ARM处理器工作模式实验
ARM微控制器工作模式

那么究竟如何才能从非特权模式即用户模式切换到特 权模式(即其他六种模式)呢?
这就需要用到SWI软件中断异常。 从用户模式下切换到特权模式的唯一途径,就是使 用一个SWI指令调用。SWI指令强迫处理器用用户模 式切换到SVC管理模式,并且IRQ中断自动关闭。
思考 (1)在用户模式或系统模式下读取SPSR寄存器会有何 结果? (2)在非特权模式下能否对CPSR寄存 器设置?能否读 取CPSR寄存器的值? (提示:参考实验程序有相应的 代码,运行测试一下) (3)在非特权模式下如何使能/禁止IRQ或FIQ中断? (提示:可以先使用SWI指令切换到管理模式。) (4)程序中能否通过MSR指令直接修改CPSR中的T位来 实现ARM状态/ Thumb 状态的切换?
(1)在用户模式或系统模式中是没有SPSR寄存器的,所以要想 知道在用户模式或系统模式下标志位的值,只能通过CPSR。
如上图所示,切换到用户模式,在CPSR中的标志位变成了 用户模式,其值赋给R0寄存器中,所以通过观察R0知道用 户模式即0D0。 相同的方法可以知道系统模式为0DF
(2)在非特权模式下即用户模式下只允许对
备注 不能直接从用户模式切换到其他模 式 与用户模式类似,但具有直接切换到 其他模式等特权
系统(sys) 用于支持操作系统 的特权任务等
特 权 模 式
管理 供操作系统使用的 (svc) 一种保护模式
中止 用于虚拟内存和 (abt) (或)存储器保护
只有在系统复位和软件中断响应时, 才进入此模式
在ARM7内核中没有多大用处 只有在未定义指令异常响应时,才进 入此模式 只有在IRQ异常响应时,才进入此模式
CPSR寄存器显示方式如右图所示。显 示分为两部分,一部分是各个标志位, 另一部分是工作模式。 标志位NZCVQ为条件码标志N、Z、C、 V和Q,显示为大写字母,表示该位为 1;显示为小写字母,表示该位为0。 Q标志在ARM体系结构v5及以上版本 的E变量中才有效。 标志位IFT为IRQ中断禁止位I、FIQ中 断禁止位F和ARM微控制器状态位T,显 示为大写字母,表示该位为1;显示 为小写字母,表示该位为0。T标志在 ARM体系结构v4及以上版本的T变量 中才有效。
ARM微处理器编程基础实验

CPSR定义 定义
N Z C V Q I F T M4 M3 M2 M1 M0
• 条件标志位:N、Z、C、V、Q,对应 条件标志位: 、 、 、 、 ,对应CPSR[31:27]位, 位 ARM指令可以根据这些条件标志位选择性的执行 指令可以根据这些条件标志位选择性的执行 • 控制位:I、F、T及M[4:0],对应 控制位: 、 、 及 ,对应CPSR[7:0]位 位
– 通用寄存器( R0~R15)
• • • • R0-R12 R13用作堆栈指针(SP) R14用作返回地址寄存器(LR) R15用作程序计数器(PC)
– 状态寄存器
• CPSR • SPSR
电子科技大学嵌入式软件工程中心
通用寄存器
• 未分组寄存器:R0~R7,它们在每个模式 未分组寄存器:R0~R7, 下都对应同一个物理寄存器。 下都对应同一个物理寄存器。 • 分组寄存器:R8~R14,又称影子寄存器, 分组寄存器:R8~R14,又称影子寄存器, 不同模式下的寄存器对应的物理寄存器可 能不同 • 程序计数器:PC(R15) 程序计数器:
• 中断禁止位 、F:当I、F=1时分别表示禁止 中断禁止位I、 : 、 时分别表示禁止IRQ、FIQ中断, 中断, 时分别表示禁止 、 中断 时则允许IRQ、FIQ中断 为0时则允许 时则允许 、 中断 • T=0表示执行 表示执行ARM指令集,T=1表示执行 指令集, 表示执行Thumb指令集 表示执行 指令集 表示执行 指令集 • 控制位 控制位M[4:0]控制处理器的运行模式,具体的含义如下表 控制处理器的运行模式, 控制处理器的运行模式 所示
电子科技大学嵌入式软件工程中心
ARM处理器运行模式分类 处理器运行模式分类
ARM 处理器工作状态与工作模式 ARM 体系结构所支持的异常
深入内核逻辑一个宇宙通用的事实是:结构决定功能!我们以典型的ARM嵌入式处理器内核的一般特征为例,,看看ARM设想的功能是如何被“构造”出来的。
主要说两个内容:•ARM处理器工作状态与工作模式•ARM体系结构所支持的异常基础概念字(Word):在ARM体系结构中,字的长度为32位(在8位/16位处理器体系结构中,字的长度一般为16位)。
•半字(Half-Word):在ARM体系结构中,半字的长度为16位,与8位/16位处理器体系结构中字的长度一致。
•字节(Byte):在ARM体系结构和8位/16位处理器体系结构中,字节的长度均为8位。
问:计算机存储设备是按______ (A:字Word,B:半字Half-Word,C:字节Byte)编址的。
处理器工作状态ARM状态:正在执行ARM指令的处理器的状态。
Thumb状态:正在执行Thumb指令的处理器的状态。
不同的状态下,代码密集度不同,,ARM状态按字(32位)存储代码,Thumb状态按半字(16位)存储代码,这种特性有利于我们在必要的时候调整单位存储空间的代码容量,压缩代码占用空间。
这两个状态可以根据情况软件切换,,,后面我们还会再次提到这个话题,,,Note:对于ARM 32位处理器,两种状态下代码存储密集度不同,但在执行时仍是32位的!这就是说,代码可以压缩,但执行效率并不会下降,CPU仍是按字执行的啊!不过,Thumb状态下的指令的使用有某些限制,属于ARM状态下的指令的一个子集。
另外,调整代码密集度的优点在后来的ARM一些版本中可以自动切换,,,不需要程序员再过多费神,这就是所谓Thumb2状态:一种混合型指令集,降低功耗具有高代码压缩性处理器工作模式回顾,前面说过ARM内核采用了大量内部寄存器的特性,,以便有利于支持流水线技术,,,那么这些“大量内部寄存器”如何运作?工作模式本质上就是指内核中的这堆寄存器的功能分配和使用方法ARM处理器内部寄存器一起看,,这里一共有37个32位寄存器•其中,31个通用寄存器,包括程序寄存器(PC);•6个状态寄存器:。
ARM处理器工作模式实验.

其中的5种称为“异常模式”,即FIQ(Fast Interrupt Request)、IRQ(lnterrupt Request)、管理(Supervisor)、中止(Abort)和未定义(Undefined)。
当特定的异常出现时,进入相应的模式。每种模式都有某些附加的寄存器,以避免异常出现时用户模式的状态不可靠。
Abort_Handler:
b Abort_Handler
nop /* Reserved vector */
IRQ_Handler:
b IRQ_Handler
FIQ_Handler:
b FIQ_Handler
SWI_Handler:
mov pc, lr
Reset_Handler:
mrs r0,cpsr /* read CPSR value */
ARM处理器工作模式实验
一、实验目的
通过实验掌握学会使用MSR/MRS指令实现ARM处理器工作模式的切换,观察不同模式下的寄存器,加深对CPU结构的理解。
通过实验掌握ld中如何使用命令行指定代码段起始地址。
二、实验设备
硬件:PC机。
软件:Embest IDE Pr0 2004集成开发环境,Windows 98/2000/NT/XP。
2.程序状态寄存器
3.2节提到的程序状态寄存器CPSR和SPSR包含了条件码标志、中断禁止位、当前处理器模式以及其他状态和控制信息。每种异常模式都有一个程序状态保存寄存器SPSR。当异常出现时,SPSR用于保留CPSR的状态。
3.本实验涉及到的Id命令行参数
-Ttext org
使用org作为输出文件的text
ARM处理器工作模式实验报告

肇庆学院电子信息与机电工程学院实验日期: 2015 年 11 月 30 日班级:12电气1班姓名:李俊杰学号: 19 老师评定:____ _ 实验二:ARM处理器工作模式实验一、实验目的通过实验掌握学会使用MSR/MRS指令实现ARM处理器工作模式的切换,观察不同模式下的寄存器,加深对CPU结构的理解。
通过实验掌握ld中如何使用命令行指定代码段起始地址。
二、实验设备硬件:PC机。
软件:Embest IDE Pr0 2004集成开发环境,Windows 98/2000/NT/XP。
三、实验内容通过ARM汇编指令,在各种处理器模式下切换并观察各种模式下寄存器的区别。
掌握ARM不同模式的进入与退出。
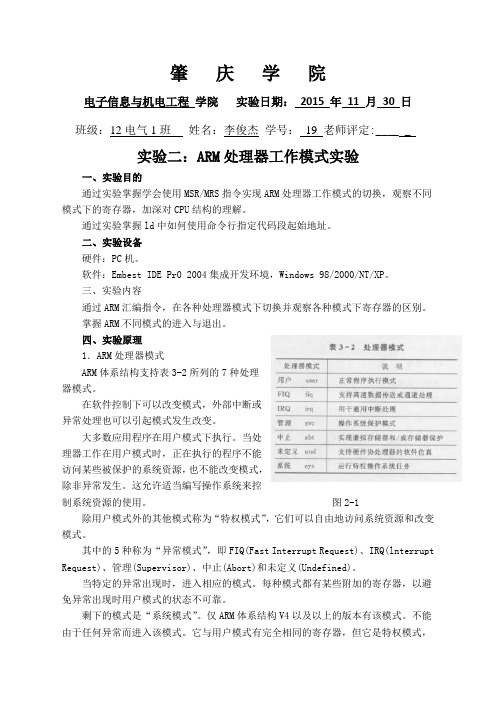
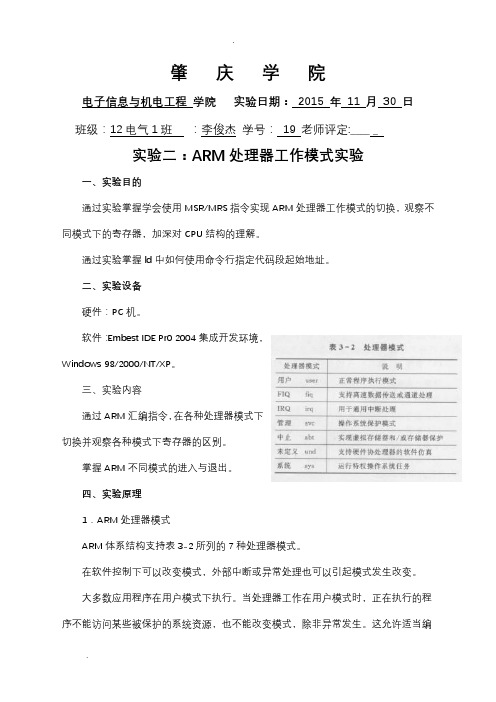
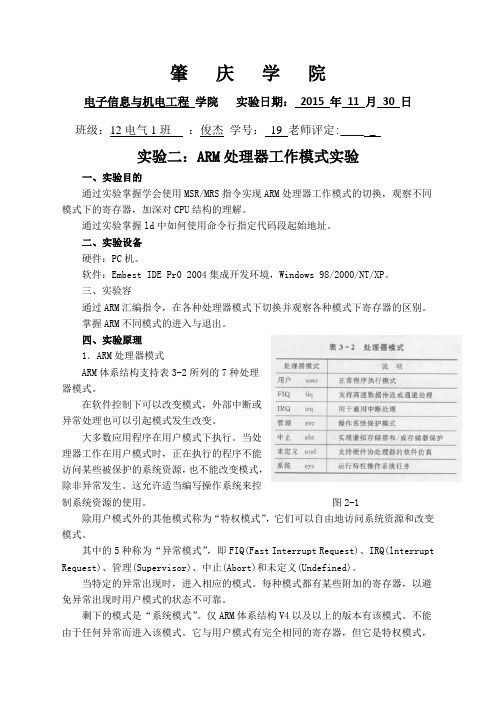
四、实验原理1.ARM处理器模式ARM体系结构支持表3-2所列的7种处理器模式。
在软件控制下可以改变模式,外部中断或异常处理也可以引起模式发生改变。
大多数应用程序在用户模式下执行。
当处理器工作在用户模式时,正在执行的程序不能访问某些被保护的系统资源,也不能改变模式,除非异常发生。
这允许适当编写操作系统来控制系统资源的使用。
图2-1除用户模式外的其他模式称为“特权模式”,它们可以自由地访问系统资源和改变模式。
其中的5种称为“异常模式”,即FIQ(Fast Interrupt Request)、IRQ(lnterrupt Request)、管理(Supervisor)、中止(Abort)和未定义(Undefined)。
当特定的异常出现时,进入相应的模式。
每种模式都有某些附加的寄存器,以避免异常出现时用户模式的状态不可靠。
剩下的模式是“系统模式”。
仅ARM体系结构V4以及以上的版本有该模式。
不能由于任何异常而进入该模式。
它与用户模式有完全相同的寄存器,但它是特权模式,不受用户模式的限制。
它供需要访问系统资源的操作系统任务使用,但希望避免使用与异常模式有关的附加寄存器。
避免使用附加寄存器保证了当任何异常出现时,都不会使任务的状态不可靠。
ARM实验指导书(wjq)

实验一、ARM开发环境的建立一、实验目的学会安装ADS集成环境及连接仿真硬件平台。
二、实验设备硬件:嵌入式实验平台一套、仿真器一个、PC机一台。
软件:Windows 98/2000/NT/XP操作系统、仿真器驱动程序、ADS开发软件一套。
三、实验内容正确安装完全版ARM ADS1.2集成环境,并了解JTAG硬件仿真环境的一些设置和工作方法。
四、实验原理ARM ADS (ARM DEVELOPER SUITE )是ARM平台集成开发环境,它包括两个部分:CodeWarrior for ARM Developer Suite 和AXD debugger 。
AXD调试通过Windows驱动程序及中间件软件与JTAG接口连接,并通过JTAG接口与硬件平台连接本实验使用ARMJtagDebugFinal中间件软件通过LPT1并行接口经JTAG协议转换连接ARM目标板。
五、实验操作步骤1、安装ADS1.2集成开发环境, 把ADS1.2_Licence.rar中的license.dat文件copy到“C:\Program Files\ARM\ADSv1_2\licenses”路径中,覆盖原来的license.dat,若安装目录设置为其他目录,必须copy到相应目录中。
2、启动CodeWarrior for ARM Developer Suite集成开发环境,设置许可证文件指向最新license.dat文件。
3、首次使用时,①把文件夹ARMJtagDebugFinal.rar中的文件copy到“C:\Program Files\ARM\ADSv1_2\ARMJtagDebugFinal”目录中或其他安装目录;②先安装ARMJtagDebugFinal驱动软件(以后不用再安装),即执行文件夹中的“安装驱动.exe”程序,并点击安装按钮,分别安装“并口驱动”和“OCX”;③在桌面建立Arm7Agent和Arm9Agent 两给快捷连接,分别指向ARMJtagDebugFinal目录中的Arm9.exe, Arm7.exe ;4 安装完毕驱动后,每次调试前,必须先启动运行Arm7Agent或Arm9Agent调试代理软件(中间件),调试过程始终不要关闭调试代理程序,启动并正确连接硬件目标系统之后,既可以开始调试ARM7系统或ARM9系统;5、如果在以后的使用过程中发现程序无法启动,重新执行“安装驱动.exe”即可;6、在ADW(SDT)/AXD(ADS)的调试配置选项里选择remote_a.dll7、在ADW/AXD的调试配置里IP地址必须填写:127.0.0.18、具体的调试使用可以参考"jtag.exe"的使用方法六、常见问题1、THUMB/ARM混合编程时断点设置要素当CPU处于一种CPU模式时(THUMB或ARM) 断点只可以设置在当前模式下的指令处不可以设置在另一种模式下的指令解决方案设置一个断点在CPU模式切换指令处(如BX) 当程序运行到此指令并停下来后然后通过单步执行(Step)进入另一种状态这时候就可以在当前模式下任意设置断点了;2、THUMB/ARM混合编程时因为ADW/AXD启动时默任的CPU模式为ARM模式如果你启动调试前你的ARM CPU 正在执行Thumb模式指令那么将会导致调试错误解决方案按一下你的板子的复位键,然后再启动ADW/AXD即可;3、为了加快软件影响单步执行速度现在暂时屏蔽了semihosting 功能如果你需要此功能可以EMAIL索取;4、如果出现无法逼使CPU进入调试的提示只需要复位你的板子,重新启动软件即可;5、如果发现软件没有任何动作把它关了再启动;6、如果发现软件根本无法运行看不到其运行界面那么执行“安装驱动.exe”,重新驱动OCX即可;7、如果出现打开并口失败,那么执行安装驱动.exe , 重新并口驱动即可;8、如果提示检测不到ARM核如果你的CPU没坏供电正常那么就一定是你的JTAG板子问题了,应该参考常用的那种"SDT"或"Wiggler"接线然后在JTAG调试软件选择对应的选项SDT或wiggler或自定义;9、排除这些如果出现其他的调试错误,那么就是你设置ADW/AXD或你的板子问题了10、一些常见问题请参考 上的BBS;11、有任何疑问请EMAIL sendtoyou@ Tang-ZhongGen,调程序实验二、ADS 1.2 集成开发环境练习ARM ADS(ARM Developer Suite V1.2 )是ARM公司,为开发ARM内核处理机而提供的集成开发环境(IDE)和集成调试环境(ICE)。
ARM处理器工作模式实验报告
肇庆学院电子信息与机电工程学院实验日期:2015 年11 月30 日班级:12电气1班姓名:李俊杰学号:19 老师评定:____ _ 实验二:ARM处理器工作模式实验一、实验目的通过实验掌握学会使用MSR/MRS指令实现ARM处理器工作模式的切换,观察不同模式下的寄存器,加深对CPU结构的理解。
通过实验掌握ld中如何使用命令行指定代码段起始地址。
二、实验设备硬件:PC机。
软件:Embest IDE Pr0 2004集成开发环境,Windows 98/2000/NT/XP。
三、实验内容通过ARM汇编指令,在各种处理器模式下切换并观察各种模式下寄存器的区别。
掌握ARM不同模式的进入与退出。
四、实验原理1.ARM处理器模式ARM体系结构支持表3-2所列的7种处理器模式。
在软件控制下可以改变模式,外部中断或异常处理也可以引起模式发生改变。
大多数应用程序在用户模式下执行。
当处理器工作在用户模式时,正在执行的程序不能访问某些被保护的系统资源,也不能改变模式,除非异常发生。
这允许适当编写操作系统来控制系统资源的使用。
图2-1除用户模式外的其他模式称为“特权模式”,它们可以自由地访问系统资源和改变模式。
其中的5种称为“异常模式”,即FIQ(Fast Interrupt Request)、IRQ(lnterrupt Request)、管理(Supervisor)、中止(Abort)和未定义(Undefined)。
当特定的异常出现时,进入相应的模式。
每种模式都有某些附加的寄存器,以避免异常出现时用户模式的状态不可靠。
剩下的模式是“系统模式”。
仅ARM体系结构V4以及以上的版本有该模式。
不能由于任何异常而进入该模式。
它与用户模式有完全相同的寄存器,但它是特权模式,不受用户模式的限制。
它供需要访问系统资源的操作系统任务使用,但希望避免使用与异常模式有关的附加寄存器。
避免使用附加寄存器保证了当任何异常出现时,都不会使任务的状态不可靠。
ARM处理器的工作模式

支持硬件协处理器的软件仿真 未定义指令异常响应时进入此模式
(3)用户和系统模式
6
处理器模式 用用户户 (u(surs) r) 系统系统 (sy(sy) s)
快中断 (fiq) 中断 (irq) 管理 (svc)
中止 (abt)
说明
备注
正常程序工作这模两式 种模式都不不能能由直接异切常换到进其入它模,式 用于而支持且操系它作系统们统模使的特式用权是完任务特全等权相与 到模同用 其式的户 它模 模,寄式 式不存类 等似 特受器, 权用组但具。有可以直接切换 支持户高速模数式据传的输限及通制道。处理操作F系IQ异统常在响应该时模进入式此模式
操作系访统问保护。代此码 外,特权模系式统复可位以和软自件由中断的响应时进入此模式
用保于护支切直持换接虚拟处切内理换存和器到/或模别存储式的器,模而式在用。AR户M7模TDM式I没不有能大用处
支持硬件协处理器的软件仿真 未定义指令异常响应时进入此模式
5
(2)异常模式
处理器模式 用户 (usr) 系统 (sys)
7
2.ARM微处理器的处理器改变方式
• ARM微处理器的运行模式可以通过软件改变(特权模式),也可以通过外部中断或异常 处理改变。
• 大多数的应用程序运行在用户模式下,当处理器运行在用户模式下时,某些被保护的 系统资源是不能被访问的。也不能改变模式。除非异常发生。
• 特权模式可以自由地访问系统资源和改变模式。
中止 (abt)
用于支持虚拟内存和/或存储器保护 在ARM7TDMI没有大用处
未定义 (und) 支持硬件协处理器的软件仿真
未定义指令异常响应时进入此模式
4
(1)特权模式
处理器模式 用户 (usr) 系系统统 (sy(ssy)s)
arm的工作原理
arm的工作原理ARM公司的处理器采用了RISC(精简指令集计算机)架构,即通过精简指令集来提高处理器的执行效率。
ARM处理器的工作原理可以大致分为以下几个步骤:1. 程序寄存器(Program Counter,PC)保存了当前正在执行的指令的地址。
处理器从PC中获取指令,并将PC值递增以指向下一条指令。
2. 指令缓存(Instruction Cache)负责存储最近使用的指令,以提高指令获取的速度。
如果需要执行的指令在指令缓存中已经存在,则可以直接从缓存中获取,避免了从内存中读取指令的延迟。
3. 指令解码器(Instruction Decoder)负责解析指令,并将其转换为相应的控制信号,以控制处理器的其他部件的操作。
解码器根据指令的类型和操作数,生成对应的操作码,将其发送到下面的执行阶段。
4. 执行单元(Execution Unit)负责执行指令的操作。
ARM处理器的执行单元包括算术逻辑单元(ALU)、乘法器、浮点运算器等,用于执行不同类型的指令。
执行单元接收控制信号和操作数,并执行相应的操作。
5. 访存单元(Memory Unit)用于与内存进行数据的读写操作。
ARM处理器支持多级缓存,数据缓存和指令缓存的操作可以在访存单元中完成。
6. 寄存器堆(Register File)保存了一些通用寄存器,用于存储和操作处理器的内部数据。
ARM的基本架构中有16个32位的通用寄存器,用于存储中间结果和计算过程中的变量。
7. 控制单元(Control Unit)负责控制处理器的整体工作。
控制单元接收来自解码器的控制信号,并根据需要调整指令流程,控制不同部件的工作模式和时序。
通过上述步骤,ARM处理器能够高效地执行指令,实现各种计算和数据处理操作。
这种基于RISC架构的设计使得ARM处理器具有较高的效能、低功耗和较小的芯片面积,因此广泛应用于移动设备、嵌入式系统和其他低功耗领域。
ARM处理器工作模式实验报告
肇庆学院电子信息与机电工程学院实验日期:2015 年11 月30 日班级:12电气1班:李俊杰学号:19 老师评定:____ _实验二:ARM处理器工作模式实验一、实验目的通过实验掌握学会使用MSR/MRS指令实现ARM处理器工作模式的切换,观察不同模式下的寄存器,加深对CPU结构的理解。
通过实验掌握ld中如何使用命令行指定代码段起始地址。
二、实验设备硬件:PC机。
软件:Embest IDE Pr0 2004集成开发环境,Windows 98/2000/NT/XP。
三、实验内容通过ARM汇编指令,在各种处理器模式下切换并观察各种模式下寄存器的区别。
掌握ARM不同模式的进入与退出。
四、实验原理1.ARM处理器模式ARM体系结构支持表3-2所列的7种处理器模式。
在软件控制下可以改变模式,外部中断或异常处理也可以引起模式发生改变。
大多数应用程序在用户模式下执行。
当处理器工作在用户模式时,正在执行的程序不能访问某些被保护的系统资源,也不能改变模式,除非异常发生。
这允许适当编写操作系统来控制系统资源的使用。
图2-1 除用户模式外的其他模式称为“特权模式”,它们可以自由地访问系统资源和改变模式。
其中的5种称为“异常模式”,即FIQ(Fast Interrupt Request)、IRQ(lnterrupt Request)、管理(Supervisor)、中止(Abort)和未定义(Undefined)。
当特定的异常出现时,进入相应的模式。
每种模式都有某些附加的寄存器,以避免异常出现时用户模式的状态不可靠。
剩下的模式是“系统模式”。
仅ARM体系结构V4以及以上的版本有该模式。
不能由于任何异常而进入该模式。
它与用户模式有完全相同的寄存器,但它是特权模式,不受用户模式的限制。
它供需要访问系统资源的操作系统任务使用,但希望避免使用与异常模式有关的附加寄存器。
避免使用附加寄存器保证了当任何异常出现时,都不会使任务的状态不可靠。
arm程序设计实验报告

arm程序设计实验报告ARM程序设计实验报告一、引言ARM(Advanced RISC Machine)是一种精简指令集计算机(RISC)架构。
在本次实验中,我们将学习和实践ARM程序设计的基本知识和技巧。
本报告将介绍实验的目标、步骤和结果,并对所学内容进行总结和思考。
二、实验目标本次实验的主要目标是通过编写ARM汇编程序,实现简单的功能。
具体来说,我们将学习如何使用ARM汇编语言编写程序,了解寄存器、指令和内存的基本概念,以及如何进行程序的调试和优化。
三、实验步骤1. 环境准备:安装ARM开发工具链,并配置开发环境。
2. 编写程序:根据实验要求,编写ARM汇编程序,实现指定的功能。
3. 调试与测试:使用模拟器或硬件平台,调试和测试编写的程序,确保程序的正确性和稳定性。
4. 优化改进:根据实验结果和性能要求,对程序进行优化改进,提高程序的效率和可靠性。
四、实验结果在本次实验中,我们成功完成了以下任务:1. 实现了一个简单的计算器程序,可以进行加减乘除运算,并输出结果。
2. 编写了一个字符串反转程序,可以将输入的字符串逆序输出。
3. 设计了一个简单的游戏程序,用户需要通过按键控制角色移动,避开障碍物。
通过以上实验,我们掌握了ARM汇编语言的基本语法和指令,了解了寄存器和内存的使用方法,以及如何进行程序的调试和优化。
同时,我们还学习了如何与外部设备进行交互,实现更复杂的功能。
五、实验总结通过本次实验,我们深入了解了ARM程序设计的基本原理和技巧。
ARM架构的精简指令集使得程序设计更加高效和灵活,适用于各种嵌入式系统和移动设备。
同时,ARM处理器的低功耗特性也使得其在无线通信、物联网等领域有着广泛的应用前景。
然而,ARM程序设计也存在一些挑战和难点。
首先,由于ARM汇编语言与高级语言相比,语法更为底层和复杂,需要更加深入地理解计算机硬件结构。
其次,ARM处理器的架构和指令集不同于传统的x86架构,需要重新学习和适应。
第三章(arm实验报告)
实验三3.1 实验目的初步学会使用Embest IDE for ARM 开发环境及ARM 软件模拟器;通过实验掌握简单ARM 汇编指令的使用方法。
实验内容熟悉开发环境的使用并使用ldr/str,mov 等指令访问寄存器或存储单元。
使用add/sub/lsl/lsr/and/orr 等指令,完成基本数学/逻辑运算。
3.2实验目的通过实验掌握使用ldm/stm,b,bl 等指令完成较为复杂的存储区访问和程序分支,学习使用条件码,加强对CPSR 的认识。
实验内容熟悉开发环境的使用并完成一块存储区的拷贝;完成分支程序设计,要求判断参数,根据不同参数,调用不同的子程序。
3.3 实验目的通过实验掌握ARM 处理器16 位Thumb 汇编指令的使用方法。
实验内容使用THUMB 汇编语言,完成基本的reg/mem 访问,以及简单的算术/逻辑运算;使用THUMB 汇编语言,完成较为复杂的程序分支,push/pop,领会立即数大小的限制,并体会ARM 与THUMB 的区别。
3.4实验目的通过实验掌握学会使用msr/mrs 指令实现ARM 处理器工作模式的切换,观察不同模式下的寄存器,加深对CPU 结构的理解;通过实验掌握ld 中如何使用命令行指定代码段起始地址。
实验内容通过ARM 汇编指令,在各种处理器模式下切换并观察各种模式下寄存器的区别;掌握ARM 不同模式的进入与退出。
3.5 实验目的学会使用Embest IDE 编写简单的C 语言程序并进行调试;学会编写和使用命令脚本文件;掌握通过memory/register/watch/variable 窗口分析判断运行结果。
实验内容利用命令脚本初始化栈指针,并使用c 语言完成延时函数。
3.6 实验目的掌握建立基本完整的ARM 工程,包含启动代码,连接脚本等;了解ARM7 启动过程,学会使用Embest IDE 编写简单的C 语言程序和汇编启动代码并进行调试;掌握链接脚本的作用;掌握如何指定代码入口地址与入口点;掌握通过memory/register/watch/variable 窗口分析判断结果。
嵌入式实验报告_ARM的串行口实验

嵌入式实验报告_ARM的串行口实验一、实验目的本次实验的主要目的是深入了解和掌握 ARM 处理器的串行口通信原理及编程方法。
通过实际操作和编程实践,能够实现基于 ARM 的串行数据收发功能,为后续在嵌入式系统中的应用打下坚实的基础。
二、实验原理串行通信是指数据一位一位地顺序传送。
在 ARM 系统中,串行口通常由发送器、接收器、控制寄存器等组成。
发送器负责将并行数据转换为串行数据并发送出去,接收器则将接收到的串行数据转换为并行数据。
控制寄存器用于配置串行口的工作模式、波特率、数据位长度、停止位长度等参数。
波特率是串行通信中的一个重要概念,它表示每秒传输的比特数。
常见的波特率有 9600、115200 等。
在本次实验中,需要根据实际需求设置合适的波特率,以保证数据传输的准确性和稳定性。
三、实验设备与环境1、硬件设备:ARM 开发板、USB 转串口线、电脑。
2、软件环境:Keil MDK 集成开发环境、串口调试助手。
四、实验步骤1、建立工程在 Keil MDK 中创建一个新的工程,选择对应的 ARM 芯片型号,并配置工程的相关参数,如时钟频率、存储分配等。
2、编写代码(1)初始化串行口首先,需要设置串行口的工作模式、波特率、数据位长度、停止位长度等参数。
例如,设置波特率为 115200,数据位长度为 8 位,停止位长度为 1 位。
(2)发送数据通过编写发送函数,将要发送的数据写入串行口的数据寄存器,实现数据的发送。
(3)接收数据通过中断或者查询的方式,读取串行口的接收寄存器,获取接收到的数据。
(4)主函数在主函数中,调用发送函数发送数据,并处理接收的数据。
3、编译下载编写完成代码后,进行编译,确保代码没有语法错误。
然后,将生成的可执行文件下载到 ARM 开发板中。
4、连接设备使用 USB 转串口线将 ARM 开发板与电脑连接起来,并在电脑上打开串口调试助手,设置与开发板相同的波特率等参数。
5、测试实验在串口调试助手中发送数据,观察开发板是否能够正确接收并回传数据。
ARM嵌入式实验报告

ARM嵌入式实验报告一、实验目的本次实验的目的是了解ARM嵌入式系统的基本概念、架构,并通过实际操作了解ARM嵌入式系统的软硬件调试方法和流程。
二、实验原理ARM(Advanced RISC Machines)是一种精简指令集计算(RISC)架构的处理器。
在嵌入式系统领域,ARM处理器具有低功耗、高性能、易扩展等特点,被广泛应用于移动设备、物联网等领域。
本次实验使用的是ARM Cortex-M系列处理器,其主要特点如下:1.低功耗:采用了先进的低功耗技术,适用于电池供电的嵌入式系统。
2.高性能:采用了指令流水线和乱序执行等技术,提高了处理器的运行效率。
3.易扩展:支持多核架构和内核扩展,满足不同应用的需求。
在实验中,我们将通过Keil MDK开发环境和ARM开发板进行ARM嵌入式系统的开发,实现简单的功能。
三、实验步骤1.硬件搭建:连接ARM开发板,通过USB进行电源供给和通信。
2. 软件配置:在Keil MDK中配置开发环境,包括选择芯片型号、设置编译器和调试器等。
3.编写程序:使用C语言编写嵌入式程序,通过调用ARM提供的库函数实现所需功能。
5.调试和测试:通过调试器对程序进行调试,并使用示波器等工具进行性能测试和验证功能的正确性。
四、实验结果经过实验,我们成功实现了一个简单的功能:通过按键控制LED灯的亮灭。
在按键按下的时候,LED灯会亮起,松开按键后,LED灯熄灭。
五、实验总结通过本次实验,我们深入了解了ARM嵌入式系统的基本概念和架构,并通过实际操作了解了ARM嵌入式系统的软硬件调试方法和流程。
掌握了Keil MDK开发环境的使用技巧,学会了使用ARM提供的库函数编写嵌入式程序。
同时,我们也注意到了ARM嵌入式系统具有低功耗、高性能和易扩展等特点,对于实际应用具有很大的潜力。
然而,本次实验只是一个简单的示例,还远远不能满足实际应用的需求。
在未来的学习中,我们将进一步学习ARM嵌入式系统的高级应用,包括操作系统移植、网络通信和多任务处理等方面的知识,以便更好地应对实际的项目开发需求。
ARM处理器工作模式实验报告材料
肇庆学院电子信息与机电工程学院实验日期:2015 年11 月30 日班级:12电气1班:俊杰学号:19 老师评定:____ _实验二:ARM处理器工作模式实验一、实验目的通过实验掌握学会使用MSR/MRS指令实现ARM处理器工作模式的切换,观察不同模式下的寄存器,加深对CPU结构的理解。
通过实验掌握ld中如何使用命令行指定代码段起始地址。
二、实验设备硬件:PC机。
软件:Embest IDE Pr0 2004集成开发环境,Windows 98/2000/NT/XP。
三、实验容通过ARM汇编指令,在各种处理器模式下切换并观察各种模式下寄存器的区别。
掌握ARM不同模式的进入与退出。
四、实验原理1.ARM处理器模式ARM体系结构支持表3-2所列的7种处理器模式。
在软件控制下可以改变模式,外部中断或异常处理也可以引起模式发生改变。
大多数应用程序在用户模式下执行。
当处理器工作在用户模式时,正在执行的程序不能访问某些被保护的系统资源,也不能改变模式,除非异常发生。
这允许适当编写操作系统来控制系统资源的使用。
图2-1除用户模式外的其他模式称为“特权模式”,它们可以自由地访问系统资源和改变模式。
其中的5种称为“异常模式”,即FIQ(Fast Interrupt Request)、IRQ(lnterrupt Request)、管理(Supervisor)、中止(Abort)和未定义(Undefined)。
当特定的异常出现时,进入相应的模式。
每种模式都有某些附加的寄存器,以避免异常出现时用户模式的状态不可靠。
剩下的模式是“系统模式”。
仅ARM体系结构V4以及以上的版本有该模式。
不能由于任何异常而进入该模式。
它与用户模式有完全相同的寄存器,但它是特权模式,不受用户模式的限制。
它供需要访问系统资源的操作系统任务使用,但希望避免使用与异常模式有关的附加寄存器。
避免使用附加寄存器保证了当任何异常出现时,都不会使任务的状态不可靠。
浅谈ARM体系CPU的7种工作模式

浅谈ARM体系CPU的7种工作模式有37个寄存器,其中31个通用寄存器,6个状态寄存器。
本文主要研究的是ARM体系的CPU的7种工作模式。
一、存储器格式(字对齐)Arm体系结构将存储器看做是从零地址开头的字节的线性组合。
从零字节到三字节放置第一个存储的字(32位)数据,从第四个字节到第七个字节放置其次个存储的字数据,一次罗列。
作为32位的微处理器,arm体系结构所支持的最大寻址空间为4GB。
存储器格式1、大端格式:高字节在低地址,低字节在高地址;2、小端格式:高字节在高地址,低字节在低地址。
命令长度Arm微处理器的命令长度是32位的,也可以为16位(thumb状态下)。
Arm微处理器中支持字节(8位),半字(16位),字(32位)三种数据类型,其中,字需要4字节对齐,半字需要2字节对齐。
注:所谓的命令长度是一条完整的命令的长度,而不是单纯的mov这3个字母长度。
浅谈ARM体系CPU的7种工作模式二、ARM体系的CPU有两种工作状态1、ARM状态:处理器执行32位的字对齐的ARM命令;2、Thumb状态:处理器执行16位的、半字对齐的Thumb命令。
在程序运行的过程中,可以在两种状态之间举行相应的转换。
处理器工作状态的改变并不影响处理器的工作模式和相应寄存器中的内容。
CPU上电处于ARM状态。
三、ARM体系的CPU有以下7种工作模式1、用户模式(Usr):用于正常执行程序;2、迅速中断模式(FIQ):用于高速数据传输;3、外部中断模式(IRQ):用于通常的中断处理;4、管理模式(svc):操作系统用法的庇护模式;5、数据拜访终止模式(abt):当数据或命令预取终止时进入该模式,可用于虚拟存储以及存储庇护。
6、系统模式(sys):运行具有特权的操作系统任务;7、未定义命令中止模式(und):当未定义的命令执行时进入该模式,可用于支持硬件。
CPU的模式可以容易的理解为当前CPU的工作状态,比如:当前操作系统正在执行用户程序,那么当前CPU工作在用户模式,这时网卡上有数据到达,产生中断信号,CPU自动切换到普通中断模式下处理网卡数据(一般应用程序没有权限挺直拜访硬件),处理完网卡数据,返回到用户模式下继续执行用户程序。
ARM9实验报告(一)
实验一ARM串行口实验一、实验目的1.掌握ARM的串行口工作原理2.学习编程实现ARM的UART通讯3.掌握S3C2410寄存器配置方法。
二、预备知识1.了解EWARM集成开发环境的基本功能2.学习串口通讯的基本知识3.熟悉S3C2410串口有关的寄存器三、实验设备1.2410s教学实验箱2.ARM920T的JTAG仿真器3.ARM EWARM5.3集成开发环境4.串口连接线四、实验内容1.熟悉打开已有工程的步骤,掌握仿真调试的方法。
2.建立一个新工程,熟练掌握编译器和链接器的设置方法。
3.从串口输入字符串,将0~9数字在超级终端上连续显示,“Enter”键换行。
4.将第三步得到的字符转换成BCD码,限制在0~1023,用于控制直流电机。
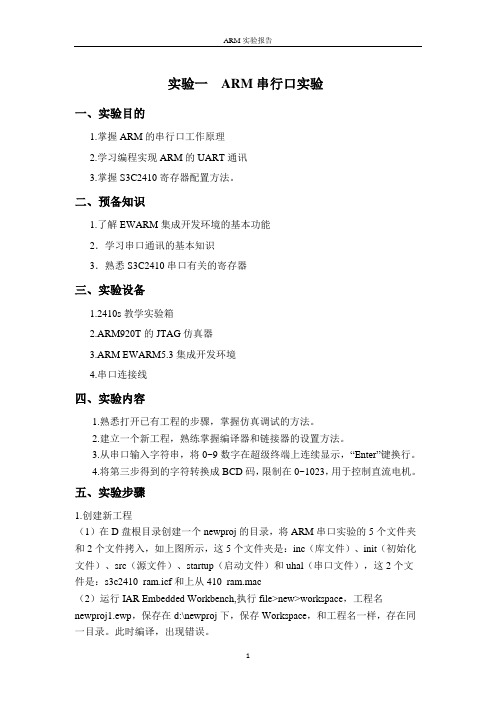
五、实验步骤1.创建新工程(1)在D盘根目录创建一个newproj的目录,将ARM串口实验的5个文件夹和2个文件拷入,如上图所示,这5个文件夹是:inc(库文件)、init(初始化文件)、src(源文件)、startup(启动文件)和uhal(串口文件),这2个文件是:s3c2410_ram.icf和上从410_ram.mac(2)运行IAR Embedded Workbench,执行file>new>workspace,工程名newproj1.ewp,保存在d:\newproj下,保存Workspace,和工程名一样,存在同一目录。
此时编译,出现错误。
(3)有3个头文件做以下修改:#include “../inc/macro.h”,#include“../inc/drivers.h“,#include ”../uhal/isr.h“ General Option>Library configuration选Full,C/C++ Compiler>Code>Processor mode选ARM,编译通过。
(4)选CPU,选仿真器RDI、“Run to Main”打勾、选mac文件s3c2410_ram.mac,选链接器配置文件s3c2410_ram.icf,配置仿真器的动态链接库H-JTAG.dll,IAR 生成的out文件供RDI等仿真器使用,通过输出转换可生成bin文件,供vivi 烧写Flash使用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ARM处理器工作模式实验
一、实验目的
通过实验掌握学会使用MSR/MRS指令实现ARM处理器工作模式的切换,观察不同模式下的寄存器,加深对CPU结构的理解。
通过实验掌握ld中如何使用命令行指定代码段起始地址。
二、实验设备
硬件:PC机。
软件:Embest IDE Pr0 2004集成开发环境,Windows 98/2000/NT/XP。
三、实验内容
通过ARM汇编指令,在各种处理器模式下切换并观察各种模式下寄存器的区别。
掌握ARM不同模式的进入与退出。
四、实验原理
1.ARM处理器模式
ARM体系结构支持表3-2所列的7种处理
器模式。
在软件控制下可以改变模式,外部中断或
异常处理也可以引起模式发生改变。
大多数应用程序在用户模式下执行。
当处理器工作在用户模式时,正在执行的程序不能访问某些被保护的系统资源,也不能改变模式,除非异常发生。
这允许适当编写操作系统来控制系统资源的使用。
除用户模式外的其他模式称为“特权模式”,它们可以自由地访问系统资源和改变模式。
其中的5种称为“异常模式”,即FIQ(Fast Interrupt Request)、IRQ(lnterrupt Request)、管理(Supervisor)、中止(Abort)和未定义(Undefined)。
当特定的异常出现时,进入相应的模式。
每种模式都有某些附加的寄存器,以避免异常出现时用户模式的状态不可靠。
剩下的模式是“系统模式”。
仅ARM体系结构V4以及以上的版本有该模式。
不能由于任何异常而进入该模式。
它与用户模式有完全相同的寄存器,但它是特权模式,不受用户模式的限制。
它供需要访问系统资源的操作系统任务使用,但希望避免使用与异常模式有关的附加寄存器。
避免使用附加寄存器保证了当任何异常出现时,都不会使任务的状态不可靠。
2.程序状态寄存器
3.2节提到的程序状态寄存器CPSR和SPSR包含了条件码标志、中断禁止位、当前处理器模式以及其他状态和控制信息。
每种异常模式都有一个程序状态保存寄存器SPSR。
当异常出现时,SPSR用于保留CPSR的状态。
3.本实验涉及到的Id命令行参数
-Ttext org
使用org作为输出文件的text段的起始地址。
org必须是十六进制数。
实验操作步骤
(1)参考3.1节实验A的步骤(1)建立一个新的工程,命名为ARMMode。
(2)参考3.1节实验A的步骤(2)和实验参考程序编辑输入源代码。
编辑完毕后,保存文件为ARMMode.s。
(3)选择菜单项Project- Add To Project- Files,或在工程管理窗口右击选择快搪菜单命令,打开文件选择对话框,在工程目录下选择刚才建立的源文件ARMMode.s。
(4)参考3.1节实验A的步骤(4)进行相应设置。
注意:在链接器设置选项卡的Link Options框内,手动加上“-Ttext Ox0”,即指定代码段起始地址为Ox0,如图3-8所示。
(5)参考3.1节实验A的步骤(5)生成目标代码。
(6)在调试设置选项卡中的Download address文本框内,输入的下载地址应该与链接器设置中指定的代码段起始地址相同,以保证程序能够正常执行,如图3-9所示。
(7)选择菜单项Debug—Remote Connect连接软件仿真器,执行Download命令下载程序,并打开寄存器窗口。
(8)单步执行,观察并记录寄存器RO和CPSR值的变化,以及每次变化后执行寄存器赋值后36个寄存器值的变化情况,尤其注意各个模式下R13和R14的值。
结合实验内容和相关资料,观察程序运行,通过实验加深理解ARM各种状态下寄存器的使用。
理解和掌握试验后,完成实验练习题。
五、实验结果
实验参考程序
.global _start
.text
_start:
b Reset_Handler Undefined_Handler:
b Undefined_Handler
b SWI_Handler Prefetch_Handler:
b Prefetch_Handler Abort_Handler:
b Abort_Handler
nop /* Reserved vector */
IRQ_Handler:
b IRQ_Handler
FIQ_Handler:
b FIQ_Handler
SWI_Handler:
mov pc, lr
Reset_Handler:
mrs r0,cpsr /* read CPSR value */
bic r0,r0,#0x1f /* clear low 5 bit */
orr r0,r0,#0x1f /* set the mode as System mode */
msr cpsr,r0 /* write the data into CPSR */
mov r0, #1 /* initialization the register in System mode */ mov r1, #2
mov r2, #3
mov r3, #4
mov r4, #5
mov r5, #6
mov r6, #7
mov r7, #8
mov r8, #9
mov r9, #10
mov r10, #11
mov r11, #12
mov r12, #13
mov r13, #14
mov r14, #15
/* into FIQ mode */ mrs r0,cpsr
bic r0,r0,#0x1f
orr r0,r0,#0x11 /* set the mode as FIQ mode */
msr cpsr,r0
mov r8, #16 /* initialization the register in FIQ mode */ mov r9, #17
mov r10, #18
mov r11, #19
mov r12, #20
mov r13, #21
mov r14, #22
/* into SVC mode */
mrs r0,cpsr
bic r0,r0,#0x1f
orr r0,r0,#0x13 /* set the mode as SVC mode */
msr cpsr,r0
mov r13, #23 /* initialization the register in SVC mode */ mov r14, #24
/* into Abort mode */
mrs r0,cpsr
bic r0,r0,#0x1f
orr r0,r0,#0x17 /* set the mode as Abort mode */
msr cpsr,r0
mov r13, #25 /* initialization the register in Abort mode */ mov r14, #26
/* into IRQ mode */
mrs r0,cpsr
bic r0,r0,#0x1f
orr r0,r0,#0x12 /* set the mode as IRQ mode */
msr cpsr,r0
mov r13, #27 /* initialization the register in IRQ mode */ mov r14, #28
/* into UNDEF mode */ mrs r0,cpsr
bic r0,r0,#0x1f
orr r0,r0,#0x1b /* set the mode as UNDEF mode */
msr cpsr,r0
mov r13, #29 /* initialization the register in UNDEF mode */
mov r14, #30
b Reset_Handler
.end
总结:
通过此次实验学会了使用MSR/MRS指令实现ARM处理器工作模式的切换,观察不同模式下的寄存器,加深了对CPU结构的理解,同时掌握了ld中如何使用命令行指定代码段起始地址。