遥感图像的几何校正
遥感图像几何校正

第4讲遥感图像几何校正遥感成像的时候,由于飞行器的姿态、高度、速度以及地球自转等因素的影响,造成图像相对于地面目标发生几何畸变,这种畸变表现为像元相对于地面目标的实际位置发生挤压、扭曲、拉伸和偏移等,针对几何畸变进行的误差校正就叫几何校正。
几何校正是利用地面控制点和几何校正数学模型来矫正非系统因素产生的误差,由于校正过程中会将坐标系统赋予图像数据,所以此过程包括了地理编码。
在开始介绍ENVI的几何校正操作之前,首先对ENVI的几何校正几个功能要点做一个说明。
1几何校正方法(1)利用卫星自带地理定位文件进行几何校正对于重返周期短、空间分辨率较低的卫星数据,如A VHRR、MODIS、SeaWiFS等,地面控制点的选择有相当的难度。
这时,可以利用卫星传感器自带的地理定位文件进行几何校正,校正精度主要受地理定位文件的影响。
(2) image to image几何校正通过从两幅图像上选择同名点(或控制点)来配准另外一幅栅格文件,使相同地物出现在校正后的图像相同位置(3)image to map几何校正通过地面控制点对遥感图像几何进行平面化的过程。
(4)image to image 自动图像配准根据像元灰度值或者地物特征自动寻找两幅图像上的同名点,根据同名点完成两幅图像的配置过程。
(5)image registration workflow流程化工具将具有不同坐标系、不同地理位置的图像配准到同一坐标系下,使图像中相同地理位置包含相同的地物。
2控制点选择方式ENVI提供以下选择方式:∙从栅格图像上选择如果拥有需要校正图像区域的经过校正的影像、地形图等栅格数据,可以从中选择控制点,对应的控制点选择模式为Image to Image。
∙从矢量数据中选择如果拥有需要校正图像区域的经过校正的矢量数据,可以从中选择控制点,对应的模式为Image to Map。
∙从文本文件中导入事先已经通过GPS测量、摄影测量或者其他途径获得了控制点坐标数据,保存为以[Map (x,y), Image (x,y)]格式提供的文本文件可以直接导入作为控制点,对应的控制点选择模式为Image to Image 和Image to Map。
遥感影像的几何校正方法与技巧

遥感影像的几何校正方法与技巧遥感影像是通过遥感技术获取到的地球表面的图像信息。
在遥感应用中,几何校正是一项非常重要的工作,它可以提高遥感影像的地理准确度和精度。
几何校正是指将影像与地理坐标系统进行一致性匹配,消除由于卫星平台姿态、扫描仪器误差等因素引起的像素位置偏差,使得影像能够准确地反映地球表面的真实位置。
一、几何校正的方法1. 基于控制点的校正方法这是最常用的几何校正方法,它通过选取一些地面上具有已知地理位置的标志物作为控制点,然后通过对其在影像上的位置进行测量,计算出转换参数,从而实现影像校正。
常见的控制点包括标志物、道路、河流等。
2. 基于全局栅格校正方法全局栅格校正方法是一种较为简单但精度相对较低的方法,它通过对整个影像进行平移、旋转和缩放等操作,以使校正后的影像与地理坐标系统的一致性较好。
3. 基于形变模型的校正方法除了平移、旋转和缩放等刚性变换外,影像在校正过程中往往还需要进行非刚性的形变操作,以适应地貌复杂、存在高程变化的地区。
基于形变模型的校正方法可以通过建立影像的形变模型,对不同区域进行适应性校正,从而提高几何校正的精度。
二、几何校正技巧1. 标志物选取的注意事项在进行几何校正时,选择合适的标志物对于提高校正精度至关重要。
应选择具有明显几何形状、易于在影像上检测和测量的标志物,例如明显的道路交叉口、建筑物的棱角等。
此外,这些标志物应分布在整个影像区域内,避免出现局部区域校正误差过大的情况。
2. 利用地形高程信息进行校正地形高程信息对于影像的几何校正具有重要作用。
在进行几何校正时,如果有数字高程模型(DEM)数据可用,可以将地形高程信息与影像的几何信息相结合,从而进一步提高几何校正的精度。
3. 考虑大气影响大气对于遥感影像的几何校正同样具有一定的影响。
在进行几何校正前,应先进行大气校正,消除大气造成的影响,提高校正精度。
4. 多尺度校正在进行几何校正时,可以考虑多尺度校正,即根据不同的应用需求,对不同尺度的影像进行校正处理。
遥感图像的几何校正
分辨率:采用线对/毫米
f
Rg
Rs f H
Rg 为地面分辨率
H
H 为航高
Rs 为系统分辨率 f 为摄影机焦距
IKONOS 图像,1m分辨率
由于地形起伏 引起的平面上 的点位在相片 位置上的移动, 这种现象称为 像点位移,其 位移量就是中 心投影与垂直 投影在同一水 平面上的“投 影误差”
9个一定 高度的柱 子,影像 中心正射 投影,只 能看到顶; 其余成像 后放射状 的向外倒
物辐射状向外 称的向两侧倒,低
倒,低于基准 于基准面地物对称 面地物辐射状 的向中间倒 向内倒
高出基准面地物对
称的向两侧倒,低
于基准面地物对称 的向中间倒
传感器成像方式引起的图像变形 传感器外方位元素变化的影响 地形起伏引起的像点位移 地球曲率引起的图像变形 大气折射引起的图像变形 地球自转的影响
y f a12 ( X P X S ) a22 (YP YS ) a32 (ZP ZS ) a13 ( X P X S ) a23 (YP YS ) a33 (ZP ZS )
➢如辐射计、红外辐射计、微波辐射计、微波高 度计等
遥感 传感 器的 几何 投影 方式
中心投影类型:分幅式摄影机、面阵列 CCD传感器
掸扫式(逐点):光/机
扫描成像、镜头转动式 摄影机
多中心投影类型
推扫式(逐线) :固体 自扫描成像、狭缝式摄 影机
斜距投影成像仪: 侧视雷达等
不同类型成像传感器,其成像原理和投影方式也不同
➢ 中心投影构像方程 ➢ 多中心投影构像方程
➢推扫式传感器的构像方程 ➢扫描式传感器的构像方程
中心投影像片坐标与地面点大地坐标的关系:
X X
x
遥感图像处理—几何校正

遥感图像处理—⼏何校正 本节将从原理和代码两个⽅⾯讲解遥感图像的⼏何校正。
原理 ⾸先介绍⼏何校正的概念:在遥感成像过程中,传感器⽣成的图像像元相对于地⾯⽬标物的实际位置发⽣了挤压、扭曲、拉伸和偏移等问题,这⼀现象叫做⼏何畸变。
⼏何畸变会给遥感图像的定量分析、变化检测、图像融合、地图测量或更新等处理带来的很⼤误差,所以需要针对图像的⼏何畸变进⾏校正,即⼏何校正。
⼏何校正分为⼏何粗校正和⼏何精校正。
粗校正是利⽤空间位置变化关系,采⽤计算公式和辅助参数进⾏的校正,叫做系统⼏何校正;精校正是在此基础上,使图像的⼏何位置符合某种地理坐标系统,与地图配准,调整亮度值,即利⽤地⾯控制点(GCP)做的⼏何精校正。
⼏何校正步骤:1.空间位置的变换(像元坐标)2.像元灰度值的重新计算,即重采样。
1. 坐标变换 坐标变换分为直接法和间接法。
1)直接法:从原始图像阵列出发,依次计算每个像元在输出图像中的坐标。
直接法输出的像元值⼤⼩不会发⽣变化,但输出图像中的像元分布不均匀。
2)间接法:从输出图像阵列出发,依次计算每个像元在原始图像中的位置,然后计算原始图像在该位置的像元值,再将计算的像元值赋予输出图像像元。
此⽅法保证校正后的图像的像元在空间上均匀分布,但需要进⾏灰度重采样。
该⽅法是最常⽤的⼏何校正⽅法。
由上图可见,直接法直接以原始图像的坐标为基准点,坐标偏移到校正后的图像,坐标的位置有很多出现在了像元的中间位置,所以直接输出像元值⼤⼩导致像元分布不均匀。
⽽对于间接法。
以输出图像的坐标为基准点,已经定义在了格点的位置上,此时反算出该点在原始图像上对应的图像坐标,坐标多数落在像元的中间位置。
这⾥采⽤最邻近法、双线性内插和三次卷积法来计算该点的灰度值,达成重采样的⽬的。
2. 重采样 图像数据经过坐标变换之后,像元中⼼的位置发⽣改变,其在原始图像的位置不⼀定是整数⾏\列,需要根据输出图像各像元在原始图像中对应的位置,对原始图像重采样,建⽴新的栅格矩阵。
实验七 遥感图像几何精校正

图像几何校正遥感图像的几何纠正是指消除影像中的几何形变,产生一幅符合某种地图投影或图形表达要求的新影像。
一般常见的几何纠正有从影像到地图的纠正,以及从影像到影像的纠正,后者也称为影像的配准。
遥感影像中需要改正的几何形变主要来自相机系统误差、地形起伏、地球曲率以及大气折射等。
几何纠正包括两个核心环节:一是像素坐标的变换,即将影像坐标转变为地图或地面坐标;二是对坐标变换后的像素亮度值进行重采样。
一、影像到影像的几何纠正1、打开并显示图像文件在ENVI主菜单栏中,选择File →Open Image F ile,打开参考影像(这里以SPOT图像为例)和需校正影像(这里以TM图像为例)。
它们将分别显示在Display窗口,如图2.12所示。
图2.12 待纠正影像和参考影像显示图2、启动几何纠正模块(1)在ENVI主菜单中,选择Map→Registration→Select GCPs:Image to Image,弹出Image to Image Registration几何纠正模块对话框。
(2)选择显示参考影像(SPOT文件)的Display为基准图像的(Base Image),显示需校正影像(TM文件)的Display为待纠正图像(Warp Image)(如图2.13所示)。
(3)点击OK按钮,弹出Ground Control Point Selection对话框,进行地面控制点的采集,如图2.14所示。
图2.14 地面控制点选择对话框图2.13 选择基准影像与待纠正影像3、采集地面控制点在图像几何纠正过程中,采集地面控制点是一项重要和繁重的工作,直接影响最后的纠正结果,在实际操作中要特别认真和具有耐心。
(1)在Ground Control Point Selection对话框中,选择Options→ Set Point Colors,设置或修改GCP在可用和不可用状态的颜色。
(2)在两个Display中移动方框位置,寻找明显的地物特征点作为输入GCP。
遥感图像的几何校正原理
遥感图像的几何校正原理遥感图像的几何校正原理是指通过对遥感图像进行几何变换,将图像投影到地球表面上的正确位置,以确保图像的几何特征和空间位置的精确性。
遥感图像的几何校正原理是遥感技术中极为重要的一个环节,它涉及到传感器投影模型的建立以及图像的几何校正方法和参数计算等多个方面。
遥感图像的几何校正原理主要包括以下几个方面:1. 传感器的几何投影模型:遥感图像是通过传感器获取到的,而传感器的几何投影模型是校正的基础。
传感器的几何投影模型是描述传感器观测到的像元在地面坐标系中的位置的数学模型,通常包括摄影几何模型和几何投影模型。
摄影几何模型主要用于航片和卫星图像的几何定位,几何投影模型主要用于平面影像和正射影像的几何定位。
根据传感器的类型和几何特性,选择合适的几何投影模型进行校正。
2. 地面控制点的选择:地面控制点是指已知准确地理坐标的地物特征点,通过对图像与地面控制点的匹配,可以确定图像与地面坐标系之间的几何关系。
地面控制点的选择应具有代表性和充分的空间分布,以保证校正的几何精度。
常用的地面控制点包括地面标志物、地物边界等。
3. 图像配准和校正:图像配准是指将图像与地面控制点进行匹配,确定图像在地面坐标系中的位置。
图像校正是通过几何变换将图像投影到正确位置,保证图像的几何特征和空间位置的准确性。
常用的图像校正方法包括多项式变换、分段线性变换和二次变换等。
多项式变换是基于一阶、二阶或高阶多项式函数进行校正的方法,它可以实现图像的平移、旋转、缩放和错切等变换。
分段线性变换是将图像分成若干个区域,然后在每个区域内进行线性变换。
二次变换是将图像分成若干个二次曲面,然后在每个二次曲面内进行变换。
4. 校正参数的计算:校正参数是指用于实现图像校正的参数,一般包括平移、旋转、缩放和错切等参数。
校正参数的计算是校正过程中的关键一步,一般通过最小二乘法、迭代法和控制点测量法等方法来求解。
最小二乘法是一种常用的数学优化方法,通过最小化图像与控制点之间的误差,求解校正参数。
遥感图像的几何校正
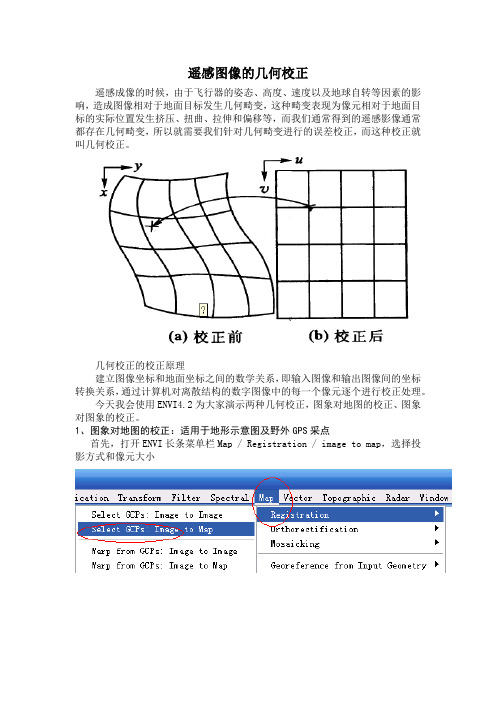
遥感图像的几何校正遥感成像的时候,由于飞行器的姿态、高度、速度以及地球自转等因素的影响,造成图像相对于地面目标发生几何畸变,这种畸变表现为像元相对于地面目标的实际位置发生挤压、扭曲、拉伸和偏移等,而我们通常得到的遥感影像通常都存在几何畸变,所以就需要我们针对几何畸变进行的误差校正,而这种校正就叫几何校正。
几何校正的校正原理建立图像坐标和地面坐标之间的数学关系,即输入图像和输出图像间的坐标转换关系,通过计算机对离散结构的数字图像中的每一个像元逐个进行校正处理。
今天我会使用ENVI4.2为大家演示两种几何校正,图象对地图的校正、图象对图象的校正。
1、图象对地图的校正:适用于地形示意图及野外GPS采点首先,打开ENVI长条菜单栏Map / Registration / image to map,选择投影方式和像元大小注:选点须准确,最好在四倍放大时参照周围地物尽量准确定位,然后将其放大至20倍甚至更多倍数,进一步确定。
步骤4:加完足够多的点后,达到要求精度,Option / Warp file(控制点较均匀分布于全图,18个点以上,RMS Error一般应达到一个像元以内的精度)步骤5:输入待校正的图象,可以选择子集,点击OK,输出保存即可保存控制点文件:控制点对话框File—Save GCPs to ASCII,见下图。
如需再次使用该点文件,则通过前面所说步骤,打开控制点对话框,点击Restore GCPs from ASCII即可。
2、图象对图象的校正:步骤1:同时展示两幅图象,选择主菜单栏Map / Registration / image to image,选择Base image和Warp image图象所在在窗口,Base image:有地理座标的图像。
Warp image:待校正图像步骤2:设置点的颜色步骤3:在base image中选择控制点,在warp image中选择同一控制点,精确定位,Add point步骤4:加完足够多的点后,达到要求精度,Option / Warp file其余步骤同前图象对地图的校正。
遥感实验2遥感图像的几何校正

contents
目录
• 引言 • 遥感图像几何校正的基本原理 • 遥感图像几何校正的步骤 • 实验操作与结果分析 • 问题与解决方案 • 实验总结与展望
01 引言
实验目的
掌握遥感图像几何校 正的基本原理和方法。
了解几何校正对遥感 图像应用的影响。
学会使用遥感软件进 行几何校正操作。
04 实验操作与结果分析
数据准备
数据来源
选择具有代表性的遥感图像,确保数据质量可靠且具有实际 应用价值。
数据预处理
对原始数据进行必要的预处理,如辐射定标、大气校正等, 以提高几何校正精度。
实验操作过程
几何校正方法选择
根据遥感图像的特点和实际需求,选择合适的几 何校正方法,如多项式校正、仿射变换等。
THANKS FOR WATCHING
感谢您的观看
06 实验总结与展望
实验收获与体会
实验收获
通过本次实验,我深入了解了遥感图像 的几何校正方法,掌握了常用的校正算 法。
VS
实验体会
在实验过程中,我遇到了很多困难和挑战 ,但通过不断尝试和探索,最终成功完成 了实验任务。
对实验的改进建议
算法优化
建议对常用的几何校正算法进行优化,提高校正精度和效率。
不同遥感图像的比例尺可 能存在差异,导致图像拼 接时出现不协调。
问题解决方案
使用地理参考数据
通过地理参考数据对遥感图像进行几何校正,使其与实际地形相 匹配。
图像配准技术
利用图像配准技术,将不同来源的遥感图像进行对齐,消除错位现 象。
调整图像比例尺
通过几何变换算法,调整不同图像的比例尺,使其一致,便于拼接。
数据来源多样性
遥感影像的几何校正

控制点选取标准:校正模型约定控制点数目、
控制点残差评价控制点选取好坏
ReM r roS x rxor2i gyyor2ig
4、重采样内插:为了使校正后的输出图像像元与输入 的未校正图像相对应,根据确定的校正公式,对输入图像的数 据重新排列。在重采样中,由于所计算的对应位置的坐标不 是整数值,必须通过对周围的像元值进行内插来求出新的像 元值。
像几何畸变进行纠正。几何粗校正的服务通常由卫 星接收系统提供, 因此下面重点讨论几何精校正。
❖ 一、几何精校正原理及方法: 从物理上看, 却在彼处。因此可用两种方法 实现畸变图像的校正:
1、把被错置的像素点搬运到该在的位置, 此方法 被称为直接变换法;
2、斜距投影变形 侧视雷达属于距投影,其成像变形规律如图
(二)、传感器外方位元素变化畸变
(三)、地球自转的影响
地球自转对于瞬时光学成像遥感方式没有影响, 对于扫描成像则造成图像的平移错动。
(四)、地球曲率的影响
(五)、地形起伏的影响 中心投影:地形起伏造成像点位移。 垂直投影:不存在像点位移。
图像的校正——几何校正
20092305028 09电信1班 曹远晶
主要内容
❖ 遥感影像几何畸变原因 ❖ 遥感影像几何校正方法
遥感影像几何畸变原因
❖ 一、几何畸变: 遥感图像在获取过程中由于多种原因导致景物
中目标物的相对位置的坐标关系图像中发生变化。
❖ 二、遥感图像几何畸变的来源: (一)、传感器成像几何形态的影响 传感器一般的成像几何形态有中心投影、距投影 以及平行投影等几种不同的类型。 1、全景投变形 红外机械扫描仪、CCD 线阵推帚式传感器
遥感图像的几何校正原理

遥感图像的几何校正原理遥感图像的几何校正是指通过对图像进行空间几何变换,将其投影到地球表面,使得图像中的每一点对应到地球表面上的一个准确位置。
这样做的目的是为了消除图像中由于遥感器在获取图像时的姿态、高度、地球自转等因素造成的图像畸变,并且使得图像能够与地理信息系统中的地图数据进行精确叠加,从而实现对地理空间信息的准确提取和分析。
在遥感图像处理中,几何校正是非常重要的一环,对于后续的遥感信息提取、地图制图和空间分析等应用具有重要的意义。
遥感图像的几何校正原理主要包括以下几个方面:1. 姿态校正:遥感器在获取图像时往往会受到外部因素的影响,导致姿态不稳定,从而引起图像中的位置畸变。
因此,需要对图像进行姿态校正,使得图像中的每一个像素能够按照准确的空间位置进行定位。
姿态校正的主要方法包括使用姿态角信息进行校正、使用GPS/惯导等辅助信息进行姿态测量以及使用地面控制点进行姿态精确校正。
2. 像元定位:在遥感图像中,像元是指图像中的一个最小单元,通常对应于地面上的一个小区域。
在进行几何校正时,需要将图像中的像元与地球表面上的实际位置进行对应,这就需要确定每个像元的准确位置,即像元的定位。
像元定位的主要方法包括使用地面控制点进行像元定位、通过建立像元坐标系系统进行像元定位以及通过地形起伏对像元进行补偿。
3. 系统误差校正:在遥感图像获取过程中,会受到一些系统误差的影响,例如大气、地形或者地面表面的变化等因素会导致图像中的位置畸变。
因此,需要进行系统误差校正,以消除这些系统误差对图像的影响,从而提高图像的精度和准确度。
系统误差校正的主要方法包括对图像进行大气校正、进行地形效应校正以及通过地面控制点进行系统误差校正。
4. 投影变换:在进行几何校正时,需要对图像进行投影变换,将其投影到地球表面上的准确位置。
投影变换的最常用方法是采用地图投影方法,将图像投影到地图数据的坐标系上,从而实现图像与地图数据的叠加和精确对应。
遥感图像的几何校正

5.采集地面检查点(Ground Check Point)
以上采集的 GCP的类型均为控制点,用于控制计算,建立转换模型 及多项式方程。下面所要采集的GCP类型是检查点
6.计算转换模型(Compute Transformation)
在控制点采集过程中,一般是设置为自动转换计算模型。所以随着 控制点采集过程的完成,转换模型就自动计算生成。
在Set Geo-Correction Input File对话框中,需要确定校正图像, 有两种选择情况:
其一:首先确定来自视窗(From Viewer),然后选择显示图像视 窗。
其二:首先确定来自文件(From Image File),然后选择输入图 像。
三、遥感图像几何校正的途径
1.显示图像文件(Display Image Files)
4.采集地面控制点(Ground Control Point)
GCP的具体采集过程: 在图像几何校正过程中,采集控制点是一项非常重要和繁重的工 作,具体过程如下: (1)在GCP工具对话框中,点击Select GCP图表,进入GCP选 择状态; (2)在GCP数据表中,将输入GCP的颜色设置为比较明显的黄色。 (3)在Viewer1中移动关联方框位置,寻找明显的地物特征点, 作为输入GCP。 ( 4 ) 在 GCP 工 具 对 话 框 中 , 点 击 Create GCP 图 标 , 并 在 Viewer3中点击左键定点,GCP数据表将记录一个输入GCP,包括其 编号、标识码、X坐标和Y坐标。
2.启动几何校正模块(Geometric Correction Tool)
(1)Viewer1菜单条:Raster→ Geometric Correction→打 开Set Geometric Model对话框
第四章 遥感图像处理――几何校正PPT课件
三种内插方法比较
方法 1
优点 简单易用,计算量小
缺点
处理后的影像亮度具有不连 续性,影响精确度
精度明显提高,特别是对亮度 计算量增加,且对影像起到
2
不连续现象或线状特征的块状 平滑作用,从而使对比度明
化现象有明显的改善。
显的分界线变得模糊。
3
更好的影像质量,细节表现更 为清楚。
工作量很大。
23
18
像元灰度值重采样
校正前后图像的分辨率变化、像元点位置相对变化引 起输出图像阵列中的同名点灰度值变化。
x X
P(X,Y) Y
纠正后影像
p(x,y) y
纠正前影像
19
最近邻法
—以距内插点最近的观测点的像元值为所求的像元值。
影像中两相邻点的距离为1,即 行间距△x=1,列间距△y=1,取与 所计算点(x,y)周围相邻的4个点,比 较它们与被计算点的距离,哪个点距 离最近,就取哪个的亮度值作为 (x,y)点的亮度值f(x,y)。设该 最近邻点的坐标为(k,l),则
一是指平台在运行过程中,由于姿态、地球曲 率、地形起伏、地球旋转、大气折射、以及传 感器自身性能所引起的几何位置偏差。
二是指图像上像元的坐标与地图坐标系统中相 应坐标之间的差异。
3
引起遥感图像几何变形的因素
一、遥感平台位置和运动状态变化的影响
旁向位移的影响 速度变化即航向位移的影响
高度变化的影响—地面分辨率不均匀 俯仰变化的影响
21
三次卷积内插法
取与计算点(x,y)周 围 相 邻 的 16 个 点 , 与 双 向 线 性内插类似,可先在某一方 向上内插,每4个值依次内插 4次,求出f(x,j-1),f(x, j ) , f(x,j+1) , f(x,j+2) , 再根据这四个计算结果在另 一 方 向 上 内 插 , 得 到 f(x , y)。
遥感图像几何校正(较易)
遥感图像几何校正(较易)遥感图像几何校正是将采集的遥感图像与地球参考系统(如地理坐标系统或投影坐标系统)进行对齐,以保证图像上的地物位置与实际地理位置一致。
下面是一个较易的遥感图像几何校正步骤示例:1. 获取控制点:首先选择一些在图像上可见且在地面上已知坐标的控制点。
这些控制点可以是人工设置的地物特征,如标志物、房屋角点等,也可以是已知坐标的地理要素,如GPS测点、地面地物等。
2. 图像配准:通过图像配准软件,在原始图像上标记出控制点的位置,并将其与其在地面上的真实坐标相匹配。
配准软件会根据这些控制点来计算出图像的几何变换参数,如旋转、平移和缩放等。
13. 几何变换:根据图像的几何变换参数,对整个图像进行几何校正。
几何变换方法可以是线性的或非线性的,其中包括了常用的平移、旋转、缩放和仿射变换等。
4. 像素重采样:在完成几何校正后,由于图像上的像素点分辨率可能与原始图像不同,因此需要对图像进行重采样,以保证图像的细节精度和质量。
重采样方法有最邻近插值、双线性插值和双三次插值等,根据实际情况选择合适的方法。
5. 边缘裁剪:在完成像素重采样后,由于几何校正和重采样的处理可能会导致图像边缘的变形,需要对图像进行边缘裁剪,以去除边缘的不确定区域。
6. 输出校正后的图像:完成校正后的图像即可输出,用于后续的遥感分析和应用。
2需要注意的是,以上是一个较为简单的遥感图像几何校正流程,具体步骤和方法会因不同的图像类型、几何变换需求和软件工具的选择而有所不同。
在实际应用中,还需要考虑更多因素,如地面控制点的选择和精度要求、辅助数据的使用等。
3。
ENVI遥感图像的几何校正
遥感图像的几何校正(配准)1.实验目的与任务:(1)理解几何校正的原理;(2)学习使用 ENVI 软件进行几何校正;2.实验设备与数据:设备:遥感图像解决系统 ENVI数据:TM 数据3几何校正的过程:注意:几何校正一种是影像对影像,一种是影像对地图,下面介绍的是影像对影像的配准或几何校正。
1.打开参考影像(base)和待校正影像:分别打开,即在display#1,display#2 中打开;2.在主菜单上选择map->Registration->select GCPs:image to image3 .出现窗口Image to Image Registration,分别在两边选中DISPLAY 1(左),和DISPLAY 2(右)。
BASE 图像指参考图像而warp 则指待校正影像。
选择OK!4.现在就能够加点了:将两边的影像十字线焦点对准到自己认为是同一地物的地方,就能够选择ADD POINT 添加点了。
(PS:看不清出别忘记放大)如果要放弃该点选择右下脚的delete last point,或者点show point 弹出image to image gcp list 窗口,从中选择你要删除的点,也能够进行其它诸多操作,自己慢慢研究,呵呵。
选好4 个点后就能够预测:把十字叉放在参考影像某个地物,点选predict 则待校正影像就会自动跳转到与参考影像相对应的位置,而后再进行合适的调节并选点。
5.选点结束后,首先把点保存了:ground control points->file->save gcp as ASCII..固然你没有选完点也能够保存,下次就直接启用就能够:ground control points->file->restore gcps from ASCII...6.接下来就是进行校正了:在ground control points.对话框中选择:options->warp file(as image to map)在出现的imput warp image 中选中你要校正的影像,点ok 进入registration parameters对话框:首先点change proj 按钮,选择坐标系然后更改象素的大小,如果本身就是你所需要大小则不用改了最后选择重采样办法(resampling),普通都是选择双线性的(bilinear),最后的最后选择保存途径就OK 了遥感图像的监督分类1 实验的目的和任务1)理解遥感图像计算机分类的原理和办法;2)掌握监督分类的环节和办法。
如何进行遥感图像的几何校正与纠正
如何进行遥感图像的几何校正与纠正遥感图像是通过无人机、卫星等远距离设备获取的地球表面的影像数据。
这些图像在应用于地理信息系统(GIS)、自然资源管理、城市规划等领域时,需要进行几何校正与纠正。
本文将介绍什么是遥感图像的几何校正与纠正,以及如何进行这一过程。
一、什么是遥感图像的几何校正与纠正遥感图像的几何校正与纠正是指将采集到的图像数据与真实地理空间进行对应,消除由于图像采集时摄像设备、地球曲率等因素引起的形变、偏移等问题,使图像具备准确的地理位置信息。
这项工作是遥感技术应用的重要环节,对于后续的数据分析和信息提取至关重要。
二、遥感图像的几何校正与纠正方法1. 外方位元素法外方位元素法是利用航片或图像外方位元素(像空间坐标与地面坐标之间的变换参数)进行几何校正与纠正的方法。
在这种方法中,需要准确确定图像的摄影中心、摄影距离以及摄影方位角等相关参数,通过计算来修正图像的几何形变。
外方位元素法准确性较高,适用于相对高精度的项目。
2. 控制点法控制点法是通过在图像上选择一系列已知地理位置的控制点,在地面实地测量其坐标,然后通过像点与地理坐标的对应关系,进行几何校正与纠正的方法。
该方法的关键在于控制点的选择与测量精度,控制点越多、分布更均匀,纠正效果越好。
3. 数字高程模型(DEM)法数字高程模型法是通过使用数字高程模型数据,将遥感图像与地面实际高程进行对照校正的方法。
通过图像与DEM之间的高差计算,对图像进行几何校正与纠正。
这种方法适用于大范围的地形起伏、高程变化较大的区域。
三、遥感图像的几何校正与纠正注意事项1. 数据预处理在进行几何校正与纠正之前,需要对采集到的遥感图像进行预处理。
预处理包括影像增强、去噪、边缘检测等步骤,以提高图像质量和准确性。
2. 参考数据选择在进行校正与纠正时,需要选择适当的参考数据,以确保纠正结果的准确性。
参考数据可以包括航片、已经准确校正的图像、已知地理坐标点等。
3. 校正模型选择校正模型选择是几何校正与纠正的关键步骤之一。
遥感图像影像几何校正方法与精度评价

遥感图像影像几何校正方法与精度评价遥感技术是一种通过航空器或卫星获取地球表面信息的技术手段。
为了获得准确的地理空间信息,遥感图像需要经过几何校正。
本文将介绍几种常用的遥感图像影像几何校正方法,并探讨它们的精度评价。
一、几何校正方法1. 多点校正法多点校正法是一种常用的几何校正方法。
它通过在图像中选择多个控制点,然后根据这些控制点在现实地面上的坐标,使用几何变换公式进行图像的几何校正。
这种方法简单易行,适用于中等分辨率的图像。
2. 数字高程模型校正法数字高程模型校正法是一种基于数字高程模型的几何校正方法。
首先,通过获取地面的数字高程模型,然后将图像与数字高程模型进行配准,最后进行几何校正。
这种方法的优点是精度较高,适用于高分辨率的图像。
3. 惯导校正法惯导校正法是一种利用航空器或卫星的惯性导航系统进行几何校正的方法。
惯性导航系统可以测量航空器或卫星的姿态和位置信息,根据这些信息对图像进行几何校正。
这种方法的精度较高,适用于航空器或卫星上配备有惯性导航系统的情况。
二、精度评价几何校正的精度评价是衡量几何校正过程中误差大小的方法。
常用的评价指标有均方根误差(RMSE)和控制点定位精度。
1. 均方根误差(RMSE)均方根误差是通过对校正前后的像素位置误差进行统计分析得到的一个指标。
它是校正后图像中所有像素位置误差的平方和的开方。
均方根误差越小,表示几何校正的精度越高。
2. 控制点定位精度控制点定位精度是通过选取一组已知坐标的控制点,然后对校正后图像中的相应像素进行位置测量,计算其与控制点的位置误差。
控制点定位精度越小,表示几何校正的精度越高。
三、案例分析以一幅航拍图像为例,使用多点校正法、数字高程模型校正法和惯导校正法进行几何校正,并对校正后的图像进行精度评价。
多点校正法得到的校正图像的RMSE为0.5个像素,控制点定位精度为2米。
数字高程模型校正法得到的校正图像的RMSE为0.2个像素,控制点定位精度为0.5米。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
分辨率:采用线对/毫米
f
Rg
Rs f H
Rg 为地面分辨率
H
H 为航高
Rs 为系统分辨率 f 为摄影机焦距
IKONOS 图像,1m分辨率
由于地形起伏 引起的平面上 的点位在相片 位置上的移动, 这种现象称为 像点位移,其 位移量就是中 心投影与垂直 投影在同一水 平面上的“投 影误差”
9个一定 高度的柱 子,影像 中பைடு நூலகம்正射 投影,只 能看到顶; 其余成像 后放射状 的向外倒
影像面扫描的方式
➢不直接对地面扫描,而是先用光学系统将目标 的辐射信息在靶面上聚焦形成一幅影像,然后 对靶面扫描来获得数据
➢如SPOT卫星上的HRV
成像方式
➢成像方式的传感器把地物的电磁波能量强度用 图像的形式表示
➢航空摄影机、扫描仪、成像光谱仪和成像雷达 等
非成像方式
➢非成像方式的传感器把所探测到的地物电磁波 能量强度用数字或曲线图形表示
分辨率与比例尺 地形起伏引起的投影差 成像方式引起的变形 外方位元素 代表传感器 不足
中心投影类型成 像仪,通常称框 幅式成像仪
在成像瞬间直接 获取地面景物的 二维影像
特点:整幅影像 的所有像元是同 时成像的,图像 上所有像元的外 方位元素是一样 的
比例尺:1/m=f/H
(焦距/航高)
斜距投影成像仪: 侧视雷达等
大部分航天遥感采用扫描成像 两种扫描方式 1. 光/机扫描成像或掸扫式 2. 推扫式扫描或推帚式扫描 逐点或者逐列对地面作垂直飞行方向扫描
成像,随平台向前运动获得地面景物的二 维影像
扫描成像是依靠探测元件和扫描镜对目标 地物以瞬时视场为单位进行的逐点、逐行 取样,以取得目标地物电磁辐射特性信息, 形成一定谱段的图像
➢通过扫描镜的旋转 获取一条线影像
➢随着平台向前飞行, 获取第一条、第二 条、第n条线影像
每一点的外方位元 素都不同
分辨率a与瞬时视场β和航高H有关。瞬时视场β与 光学系统的焦距f和探测器尺寸d相关。一般,焦
距f和探测器尺寸d是确定的,那么分辨率a就直接
与航高H有关
扫描仪垂直指向地面的空间分辨率a
传统光学胶片感光范围比较窄,只有可见 光和近红外的一点
➢黑白胶片 ➢红外胶片 ➢彩色胶片 ➢彩色红外胶片
代表性传感器:框幅式航空摄影机
遥感 传感 器的 几何 投影 方式
(单)中心投影类型:分幅式摄影机、面阵 列CCD传感器
掸扫式(逐点):光/机 扫描成像
多中心投影类型
推扫式(逐线) :固体 自扫描成像、狭缝式摄 影机
雷达成像
逐点扫描:光/机扫描成像
逐行扫描(推扫式):固 体自扫描成像 面扫描:面阵列CCD传感器
➢航空摄影机:是空中对地面拍摄像片的仪器, 它通过光学系统采用胶片或磁带记录地物的反 射光谱能量
➢记录的波长范围以可见光~近红外为主
摄影方式传感器按感光胶片的性 质又可分为: ➢黑白 ➢天然彩色 ➢彩红外 ➢多波段摄影等
瞬时视场角FOV:扫描镜 在一瞬时时间可以视为静 止状态,此时,接受到的 目标地物的电磁波辐射, 限制在一个很小的角度之 内,这个角度被称为瞬时 视场角
瞬时视场IFOV:探测系统 在某一个瞬间地面的能探 测到的地面范围,即扫描 仪的空间分辨率
不是瞬间获取整幅 图像
➢逐点扫描,一个一 个像元获取
➢如辐射计、红外辐射计、微波辐射计、微波高 度计等
遥感 传感 器的 几何 投影 方式
中心投影类型:分幅式摄影机、面阵列 CCD传感器
掸扫式(逐点):光/机
扫描成像、镜头转动式 摄影机
多中心投影类型
推扫式(逐线) :固体 自扫描成像、狭缝式摄 影机
斜距投影成像仪: 侧视雷达等
不同类型成像传感器,其成像原理和投影方式也不同
航空像片
红外扫描像片
左图是中心投影方式得到的(比例尺基本一致、投影差呈放 射状);右边是逐点扫描成像得到的影像。横轴是飞行方向, 纵轴是扫描方向。
在星下点的扫描线,分辨率最高,两边都在对称的发生变化 直线在逐点扫描成像图中,变成曲线;圆形变成了椭圆形
光/机扫描仪主要有红外扫描仪和多光谱扫 描仪
任课教师:杨晓霞 2015年10月
沉积物和地层呈 现出美轮美奂的 颜色
伊朗的卡维尔盐 漠——盐质荒漠
遥感成像原理与影像特性 几何变形 基于共线方程的几何校正 基于多项式模型的几何校正
➢多项式校正模型 ➢地面控制点(GDP)的选取 ➢重采样方法
收集器
探测器
处理器
输出器
摄影方式传感器
扫描方式的传感器逐点逐行地收集信息 各点的信息按一定顺序先后进入传感器,
经一段时间后才能收集完一幅图像的全部 信息
按照成像方式又可以分为两种: ➢目标面扫描 ➢影像面扫描
目标面扫描的方式
➢直接对目标面(一般是地面)扫描,一点一行 顺序收集目标面上各单元的信息,然后拼成一 幅图像
➢如Landsat卫星上的MSS、TM等
➢如摄影相机和多光谱扫描仪等
主动式传感器
➢主动式传感器本身向目标发射电磁波,然后收集从目标 反射回来的电磁波信息
➢如合成孔径雷达等
按照成像方式又可以分为两种: ➢扫描方式 ➢非扫描方式
遥感 传感 器的 成像 原理
摄影成像(小孔成像原理):分幅式摄影机
扫描成像(依 靠探测元件对 目标地物以瞬 时视场为单位 进行取样)
aH d H
f
当观测视线倾斜时,即在不等于0的扫描角θ下观 测时,其地面分辨率发生变化,平行于航线方向
为a θ,垂直于航线方向为a θ’
a
H
H cos
a sec
a a sec a sec2
全景畸变的原因是焦距是不变的, 物距在发生变化。导致分辨率发生 变化,也导致比例尺发生变化
上页的分辨率公式是垂直的时候得 到的,如果倾斜了θ角之后,地面 分辨率的值发生变化。随着扫描镜 的转动,地面扫描范围的直径在发 生变化,这样的变化对图像是有影 响的,称为全景畸变
航空摄影机 的透镜
扫描仪的反 射镜
扫描方式传感器
摄影感光胶片
光电管、光电 倍增管、光电 二极管等光敏 探测元件
胶片的显影 及定影
电信号的放 大处理、滤 波、调制、 变换等
摄影胶片
磁带记录仪、 扫描晒像仪 等
被动式传感器
➢被动式传感器收集的是地物目标反射来自太阳光的能量 或地物本身辐射的电磁波能量