一种新型棋盘格角点检测算法
一种基于灰度投影的中国象棋棋盘角点检测算法
A Co r n e r De t e c t i o n Al g o r i t h m o f Ch i n e s e Ch e s s Ch e s s b o a r d
Ba s e d o n Gr a y Va l a c t I n t h i s p a p e r ,a n a l g o r i t h m o f C O l T l e r d e t e c t i o n o f C h i n e s e c h e s s c h e s s b o a r d i s p r o p o s e d .F i r s t l y , L S D a l g o i r t h m i s a p p l i e d t o d e t e c t i n g mo s t o f t h e s t r a i g h t l i n e o n g r a y i ma g e o f c h e s s b o a r d . T h e n t h e c o me s r o f c h e s s b o a r d a r e a c c u r a t e l y
d e t e c t e d b y u s i n g t h e p r o j e c t i o n h i s t o g r a m b a s e d o n g r a y v a l u e a r e a a n d s t r a i g h t l i n e i n t e r s e c t i o n p o i n t d e t e c t i o n m e t h o d
棋盘角点检测算法

棋盘角点检测算法棋盘角点检测算法,也称为棋盘格标定算法,是计算机视觉中常用的一种图像处理算法。
在机器视觉应用中,棋盘角点检测可以用于相机标定、三维重建、姿态估计等任务。
本文将详细介绍棋盘角点检测算法的原理、流程和一些改进方法。
一、原理二、流程1.图像预处理:先将彩色图像转换为灰度图像,然后进行高斯滤波或其他滤波操作,以去除图像中的噪声和干扰。
2. 边缘检测:使用边缘检测算法(如Canny边缘检测)来提取图像中的边缘。
这些边缘通常是由棋盘格的线条组成的。
3.直线检测:通过霍夫变换等方法,检测出图像中的直线。
这些直线通常是由边缘检测得到的边缘组成的。
4.直线交点检测:对于每一对相互垂直的直线,计算它们的交点坐标。
这些交点就是棋盘格的角点。
5.角点筛选:根据棋盘格的特点,筛选出合理的角点坐标。
比如,可以使用基于像素距离的阈值,去除过近或过远的角点。
6.角点亚像素精确定位:通过图像插值等方法,对角点进行亚像素级别的精确定位,以提高角点的精度。
7.角点输出:将角点的坐标输出,可以用于后续的计算和应用。
三、改进方法除了上述基本流程,还可以使用一些改进方法来提高棋盘角点检测算法的准确性和鲁棒性。
下面介绍几种常用的改进方法:1.非极大值抑制:在直线检测时,使用非极大值抑制来减少直线的数量,从而减小计算复杂度。
2.子像素角点检测:通过图像插值等方法,对角点进行亚像素级别的定位,提高角点坐标的精度。
3.自适应阈值:根据图像的亮度和对比度等特征,自适应地调整阈值,以适应不同的图像特点。
4.形态学操作:对图像进行形态学操作,如膨胀和腐蚀,可以增强角点的检测结果。
5.模板匹配:使用模板匹配方法,将棋盘格模板与图像进行匹配,可以提高角点检测的准确性。
以上是常见的一些棋盘角点检测算法及其改进方法的介绍。
随着计算机视觉技术的不断发展,棋盘角点检测算法在实际应用中的性能和精度还有进一步提高的空间。
棋盘角点检测算法
棋盘角点检测算法1. 简介棋盘角点检测算法是计算机视觉领域中的一个重要任务,它主要用于在图像或视频中自动识别出棋盘格的角点。
这个任务在许多应用中都有广泛的应用,例如相机标定、三维重建、机器人导航等。
在本文中,我们将介绍棋盘角点检测算法的原理、常用方法和一些优化技术。
我们将从基础开始逐步展开,带你深入了解这一算法。
2. 原理棋盘角点检测算法的原理基于图像中棋盘格的特殊结构。
棋盘格由一系列平行线和垂直线交叉形成,而这些交叉点就是我们所说的角点。
为了检测出这些角点,我们需要寻找图像中亮度变化明显的区域。
通常情况下,黑白相间且边缘清晰的区域更容易被检测到。
3. 常用方法3.1 Harris 角点检测算法Harris 角点检测算法是最经典也是最常用的方法之一。
它通过计算图像中每个像素的角点响应函数来判断其是否为角点。
算法的基本思想是,对于图像中的某个像素,我们通过计算它在 x 和 y 方向上的梯度,然后根据这些梯度计算一个协方差矩阵。
最后,通过对协方差矩阵进行特征值分解,我们可以得到一个角点响应函数。
3.2 Shi-Tomasi 角点检测算法Shi-Tomasi 角点检测算法是对 Harris 角点检测算法的改进。
它在计算角点响应函数时使用了更加鲁棒和准确的评价指标。
具体来说,Shi-Tomasi 算法使用了最小特征值作为角点响应函数。
这样做可以使得算法对噪声更加鲁棒,并且能够检测到更准确的角点。
3.3 FAST 角点检测算法FAST(Features from Accelerated Segment Test)角点检测算法是一种高效的角点检测方法。
它通过快速地比较像素周围相邻像素的灰度值来判断当前像素是否为角点。
FAST 算法首先选择一个中心像素,然后选取周围一圈像素作为候选集。
接下来,算法会根据一定的阈值和连续像素数量来判断中心像素是否为角点。
FAST 算法的优势在于其计算速度非常快,适用于实时应用和大规模图像处理。
棋盘格检测方法

棋盘格检测方法
棋盘格检测可以采用局部平均自适应阈值化、图像膨胀、四边形检测和角点检测等方法。
具体步骤如下:
1. 局部平均自适应阈值化:用于分离各个黑块四边形的衔接,通过膨胀白色像素点来缩小黑块四边形并断掉衔接。
2. 图像膨胀:通过膨胀操作,进一步分离各个四边形。
3. 四边形检测:计算每个轮廓的凸包,进行多边形检测,判断是否只有四个顶点,若是则为四边形。
再利用长宽比、周长和面积等约束去除一些干扰四边形。
4. 角点检测:将每个四边形作为一个单元,根据邻近关系进行排序。
然后,取对角两个四边形相对的两个点的连线的中间点作为角点。
无邻近四边形的为干扰四边形,两个邻近四边形为边界处四边形,四个邻近四边形为内部四边形。
此外,为了提高棋盘格检测的稳定性和可靠性,可以考虑以下因素:
1. 局部自适应阈值化的窗口大小设置。
2. 膨胀的次数。
3. 该流程是否需要多次重复操作。
以上信息仅供参考,如有需要,建议咨询计算机视觉领域专业人士。
棋盘角点检测算法

棋盘角点检测算法引言棋盘角点检测算法是计算机视觉领域中的一个重要问题,它在许多应用中都有广泛的应用,例如机器人导航、虚拟现实和增强现实等。
棋盘角点指的是棋盘图案中的交叉点,检测这些角点可以用于姿态估计、图像校正和三维重建等任务。
本文将介绍几种常见的棋盘角点检测算法,并对它们进行详细的分析和比较。
首先,我们将介绍传统方法中最常用的基于角度变化的方法,然后介绍基于特征匹配和深度学习的最新方法。
最后,我们将讨论这些算法在不同场景下的优缺点和适用性。
传统方法基于角度变化的方法基于角度变化的方法是最早被提出并广泛应用于棋盘角点检测问题的一类方法。
这类方法通过计算图像中像素灰度值在不同方向上的梯度变化来检测角点。
其中最著名且经典的算法是Harris角点检测算法。
该算法通过计算每个像素点的角度变化来判断是否为角点。
具体而言,Harris算法首先计算每个像素点的梯度向量,然后通过计算梯度向量的自相关矩阵来估计角点响应函数。
最后,通过设置一个阈值来筛选出角点。
除了Harris算法,还有其他一些基于角度变化的方法,如Shi-Tomasi角点检测算法和Moravec角点检测算法。
这些方法在实践中都取得了不错的效果,并被广泛应用于棋盘角点检测任务中。
特征描述子匹配方法除了基于角度变化的方法外,还有一类常用的棋盘角点检测方法是基于特征描述子匹配的方法。
这类方法通过提取图像中的特征描述子,并利用这些描述子进行匹配来检测棋盘角点。
其中最典型且常用的算法是SIFT(尺度不变特征变换)和SURF(加速稳健特征)算法。
这两个算法都可以提取图像中的稳定特征,并且对尺度、旋转和亮度等变化具有较好的不变性。
在使用SIFT或SURF进行棋盘角点检测时,首先需要提取图像中的关键点,然后计算每个关键点的特征描述子。
最后,通过匹配特征描述子来确定棋盘角点的位置。
深度学习方法近年来,随着深度学习的发展,越来越多的研究者开始尝试使用深度学习方法解决棋盘角点检测问题。
用于摄像机标定的棋盘图像角点检测新算法
仪 器 仪 表 学 报第 32卷 第 5期 2011年 5月Vo l 132 No 15 M ay . 2011Ch i ne s e Jo u r na l of S c i en t ific In s tru m e n t用于摄像机标定的棋盘图像角点检测新算法3杨幸芳 1 , 2, 黄玉美 1, 高 峰 1, 杨新刚 1, 韩旭1( 1 西安理工大学 西安 710048; 2 西安工程大学 西安 710048 )摘 要 : 摄像机标定是从二维图像获取准确的三维信息的必要步骤 ,摄像机标定的精度在很大程度上取决于标定板控制点的图像定位精度 ,鉴于此 ,对棋盘格标定板图像的角点定位问题进行了研究 。
笔者通过对图像像素类型及其性质进行分析 ,提出 了以小邻域环形模板上像素灰度的跳变次数为判据的棋盘角点检测新算法 ,该算法不但能快速检测出角点 ,而且还能确定角点 的类型 。
利用此性质 ,剔除了容易受外界环境影响的棋盘外圈角点 ,即非 X 型角点 ,从而从另一个角度保证了所提取角点的精 度 。
为了达到更高的精度 ,笔者以棋盘图像的高度对称性为依托 ,在每个初定位角点的局部邻域内 ,用灰度重心法对角点进行 了亚像素定位 。
实验结果表明 ,提出的算法具有较高的精度 ,能够为高精度摄像机标定提供可靠数据 。
关键词 : 摄像机标定 ; 棋盘图像 ; 角点检测 ; 亚像素定位 中图分类号 : TP391. 41文献标识码 : A国家标准学科分类代码 : 520. 6040New corn e r de t ec t i on a lgor ith m of che ssboa r d i m a g e forcam era ca l i bra t i onYang X i ngfang1 , 2, H u ang Yum e i 1 , Gao Feng 1 , Yang X i ngang 1 , H a n Xuz hao 1( 1 X i ’an U n i versity of Techno l o gy, X i ’an 710048, Ch ina ; 2 X i ’an Poly t echn ic U n i versity, X i ’an 710048, Ch i na )A b s tra c t : Cam e r a ca l i b r a t i o n is a nece s sa r y ste p t o ob t a i n accu r a t e th ree 2d i m e n s i o na l i nf o r m a t i o n fr om t w o 2d i m e n 2 si o na l i m a ge s . The p rec i s i o n of cam e ra ca li b ra t i o n dep e nd s l a rge l y on the po s iti o n i ng accu r acy of the i m a ge co r re 2 spond i ng t o t he con t r o l po i n t s on ca l i b ra t i o n boa r d; i n vi ew of th is, the co r ne r po s iti o n i ng p r ob l em of che s sboa r d i m 2 age is stud i ed i n th i s p a p e r . Th r ough ana l yzi ng i m a ge p ixe l typ e s and the i r cha r ac t e r isti c s , the au t ho r s p r opo s e a ne w co r ne r de t ec t i o n a l go r ithm of che s sboa r d i m a ge, wh i ch u t iliz e s the change ti m e s of b ri gh t ne s s on ri ng 2shap e d m a s k s i n a s m a l l ne i ghbo rhood a s the c r ite r i o n. The p r opo s ed a l go r ithm can no t on l y de t ec t the co r ne rs qu i ck l y bu t a l so d is 2 ti ngu i sh the typ e s of co r ne r s . A c co r d i ng t o th is cha r ac t e r isti c, the ou t e r mo s t che s sboa r d co r ne r s, i . e . non X 2typ e co r ne r s a r e exc l uded, wh i ch the r eby en s u r e s the p rec i si o n of the de t ec t ed co rne r s fr om ano t he r a s p e c t . I n o r de r t o a 2 ch i eve sub 2p ix e l p rec isi o n, ba s ed on the h i gh symm e t ry of che s sboa r d i m a ge, the b r i gh t ne s s gravity cen t e r m e t hod isu s ed t o po s iti o n the co r ne r s i n eve ry l o ca l ne i ghbo r hood of the i n i ti a l l y po s iti o ned co rne r . Ex p e r i m e n t a l re s u l ts show tha t the p r opo s ed a l go r ithm ha s h i gh p rec i si o n and can p r ovi de re li ab l e da t a f o r h i gh 2p rec i si o n cam e ra ca l i b ra t i o n. Key word s : cam e ra ca li b ra t i o n; che s sboa r d i m a ge; co r ne r de t ec t i o n; sub 2p ix e l po s iti o n i ng检测和监控等领域[ 325 ]。
棋盘角点检测算法
棋盘角点检测算法
棋盘角点检测算法是一种用于检测棋盘格角点的图像处理算法。
它通过分析图像中的边缘和角点特征来确定棋盘格角点的位置。
以下是一个简单的棋盘角点检测算法的步骤:
1. 将图像转换为灰度图像,以便于后续的处理。
2. 使用边缘检测算法(如Canny边缘检测)来检测图像中的
边缘。
3. 对边缘图像进行角点检测。
可以使用Harris角点检测算法、Shi-Tomasi角点检测算法或更高级的角点检测算法(如SIFT
或SURF)。
4. 对检测到的角点进行筛选和排序,以去除重复的角点,并按照特定的顺序排列。
5. 通过棋盘格的特殊结构,利用角点之间的距离关系和角点特征,确定棋盘格的外角点。
6. 根据外角点和棋盘格的特定结构,计算棋盘格的内角点。
棋盘格的内角点是由外角点确定的直线上的交点。
7. 根据检测到的棋盘格角点,可以进行影像的校正、姿态估计或其他相机标定相关操作。
需要注意的是,棋盘角点检测算法对图像质量和角点特征的影响非常敏感,因此在实际应用中,可能需要进行一些预处理(例如图像增强、噪声去除等)来提高算法的准确性和稳定性。
一种新型棋盘格角点检测算法

一种新型棋盘格角点检测算法毕运锋;许钢;江娟娟;吴益红;刘亚梅【期刊名称】《南阳师范学院学报》【年(卷),期】2016(015)003【摘要】Aiming at the corner detection for calibration board of chessboard pattern in the camera, a kind of cor-ner detection algorithm has been put forward based on the image pixel distribution. Firstly, the even zone points are removed by estimating the number of similar points around the pixel point 8 . Then the upper matrix of diago-nal is extracted according to the feature of height symmetry in chessboard pattern image to determine whether the central point is the corner candidate. At the end, through the calculation of the selected corner candidates getting the coordinate in average and the final angle point is obtained. The experimental result shows that the method can solve the testing problem of the chessboard angle points in a better way.%针对摄像机标定中棋盘格标定板的角点检测,给出了一种基于图像像素点分布的角点检测算法。
charuco角点检测迭代公式
charuco角点检测迭代公式Charuco角点检测迭代公式是一种用于检测Charuco棋盘角点的数
学公式。
Charuco棋盘是一种结合了棋盘格和ArUco码的标定板,用于相机标定和计算机视觉任务中的姿态估计。
Charuco角点检测迭代公式可以通过对Charuco棋盘图像进行分析
和处理,准确地检测到各个棋盘格的角点。
这些角点在计算机视觉中
起到了至关重要的作用,可用于相机标定、位姿估计和三维重建等任务。
Charuco角点检测迭代公式的原理是基于像素灰度变化的模式来识
别角点。
通过对图像中的每个像素点进行分析,公式可以根据像素点
处的亮度变化来确定是否为Charuco棋盘格的角点。
这种方法相比传统的基于特征匹配的方法,具有更高的准确性和鲁棒性。
在实际应用中,Charuco角点检测迭代公式通常通过迭代的方式来
提高检测的准确性。
公式会根据前一次迭代的结果,不断优化检测算法,以获得更精确的角点位置。
通过多次迭代,可以得到更准确的Charuco角点检测结果。
Charuco角点检测迭代公式是一种用于检测Charuco棋盘格角点的
数学公式,通过迭代的方式提高检测准确性。
这种方法在计算机视觉
领域的相机标定、位姿估计和三维重建等任务中具有广泛的应用前景。
针对棋盘格角点快速检测的一种新方法
C m u rE gnei n p l a os o p t nier g a dA pi t n 计算机 工程 与应用 e n ci
针对棋盘格角 点快 速检测 的一种新 方法
张铁 楠 , 涂亚庆 , 王德超
ZHANG e na TU -q n W ANG De h o Ti - n, Ya i g, -c a
l 引言
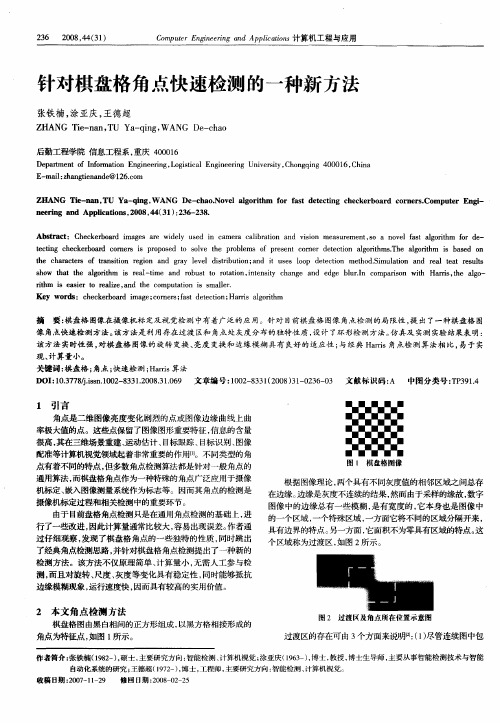
角点是二维 图像亮 度变 化剧烈的点或图像边缘 曲线 上曲 率极大值的点。这些点保留了图像 图形重要特征 , 信息的含量
很高 , 其在三维场景重建 、 运动估计 、 标跟踪 、 标识别 、 目 目 图像 配准等计算机视觉领域起着非常重要的作用【 1 I 。不同类型的角
点有着不同的特点 , 多数角点检 测算法都是针对一般角点的 但 通用算法 , 而棋盘格角点作为一种特殊 的角点广泛应用于摄像 机标定 、 嵌入 图像测量系统作为标志等。因而其 角点的检测是 摄像机标定过程和相关检测中的重要环节。
该方法 实时性强 , 对棋 盘格 图像 的旋转变换、 亮度 变换 和边缘 模糊具有 良好的适应性 ; 与经典 H rs角点检测 算法相比 , ar i 易于 实
现、 计算量小。 关键词 : 棋盘格 ; 角点 ; 快速检测 ; a i算 法 H rs r
DOI1.7 8 .s. 0 — 3 1 0 8 1 6 文 章编 号 :0 2 8 3 (0 8 3 — 2 6 0 文献 标 识 码 : 中图 分 类 号 :P 9 . :037 /i n1 2 8 3 . 0 . . 9 js 0 2 30 10 — 3 12 0 )1 0 3 — 3 A T31 4
n eig a d Ap l a o s2 0 ,4 3 )2 6 2 8 er n p c t n ,0 8 4 (1 :3 - 3 . n i i
一种新的棋盘格角点检测方法
I y:血
式中: X, 是 P的图像坐标 , , 是空 间 ( y) ; Y ) (
收稿 日期 :00—0 21 3—0 1
3× 3 正交单位 矩 阵 ; T为 三
维平移向量 ; 0=( ,,) ; 为 4 4 00 0T Ml X 矩阵。 在 图像坐 标系 中 , 设原 点 0l , 坐标系 中 ( )
1 摄像 机成像原理
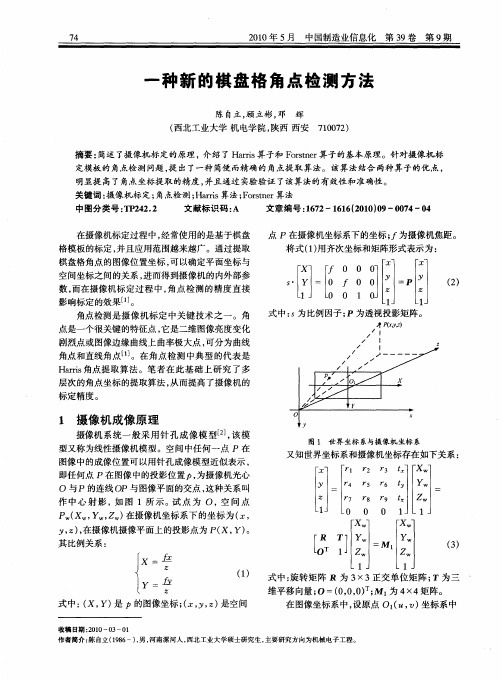
摄像机系统一般采用针 孔成像模型 , 2 该模
型 又称为线 性摄像 机模 型 。空 间 中任 何 一点 P 在 图像 中的成 像位 置可 以用针孔 成像模 型近似 表示 , 即任 何点 P在 图像 中的投影 位置 P, 为摄像 机光 心
图 l 世 界 坐 标 系与摄 像 机 坐标 系
定 大 小 的窗 口中 ,
0
0
将式 () ( ) 入式 ( ) , 以 得 到世 界 坐 3和 5代 2中 可 标 系表示 的 P 坐标 与其 投影 点 P点 坐标 ( )的 “, 关系, 如式 () 6 所示 :
1 u , 、
u , 、
1
0
0
詈
I 0 l o d q , 0
定模板的角点检测问题 , 出了一种简便而精确的角点提取算法。该算法结合 两种算子的优 点, 提 明显提高了角点坐标提取的精度 , 并且通过实验验证 了该算法的有效性和准确性。 关键词 : 摄像机标定; 角点检测; a i算法;os e 算法 H rs r F r nr t 中图分 类号 : P 4 . T 2 22 文献标 识码 : A 文章 编号 :6 2 6 6 2 1 )9 0 4一O 1 7 —1 1 ( 0 0 0 —0 7 4
点是一个很关键的特征点 , 它是二维图像亮度变化 剧烈点或图像边缘 曲线上曲率极大点, 可分为曲线 角点 和直线 角 点… 1。在 角 点 检测 中典 型 的代 表 是
matlab棋盘格角点检测算法
matlab棋盘格角点检测算法标题,基于Matlab的棋盘格角点检测算法。
摘要:棋盘格角点检测是计算机视觉领域中的一个重要问题,它在相机标定、三维重建等应用中起着关键作用。
本文介绍了基于Matlab 的棋盘格角点检测算法,通过分析图像中的棋盘格特征,利用Matlab提供的图像处理工具和计算机视觉工具箱,实现了对棋盘格角点的自动检测和提取。
介绍:棋盘格角点检测是计算机视觉中的一个经典问题,它通常用于相机标定和图像校正等应用中。
在相机标定中,需要通过棋盘格的角点来计算相机的内参和外参,从而实现对图像的准确校正和三维重建。
因此,棋盘格角点检测算法的准确性和稳定性对于相机标定和图像处理的准确性至关重要。
Matlab作为一个强大的科学计算和图像处理工具,提供了丰富的图像处理和计算机视觉工具箱,可以方便地实现棋盘格角点检测算法。
本文将介绍基于Matlab的棋盘格角点检测算法的实现过程,包括图像的预处理、角点检测和角点提取等步骤。
实现过程:1. 图像预处理,首先,需要加载待处理的图像,并进行图像预处理,包括灰度化、去噪、边缘检测等操作。
这些操作可以借助Matlab提供的图像处理工具和函数来实现。
2. 角点检测,接下来,利用Matlab的计算机视觉工具箱中的角点检测算法,对预处理后的图像进行角点检测。
常用的角点检测算法包括Harris角点检测、Shi-Tomasi角点检测等,可以根据实际需求选择合适的算法进行检测。
3. 角点提取,最后,根据检测到的角点信息,利用Matlab提供的图像处理函数和工具,进行角点的提取和标记。
可以通过绘制角点的边界框或者在图像中标记角点的方式来展示检测结果。
结论:本文介绍了基于Matlab的棋盘格角点检测算法的实现过程,通过图像预处理、角点检测和角点提取等步骤,实现了对棋盘格角点的自动检测和提取。
这一算法可以广泛应用于相机标定、图像校正、三维重建等领域,为计算机视觉和图像处理提供了重要的技术支持。
采用环形模板的棋盘格角点检测

n e e d e d b y g r a y d i s t r i b u t i o n o f t h e l o c a l a r e a f o r t h e c h e s s b o a r d c o r n e r we r e a n a l y z e d ,a n d t h e p r o p e r —
格 角 点 检 测效 果 , 且运算速度快 , 误 差 小 。将 该 算 法 应 用 于 实 际 摄 像 机 标 定 , 结果显示重投影误差在 0 . 3 个像素 以内。
关 键 词: 棋 盘 格 角点 ; 角点检测 ; 环 形模 板 ; 摄 像 机 标 定
中图 分 类 号 : T P 3 9 1
采 用 环 形 模 板 的棋 盘 格 角 点检 测
储 琚 , 郭卢安政, 赵贵花
( 南昌航空大学 计算机视觉研 究所 , 江西 南 昌 3 3 0 0 6 3 )
摘 要: 曝 光 过 度 和镜 头 畸变 将 分 别 导 致 棋 盘 格 角 点 分 离 和 角 点 局 部 区 域 不 对 称 , 现 有 的 角 点 检 测 算 法 难 以准 确 提 取 棋 盘
文 献标 识码 : A
d o i : 1 0 . 3 7 8 8 / OP E . 2 0 1 3 2 1 0 1 . 0 1 8 9
Che s s b o a r d c o r n e r de t e c t i o n b a s e d o n c i r c u l a r t e m pl a t e
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
发 展起来 的 ,先使 用灰 度误差 平方 和来 构造 一个 误 一 小 时为边 界.
差 函数 ( , ),如 (1)式所 示 ,然 后通 过 微分 运 算
于是 Harris提 出角点 响应 函数 :
和 自相关 矩 阵进行 角 点的检 测.其 中 (“, )为窗 El
R :det(H)一atrace(H) =
(安 徽 工 程 大 学 检 测 技 术 与 节能 装 置 省 级 重 点 实验 室 ,安 徽 芜 湖 241000)
摘 要 :针 对 摄 像 机 标 定 中棋 盘 格 标 定 板 的 角点 检 测 ,给 出 了一 种 基 于 图像 像 素 点 分 布 的 角 点 检 测 算 法 .首 先 通 过 判
着 重要 的作 用 ,如何快 速准 确地 检测 出棋 盘格标 定 板 的角 点是 相机 标定 领 域 一 个 重 要 的研 究 课 题 之
∞( ,y)冲:H『 1 l ] 1 .
(4)
一 . 目前 检 测 角点 的方 法 大 致 可分 为 三 类 :(1)基 于 模板 的角 点检测 算 法 ,如 Lee J s和 Sun Y N提 出的小 波变换 模极 大 的角 点检 测 … ;(2)基 于边 缘
日称为 自相关 矩 阵 ,A… 和 A i 是 自相关 矩 阵的特 征 值.其 中 E(u, )是 一个 二次 型 函数 ,二 次型 函数
特 征 的角点 检测 算 法 ,如 H.T.Sheu和 W.C.Hu 的本质 就是 一个 椭 圆.椭 圆的扁 率 和尺 寸是 由 日的
使 用多 边形 近似便 捷链 ;(3)基 于 图像 灰度 信 息 特 征 A… 和 A 值 决定 的 ,椭 圆的方 向 由 日的特征
∑ ∞( ,y)[,( +“,Y+ )一,( ,y)r. (1)
将 ,(“, )进行 Taylor展 开 ,( + ,Y+ ) =,( ,Y)+ + +O(“ , )≈
高 斯滤 波运算 ,而 高斯 卷积会 产 生 圆角效应 对 角点 检 测极 为不 利 ,尤 其 是 在 检测 “ ”形 角 点 时 ,检 测 角 点 的位置 往往会 发 生偏移 .
USAN的典 型情 况 如 图 2所示 .可见 当圆形 模
( c 【轰 ] ) . c 3 板完全在 目标 区域里面时 USAN区域最大 ,如图 2 中的 A;当核 心在 边 缘 时 ,USAN区域 减 少一 半 ,如
收 稿 日期 :2015—11—20 作 者 简 介 :毕运 锋 (1990一 ),安 徽 歙 县 人 ,在 读 硕 士 ,主 要从 事 机 器 视 觉 摄 像 机 标 定 技 术 研 究
关 键 词 :摄 像 机 标 定 ;角 点检 测 ;棋 盘 格 ;对 角 线 矩 阵
中 图分 类号 :TN 911.73
文 献 标 志 码 :A
文 章 编 号 :1671—6132(2016)03—0025—04
0 引 言
定 义矩 阵 日
H ( ,y)E 叫L 左 。J 角点是图像的一个重要特征 ,在相机标定中有
断像 素 点 8邻 域 范 围 内相 似 点 个数 除去 平坦 区域 点 ,然后 根 据 棋 盘 格 图像 高度 对 称 的 特 性 提 取 对 角 线 上 矩 阵 ,通 过 此 矩 阵
来判 定 中 心 点是 否 为候 选 角 点 ,最 后 通 过 计 算 候 选 角 点 的 算 术 平 均 求取 最 终 角 点 坐 标 .
· 28·
南 阳师 范学 院 学 报
第 l5卷
摄 的 时候耗 时 相对 较少 ,而使 用鱼 眼镜 头拍 摄 时该 算 法耗 时 就大 于 Harris算 法和 本文 算法 .鱼 眼镜 头 在 实 际拍摄 过程 中具有更 加 广 阔的视 野 ,在 后续 标 定 过程 中的研 究意 义更 大 .
3 结 束 语
为解 决 Harris算 法 在 检 测 棋 盘 格 角 点 时 由于 高斯 卷积 会产 生 圆角效 应使 角点 的位置发 生偏 移 , 以及 SUSAN算 法检 测 棋 盘 格 角 点 时 产 生 漏 检 ,通 过判 断像 素点 8邻 域 范 围 内相 似 点个 数 除 去平 坦 区域 点 ,根据 棋盘 格 图像 高 度对 称 的特性 提取 对角 线上 矩 阵 ,通 过此 矩 阵来 判 定 中心点 是否 为候 选角 点 ,然 后 通过计 算 候选 角点 的算 术平 均求 取最 终角 点坐 标 .最后 通过 对 比实 验 ,表 明本 算 法 在 提 取棋 盘格 角 点时效 果更 好 .
第 15卷 第 3期 2 0 I 6年 3月
南阳师 范 学院 学报
Journal of Nanyang Normal University
V01.15 NO.3 M ar. 2016
一 种 新 型 棋 盘 格 角 点 检 测 算 法
毕运 锋 ,许 钢 ,江 娟 娟 ,吴 益 红 ,刘 亚 梅
发 生 的位置偏 移量 ,∞( ,Y)为窗 口函数 ,,( ,Y)为
A 0A1一O/(A0+ A1) ,Ot= 0.06.
(5)
图像灰度 .
Harris算 法 是 通 过 目标 像 素 的梯 度 来 判 断 该
E(“, ) =
像 素是 否为 角点 ,在实 际操 作过 程 中往 往 要先进 行
的 角 点 检 测 算 法 ,如 Harris 算 法 I s]、SUSAN 向量决 定.只有 当 日矩 阵 的 两 个 特 征 值 都 比较 大
算 法 .
时 ,在 程序 中设定 阈值 来 保 证 ,并 且 大 小 相 当时 对
Harris角点 检测 算法 是在 Moravec算法 基础 上 应 点才 为角 点 ,两 者 都 非 常 小 时为 平 坦 区域 ;一 大
1997年 Smith等 人 提 出 了 SUSAN算 法 ,具 体
,y)+[ ]『“1.
(2) 步 骤是 让一 个 37像 素 (图 1)的圆形 模板 在 目标 图
误 差 函 数 变 换 如 下 : E(u, ) =
像 上移 动 ,通 过计算 圆形模 板 中与核 心点 相似像 素 点个 数 (USAN)来判 断核 心点是 否 为角点 .