源于不平衡力、动载荷和结构刚度等因素。
不平衡力是指甘蔗收获机旋转部件的质量不均匀分布,产生了离心力,导致机器产生振动。
动载荷是指在甘蔗切割过程中,机械结构和刀具受到来自甘蔗的冲击力,使得整个机械系统产生振动。
而结构刚度是指甘蔗收获机的结构对振动的阻尼能力,刚度越大,阻尼能力越强,振动越小。
然后,我们需要进行甘蔗收获机振动与稳定性的分析和评价。
首先可以通过实验测量甘蔗收获机在不同工况下的振动程度,采集振动信号,然后进行数据处理和分析。
利用频谱分析等方法,可以得到振动的频率特性和振幅大小。
通过对比振动数据与国际标准的要求,可以评估该机器的振动水平是否符合规定。
同时,还可以利用有限元方法对甘蔗收获机的结构进行模拟和仿真,分析不同部件的应力和振动情况。
这样可以预测和检测可能存在的振动问题,为改进和优化设计提供依据。
最后,为了提高甘蔗收获机的振动和稳定性,我们可以采取一些措施。
首先是优化结构设计,增加机械的刚度,提高阻尼能力,减小振动的产生。
例如可以采用新型材料,增加机械部件的强度和刚度,提高机器的耐用性和稳定性。
其次是改进刀具系统,减小切割过程中的冲击力和振动。
4GZ-120甘蔗联合收割机动力分配箱的仿真优化的开题报告
4GZ-120甘蔗联合收割机动力分配箱的仿真优化的开题报
告
题目:4GZ-120甘蔗联合收割机动力分配箱的仿真优化
研究背景和意义:
甘蔗联合收割机是甘蔗种植业生产的重要设备,在甘蔗生产中起着至关重要的作用。
动力分配箱是甘蔗联合收割机的核心部件之一,用于调配发动机的动力和扭矩,
以确保机器在不同的作业条件下达到最佳的作业性能。
因此,优化动力分配箱的设计
和调试,可以提高甘蔗联合收割机的作业效率和经济效益,降低能源消耗和环境污染。
研究内容和方法:
本研究将使用先进的仿真技术,对4GZ-120甘蔗联合收割机的动力分配箱进行
建模和仿真。
首先,将对动力分配箱的结构和传动机理进行研究,建立数学模型。
然后,利用仿真软件对模型进行仿真计算,优化动力分配箱的设计参数,包括齿轮传动比、液力变矩器的调节参数等。
最后,将通过实验验证和分析来验证仿真结果,检验
优化方法的可靠性和有效性。
研究成果和意义:
通过本研究,提出的优化方案有望实现甘蔗联合收割机动力分配箱设计的最佳化,提高其能源利用效率和作业性能。
这将有助于促进我国甘蔗种植业的发展,提高生产
效率和经济效益。
此外,本研究还将探索先进的仿真优化技术在机械工程领域的应用,为未来机械设计和优化提供参考和借鉴。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
切段式甘蔗联合收割机机架运动仿真分析作者:鲁华曾伯胜莫建霖
来源:《CAD/CAM与制造业信息化》2013年第05期
针对甘蔗机械化收获中宿根破头率这一难题,本文结合企业的研发项目,以SolidWorks Motion 为平台,根据主要工作过程设定仿真流程,在三个行程位置上进行Motion 分析,并对仿真结果进行分析,对设计进行修正。
一、引言
甘蔗含糖一般为14%左右,是制糖工业主要原料。
近年来,由于甘蔗人工收获成本大幅上涨,生产成本不断增高,研究探讨甘蔗收获机械化技术对于我国甘蔗行业发展有着极其重要的意义。
甘蔗作为一种多年生草本植物,如果宿根受到损伤或者破坏严重,则会大幅减少来年甘蔗宿根的发芽率。
因此,机械化收获对甘蔗宿根破坏的情况对于来年甘蔗的产量影响很大,甘蔗机械化收获中所面临的一个难题即是如何降低甘蔗的宿根破头率。
在多次甘蔗机械收获试验中
发现,当收割机切割器进行入土切割——即切割器刀片以一定的线速度切入地面以下20~50m m对甘蔗进行切割的时候,对甘蔗宿根的损伤和破坏(主要是砍裂蔗头、损坏蔗芽)最小,且入土切割以后,会促使甘蔗宿根低位芽萌发,从而使宿根蔗粗壮、不易倒伏,提高甘蔗产量。
广西农机院近年研发的4GZQ180型切段式甘蔗联合收割机,其切割器固定在机架上,依靠左右前轮支撑油缸的伸缩来调整机架相对地面的高度,从而调整切割器刀盘相对地面的位置。
本文以SolidWorks软件对切段式甘蔗联合收割机进行建模,运用SolidWorks Motion模块对其切割器刀盘工作位置及相关零部件运动进行仿真分析,通过分析其仿真结果,对设计进行修正。
二、建立机架主体及切割器实体模型
在SolidWorks中采用自底向上的设计方法对收割机的主体机架结构和切割器进行三维实体建模,并通过相应的装配关系将机架主体结构、支撑油缸、转向油缸以及切割器安装在一起,如图1所示。
三、仿真分析
1.仿真目的
下面以前轮支撑油缸升降的三个行程位置(最长、中位、最短)结合转向油缸的伸缩进行Motion分析仿真,主要目的是获取切割器刀盘的刀尖运动路径、相对地面高度,检查相应零部件干涉情况。
2.仿真模型简化
由于机架主体结构中上前轮、后轮都是左右结构对称,因此进行Motion仿真分析之前,先将模型简化,将与Motion仿真分析无关的部件以及标准件省略,并将机架右半侧进行压缩,对左半侧进行分析。
3.仿真
在SolidWorks中打开机架主体与切割器的装配体文件,并添加一个固定的ground零件作为地面,其余部件作为运动部件。
三维模型设置好后,在装配体环境下直接启动SolidWorks Motion模块进入仿真环境。
SolidWorks Motion模块可以自动识别SolidWorks装配体中的约束副。
支撑油缸和转向油缸与机架主体之间的约束副主要是旋转副(同心)和移动副(距离),切割器与机架主体之间的约束副是由同心和重合构成的固定约束。
切割器刀盘的刀尖运动路径和相对地面高度取决于支撑
油缸的行程位置,支撑油缸的行程位置和转向油缸的长度确定了前轮的转角以及一些相应零部件的干涉情况。
支撑油缸和转向油缸的运动参数如表1。
根据设计,支撑油缸的动作优先于转向油缸的动作,因此,设置如下仿真动作流程:
(1)支撑油缸初始位置为最小安装距离,转向油缸初始位置为行程中位;
(2)支撑油缸伸长至最大行程S T E P(T i m e,0,0,5,-340);
(3)支撑油缸缩短至最小安装距离S T E P(T i m e,5,0,10,340);
(4)转向油缸伸长至最大行程ST E P(T i m e,10,0,12.5,120);
(5)转向油缸缩短至最小安装距离S T E P(T i m e,12.5,0,17.5,-240);
(6)转向油缸伸长至行程中位S T E P(T i m e,17.5,0,20,120);
(7)支撑油缸伸长至行程中位S T E P(T i m e,20,0,22.5,-170);
(8)转向油缸伸长至最大行程STEP(Time,22.5,0,25,120);
(9)转向油缸缩短至最小安装距离STEP(Time,25,0,30,-240);
(10)转向油缸伸长至行程中位STEP(Time,30,0,32.5,120);
(11)支撑油缸伸长至最大行程S T E P(T i m e,32.5,0,35,-170);
(12)转向油缸伸长至最大行程STEP(Time,35,0,37.5,120);
(13)转向油缸缩短至最小安装距离S T E P(Time,37.5,0,42.5,-240)。
根据以上设定,在支撑油缸上添加线性马达,运动表达式为:
STEP(Time,0,0,5,-340)+S T E P(T ime,5,0,10,340)+STEP(Time,20,0,22.5,-170)+STEP(Time,32.5,0,35,-170)
在转向油缸上添加线性马达,运动表达式为:
STEP(Time,10,0,12.5,120)+STEP(Time,12.5,0,17.5,-240)+S T E P(T i m e,17.5,0,20,120)+STEP(Time,22.5,0,25,120)+STEP(T im e,25,0,30,-240)+S T E P(T im e,30,0,32.5,120)+STEP(Time,35,0,37.5,120)+STEP (Time,37.5,0,42.5,-240)
在Motion中设定仿真时间为42.5s,运动算例属性中使用WSTIFF积分类型,其余Motion 分析设定为默认值进行仿真计算。
在仿真结果中,图解切割器刀盘的刀尖运动路径如图2所示。
图2所示刀尖的运动路径明显未到达地面,即切割器刀盘未能入土切割。
切割器刀盘的刀尖相对地面高度如图3所示。
从图3中可知,刀尖在最低位置离地面仍有约52mm的高度。
支撑油缸转角(即前轮轴心线转角)如图4所示。
支撑油缸行程位置如图5所示。
转向油缸长度如图6所示。
通过Motion模块的检查干涉功能进行分析,发现前轮与扶倒器支架加强板之间、转向油缸球头与支撑油缸转向耳和下吊耳之间都发生不同程度的干涉。
由图7 可见,前轮与扶倒器支架加强板之间在11.635~13.674s时发生干涉,且在12.514s 时干涉体积最大,为11 902.426mm3,如图8所示。
转向油缸球头与支撑油缸转向耳在2.639~7.357s、23.309~27.107s、29.186~30.586s、32.944~41.822s时发生干涉。
最大干涉体积如图9所示。
表2是以上各时间段产生最大干涉体积的时间和最大干涉体积。
转向油缸球头与支撑油缸下吊耳之间在2.879~7.157s、28.427~31.185s、33.264~41.822s 时发生干涉。
最大干涉体积如图10所示。
表3是以上各时间段产生最大干涉体积的时间和最大干涉体积。
4.结果分析
由图2和图3可知,刀尖离地最大高度为346mm,最小离地高度为52m m,即无论支撑油缸位于哪个行程位置,都未能达到切割器刀片以一定的线速度切入地面以下20~50m m的
设计目标。
前轮与扶倒器支架加强板之间,转向油缸球头与支撑油缸转向耳和下吊耳之间存在干涉。
结合支撑油缸转角、支撑油缸行程位置和转向油缸长度进行分析可知:前轮与扶倒器支架加强
板之间的干涉发生在(11.635~13.674s)支撑油缸位于最短行程位置附近,转向油缸长度从806.8125m m伸长至840mm,然后缩回至806.5416mm。
转向油缸球头与支撑油缸转向耳之间的干涉发生在如表4所示的时间段,支撑油缸行程位置和转角、转向油缸长度关系如下。
转向油缸球头与支撑油缸下吊耳之间的干涉发生在如表5所示的时间段,支撑油缸行程位置和转角、转向油缸长度关系如下。
由表4和表5分析可知,只要当支撑油缸行程位置超过170m m,支撑油缸转向耳和下吊耳都有可能与转向油缸球头发生干涉。
结合图4、图5和图6分析上述问题,其主要产生原因有两点:一是支撑油缸行程太长;二是支撑油缸上下铰接点在机架前侧板上的相对位置过高。
根据以上仿真分析的结果,对原有的设计进行了修改,改进了机架前侧板和扶倒器支架加强板的外形尺寸,将扶倒器支架加强板在发生干涉处切出一圆弧边以避让前轮,将支撑油缸转向耳和下吊耳结构改为如图11所示的转向耳和上吊耳结构,支撑油缸的上下铰接点位置向上移动,修正支撑油缸的最大行程为320mm。
此时,通过Motion仿真可知切割刀盘的刀尖路径和刀尖相对地面高度,如图12所示。
切割刀盘的刀尖可入土切割的最大深度达到47m m。
通过Motion模块的检查干涉功能进行分析可知,前轮与扶倒器支架加强板之间、转向油缸球头与支撑油缸转向耳和下吊耳之间在整个设定的运动过程中都不再存在干涉情况。
至此,完成了对整个机架主体结构以及相应油缸的修正,达到了设计目标。
四、结语
本文运用SolidWorks Motion模块对机架主体结构和切割器切割刀盘刀尖位置进行了仿真分析,以结果为依据对设计进行修正,并验证修正以后的设计已达到设计目标。
在以SolidWorks为平台在计算机上用虚拟样机来模拟机械系统的运动,很大程度缩短了研发周期,降低了研制费用,进而达到了改进设计、节约成本和时间的目的。