追赶法在求解循环和拟循环三对角方程组中的一种推广
MATLAB 追赶法求解三对角方程组的算法原理例题与程序

3)三对角形线性方程组123456789104100000000141000000001410000000014100000000141000000001410000000014100000000141000000001410000000014x x x x x x x x x x -⎡⎤⎡⎤⎢⎥⎢⎥--⎢⎥⎢⎥⎢⎥⎢⎥--⎢⎥⎢⎥--⎢⎥⎢⎥⎢⎥⎢⎥--⎢⎥⎢⎥--⎢⎥⎢⎥⎢⎥⎢⎥--⎢⎥⎢⎥--⎢⎥⎢⎥⎢⎢⎥--⎢⎢⎥⎢⎢⎥-⎣⎦⎣⎦7513261214455⎡⎤⎢⎥⎢⎥⎢⎥-⎢⎥⎢⎥⎢⎥=⎢⎥-⎢⎥⎢⎥⎢⎥-⎢⎥⎥⎢⎥⎥⎢⎥⎥⎢⎥-⎣⎦*(2,1,3,0,1,2,3,0,1,1)T x =--- 二、数学原理设系数矩阵为三对角矩阵1122233111000000000000000n n n nn b c a b c a b A a b c a b ---⎛⎫ ⎪ ⎪ ⎪=⎪ ⎪ ⎪⎪ ⎪⎝⎭则方程组Ax=f 称为三对角方程组。
设矩阵A 非奇异,A 有Crout 分解A=LU ,其中L 为下三角矩阵,U 为单位上三角矩阵,记1122233110000100000001000000100,00000000000001n n nn b L U γαβγββγβ--⎛⎫⎛⎫ ⎪⎪ ⎪ ⎪ ⎪ ⎪∂==⎪⎪ ⎪⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪∂⎝⎭⎝⎭可先依次求出L ,U 中的元素后,令Ux=y ,先求解下三角方程组Ly=f 得出y ,再求解上三角方程组Ux=y 。
事实上,求解三对角方程组的2追赶法将矩阵三角分解的计算与求解两个三角方程组的计算放在一起,使算法更为紧凑。
其计算公式为:1111,1111,111,2,3,,,1,2,,1ii i i i i i i ii i i i i n ni i i i c f b y i n c a b a f y y x y i n n x y x βγββαβγγβαβγ--+⎧===⎪⎪=⎪⎪⎪==-=⎪⎪⎨-⎪=⎪⎪=⎪⎪=--⎪=-⎪⎩对对(*)三、程序设计function x=chase(a,b,c,f)%求解线性方程组Ax=f,其中A 是三对角阵 %a 是矩阵A 的下对角线元素a(1)=0 %b 是矩阵A 的对角线元素%c 是矩阵A 的上对角线元素c(n)=0 %f 是方程组的右端向量 n=length(f);x=zeros(1,n);y=zeros(1,n); d=zeros(1,n);u= zeros(1,n); %预处理 d(1)=b(1); for i=1:n-1 u(i)=c(i)/d(i);d(i+1)=b(i+1)-a(i+1)*u(i); end%追的过程y(1)=f(1)/d(1); for i=2:ny(i)=(f(i)-a(i)*y(i-1))/d(i); end%赶的过程 x(n)=y(n); for i=n-1:-1:1x(i)=y(i)-u(i)*x(i+1); end>> a=[0,-1,-1,-1,-1,-1,-1,-1,-1,-1];>> b=[4,4,4,4,4,4,4,4,4,4];>> c=[-1,-1,-1,-1,-1,-1,-1,-1,-1,0];>> f=[7,5,-13,2,6,-12,14,-4,5,-5];>> x=chase(a,b,c,f)x =2.00001.0000-3.00000.00001.0000-2.00003.0000-0.00001.0000-1.0000四、结果分析和讨论追赶法求解的结果为x=(2,1,-3,0,1,-2,3,0,1,-1)T。
matlab追赶法求解方程组
matlab追赶法求解方程组方程组是数学中常见的问题之一,解决方程组可以帮助我们理解和解决实际问题。
在数值计算中,matlab是一种常用的工具,它提供了许多求解方程组的方法。
其中,追赶法是一种常用的方法之一,它可以高效地求解三对角线方程组。
三对角线方程组是指方程组中只有主对角线和两个相邻的次对角线上有非零元素,其余元素均为零。
这种方程组在实际问题中经常出现,例如求解热传导方程、电路分析等。
追赶法是一种特殊的高斯消元法,它通过对方程组进行变换,将其转化为一个上三角形方程组和一个下三角形方程组,从而简化求解过程。
追赶法的基本思想是通过迭代的方式,逐步消去次对角线上的元素,最终得到方程组的解。
具体步骤如下:1. 将原方程组表示为矩阵形式,设为A*X=B,其中A是一个n×n的矩阵,X和B是n维列向量。
2. 对A进行LU分解,得到一个上三角矩阵U和一个下三角矩阵L,使得A=L*U。
3. 将方程组A*X=B转化为L*U*X=B。
4. 令Y=U*X,将方程组转化为L*Y=B。
5. 通过迭代的方式,逐步求解Y和X。
首先求解L*Y=B,然后求解U*X=Y。
6. 求解L*Y=B时,从第一行开始,逐行求解Y的每个分量。
设第i 行的元素为y(i),则有y(i)=B(i)-L(i,i-1)*y(i-1),其中L(i,i-1)是L矩阵中第i行第i-1列的元素。
7. 求解U*X=Y时,从最后一行开始,逐行求解X的每个分量。
设第i行的元素为x(i),则有x(i)=(Y(i)-U(i,i+1)*x(i+1))/U(i,i),其中U(i,i+1)是U矩阵中第i行第i+1列的元素。
通过以上步骤,我们可以得到方程组的解X。
追赶法是一种高效的求解三对角线方程组的方法,它的时间复杂度为O(n),其中n是方程组的维数。
相比于其他求解方法,追赶法具有计算量小、速度快的优势。
在matlab中,我们可以使用tridiag函数来实现追赶法求解方程组。
(完整版)2.6追赶法
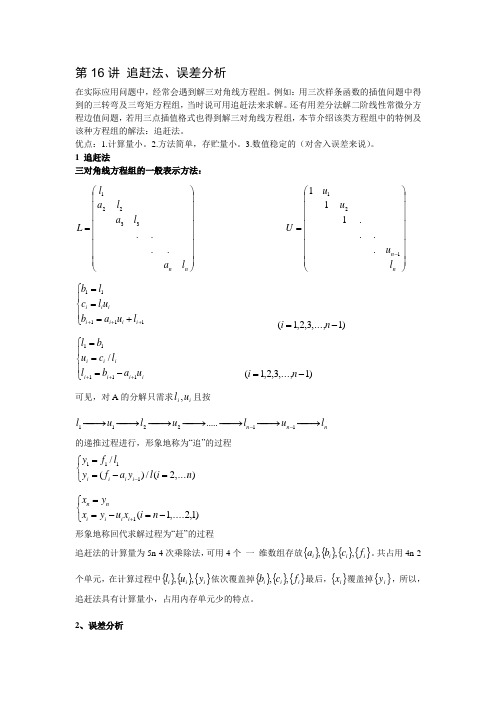
第16讲 追赶法、误差分析在实际应用问题中,经常会遇到解三对角线方程组。
例如:用三次样条函数的插值问题中得到的三转弯及三弯矩方程组,当时说可用追赶法来求解。
还有用差分法解二阶线性常微分方程边值问题,若用三点插值格式也得到解三对角线方程组,本节介绍该类方程组中的特例及该种方程组的解法:追赶法。
优点:1.计算量小。
2.方法简单,存贮量小。
3.数值稳定的(对舍入误差来说)。
1 追赶法三对角线方程组的一般表示方法:可见,对A 的分解只需求i i u l ,且按n n n l u l u l u l −→−−→−−→−−→−−→−−→−−→−--112211.....的递推过程进行,形象地称为“追”的过程⎩⎨⎧=-==-),....2(/)(/1111n i l y a f y l f y i i i i⎩⎨⎧-=-==+)1,2,.....1(1n i x u y x y x i i i inn 形象地称回代求解过程为“赶”的过程追赶法的计算量为5n-4次乘除法,可用4个 一 维数组存放{}{}{}{}i i i i f c b a ,,,。
共占用4n-2个单元,在计算过程中{}{}{}i i i y u l ,,依次覆盖掉{}{}{}i i i f c b ,,最后,{}i x 覆盖掉{}i y ,所以,追赶法具有计算量小,占用内存单元少的特点。
2、误差分析⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫⎝⎛=-n n l u u u U 121....111⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫⎝⎛=n nl a l a l a l L ....33221)1,...,3,2,1(-=n i ⎪⎩⎪⎨⎧+===+++11111i i i i ii i lu a b u l c l b ⎪⎩⎪⎨⎧-===+++ii i i ii i u a b l l c u b l 11111/)1,...,3,2,1(-=n i病态方程组与条件数一个线性方程组Ax=b 是由它的系数矩阵A 和它的右端项b 所确定,在实际问题中,由于各种原因,A 或b 往往有误差,从而使得解也产生误差。
matlab追赶法解101阶三对角方程组
在探讨MATLAB追赶法解101阶三对角方程组之前,我们首先需要了解什么是追赶法和什么是三对角方程组。
追赶法又称托马斯算法,是一种用于求解带状矩阵(即只有主对角线和两条相邻的对角线上有非零元素的矩阵)的线性方程组的方法。
而三对角矩阵就是只有主对角线和两条相邻的对角线上有非零元素的矩阵。
在实际应用中,求解带状矩阵的线性方程组是非常常见的,特别是在数值计算和科学工程领域。
现在,让我们深入探讨MATLAB追赶法解101阶三对角方程组的方法和具体步骤。
一、MATLAB追赶法解101阶三对角方程组1. 概念介绍101阶三对角方程组是一个非常大的线性方程组,通常使用传统的高斯消元法来求解会耗费大量的时间和计算资源。
而MATLAB追赶法通过利用三对角矩阵的特殊性质,可以有效地简化计算过程,并且节省大量的内存和计算资源。
2. 追赶法步骤(1)将原方程组化为追赶法所需的形式;(2)利用追赶法求解三对角线性方程组。
二、追赶法求解101阶三对角方程组的实现过程1. 将原方程组化为追赶法所需的形式对于101阶三对角方程组,我们首先需要将其化为追赶法所需的形式。
这个过程涉及到选取合适的追赶元和追赶子以及对原方程组的变形,将其化为追赶法能够直接处理的形式。
2. 利用追赶法求解线性方程组一旦将原方程组化为追赶法所需的形式,我们就可以利用追赶法对其进行求解。
追赶法的核心是通过追赶子的迭代计算,逐步求得线性方程组的解。
在MATLAB中,可以使用内置的追赶法求解函数,也可以编写自定义的追赶法算法来实现对101阶三对角方程组的求解。
三、个人观点和理解在实际工程和科学计算中,追赶法是一种非常有效的求解带状矩阵线性方程组的方法。
对于大规模的三对角方程组,特别是高阶的情况,传统的直接求解方法往往会遇到内存和计算资源的限制,而追赶法能够通过精巧的迭代计算,在保证解的精度的显著提高计算效率。
在MATLAB中,通过调用内置的追赶法函数,可以快速地求解大规模的三对角方程组,极大地方便了工程实践中的数值计算工作。
【良心出品】MATLAB 追赶法求解三对角方程组的算法原理例题与程序
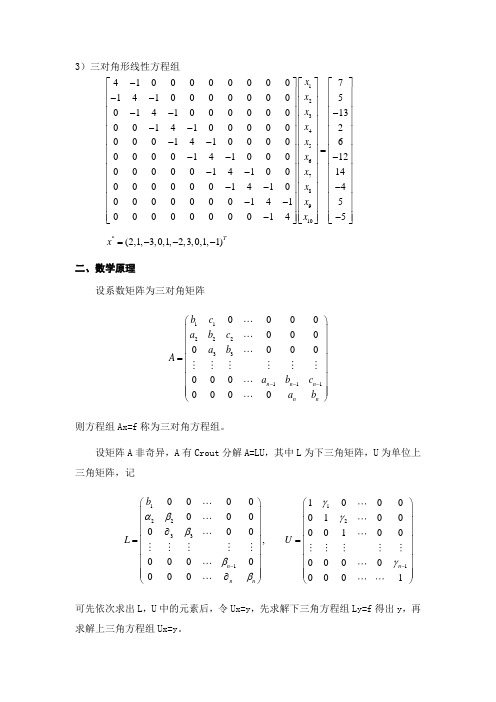
3)三对角形线性方程组123456789104100000000141000000001410000000014100000000141000000001410000000014100000000141000000001410000000014x x x x x x x x x x -⎡⎤⎡⎤⎢⎥⎢⎥--⎢⎥⎢⎥⎢⎥⎢⎥--⎢⎥⎢⎥--⎢⎥⎢⎥⎢⎥⎢⎥--⎢⎥⎢⎥--⎢⎥⎢⎥⎢⎥⎢⎥--⎢⎥⎢⎥--⎢⎥⎢⎥⎢⎢⎥--⎢⎢⎥⎢⎢⎥-⎣⎦⎣⎦7513261214455⎡⎤⎢⎥⎢⎥⎢⎥-⎢⎥⎢⎥⎢⎥=⎢⎥-⎢⎥⎢⎥⎢⎥-⎢⎥⎥⎢⎥⎥⎢⎥⎥⎢⎥-⎣⎦*(2,1,3,0,1,2,3,0,1,1)T x =--- 二、数学原理设系数矩阵为三对角矩阵1122233111000000000000000n n n nn b c a b c a b A a b c a b ---⎛⎫ ⎪ ⎪ ⎪=⎪ ⎪ ⎪⎪ ⎪⎝⎭则方程组Ax=f 称为三对角方程组。
设矩阵A 非奇异,A 有Crout 分解A=LU ,其中L 为下三角矩阵,U 为单位上三角矩阵,记1122233110000100000001000000100,00000000000001n n nn b L U γαβγββγβ--⎛⎫⎛⎫ ⎪⎪ ⎪ ⎪ ⎪ ⎪∂==⎪⎪ ⎪⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪∂⎝⎭⎝⎭可先依次求出L ,U 中的元素后,令Ux=y ,先求解下三角方程组Ly=f 得出y ,再求解上三角方程组Ux=y 。
事实上,求解三对角方程组的2追赶法将矩阵三角分解的计算与求解两个三角方程组的计算放在一起,使算法更为紧凑。
其计算公式为:1111,1111,111,2,3,,,1,2,,1ii i i i i i i ii i i i i n ni i i i c f b y i n c a b a f y y x y i n n x y x βγββαβγγβαβγ--+⎧===⎪⎪=⎪⎪⎪==-=⎪⎪⎨-⎪=⎪⎪=⎪⎪=--⎪=-⎪⎩对对(*)三、程序设计function x=chase(a,b,c,f)%求解线性方程组Ax=f,其中A 是三对角阵 %a 是矩阵A 的下对角线元素a(1)=0 %b 是矩阵A 的对角线元素%c 是矩阵A 的上对角线元素c(n)=0 %f 是方程组的右端向量 n=length(f);x=zeros(1,n);y=zeros(1,n); d=zeros(1,n);u= zeros(1,n); %预处理 d(1)=b(1); for i=1:n-1 u(i)=c(i)/d(i);d(i+1)=b(i+1)-a(i+1)*u(i); end%追的过程y(1)=f(1)/d(1); for i=2:ny(i)=(f(i)-a(i)*y(i-1))/d(i); end%赶的过程 x(n)=y(n); for i=n-1:-1:1x(i)=y(i)-u(i)*x(i+1); end>> a=[0,-1,-1,-1,-1,-1,-1,-1,-1,-1];>> b=[4,4,4,4,4,4,4,4,4,4];>> c=[-1,-1,-1,-1,-1,-1,-1,-1,-1,0];>> f=[7,5,-13,2,6,-12,14,-4,5,-5];>> x=chase(a,b,c,f)x =2.00001.0000-3.00000.00001.0000-2.00003.0000-0.00001.0000-1.0000四、结果分析和讨论追赶法求解的结果为x=(2,1,-3,0,1,-2,3,0,1,-1)T。
数值分析上机实践报告
数值分析上机实践报告一、实验目的本次实验主要目的是通过上机操作,加深对数值分析算法的理解,并熟悉使用Matlab进行数值计算的基本方法。
在具体实验中,我们将实现三种常见的数值分析算法:二分法、牛顿法和追赶法,分别应用于解决非线性方程、方程组和线性方程组的求解问题。
二、实验原理与方法1.二分法二分法是一种常见的求解非线性方程的数值方法。
根据函数在给定区间端点处的函数值的符号,不断缩小区间的长度,直到满足精度要求。
2.牛顿法牛顿法是求解方程的一种迭代方法,通过构造方程的泰勒展开式进行近似求解。
根据泰勒展式可以得到迭代公式,利用迭代公式不断逼近方程的解。
3.追赶法追赶法是用于求解三对角线性方程组的一种直接求解方法。
通过构造追赶矩阵,采用较为简便的向前追赶和向后追赶的方法进行计算。
本次实验中,我们选择了一组非线性方程、方程组和线性方程组进行求解。
具体的实验步骤如下:1.调用二分法函数,通过输入给定区间的上下界、截止误差和最大迭代次数,得到非线性方程的数值解。
2.调用牛顿法函数,通过输入初始迭代点、截止误差和最大迭代次数,得到方程组的数值解。
3.调用追赶法函数,通过输入追赶矩阵的三个向量与结果向量,得到线性方程组的数值解。
三、实验结果与分析在进行实验过程中,我们分别给定了不同的参数,通过调用相应的函数得到了实验结果。
下面是实验结果的汇总及分析。
1.非线性方程的数值解我们通过使用二分法对非线性方程进行求解,给定了区间的上下界、截止误差和最大迭代次数。
实验结果显示,根据给定的输入,我们得到了方程的数值解。
通过与解析解进行比较,可以发现二分法得到的数值解与解析解的误差在可接受范围内,说明二分法是有效的。
2.方程组的数值解我们通过使用牛顿法对方程组进行求解,给定了初始迭代点、截止误差和最大迭代次数。
实验结果显示,根据给定的输入,我们得到了方程组的数值解。
与解析解进行比较,同样可以发现牛顿法得到的数值解与解析解的误差在可接受范围内,说明牛顿法是有效的。
追赶法求解三对角线性方程组

追赶法求解三对角线性方程组一 实验目的利用编程方法实现追赶法求解三对角线性方程组。
二 实验内容1、 学习和理解追赶法求解三对角线性方程组的原理及方法;2、 利用MA TLAB 编程实现追赶法;3、 举例进行求解,并对结果进行分。
三 实验原理设n 元线性方程组Ax=d 的系数矩阵A 为非奇异的三对角矩阵11222=(1)(n 1)()()a c b a c A a n c b n a n ⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥--⎢⎥⎢⎥⎣⎦………… 这种方程组称为三对角线性方程组。
显然,A 是上下半宽带都是1的带状矩阵。
设A 的前n-1个顺序主子式都不为零,根据定理2.5的推论,A 有唯一的Crout 分解,并且是保留带宽的。
其中L 是下三角矩阵,U 是单位上三角矩阵。
利用矩阵相乘法,可以1112212(1)1u(n 1)()()1l u m l u A LU l n m n l n ⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥==⨯⎢⎥⎢⎥--⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦……………得到:由上列各式可以得到L 和U 。
引入中间量y ,令yUx =,则有:已知L 和d ,可求得y 。
则可得到y 的求解表达式:11/12,3,,()(1)*y()=()[()(1)]/y d l i nm i y i li i di y i di m i y i li==-+=--…1111111/1(2)(1)(1)u (1)(11)/(1)(1)(1)l a l u c u c l mi bi i n a i m i i l i i n ci li ui ui ci li l i a i b i ui=*===≤≤+=+++≤≤-=∙=+=+-+Ax LUx Ly d Ly d ====1112222(1)(n 1)(n 1)()()(n)(n)l y d m l y d l n y d m n l n y d ⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⨯=⎢⎥⎢⎥⎢⎥---⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦……………由y Ux =得:111112221u(n 1)(n 1)(n 1)1(n)(n)u x y u x y x y x y ⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⨯=⎢⎥⎢⎥⎢⎥---⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦………… 可得到X 的求解表达式:()()1,2,,1()()u()(1)x n y n i n n x i y i i x i ==--=-+… 从而得到Ax=d 的解x 。
数值分析作业思考题
数值分析思考题11、讨论绝对误差(限)、相对误差(限)与有效数字之间的关系。
2、相对误差在什么情况下可以用下式代替?3、查阅何谓问题的“病态性”,并区分与“数值稳定性”的不同点。
4、取,计算,下列方法中哪种最好?为什么?(1)(33-,(2)(27-,(3)()313+,(4)()611,(5)99-数值实验数值实验综述:线性代数方程组的解法是一切科学计算的基础与核心问题。
求解方法大致可分为直接法和迭代法两大类。
直接法——指在没有舍入误差的情况下经过有限次运算可求得方程组的精确解的方法,因此也称为精确法。
当系数矩阵是方的、稠密的、无任何特殊结构的中小规模线性方程组时,Gauss消去法是目前最基本和常用的方法。
如若系数矩阵具有某种特殊形式,则为了尽可能地减少计算量与存储量,需采用其他专门的方法来求解。
Gauss消去等同于矩阵的三角分解,但它存在潜在的不稳定性,故需要选主元素。
对正定对称矩阵,采用平方根方法无需选主元。
方程组的性态与方程组的条件数有关,对于病态的方程组必须采用特殊的方法进行求解。
数值计算方法上机题目11、实验1. 病态问题实验目的:算法有“优”与“劣”之分,问题也有“好”和“坏”之别。
所谓坏问题就是问题本身的解对数据变化的比较敏感,反之属于好问题。
希望读者通过本实验对此有一个初步的体会。
数值分析的大部分研究课题中,如线性代数方程组、矩阵特征值问题、非线性方程及方程组等都存在病态的问题。
病态问题要通过研究和构造特殊的算法来解决,当然一般要付出一些代价(如耗用更多的机器时间、占用更多的存储空间等)。
问题提出:考虑一个高次的代数多项式re x xex x*****-==141.≈)61∏=-=---=201)()20)...(2)(1()(k k x x x x x p (E1-1)显然该多项式的全部根为l ,2,…,20,共计20个,且每个根都是单重的(也称为简单的)。
现考虑该多项式方程的一个扰动0)(19=+xx p ε (E1-2)其中ε是一个非常小的数。
用追赶法求解三对角方程组

用追赶法求解三对角方程组1. 三对角方程组的背景大家好,今天咱们来聊聊一个有点学术味儿的话题——三对角方程组。
不过别担心,我会尽量让这件事情变得轻松有趣,就像跟朋友聊天一样。
三对角方程组呢,其实就是那些系数在对角线附近的线性方程组,听起来是不是有点复杂?别急,咱们慢慢来,打个比方,它就像是一个田字格,只在主要的对角线上有数字,其他地方都是零。
哎,生活中有很多时候我们会遇到这样的方程,比如在物理、工程或者计算机科学里。
这时候,咱们就得想办法求解它们。
2. 追赶法的简介2.1 追赶法是什么好啦,接下来咱们来介绍一下追赶法。
这法子听上去是不是有点像小时候玩捉迷藏的感觉?其实它就是一种巧妙的迭代算法,专门用来解决那些三对角的线性方程组。
为什么叫追赶法呢?因为它能快速“追赶”到正确的解,就像小兔子在草地上跑得飞快一样。
它的基本思路就是把这个三对角方程组转化为一个更简单的形式,从而一步一步找到答案。
2.2 为什么用追赶法那为什么不直接用其他的方法呢?哦,朋友们,真相是,追赶法在处理这类方程的时候特别高效,速度快得像闪电!想象一下,如果你在一场马拉松里,你会选择走路还是飞奔?当然是飞奔啦!同样的道理,追赶法能节省大量的计算资源和时间,让我们轻松愉快地拿到想要的解。
3. 追赶法的步骤3.1 初始准备咱们要开始追赶了,首先得准备一下。
你需要把方程组写成标准的形式,通常我们可以把它表示成一个矩阵。
这样一来,咱们就能更清晰地看到那些三角形的结构。
接着,得设定好初始条件,这就好比你出发前检查好背包里有没有水、食物和地图。
没有这些东西,你可不敢贸然出门啊!3.2 逐步追赶准备好之后,追赶法就开始工作了。
第一步,咱们需要对三角形的每一行进行“消元”,也就是让下面的元素逐渐变为零。
听起来是不是有点复杂?其实就像在厨房里切菜,先把最上面的部分处理掉,然后逐步往下进行。
一步一步来,绝对不能急,这样才能确保每一刀都精准无误。
接着,咱们要开始反向代入,也就是从最后一行开始,逐行算出未知数。
第4节 追赶法

此时,在完成并存贮矩阵L和U后,右端项第改变一次仅 需增加 n2 次运算。
2. 可以用以求可逆矩阵 A 的逆矩阵 A-1
令 A-1 = ( X1 X2 … Xn ), E=(e1 e2 … en )
则由 AA-1=E 得到 A( X1 X2 … Xn )= (e1 e2 … en ) 推得 如果 A Xk= e k ,k=1,2,… ,n A=LU, 则有 UYk= e k L Xk = Y k k=1,2,… ,n
b1 a 2
b1 a 2
1 1 1 b2 c2 2 2 1 2 a 3 b3 3 3 c n 1 n 1 a n bn n n 1 第3列 0 0 bi ai i 0,,0, i , i ,0,,0 i 1 i -1行 1 i-1列 , i 1,2,, n i i 1 i 0 0 c1
b1 a 2
2 n 1 1 第3列
i 2,3,, n
于是,由以上结果: ci i i , i 1,2,, n
bi i i 1 i , i 1,2,, n ai i , i 2,3,, n
2 1 0 0 1 2 1 0 0 1 2 1 0 0 1 2
1 2 1 0 0
0 2 3 1 0
0 0 3 4 1
求解方程组Ly=y,即
2 1 0 0 0 3 2 1 0 0 0 4 3 1 0 1 0 y1 y 2 0 0 y 3 0 5 y4 1 4
matlab追赶法求解三对角方程组
matlab追赶法求解三对角方程组追赶法是一种求解三对角方程组的有效方法,可以通过简化矩阵的求解过程来提高计算效率。
以下是使用追赶法求解三对角方程组的具体步骤:1. 将三对角矩阵表示为下三角矩阵L、上三角矩阵U和对角矩阵D的乘积形式:A=LDU,其中L是下三角矩阵,U是上三角矩阵,D是对角矩阵。
2. 将方程组Ax=b转化为LDUx=b。
3. 首先使用前向代入法(forward substitution)解下三角方程Ly=b,其中y是临时向量。
4. 然后使用对角方程Dz=y解决z=D^-1y,其中z是临时向量。
5. 最后使用后向代入法(backward substitution)解上三角方程Ux=z,得到方程组的解x。
追赶法的时间复杂度为O(n),相比于高斯消元法等其他方法,追赶法在求解三对角方程组时具有更快的计算速度。
在MATLAB中可以使用专门的函数tridiag来实现追赶法,示例如下:```matlabfunction x = tridiag_solver(a, b, c, d)n = length(b);% 前向代入for i = 2:nm = a(i) / b(i-1);b(i) = b(i) - m * c(i-1);d(i) = d(i) - m * d(i-1);end% 后向代入x = zeros(n, 1);x(n) = d(n) / b(n);for i = n-1:-1:1x(i) = (d(i) - c(i) * x(i+1)) / b(i);endend```其中a、b和c分别是三对角方程组的次对角线、主对角线和超对角线上的元素,d是方程组的右侧常数向量。
函数返回方程组的解x。
数值计算课堂提问(含参考答案)
数值计算课堂提问(含参考答案)课堂提问及参考答案第1章误差与误差分析1、在数值计算⽅法中,误差是如何分类的?答:误差按照来源可以分为4类:模型误差、观测误差、截断误差和舍⼊误差。
其中,在本门课程中,前两种误差可称为固有误差,⽆法避免和改变;后两种误差可称为计算误差,是本门课程分析和研究的重点。
另外,按照误差产⽣的过程,也分为过失误差和传播误差。
2、求解⽅程x^2-56x+1=0的根。
(已知根号783约为27.982。
)答:根据⼆项式的求根公式可得783282456562422±=-±=-±-=a ac b b x即982.55982.2728783281=+≈+=x为避免相近数相减,从⽽丧失⼤量的有效数字,另⼀个根的计算可写成如下形式:017863.0982.551982.27281783281783282≈=+≈+=-=x第2章⾮线性⽅程的数值解法1、证明1-x-sin(x)=0在区间[0,1]内有⼀个根,若使⽤⼆分法求误差不⼤于 0.5*10^(-4)的根要⼆分多少次?若取)sin(1)(x x -=?,能否⽤不动点迭代法求根?答:令f(x)= 1-x-sin(x),显见f(x)为连续函数。
f'(x)=-1-cos(x),当x 在区间[0,1]时,0f(0)=1>0,f(1)=-sin(1)<0,即f(0)*f(1)<0,可得区间[0,1]内有且只有⼀个实根。
根据题意:a=0,b=1,ε=0.5*10^(-4)由公式(2.4):2 ln 2ln )ln(ε-->a b k 可得3.132ln 10ln 42ln 10ln 1ln 4≈=->-k ,取k=14,即需要⼆分14次。
取迭代公式)sin(1)(x x -=?,则1)1sin(1)1(,1)0sin(1)0(<-==-=??,即当x 在区间(0,1]时,]1,0[)(?x ?,1cos )('<=x x ?根据定理2.4(p23),该迭代公式在取迭代初值在(0,1]时,收敛,可求出根。
解三对交线方程组的追赶法

VS
矩阵元素的微小变化
在三对交线方程组中,矩阵元素的微小变 化可能会导致解的巨大变化。这种敏感性 使得追赶法在面对某些问题时表现出数值 不稳定性。
提高数值稳定性和减小误差方法
选择合适的算法参数
在追赶法中,可以通过选择合适的算法参数来提高数值稳定性。例如,可以采用部分选主元策略来避免矩阵元素的微 小变化对解的影响。
优缺点分析
优点
追赶法具有计算量小、存储量低、易于编程实现等优点。对于大规模的三对角 线性方程组,追赶法通常比其他方法更加高效。
缺点
追赶法的适用范围有限,仅适用于系数矩阵为三对角矩阵的线性方程组。此外, 当系数矩阵不满足对角占优等条件时,追赶法可能无法收敛或收敛速度较慢。
Part
02
三对交线方程组数学模型建立
问题描述与定义
三对交线方程组
在二维平面上,给定三对直线,每对直线相交于一个点,这三对交线构成的方程组称为三对交线方程 组。
求解目标
通过给定的三对交线信息,求解出这三对直线的交点坐标。
数学模型构建方法
直线方程表示
在二维平面上,一条直线可以用一般式方程 $Ax + By + C = 0$ 表示,其中 $A, B$ 不同时为0。
THANKS
感谢您的观看
回代过程
从最后一个方程开始,依次将已知量代入方程求 解,得到未知量的值。此过程称为回代过程。
关键算法实现技巧
存储优化
追赶法中的系数矩阵是三对角 的,因此可以采用一维数组进 行存储,节省存储空间。
消元技巧
在消元过程中,需要注意消元 顺序和消元系数的选择,以确 保消元过程的稳定性和效率。
回代技巧
在回代过程中,需要按照正 确的顺序将已知量代入方程 求解,避免计算错误。
数值分析的实验报告

数值分析的实验报告数值分析的实验报告导言数值分析是一门研究数值计算方法和数值计算误差的学科,它在科学计算、工程技术和社会经济等领域具有广泛的应用。
本实验旨在通过对数值分析方法的实际应用,验证其有效性和可靠性。
实验一:方程求根方程求根是数值分析中的基础问题之一。
我们选取了一个非线性方程进行求解。
首先,我们使用二分法进行求解。
通过多次迭代,我们得到了方程的一个近似解。
然后,我们使用牛顿法进行求解。
与二分法相比,牛顿法的收敛速度更快,但需要选择一个初始点。
通过比较两种方法的结果,我们验证了牛顿法的高效性。
实验二:插值与拟合插值与拟合是数值分析中常用的数据处理方法。
我们选取了一组实验数据,通过拉格朗日插值法和最小二乘法进行插值和拟合。
通过对比两种方法的拟合效果,我们验证了最小二乘法在处理含有噪声数据时的优势。
同时,我们还讨论了插值和拟合的精度与样本点数量之间的关系。
实验三:数值积分数值积分是数值分析中的重要内容之一。
我们选取了一个定积分进行计算。
首先,我们使用复化梯形公式进行积分计算。
通过增加分割区间的数量,我们得到了更精确的结果。
然后,我们使用复化辛普森公式进行积分计算。
与复化梯形公式相比,复化辛普森公式具有更高的精度。
通过比较两种方法的结果,我们验证了复化辛普森公式的优越性。
实验四:常微分方程数值解常微分方程数值解是数值分析中的重要应用之一。
我们选取了一个常微分方程进行数值解的计算。
首先,我们使用欧拉方法进行数值解的计算。
然后,我们使用改进的欧拉方法进行数值解的计算。
通过比较两种方法的结果,我们验证了改进的欧拉方法的更高精度和更好的稳定性。
实验五:线性方程组的数值解法线性方程组的数值解法是数值分析中的重要内容之一。
我们选取了一个线性方程组进行数值解的计算。
首先,我们使用高斯消元法进行数值解的计算。
然后,我们使用追赶法进行数值解的计算。
通过比较两种方法的结果,我们验证了追赶法在求解三对角线性方程组时的高效性。
追赶法解三对角方程组

追赶法解三对角方程组追赶法解三对角方程组,这个话题听起来可能有点复杂,但其实就像我们生活中的许多事情一样,慢慢来就好。
想象一下你在追一个小兔子,兔子在草地上跳来跳去,你得不断调整自己的步伐来追上它。
三对角方程组就是在数学世界里,跟兔子玩追逐游戏。
咱们一般能看到这种方程组,它们的特点就是在主对角线上有一堆数字,旁边的对角线上也有一些数值,但其它地方几乎是空空如也,就像你打麻将时,只留下了几张关键牌,剩下的都是一些废牌。
现在,追赶法就像是一个巧妙的游戏规则,帮助我们一步一步地找到答案。
想象一下,你正在和朋友们进行一场比赛,谁先找到那个隐秘的宝藏。
你得从第一个数开始,就像你起跑一样,注意,别一开始就猛冲。
我们得保持节奏,先一步一步来,找到第一个关键点,然后再往下走。
这个过程里,你可以把每一步都记下来,像是在记录比赛中的每个进展。
你想想,咱们在生活中也常常得这样做,设定目标,逐步达成,每一步都得仔细琢磨。
咱们得来点技巧。
追赶法的核心就是,把大问题分解成小问题,就像吃西瓜时,先切成小块再慢慢享受。
你可以设定一个起始值,这样在解决下一个未知数时,就能依赖上一个已知数,就像你依靠老朋友的支持一样。
不得不提,咱们在追逐的过程中,千万别心急,急了可就容易出错。
就像考试前的复习,细水长流,耐心点,结果自会水到渠成。
这个追赶法就像是打游戏,越玩越熟练。
一开始可能有些不知所措,后来你就会发现,哎呀,其实这没什么大不了的。
你可以通过逐步替换这些值,把复杂的方程组慢慢简化,就像逐步解锁一个个关卡,最终达到终点。
当你完成的时候,心里那种成就感,就像打通了所有关卡,获得了最终大奖,爽得不得了。
在实际应用中,三对角方程组其实也常常出现在工程、物理等等领域。
这就像是大厨在厨房里,调配各种材料做出一道美味佳肴,关键是每种材料的比例得掌握好。
若是调配失误,那可就大功告成后,变成了一锅糊糊。
所以,在应用追赶法时,要时刻保持清晰的思路,别让小问题影响大局。
追赶法

c1 u2 c2 u3 c3 un 2 cn 2 un 1 cn 1 lncn 1 un
cn 1 un
cn 2 ln 1cn 2 un 1 lnun 1
u1 b1 liui1 ai , i 2,3,, n li ci1 ui bi , i 2,3,, n
用追赶法求解该方程的推导过程如下:对矩阵 A 进行 LU 分解,则
1 u1 c1 u2 c2 l2 1 , A LU ln 1 1 un 1 cn 1 ln 1 un
分别计算 li , ui i 2,3,, n ,
u1 b1 li ai /ui 1 , i 2,3,, n ui bi - li ci 1 , i 2,3,, n
至此,我们得到矩阵 L 和 U,然后由
Ax LUx g , Ly g ,Ux y
解得 xi பைடு நூலகம் 1,2,3,, n ,即:由
其中 ci (i=1,2,…, n-1)有矩阵 A 给出,通过计算 L 和 U 两个矩阵的乘积并与矩阵 A 中的各元素比较可以得 到
1 u1 1 l2 l3 1 A LU 1 ln 1 1 ln 1 c1 u1 c2 l2u1 l2c1 u2 l3u2 l3c2 u3 c3 ln 2un 3 ln 2cn 3 un 2 ln 1un 2
追赶法
求解三对角方程组
Ax g
其中,
b1 a2 0 A 0 0
推导过程
c1 b2 a3 0 0
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第37卷 第1期2009年1月 河南师范大学学报(自然科学版)J our nal of H enan N or mal Univ er sity(N atur al Science)V ol.37 N o.1J an.2009文章编号:1000-2367(2009)01-0013-04追赶法在求解循环和拟循环三对角方程组中的一种推广刘 晓,李文强(河南师范大学数学与信息科学学院,河南新乡453007)摘 要:针对循环或者拟循环三对角方程组,仿照追赶法的思想,给出了一种求解这两类方程组的追赶算法.该算法在求解循环和拟循环三对角方程组时用到的乘法和除法运算次数仅为8N和3N次,与传统计算循环三对角方程组的算法相比,提高了计算效率.数值试验表明,对于百万至千万阶的拟三对角方程组,本算法都可以在几秒内给出准确结果.关键词:追赶法;循环三对角;拟循环三对角;线性方程组中图分类号:O241.6 文献标识码:A在科学和工程计算中,常常会遇到用追赶法求解三对角方程组的问题.一些高精度的差分格式[1-2]以及计算样条函数等[3],如果能够用追赶法来求解这些方程组,不管是在单机还是在并行集群系统上[4],计算效率都会大大提高.因此,对追赶法的深入研究一直是科学和工程计算人员研究的热点问题之一[5-9].在实际计算中遇到的方程组的系数矩阵有时并非是严格三对角的,只是在系数矩阵的边角位置上出现了一些非零元,例如下面的循环三对角方程组:a1b10 c1 c2a2b20 0 0c3a3b3 00 c N-1a N-1b N-1b N 0c N a Nx1x2x3x N-1x N=s1s2s3s N-1s N.(1)从而导致无法直接应用追赶法来求解,如果采用其它的直接算法或者普通的迭代算法计算量又会很大.因此,研究人员就试图采用追赶法的思想来有效解决这类问题,胡友秋和傅竹风[10],李青和王能超[8]以及王兴波和钟志华[8]对这种三对角方程组进行了深入研究,并发展了一套相对高效的算法.本文将在此基础上进一步提高这类方程组的求解效率,另外本文发展的算法还适合求解如下的类似于(1)式但与(1)式又有差别的拟循环三对角方程组,这种拟循环三对角方程组也是数值计算中经常遇到的,比如在跳点网格(Stagg er ed grid)中用对称紧致差分格式对流体力学方程进行离散时就会出现形如(2)式的方程组[11].为了本文叙述的方便,称(1)式为循环三对角方程组,称(2)式为拟循环三对角方程组:a1b10 c10 c2a2b20 0 0c3a3b3 0 0 c N-1a N-1b N-1 0b N 0c N a Nx1x2x3x N-1x N=s1s2s3s N-1s N.(2)收稿日期:2008-01-21;修回日期:2008-09-26基金项目:973国家重大基础研究计划(2006CB806306);河南师范大学博士启动经费和青年基金共同资助作者简介:刘 晓(1980-),男,河南邓州人,河南师范大学讲师,博士,研究方向:数值计算和中高层大气动力学.14河南师范大学学报(自然科学版) 2009年1 循环三对角方程组的求解过程第一类三对角!方程组的系数矩阵与通常的三对角矩阵相比,左下角和右上角各多出一个非零元素,因而在解法上与通常的追赶法稍有区别,这类方程组的解法在胡友秋和傅竹风编写的∀空间等离子体数值模拟#中有详细的论述[10].为了推导拟循环三对角方程组的需要和比较的方便,本文将对此解法作一概括介绍.下面就来介绍这类循环三对角方程组的具体求解步骤和有关公式.首先,与普通追赶法的推导过程类似,通过Gauss消去法将(1)式化成如下的代数方程组:x1+q1x2+p1x N=v1,(3)x i+q i x i+1+p i x N=v i,(i=2,3, ,N-1),b N x1+c N x N-1+a N x N=s N.比较(1)式和(3)式中的第1式,显然有q1=b1/a1,p1=c/a1,v1=s1/a1.下面求q i,p i和v i的递推表达式.设q i-1,p i-1和v i-1已经求得,它们满足(3)式中第2式,其中x i-1可通过(1)式中的第i个方程消去,再与(3)式比较,可得q i,p i和v i的递推表达式如下,q i=(a i-c i q i-1)-1b i,i=2,3, ,N-2,p i=-(a i-c i q i-1)-1c i p i-1,i=2,3, ,N-1,v i=(a i-c i p i-1)-1(s i-c i v i-1),i=2,3, ,N-1.由左下角的非零元带来的另一批附加运算与(3)式中的第3式有关.通过运用(3)式中的第1和第2式,可逐次将(3)式中的第3式化为:b∃i x i+c N x N-1+a∃i x N=s∃i,(4)当i=1时,上式即为(3)式中的第3式,故有b∃1=b N,a∃1=a N,s∃1=s N.下面求b∃i,a∃i和s∃i的递推表达式.设b∃i-1,a∃i-1和s∃i-1已经求得,它们满足(4)式,再结合(3)式中的第2式可以消去,与(4)式相比较,可得b∃i,a∃i和s∃i的递推表达式如下b∃i=-b∃i-1q i-1,a∃i=a∃i-1-b∃i-1p i-1, s∃i=s∃i-1-b∃i-1v i-1,i=2,3, ,N-1.当递推到i=N-1步时,利用方程(4)以及对(3)式中的第2式取下标i=N-1,可以消去x N-1,最终解得x N=[a∃N-1-(b∃N-1+c N)(q N-1+p N-1)]-1[s∃N-1-(b∃N-1+c N)v N-1].求得x N之后,再根据(3)式中的第2式逐层向上解出x i=v i-q i x i+1-p i x N,(i=N-1,N-2, ,1).从本算法的推导过程中可以看出,在求解循环三对角方程组时,所用的乘法和除法次数分别为8N和3N次,稍小于传统算法的计算量(分别为9N乘法和4N除法或者10N乘法和3N除法)[9].2 拟循环三对角方程组的求解过程(2)式与(1)式的矩阵相比,非零元素分别出现在左下角和右上角的第2列和第N-2列上,因此采用与求解循环三对角方程组类似的方法来推导这种方程组的解法.下面就来介绍这种解法的具体步骤和有关公式.与循环三对角方程组求解类似,首先通过Gauss消去法将(2)式化为如下的代数方程:x1+q1x2+p1x N-1=v1,x i+q i x i+1+p i x N-1=v i,(i=2,3, ,N-2)(5)c N-1x N-2+a N-1x N-1+b N-1x N=s N-1,b N x2+c N x N-1+a N x N=s N,比较(2)式中的第1式和(5)式中的第1式,显然有q1=b1/a1,p1=c1/a1,v1=s1/a1.下面求q i,p i和v i的递推表达式.设q i-1,p i-1和v i-1已经求得,它们满足(5)式中的第2式,再通过方程(2)式中的第i个方程消去x i-1,并与(5)式中的第2式比较,可得q i,p i和v i的递推表达式如下:i,i=2,3, ,N-3,1c i p i-1,i=2,3, ,N-2,-c i v i-1),i=2,3, ,N-2.由拟循环三对角矩阵中最后1行的第2个非零元带来的另一批附加运算与(5)式中的第3式和第4式有关.从(5)式中的第4式中可以消去x N ,得到:dx 2+ex N-2+gx N-1=h,(6)其中,d =b N b N-1,e =-a N c N-1,g =c N b N-1-a N a N-1,h =b N-1s N -a N s N-1.通过运用(5)中的第1式和第2式,可逐次将(6)式化为:b ∃i x i +ex N-2+a ∃i x N -1=s ∃i ,(7)当i =2时,(7)式即为(6)式,故有b ∃1=d,a ∃1=g ,s ∃1=h.下面求b ∃i ,a ∃i 和s ∃i 的递推表达式.设b ∃i-1,a ∃i-1和s ∃i-1已经求得,它们满足(7)式.在(5)式中的第2式取(i -1)为下标消去x i-1,并与(5)式相比较,可得b ∃i ,a ∃i 和s ∃i 的递推表达式如下:b ∃i =-b ∃i-1q i-1,a ∃i =(a ∃i-1-b ∃i-1p i-1),s ∃i =s ∃i-1-b ∃i-1v i-1,(i =2,3, ,N -1).当递推到i =N -2步时,方程(7)可以写成(b ∃n -2+e)x N-2+a ∃N-2x N-1=s ∃N-2,由(5)式中的第2式取i =N -2为下标,再结合上式消去x N -2,可最终解得x N-1=[a ∃N-2-(b ∃N-2+e)(q N-2+p N-2)]-1[s ∃N-2-(b ∃N-2+e)v N-2],求得x N-1之后,再根据(5)式中的第2式向上逐层解出x i =v i -q i x i+1-p i x N-1,(i =N -2,N -3, ,1),最后,用(5)式中的第4式可求得x N .从本算法的推导过程中可以看出,在求解拟循环三对角方程组时,所用的乘法和除法次数也分别为8N 和3N 次,与求解循环三对角方程组的计算量相当.3 数值试验在周期性边界条件下,利用四阶紧致跳点差分格式对流体力学方程进行离散时,会出现前面讨论的循环和拟循环三对角方程组.用该差分格式计算函数f (x )的一阶导数f ∃(x )的公式如下[11],f ∃(x i-1)+22f ∃(x i )+f ∃(x i+1)=24f (x i+1/2)-f (x i-1/2)x i +1/2-x i-1/2,f ∃(x i-1/2)+22f ∃(x i+1/2)+f ∃(x i+3/2)=24f (x i+1)-f (x i )x i+1-x i,对水平方向的动量方程中的水平偏导数项进行离散式,会出现第1式,对连续性方程、垂直方向的动量方程和能量方程中的水平偏导数项进行差分离散时会出现第2式.这两种方程组的求解方法已成功地运用在本文作者建立的模拟中高层大气重力波非线性传播的数值模式中,与其他算法相比,较大的提高了计算效率[12].表1 拟三对角方程组的求解时间方程组的阶数1%1062%1064%1068%10610%106计算(CPU )时间/s0.1560.3320.9843.9124.880作为算例,这里用第2式计算f (x )=sin (x ),x &[0,2 ]的一阶导数,此时,将形成一个拟三对角线性方程组,即(2)式中的a i =22/24,b i =c i =1/22,(i =1,2, n).数值试验的平台是PC 机,操作系统是Federa Cor e 5.0,使用Fo rtran 语言编程,数据类型为双精度浮点型.方程组的阶数和计算时间如表1所示.从表1中可以看出,本算法对于百万至千万阶的拟三对角方程组都可以在几秒内给出结果,这也说明了本算法是比较高效的.4 结 论本文针对工程和科学计算中通常会出现的循环和拟循环三对角方程组,仿照追赶法的推导过程,给出了一种求解这类方程组的高效算法,推广了追赶法的应用范围.在求解循环和拟循环三对角方程组时,所用的乘法和除法次数分别为8N 和3N 次,稍小于传统算法的9N 次乘法和4N 次除法以及10N 次乘法和3N 次除法,从而提高了计算效率.参 考 文 献[1]马明书,姚 慧.抛物型方程的一族高精度恒稳定的隐式差分格式[J ].河南师范大学学报(自然科学版),2001,29(2):6-8.15第1期 刘 晓等:追赶法在求解循环和拟循环三对角方程组中的一种推广16河南师范大学学报(自然科学版) 2009年[2] 马明书,沈高峰,谷淑敏,等.高维抛物形方程的高精度很稳定的LOD格式[J].河南师范大学学报(自然科学版),2008,36(4):25-27.[3] 王省富.样条函数及其应用[M].西安:西安交通大学出版社,1989.[4] 迟利华,刘 杰,李晓梅.三对角线性方程组的一种有效并行算法[J].计算机学报,1999,22(2):218-221.[5] T emp erton C.A algorithm for solution of cyclic tridiagonal systems[J].J Com put Physics,1975,19(2):317-323.[6] Boisvert R F.Algorithms for s pecial tridiag on al sys tems[J].SIAM S CI S tat Com put,1991,12(2):423-442.[7] Ghorai S,H ill S N A.Periodic arrays of gyr otactic plum es in bioconvection[J].phys ics of Fluids,2000,12(1):5-12.[8] 李 青,王能超.解循环三对角线性方程组的追赶法[J].小型微型计算机系统,2002,23(11):1393-1395.[9] 王兴波,钟志华.求解周期性三对角方程组的广义T homas算法[J].计算力学学报,2004,21(1):73-76.[10] 胡友秋,傅竹风.空间等离子体数值模拟[M].合肥:安徽科学技术出版社,1995.[11] S anthanam N,Lele S K,Ferziger J H.A rob ust hig h-order compact method for large eddy simu lation[J].J Comput Ph ys,2003,191:392-419.[12] 刘 晓,徐寄遥,马瑞平.重力波与潮汐之间的非线性相互作用[J].中国科学D辑:地球科学,2007,37(7):990-996.An Extension of Chasing Method for Solving Circular andQuasi Circular Tridiagonal SystemsLIU Xiao,LI Wen qiang(College of M ath ematics and Information S cien ce,H enan Normal U nivers ity,Xinxiang453007,Ch ina)Abstract:Based o n the idea o f chasing method,a new alg or ithm is develo ped to so lv ing the cir cular and quasi circular tridiag onal sy stems in this paper.T he comput ational costs o f multiplicatio n and divisio n are8N and3N,respect pared w ith the t raditio nal method,the new chasing metho d sav es the co mputational co st.T he numerica l ex periments indicate that,the exact solutions can be obtained in sever al seconds by using this method.Key words:chasing method;circular tridiag onal sy st em;quasi cir cular tr idiago na l system;linear equations(上接第12页)[5] N ou sair E S,Sw anson C A.Pos itive solutions of quasilinear elliptic equations in exterior domains[J].J M ath An al Appl,1980,75:121-133.[6] S chmitt K.Bou ndary value problems for quasilinear secon d order elliptic equations[J].Nonlinear Anal,1978,2(3):263-309.[7] Ladyzenskaya O A,Ural't reva N N.Linear and quasilin ear elliptic equ ations[M].New York:Acad emic Press,1968.[8] Gilb arg D,T rudinger N S.E lliptic partial differen tial equations of second order[M].2nd,Berlin:S pringer Verlag,1983.Existence of Positive Explosive Solutions of NonlinearElliptic Equations with Gradient TermLI Xiao cui1,ZH ANG Chao1,YAO M iao x in2(1.Scho ol o f Science,H ebei Eng ineer U nive rsity,H andan056038,Chi na;2.Sc ho ol o f Science,T i anji n U ni v ersity,T ianji n300072,Chi na)Abstract:L et R N(N3)be a C2bo unded doma in,when the gr adient term contains co effcient functions w hich does no t ho ld the same sy mbo l,the ex istence o f po sitiv e ex plo sive so lutions o f nonlinear elliptic equatio n in are co nsidered.So me sets o f suitable conditio ns are g iven by using the ex plosive super subso lutio n method and Schauder inner est imatio n theor y, which guar antee the exist ence of ex plosiv e po sitiv e so lutio ns respect ively.Key words:no nlinear elliptic equation;g radient term;ex plo sive solut ions;super subso lutio ns。