扇形扫描倒计时
DSA设备(2)

DSA设备(2)
【考点1039】平板探测器根据数字转换的方式不同分直接转换式和间接转换式。
【考点1040】非晶硒平板探测器主要由基板、集电矩阵、砸层、电介层、顶层电极和保护层等构成。
【考点1041】非晶硅平板探测器由保护层、反射层、闪烁晶体层、探测元阵列层、信号处理电路层和支撑层等构成。
【考点1042】平板探测器技术指标有∶有效面积、像素大小、量子检出率(DQE)、空间分辨力、密度分辨力、可变视野数和数据读出通道数等。
【考点1043】计算机发出准备就绪信号,
表示可以进行脉冲曝光。
【考点1044】数字减影∶是指对某种特定改变前后所获得的图像,通过数字化图像处理,实施减影来突出特定结构。
【考点1045】数字电影∶采集速率一般要求大于25帧/秒。
主要用于运动脏器的图像采集。
【考点1046】大型DSA设备的机械系统包括机架、导管床、显示器吊架等构成。
【考点1047】现在DSA系统的机架大都采用C形臂。
按C形臂的数量又分单C形臂和双C形臂。
按安装方式可分为落地式和悬吊式两种。
【考点1048】机架功能有角度支持、角度记忆、体位记忆技术、快速旋转和安全保
护等。
【考点1049】导管床技术指标∶①高度与长度∶高度45~105cm;长度>3m。
②浮动床面。
③床面材料要求均匀、高强、低衰减。
承重大于250kg。
④铅防护帘。
【考点1050】高压注射器一般为两种类型∶一种为定压力型,另一种为定流率型。
【考点1051】激光相机目前主要分干式激光相机和湿式激光相机二种,大部分使用为干式激光相机。
FIT2D简明使用手册

FIT2D简明使用手册FIT2D是由ESRF(European Synchrotron Radiation Facility)工作人员编写的一款软件,其功能较为丰富,本文仅就其小角散射部分进行介绍。
启动和运行本软件无需安装和注册,直接在FIT2D文件夹下双击fit2d.exe文件即可开始运行,其界面包括文本窗口和图形窗口:图1:文本窗口图2:图形窗口在图形窗口下单击I ACCEPT,进入程序初始化设置界面:图3:初始化界面单击X-DIMENSION按钮可对X轴初始长度进行设置,同样可设置Y轴,注意如果设置值小于载入图像的尺度,图像将不能完全显示。
MEMORY按钮用于为程序分配内存,如果设定为NO,则程序将不分配占用内存序列。
通常设定为YES。
V ARIANCE按钮将使程序占用双倍内存,通常设定为NO,仅当某些数据分析出错时开启。
设置完毕后,单击OK,进入主菜单:图4:主菜单小角散射分析在主菜单下单击SAXS/GISAXS选项,进入小角散射数据分析界面(可以看出,此部分程序是由粉末衍射程序移植而来)。
图5:小角散射点击INPUT键,输入文件:图6:文件的读入路径的默认值是在FIT2D文件夹下,左侧窗口可选择上一层或下一层文件夹,右侧显示文件名。
注意:所有操作均为单击,与通常windows习惯不同。
图7:示例(衍射图)文件打开后程序界面如图7 所示,其主要功能均以下方按键形式定义,下文将主要介绍两种数据采集模式。
确定光束线中心点点击BEAM CENTER,进入子菜单。
图8:BEAM CENTER本软件提供的定位方法包括2维高斯拟合、平均值定位、圆环定位、椭圆环定位等。
常用的是2维高斯拟合,首先点击2D GAUSSIAN FIT:图9:选择束线中心根据图形概略的选择束线中心的位置,注意不能偏差太多。
图10:得到光束线中心计算完毕,自动退回到小角散射界面。
求解光束线中心是一项重要的准备工作,下文将要介绍的两种数据采集模式都需要确定光束线中心。
X射线扫描方式及其用法

扫描方式及其用法多晶体X射线衍射方法一般都是θ-2θ扫描。
即样品转过θ角时,测角仪同时转过2θ角。
这个转动的过程称为扫描。
例如,我们要对样品进行物相鉴定时,需要测量2θ=5°-80°范围内的衍射谱,这个测量过程就称为“扫描”。
扫描的方式一般分为两种:连续扫描和步进扫描。
连续扫描是指测角仪的连续转动方式,测角仪从起始的2θ到终止的2θ进行匀速扫描。
其参数主要有两个,一个是数据点间隔,另一个是扫描速度。
扫描速度是指单位时间内测角仪转过的角度,通常取2°/min,4°/min 或8°/min或16°/min等。
数据点间隔是指每隔多少度取一个数据点。
一般来说,两个参数需要组合。
若数据点间隔取0.02°,则步长可取4-8°/min。
不当的组合会引起衍射峰强度的降低、衍射峰型不对称、或峰位向扫描方向一侧移动。
连续扫描一般用于做较大2θ范围内的全谱的扫描,适合于定性分析。
例如:用连续扫描方式,从20°扫描到80°,数据点间隔为0.02°,扫描速度为4°/min。
所需要的时间为:(80-20)/4=15min。
从这个计算过程来看,实验时间与数据点间隔无关,连续扫描一般用时较少。
一般来说,如果X光管的功率较低或实际使用功率较低或光管使用时间较长,为了获得更加清晰的图谱和较高的强度,需要使用较慢的扫5描速度,如2°/min。
反之,使用高功率的光管,如18KW的转靶光管,当使用功率达到10KW时,扫描速度可以使用8°/min。
有人做过实验,发现18KW的转靶衍射仪上,用扫描速度4,8和16°/min 来扫描同一个样品,图谱基本没有变化。
对于硅酸盐之类的无机物、金属材料中的微量相或结晶状态不好的化合物相分析,建议使用较慢的扫描速度来获得较高的强度和清晰的图谱。
扫描速度极慢时可以使用数据点间隔0.01°,但当扫描速度为4°/min或以上的速度时,建议使用0.02°或0.03°。
B超超声设备成像原理培训讲义

用机械方法摆动或转
动换能器以实现超声 束在扫查平面内作扇 形扫查的方式。
旋转式扇扫B超仪 采用4个(或3个)性能相同 的换能器,等角度安放在一 个圆形转轮上,马达带动转 轮旋转,每个换能器靠近收/ 发窗口时开始发射和接收超 声波,各换能器交替工作。
旋转式探头,扫描均匀,噪声和振动小,寿命远比摆动 式长。
超声设备成像原理
知识重点
§典型超声设备的成像原理
A型超声 M型超声 B型超声 D型超声 C型超声 F型超声
§医用超声设备的主要参数
分辨力 超声工作频率和脉冲重复频率 帧频 灰阶 动态范围
第五节 B型超声成像
一、机械扇形扫描B超仪
• 超声波束以扇形方式扫查,可以不受透声窗口窄小
的限制而保持较大的探查范围。
叫做相控阵扫描。
2.仪器组成与工作原理
偏向角参数发生器用于在半个帧频周期内, 等时差地产生若干个不同周期的序列脉冲 ,
相位控制器用来把偏向角参数转换成相控 阵的触发信号。 触发信号控制各路脉冲激
励器,产生激励脉冲分别加于探头各压电 振元,各振元产生超声波发射。
发射间歇时,各振元的回波信号,通过 接收延时电路合成为一路送往接收放大 电路处理后进行调辉显示。接收延时电 路包含了聚焦延时和方向延时,因为发 射时各路激励脉冲接受了方向延时和聚 焦延时,必须给予相应的时间补偿,才 能保证在接收放大电路同相合成。
3.相控阵扇扫与机械扇扫2种方式的比较
机械扇扫B型超声波诊断仪,具有较好的柱状声束, 容易获得较高的灵敏度与影像分辨力,波束控制电 路简单,成本低。缺点是机械式探头制作要求严格、 工作噪声强、重量较大,探头寿命短。振元不能直 接与被检者贴近,受肋骨的影响略大。
相控阵扇扫B超仪,没有机械噪音,探头寿命长,重 量轻。缺点是波束副瓣大,干扰严重,分瓣力受影 响;探头晶阵切割精细,整机线路复杂,成本高。相 控阵扇扫方式已占据主导地位。
头颅CT扫描ppt课件-2024鲜版

第五代CT
电子束CT,利用电子束轰击钨 靶产生X线,扫描速度极快, 但图像质量相对较差。
4
头颅CT扫描定义及作用
2024/3/28
定义
利用X线束对人体头颅部位进行断 层扫描,获得不同层面的组织结 构和病变信息。
作用
辅助医生对颅内病变进行诊断和 鉴别诊断,如脑外伤、脑出血、 脑梗死、脑肿瘤等。
5
原理及工作过程
骨折、骨瘤、骨髓炎等病变可导致颅骨形态 异常。
脑室系统异常
脑积水、脑室炎等病变可导致脑室系统形态 改变。
2024/3/28
脑实质异常
脑梗死、脑出血、脑炎等病变可表现为脑实 质密度改变。
脑血管异常
动脉瘤、血管畸形等病变可表现为脑血管形 态异常。
15
常见病变类型及其特点分析
脑梗死
低密度梗死灶,边界清晰,可伴有脑 水肿和占位效应。
2024/3/28
25
技术创新点和发展方向预测
人工智能辅助诊断
利用AI技术自动分析CT图像,辅 助医生进行更快速、准确的诊断
。
2024/3/28
远程医疗服务
通过云计算和网络技术,实现远程 CT扫描和诊断,提高医疗服务的 可及性。
个性化扫描方案
根据患者的具体情况,制定个性化 的扫描方案,以优化图像质量和减 少辐射剂量。
头颅CT扫描ppt课件
2024/3/28
1
contents
目录
2024/3/28
• 头颅CT扫描基本概念与原理 • 头颅CT检查前准备与操作规范 • 头颅CT图像解读与诊断方法 • 头颅CT在临床应用中的价值体现 • 头颅CT技术发展趋势及挑战 • 总结回顾与课堂互动环节
2
CT平行束和扇形束算法的转换

uwcos vwsin
雅各比行列式为
u u
Jw v
v csions
wsin wcosw
w
故 dudw v dwd
则
2
f(x,y) F po(lw a,r)e2iw (xco s ysin )wdwd
00
7
具体的推导
2
f(x,y) Fpola(r , )e2i(xcosysin) d d
24
数据冗余条件
25
主要参考资料: [1] CT重建算法;闫镔,李磊 编著;2014,科学出版社 [2] CT重建算法;曾根生;2009年,高等教育出版社
26
要注意的是,在扇形束短扫描成像中,并不是所有的线积分都被刚好
测到一次。有些线积分被测到一次,而另一些线积分会被测到两次。
即使在扫描角度β 的范围小于π 的情形, 还是有一些线积分会被测到两
次的。其实,任何直线,只要它与扇形的焦点轨迹有两个交点,那么
沿这条线的线积分就被测到了两次(图3.10)。
23
其实,任何直线,只要它与扇形的焦点轨迹有两个交点,那么沿这条 线的线积分就被测到了两次。为了获得足够的数据来做断层成像,我 们要求过物体的每一条线的线积分都要至少被测到一次。对于冗余的 数据,在图像重建时需要施加适当的权函数来处理。举例来说,若一 个线积分被测到了两次,对它们要进行加权,而且它们的权因子之和 一定要是1。
5
平行束图像重建
滤波反投影法(FBP) •(1)求投影数据 p(s,)的以s为变量的一维傅里叶变换, 得到 P(,) •(2)对 P(,乘) 以斜波滤波器的传递函数 ,得到
Q(,)
•(3)求 Q(,的) 以 为变量的以为傅里叶反变换,得到
CT基本原理-影像FTP

探 测 准 器 直 器
A/D 转换器
计算机 重建
D/A 转换器
监视器 CT图像
激光打 印机
CT 照片
影像信息经过部件及传递的过程
计算机部分
主计算机: 阵列处理器
图像显示及存储部分
监视器
作用:通过键盘与计算机对话(包括患者资料的输入、扫 描过程的监控等)和图像显示
存储器:硬磁盘、磁带、软盘和光盘等
功能:存储图像、保存操作系统及故障诊断软件 扫描原始数据存储于硬盘缓冲区;重建图像存入硬盘的图 像存储区;磁带、光盘等存取图像通过硬盘作中介 为保证图像的动态范围,存储采取数字二维像素阵列方 式,每个像素点由若干与图像灰阶有关的比特组成 CT图像的矩阵5122,深度8-12个比特,灰阶范围是512( 28)-4096(212)5122×2字节的CT图像约需0.5MB的存 储空间一次CT检查有50幅图像,需25MB的存储空间
CT的成像原理
• CT:COMPUTED TOMOGRAPHY: • 以X线束对体部某一选定体层层面进行扫描, 测定透过的X线量, 数字化后经过计算得出 该层面各个单位容积的吸收系数, 然后重建 图像的一种成像技术。
数据采集的基本原理
27
采集信息系统
多幅 相机
CT 照片
X 线 管
人体 准 直 器
CT基本原理
常规X 线摄影
常规X 线摄影三维人体二维投影
2
CT与传统X线比较
• 1.X线利用率;窄线束,高能量,检测器效 率 • 2.图像:无重叠 • 3.分辨率:密度分辨率,空间分辨率
• • • •
CT成像的物理基础 X线的穿透性 穿过物体的X线被吸收衰减 I=I0eul
根据CT机发展的时序和构造性能,大致可 分成五代 常规CT扫描方式
二维cfar原理

二维cfar原理二维CFAR原理详解什么是CFAR?CFAR(Constant False Alarm Rate)全称为恒虚警率检测技术,它是一种雷达信号处理技术,用于检测雷达回波中的目标信号并剔除噪声。
二维CFAR是什么?二维CFAR是一种基于雷达回波信号的处理方法,可用于在雷达扇区中检测和定位目标。
它是对传统CFAR技术的改进和拓展,具有更高的抗干扰能力和更精确的目标检测结果。
二维CFAR原理1.输入信号的切片: 首先,将雷达回波信号按照一定的方式进行切片。
通常情况下,切片的方式是将雷达扇区分成若干个小块。
这样就得到了一个个二维的小块信号。
2.计算阈值: 对于每个小块信号,需要计算一个适当的阈值来判断其中是否含有目标信号。
这个阈值的计算通常采用自适应的方法,也就是CFAR算法。
3.目标检测: 使用上一步计算得到的阈值来对每个小块信号进行目标检测。
如果某个小块的信号强度超过了阈值,就可以认为该小块中存在目标信号。
4.目标定位: 在目标检测的基础上,可以通过进一步分析各个小块的位置信息,来计算目标的精确位置。
二维CFAR的优势•更精确的目标检测: 二维CFAR能够将雷达扇区更细致地切分成小块,从而可以更准确地检测目标信号。
•更高的抗干扰性能: 二维CFAR采用自适应的阈值计算方法,可以根据环境中的噪声水平动态地调整阈值,从而提高了抗干扰的能力。
•更精确的目标定位: 通过对各个小块信号的位置信息进行分析,二维CFAR可以提供更准确的目标定位结果。
总结二维CFAR是一种基于雷达回波信号的处理方法,用于检测和定位目标。
它通过将雷达扇区切分成小块,计算适当的阈值并应用于每个小块信号,实现了更精确的目标检测和定位。
二维CFAR相较于传统CFAR技术具有更高的抗干扰性能和更精确的结果。
这种方法在雷达应用领域具有广泛的应用前景。
FIT2D简明使用手册

FIT2D简明使用手册FIT2D是由ESRF(European Synchrotron Radiation Facility)工作人员编写的一款软件,其功能较为丰富,本文仅就其小角散射部分进行介绍。
启动和运行本软件无需安装和注册,直接在FIT2D文件夹下双击fit2d.exe文件即可开始运行,其界面包括文本窗口和图形窗口:图1:文本窗口图2:图形窗口在图形窗口下单击I ACCEPT,进入程序初始化设置界面:图3:初始化界面单击X-DIMENSION按钮可对X轴初始长度进行设置,同样可设置Y轴,注意如果设置值小于载入图像的尺度,图像将不能完全显示。
MEMORY按钮用于为程序分配内存,如果设定为NO,则程序将不分配占用内存序列。
通常设定为YES。
V ARIANCE按钮将使程序占用双倍内存,通常设定为NO,仅当某些数据分析出错时开启。
设置完毕后,单击OK,进入主菜单:图4:主菜单小角散射分析在主菜单下单击SAXS/GISAXS选项,进入小角散射数据分析界面(可以看出,此部分程序是由粉末衍射程序移植而来)。
图5:小角散射点击INPUT键,输入文件:图6:文件的读入路径的默认值是在FIT2D文件夹下,左侧窗口可选择上一层或下一层文件夹,右侧显示文件名。
注意:所有操作均为单击,与通常windows习惯不同。
图7:示例(衍射图)文件打开后程序界面如图7 所示,其主要功能均以下方按键形式定义,下文将主要介绍两种数据采集模式。
确定光束线中心点点击BEAM CENTER,进入子菜单。
图8:BEAM CENTER本软件提供的定位方法包括2维高斯拟合、平均值定位、圆环定位、椭圆环定位等。
常用的是2维高斯拟合,首先点击2D GAUSSIAN FIT:图9:选择束线中心根据图形概略的选择束线中心的位置,注意不能偏差太多。
图10:得到光束线中心计算完毕,自动退回到小角散射界面。
求解光束线中心是一项重要的准备工作,下文将要介绍的两种数据采集模式都需要确定光束线中心。
扇形束数据采集方式

扇形束数据采集方式
一、引言
扇形束数据采集是一种常用的测量方法,广泛应用于工程测量、地质勘探、医学影像等领域。
本文将详细介绍扇形束数据采集的方式,并分为以下几个方面进行讲解。
二、扇形束数据采集原理
1. 扇形束数据采集的基本原理
2. 扇形束数据采集设备的组成及工作原理
三、扇形束数据采集方法
1. 扫描式扇形束数据采集方法
a. 单线扫描式采集方法
b. 多线扫描式采集方法
2. 并行式扇形束数据采集方法
a. 平行光束并行式采集方法
b. 聚焦光束并行式采集方法
3. 非接触式扇形束数据采集方法
a. 激光雷达非接触式采集方法
b. 光纤传感器非接触式采集方法
四、扫描参数对扇形束数据采集的影响
1. 扫描速度对数据精度的影响
2. 扫描角度对数据分辨率的影响
3. 光源功率对信噪比的影响
五、扇形束数据采集的应用领域
1. 工程测量中的应用
2. 地质勘探中的应用
3. 医学影像中的应用
六、扇形束数据采集的优缺点分析
1. 优点
a. 高精度
b. 高效率
c. 非接触式采集
2. 缺点
a. 设备成本高
b. 对环境要求较高
七、结论
通过以上对扇形束数据采集方式的详细介绍,我们可以看到它在各个领域都有广泛的应用。
随着技术的不断发展,扇形束数据采集方式将会越来越成熟,为各个行业带来更多便利和发展机遇。
DSA2024_功能操作说明

DSA2024_功能操作说明一、功能特点:1.高频范围:DSA2024支持高达20GHz的信号测试和分析,适用于射频、微波和毫米波等高频领域的应用。
2.高分辨率:采用先进的技术,DSA2024可以提供高达1000:1的动态范围和1Hz的频率分辨率。
3.多种分析功能:DSA2024可以进行频谱分析、时域分析、功率谱密度分析等多种信号分析。
4.自动化测试:支持自动测量、数据导出和报告生成等自动化测试功能,提高测试效率。
5.直观显示:DSA2024采用高分辨率的显示屏,可以直观显示信号特性,并支持波形的放大、滚动和扫描等操作。
二、操作方法:1.系统设置:(1)打开DSA2024,并连接待测信号源。
(2)进入系统设置界面,设置相关参数,如中心频率、起始频率、带宽等。
(3)根据需要,选择相应的分析模式,如频谱分析、时域分析等。
2.频谱分析:(1)在频谱分析模式下,选择频谱分析功能。
(2)设置相关参数,如RBW(分辨率带宽)、VBW(视频带宽)、扫描时间等。
(3)启动分析,DSA2024将采集并显示待测信号的频谱图形。
(4)对频谱进行分析,可以通过光标测量特定频率点的幅度、相位等特性。
3.时域分析:(1)在时域分析模式下,选择时域分析功能。
(2)设置相关参数,如采样率、记录长度、起始时间等。
(3)启动分析,DSA2024将采集并显示待测信号的时域波形。
(4)对时域波形进行分析,可以观察信号的周期、峰值、波形变化等特性。
4.功率谱密度分析:(1)在功率谱密度分析模式下,选择功率谱密度分析功能。
(2)设置相关参数,如起始频率、终止频率、窗函数等。
(3)启动分析,DSA2024将采集并显示待测信号的功率谱密度曲线图。
(4)对功率谱密度进行分析,可以了解信号的频率分布和功率特性等。
5.自动化测试:(1)在自动化测试模式下,选择自动化测试功能。
(2)配置相关测试任务,如测试信号源、测量参数、测试范围等。
(3)启动自动化测试,DSA2024将根据配置的任务进行自动化测试,并生成测试报告。
扇形波束圆锥扫描微波散射计信号处理方法[发明专利]
![扇形波束圆锥扫描微波散射计信号处理方法[发明专利]](https://img.taocdn.com/s3/m/0348f7e7b04e852458fb770bf78a6529647d359f.png)
[19]中华人民共和国国家知识产权局[12]发明专利申请公布说明书[11]公开号CN 101363913A [43]公开日2009年2月11日[21]申请号200810166841.4[22]申请日2008.09.27[21]申请号200810166841.4[71]申请人中国航天科技集团公司第五研究院第五〇四研究所地址710000陕西省西安市165信箱[72]发明人郭语 刘丽霞 王小宁 段崇棣 [74]专利代理机构中国航天科技专利中心代理人安丽[51]Int.CI.G01S 7/48 (2006.01)G01S 17/00 (2006.01)权利要求书 2 页 说明书 8 页 附图 3 页[54]发明名称扇形波束圆锥扫描微波散射计信号处理方法[57]摘要扇形波束圆锥扫描微波散射计信号处理方法,步骤为:将采集的回波或内定标信号模数转换后,分成噪声通道和信号通道分别进行处理;a.噪声通道对转换后信号依次进行数字下变频、模平方、累加处理,得到能量值;b.信号通道对转换后信号依次进行数字下变频、傅立叶变换FFT、模平方、实时频率定位,根据频率定位结果进行各分辨单元数据的能量累加,最终得到各分辨单元的能量值。
本发明可以消除大尺寸足迹内各分辨单元不同多普勒频率的影响,进一步提高波束足迹内各分辨单元回波信号的测量精度。
200810166841.4权 利 要 求 书第1/2页 1、扇形波束圆锥扫描微波散射计信号处理方法,其特征在于包括下列步骤: 将采集的回波或内定标信号模数转换后,分成噪声通道和信号通道分别进行处理;a.噪声通道对转换后信号依次进行数字下变频、模平方、累加处理,得到能量值;b.信号通道对转换后信号依次进行数字下变频、傅立叶变换FFT、模平方、实时频率定位,根据频率定位结果进行各分辨单元数据的能量累加,最终得到各分辨单元的能量值;其中,实时频率定位过程如下:(1)计算各分辨单元不计多普勒频率偏移时的起始频率f ib、终止频率f ie和多普勒频率预补偿量fd lb;(2)根据步骤(1)的结果确定各分辨单元近端预补偿后的多普勒频率偏移项(f d i b-f d l b)及远端预补偿后的多普勒频率偏移项(f d i e-f d l b);(3)根据步骤(1)和步骤(2)得计算结果,确定各分辨单元最终的起始频率f i b+fd i b-fd l b和终止频率为f i e+fd i e-fd l b,完成实时频率定位。
Honeywell HF521 2D 扫描模块说明书
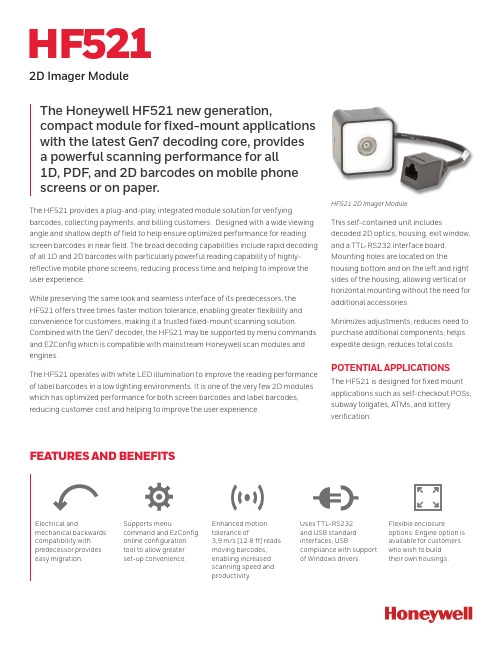
HF521 2D Imager ModuleThe Honeywell HF521 new generation,compact module for fixed-mount applications with the latest Gen7 decoding core, provides a powerful scanning performance for all 1D, PDF, and 2D barcodes on mobile phone screens or on paper.The HF521 provides a plug-and-play, integrated module solution for verifying barcodes, collecting payments, and billing customers. Designed with a wide viewing angle and shallow depth of field to help ensure optimized performance for reading screen barcodes in near field. The broad decoding capabilities include rapid decoding of all 1D and 2D barcodes with particularly powerful reading capability of highly-reflective mobile phone screens, reducing process time and helping to improve the user experience.While preserving the same look and seamless interface of its predecessors, the HF521 offers three times faster motion tolerance, enabling greater flexibility and convenience for customers, making it a trusted fixed-mount scanning solution. Combined with the Gen7 decoder, the HF521 may be supported by menu commands and EZConfig which is compatible with mainstream Honeywell scan modules and engines.The HF521 operates with white LED illumination to improve the reading performance of label barcodes in a low lighting environments. It is one of the very few 2D modules which has optimized performance for both screen barcodes and label barcodes, reducing customer cost and helping to improve the user experience.FEATURES AND BENEFITSElectrical andmechanical backwards compatibility with predecessor provides easy migration.Supports menucommand and EzConfig online configuration tool to allow greater set-up convenience.Enhanced motion tolerance of3,9 m/s [12.8 ft] reads moving barcodes, enabling increased scanning speed and productivity.Uses TTL-RS232 and USB standard interfaces; USBcompliance with support of Windows drivers.Flexible enclosureoptions: Engine option is available for customers who wish to buildtheir own housings.This self-contained unit includes decoded 2D optics, housing, exit window, and a TTL-RS232 interface board. Mounting holes are located on the housing bottom and on the left and right sides of the housing, allowing vertical or horizontal mounting without the need for additional accessories.Minimizes adjustments; reduces need to purchase additional components; helps expedite design; reduces total costs.POTENTIAL APPLICATIONSThe HF521 is designed for fixed mount applications such as self-checkout POSs, subway tollgates, ATMs, and lottery verification.HF5212D Imager ModuleHF521 Technical SpecificationsHF521 2D Imager Module Datasheet | /ast |2FIGURE 1. DIMENSIONAL DRAWINGS (FOR REFERENCE ONLY (MM/IN)1 Extreme temperatures will reduce the depth of field.2 Extreme ambient light conditions will reduce the depth of field.3 Barcode quality and environmental conditions may affect performance.EzConfig is a trademark or a registered trademark of Honeywell International Inc.All other trademarks are the property of their respective owners.007633-2-EN US | 2 | 06/21© 2021 Honeywell International Inc. All rights reserved.FOR MORE INFORMATIONTo learn more about Honeywell scan engines and barcodedecoding software, visit our website .HoneywellAdvanced Sensing Technology 830 East Arapaho Road Richardson, TX 75081/astWARRANTY/REMEDYHoneywell warrants goods of its manufacture as being free of defective materials and faulty workmanship during the applicable warranty period. Honeywell’s standard product warranty applies unless agreed to otherwise by Honeywell in writing; please refer to your order acknowledgment or consult your local sales office for specific warranty details. If warranted goods are returned to Honeywell during the period of coverage, Honeywell will repair or replace, at its option, without charge those items that Honeywell, in its sole discretion, finds defective. The foregoing is buyer’s sole remedy and is in lieu of all other warranties, expressed or implied, including those of merchantability and fitness for a particular purpose. In no event shall Honeywell be liable for consequential, special, or indirect damages.While Honeywell may provide application assistance personally, through our literature and the Honeywell web site, it is buyer’s sole responsibility to determine the suitability of the product in the application.Specifications may change without notice. The information we supply is believed to be accurate and reliable as of this writing. However, Honeywell assumes noresponsibility for its use.。
用于扇形扫描超声仪的两种新型数字扫描变换器

用于扇形扫描超声仪的两种新型数字扫描变换器
安玉忠;高上凯
【期刊名称】《中国医疗器械杂志》
【年(卷),期】1991(015)006
【摘要】本文首先介绍一种高性能的数字扫描变换器。
它采用二次变换和二维插补技术,使系统在实现坐标变换的同时具有全景变焦的功能。
这种数字扫描变换器已用于我们研制的多功能超声诊断仪样机中。
本文还介绍了另一种采用递推运算和圆插补技术的数字扫描变换器。
它具有器件少、价格低的特点,适用于便携式扇形扫描或凸阵B超中。
【总页数】7页(P311-317)
【作者】安玉忠;高上凯
【作者单位】不详;不详
【正文语种】中文
【中图分类】R445.1
【相关文献】
1.用于扫描质子微探针的数字扫描图像监示仪 [J], 谷英梅;朱节清
2.B型超声仪机械扇形扫描探头的修理 [J], 宋贵方
3.相控阵超声检测扇形扫描的两种成像方式比较 [J], 田国良; 侯金刚; 蔚道祥; 刘恩凯
4.一种用于脑部扫描的新型智能脑部CT扫描仪 [J],
5.扇形超声扫描仪数字扫描变换器的研制 [J], 黄宇星;程敬之
因版权原因,仅展示原文概要,查看原文内容请购买。
激光点云扇形编码

激光点云扇形编码
激光点云扇形编码是一种将三维激光点云数据编码为一维信号的方法。
该方法的原理是将三维空间划分为若干个扇形区域,并对每个扇形区域内的点云数据进行编码,生成一个包含该扇形信息的一维编码信号。
这种编码方式可以将三维点云数据压缩为一维信号,提高了点云数据的传输和存储效率。
在激光雷达应用中,扇形编码可以用于三维建模、环境感知、机器人导航等领域。
通过扇形编码,可以快速准确地获取激光雷达扫描到的三维点云数据,进而实现目标检测、路径规划等任务。
基于IMAGEWARE风扇叶反求与快速原型制作

基于IMAGEWARE风扇叶反求与快速原型制作
王小军
【期刊名称】《机械设计与制造》
【年(卷),期】2010(000)008
【摘要】以风扇为研究对象,论述了逆向工程技术与快速原型技术相结合的方法.在逆向工程中应用IMAGEWARE软件处理三维激光扫描仪测量得到的风扇点云数据,进而使用三维造型软件Pro/E对其进行了曲面重构,获得了所需的风扇实体模型,并对风扇叶进行了的模具设计,为新产品开发中的预评估、有限元分析等提供了宏观的模型和产品开发依据.
【总页数】2页(P126-127)
【作者】王小军
【作者单位】陕西理工学院机械工程学院,汉中,723003
【正文语种】中文
【中图分类】TH16
【相关文献】
1.基于Imageware和Pro/E的自行车鞍座曲面反求设计 [J], 刘霞;董黎敏;吴大将
2.基于Imageware的汽车后大梁反求设计 [J], 王强;成虹;王静
3.基于Imageware的后视镜曲面反求设计 [J], 朱玉泉;于景华
4.风扇叶片及其模具快速反求设计和制造 [J], 王宗彦;潘宏侠;梁远蕾
5.风扇叶片及其模具的快速反求设计与制造分析 [J], 朱蓓
因版权原因,仅展示原文概要,查看原文内容请购买。
WindCube Scan 扫描式多普勒测风激光雷达说明书

实现可靠的天气观测,共创可持续未来准确的天气预报、气候建模及其他大气研究依赖于可靠的大气参数 (如风、湍流、云和气溶胶)监测能力。
这些参数直接或间接影响人类生活的方方面面。
例如:下一代高分辨率天气预报模型需要高水平的空间和时间连续性。
覆盖全球的卫星观测须与可提供高垂直空间分辨率和时间分辨率的地面观测设备实现网络互联。
WindCube ® Scan 系列风和气溶胶激光雷达可执行全天候实时测量并进行高级数据处理。
作为一种多功能工具,可准确获取风和气溶胶后向散射测量结果,并在多种扫描模式下达到超过10公里的测量距离。
该工具采用成熟的大气结构检测算法,可对对流层中的云层和气溶胶层进行检测、定位和分类,以及对大气边界层 (ABL) 高度进行监测。
针对无法通过常规地面设备或卫星观测覆盖的大气第一垂直分层,利用 WindCube Scan 可以实现有效监测,且准确性较高。
利用测风激光雷达推进天气和气候方面的中尺度和微尺度研究,有助于科学家和气象学家开发更准确的预报模型。
WindCube Scan 扫描激光雷达探索版3D 扫描式多普勒测风激光雷达,用于精确实时风和气溶胶后向散射测量产品亮点优点改善短期天气预报WindCube Scan 可连续观测对流层下层,满足了针对局部超精细测量的需求。
增强气候建模WindCube Scan 为气候模型和数据库提供连续的大气边界层高度和大气光学特性廓线分析数据,帮助生成不断改进的气候模型。
行业多方面支持WindCube Scan 以数十年经验、科学工具、专业知识以及支持服务,使客户能够在设备的整个生命周期内充分发挥作用。
/wind-lidars扫描代码获取更多信息参考编号 B212058ZH-C ©Vaisala 2022本资料受到版权保护,所有版权为 Vaisala 及其各个合作伙伴所有。
保留所有权利。
所有徽标和/或产品名称均为维萨拉或其单独合作伙伴的商标。