Atmega8515单片机多机通信硬件电路设计
单片机多机通信课程设计
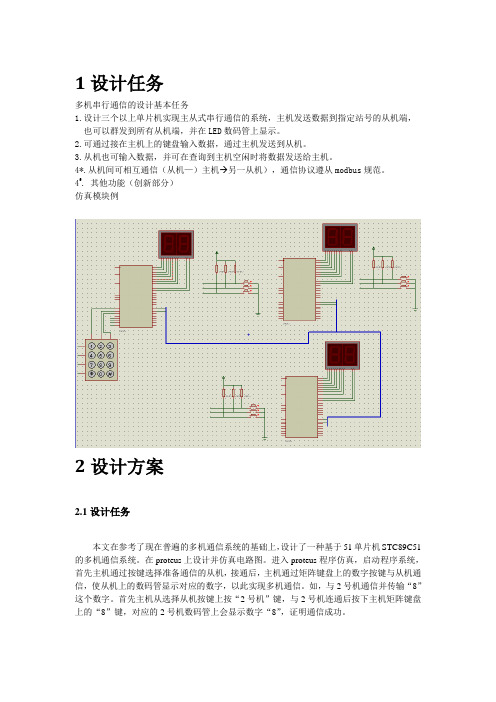
1设计任务多机串行通信的设计基本任务1.设计三个以上单片机实现主从式串行通信的系统,主机发送数据到指定站号的从机端,也可以群发到所有从机端,并在LED数码管上显示。
2.可通过接在主机上的键盘输入数据,通过主机发送到从机。
3.从机也可输入数据,并可在查询到主机空闲时将数据发送给主机。
4*.从机间可相互通信(从机—)主机 另一从机),通信协议遵从modbus规范。
4@. 其他功能(创新部分)仿真模块例2设计方案2.1设计任务本文在参考了现在普遍的多机通信系统的基础上,设计了一种基于51单片机STC89C51的多机通信系统。
在proteus上设计并仿真电路图。
进入proteus程序仿真,启动程序系统,首先主机通过按键选择准备通信的从机,接通后,主机通过矩阵键盘上的数字按键与从机通信,使从机上的数码管显示对应的数字,以此实现多机通信。
如,与2号机通信并传输“8”这个数字。
首先主机从选择从机按键上按“2号机”键,与2号机连通后按下主机矩阵键盘上的“8”键,对应的2号机数码管上会显示数字“8”,证明通信成功。
2.2串行通信简介串行通信可以分为同步通信和异步通信两类。
同步通信是一种连续串行传送数据的通信方式,一次通信只传送一帧信息。
这里的信息帧与异步通信中的字符帧不同,通常含有若干个数据字符。
它们均由同步字符、数据字符和校验字符(CRC)组成。
其中同步字符位于帧开头,用于确认数据字符的开始。
数据字符在同步字符之后,个数没有限制,由所需传输的数据块长度来决定;校验字符有1到2个,用于接收端对接收到的字符序列进行正确性的校验。
同步通信的缺点是要求发送时钟和接收时钟保持严格的同步。
异步通信中,在异步通行中有两个比较重要的指标:字符帧格式和波特率。
数据通常以字符或者字节为单位组成字符帧传送。
字符帧由发送端逐帧发送,通过传输线被接收设备逐帧接收。
发送端和接收端可以由各自的时钟来控制数据的发送和接收,这两个时钟源彼此独立,互不同步。
基于嵌入式ATmega8515的脉搏检测与无线传输系统研究

1 总体 设 计 方 案
结 合嵌 入式 与无 线传 输等相 关 技术 .提 出 了一种 基 于嵌入 式 的无 线脉 搏 传输 与检 测 系统 .使用 下位 机 通 过光 电传感 器 提取 手 腕脉 搏 信号 , 用 嵌 入式 A T me g a 8 5 1 5处理 脉 搏信 号 , 通 过 无线 收 发模 块 远距 离 传送 , 并在 P C机 上 采用 L a b V I E W 界 面显 示 人体 温 度 、 脉搏 信 号 波形 信 号 和脉搏 频 率 。 也 能 够形 成 能 远 程监 测 人 体 脉搏 的 系统 , 为 医生 的诊 断提供 有 效 的数据 基础 , 如图 1 所示 .
2 . 1 . 1 脉 搏 传 感 器
由于 脉搏信 号 属于 主动信 号 , 信号 幅度 很小 , 而 且极 容 易受 到人 体 其它 低频 假 象信 号 的干 扰 . 假 象 干扰
信 号有 时 比所需 的信 号强 得 多 , 因此选 择测 量传 感器 对 脉搏 信号 的提取 最 为关键 .我 们采 用 B P W8 3型透射
作者 简 介 : 张志 通 ( 1 9 8 3 一 ) , 男, 河北青县人 , 讲师 , 主 要 从 事 电 子 与 检测 技 术 研 究
6
石 家 庄 学 院 学 报
2 0 1 4年 5月
2 硬 件 电路 设 计
2 . 1 下 位 机 部 分
通常 , 人 体脉 搏所 呈 现 出的波 形 、 强度 、 振幅 、 频 率等 信 息 , 很 大 程度 上 反映 出人 体 心血 管 系统 中许 多生 理病理 的血流特 征 .然而 , 人体 的生 物信 号多 属于 强 噪声 背景 下 的低 频 弱信 号 . 需 要 选择 合适 的硬件 参 数 和 设 计相 应 的调理 电路 来保 证 检测 到脉搏 信号 的准确 性【 ” .
AVR单片机AT90 S8515控制系统中步进电机的驱动控制
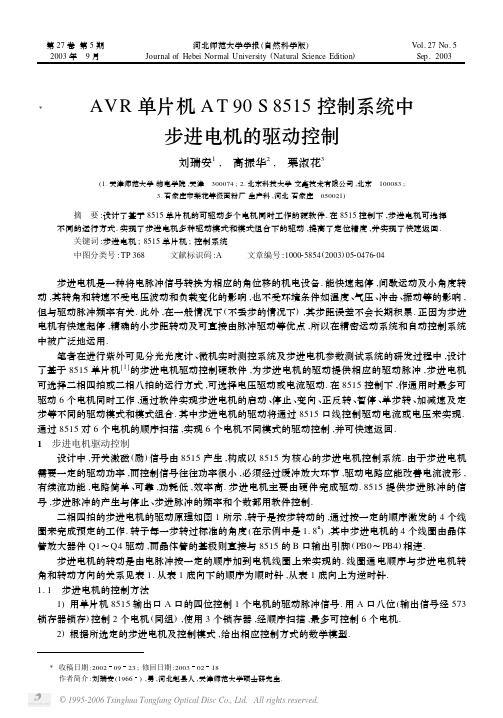
ΞAVR 单片机A T 90S 8515控制系统中步进电机的驱动控制刘瑞安1, 高振华2, 栗淑花3(1.天津师范大学物电学院,天津 300074;2.北京科技大学文鑫技术有限公司,北京 100083;3.石家庄市梨花等级面粉厂生产科,河北石家庄 050021)摘 要:设计了基于8515单片机的可驱动多个电机同时工作的硬软件.在8515控制下,步进电机可选择不同的运行方式.实现了步进电机多种驱动模式和模式组合下的驱动,提高了定位精度,并实现了快速返回.关键词:步进电机;8515单片机;控制系统中图分类号:TP 368 文献标识码:A 文章编号:100025854(2003)0520476204步进电机是一种将电脉冲信号转换为相应的角位移的机电设备.能快速起停,间歇运动及小角度转动,其转角和转速不受电压波动和负载变化的影响,也不受环境条件如温度、气压、冲击、振动等的影响,但与驱动脉冲频率有关.此外,在一般情况下(不丢步的情况下),其步距误差不会长期积累.正因为步进电机有快速起停,精确的小步距转动及可直接由脉冲驱动等优点,所以在精密运动系统和自动控制系统中被广泛地运用.笔者在进行紫外可见分光光度计、微机实时测控系统及步进电机参数测试系统的研发过程中,设计了基于8515单片机[1]的步进电机驱动控制硬软件,为步进电机的驱动提供相应的驱动脉冲,步进电机可选择二相四拍或二相八拍的运行方式,可选择电压驱动或电流驱动.在8515控制下,作通用时最多可驱动6个电机同时工作,通过软件实现步进电机的启动、停止、变向、正反转、暂停、单步转、加减速及定步等不同的驱动模式和模式组合.其中步进电机的驱动将通过8515口线控制驱动电流或电压来实现.通过8515对6个电机的顺序扫描,实现6个电机不同模式的驱动控制,并可快速返回.1 步进电机驱动控制设计中,开关激磁(励)信号由8515产生,构成以8515为核心的步进电机控制系统.由于步进电机需要一定的驱动功率,而控制信号往往功率很小,必须经过缓冲放大环节,驱动电路应能改善电流波形,有续流功能,电路简单、可靠,功耗低,效率高.步进电机主要由硬件完成驱动.8515提供步进脉冲的信号,步进脉冲的产生与停止、步进脉冲的频率和个数都用软件控制.二相四拍的步进电机的驱动原理如图1所示,转子是按步转动的,通过按一定的顺序激发的4个线圈来完成预定的工作.转子每一步转过标准的角度(在示例中是1.8°),其中步进电机的4个线圈由晶体管放大器件Q1~Q4驱动,而晶体管的基极则直接与8515的B 口输出引脚(PB0~PB4)相连.步进电机的转动是由电脉冲按一定的顺序加到电机线圈上来实现的.线圈通电顺序与步进电机转角和转动方向的关系见表1.从表1底向下的顺序为顺时针,从表1底向上为逆时针.1.1 步进电机的控制方法1)用单片机8515输出口A 口的四位控制1个电机的驱动脉冲信号.用A 口八位(输出信号经573锁存器锁存)控制2个电机(同组),使用3个锁存器,经顺序扫描,最多可控制6个电机.2)根据所选定的步进电机及控制模式,给出相应控制方式的数学模型.Ξ收稿日期:20020923;修回日期:20030218作者简介:刘瑞安(1966),男,河北赵县人,天津师范大学硕士研究生.第27卷第5期2003年 9月河北师范大学学报(自然科学版)Journal of Hebei Normal University (Natural Science Edition )Vol.27No.5Sep.2003图1 步进电机驱动原理示意图 表1 步进电机驱动动序stepQ4Q3Q2Q110101210013101040110101011.2 步进电机的供电方式1)二相四拍(A ,B ,C ,D )驱动时,采用两相励磁,供电方式相应控制为(AB —BC —CD —DA —AB ),旋转方向相反,取相反通电顺序.两相励磁的总电流增大2倍,最高启动频率增大,能获得高转速.2)二相八拍驱动时,采用一、二相励磁,供电方式相应控制为(A —AB —B —BC —C —CD —D —DA —A ),旋转方向相反取相反通电顺序.一、二相励磁,步矩变小.1.3 步进电机的驱动及保持采用电压驱动时,为了使启动时得到较大的转矩,要求流经电机绕组的电流快速上升,采用高电压驱动(系统所用电机的额定电压为12V ),驱动时用12V ,维持时用3~5V 来提供维持电流.电源的选择通过8515的口线控制来实现.1.4 步进电机的变速应用为提高控制系统的性能,即提高运行速度,并使步进电机不失步,电机运行可采用变速控制[2].步进电机的响应频率一般较低,且对空载的最高启动频率有所限制.根据步进电机的矩频特性可知,启动频率越高,启动转矩越小,带动负载的能力越差.当步进电机启动后,进入稳态时的工作频率又远大于启动频率.考虑到步进电机的负载驱动,一个静止的步进电机不可能一下子稳定到较高的工作频率,可以在启动时,以较低的频率(低于响应频率)的速率运行,然后慢慢加速,加速到一定速率后,就以一定速率恒速运行,当要到终点时,又使其慢慢减速,在低于响应频率的速率下运行,直到走完规定的步数后停机.即起动频率低,中间频率高,控制到位时再减速.这样步进电机以最快的速度走完所规定的步数而不出现失步.1.5 几种变速控制方法1)改变控制方式的变速控制由二相四拍和二相八拍不同的驱动方式,进行变速控制.2)均匀地改变脉冲时间间隔的变速控制按一定的时间间隔输出不同控制字,在加速控制中,可以均匀地减少延时时间间隔,在减速控制中,可以均匀地增加延时时间间隔.这种方法的优点在于:由于延时的长短不受限制,使步进电机的工作频率范围较宽.3)采用定时器的变速控制为了提高单片机的工作效率,可以用8515的内部定时器(TIM E0或TIM E1)来提供延时时间,将定时器初始化后,每隔一定时间,由定时器向CPU 申请1次中断,CPU 响应中断后,便发出1次控制脉冲,只要均匀地改变定时器的时间常数,即可达到均匀加速或减速的目的.单片机在内存中开辟专用的单元存放步进电机的运动参数,包括转动模式、转动方向、转动速度等.2 步进电机各种运动模式驱动流程判断旋转方向;判断是否加、减速,并对驱动工作频率进行相应设置;判断时刻到否;按顺序传送控制脉冲;判断所要求的控制步数是否传送完毕,从而控制步进电机的转动,以达到控制转动角度和位移774第5期刘瑞安等:AVR 单片机A T 90S 8515控制系统中步进电机的驱动控制的目的.首先从内存单元调电机参数,根据驱动模式对参数进行相应的设置,例如加、减速的设置,根据指定的最大频率及最小频率,由8515单片机根据要运行的步数进行智能处理,决定其加减速方式,在不同的时刻设置相应的驱动工作频率;随后进行旋转方向的判别,转到相应的正、反向控制程序;然后根据指定的四拍还是八拍取出控制字,控制模型按顺序存放在内存单元中,四拍控制字取5f ,9f ,af ,6f ,八拍控制字取5f ,1f ,9f ,8f ,af ,2f ,6f ,4f ;对6个电机顺序扫描,分别按要求的控制顺序输出相应的控制模型,送A 口,根据电机号,使能相应的锁存器,再加上脉宽延时程序即可.扫描1次仅需约300μs (6个电机,4MHz 晶振下时,8MHz 晶振下时需约150μs ).由于系统对步进电机驱动要求驱动脉冲的宽度要有较高2的精度,所以对单片机软件编程的合理性要求也相应地提高,具体流程如图2所示.图2 步进电机各种运动模式驱动流程874河北师范大学学报(自然科学版)第27卷步进电机驱动控制模块具有较高的移植性,它已成功地运用于紫外可见分光光度计、微机实时测控系统及步进电机参数测试系统,也可以移植到其他的基于8515单片机的测控系统中,使其具有定位精度高、可快速返回和较高的智能性.参考文献:[1] 宋建国.AVR 单片机原理及应用[M ].北京:北京航天航空大学出版社,1998.8260.[2] 雷海波.用微机和单片机控制步进电机的走动[J ].微计算机信息,2000,16(5):30232.Step 2motor Drive Control in the AT 90S 8515Single 2slice Process Control SystemL IU Rui 2an 1, G AO Zhen 2hua 2, L I Shu 2hua 3(1.College of Physics and Electric ,Tianjin Normal University ,Tianjin 300074China ;2.Wenxin Inc ,Beijing University of Science and Technology ,Beijing 100083,China ;3.Production Section ,Shijiazhuang Lihua Grade Flour Mill ,Hebei Shijiazhuang 050021,China )Abstract :The common hardware and software were designed ,which can drive motors to work at the same time.Controlled by the A T 90S 8515micro controller ,a stepping motor can choose different run 2modes.The use of the designed system can improve location precision of the motor.Motor drive can return quickly.K ey w ords :step 2motor ;8515single 2slice process ;control system(责任编辑 刘新喜)(上接第446页)A Nonlinear Boundary V alue Problem with Conjugationfor G eneralized Biregular Function V ectorsXIE Y ong 2hong , L IU Qiu 2ju(College of Mathematics and Information Sciences ,Hebei Normal University ,Hebei Shijiazhuang 050016,China )Abstract :With the help of integral equations and Schauder fixed pointed theorem ,the existence of the solution and the integral expression of the solution to the nonlinear bonndary value problem with conjugation for the generalized biregular function vectors in Clifford analysis are considered.K ey w ords :real Clifford analysis ;generalized biregular function vector ;nonlinear boundary value prob 2lem with conjugation(责任编辑 白占立)974第5期刘瑞安等:AVR 单片机A T 90S 8515控制系统中步进电机的驱动控制。
基于51单片机的多机通信系统设计
基于51单片机的多机通信系统设计多机通信系统是指通过一台主机与多台从机之间进行数据交互和通信的系统。
在本设计中,我们将使用51单片机实现一个基于串行通信的多机通信系统。
系统硬件设计如下:1.主机:使用一个51单片机作为主机,负责发送数据和接收数据。
2.从机:使用多个51单片机作为从机,每个从机负责接收数据和发送数据给主机。
3.串口:主机和从机之间通过串口进行通信。
我们可以使用RS232标准通信协议。
系统软件设计如下:1.主机设计:a.初始化串口:设置串口参数,如波特率、数据位、停止位等。
b.发送数据:将需要发送的数据存储在发送缓冲区中,通过串口发送给从机。
c.接收数据:接收从机发送的数据,并存储在接收缓冲区中。
2.从机设计:a.初始化串口:设置串口参数,如波特率、数据位、停止位等。
b.接收数据:接收主机发送的数据,并存储在接收缓冲区中。
c.发送数据:将需要发送的数据存储在发送缓冲区中,通过串口发送给主机。
系统工作流程如下:1.主机启动,执行初始化操作,包括初始化串口。
2.从机启动,执行初始化操作,包括初始化串口。
3.主机发送数据给从机:主机将需要发送的数据存储在发送缓冲区中,通过串口发送给从机。
4.从机接收并处理数据:从机接收主机发送的数据,并存储在接收缓冲区中,对接收到的数据进行处理。
5.从机发送数据给主机:从机将需要发送的数据存储在发送缓冲区中,通过串口发送给主机。
6.主机接收并处理数据:主机接收从机发送的数据,并存储在接收缓冲区中,对接收到的数据进行处理。
7.主机和从机循环执行步骤3-6,实现多机之间的数据交互和通信。
多机通信系统的设计考虑到以下几个方面:1.硬件设计:需要合理选择单片机和串口的类型和参数,确保系统的稳定性和可靠性。
2.软件设计:需要设计适应系统需求的通信协议和数据处理提取方法,保证数据的准确性和完整性。
3.通信协议:需要定义主机和从机之间的通信协议,包括数据的格式、传输方式等,以便实现正确的数据交互。
基于AT90S8515的串行通信及其应用

12 A T的主要寄存器及设置 . R U
}C U } O一 { 一 R} D 二一 X 二一E R 一} } R
位 7 CU R 接收完成, — R :AT X 当使用中断数 据接收时, 接收完成中断子程序必须读 U R D 而消除
位 7 X I: — RC R E X完成中断使能, 当该位置 1 且 SE R G中的I 位设为 1 在 UR中设置 R C 时, S X位 将导致接收完成中断被执行; 位6 T I T 完成中断使能, C : - X E X 当该位置 1 且 SE R G中的 I 位设为 1 在 UR中设置 T C 时, S X位 将导致发送完成中断被执行;
2 1
U R 波特率寄存器的值(一 5) AT 0 25。例如, 波特率确 定为 9 0 6 波特时, 0 选用标准的晶振频率 183M z . H 42 ( 误差为0, )则可计算出U R BR的初始化值为 1; 1波 特率确定为 9 0波特 时选用 晶振频率 为 3 6 0 . 66M z BR的初始化值为20 84 H, UR 3 2 T081与上位P 机的串行通信应用 A9S5 5 C
位5 数据寄存器空中断使 R : T — U I UR D E A
能, 当该位置 1 SE 且 RG中的 I 位设为 1 在 UR 时, S
中设置 U RE位将导致发送 U R DI A T数据寄存器空
万方数据
位3 O : R超越出错, U R寄存器的数据 - 当 D 没有在新的数据被移人到接收移位寄存器之前被读 走, 该位置 1即O , R位被缓冲。意味着移人移位寄 存器的最后数据字节不能被送到 U R中而丢失。 D 1 . 波特率发生器 .3 2 依据以 下等式的分频器产生波特率: BU =/ 6U R 1] 1(BR+ ) AD f [ BU A D表示波特率,为晶振频率;BR表示 f UR
AT89C51设计
AT89C51设计1. 简介AT89C51是一种经典的8位单片机,由凯瑞电子(Keil)公司生产。
它是Intel 8051指令集架构的一部分,具有强大的功能和广泛的应用。
AT89C51具有51个I/O引脚,4KB flash存储器,128字节的RAM,以及4个8位定时器/计数器。
它适用于各种嵌入式系统,如家电控制,电子设备,工业自动化,安全系统等。
本文将分享AT89C51的设计相关知识,包括硬件配置、编程语言和开发工具等内容。
2. 硬件配置AT89C51的硬件配置包括以下几个方面:2.1. 晶体振荡器AT89C51支持外部晶体振荡器,用于提供时钟信号。
一般情况下,使用11.0592MHz的晶体振荡器可以满足大多数应用需求。
2.2. 电源AT89C51工作电压为4.5V至5.5V,可以通过外部电源供电。
在设计中,需要提供稳定的电源电压,并通过适当的电源滤波电路降低电源噪音。
2.3. 外部存储器AT89C51内置4KB的闪存和128字节的RAM。
如果需要更大的存储空间,可以通过外部存储器扩展。
此外,还可以通过外部EEPROM实现数据的长期存储。
2.4. 输入/输出设备AT89C51具有51个I/O引脚,可用于连接各种输入/输出设备,如LED,键盘,LCD显示器等。
在设计中,需要根据具体需求配置合适的输入/输出设备。
3. 编程语言AT89C51支持多种编程语言,如汇编语言和C语言。
以下将介绍两种常见的编程语言。
3.1. 汇编语言汇编语言是一种符号化的低级语言,直接操作计算机硬件。
AT89C51使用的汇编语言是51系列的汇编语言,具有良好的指令集和寻址模式。
以下是一个简单的AT89C51汇编代码示例:ORG 0HMOV A, #20HMOV P1, AEND3.2. C语言C语言是一种高级编程语言,具有结构化的特点,能够更方便地编写和维护代码。
AT89C51的C语言编程通常使用凯瑞电子(Keil)公司的Keil C编译器。
单片机AT90S8515与PC的通讯
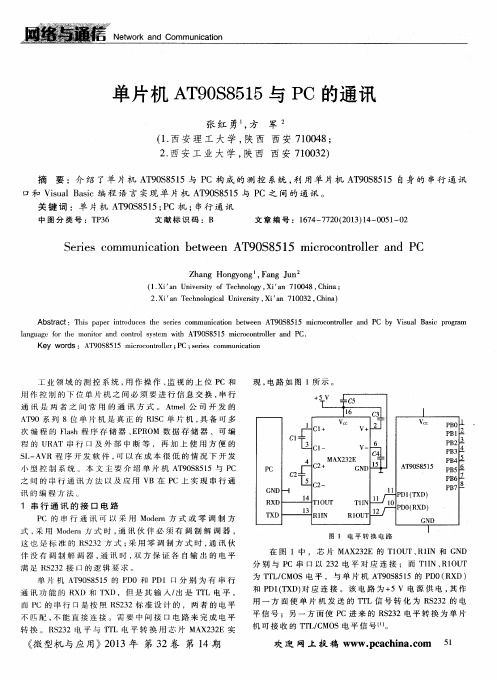
Ab s t r a c t :T h i s p a p e r i n t r o d u c e s t h e s e r i e s c o mmu n i c a t i o n b e t w e e n AT 9 0 S 8 5 1 5 mi c r o c o n t r o l l e r a n d P C b y Vi s u a l B a s i c p r o g r a m
MAX2 3 2 E
P C
l c 4 I =
0 阳 l 2 3 邝 4 阳 5 飓 6 7 阳
AT9 0 S 8 u 5 1 5 一 — — 一
小 型 控 制 系 统 。本 文 主 要 介 绍 单 片 机 AT 9 0 S 8 5 1 5与 P C
+ 一
= = 1 ●
£ ; £ } + 一
l a n g u a g e f o r t h e mo n i t o r a n d c o n t r o l s y s t e m wi t h AT 9 0 S 8 5 1 5 mi c r o c o n t r o l l e r a n d P C. Ke y wor d s:AT 9 0 S 8 5 1 5 mi c r o c o n t r o l l e r ; P C; s e r i e s c o mmu n i c a t i o n
Z h a n g Ho n g y o n g , F a n g J u n
( 1 . X i a n U n i v e r s i t y o f T e c h n o l o g y, X i a n 7 1 0 0 4 8, C h i n a 2 . X i a n T e c h n o l o g i c a l U n i v e s r i t y , X i a n 7 1 0 0 3 2, C h i n a )
基于单片机的自动洗衣机设计

基于单片机的自动洗衣机设计基于单片机的自动洗衣机设计1 总体方案设计分析1.1全自动洗衣机控制方法选择在全自动洗衣机中,现在比较通用的控制手段是利用单片机或者PLC两种方法,本课设选用的是单片机。
之所以选用单片机主要考虑了以下原因,首先,单片机具有较强的抗干扰能力,当受到外部强干扰,程序出错时,可以自动使系统复位重新执行程序。
并且采用无噪声、无电磁干扰的双向晶闸管作为控制元件,控制电磁阀和电机。
其次,单片机具有欠压和过压保护,欠压时,控制器不工作;超压时,保护电路起作用。
再次,单片机还具有瞬间掉电保护功能,电源短时间停电后,电压恢复时,能够维持原来运行程序的工作状态并继续完成洗衣程序。
最后,各种操作和洗衣机的运行状态均可以用LED显示。
此外,在硬件规模方面,单片机相当于将一个基本规模的单板机所具有的资源复合在一块芯片上,因此具有相当的规模;在功能方面,单片机已经超过了PLC的功能;在指令系统方面,如果将单片机的指令系统PLC的指令系统相比较,除单片机的数据传送能力较弱一点之外,单片机的指令系统已大大超过PLC;此外,无论在性价比方面,还是在体积、重量方面相比较,单片机都比PLC优越得多。
综合上述原因本章设采用单片机来完成。
二、方案构思全自动洗衣机由洗衣系统和控制电路组成。
其控制电路分为机械和电脑型,电脑型控制电路是以单片机作为控制电路的核心。
自动洗衣机的洗衣程序,键盘上有两个按钮01键和02键。
01键设为开始按钮;02键设为停止按钮,其功能是按下停止按钮后洗完一个周期后停止,中间不能停。
洗衣机的标准洗衣程序是;开始--进水--洗涤--排水--进水--清洗--排水--脱水。
1.洗涤过程通电后,洗衣机进入暂停状态,以便放好衣物并且等待按下开始按钮。
当按下开始按钮01时,进入洗涤过程。
首先进水阀打开,开始进水,向洗衣机供水;当到达预定水位时,进水阀关闭,停止进水;步进电动机接通电源,开始旋转,形成洗衣水流。
Atmega8515做的一个16通道伺服舵机控制系统

以前用Atmega8515做的一个16通道伺服舵机控制的东东此程序为16通道伺服舵机控制程序,使用CodeWizardAVR V1.24.1d编译生成,采用AVR单片机ATmage8515L,晶振频率8MHZ,另有如下几点说明:1.主体电路应该有AVRmega8515L单片机,RS232通讯部件、I2C总线插座、16路伺服舵机控制接口、8MHZ晶体、AVR-ISP编程下载接口。
2.PB0口的跳线接至高电平时为伺服舵机的实时调试模式,此时应该打开“16通道舵机控制器”软件,并将单片机的串口和电脑的COM1口相连,然后打开单片机通电运行,拖动滑竿,如果舵机能实时跟踪滑块的动作,说明通讯正常。
拖动其他通道的舵机,取好合适的动作值(指令范围0~250)和动作时间(大于120ms 小于5s)后点“添加”即加入了第一条指令,依次可以加入更多的指令;如果哪一条指令有错误,选中它后重新拖动滑竿后点“修改”即可纠正,点“删除”即可删掉这一条指令;也可以打开OFFOCE组件ACCESS2000进行修改。
添加完毕便可运行按“自动播放”进行演示,演示成功可按生成HEX文件,此HEX文件用作24Cxx的烧入文件。
3.PB0口的跳线接至低电平时伺服舵机的脱机运行模式:前提是在“16通道舵机控制器”软件将各条指令编好后,点“生成文件”(如图3)便可生成压缩数据,然后通过TOP2003编程器把它烧入24CXX系列(这里用的是24C64,8KB的容量) 的E2PROM,将它插入I2C插槽,并将PB0口的跳线接至低电平,接通单片机电源,舵机便可逐条执行刚才做好的指令,指令条数可达2000条。
4.单片机内的程序已经达到控制精度的要求:控制路数-16路,分辨率-0.72°/分度,指令范围0~250,单条指令执行时间-大于120ms小于5s,调速模式-13种,数据压缩率-小于10%注意:由于舵机工作电流较大,使用时应将舵机和单片机分开供电,否则程序容易跑飞。
Atmega8515单片机多机通信硬件电路设计

Atmega8515单片机多机通信硬件电路设计一、RS-485方式构成的多机通信原理用MAX1487构成的多机通信原理框图如图1所示。
总线末端接匹配电阻,吸收总线上的反射信号,保证信号传输无毛刺。
匹配电阻的取值应与总线的电阻特性相当。
当总线上没有信号传输时,总线处于悬浮状态,易受干扰信号影响。
在总线上差分信号的正端A+和+5V电源间接一个10kΩ的电阻,正端A+和负端B-间接一个10kΩ的电阻,负端B-和地间接一个10kΩ的电阻,形成网络。
总线上没有信号传输时,正端A+的电平大约为3.2V,负端B-的电平大约为1.6V。
即使有干扰信号,也很难产生串行通信的起始信号0,从而增加了总线抗干扰的能力。
在半双工通信情况下,发送和接收共用一个物理通道,任意时刻只允许一台单机处于发送状态。
因此,要求应答单机必须在侦听到总线上呼叫信号已经发送完毕,且没有其他单机发出应答信号的情况下才能应答。
如果在时序上配合不好,就会发生总线冲突,使整个系统通信瘫痪,无法正常工作。
要避免这一点,必须遵守以下几项原则:1.复位时,主从机都处在接收状态MAX1487的发送和接收功能转换是由/RE,DE端控制的。
RE=1,DE=1时,MAX1487处于发送状态:/RE=0,DE=0时,处于接收状态。
使用单片机的一根口线连接/RE,DE端。
在上电复位时,硬件电路稳定需要一定时间,且单片机各端口复位后处于高电平状态,会使总线上各个分机处于发送状态,加上上电时各电路不稳定,可能向总线发送信息。
因此,用一根口线作发送和接收控制信号,应该将口线反向后接入MAX1487的控制端,使上电时MAX1487处于接收状态。
2.控制端,RE、DE的信号的有效宽度应大于发送或接收一帧信号的宽度MAX1487的发送和接收都由同一器件完成,且使用同一物理通道,必须对控制信号进行切换。
控制信号何时为高电平、何时为低电平,以单片机的标志位作为参考。
A VR的标志位为TXC和RXC。
基于at8951芯片的电子广告牌电路设计

现在城市中用于装点各种建筑物的绚丽色彩依旧是霓虹灯.但是霓虹灯具有发热量大,亮度较小,色彩较暗,价格较贵且耗电量较大等缺点已经不作为现在装饰的主要选择对象。
点阵屏具有价格便宜,可视度远,亮度高,耗能较低,体积较小,且可以根据实际情况由几块小的点阵屏组合成较大面积的点阵块等优点。
在此主要介绍以AT89S51为控制芯片,用8×8的点阵屏4块来级联实现16×16的点阵屏,从而用于广告牌显示等。
1 系统设计方案鉴于所设计的点阵屏为16×16单色显示,可以用8×8的点阵屏4块来级联实现,此时点阵屏的行列各为16管脚,需要扩展口,采用74LS164串行输入并行输出来实现。
整个系统以AT89S51为控制芯片,P0/P2口为行控制,P3口为芯片74LS164的输入,且2片74LS164级联后为列控制,通过软件程序调用不同的代码来显示字符或文字。
2 元器件介绍2.1 AT89S51单片机简介AT89S51拥有4 KB的可编程的闪存(FLASHProgrammahle AND Erasable Read Only Memory)。
片上的闪存允许在系统内再编程,在系统开发时可以十分容易地进行程序修改,即使程序错误也不会成为废品。
由于在单片机集成电路上包括用8位CPU和闪存,AT89S51成为强大的控制器,它为很多嵌入式系统提供一种高效灵活的解决方案。
基于以上理由,选择了AT89S51。
2.2 74LS164芯片简介在单片机系统中,如果并行口的I/O资源不够,而串行口又没有其他的作用,那么可以用74LS164来扩展并行I/O口,节约单片机资源。
74LS164是一个串行输入/并行输出的移位寄存器,并带有清除端。
3 硬件设计图1电路为1块8×8点阵显示电路连接图。
(1)把“单片机系统”区域中的P1端口用8芯排芯连接到“点阵模块”区域中的“DR1~DR8”端口上;(2)把“单片机系统”区域中的P3端口用8芯排芯连接到“点阵模块”区域中的“DC1~DC8”端口上;如果要显示大的图像可多个点阵拼在一起,将点阵的行和行相串联,列和列相串联,用741S164控制单个行即可。
单片机毕业设计80c51

单片机毕业设计80c51本文的毕业设计主要涉及到80C51单片机的应用。
本篇文章将介绍单片机的基本原理、在数字电子钟的设计中的具体应用、硬件设计和软件编程,并给出程序设计流程与详细实现过程。
一、 80C51单片机的基本原理只要有些基础的理解,学习单片机并不难。
单片机是包含CPU、ROM、RAM和其他外设的一种集成电路(IC)芯片。
单片机因其体积小、功耗低、成本低而在实际应用中广泛使用。
具有代表性的是80C51单片机系列。
80C51单片机有多种不同的型号,每个型号内置指令集在某种程度上都有所不同。
最简单的80C51型号内置的指令集只有40多种指令。
可以想象,由于指令集非常简化、结构紧凑,这样设计出来的芯片具有性能非常稳定的特点。
二、数字电子钟的设计数字电子钟是指采用数字电路或数字电子技术设计的显示时间的钟。
数字电子钟广泛应用于生活中的种种需要,能够比较稳定地显示时间,其他功能还包括定时、闹钟、备忘等选项。
三、数字电子钟的硬件设计数字电子钟的硬件设计涵盖了三个方面:1. 显示电路的设计数字电子钟的显视屏幕通常是7片LED,其中6片是数字显示屏,第7片为冒号显示屏。
这个设计采用COS-8886电路,典型的应用范围是数码电子表、温度计等。
2. 时基方案的设计时基方案是指数字电子钟中的总体控制方案。
这里我们采用的是74HC4060的集成电路。
使用74HC4060,可以非常方便地进行时钟频率的分频设计。
3. 蓝牙通信模块的设计蓝牙通信模块的设计中,我们使用了常见的蓝牙串口传输模块,如HC-06,其工作电压在3.3V ~ 5V之间,具备良好的兼容性。
四、数字电子钟的软件编程数字电子钟的软件编程主要涉及以下两个方面:1. 定时计数器的设计采用80C51单片机设计定时计数器时,需要考虑到时钟频率、计时器精度、转换精度等问题。
借助于8051单片机提供的Timer/Counter模块,可以很方便地实现这个功能。
2. 蓝牙通信程序设计程序设计中需要考虑到串口通信协议,包括蓝牙模块的波特率,校验位和数据位等问题。
基于AT90S8515的串行通信及其应用

中断被执 行 :
位卜 R Ⅺ : 收使 能, 接 当该位被设置时允 许UR A T接收 , 当接 收器被禁止 时 ,X 、 R F T C O 、E位
的状态 标 志不能设 置 , 则 , 把 R E 否 在 X N关 闭 时不 能 消 除它们 ;
AB TRA S CT: h e Il T ep Ⅱ叽唧
串行接 口U R 应用程序 AT
ad F aue fsr l RT b sd o 一P r a n eA R M co n etrso e a UA ae nHi i ef  ̄ae V c ir-
e nml r o t l AT 0 8 1 i n rd c d a d s g a p iai rg a n sr l d t c a e f r i o i e 9 S 5 5 sit u e n e l p l t p o rms o e a aa cr mia o a e gv o  ̄ c o n i  ̄ i n n n d p pr 血 a e.
维普资讯
自动化与 仪器仪 表
ZI ) GKI IY Q Y BA I N I AYJ I I II O X
文章编号 : 0 — 2720 ) 一 o o 1 1 92 (020 ∞2 — 4 0 3
2O 年第 3 总第 11 O2 期( 0 期)
基 于 A 9 S 5 5的 串行 通 信 及 其 应 用 T0 8 1
李 军 刘君华 董海 鹰 ( 西安交通大学电气工程学院 西安,1 4) 70 9 0
摘 要 : 了高性能 A R微控制器 A 9S55 介绍 V T08 1 的串行通信接 口U R 的主要性能特点 , AT 并给 出串行数据通信的程序 。 关键词:T0 81 微控制器 A 9S55
广州市天河双龙电子 用ATMEGA8515替换AT90S8515 说明书

清零发生在第一次比较匹配
h 表示该输出比较标志/引脚将被置1 注释: 1 配后 TCNTn=OCR1x=2
清零发生在最后一次比较匹
预分频 输出比较时的设置引脚电平/标志 定时/计数器1 设置引脚电平/标志和定时器/计数器1内部计数之间的关系改变了 AT90S8515 的输出比较在内部计数与比较值第一次匹配时执行 而ATMEGA8515的输出比较在内 部计数与比较值最后一次匹配时执行 图3和图4是图例说明 示例: OCR1x = 0x02 (预分频器使能 8 分频) 图 3. 设置输出比较标志/Pin for AT90S8515
注释: 1.
h
表示该输出比较标志/引脚将被置1
图 4. 设置输出比较标志/Pin for ATmega8515
注释: 1.
h
表示该输出比较标志/引脚将被置1
PWM模式下写OCR1x 切换到正常模式 OCR1x在最大值处被更新 读 OCR1x 按照数据手册中描述 写入到OCR1x的值在寄存器到达最大值时被更新 所以 在PWM模式下写OCR1x时 数值先存储在临时缓冲中 当定时器/计数器计数到最大 值时才由临时缓冲传输到真正的输出比较寄存器 如果临时缓冲被写后仍处于 PWM 模式下 在真正的输出比较寄存器更新前读OCR1x ATMEGA8515和AT90S8515是不同 的 ATMEGA8515 如果OCR1x寄存器在更新前被读取 读取的是OCR1x的实际值而不是临时缓冲 AT90S8515 如果OCR1x寄存器在更新前被读取 读取的是临时缓冲而不是OCR1x的实际值
三
修正了原来AT90S8515中的一些错误
AT90S8515 勘误表中的下列各项不适用于 ATMEGA8515 请参考AT90S8515 勘 误表以获取更详细的说明 注意 其中一些错误在最后一批 AT90S8515中得到更正 但这些仍要指出来 以便使基于 AT90S8515 的设计转换时更容易 读写外部 RAM 时 LDS/STS LDS 和 STS 不会破坏 ATMEGA8515 中的任何寄存器的内容 读写 EEPROM 时 STS STS 可以在 ATMEGA8515 中启动 EEPROM 写操作(EECR 中的 EEWE) 无任何不良影响
ATmega8515中断定时器的原理和应用
▪
WGM1=14时,最大值由ICR1设定, TOP时产生ICF1输入捕捉中断 (单
缓冲)
▪
WGM1=15时,最大值由OCR1A设定,TOP时产生OCF1A比较匹配中
断(双缓冲,但OC1A将没有PWM能力,最多只能输出方波)
▪
改变TOP值时必须保证新的TOP值不小于所有比较寄存器的数值
▪
注意,即使OCR1A/B设为0x0000,也会输出一个定时器时钟周期的窄
Page 2
AVR单片机的中断系统结构
主程序
中断响应
中断继续执行 主程序
执行 中断 处理 程序
中断返回
Page 3
主程序A
断点
响应 中断服务程序B
返回
……
RETI
引起CPU中断的根源,称为中断源。中断源向 CPU提出的中断请求。CPU暂时中断原来的事务A, 转去处理事件B。对事件B处理完毕后,再回到原来 被中断的地方(即断点),称为中断返回。实现上述 中断功能的部件称为中断系统(中断机构)。
脉冲,而不是一直为低电平
▪
计算公式:fPWM=fclk_IO/(N*(1+TOP))
Page 22
相位修正PWM
Page 23
用到的寄存器: 1、T/C1控制寄存器A
Page 24
2、T/C1控制寄存器B
Page 25
Page 26
3、输出比较寄存器1A-OCR1A 4、输出比较寄存器1B-OCR1B
Page 4
Page 5
I/O端口的第二功能
Page 6
定时/计数器1(16位)
▪ 普通模式 ▪ CTC模式 ▪ 快速PWM模式 ▪ 相位修正PWM模式 ▪ 相位频率修正PWM模式 ▪ 输入捕获模式
ATMEGA8515L单片机相关特点介绍与IC解密

ATMEGA8515L单⽚机相关特点介绍与IC解密 芯⾕科技芯⽚解密中⼼所有解密型号均经过多次实验验证和分析,在可靠的前提下才对客户母⽚进⾏实际解密,可最⼤限度确保客户母⽚的安全性及IC解密的有效性、可靠性。
有ATMEGA8515L单⽚机解密需求者请与芯⾕科技联系。
ATMEGA8515L 特性: ⾼性能、低功耗AVR ?8 位微控制器; RISC结构:130 条强⼤指令,⼤多数指令执⾏时间为单个时钟周期; 130×8 位通⽤⼯作寄存器; 全静态⼯作,⼯作于16MHz 时性能⾼达16MIPS; ⽚上2 周期乘法器; ⾮易失性程序和数据存储器; 8KB 系统内⾃编程Flash (寿命:10000 次写⼊/擦除周期); 可选的具有独⽴锁定位的启动代码段; 在系统内编程由芯⽚启动程序; 真正的读写操作; 512 字节EEPROM(寿命:100000写⼊/擦除周期); 512 字节⽚内SRAM; 多达64KB可选外部存储器空间; 对锁定位进⾏软件加密,外设特点:1个带有独⽴分频器⽐较模式的8 位定时器/计数器; 1个带有独⽴分频器、⽐较模式和捕捉模式的16位定时器/ 计数器; 3个PWM 通道; 可编程串⾏USART; 主/从SPI 串⾏接⼝; 具有独⽴⽚内振荡器的可编程看门狗定时器; ⽚上模拟⽐较器; 特殊的处理器特点:电源复位和可编程掉电检测; 内部标定RC振荡器; ⽚外/⽚内中断源; 3 种睡眠模式:空闲、掉电和待机模式; I/O和封装:35个可编程I/O⼝; 44引脚TQFP和44引脚PLCC封装; ⼯作电压:2.7 ~5.5V; 速度等级:0 ~8MHz。
AVR单片机AT90S8515及其应用

AVR单片机AT90S8515及其应用On AVR SCU2AT9OS8515and its Application张艳丽1,张绍楠2,高世伟3(1.佳木斯大学,黑龙江 佳木斯 154007; 2.鹤岗发电有限责任公司,黑龙江 鹤岗 154109;3.天津电力公司,天津 300020)摘要:结合一种基于G PS的输电线路巡检系统的设计讨论了AT90S8515的应用。
简要介绍了AT90S8515的主要特性以及系统的实现,着重给出了巡检机的硬件及其软件流程。
关键词:AT90S8515;G PS(全球定位系统);巡检机[中图分类号]TP368.1[文献标识码]B[文章编号]1004-7913(2005)03-0023-03 AVR(Advanced RISC)单片机是AT ME L公司继AT89系列之后推出的全新配置的精简指令集RISC的高性能8位单片机。
设计上采用低功耗的C M OS技术,而且在软件上支持C高级语言及汇编语言。
其中,AT90S8515是该系列中比较有代表性的一种,文中对其在基于G PS的输电线路巡检系统中的应用进行详实地说明。
1 AT90S8515简介AT90S8515硬件应用Harward结构,具有预取指令功能,使得指令可以在一个时钟周期内执行;具有120条功能强大的指令,大多数执行为单周期,每MH z可实现I MIPS的处理能力,芯片外封装(PDIP)如图1所示。
其主要特点如下。
a.8K字节可下载的flash程序存储器。
b.512字节在线可编程E2PROM(可擦写10万次)和512字节的SRAM。
c.32个通用I/O口线的64个I/O专用寄存器。
d.32个通用寄存器,可直接与算术逻辑单元(A LU)相连,克服了单一累加器在数据处理的瓶颈现象。
e.一个8位定时器/计数器T/C O,一个16位带预分频及比较模式、捕获模式及双工8位、9位或10位的PW M输出的定时器/计数器T/C1。
基于AT90S8515单片机的蛇形机器人控制系统设计[1]
![基于AT90S8515单片机的蛇形机器人控制系统设计[1]](https://img.taocdn.com/s3/m/d5e5b92a3169a4517723a3b9.png)
基于AT90S8515单片机的蛇形机器人控制系统设计吴 坚1,胡继康2,陆 伟1(1.苏州工业园区职业技术学院机电系,江苏省苏州市215021;2.苏州大学机电工程学院自动化系,江苏省苏州市215021)【摘 要】 介绍了一种基于AT90S8515单片机控制的蛇形机器人的结构原理和软硬件实现方法,该机器人采用遥控方式操作,能够良好地模拟蛇的直线运动,并能以设定的速度完成预先编排的抬头、摆尾等动作。
由于采用了R I SC 结构的控制器,该机器人运动控制算法简单实用,成本较低,具有广阔的应用前景。
关键词:AT90S8515单片机,蛇形机器人,控制系统中图分类号:TP242.6收稿日期:20052032030 引 言蛇形机器人是近年来兴起的仿生机器人的一个新的分支。
它区别于传统的利用轮、腿或履带移动的机器人,模仿蛇的动作,通过“身体”的扭动和伸缩实现“无肢运动”。
这种运动方式的机器人具备稳定性好、横截面小、高柔性等特点。
这些特点使得蛇形机器人适合在一些特殊环境下代替人进行作业(例如:核电站、石油化工等领域的内部部件检测及维护;对管道的泄露进行检查以及修补等),不仅使人更安全,也使探测、救援或维护更有效。
随着人们对蛇形机器人的认识,美国、日本、德国等都开展了蛇形机器人研究,并研制出许多样机,如美国米勒的S 系列蛇形机器人等。
近年来,国内也开展了对蛇形机器人的研究工作。
我们可以把蛇的爬行分为以下4种方式:a )蜿蜒运动。
蛇体摆动近似于正弦波的规律,借助侧面接触凸凹不平的地面所产生的反作用力前进。
b )直线运动。
蛇体靠腹部和地面的摩擦力移动,当腹部与地面固定时提供牵引力,连接肋骨和弹性皮肤的肌肉提供推动力,皮肤相对骨骼移动,反复实现运动。
c )侧向运动。
借助腹部和地面的摩擦力移动,蛇体从头部开始,身体部分顺次接地、抬起,借助腹部与地面之间的摩擦力完成侧向运动。
d )伸缩运动。
身体先收缩成S 形,然后后部贴紧地面,前部向前伸出,接着前部再贴紧地面,后部收缩向前,如此循环完成向前移动。
基于ATmega8515的低热电势程控扫描开关
基于ATmega8515的低热电势程控扫描开关
胡永建
【期刊名称】《微型机与应用》
【年(卷),期】2011(030)007
【摘要】介绍了一种低热电势程控扫描开关的设计.单片机ATmega8515通过步进电机控制12路波段开关的转动,实现标准热电偶的测量通道切换功能.该扫描开关可手动操作,也可程控操作,已成功应用于全自动温度校准系统.测试结果表明,该扫描开关极大降低了测量通道的热电势,在计量检定领域具有良好的应用前景.
【总页数】4页(P16-18,21)
【作者】胡永建
【作者单位】西部钻探吐哈钻井工艺研究院,新疆鄯善838202
【正文语种】中文
【中图分类】TB942
【相关文献】
1.低热电势扫描开关通道电势测试综合性实验开发 [J], 富雅琼;李正坤;谢敏;许素安;陈乐
2.热工低热电势转换开关的设计与应用 [J], 裴锐
3.多路低热电势程控开关的研制 [J], 王磊;刘瑞珉
4.通用继电器取代低热电势切换开关的可行性 [J], 杨平;徐兆龙;何毅;邢博华
5.基于OneNET的多模式远程控制开关系统设计 [J], 闫施锦;陈淼;刘静波
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
交流平台
实战案例CASE ANALYSIS
编辑︱孙雁︱E-mail:zhiyezazhi@
OCCUPATION
157
2009 9
处理淬硬。
通过在老师的演示操作及学生的实际操作中渗透极限配合与技术测量基础,使广大学生体会到该课程的重要性。
三、实习课后的工件考核点评
工件考核点评是执行考核常规、全面实现考核功能的不可忽视的环节。
然而,人们往往重考核而轻讲评。
这就大大降低了考核的效果,那么如何组织考核点评呢?
1. 突出针对性
教师要准确分析学生在知识和思维方面的薄弱环节,找出实际操作中出现的具有共性的典型问题,针对导致误差的根本原因及解决问题的方法进行评讲。
这样有的放矢,节约时间,又使学生对自己的考核分数知其然而知其所以然。
2. 强调层次性
工件点评是全体师生的双边活动,但不同学生存在的问题不尽相同,因而要调动各层次学生都积极参与讲评活动,使每一位学生都有所收获。
这就要求教师从整体上把握点评内容的层次性,使内容层次与学生层次相吻合。
3. 注意新颖性
点评课涉及的内容都是学生已学过的极限配合与技术
测量知识,但点评内容绝不应是原有形式的简单重复,必须有所变化和创新。
在设计点评方案时,应注意在原有知识中渗入新的内容,如什么条件会产生误收、什么条件会产生误废及产生误收、误废的原因有哪些等。
对同一知识点应多层次、多方位解剖分析,同时注意对所学知识进行归纳总结、提炼升华,以崭新的面貌展示给学生,让学生感到内容新颖,学有所得。
通过点评,训练学生由正向思维向逆向思维、发散思维过渡,提高分析、综合和灵活运用能力。
4. 讲究激励性
工件点评时,切不可忽视各类学生的心理状态,要用好激励手段。
对各种优点的表扬要因人而异,让受表扬者既有动力又有压力,对存在的问题提出善意批评的同时,应包含殷切的期望,使学生能面对现实,找到自己努力的目标,振作精神,积极地投入到下一工件操作中去。
众所周知,工艺是钳工成败的关键,而读懂图中尺寸又是安排工艺合理的必要基础,这就是理论联系实践,理论指导实践的原理。
所以,极限配合与技术测量对钳工教学相当重要,在钳工实习指导中处处渗透着极限配合与技术测量的教学是很有必要的。
(作者单位:广东省工商技工学校)
Atmega8515
单片机多机通信硬件电路设计
文/蒋金元
一、RS-485方式构成的多机通信原理
用MAX1487构成的多机通信原理框图如图1所示。
图1 多机通信原理图
实战案例
编辑︱孙雁︱E-mail:zhiyezazhi@ 交流平台CASE ANALYSIS
OCCUPATION 2009 9图2 Atmega8515与MAX1487接线图
总线末端接匹配电阻,吸收总线上的反射信号,保证信号传输无毛刺。
匹配电阻的取值应与总线的电阻特性相当。
当总线上没有信号传输时,总线处于悬浮状态,易受干扰信号影响。
在总线上差分信号的正端A+和+5V电源间接一个10kΩ的电阻,正端A+和负端B-间接一个10kΩ的电阻,负端B-和地间接一个10kΩ的电阻,形成网络。
总线上没有信号传输时,正端A+的电平大约为3.2V,负端B-的电平大约为1.6V。
即使有干扰信号,也很难产生串行通信的起始信号0,从而增加了总线抗干扰的能力。
在半双工通信情况下,发送和接收共用一个物理通道,任意时刻只允许一台单机处于发送状态。
因此,要求应答单机必须在侦听到总线上呼叫信号已经发送完毕,且没有其他单机发出应答信号的情况下才能应答。
如果在时序上配合不好,就会发生总线冲突,使整个系统通信瘫痪,无法正常工作。
要避免这一点,必须遵守以下几项原则:
1.复位时,主从机都处在接收状态
MAX1487的发送和接收功能转换是由/RE,DE端控制的。
/RE=1,DE=1时,MAX1487处于发送状态;/RE=0,DE=0时,处于接收状态。
使用单片机的一根口线连接/ RE,DE端。
在上电复位时,硬件电路稳定需要一定时间,且单片机各端口复位后处于高电平状态,会使总线上各个分机处于发送状态,加上上电时各电路不稳定,可能向总线发送信息。
因此,用一根口线作发送和接收控制信号,应该将口线反向后接入M A X1487的控制端,使上电时MAX1487处于接收状态。
2.控制端/RE、DE的信号的有效宽度应大于发送或接收一帧信号的宽度
MAX1487的发送和接收都由同一器件完成,且使用同一物理通道,必须对控制信号进行切换。
控制信号何时为高电平、何时为低电平,以单片机的标志位作为参考。
AVR的标志位为TXC和RXC。
二、Atmega8515和MAX1487的连接
在多机通信过程中,所有设备的RS-485接口是并在通信线上的,只能有一个设备为主机,其他为从机。
通信由
主机发起。
数据帧一般采用1位起始位、9位数据位,其中第9位(RXB8)被用作表征该帧是地址帧还是数据帧。
当帧类型表征位为“1”时,表示该帧数据为一个地址帧;当帧类型表征位为“0”时,表示这个帧为一个数据帧。
主机M C U可以设置使用9位数据帧结构(U C S Z=7)。
当发送地址帧时,置第9位为“1”;发送数据帧时,置第9位为“0”。
这种情况下,从机必须设置成接收9位数据帧结构。
多机通信模式允许多个从机并在通信线路上,接收一个主机发出的数据。
通过对接收到的地址帧中的地址进行解码,确定哪个从机被主机寻址。
如果某个从机被主机寻址,它将接收接下来主机发出的数据帧,而其它的从机将忽略数据帧,直到再次接收到一个地址帧(从机地址是由各个从机本身的软件决定的)。
(作者单位:江苏省南京技师学院)。