基于角点检测的图像形状特征提取方法
基于角点检测的图像形状特征提取方法
中盈分 类号t N 17 913 T .
基 于 角点检 测 的 图像 形状 特征 提 取 方 法
韦东兴 ,陈晓云 ,徐荣聪
( 福州大学数学与计算机科学学院,福州 3 0 0 ) 5 18
摘
要 :针对形状标记表示法可能遗漏轮廓曲线 上较重要边界 点的问题 ,提出一种基于角点检测的质 心距离标记法 。该方法采用轮廓跟踪
第 3 卷 第 4期 6
V L3 o 6
・
计
算
机
工
程
2100年 2月
Fe ua y 1 br r 20 0
No 4 .
C o pu e m t rEng ne rng i ei
图形 图街 处理 ・ I
文章编号:1 o-48 00 4.2 _0 文献标识码: 0 .32( l 0_ 2 - 3 o 2 ) _o 0- A
[ ywo d isaefaue faueet co ;h p i a r;i e e;o r on Ke r s hp tr;etr xr t n sa e g t et sr s cme it e ai sn u me i p
l 概 述
随着数字化和信息化技术 的快速发展 ,人们对图像的需
p pe r p s sa c n r i sa c inau e me h d b s d o o rp i t t c in. tu e o t u r cng t e h o t u , d p sc me oi a rp o o e e to d ditn e sg t r t o a e n c me o n e to I s sc n o r t i o g t ec n o r a o t o rp nt de a t d t c i n t o t i o e o n s n e r s n s h p i n t e wi e toi it n e e e t o b n c m r p i t,a d r p e e t o a s a e s g aur t c n r d d s a c .Ex rme t o I NN l s i c t n a d K- d i s h pe i ns n - ca sf ai n me o d i o c u trn h w fe t e e so h e me h d. l se g s o t e f c i n s ft t o i he v
Python技术实现图像特征提取与匹配的方法

Python技术实现图像特征提取与匹配的方法随着科技的不断进步,图像处理技术在各个领域得到了广泛应用。
图像特征提取与匹配是图像处理中的重要环节之一,它能够通过识别图像中的关键特征点,进行图像的检索、识别和对比。
Python作为一门功能强大的编程语言,提供了各种库和工具,可以方便地实现图像特征提取与匹配的方法。
一、图像特征提取图像特征是指在图像中具有独特而稳定的可视化特性,例如边缘、角点、颜色分布等。
图像特征提取的目的就是从图像中找到这些独特的特征点,以便后续的处理和分析。
1. 边缘检测边缘是图像中不同区域之间的分界线,是图像中的显著特征。
Python的OpenCV库提供了Sobel算子、Canny算子等用于边缘检测的函数,可以方便地实现边缘检测的过程。
2. 角点检测角点是图像中具有明显曲率或者弯曲的地方,是图像中的显著特征。
OpenCV 中的Harris角点检测算法和Shi-Tomasi角点检测算法提供了在Python中实现角点检测的函数。
3. SIFT和SURF特征提取SIFT(尺度不变特征变换)和SURF(加速稳健特征)是两种经典的特征提取算法,它们可以提取图像中的局部特征,并具有旋转、尺度不变性。
Python中的OpenCV库提供了SIFT和SURF算法的实现,可以方便地提取图像的特征。
二、图像特征匹配图像特征匹配是将两幅或多幅图像中的特征点进行对齐和匹配。
通过图像特征匹配,可以实现图像的检索、识别和对比,是图像处理中的重要环节。
1. 特征点描述在进行图像特征匹配之前,需要对特征点进行描述。
描述子是一种对特征点进行数学表示的方法,可以用于特征点的匹配和对比。
OpenCV中的SIFT和SURF 算法可以提取特征点的描述子。
2. 特征点匹配特征点匹配是将两个图像中的对应特征点连接起来,实现图像的对齐和匹配。
OpenCV中提供了FLANN(最近邻搜索)库,可以高效地实现特征点的匹配。
同时,还可以使用RANSAC算法进行特征点匹配的筛选和优化。
几种特征点提取算子的分析和比较
几种特征点提取算子的分析和比较特征点提取是计算机视觉中的一个重要任务,用于定位和描述图像中的重要局部特征,如角点、边缘、斑点等。
通过提取图像的特征点,可以实现目标识别、图像配准、图像检索等任务。
常用的特征点提取算子包括Harris角点检测算子、SIFT(尺度不变特征变换)算子、SURF(加速稳健特征)算子和FAST(快速特征点)算子。
下面对这几种算子进行分析和比较。
1. Harris角点检测算子:Harris角点检测算子是一种基于图像亮度变化的角点检测方法。
它通过计算图像每个像素的Harris响应函数来判断是否为角点。
Harris算子具有旋转不变性和尺度不变性的优点,但对于光照变化比较敏感。
2.SIFT算子:SIFT算子是一种局部特征描述算子,通过尺度空间的不变性和局部光度不变性来提取特征点。
SIFT算子对旋转、尺度、光照和仿射变化具有较好的不变性,适用于一些复杂场景下的目标识别和图像匹配任务。
3.SURF算子:SURF算子是一种基于SIFT算子的加速算法,它通过使用积分图像和快速Hessian矩阵的计算方法,提高了特征点提取的效率。
SURF算子在保持SIFT算子的不变性的基础上,显著提升了运算速度。
4.FAST算子:FAST算子是一种基于灰度阈值的快速特征点提取算子。
FAST算子速度快,适用于实时应用和大规模图像处理任务。
但FAST算子对于尺度和旋转变化较为敏感,不适用于复杂场景下的图像处理任务。
综上所述,不同的特征点提取算子适用于不同的图像处理任务。
如果要求高精度、高稳定性和较好的不变性,可以选择SIFT或SURF算子;如果要求处理速度较快,可以选择FAST算子。
实际应用中,可以根据具体需求选择适合的算子或者结合多个算子进行特征点提取,以达到更好的效果。
计算机视觉技术中的特征提取方法简介
计算机视觉技术中的特征提取方法简介计算机视觉技术是指通过计算机模仿人类的视觉系统,使计算机能够理解和解释视觉信息,并进行相关的决策和处理。
其中,特征提取是计算机视觉中的一个重要环节,它通过从图像或视频中提取有用、有区分度的特征,为后续的目标检测、图像识别、物体跟踪等任务提供基础。
在计算机视觉中,特征提取方法众多,可以分为传统的特征提取方法和基于深度学习的特征提取方法。
在传统的特征提取方法中,常见的有结构特征、颜色特征、纹理特征和形状特征等。
下面将对一些常用的特征提取方法进行简要介绍。
1. 结构特征结构特征主要关注图像中的物体边界、角点和区域等结构信息。
常见的结构特征包括边缘检测、角点检测和轮廓提取等。
边缘检测使用梯度信息来识别图像中的边界,常用的方法有Sobel算子、Canny算子和Laplacian算子等。
角点检测主要用于寻找图像中的角点,常用的方法有Harris角点检测和Shi-Tomasi角点检测等。
轮廓提取则是通过分析图像中的亮度变化来提取物体的外形轮廓。
2. 颜色特征颜色特征是指利用图像中的颜色信息来进行特征提取。
颜色特征在计算机视觉中被广泛应用,尤其在图像检索和图像分割等任务中。
常见的颜色特征包括颜色直方图、颜色矩和颜色空间等。
颜色直方图统计了图像中各个颜色的分布情况,常用的颜色空间有RGB、HSV和Lab等。
颜色矩则是用于描述颜色的一种统计特征,常见的颜色矩有色调矩和灰度矩等。
3. 纹理特征纹理特征用于描述图像中的纹理信息,可以帮助区分不同的纹理结构和纹理方向等。
常见的纹理特征包括灰度共生矩阵(GLCM)、局部二值模式(LBP)和高斯过程等。
灰度共生矩阵通过统计图像中不同位置像素间的灰度级别和空间关系来描述图像的纹理特征。
局部二值模式则是通过比较像素与周围像素的灰度级别来提取纹理特征。
高斯过程是一种基于统计模型的纹理特征提取方法,通过建立图像中像素间的高斯相似性来进行纹理分析。
4. 形状特征形状特征是指描述对象外形几何属性的特征。
基于角点特征的图像检索新方法
基于角点特征的图像检索新方法丁军娣;董燕;户卫东【摘要】Most of corner-based image retrieval methods are brought forth based on corner colour features,but do not consider the prominence ofthe feature.In view of this,we make experimental analyses on a variety of features of the corner points,and propose a novel algorithm by using two more prominent features among them,which retrieves images based on corner features.The algorithm constructs the generalised gray level co-occurrence matrix of corner points as the local texture feature;at the same time it extracts Hu invariant moments of the area around the corner point as the local shape feature.Finally,it makes weighted operation on texture feature and shape feature,and uses the weighted result as the retrieval feature to implement retrieval.Experimental result shows that while selecting the appropriate weight, the retrieval can achieve a better resultby combining the two features of corner points.%多数基于角点的图像检索方法都是基于角点颜色特征提出的,并没有考虑特征显著性。
角点特征提取

角点特征提取角点特征是图像中最重要的特征之一。
它在计算机视觉和图像处理领域具有广泛的应用。
角点特征能够用来进行图像匹配、目标跟踪、图像分割等任务,具有很高的应用价值。
什么是角点特征?角点特征是指在图像中具有明显的角落或者边缘的点。
这些点通常是图像中灰度值发生明显变化的地方,例如物体边缘、拐角等。
对于角点特征,其周围的像素也会是角点或者接近角点的像素,这使得它们非常适合作为图像匹配的特征点。
角点特征是图像特征中最具有鲁棒性和稳定性的一种。
与其他特征点不同,角点特征不受图像尺度和旋转的影响。
这意味着无论图像发生多少变化,角点特征都能被准确、稳定地检测出来。
这种特性使得角点特征在目标跟踪、图像匹配等领域中得到广泛应用。
角点特征有很多种检测方法,其中比较常用的有如下几种:1. Harris角点检测Harris角点检测是一种常用的角点检测方法。
该方法通过计算图像每个像素点的邻域之间的差异,得到角点响应值,从而实现角点的检测。
该方法简单、高效,并且具有旋转和缩放不变性,稳定性良好。
2. Shi-Tomasi角点检测Shi-Tomasi角点检测是Harris角点检测的一种改进方法,主要是通过改变角点响应值的计算方法来实现更好的角点检测。
该方法计算图像每个像素点的特征值,从中选取最小的一组,以此作为每个像素点的角点响应值。
该方法检测出来的角点数量比Harris角点检测要少,但是能够提取出更准确的角点特征。
3. FAST角点检测FAST角点检测是一种非常快速的角点检测算法。
该算法通过比较像素点与其邻域之间的灰度差异,判断该像素点是否为角点,从而实现角点的检测。
该算法速度非常快,但是对于噪声较大的图像,容易产生误检和漏检。
总结角点特征是图像特征中非常重要的一种。
它具有旋转、缩放不变性,鲁棒性强,可以用于目标跟踪、图像匹配等各种图像处理任务。
通过不同的角点检测算法,可以准确、快速地检测出图像中的角点特征,从而实现更好的图像处理效果。
图像中角点提取与匹配算法

图像中角点提取与匹配算法角点提取与匹配算法是计算机视觉领域中的一项重要技术,用于在图像中寻找具有明显角度变化的特征点,并将这些特征点进行匹配。
这些算法在很多应用中都起到了关键作用,如图像配准、目标跟踪、三维重建等。
角点是图像中具有明显角度变化的点,它们在不同尺度和旋转下具有稳定性,因此可以用来作为图像的特征点。
在角点提取算法中,常用的方法有Harris角点检测算法、Shi-Tomasi角点检测算法、FAST角点检测算法等。
Harris角点检测算法是最早提出的角点检测算法之一,它通过计算图像中每个像素点周围区域的灰度变化来判断该点是否为角点。
具体来说,该算法计算每个像素点的特征值,通过特征值的大小来确定角点。
如果特征值较大,则该点为角点;反之,则该点为平坦区域或边缘。
Shi-Tomasi角点检测算法是对Harris角点检测算法的改进,它使用特征值中较小的一个来表示角点的稳定性,从而提高了检测的准确性和稳定性。
该算法首先计算每个像素点的特征值,然后选择特征值较小的一部分像素点作为角点。
FAST角点检测算法是一种高效的角点检测算法,它通过比较像素点周围的相邻像素点的灰度值来判断该点是否为角点。
该算法通过快速地检测像素点的灰度值变化来提高检测的速度,同时保持了较高的准确性。
在角点匹配算法中,常用的方法有基于特征描述子的匹配算法,如SIFT(尺度不变特征变换)算法、SURF(加速稳健特征)算法、ORB (Oriented FAST and Rotated BRIEF)算法等。
SIFT算法是一种基于尺度不变特征变换的特征描述子算法,它通过检测图像中的关键点,并计算每个关键点周围区域的特征描述子。
这些特征描述子具有尺度不变性和旋转不变性,因此可以用来进行图像匹配。
SURF算法是一种加速稳健特征算法,它通过使用快速哈尔小波变换来计算图像中的特征点,并使用加速积分图像来加速特征点的计算。
这些特征点具有尺度不变性和旋转不变性,可以用来进行图像匹配。
计算机视觉中的角点提取与描述技术

计算机视觉中的角点提取与描述技术角点是指在图像或视觉场景中具有明显变化或特征的位置。
在计算机视觉中,角点提取与描述技术是一种重要的图像处理方法,用于检测和描述图像中的角点。
本文将介绍计算机视觉中的角点提取与描述技术的原理、方法和应用。
一、角点提取技术的原理和方法1. Harris角点检测算法Harris角点检测算法是最早的角点检测算法之一。
它基于图像灰度在不同方向上的变化,通过计算像素点周围的灰度变化来判断是否为角点。
该算法通过计算图像中每个像素的梯度矩阵,再计算矩阵的特征值来判断是否为角点。
2. Shi-Tomasi角点检测算法Shi-Tomasi角点检测算法是对Harris算法的改进。
它使用了特征值的最小值来判断像素是否为角点,相比于Harris算法更稳定且具有更好的鲁棒性。
该算法计算了图像中每个像素的特征点得分,然后选择得分最高的像素作为角点。
3. FAST角点检测算法FAST角点检测算法是一种高效的角点检测算法。
它通过比较周围像素的灰度值来检测角点。
该算法快速地选择候选角点并进行特征点检测,具有较快的速度和较好的鲁棒性。
4. 角点描述算法角点的描述是指将检测到的角点进行特征描述,以便后续的匹配和识别。
常用的角点描述算法包括SIFT(Scale-Invariant Feature Transform)、SURF(Speeded Up Robust Features)和ORB(Oriented FAST and Rotated BRIEF)等。
二、角点提取与描述技术的应用1. 物体识别与跟踪角点提取与描述技术在物体识别与跟踪中发挥了重要作用。
通过提取图像中的角点,并进行描述和匹配,可以实现对物体的识别和跟踪。
例如,在机器人导航中,可以利用角点提取与描述技术来实现对环境中的障碍物进行识别和跟踪。
2. 图像配准与拼接在图像拼接和图像配准中,角点提取与描述技术也是关键的步骤。
通过提取图像中的角点,并进行特征描述和匹配,可以对多幅图像进行配准和拼接。
ORB特征提取详解

ORB特征提取详解ORB(Oriented FAST and Rotated BRIEF)是一种用于特征提取和匹配的计算机视觉算法,由Ethan Rublee等人于2024年提出。
它通过改进FAST(Features from Accelerated Segment Test)角点检测器和BRIEF (Binary Robust Independent Elementary Features)描述子来提取关键点和特征描述子,具有旋转不变性和鲁棒性。
首先,ORB算法通过对图像进行尺度空间金字塔的构建,检测图像中的特征点。
ORB采用FAST角点检测器,能够快速而稳定地检测图像中的角点。
FAST角点检测器通过比较像素点与周围几个像素点的强度差异,来确定是否为角点。
为了提高检测精度和速度,ORB算法通过组合使用像素灰度值、像素对齐性和像素边界响应等策略来进一步优化FAST角点检测器。
然后,ORB算法对每个检测到的特征点计算其特征描述子。
ORB采用了BRIEF描述子,该描述子基于图像的局部二进制模式(LBP)。
BRIEF描述子通过比较特定相对位置的像素点,生成一个二进制编码,用于表示该特征点周围的特征。
通过使用LBP进行编码,BRIEF描述子能够提取出图像中的边缘和纹理等特征信息,从而实现特征描述的鲁棒性。
此外,ORB算法还引入了方向估计的步骤,以提高特征匹配的准确性和鲁棒性。
ORB通过计算特征点周围像素的灰度梯度,来估计特征点的主方向。
这使得ORB算法具有旋转不变性,能够匹配具有不同旋转角度的特征点。
对于有重叠的特征点,ORB还使用了一种图像块划分的方法来避免特征点之间的冗余。
最后,ORB算法通过几何校验和RANdom SAmple Consensus(RANSAC)算法来进行特征匹配和滤除外点。
通过计算两幅图像中特征点之间的距离和方向差异,并进行投影变换计算,ORB能够找到两幅图像中最匹配的特征点对,并剔除不一致的特征点。
无人机航拍图像处理中的特征提取与目标检测算法研究

无人机航拍图像处理中的特征提取与目标检测算法研究一、引言随着无人机技术的迅猛发展,无人机航拍已经成为现代航拍领域的重要手段之一。
无人机航拍图像的处理涉及到诸多领域,其中最为重要的就是特征提取与目标检测算法。
本文将对无人机航拍图像处理中的特征提取与目标检测算法进行研究。
二、特征提取算法特征提取是无人机航拍图像处理中的关键环节,通过提取出图像中的特征信息,可以为后续的目标检测算法提供有效的输入。
常用的特征提取算法包括边缘检测、角点检测和纹理分析等。
1. 边缘检测边缘检测是图像处理中最基础的特征提取方法之一,其原理是通过检测图像中不连续的灰度变化来定位物体的边界。
常用的边缘检测算法包括Sobel算子、Canny算子和Laplacian算子等。
2. 角点检测角点检测是指在图像中寻找具有明显角度的像素点,这些像素点常常代表了物体的特殊结构。
常用的角点检测算法有Harris算法、Shi-Tomasi算法和FAST算法等。
3. 纹理分析纹理分析是指对图像中的纹理信息进行提取和描述的过程。
常用的纹理分析算法包括灰度共生矩阵法、Gabor滤波器法和局部二值模式法等。
三、目标检测算法特征提取完成后,接下来就是对提取出的特征进行目标检测。
目标检测算法可以分为传统方法和深度学习方法两类。
1. 传统方法传统的目标检测方法主要包括基于颜色、形状、纹理和背景建模等的算法。
其中,基于颜色的目标检测常用的算法有HSV模型、区域生长和基于颜色直方图的方法等;基于纹理的目标检测常用的算法有Gabor滤波器和灰度共生矩阵等;而基于形状的目标检测则常使用边缘和轮廓信息。
2. 深度学习方法深度学习方法近年来在目标检测领域取得了明显的进展,主要表现在基于卷积神经网络(CNN)的算法。
这些算法将图像的特征提取和目标检测过程融合在一起,通过对大规模数据集的训练来提高检测的准确性和鲁棒性。
常用的深度学习目标检测算法有Faster R-CNN、YOLO和SSD等。
图像特征提取及描述算法分析
图像特征提取及描述算法分析图像特征提取及描述算法是计算机视觉领域的核心内容之一,其在图像处理、模式识别和计算机视觉任务中扮演着重要的角色。
本文将分析一些常用的图像特征提取及描述算法,包括边缘检测、角点检测、尺度不变特征变换(SIFT)和高级表观算子(HOG),以及它们在实际应用中的优缺点。
边缘检测是图像处理中常用的特征提取方法之一。
边缘是图像中灰度变化最明显的地方,通常包含了物体的轮廓和纹理信息。
常用的边缘检测算法有Sobel算子、Prewitt算子和Canny边缘检测算法。
Sobel算子和Prewitt算子是基于局部差分的算法,通过计算像素点邻域内灰度值的差异来检测边缘。
Canny边缘检测算法在Sobel算子的基础上添加了非最大抑制和双阈值处理,能够在减少噪声的同时保留重要的边缘信息。
边缘检测算法在许多图像处理和计算机视觉任务中都有广泛的应用,例如目标检测、图像分割和图像识别等。
角点检测是另一种常用的图像特征提取算法,它主要用于寻找图像中的角点或感兴趣点。
角点是图像中两条或多条边缘相交的地方,通常具有良好的鲁棒性和唯一性。
常用的角点检测算法有SIFT算法、Harris角点检测算法和FAST角点检测算法。
SIFT算法通过在不同尺度空间上进行高斯模糊和建立尺度空间极值点来寻找图像中的关键点。
Harris角点检测算法基于图像灰度的变化率来检测角点,通过计算图像的梯度和结构矩阵的特征值来判断像素点是否为角点。
FAST角点检测算法则是通过快速的像素比较来寻找图像中的角点。
角点检测算法在图像配准、目标跟踪和三维重建等领域有广泛的应用。
尺度不变特征变换(SIFT)是一种用于图像特征提取和描述的经典算法。
SIFT 算法通过在不同尺度空间上构建高斯金字塔和相对梯度直方图来提取图像的局部不变特征。
SIFT特征具有旋转不变性和尺度不变性,能够在不同角度和尺度下描述同一物体的特征。
SIFT算法在目标识别、图像匹配和三维重建等领域有广泛的应用。
特征提取方法
特征提取方法特征提取是图像处理、模式识别、计算机视觉等领域中的重要问题,它是指从原始数据中提取出具有代表性、区分性的特征,用以描述目标对象的属性和特性。
特征提取方法的选择直接影响到后续的数据分析和模式识别效果,因此在实际应用中具有重要意义。
一、传统特征提取方法。
1. 边缘检测。
边缘是图像中灰度变化明显的地方,边缘检测是图像处理中常用的特征提取方法之一。
经典的边缘检测算子包括Sobel、Prewitt、Roberts等,它们通过计算图像灰度的一阶导数来检测图像中的边缘。
2. 角点检测。
角点是图像中具有显著角度变化的点,角点检测是另一种常用的特征提取方法。
Harris角点检测算法是其中的经典代表,它通过计算图像局部区域的灰度变化来检测角点。
3. 尺度不变特征变换(SIFT)。
SIFT是一种基于局部特征的描述符,它具有尺度不变性和旋转不变性等优点,被广泛应用于图像配准、目标识别等领域。
二、深度学习特征提取方法。
1. 卷积神经网络(CNN)。
CNN是一种专门用于处理具有类似网格结构的数据的深度学习模型,它通过卷积层和池化层来提取图像的特征,并在此基础上实现图像分类、目标检测等任务。
2. 循环神经网络(RNN)。
RNN是一种适用于序列数据的深度学习模型,它可以用于提取文本、语音等序列数据的特征,广泛应用于自然语言处理、语音识别等领域。
3. 自编码器(Autoencoder)。
自编码器是一种无监督学习的深度学习模型,它可以通过学习数据的压缩表示来实现特征提取,被广泛应用于图像去噪、特征重建等任务。
三、特征提取方法的选择。
在实际应用中,特征提取方法的选择需要根据具体的问题和数据特点来进行。
传统的特征提取方法在一些简单场景下仍然具有优势,而深度学习方法则在复杂场景和大规模数据下表现更为出色。
因此,我们需要根据实际情况灵活选择特征提取方法,以达到最佳的数据分析和模式识别效果。
总结。
特征提取是图像处理、模式识别等领域中的重要问题,传统的特征提取方法包括边缘检测、角点检测、SIFT等,而深度学习方法则包括CNN、RNN、自编码器等。
orb特征点提取算法

orb特征点提取算法
ORB(Oriented FAST and Rotated BRIEF)是一种特征点提取算法,它结合了FAST角点检测器和BRIEF描述子。
ORB算法的主要步骤如下:
1. FAST角点检测:首先,使用FAST角点检测器在图像中检测出候选的角点。
FAST角点检测器是一种高效的角点检测算法,它通过比较像素点与其周围像素点的灰度值来判断是否为角点。
2. 特征点筛选:根据一定的筛选准则,对检测出的候选角点进行筛选,保留一部分具有良好特征的角点作为ORB特征点。
3. 方向分配:对于每个保留的特征点,根据周围像素点的灰度值来计算其方向。
这样可以使特征点在旋转变换后具有不变性。
4. BRIEF描述子计算:对于每个特征点,使用BRIEF描述子来描述其局部特征。
BRIEF描述子是一种二进制描述子,它通过比较特征点周围的像素点对的灰度值来生成一个二进制编码。
5. 特征点匹配:根据特征点的描述子,使用特征匹配算法(如汉明距离)来找到两幅图像中具有相似特征的特征点。
通过以上步骤,ORB算法可以提取出具有良好特征的特征点,并且能够在一定程度上具有旋转不变性和尺度不变性。
因此,ORB算法在图像处理和计算机视觉领域中得到了广泛应用。
计算机视觉中的特征提取技术方法

计算机视觉中的特征提取技术方法计算机视觉是现代科技中的一个重要分支,它让计算机能够模仿人类视觉系统,从而实现感知、识别、分析等一系列视觉相关的任务。
在计算机视觉中,特征提取是一项基础技术,它是将图像中重要的信息提取出来的过程,是图像处理和分析的关键步骤之一。
在本文中,将详细介绍计算机视觉中的特征提取技术方法,包括传统的方法和近年来广泛应用的深度学习方法。
一、传统特征提取方法1、边缘检测边缘是图像中最基本的特征之一,可以通过检测图像中相邻的像素之间的强度变化来识别。
传统的边缘检测方法包括Sobel、Canny和Laplacian等,其中Sobel方法使用Sobel算子来检测垂直和水平方向的边缘,Canny算法则是将非极大值抑制和双阈值处理结合起来,可以得到更为准确的边缘。
2、角点检测角点是指在图像中两条边缘交汇的点,其具有高度稳定性和可重复性,因此在很多应用场景下,角点检测比较有用。
常见的角点检测方法包括Harris、Shi-Tomasi和FAST等,其中Harris方法通过对图像像素灰度值的偏导数进行计算,来判断像素点是否为角点;FAST算法则是通过计算像素周围的灰度变化来选出特征点。
3、尺度空间分析一张图像的尺度空间包括了多个尺度下的图像,不同尺度下的图像有着不同的特征和表示方式。
尺度空间分析旨在在多个尺度下找到特征点,常见的方法有尺度空间极值检测、高斯金字塔和拉普拉斯金字塔等。
二、深度学习特征提取方法1、卷积神经网络(CNN)近年来深度学习在计算机视觉领域中的应用越来越广泛。
卷积神经网络是其中一种特别受欢迎的模型,它可以从原始图像中直接学习特征,极大地简化了图像处理过程。
通过在多层神经元之间共享参数,CNN可以自动学习出图像中的特定特征,这些特征可以用于分类、目标检测、图像搜索等任务。
2、循环神经网络(RNN)RNN是一种可以捕捉序列信息的深度学习模型,在计算机视觉领域中也得到了广泛应用。
在图像描述生成、视频理解等任务中,RNN模型可以将输入序列映射为输出序列,从而实现目标识别和描述的功能。
基于几何特征的特征提取方法

基于几何特征的特征提取方法基于几何特征的特征提取方法是从图像或物体的几何形状信息中提取有意义的特征,用于描述和区分不同的图像或物体。
这些特征可以在计算机视觉、模式识别、图像处理等领域中发挥关键作用。
以下是一些常见的基于几何特征的特征提取方法:1.轮廓特征:•轮廓是物体边缘的描述。
通过分析轮廓的形状、曲率等特征,可以提取出一系列的几何特征。
例如,可以计算轮廓的长度、宽度、面积等。
2.形状因子:•形状因子用于度量物体的形状。
常见的形状因子包括圆形度、矩形度等,用于描述物体形状的圆形程度或接近矩形的程度。
3.角点检测:•角点通常是图像中显著的几何结构点,例如拐角或交叉点。
常见的角点检测算法包括Harris角点检测和Shi-Tomasi角点检测。
检测到的角点可以用作特征点,用于匹配和识别。
4.骨架化:•骨架是物体的主要结构,通过骨架化可以提取出物体的骨架特征。
骨架化算法通常用于细化图像或减少形状的复杂性。
5.凸壳:•凸壳是包围物体的最小凸多边形。
通过计算凸壳的特征,如凸壳的面积、周长等,可以提取出物体的形状信息。
6.边缘直方图:•边缘直方图描述了图像中各个方向上的边缘分布情况。
通过分析边缘直方图,可以得到物体的边缘特征。
7.拓扑特征:•拓扑学描述了空间结构的连接关系。
通过分析物体的拓扑结构,可以提取出拓扑特征,如孔的数量、连通性等。
这些方法通常结合使用,根据具体问题的要求选择合适的特征提取方法。
在实际应用中,选择合适的几何特征提取方法对于图像分析和物体识别等任务非常重要。
halcon机器视觉算法原理

halcon机器视觉算法原理Halcon机器视觉算法原理Halcon是一种基于图像处理的机器视觉软件,它广泛应用于工业自动化领域。
Halcon机器视觉算法的原理主要包括图像预处理、特征提取和模式匹配三个步骤。
1. 图像预处理图像预处理是Halcon算法的第一步,目的是对输入的图像进行去噪、增强和边缘检测等操作,以提高后续步骤的准确性和稳定性。
常见的图像预处理方法包括均值滤波、中值滤波、高斯滤波和直方图均衡化等。
2. 特征提取特征提取是Halcon算法的核心步骤,它通过从图像中提取出具有代表性的特征来描述目标物体的形状、纹理和颜色等特征。
常见的特征提取方法包括边缘检测、角点检测、轮廓提取和颜色直方图等。
边缘检测是一种常用的特征提取方法,它通过识别图像中的边缘信息来描述目标物体的形状。
常见的边缘检测算法包括Sobel算子、Prewitt算子和Canny算子等。
角点检测是一种特殊的特征提取方法,它通过识别图像中的角点来描述目标物体的形状和纹理。
常见的角点检测算法包括Harris角点检测算法和Shi-Tomasi角点检测算法等。
轮廓提取是一种常用的特征提取方法,它通过识别图像中的轮廓信息来描述目标物体的形状。
常见的轮廓提取算法包括边缘跟踪算法和形态学轮廓提取算法等。
颜色直方图是一种常用的特征提取方法,它通过统计图像中各个像素的颜色分布来描述目标物体的颜色特征。
常见的颜色直方图算法包括灰度直方图、RGB直方图和HSV直方图等。
3. 模式匹配模式匹配是Halcon算法的最后一步,它通过将提取得到的特征与预先定义的模板进行匹配,从而实现对目标物体的识别和定位。
常见的模式匹配方法包括模板匹配、形状匹配和颜色匹配等。
模板匹配是一种常用的模式匹配方法,它通过将目标物体的特征与模板进行比较,找到最佳匹配的位置。
常见的模板匹配算法包括灰度相关匹配、形态学匹配和尺度不变特征变换(SIFT)等。
形状匹配是一种特殊的模式匹配方法,它通过将目标物体的形状与模板进行比较,找到最佳匹配的位置。
棋盘格角点提取
棋盘格角点提取
棋盘格角点提取是一种常用的图像处理技术,主要用于计算机视觉、机器人视觉等领域。
棋盘格角点提取的原理是利用相机拍摄棋盘格图像时,棋盘格中的直线与边缘等形状特征,通过计算机算法将其转化为坐标系中的角点,从而实现对图像的测量、跟踪、校准等操作。
棋盘格角点提取主要包括以下几个步骤:
1. 棋盘格图像采集:利用相机或者其他成像设备拍摄棋盘格图像。
2. 图像预处理:对采集到的棋盘格图像进行预处理,包括去噪、平滑、灰度化、二值化等处理。
3. 棋盘格角点检测:使用角点检测算法,对预处理后的图像进行处理,从而得到棋盘格图像中的角点坐标。
4. 角点坐标校准:根据棋盘格的实际尺寸,对角点坐标进行校准,得到真实世界坐标系下的角点坐标。
5. 应用:利用棋盘格角点提取技术,可以实现对图像的校准、测量、跟踪、标定等操作,广泛应用于计算机视觉、机器人视觉等领域。
总之,棋盘格角点提取是一种重要的图像处理技术,可以帮助人们实现对图像的快速、准确的测量和处理。
- 1 -。
计算机图像处理中的特征提取与图像分割算法

计算机图像处理中的特征提取与图像分割算法计算机图像处理是人工智能领域的一个重要分支,涉及到对图像进行分析、处理和理解的技术和方法。
在图像处理中,特征提取和图像分割算法是两个关键的步骤。
本文将介绍计算机图像处理中的特征提取和图像分割算法,并讨论它们的应用和局限性。
一、特征提取特征提取是指从原始图像中选择并提取出能够描述图像内容的关键信息。
计算机视觉领域中常用的特征包括边缘、角点、纹理、颜色等。
下面将介绍几种常见的特征提取算法。
1. 边缘检测算法边缘是图像中灰度或颜色变化显著的区域,常用于图像分割和对象检测。
边缘检测算法可以通过检测图像中灰度或颜色的变化来提取出边缘信息。
常用的边缘检测算法包括Sobel算子、Canny算子等。
2. 角点检测算法角点是图像中具有显著角度变化的点,常用于图像匹配和物体追踪。
角点检测算法可以通过检测图像中灰度或颜色的变化来提取出角点信息。
常用的角点检测算法包括Harris角点检测算法、FAST角点检测算法等。
3. 纹理分析算法纹理是图像中的重要特征,用于描述图像中的细节信息。
纹理分析算法可以通过提取图像中的统计特征、频域特征或结构特征等来描述图像的纹理信息。
常用的纹理分析算法包括灰度共生矩阵、小波变换等。
4. 颜色特征提取算法颜色是图像中的一种重要视觉特征,可以用于图像分割、物体识别等任务。
颜色特征提取算法可以通过提取图像中的色彩分布、颜色矩等来描述图像的颜色信息。
常用的颜色特征提取算法包括颜色直方图、颜色矩等。
二、图像分割图像分割是指将图像划分为若干个具有独立语意的区域的过程。
图像分割在计算机视觉和图像处理领域有着广泛的应用,如目标检测、图像增强和医学图像分析等。
1. 基于阈值的分割算法基于阈值的分割算法是一种简单而有效的图像分割方法。
该方法根据像素值的灰度或颜色与设定的阈值进行比较,将图像分割为前景和背景两部分。
常用的基于阈值的分割算法包括全局阈值法、自适应阈值法等。
计算机视觉技术中的特征提取与描述方法
计算机视觉技术中的特征提取与描述方法计算机视觉是人工智能领域的重要分支,旨在使计算机能够理解和解释图像或视频中的内容。
特征提取与描述是计算机视觉中的重要环节,它们可以帮助计算机识别图像中的关键信息,并将其转化为数学表示,为后续的图像处理和分析提供基础。
在计算机视觉中,特征提取是指从原始图像数据中提取出具有代表性的特征,这些特征可以反映图像中的不同属性或结构。
特征可以是像素值、边缘、纹理、颜色等,而特征提取算法则是将这些特征从图像中提取出来的方法。
常见的特征提取方法包括边缘检测、角点检测和尺度不变特征变换(SIFT)。
边缘检测方法可以通过检测图像中亮度变化的区域来提取边缘特征。
角点检测则是通过检测图像中突出的角点位置来提取角点特征。
SIFT是一种用于检测图像中的局部不变特征的方法,它通过对图像进行多尺度、多方向的高斯滤波和关键点检测,然后计算每个关键点的局部描述子。
除了特征提取,特征描述也是计算机视觉中的关键步骤。
特征描述是指将提取到的特征转换为数学表达,以便计算机能够理解和比较不同特征之间的相似度。
常见的特征描述方法包括方向直方图(HOG)和局部二值模式(LBP)。
HOG是一种用于描述图像中局部梯度信息的方法,它将图像分割为小的局部区域,并计算每个区域内梯度的大小和方向。
然后,HOG将这些局部梯度汇总为一个全局的特征向量,用于表示整个图像。
LBP是一种用于描述图像中纹理信息的方法,它将图像中的每个像素与其邻域像素进行比较,并根据比较结果生成一个二进制编码。
最后,LBP将这些二进制编码组合成一个特征向量,用于表示整个图像。
除了上述常见的特征提取与描述方法,近年来深度学习技术也在计算机视觉中得到了广泛应用。
深度学习通过学习大量图像数据中的特征,并通过网络结构的组合和优化来提取和描述图像中的特征。
卷积神经网络(CNN)是深度学习中最常用的模型之一,它通过多层卷积和池化操作来提取图像中的特征。
CNN可以自动学习出适合任务的特征表达,使得特征提取和描述可以在同一个网络中完成。
基于角点特征的提取算法比较研究

基于角点特征的提取算法比较研究随着计算机视觉和图像处理领域的快速发展,基于角点特征的提取算法成为了其中一个研究热点。
在处理图像和视频的过程中,角点是一种表现出明显的边界变化的像素,通常被认为是图像中最重要的特征点之一。
本文将对几种常见的基于角点特征的提取算法进行比较研究,分析它们各自的优缺点和适用场景,以期为读者提供一些有价值的参考。
1. Harris角点检测算法Harris角点检测算法是一种基于像素梯度局部变化率的方法,最初由Chris Harris和Mike Stephens于1988年提出。
该算法计算了图像中每个像素点的局部对极性(local polarities),来确定角点的位置。
其基本思想是利用一个2x2的方形窗来计算每个像素点的局部二阶导数矩阵M,再用特征值判别式来度量这个矩阵对应的特征向量的重要性,最后将得分高的像素点作为角点。
该算法以高效简单和检测效果优秀而著称,在许多计算机视觉应用中得到广泛应用,如目标跟踪、图像匹配、三维建模等。
但是,它在特定情况下容易发生误检或漏检,如受噪声干扰或存在角点被覆盖的情况等。
2. Shi-Tomasi角点检测算法Shi-Tomasi角点检测算法是基于Harris算法的一种改进方法,它是由J. Shi和C. Tomasi于1994年提出的。
与Harris算法不同的是,Shi-Tomasi算法使用了一个新的得分函数,即最小的特征值,来度量一个像素点是否为角点。
这是因为,最小的特征值比其他特征值更容易受到噪声的影响,因此更适合用于角点检测。
Shi-Tomasi算法与Harris算法相比,更加鲁棒,能够在更多噪声情况下检测到角点。
但是,它在计算速度方面略逊于Harris算法,并且在某些情况下仍然容易发生误检或漏检。
3. FAST算法各种基于像素梯度的角点检测算法通常较为耗时。
FAST算法是一种基于像素灰度值的角点检测算法,由Edward Rosten和Tom Drummond于2006年提出。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 概述
随着数字化和信息化技术的快速发展,人们对图像的需 求量越来越大,图像被广泛应用于工业、农业、医学等领域。 如何从海量的图像信息中有效获取有用信息成为近年来的一 个研究热点,主要包括图像检索、图像分类和图像聚类等, 而其中的关键问题是如何进行图像特征提取,并有效地描述 图像信息。
图像的特征主要有颜色特征、纹理特征和形状特征。形 状特征是图像的一个重要视觉特征,它对位移、旋转和尺度 变换具有不变性。在辨别物体时,人们经常根据物体形状来 区分各个物体,因此,对形状特征的研究很有必要。
在基于内容的图像检索技术中,形状特征的描述分为基 于边界与基于区域 2 类方法:基于边界的形状特征主要有周 长、主轴、曲率、形状数、形状标记、傅里叶描述方法、小 波描述方法、尺度空间等;基于区域的形状特征有面积、重 心、欧拉数、偏心率、几何矩、Legendre 矩、Zernike 矩、广 义傅里叶描述符等[1-2]。
图 3 轮廓曲线
3 轮廓特征的时间序列表示
形状标记是一种基于边界的形状特征描述,是边界的一 维函数表示,它将二维边界用一个一维函数或时间序列来描 述。产生形状标记的方法主要有质心距离、复坐标、弧长、 累积角度、曲率、面积函数标记等[4],本文采用质心距离标 记法。 3.1 质心距离标记
质心距离是轮廓边界点到质心的距离。质心距离标记法 的主要步骤如下:(1)求出轮廓曲线的质心。(2)取定圆心角 α , 将轮廓等分为 n 份( n = 360 α ),轮廓上的 n 个等分点将被用 于产生质心距离标记,如图 4 所示。(3)计算这 n 个边界点与 质心的距离。文献[4]给出其数学表达式:
第 36 卷 第 4 期 Vol.36 No.4 ·图形图像处理·
计算机工程 Computer Engineering
文章编号:1000—3428(2010)04—0220—03
文献标识码:A
2010 年 2 月 February 2010
中图分类号:TN911.73
基于角点检测的图像形状特征提取方法
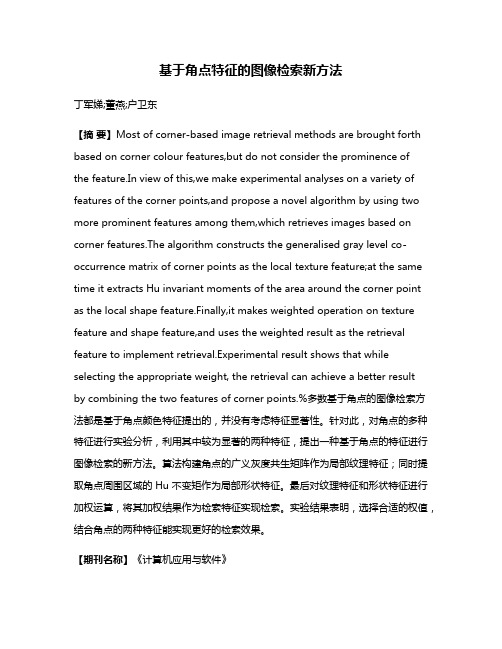
(b)基于角点检测的质心距离标记法 图 5 2 种方法的轮廓特征序列化表示
4 实验及结果分析
4.1 实验数据 本文实验的原始图像为叶子数据集[6],它由 6 个类构成,
共 442 张图像。该数据集中各类样本图像如图 6 所示。从每 个类中随机抽取 30 张图像,共 180 张图像构成实验的图像数 据集。经基于角点检测的质心距离标记和一般的质心距离标 记后得到的时序序列数据集分别记为 Leaf2seq1, Leaf2seq2, 如表 1 所示。
∑
i=1,2,
,k
pi
,
pi = mi ni ,其中, k 为簇的
个数; pi , ni 和 mi 分别为第 i 个簇的聚类精度、样本总数和
簇中主导类(簇中样本个数最多的类)的样本个数。
在最近邻分类实验中, Leaf2seq1 的分类正确率为 0.70,
大于 Leaf2seq2 的正确率 0.57。在 K-中心聚类实验中,数据
(Dynamic Time Warping, DTW)距离的最近邻分类和 K-中心
聚类,并且将它们的实验结果进行比较。
对于分类实验,训练数据集与测试数据集样本比例为
2:1,并采用分类正确率来评价分类效果;在聚类实验中,采
用文献[7]提出的图像聚类精度作为聚类效果评价。聚类精度
P
的计算公式为
P
=
1 k
微型电脑应用, 2008, 24(1): 17-21.
[4] Zhang Dengsheng, Lu Guojun. Review of Shape Representation and
Description Techniques[J]. Pattern Recognition, 2004, 37(1): 1-19.
y
BP
θA
C
0
x
图 4 标记点选取
文献[5]指出,对图像的研究(如图像的检索、分类和聚类) 可以转化为对时间序列的研究,它为图像分析提供了一种新 方法,即经过标记表示和伸缩、旋转不变性处理后,图像被
(a)质心距离标记法
1.0
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1 0.0
0 2 4 6 8 10 12 14 16 18 t
【Abstract】Aiming at the problem that the important points of the contour curve may be omitted with shape signature representation method, this paper proposes a centroid distance signature method based on corner point detection. It uses contour tracing to get the contour, adopts corner point detection to obtain corner points, and represents shape signature with centroid distance. Experiments on 1-NN classification and K-medoids clustering show the effectiveness of the method. 【Key words】shape feature; feature extraction; shape signature; time series; corner point
韦东兴,陈晓云,徐荣聪
(福州大学数学与计算机科学学院,福州 350108)
摘 要:针对形状标记表示法可能遗漏轮廓曲线上较重要边界点的问题,提出一种基于角点检测的质心距离标记法。该方法采用轮廓跟踪 技术获取物体的轮廓曲线,通过角点检测得到曲线上的所有角点,利用质心距离产生形状标记。以最近邻分类和 K-中心聚类对其性能进行 验证,结果证明了该方法的有效性。 关键词:形状特征;特征提取;形状标记;时间序列;角点
的时间序列长度短、存储空间低,而且是一种更加有效的形
状特征提取方法。
参考文献
[1] 冈萨雷斯. 数字图像处理[M]. 北京: 电子工业出版社, 2005.
[2] 贾元元. 基于形状的图像数据库检索技术研究[D]. 西安: 西安
电子科技大学, 2004.
[3] 裘镇宇, 危 辉. 基于链码的边缘跟踪算法及直线段检测[J].
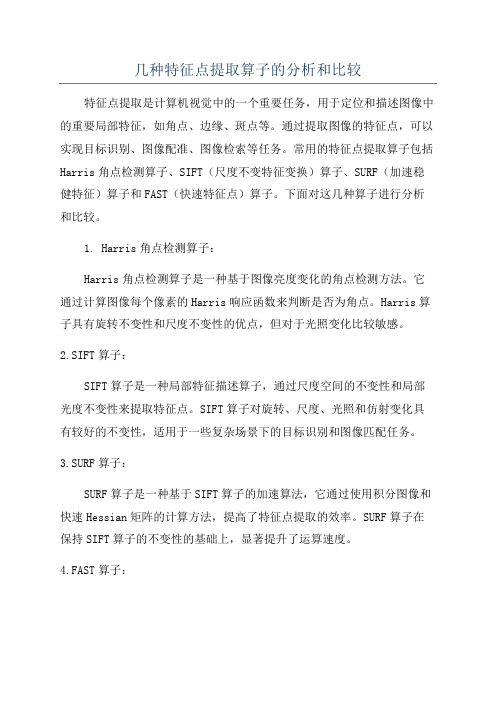
(1)根据光栅扫瞄,从左到右,从下到上,若发现像素从 0 变为 1 的像素点 C0 ,存储它的坐标,并且将它作为轮廓跟 踪的起始点。
(2)从像素点 C0 开始按逆时针方向研究 C0 的 8 邻域像素 点,当第一次出现像素值为 1 的像素点 Ck (起初 k = 1 )时,存 储 Ck 的链码,并且将 Ck 作为下一次跟踪的初始点。
Image Shape Feature Extraction Method Based on Corner Point Detection
WEI Dong-xing, CHEN Xiao-yun, XU Rong-cong
(College of Mathematics and Computer Science, Fuzhou University, Fuzhou 350108)
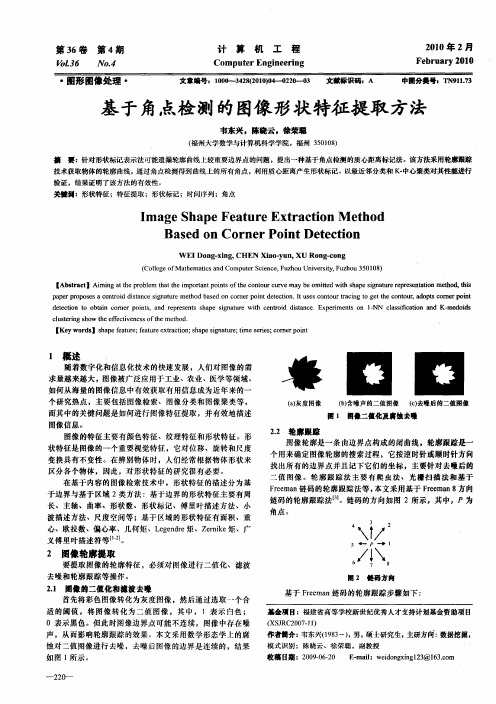
2 图像轮廓提取
要提取图像的轮廓特征,必须对图像进行二值化、滤波 去噪和轮廓跟踪等操作。 2.1 图像的二值化和滤波去噪
首先将彩色图像转化为灰度图像,然后通过选取一个合 适的阈值,将图像转化为二值图像,其中,1 表示白色; 0 表示黑色。但此时图像边界点可能不连续,图像中存在噪 声,从而影响轮廓跟踪的效果。本文采用数学形态学上的腐 蚀对二值图像进行去噪,去噪后图像的边界是连续的,结果 如图 1 所示。
[5] Niennattrakul V, Ratanamahatana C A. Clustering Multimedia Data
Using Time Series[C]//Proc. of International Conference on Hybrid
Information Technology. Island, Korea: [s. n.], 2006.
图 2 链码方向
基于 Freeman 链码的轮廓跟踪步骤如下:
基金项目:福建省高等学校新世纪优秀人才支持计划基金资助项目 (XSJRC2007-11) 作者简介:韦东兴(1983-),男,硕士研究生,主研方向:数据挖掘, 模式识别;陈晓云、徐荣聪,副教授 收稿日期:2009-06-20 E-mail:weidongxing123@
r(t) = ((x(t) − xc )2 + ( y(t) − yc )2 )1 2 其中, r(t) 是质心距离; (x(t), y(t)) 是轮廓曲线上的任一点; (xc , yc ) 是质心坐标。当 t = α , 2α , 时,得到时间序列。这样 产生的标记具有平移不变性,但不具有伸缩不变性和旋转不 变性。为了解决伸缩不变性,将边界点与质心的距离归一化 到[0, 1]区间上。对于旋转不变性,则选取质心距离最大的边 界点作为标记的起点。经过伸缩不变性和旋转不变性处理后 的质心距离标记与相应的图像构成一一对应的关系。