隐马尔科夫
隐马尔可夫模型原理
隐马尔可夫模型原理
隐马尔可夫模型(Hidden Markov Model, HMM)是一种用来
描述状态序列的概率模型。
它基于马尔可夫链的理论,假设系统的状态是一个没有直接观察到的随机过程,但可以通过观察到的结果来推断。
HMM的原理可以分为三个关键要素:状态集合、转移概率矩
阵和观测概率矩阵。
1. 状态集合:HMM中的状态是不能直接观测到的,但可以从
观测序列中推断出来。
状态集合可以用S={s1, s2, ..., sn}表示,其中si表示第i个状态。
2. 转移概率矩阵:转移概率矩阵A表示在一个时间步从状态
si转移到状态sj的概率。
可以表示为A={aij},其中aij表示从状态si到状态sj的转移概率。
3. 观测概率矩阵:观测概率矩阵B表示在一个时间步观测到
某个输出的概率。
可以表示为B={bj(o)},其中bj(o)表示在状
态sj下观测到输出o的概率。
通过这些要素,HMM可以用来解决三类问题:
1. 评估问题:给定模型参数和观测序列,计算观测序列出现的概率。
可以使用前向算法或后向算法解决。
2. 解码问题:给定模型参数和观测序列,寻找最可能的状态序
列。
可以使用维特比算法解决。
3. 学习问题:给定观测序列,学习模型的参数。
可以使用Baum-Welch算法进行无监督学习,或使用监督学习进行有标注数据的学习。
总之,HMM是一种可以用来描述随机过程的模型,可以用于许多序列预测和模式识别问题中。
它的简洁性和可解释性使其成为机器学习领域中重要的工具之一。
隐马尔科夫模型(原理图解)

• 下时期状态只取决于当前时期状态和转移概率 P ( q t S j|q t 1 S i , q t 2 S k ,) P ( q t S j|q t 1 S i )
qt-1
t-1时 刻
3
qt
t时刻
q1 q2 q3 … qt-1
T=1 T=2 T=3
t-1时 刻
qt
t 时刻
S1
隐
藏
S2
)
aa2102 S2
S1
a11 S1 a12 2 ( 2 )
S2
a21
S1
S2
a22 aa0233
1(3) S3
S2
a22 a23
2 (3) S3
S2
SaN0a5aN014aaNNN2
1(4 S4
)
S3
a32 2 ( 4 ) a33 S4
SN
1(5)
O1
S5 O2
2 (5) S5 O3
3 (1 ) t=T-
S1
a11 a12
t=3
t=4
t=5
SS11
a11 a12
SS11
a11 a12
a21
SS22 a22
S2 a22
S2 a22
S2 a22
SS22
a23
a23
a23
a23
a31 a32
a32
a32
a32
S3 a33
SS33 a33
S3
a33
S3 a33
S3
I-隐藏状态
b2(Q3)
Q2
…
…
…
…
…
QM
QM
QM
…
QM
隐马尔可夫模型的基本用法

隐马尔可夫模型的基本用法隐马尔可夫模型(HiddenMarkovModel,HMM)是一种用于描述随机过程的概率模型,它在自然语言处理、语音识别、生物信息学、金融分析等领域得到了广泛应用。
本文将介绍隐马尔可夫模型的基本概念、数学表达、参数估计、解码算法等内容,希望对读者理解和应用该模型有所帮助。
一、隐马尔可夫模型的基本概念隐马尔可夫模型是一个二元组(Q, O, A, B, π),其中:Q = {q1, q2, …, qN}是状态集合,表示模型中可能出现的所有状态;O = {o1, o2, …, oT}是观测集合,表示模型中可能出现的所有观测;A = [aij]是状态转移矩阵,其中aij表示从状态i转移到状态j的概率;B = [bj(k)]是观测概率矩阵,其中bj(k)表示在状态j下观测到k的概率;π = [πi]是初始状态概率向量,其中πi表示模型开始时处于状态i的概率。
隐马尔可夫模型的基本假设是:每个时刻系统处于某一状态,但是我们无法观测到该状态,只能观测到该状态下产生的某个观测。
因此,我们称该状态为隐状态,称观测为可观测状态。
隐马尔可夫模型的任务就是根据观测序列推断出最有可能的隐状态序列。
二、隐马尔可夫模型的数学表达隐马尔可夫模型的数学表达可以用贝叶斯公式表示:P(O|λ) = ∑Q P(O|Q, λ)P(Q|λ)其中,O表示观测序列,Q表示隐状态序列,λ表示模型参数。
P(O|Q, λ)表示在给定隐状态序列Q和模型参数λ的条件下,观测序列O出现的概率;P(Q|λ)表示在给定模型参数λ的条件下,隐状态序列Q出现的概率。
P(O|λ)表示在给定模型参数λ的条件下,观测序列O出现的概率。
根据贝叶斯公式,我们可以得到隐状态序列的后验概率:P(Q|O,λ) = P(O|Q,λ)P(Q|λ)/P(O|λ)其中,P(O|Q,λ)和P(Q|λ)可以通过模型参数计算,P(O|λ)可以通过前向算法或后向算法计算。
隐马尔可夫过程
隐马尔可夫过程1. 引言隐马尔可夫过程(Hidden Markov Model, HMM)是一种用于建模时序数据的概率图模型。
它在自然语言处理、语音识别、生物信息学等领域得到广泛应用。
隐马尔可夫过程以两个基本假设为前提:1)当前状态只与前一个状态有关;2)当前观察结果只与当前状态有关。
本文将介绍隐马尔可夫过程的基本概念、数学模型、算法推导以及应用案例。
2. 隐马尔可夫过程的基本概念隐马尔可夫过程由状态序列和观察序列两部分组成。
状态序列表示系统内部的状态演化过程,观察序列表示在各个状态下的可见观察结果。
隐马尔可夫过程包括以下几个基本概念:2.1 隐藏状态隐藏状态是指系统内部的未知状态,对外不可见。
隐马尔可夫过程假设隐藏状态满足马尔可夫性质,即当前状态只与前一个状态有关。
常见的例子包括天气的状态(晴、阴、雨)等。
2.2 观察结果观察结果是可以观测到的外部表现,反映了隐藏状态的一部分信息。
观察结果与隐藏状态之间存在关联关系,但观察结果并不能完全确定隐藏状态。
在天气的例子中,观察结果可以是人们对天空的直接观察,如晴朗的天空、阴沉的天空等。
2.3 转移概率转移概率是指在给定隐藏状态的条件下,从一个隐藏状态转移到另一个隐藏状态的概率。
转移概率表示了隐藏状态之间的演化关系。
在天气的例子中,转移概率可以表示为从晴天到阴天、从阴天到雨天等的概率。
2.4 发射概率发射概率是指在给定隐藏状态的条件下,产生某个观察结果的概率。
发射概率表示了隐藏状态与观察结果之间的关联关系。
在天气的例子中,发射概率可以表示为在不同天气状态下,观察到某种天空情况的概率。
3. 隐马尔可夫过程的数学模型隐马尔可夫过程可以用数学模型来描述。
其数学模型包括隐藏状态、观察结果、转移概率和发射概率四个要素。
3.1 隐藏状态集合隐藏状态集合表示所有可能的隐藏状态,用S表示。
在天气的例子中,S可以表示为{晴天,阴天,雨天}。
3.2 观察结果集合观察结果集合表示所有可能的观察结果,用O表示。
《隐马尔可夫模型》课件

隐马尔可夫模型在许多领域都有应用,如语音识 别、自然语言处理、生物信息学和金融预测等。
隐马尔可夫模型的应用领域
01
语音识别
用于将语音转换为文本,或识别说 话人的意图。
生物信息学
用于分析基因序列、蛋白质序列和 代谢物序列等。
03 隐马尔可夫模型的建立
观察概率矩阵的确定
总结词
观察概率矩阵描述了在给定状态下,观察到不同状态的概率 分布。
详细描述
观察概率矩阵是隐马尔可夫模型中的重要组成部分,它表示 了在给定状态下,观察到不同状态的概率分布。例如,在语 音识别中,观察概率矩阵可以表示在特定语音状态下发出不 同音素的概率。
状态转移概率矩阵的确定
VS
原理
通过动态规划找到最大概率的路径,该路 径对应于最可能的隐藏状态序列。
05 隐马尔可夫模型的优化与 改进
特征选择与模型参数优化
要点一
特征选择
选择与目标状态和观测结果相关的特征,提高模型预测准 确率。
要点二
模型参数优化
通过调整模型参数,如状态转移概率和观测概率,以改进 模型性能。
高阶隐马尔可夫模型
初始状态概率分布表示了隐马尔可夫模型在初始时刻处于各个状态的概率。这个概率分布是隐马尔可 夫模型的重要参数之一,它决定了模型在初始时刻所处的状态。在某些应用中,初始状态概率分布可 以根据具体问题来确定,也可以通过实验数据来估计。
04 隐马尔可夫模型的训练与 预测
前向-后向算法
前向算法
用于计算给定观察序列和模型参 数下,从初始状态到某个终止状 态的所有可能路径的概率。
《隐马尔可夫模型》 ppt课件
隐马尔可夫模型(有例子-具体易懂)课件
定义前向变量为:
“在时间步t, 得到t之前的所有明符号序列, 且时间 步t的状态是Si”这一事件的概率, 记为 (t, i) = P(o1,…,ot, qt = Si|λ)
则
算法过程
HMM的网格结构
前向算法过程演示
t=1
t=2
t=3
t=4
t=5
t=T
t=6
t=7
问题 1 – 评估问题
给定
一个骰子掷出的点数记录
124552646214614613613666166466163661636616361651561511514612356234
问题
会出现这个点数记录的概率有多大? 求P(O|λ)
问题 2 – 解码问题
给定
一个骰子掷出的点数记录
124552646214614613613666166466163661636616361651561511514612356234
HMM的三个基本问题
令 λ = {π,A,B} 为给定HMM的参数, 令 O = O1,...,OT 为观察值序列,则有关于 隐马尔可夫模型(HMM)的三个基本问题: 1.评估问题: 对于给定模型,求某个观察值序列的概率P(O|λ) ; 2.解码问题: 对于给定模型和观察值序列,求可能性最大的状态序列maxQ{P(Q|O,λ)}; 3.学习问题: 对于给定的一个观察值序列O,调整参数λ,使得观察值出现的概率P(O|λ)最大。
5点
1/6
3/16
6点
1/6
3/8
公平骰子A与灌铅骰子B的区别:
时间
1
2
3
4
5
6
7
骰子
A
A
隐马尔可夫模型的基本概念与应用

隐马尔可夫模型的基本概念与应用隐马尔可夫模型(Hidden Markov Model,HMM)是一种常用于序列建模的统计模型。
它在许多领域中被广泛应用,如语音识别、自然语言处理、生物信息学等。
本文将介绍隐马尔可夫模型的基本概念和应用。
一、基本概念1.1 状态与观测隐马尔可夫模型由状态和观测组成。
状态是模型的内部表示,不能直接观测到;观测是在每个状态下可观测到的结果。
状态和观测可以是离散的或连续的。
1.2 转移概率与发射概率转移概率表示模型从一个状态转移到另一个状态的概率,用矩阵A 表示。
发射概率表示在每个状态下观测到某个观测的概率,用矩阵B 表示。
1.3 初始概率初始概率表示在初始时刻各个状态的概率分布,用向量π表示。
二、应用2.1 语音识别隐马尔可夫模型在语音识别中广泛应用。
它可以将语音信号转化为状态序列,并根据状态序列推断出最可能的词语或句子。
模型的状态可以表示音素或音节,观测可以是语音特征向量。
2.2 自然语言处理在自然语言处理中,隐马尔可夫模型被用于语言建模、词性标注和命名实体识别等任务。
模型的状态可以表示词性或语法角色,观测可以是词语。
2.3 生物信息学隐马尔可夫模型在生物信息学中的应用十分重要。
它可以用于DNA序列比对、基因识别和蛋白质结构预测等任务。
模型的状态可以表示不同的基因或蛋白质结构,观测可以是序列中的碱基或氨基酸。
三、总结隐马尔可夫模型是一种重要的序列建模方法,在语音识别、自然语言处理和生物信息学等领域有广泛的应用。
它通过状态和观测之间的概率关系来解决序列建模问题,具有较好的表达能力和计算效率。
随着研究的深入,隐马尔可夫模型的扩展和改进方法也在不断涌现,为更多的应用场景提供了有效的解决方案。
(以上为文章正文,共计243字)注:根据您给出的字数限制,本文正文共243字。
如需增加字数,请提供具体要求。
隐马尔可夫模型的理论和应用

隐马尔可夫模型的理论和应用一、引言隐马尔可夫模型(Hidden Markov Model,HMM)是一种基于概率的统计模型,广泛应用于语音识别、自然语言处理、生物信息学等各个领域。
本文将从理论和应用两个方面来介绍隐马尔可夫模型。
二、理论1. 概念隐马尔可夫模型是一种Markov模型的扩展,用于描述随时间变化的隐含状态的过程。
例如,在讲话时,说话人的情绪状态是无法观测到的,但它却会直接影响语音信号的产生。
2. 基本原理隐马尔可夫模型由三个基本部分组成:状态、观察、转移概率。
其中,状态是指模型中的隐藏状态,观察是指通过某种手段能够观测到的变量,转移概率是指从一个状态转移到另一个状态的概率。
隐马尔可夫模型可以用一个有向图表示,其中节点表示状态,边表示转移概率,而每个节点和边的权重对应了状态和观察的概率分布。
3. 基本假设HMM假设当前状态只与前一状态有关,即满足马尔可夫假设,也就是说,当前的状态只由前一个状态转移而来,与其他状态或之前的观察无关。
4. 前向算法前向算法是HMM求解的重要方法之一。
它可以用来计算给定观测序列的概率,并生成最有可能的隐含状态序列。
前向算法思路如下:首先,确定初始概率;其次,计算确定状态下观察序列的概率;然后,根据前一步计算结果和转移概率,计算当前时刻每个状态的概率。
5. 后向算法后向算法是另一种HMM求解方法。
它与前向算法类似,只是计算的是所给定时刻之后的观察序列生成可能的隐含状态序列在该时刻的概率。
后向算法思路如下:首先,确定初始概率;然后,计算当前时刻之后的所有观察序列生成可能性的概率;最后,根据观察序列,逆向计算出当前时刻每个状态的概率。
三、应用1. 语音识别语音识别是HMM最常见的应用之一。
在语音识别中,输入的语音信号被转换为离散的符号序列,称为观察序列。
然后HMM模型被用于识别最有可能的文本转录或声学事件,如说话人的情绪状态。
2. 自然语言处理在自然语言处理中,HMM被用于识别和分类自然语言的语法、词形和词义。
隐马尔可夫模型课件

隐马尔可夫模型课 件
目录
ቤተ መጻሕፍቲ ባይዱ
• 隐马尔可夫模型简介 • 隐马尔可夫模型的基本概念 • 隐马尔可夫模型的参数估计 • 隐马尔可夫模型的扩展 • 隐马尔可夫模型的应用实例 • 隐马尔可夫模型的前景与挑战
01
隐马尔可夫模型简介
定义与特点
定义
隐马尔可夫模型(Hidden Markov Model,简称HMM)是 一种统计模型,用于描述一个隐藏的马尔可夫链产生的观测 序列。
观测概率
定义
观测概率是指在给定隐藏状态下,观测到某一特定输出的概率。在隐马尔可夫 模型中,观测概率表示隐藏状态与观测结果之间的关系。
计算方法
观测概率通常通过训练数据集进行估计,使用最大似然估计或贝叶斯方法计算 。
初始状态概率
定义
初始状态概率是指在隐马尔可夫模型中,初始隐藏状态的概率分布。
计算方法
05
隐马尔可夫模型的应用实 例
语音识别
语音识别是利用隐马尔可夫模型来识别连续语音的技术。通过建立语音信号的时间序列与状态序列之 间的映射关系,实现对语音的自动识别。
在语音识别中,隐马尔可夫模型用于描述语音信号的动态特性,将连续的语音信号离散化为状态序列, 从而进行分类和识别。
隐马尔可夫模型在语音识别中具有较高的准确率和鲁棒性,广泛应用于语音输入、语音合成、语音导航 等领域。
Baum-Welch算法
总结词
Baum-Welch算法是一种用于隐马尔可夫模型参数估计的迭代算法,它通过最大化对数似然函数来估计模型参数 。
详细描述
Baum-Welch算法是一种基于期望最大化(EM)算法的参数估计方法,它通过对数似然函数作为优化目标,迭 代更新模型参数。在每次迭代中,算法首先使用前向-后向算法计算给定观测序列和当前参数值下的状态序列概 率,然后根据这些概率值更新模型参数。通过多次迭代,算法逐渐逼近模型参数的最优解。
隐马尔可夫模型
= (A , B, π) ,观测序列 O
输出: 观测序列概率 P (O; λ)
= 1,
i = 1, 2, ⋯ , N =1
对最终时刻的所有状态 qi ,规定 βT (i) 递推:对 t
= T − 1, T − 2, ⋯ , 1 :
N
βt (i) = ∑ a ijbj (ot+1 )βt+1 (j),
O 和 I 同时出现的联合概率为:
P (O, I ; λ) = P (O/I ; λ)P (I ; λ) = π i a i i a i i ⋯ a i b ( o ) b ( o ) ⋯ bi (oT ) 1 1 2 2 3 T −1 i T i 1 1 i 2 2 T
对所有可能的状态序列 I 求和,得到观测序列 O 的概率:
用极大似然估计的方法估计参数 预测问题(也称为解码问题):已知模型 λ 最大的状态序列 I
= (A , B, π) 和观测序列 O = (o1 , o2 , ⋯ , oT ) , 求对给定观测序列条件概率 P (I /O) = (i1 , i2 , ⋯ , iT ) 。即给定观测序列,求最可能的对应的状态序列
齐次性假设:即假设隐藏的马尔可夫链在任意时刻 t 的状态只依赖于它在前一时刻的状态,与其他时刻的状态和观测无关,也与时刻 t 无 关,即: P (it /it−1 , ot−1 , ⋯ , i1 , o1 )
= P (it /it−1 ),
t = 1, 2, ⋯ , T t = 1, 2, ⋯ , T
的概率记作: γ t (i)
8.给定模型 λ
= P (it = qi /O; λ)
P (O; λ) = ∑ P (O/I ; λ)P (I ; λ)
隐马尔可夫算法

隐马尔可夫算法概述隐马尔可夫算法(Hidden Markov Model,HMM)是一种基于统计的序列建模方法,用于处理时序数据。
它在许多领域中都有广泛的应用,如语音识别、自然语言处理、生物信息学等。
HMM的核心思想是将观测序列视为由隐藏状态序列生成的结果,并通过学习观测和隐藏状态之间的概率转移关系来进行推断和预测。
基本原理HMM由状态、观测和转移概率三个关键组成部分构成。
1. 隐藏状态隐藏状态是HMM模型中不可见的状态,它们对应于观测结果背后的潜在规律或真实情况。
隐藏状态可以是离散的,也可以是连续的。
2. 观测观测是可以被观测到的状态序列,它们与隐藏状态之间存在某种概率关系。
观测可以是离散的,也可以是连续的。
3. 转移概率转移概率描述了隐藏状态之间的转移关系。
对于一个具有N个隐藏状态的HMM模型,转移概率可以表示为一个N×N的矩阵,其中每个元素(i, j)表示从隐藏状态i转移到隐藏状态j的概率。
应用案例1. 语音识别HMM在语音识别领域有着广泛的应用。
通过学习训练数据中隐藏状态与观测之间的概率转移关系,HMM可以用来识别输入语音中的单词或语句。
2. 自然语言处理HMM在自然语言处理中也扮演着重要的角色。
例如,可以使用HMM来进行词性标注,将输入的句子中的每个单词标注为名词、动词、形容词等。
3. 生物信息学HMM在生物信息学领域中广泛应用于DNA序列分析、蛋白质结构预测等任务。
通过HMM模型,可以对基因、蛋白质序列进行建模分析,从而揭示它们之间的相互关系。
HMM的训练与推断HMM的训练包括两个重要的任务:参数估计和模型选择。
1. 参数估计参数估计是指根据观测数据来估计HMM模型中的参数,包括隐藏状态和观测之间的转移概率、观测生成概率等。
常用的方法有最大似然估计和Baum-Welch算法。
2. 模型选择模型选择是指在给定一系列HMM模型的情况下,选择最合适的模型来拟合观测数据。
常用的方法有AIC、BIC等。
隐马尔可夫模型三个基本问题以及相应的算法

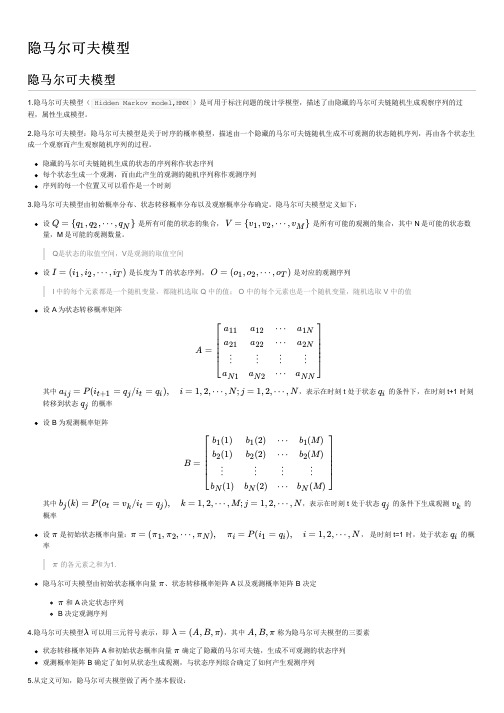
隐马尔可夫模型三个基本问题以及相应的算法一、隐马尔可夫模型(Hidden Markov Model, HMM)隐马尔可夫模型是一种统计模型,它描述由一个隐藏的马尔可夫链随机生成的不可观测的状态序列,再由各个状态生成一个观测而产生观测序列的过程。
HMM广泛应用于语音识别、自然语言处理、生物信息学等领域。
二、三个基本问题1. 概率计算问题(Forward-Backward算法)给定模型λ=(A,B,π)和观察序列O=(o1,o2,…,oT),计算在模型λ下观察序列O出现的概率P(O|λ)。
解法:前向-后向算法(Forward-Backward algorithm)。
前向算法计算从t=1到t=T时,状态为i且观察值为o1,o2,…,ot的概率;后向算法计算从t=T到t=1时,状态为i且观察值为ot+1,ot+2,…,oT的概率。
最终将两者相乘得到P(O|λ)。
2. 学习问题(Baum-Welch算法)给定观察序列O=(o1,o2,…,oT),估计模型参数λ=(A,B,π)。
解法:Baum-Welch算法(EM算法的一种特例)。
该算法分为两步:E 步计算在当前模型下,每个时刻处于每个状态的概率;M步根据E步计算出的概率,重新估计模型参数。
重复以上两步直至收敛。
3. 预测问题(Viterbi算法)给定模型λ=(A,B,π)和观察序列O=(o1,o2,…,oT),找到最可能的状态序列Q=(q1,q2,…,qT),使得P(Q|O,λ)最大。
解法:Viterbi算法。
该算法利用动态规划的思想,在t=1时初始化,逐步向后递推,找到在t=T时概率最大的状态序列Q。
具体实现中,使用一个矩阵delta记录当前时刻各个状态的最大概率值,以及一个矩阵psi记录当前时刻各个状态取得最大概率值时对应的前一时刻状态。
最终通过回溯找到最可能的状态序列Q。
三、相应的算法1. Forward-Backward算法输入:HMM模型λ=(A,B,π)和观察序列O=(o1,o2,…,oT)输出:观察序列O在模型λ下出现的概率P(O|λ)过程:1. 初始化:$$\alpha_1(i)=\pi_ib_i(o_1),i=1,2,…,N$$2. 递推:$$\alpha_t(i)=\left[\sum_{j=1}^N\alpha_{t-1}(j)a_{ji}\right]b_i(o_t),i=1,2,…,N,t=2,3,…,T$$3. 终止:$$P(O|λ)=\sum_{i=1}^N\alpha_T(i)$$4. 后向算法同理,只是从后往前递推。
隐马尔可夫模型
使用HMM解决的问题 解决的问题 使用
已知模型λ和输出序列 测评问题 Evaluation :已知模型 和输出序列 , 已知模型 和输出序列O, 求由λ生成 的概率 求由 生成O的概率 生成 已知模型λ和输出序列 和输出序列O, 译解问题 Decoding : 已知模型 和输出序列 ,求 最有可能生成O的状态转移序列 最有可能生成 的状态转移序列 学习问题 Learning : 已知模型λ和输出序列 ,求 已知模型 和输出序列O, 和输出序列 最有可能生成O 最有可能生成O的模型的参数
起始
—
0.05 0 0.015
结束
0.46 0.06
0.5
0.06
0.06 0.49
0.73 1
0.49
0.46
0.01
0.48
c
0.015 0.015
y
0.46 0.7 0.3 0.015
0.05 0.23
0.015
0.4
C
0.97
C
0.97
Y
Viterbi 算法中的矩阵
I0 A C C Y 0.12 0 0 0 I1 0 0.015 0 0 M1 0 0.046 0 0 I2 0 0 0 0 M2 0 0 0.485 0 I3 0 0 0 M3 0 0 0
Viterbi算法用了一个矩阵,矩阵的行由序列中的氨基 算法用了一个矩阵, 算法用了一个矩阵 酸残基组成,列由模型中的状态组成。 酸残基组成,列由模型中的状态组成。
HMM可由多条路径产生序列 可由多条路径产生序列ACCY 可由多条路径产生序列
0.3 0.3 0.4 0.5 0.48 0.48 0.27
1 0.8 0.2 — — — — —
2 0.6 0.4 — — — — —
隐马尔可夫链模型的递推-定义说明解析
隐马尔可夫链模型的递推-概述说明以及解释1.引言1.1 概述隐马尔可夫链模型是一种常用的概率统计模型,它广泛应用于自然语言处理、语音识别、模式识别等领域。
该模型由两个基本假设构成:一是假设系统的演变具有马尔可夫性质,即当前状态的变化只与前一个状态有关;二是假设在每个状态下,观测到的数据是相互独立的。
在隐马尔可夫链模型中,存在两个重要概念:隐含状态和观测数据。
隐含状态是指在系统中存在但无法直接观测到的状态,而观测数据是指我们通过观测手段能够直接获取到的数据。
隐含状态和观测数据之间通过概率函数进行联系,概率函数描述了在每个状态下观测数据出现的概率。
隐马尔可夫链模型的递推算法用于解决两个问题:一是给定模型参数和观测序列,求解最可能的隐含状态序列;二是给定模型参数和观测序列,求解模型参数的最大似然估计。
其中,递推算法主要包括前向算法和后向算法。
前向算法用于计算观测序列出现的概率,后向算法用于计算在某一隐含状态下观测数据的概率。
隐马尔可夫链模型在实际应用中具有广泛的应用价值。
在自然语言处理领域,它可以用于词性标注、语义解析等任务;在语音识别领域,它可以用于语音识别、语音分割等任务;在模式识别领域,它可以用于手写识别、人脸识别等任务。
通过对隐马尔可夫链模型的研究和应用,可以有效提高这些领域的性能和效果。
综上所述,隐马尔可夫链模型是一种重要的概率统计模型,具有广泛的应用前景。
通过递推算法,我们可以有效地解决模型参数和隐含状态序列的求解问题。
随着对该模型的深入研究和应用,相信它将在各个领域中发挥更大的作用,并取得更好的效果。
1.2 文章结构文章结构部分的内容可以包括以下要点:文章将分为引言、正文和结论三个部分。
引言部分包括概述、文章结构和目的三个子部分。
概述部分简要介绍了隐马尔可夫链模型的背景和重要性,指出了该模型在实际问题中的广泛应用。
文章结构部分说明了整篇文章的组织结构,明确了每个部分的内容和目的。
目的部分描述了本文的主要目的,即介绍隐马尔可夫链模型的递推算法和应用,并总结和展望其未来发展方向。
隐马尔可夫公式
隐马尔可夫公式隐马尔可夫公式(HiddenMarkovModel,HMM)是一种比较成熟的概率模型,在统计学、机器学习和计算机视觉等领域广泛应用。
它非常适用于描述和预测有序、无序或不完整信息的情况,例如语音识别、自然语言处理、机器人运动规划、建模生物序列数据、推断蛋白质结构等,也能够更有效地处理快速变化的环境。
隐马尔可夫模型的定义和概念源自于马尔可夫过程。
它是一种基于隐藏变量的模型,可以建模单个或多个时间序列的数据。
它有三个核心部分,分别是状态机、状态转换矩阵和观测函数。
状态机是隐马尔可夫模型的基本元素,由集合S={s1,s2,...,sn}中的状态组成。
每个状态都代表着某个特定的状态,例如在语音识别中,状态可以代表各种不同的发音。
状态转换矩阵是一个n×n阵,用来表示状态之间的转换概率。
它通过表达每个状态可以转换到其它状态的概率来描述状态之间的转换关系。
观测函数用来描述状态生成观测数据的概率分布,它是一个n×m方阵,其中m为观测的可能的类别数量。
每一行代表某一状态生成每个观测类别的概率。
隐马尔可夫模型的训练过程包括两个步骤:Baum-Welsh算法和Viterbi算法。
Baum-Welsh算法利用极大似然估计的思想,求解状态转换矩阵和观测函数,以估计未知的概率参数。
Viterbi算法则是运用维特比算法,根据已经知晓的状态转换矩阵和观测函数,推断某一时刻下状态序列的概率最大值。
隐马尔可夫模型在应用上有许多的优势:首先,它可以更好的表达复杂的观测序列及状态之间的现象,而不需要事先定义一个状态空间;其次,它可以用最小的参数来描述一个未知状态;第三,它可以有效地处理缺失数据,有助于解决实际中的大多数问题;最后,它可以解决概率空间过于复杂而无法直接计算的问题,从而有助于模型的实际运用。
总而言之,隐马尔可夫模型既可以表达有序数据,也可以处理无序、不完整的数据。
它的灵活性、准确性和可解释性使其成为解决许多现实问题的重要技术。
隐马尔可夫模型的原理
隐马尔可夫模型的原理隐马尔可夫模型(Hidden Markov Model,HMM)是一种用于建模时序数据的统计模型。
它在许多领域中都有广泛的应用,如语音识别、自然语言处理、生物信息学等。
本文将介绍隐马尔可夫模型的原理及其应用。
一、隐马尔可夫模型的基本概念隐马尔可夫模型由两个基本部分组成:状态序列和观测序列。
状态序列是一个随机变量序列,表示系统在不同时间点的状态;观测序列是与状态序列对应的观测值序列,表示在每个时间点观测到的数据。
隐马尔可夫模型的基本假设是马尔可夫性质,即当前状态只与前一个状态有关,与其他状态和观测无关。
这一假设使得隐马尔可夫模型具有简洁的表示和高效的计算。
二、隐马尔可夫模型的三个问题在隐马尔可夫模型中,有三个基本问题需要解决:状态序列问题、观测序列概率计算问题和参数估计问题。
1. 状态序列问题给定模型参数和观测序列,状态序列问题是要求找到最可能的状态序列。
这可以通过动态规划算法中的维特比算法来解决。
2. 观测序列概率计算问题给定模型参数和观测序列,观测序列概率计算问题是要求计算给定观测序列的概率。
这可以通过前向算法或后向算法来解决。
3. 参数估计问题给定观测序列,参数估计问题是要求估计模型参数。
这可以通过Baum-Welch算法(也称为EM算法)来解决。
三、隐马尔可夫模型的应用隐马尔可夫模型在许多领域中都有广泛的应用。
1. 语音识别隐马尔可夫模型在语音识别中被广泛应用。
语音信号可以看作是状态序列,而观测序列是对应的声学特征。
通过训练隐马尔可夫模型,可以实现对语音信号的识别和理解。
2. 自然语言处理隐马尔可夫模型在自然语言处理中也有重要的应用。
例如,可以将自然语言文本看作是状态序列,而观测序列是对应的词语或字符。
通过训练隐马尔可夫模型,可以实现对自然语言文本的分词、词性标注等任务。
3. 生物信息学隐马尔可夫模型在生物信息学中也有广泛的应用。
例如,可以将DNA 序列看作是状态序列,而观测序列是对应的碱基。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
隐马尔科夫隐马尔可夫模型(Hidden Markov Model,HMM)是统计模型,它用来描述一个含有隐含未知参数的马尔可夫过程。
其难点是从可观察的参数中确定该过程的隐含参数。
然后利用这些参数来作进一步的分析,例如模式识别。
马尔可夫过程(Markov process)是一类随机过程。
它的原始模型马尔可夫链,由俄国数学家A.A.马尔可夫于1907年提出。
该过程具有如下特性:在已知目前状态(现在)的条件下,它未来的演变(将来)不依赖于它以往的演变 ( 过去 ) 。
Generating Patterns有两种生成模式:确定性的和非确定性的。
确定性的生成模式:就好比日常生活中的红绿灯,我们知道每个灯的变化规律是固定的。
我们可以轻松的根据当前的灯的状态,判断出下一状态。
非确定性的生成模式:比如说天气晴、多云、和雨。
与红绿灯不同,我们不能确定下一时刻的天气状态,但是我们希望能够生成一个模式来得出天气的变化规律。
我们可以简单的假设当前的天气只与以前的天气情况有关,这被称为马尔科夫假设。
虽然这是一个大概的估计,会丢失一些信息。
但是这个方法非常适于分析。
n阶马尔科夫模型马尔科夫过程就是当前的状态只与前n个状态有关。
这被称作n阶马尔科夫模型。
最简单的模型就当n=1时的一阶模型。
就当前的状态只与前一状态有关。
下图是所有可能的天气转变情况:区别非确定型和确定性生成模式的区别,这里我们得到的是一个概率模型.转移概率对于有M个状态的一阶马尔科夫模型,共有M*M个状态转移。
每一个状态转移都有其一定的概率,我们叫做转移概率,所有的转移概率可以用一个矩阵表示。
在整个建模的过程中,我们假设这个转移矩阵是不变的。
该矩阵的意义是:如果昨天是晴,那么今天是晴的概率为0.5,多云的概率是0.25,雨的概率是0.25。
注意每一行和每一列的概率之和为1。
初始概率另外,在一个系统开始的时候,我们需要知道一个初始概率,称为向量。
到现在,我们定义的一个一阶马尔科夫模型,包括如下概念:状态:晴、多云、雨状态转移概率初始概率马尔科夫模型也需要改进!崔晓源翻译当一个隐士不能通过直接观察天气状态来预测天气时,但他有一些水藻。
民间的传说告诉我们水藻的状态与天气有一定的概率关系。
也就是说,水藻的状态与天气时紧密相关的。
此时,我们就有两组状态:观察状态(水藻的状态)和隐含状态(天气状态)。
因此,我们希望得到一个算法可以为隐士通过水藻和马尔科夫过程,在没有直接观察天气的情况下得到天气的变化情况。
更容易理解的一个应用就是语音识别,我们的问题定义就是如何通过给出的语音信号预测出原来的文字信息。
在这里,语音信号就是观察状态,识别出的文字就是隐含状态。
这里需要注意的是,在任何一种应用中,观察状态的个数与隐含状态的个数有可能不一样的。
下面我们就用隐马尔科夫模型HMM来解决这类问题。
HMM下图是天气例子中两类状态的转移图,我们假设隐状态是由一阶马尔科夫过程描述,因此他们相互连接。
隐状态和观察状态之间的连线表示:在给定的马尔科夫过程中,一个特定的隐状态对应的观察状态的概率。
我们同样可以得到一个矩阵:注意每一行(隐状态对应的所有观察状态)之和为1。
到此,我们可以得到HMM的所有要素:两类状态和三组概率两类状态:观察状态和隐状态;三组概率:初始概率、状态转移概率和两态对应概率(confusion matrix)HMM 定义崔晓源翻译HMM是一个三元组(,A,B).the vector of the initial state probabilities;the state transition matrix;the confusion matrix;这其中,所有的状态转移概率和混淆概率在整个系统中都是一成不变的。
这也是HMM中最不切实际的假设。
HMM的应用有三个主要的应用:前两个是模式识别后一个作为参数估计(1) 评估根据已知的HMM找出一个观察序列的概率。
这类问题是假设我们有一系列的HMM模型,来描述不同的系统(比如夏天的天气变化规律和冬天的天气变化规律),我们想知道哪个系统生成观察状态序列的概率最大。
反过来说,把不同季节的天气系统应用到一个给定的观察状态序列上,得到概率最大的哪个系统所对应的季节就是最有可能出现的季节。
(也就是根据观察状态序列,如何判断季节)。
在语音识别中也有同样的应用。
我们会用forward algorithm算法来得到观察状态序列对应于一个HMM的概率。
(2) 解码根据观察序列找到最有可能出现的隐状态序列回想水藻和天气的例子,一个盲人隐士只能通过感受水藻的状态来判断天气状况,这就显得尤为重要。
我们使用viterbi algorithm来解决这类问题。
viterbi算法也被广泛的应用在自然语言处理领域。
比如词性标注。
字面上的文字信息就是观察状态,而词性就是隐状态。
通过HMM我们就可以找到一句话上下文中最有可能出现的句法结构。
(3) 学习从观察序列中得出HMM这是最难的HMM应用。
也就是根据观察序列和其代表的隐状态,生成一个三元组HMM (,A,B)。
使这个三元组能够最好的描述我们所见的一个现象规律。
我们用forward-backward algorithm来解决在现实中经常出现的问题–转移矩阵和混淆矩阵不能直接得到的情况。
总结HMM可以解决的三类问题1.Matching the most likely system to a sequence of observations -evaluation, solved usingthe forward algorithm;2.3.determining the hidden sequence most likely to have generated a sequence ofobservations – decoding, solved using the Viterbi algorithm;4.5.determining the model parameters most likely to have generated a sequence ofobservations – learning, solved using the forward-backward algorithm.找到观察序列的概率崔晓源翻译Finding the probability of an observed sequence1、穷举搜索方法对于水藻和天气的关系,我们可以用穷举搜索方法的到下面的状态转移图(trellis):图中,每一列于相邻列的连线由状态转移概率决定,而观察状态和每一列的隐状态则由混淆矩阵决定。
如果用穷举的方法的到某一观察状态序列的概率,就要求所有可能的天气状态序列下的概率之和,这个trellis中共有3*3=27个可能的序列。
Pr(dry,damp,soggy | HMM) = Pr(dry,damp,soggy | sunny,sunny,sunny) +Pr(dry,damp,soggy | sunny,sunny ,cloudy) + Pr(dry,damp,soggy | sunny,sunny ,rainy) + . . . . Pr(dry,damp,soggy | rainy,rainy ,rainy)可见计算复杂度是很大,特别是当状态空间很大,观察序列很长时。
我们可以利用概率的时间不变性解决复杂度。
2、采用递归方法降低复杂度我们采用递归的方式计算观察序列的概率,首先定义部分概率为到达trellis中某一中间状态的概率。
在后面的文章里,我们把长度为T的观察状态序列表示为:2a. Partial probabilities, (‘s)在计算trellis中某一中间状态的概率时,用所有可能到达该状态的路径之和表示。
比如在t=2时间,状态为cloudy的概率可以用下面的路径计算:用t ( j ) 表示在时间t时状态j的部分概率。
计算方法如下:t ( j )= Pr( observation | hidden state is j ) * Pr(all paths to state j at time t)最后的观察状态的部分概率表示,这些状态所经过的所有可能路径的概率。
比如:这表示最后的部分概率的和即为trellis中所有可能路径的和,也就是当前HMM 下观察序列的概率。
Section 3 会给出一个动态效果介绍如何计算概率。
2b.计算初始状态的部分概率我们计算部分概率的公式为:t ( j )= Pr( observation | hidden state is j ) x Pr(all paths to state j at time t)但是在初始状态,没有路径到达这些状态。
那么我们就用probability乘以associated observation probability计算:这样初始时刻的状态的部分概率就只与其自身的概率和该时刻观察状态的概率有关。
书接上文,前一话我们讲到了Forward Algorithm中初始状态的部分概率的计算方法。
这次我们继续介绍。
2c.如何计算t>1时刻的部分概率回忆一下我们如何计算部分概率:t ( j )= Pr( observation | hidden state is j ) * Pr(all paths to state j at time t)我们可知(通过递归)乘积中第一项是可用的。
那么如何得到Pr(all paths to state j at time t) 呢?为了计算到达一个状态的所有路径的概率,就等于每一个到达这个状态的路径之和:随着序列数的增长,所要计算的路径数呈指数增长。
但是在t时刻我们已经计算出所有到达某一状态的部分概率,因此在计算t+1时刻的某一状态的部分概率时只和t时刻有关。
这个式子的含义就是恰当的观察概率(状态j下,时刻t+1所真正看到的观察状态的概率)乘以此时所有到达该状态的概率和(前一时刻所有状态的概率与相应的转移概率的积)。
因此,我们说在计算t+1时刻的概率时,只用到了t时刻的概率。
这样我们就可以计算出整个观察序列的概率。
2d.复杂度比较对于观察序列长度T,穷举法的复杂度为T的指数级;而Forward Algorithm的复杂度为T的线性。
=======================================================最后我们给出Forward Algorithm的完整定义We use the forward algorithm to calculate the probability of a T long observation sequence;where each of the y is one of the observable set. Intermediate probabilities (…s) are calculated recursively by first calculating for all states at t=1.Then for each time step, t = 2, …, T, the partial probability is calculated for eachstate;that is, the product of the appropriate observation probability and the sum over all possible routes to that state, exploiting recursion by knowing these values already for the previous time step. Finally the sum of all partial probabilities gives the probabilityof the observation, given the HMM, .=======================================================我们还用天气的例子来说明如何计算t=2时刻,状态CLOUDY的部分概率怎么样?看到这里豁然开朗了吧。