经典的两个物理建模方法
物理建模知识点总结

物理建模知识点总结一、物理建模的基本理论1. 物理建模的基本概念物理建模是指把物理系统的原理、规律和特性抽象化和理论化,形成一个用于研究、分析和预测的数学模型。
物理建模是物理学理论的应用,是通过建立模型的方式对物理现象进行研究和解释。
2. 物理建模的基本原理物理建模的基本原理是按照物理规律和原理,把物理系统的特性和行为通过数学模型的方式描述出来,以便对系统进行分析和预测。
物理建模的基本原理包括物理规律的抽象化和理论化,模型的数学表达和计算,以及对模型的验证和应用等。
3. 物理建模的基本要求物理建模的基本要求是建立合理、精确、有效的数学模型,并进行适当的验证和应用。
物理建模要求建立模型的过程中,要充分考虑物理系统的特性和行为,严格把握模型的假设和适用条件,确保模型的理论和实际有效性。
二、物理建模的常用方法1. 物理建模的数学方法物理建模的数学方法包括微分方程、积分方程、差分方程、矩阵方法等。
这些方法是建立物理系统的动力学模型和稳态模型的基本数学工具,用于描述系统的运动规律和稳定状态,并进行数学分析和计算。
2. 物理建模的实验方法物理建模的实验方法包括实验设计、数据采集和实验分析等。
这些方法是通过实验进行现象观测和数据收集,验证已有模型或者建立新的模型,对模型进行修正和改进,以及预测和设计系统的性能和行为。
3. 物理建模的仿真方法物理建模的仿真方法包括计算机模拟、数值计算和虚拟实验等。
这些方法是通过计算机对物理系统的数学模型进行模拟和计算,得到系统的性能和行为,进行对比和分析,以及预测和设计系统的性能和行为。
三、物理建模的应用领域1. 物理建模在物理学中的应用物理建模在物理学中的应用包括粒子物理、固体物理、等离子体物理、凝聚态物理等各个领域。
物理建模通过建立各种物理系统的数学模型,揭示系统的规律和特性,进行理论研究和实验预测,是推动物理科学发展的基础。
2. 物理建模在工程技术中的应用物理建模在工程技术中的应用包括机械工程、电气工程、化学工程、环境工程等各个领域。
高考物理建模型之活结和死结模型

高考物理建模型之活结和死结模型"活结"和"死结"模型是高考物理建模中经常考查的两种模型,易混淆,涉及高中物理方法较多,包括受力分析、合成法或正交分析法等知识。
考查方式灵活多样性,但共性基本利用的是共点力平衡知识进行处理,以达到解题目的。
下面就这种模型做详细区分及处理原则。
何为"活结"、"死结"1."活结"对象往往是绳子与光滑滑轮、绳子与光滑挂钩、绳子与光滑钉子组合一条绳子跨过(绕过)光滑的滑轮,看似两条绳子,实则是同一条绳子。
绳子可以沿滑轮移动,因"活结"而弯曲,因此这条绳子可以理解为两条绳子。
在受力上,这两条绳子的拉力必定大小相等,两条绳子拉力的合力必定在两条绳子所夹角的角平分线上。
如下图所示:解析:C处即为活结,对C点分析受力分别为:FAC、FCD和FC,其中FAC=FCD=Mg。
FC在∠ACD 的角平分线上,即FC是FAC与FCD的合力。
疑问:为什么FC的方向不沿BC杆方向呢?解析:这里还涉及轻杆模型(BC杆),这种杆的特点还在于末端(B端)是否与墙体固定有关系。
如果B端固定在墙内(如上图),则C端受到轻杆的弹力方向具有不确定性,不一定沿BC杆方向,具体的方向应该是与FAC与FCD的合力等值、反向、共线。
2."死结"对象往往是绳子打"结"后系在某点显然这是两条或多条绳子打"结"后系在一起,这不是同一条绳子,并且是"死结",不可以移动。
因此"死结"绳子的拉力大小不一定相等。
如下图所示:解析:在C点就是一个"死结",同样对C点受力分别为:FAC、FCD和FC,而FAC≠FCD,但FCD=Mg,而FC也不再是∠ACD的角平分线上,但是FC依然与FAC和FCD的合力等值、反向、共线(共点力平衡原理)。
高中物理24个经典模型
高中物理24个经典模型高中物理中有许多经典的模型,这些模型帮助我们理解物理世界的运作原理。
本文将介绍高中物理中的24个经典模型,让我们一起来了解它们吧!1.单摆模型:单摆模型用来研究摆动的物体的运动规律。
它包括一个质点和一个细线,可以通过改变细线长度或质点的质量来研究摆动的周期和频率。
2.平抛运动模型:平抛运动模型用来研究水平投掷物体的运动轨迹和速度。
它假设没有空气阻力,只有重力作用。
可以通过改变初速度和仰角来研究物体的落点和飞行距离。
3.牛顿第一定律模型:牛顿第一定律模型认为在没有外力作用下物体将保持匀速直线运动或静止。
这个模型帮助我们理解惯性的概念和物体运动状态的变化。
4.牛顿第二定律模型:牛顿第二定律模型描述了物体受力和加速度之间的关系。
它的数学表达式为F=ma,其中F表示物体受力,m表示物体质量,a表示物体加速度。
5.牛顿第三定律模型:牛顿第三定律模型表明对于每个作用力都存在一个等大反向的相互作用力。
这个模型帮助我们理解力的概念和物体之间的相互作用。
6.阻力模型:阻力模型用来研究运动物体与介质之间的相互作用。
它的大小与速度和物体形状有关,在物体运动时会减小其速度。
7.功率模型:功率模型描述了物体转化能量的速度和效率。
它等于功的大小除以时间,可以帮助我们理解物体能量的转变和利用。
8.热传导模型:热传导模型描述了热量在物体间传递的过程。
它通过研究热导率和温度差来解释热量传递的速率和方向。
9.摩擦力模型:摩擦力模型用来描述物体在接触面上滑动或滚动时的相互作用。
它的大小与物体之间的粗糙程度和压力有关,可以通过摩擦力模型来研究物体的运动和停止。
10.力矩模型:力矩模型用来研究物体旋转的平衡和加速度。
它的数学表达式为M=rF,其中M表示力矩,r表示力臂,F表示作用力。
11.浮力模型:浮力模型用来研究物体在液体或气体中的浮力。
它的大小等于液体或气体对物体的推力,可以帮助我们理解物体在液体中的浮沉和船只的浮力原理。
物理建模系列(九) 用能量守恒定律处理两种模型
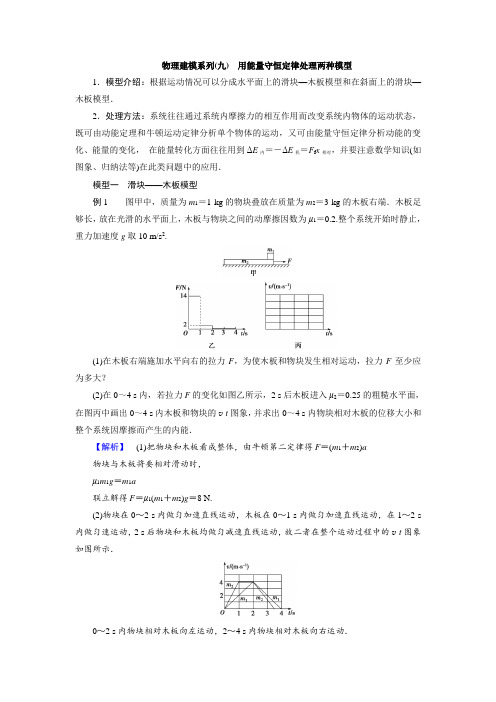
物理建模系列(九)用能量守恒定律处理两种模型1.模型介绍:根据运动情况可以分成水平面上的滑块—木板模型和在斜面上的滑块—木板模型.2.处理方法:系统往往通过系统内摩擦力的相互作用而改变系统内物体的运动状态,既可由动能定理和牛顿运动定律分析单个物体的运动,又可由能量守恒定律分析动能的变化、能量的变化,在能量转化方面往往用到ΔE内=-ΔE机=F f x相对,并要注意数学知识(如图象、归纳法等)在此类问题中的应用.模型一滑块——木板模型例1图甲中,质量为m1=1 kg的物块叠放在质量为m2=3 kg的木板右端.木板足够长,放在光滑的水平面上,木板与物块之间的动摩擦因数为μ1=0.2.整个系统开始时静止,重力加速度g取10 m/s2.(1)在木板右端施加水平向右的拉力F,为使木板和物块发生相对运动,拉力F至少应为多大?(2)在0~4 s内,若拉力F的变化如图乙所示,2 s后木板进入μ2=0.25的粗糙水平面,在图丙中画出0~4 s内木板和物块的v-t图象,并求出0~4 s内物块相对木板的位移大小和整个系统因摩擦而产生的内能.【解析】(1)把物块和木板看成整体,由牛顿第二定律得F=(m1+m2)a物块与木板将要相对滑动时,μ1m1g=m1a联立解得F=μ1(m1+m2)g=8 N.(2)物块在0~2 s内做匀加速直线运动,木板在0~1 s内做匀加速直线运动,在1~2 s 内做匀速运动,2 s后物块和木板均做匀减速直线运动,故二者在整个运动过程中的v-t图象如图所示.0~2 s内物块相对木板向左运动,2~4 s内物块相对木板向右运动.0~2 s 内物块相对木板的位移大小Δx 1=2 m ,系统摩擦产生的内能Q 1=μ1m 1g Δx 1=4 J.2~4 s 内物块相对木板的位移大小Δx 2=1 m ,物块与木板因摩擦产生的内能Q 2=μ1m 1g Δx 2=2 J ;木板对地位移x 2=3 m ,木板与地面因摩擦产生的内能Q 3=μ2(m 1+m 2)gx 2=30 J.0~4 s 内系统因摩擦产生的总内能为Q =Q 1+Q 2+Q 3=36 J.【答案】 (1)8 N (2)见解析滑块—木板模型问题的分析和技巧1.解题关键正确地对各物体进行受力分析(关键是确定物体间的摩擦力方向),并根据牛顿第二定律确定各物体的加速度,结合加速度和速度的方向关系确定物体的运动情况.2.规律选择既可由动能定理和牛顿运动定律分析单个物体的运动,又可由能量守恒定律分析动能的变化、能量的转化,在能量转化过程往往用到ΔE 内=-ΔE 机=F f x 相对,并要注意数学知识(如图象法、归纳法等)在此类问题中的应用.模型二 传送带模型例2 如图所示,传送带与水平面之间的夹角为θ=30°,其上A 、B 两点间的距离为l =5 m ,传送带在电动机的带动下以v =1 m/s 的速度匀速运动.现将一质量为m =10 kg 的小物体(可视为质点)轻放在传送带上的A 点,已知小物体与传送带之间的动摩擦因数μ=32,在传送带将小物体从A 点传送到B 点的过程中,求:(g 取10 m/s 2)(1)传送带对小物体做的功;(2)电动机做的功.【解析】 (1)小物体刚开始运动时,根据牛顿第二定律有μmg cos θ-mg sin θ=ma解得小物体上升的加速度为a =g 4=2.5 m/s 2 当小物体的速度为v =1 m/s 时,位移为x =v 22a=0.2 m然后小物体以v =1 m/s 的速度做匀速运动到达B 点.由功能关系得W =ΔE k +ΔE p =12m v 2+mgl sin θ=255 J. (2)电动机做功使小物体的机械能增加,同时小物体与传送带间因摩擦产生热量Q ,由v =at 得t =v a=0.4 s 相对位移x ′=v t -v 2t =0.2 m 摩擦产生的热量Q =μmgx ′cos θ=15 J故电动机做的功为W 电=W +Q =270 J.【答案】 (1)255 J (2)270 J传送带问题的分析流程和技巧1.分析流程2.相对位移一对相互作用的滑动摩擦力做功所产生的热量Q =F f ·x 相对,其中x 相对是物体间相对路径长度.如果两物体同向运动,x 相对为两物体对地位移大小之差;如果两物体反向运动,x 相对为两物体对地位移大小之和.3.功能关系(1)功能关系分析:W F =ΔE k +ΔE p +Q .(2)对W F 和Q 的理解:①传送带的功:W F =Fx 传;②产生的内能Q =F f x 相对.[高考真题]1.(2016·四川卷,1)韩晓鹏是我国首位在冬奥会雪上项目夺冠的运动员.他在一次自由式滑雪空中技巧比赛中沿“助滑区”保持同一姿态下滑了一段距离,重力对他做功 1 900 J ,他克服阻力做功100 J .韩晓鹏在此过程中( )A .动能增加了1 900 JB .动能增加了2 000 JC .重力势能减小了1 900 JD .重力势能减小了2 000 J【解析】 由动能定理可知,ΔE k =1 900 J -100 J =1 800 J ,故A 、B 均错.重力势能的减少量等于重力做的功,故C 正确、D 错.答案 C2.(2014·山东卷,20)2013年我国相继完成“神十”与“天宫”对接、“嫦娥”携“玉兔”落月两大航天工程.某航天爱好者提出“玉兔”回家的设想:如图,将携带“玉兔”的返回系统由月球表面发射到h 高度的轨道上,与在该轨道绕月球做圆周运动的飞船对接,然后由飞船送“玉兔”返回地球.设“玉兔”质量为m ,月球半径为R ,月面的重力加速度为g 月.以月面为零势能面,“玉兔”在h 高度的引力势能可表示为E p =GMmh R (R +h ),其中G 为引力常量,M 为月球质量.若忽略月球的自转,从开始发射到对接完成需要对“玉兔”做的功为( )A.mg 月R R +h(h +2R ) B .mg 月R R +h (h +2R ) C.mg 月R R +h (h +22R ) D .mg 月R R +h(h +12R ) 【解析】 设玉兔在h 高度的速度为v ,则由万有引力定律得,G Mm (R +h )2=m v 2R +h,可知玉兔在该轨道上的动能为E k =12GMm (R +h ),由功能关系可知对玉兔做的功为:W =E k +E p =12GMm (R +h )+GMmh R (R +h ),结合在月球表面:G Mm R 2=mg 月,整理可知W =mg 月R R +h(h +12R ),故正确选项为D.【答案】 D3.(2014·广东卷,16)如图所示是安装在列车车厢之间的摩擦缓冲器结构图,图中①和②为楔块,③和④为垫板, 楔块与弹簧盒、垫板间均有摩擦,在车厢相互撞击使弹簧压缩的过程中( )A .缓冲器的机械能守恒B .摩擦力做功消耗机械能C .垫板的动能全部转化为内能D .弹簧的弹性势能全部转化为动能【解析】 由于楔块与弹簧盒、垫板间有摩擦力,即摩擦力做负功,则机械能转化为内能,故A 错误,B 正确;垫板动能转化为内能和弹性势能,故C 错误;而弹簧弹性势能也转化为动能和内能,故D 错误.【答案】 B[名校模拟]4.(2018·宁夏银川一中模拟)如图所示,水平传送带两端点A 、B 间的距离为L ,传送带开始时处于静止状态.把一个小物体放到右端的A 点,某人用恒定的水平力F 使小物体以速度v 1匀速滑到左端的B 点,拉力F 所做的功为W 1、功率为P 1,这一过程物体和传送带之间因摩擦而产生的热量为Q 1.随后让传送带以v 2的速度逆时针匀速运动,此人仍然用相同的恒定的水平力F 拉物体,使它以相对传送带为v 1的速度匀速从A 滑行到B ,这一过程中,拉力F 所做的功为W 2、功率为P 2,物体和传送带之间因摩擦而产生的热量为Q 2.下列关系中正确的是( )A .W 1=W 2,P 1<P 2,Q 1=Q 2B .W 1=W 2,P 1<P 2,Q 1>Q 2C .W 1>W 2,P 1=P 2,Q 1>Q 2D .W 1>W 2,P 1=P 2,Q 1=Q 2【解析】 当传送带不运动时,拉力做功W 1=FL ,物体从A 运动到B 的时间t 1=L v 1,因摩擦而产生的热量Q 1=fL .当传送带运动时,拉力做功W 2=FL ,物体从A 运动到B 的时间t 2=L v 1+v 2<t 1,因摩擦而产生的热量Q 2=f v 1t 2.拉力做功功率P 1=W 1t 1,P 2=W 2t 2,比较可知W 1=W 2,P 1<P 2.又v 1t 2<v 1t 1,v 1t 1=L ,得Q 1>Q 2,故选B.【答案】 B5.(2018·山东临沂高三上学期期中)如图所示,一质量为m 的小球用两根不可伸长的轻绳a 、b 连接,两轻绳的另一端分别系在竖直杆的A 、B 两点上,当两轻绳伸直时,a 绳与杆的夹角为30°,b 绳水平,已知a 绳长为2L ,当竖直杆以自己为轴转动,角速度ω从零开始缓慢增大过程中,下列说法正确的是( )A .从开始至b 绳伸直但不提供拉力时,绳a 对小球做功为0B .b 绳伸直但不提供拉力时,小球的向心加速度大小为33gC .从开始至b 绳伸直但不提供拉力时,小球的机械能增加了⎝⎛⎭⎫2-536mgLD .当ω= g 3L时,b 绳未伸直 【解析】 细绳对球的拉力方向与球的位移方向不垂直,故一定对球做正功,使其机械能增大,A 错;ma =mg tan 30°,a =33g ,B 对;m v 2L =mg tan θ,E k =12m v 2=36mgL ,A 球ΔE =E k +E p =36mgL +mg (2L -3L )=⎝⎛⎭⎫2-536·mgL ,C 对;令mLω2=mg tan 30°,得ω=3g 3L,D 对. 【答案】 BCD6.(2018·江苏南通高三模拟)如图所示,将质量为2m 的重物悬挂在轻绳的一端,轻绳的另一端系一质量为m 的环,环套在竖直固定的光滑直杆上,光滑定滑轮与直杆的距离为d .现将环从与定滑轮等高的A 处由静止释放,当环沿直杆下滑距离也为d 时(图中B 处),下列说法正确的是(重力加速度为g )( )A .环刚释放时轻绳中的张力等于2mgB .环到达B 处时,重物上升的高度为(2-1)dC .环在B 处的速度与重物上升的速度大小之比为22D .环减少的机械能大于重物增加的机械能【解析】 环释放后重物加速上升,故绳中张力一定大于2mg ,A 项错误;环到达B处时,绳与直杆间的夹角为45°,重物上升的高度h=(2-1)d,B项正确;如图所示,将B处环速度v进行正交分解,重物上升的速度与其分速度v1大小相等,v1=v cos 45°=22 v,所以,环在B处的速度与重物上升的速度大小之比等于2,C项错误;环和重物组成的系统机械能守恒,故D项错误.【答案】 B课时作业(十七)[基础小题练]1.自然现象中蕴藏着许多物理知识,如图所示为一个盛水袋,某人从侧面缓慢推袋壁使它变形,则水的势能()A.变大B.变小C.不变D.不能确定【解析】人缓慢推水袋,对水袋做正功,由功能关系可知,水的重力势能一定增加,A正确.【答案】 A2.如图所示,A物体用板托着,细绳跨过轻质光滑定滑轮与A、B相连,绳处于绷直状态,已知A、B的质量分别为2m和m.现将板抽走,则A下落一段距离的过程中()A.A物体减少的机械能大于B物体增加的机械能B.A物体减少的机械能等于B物体增加的机械能C.悬挂滑轮的绳子对天花板的拉力大于3mgD.悬挂滑轮的绳子对天花板的拉力小于3mg【解析】对A、B组成的系统,没有机械能与其他形式能的转化,因此系统的机械能守恒,A物体减少的机械能等于B物体增加的机械能,A错误,B正确;对滑轮受力分析,根据平衡条件得F=2F T,对A、B整体受力分析,根据牛顿第二定律得2mg-mg=3ma,对B 物体受力分析得F T -mg =ma ,联立得F =83mg ,C 错误,D 正确. 【答案】 BD3.小车静止在光滑的水平导轨上,一个小球用细绳悬挂在车上由图中位置无初速度释放,在小球下摆到最低点的过程中,下列说法正确的是( )A .绳对球的拉力不做功B .球克服绳拉力做的功等于球减少的机械能C .绳对车做的功等于球减少的重力势能D .球减少的重力势能等于球增加的动能【解析】 小球下摆的过程中,小车的机械能增加,小球的机械能减少,球克服绳拉力做的功等于减少的机械能,选项A 错误,选项B 正确;绳对车做的功等于球减少的机械能,选项C 错误;球减少的重力势能等于球增加的动能和小车增加的机械能之和,选项D 错误.【答案】 B4.悬崖跳水是一项极具挑战性的极限运动,需要运动员具有非凡的胆量和过硬的技术.跳水运动员进入水中后受到水的阻力而做减速运动,设质量为m 的运动员刚入水时的速度为v ,水对他的阻力大小恒为F ,那么在他减速下降深度为h 的过程中,下列说法正确的是(g 为当地的重力加速度)( )A .他的动能减少了(F -mg )hB .他的重力势能减少了mgh -12m v 2 C .他的机械能减少了FhD .他的机械能减少了mgh【解析】 合力做的功等于动能的变化,合力做的功为(F -mg )h ,A 正确;重力做的功等于重力势能的减少量,故重力势能减小了mgh ,B 错误;重力以外的力做的功等于机械能的变化,故机械能减少了Fh ,C 正确,D 错误.【答案】 AC5.如图所示,在光滑斜面上的A 点先后水平抛出和静止释放两个质量相等的小球1和2,不计空气阻力,最终两小球在斜面上的B 点相遇,在这个过程中( )A .小球1重力做的功大于小球2重力做的功B .小球1机械能的变化大于小球2机械能的变化C .小球1到达B 点的动能大于小球2的动能D .两小球到达B 点时,在竖直方向的分速度相等【解析】 重力做功只与初、末位置的高度差有关,与物体经过的路径无关,所以重力对1、2两小球所做的功相等,A 错误;1、2两小球从A 点运动到B 点的过程中,只有重力对其做功,所以它们的机械能均守恒,B 错误;由动能定理可得,对小球1有:mgh =E k1-E k0,对小球2有:mgh =E k2-0,显然E k1>E k2,C 正确;由上面的分析可知,两小球到达B 点时,小球1的速度大于小球2的速度,且小球1的速度方向与竖直方向的夹角小于小球2速度方向与竖直方向的夹角,因此,小球1在竖直方向上的速度大于小球2在竖直方向上的速度,D 错误.【答案】 C6.如图所示,水平传送带AB 长为21 m ,以6 m/s 的速度顺时针匀速转动,台面与传送带平滑连接于B 点,半圆形光滑轨道半径R =1.25 m ,与水平台面相切于C 点,BC 长x =5.5 m ,P 点是圆弧轨道上与圆心O 等高的一点.一质量为m =1 kg 的物块(可视为质点),从A 点无初速度释放,物块与传送带及台面间的动摩擦因数均为0.1,则关于物块的运动情况,下列说法正确的是( )A .物块不能到达P 点B .物块能越过P 点做斜抛运动C .物块能越过P 点做平抛运动D .物块能到达P 点,但不会出现选项B 、C 所描述的运动情况【解析】 物块从A 点释放后在传送带上做加速运动,假设到达台面之前能够达到传送带的速度v ,则由动能定理得,μmgx 1=12m v 2,得x 1=18 m <21 m ,假设成立.物块以6 m/s 冲上台面,假设物块能到达P 点,则到达P 点时的动能E k P 可由动能定理求得,-μmgx -mgR =E k P -12m v 2,得E k P =0,可见,物块能到达P 点,速度恰为零,之后从P 点沿圆弧轨道滑回,不会出现选项B 、C 所描述的运动情况,D 正确.【答案】 D[创新导向练]7.生活娱乐——蹦床娱乐中的能量转化问题在儿童乐园的蹦床项目中,小孩在两根弹性绳和蹦床的协助下实现上下弹跳.如图所示,某次蹦床活动中小孩静止时处于O 点,当其弹跳到最高点A 后下落可将蹦床压到最低点B ,小孩可看成质点,不计空气阻力.下列说法正确的是( )A.从A运动到O,小孩重力势能减少量大于动能增加量B.从O运动到B,小孩动能减少量等于蹦床弹性势能增加量C.从A运动到B,小孩机械能减少量小于蹦床弹性势能增加量D.若从B返回到A,小孩机械能增加量等于蹦床弹性势能减少量【解析】从A运动到O点,小孩重力势能减少量等于动能增加量与弹性绳的弹性势能的增加量之和,选项A正确;从O运动到B,小孩动能和重力势能的减少量等于弹性绳和蹦床的弹性势能的增加量,选项B错误;从A运动到B,小孩机械能减少量大于蹦床弹性势能增加量,选项C错误;若从B返回到A,小孩机械能增加量等于蹦床和弹性绳弹性势能减少量之和,选项D错误.【答案】 A8.物理与生物——以“跳蚤”弹跳为背景考查能量问题在日常生活中,人们习惯于用几何相似性放大(或缩小)的倍数去得出推论,例如一个人身体高了50%,做衣服用的布料也要多50%,但实际上这种计算方法是错误的.若物体的几何线度为L,当L改变时,其他因素按怎样的规律变化?这类规律可称之为标度律,它们是由量纲关系决定的.在上例中,物体的表面积S=kL2,所以身高变为1.5倍,所用的布料变为1.52=2.25倍.以跳蚤为例:如果一只跳蚤的身长为2 mm,质量为0.2 g,往上跳的高度可达0.3 m.可假设其体内能用来跳高的能量E∝L3(L为几何线度),在其平均密度不变的情况下,身长变为2 m,则这只跳蚤往上跳的最大高度最接近()A.0.3 m B.3 mC.30 m D.300 m【解析】根据能量关系可知E=mgh,由题意可知E=kL3,则mgh=kL3;因跳蚤的平均密度不变,则m=ρL3,则ρgh=k,因ρ、g、k均为定值,故h不变,则这只跳蚤往上跳的最大高度最接近0.3 m,故选A.【答案】 A9.就地取材——利用“弹弓”考查功能关系问题弹弓是80后童年生活最喜爱的打击类玩具之一,其工作原理如图所示,橡皮筋两端点A、B固定在把手上,橡皮筋ABC恰好处于原长状态,在C处(AB连线的中垂线上)放一固体弹丸,一手执把,另一手将弹丸拉至D点放手,弹丸就会在橡皮筋的作用下迅速发射出去,打击目标,现将弹丸竖直向上发射,已知E 是CD 的中点,则( )A .从D 到C ,弹丸的动能一直在增大B .从D 到C 的过程中,弹丸在E 点的动能一定最大C .从D 到C ,弹丸的机械能先增大后减少D .从D 到E 弹丸增加的机械能大于从E 到C 弹丸增加的机械能【解析】 在CD 连线中的某一处,弹丸受力平衡,但是此点不一定是E 点,所以从D 到C ,弹丸的速度先增大后减小,弹丸的动能先增大后减小,故A 、B 错误;从D 到C ,橡皮筋对弹丸做正功,弹丸机械能一直在增加,故C 错误;从D 到E 橡皮筋作用在弹丸上的合力大于从E 到C 橡皮筋作用在弹丸上的合力,两段长度相等,所以DE 段橡皮筋对弹丸做功较多,即机械能增加的较多,故D 正确,故选D.【答案】 D10.综合应用——能量转化与守恒定律的实际应用如图所示,倾角θ=37°的光滑斜面上粘贴有一厚度不计、宽度为d =0.2 m 的橡胶带,橡胶带的上表面与斜面位于同一平面内,其上、下边缘与斜面的上、下边缘平行,橡胶带的上边缘到斜面的顶端距离为L =0.4 m ,现将质量为m =1 kg 、宽度为d 的薄矩形板上边缘与斜面顶端平齐且从斜面顶端静止释放.已知矩形板与橡胶带之间的动摩擦因数为0.5,重力加速度大小为g =10 m/s 2,不计空气阻力,矩形板由斜面顶端静止释放到完全离开橡胶带的过程中(此过程矩形板始终在斜面上),sin 37°=0.6,cos 37°=0.8,下列说法正确的是( )A .矩形板受到的摩擦力大小为4 NB .矩形板的重力做功为3.6 JC .产生的热量为0.8 JD .矩形板的上边缘穿过橡胶带下边缘时其速度大小为2355m/s 【解析】 当矩形板全部在橡胶带上时摩擦力为F f =μmg cos 37°=4 N ,此时摩擦力最大,其他情形摩擦力均小于4 N ,故A 错误;重力对矩形板做功W G =mgh =mg (L +d )sin 37°=3.6 J ,B 正确;从滑上橡胶带到完全离开橡胶带,因矩形板受到的摩擦力与位移的变化为线性关系,则产生的热量Q =0+μmg cos 37°2×2d =0.8 J ,C 正确;从释放到完全离开橡胶带,对矩形板由动能定理有mg (L +d )sin 37°-0+μmg cos 37°2×2d =12m v 2,代入可得v =2355m/s ,D 正确.【答案】 BCD[综合提升练]11.如图所示,A 、B 间是一个风洞,水平地板AB 延伸至C 点,通过半径r =0.5 m 、圆心角为θ的光滑圆弧CD 与足够长的光滑斜面DE 连接,斜面倾角为θ.可以看成质点、质量m =2 kg 的滑块在风洞中受到水平向右的恒定风力F =20 N ,滑块与地板AC 间的动摩擦因数μ=0.2.已知x AB =5 m ,x BC =2 m ,如果将滑块在风洞中A 点由静止释放,已知sin θ=0.6,cos θ=0.8,重力加速度g 取10 m/s 2.求(计算结果要求保留3位有效数字):(1)滑块经过圆弧轨道的C 点时对地板的压力大小及在斜面上上升的最大高度;(2)滑块第一次返回风洞速率为零时的位置;(3)滑块在A 、C 间运动的总路程.【解析】 (1)滑块在风洞中A 点由静止释放后,设经过C 点时速度为v 1,由动能定理得Fx AB -μmgx AC =12m v 21 在C 点由牛顿第二定律有F N C -mg =m v 21r代入数据解得F N C =308 N ,由牛顿第三定律知滑块经过C 点时对地板的压力为308 N 滑块由C 点上滑过程中,机械能守恒12m v 21=mgr (1-cos θ)+mgh 代入数据解得h =3.50 m.(2)滑块返回风洞时,风力与摩擦力皆为阻力,设滑块运动到P 点时速率为零,由能量守恒得12m v 21=μmg (x BC +x PB )+Fx PB代入数据解得x PB =83m ≈2.67 m 滑块第一次返回风洞速率为零时的位置在B 点左侧2.67 m 处.(3)整个过程等效为滑块从A 处在风力和滑动摩擦力的共同作用下被推到B 处,然后在足够长水平面上滑行至静止,设总路程为s ,由动能定理得Fx AB -μmgs =0代入数据解得s =25.0 m.【答案】 (1)308 N 3.50 m (2)在B 点左侧2.67 m 处 (3)25.0 m12.如图所示,在竖直方向上A 、B 两物体通过劲度系数为k =16 N/m 的轻质弹簧相连,A 放在水平地面上,B 、C 两物体通过细线绕过轻质定滑轮相连,C 放在倾角α=30°的固定光滑斜面上.用手拿住C ,使细线刚好拉直但无拉力作用,并保证ab 段的细线竖直、cd 段的细线与斜面平行.已知A 、B 的质量均为m =0.2 kg ,重力加速度取g =10 m/s 2,细线与滑轮之间的摩擦不计,开始时整个系统处于静止状态.释放C 后它沿斜面下滑,A 刚离开地面时,B 获得最大速度,求:(1)从释放C 到物体A 刚离开地面时,物体C 沿斜面下滑的距离;(2)物体C 的质量;(3)释放C 到A 刚离开地面的过程中细线的拉力对物体C 做的功.【解析】 (1)设开始时弹簧的压缩量为x B ,得kx B =mg ①设物体A 刚离开地面时,弹簧的伸长量为x A ,得kx A =mg ②当物体A 刚离开地面时,物体C 沿斜面下滑的距离为h =x A +x B ③由①②③解得h =2mg k=0.25 m .④ (2)物体A 刚离开地面时,物体B 获得最大速度v m ,加速度为零,设C 的质量为M ,对B 有F T -mg -kx A =0⑤对C 有Mg sin α-F T =0⑥由②⑤⑥解得M =4m =0.8 kg.(3)由于x A =x B ,物体B 开始运动到速度最大的过程中,弹簧弹力做功为零,且B 、C 两物体速度大小相等,由能量守恒有Mgh sin α-mgh =12(m +M )v 2m 解得v m =1 m/s对C 由动能定理可得Mgh sin α+W T =12M v 2m解得W T =-0.6 J.【答案】 (1)0.25 m (2)0.8 kg (3)-0.6 J。
高三物理常见模型与方法
高三物理常见模型与方法高三物理常见模型与方法如下:1. 质心模型:研究多种体育运动中的集中典型运动规律、力能角度。
2. 绳件、弹簧、杆件模型:研究三者在直线与圆周运动中的动力学问题和功能问题,以及异同点。
3. 挂件模型:解决平衡问题,包括死结与活结问题,并采用正交分解法、图解法、三角形法则和极值法等。
4. 追碰模型:研究运动规律、碰撞规律和临界问题,可采用数学法(函数极值法、图像法等)和物理方法(参照物变换法、守恒法)等。
5. 运动关联模型:研究一物体运动的同时性、独立性、等效性,以及多物体参与的独立性和时空联系。
6. 皮带模型:研究摩擦力、牛顿运动定律、功能及摩擦生热等问题。
7. 斜面模型:研究运动规律、三大定律和数理问题。
8. 平抛模型:研究运动的合成与分解、牛顿运动定律和动能定理(类平抛运动)。
9. 行星模型:研究向心力(各种力)、相关物理量、功能问题和数理问题(圆心、半径、临界问题)。
10. 全过程模型:研究匀变速运动的整体性、保守力与耗散力、动量守恒定律、动能定理和全过程整体法。
11. 人船模型:研究动量守恒定律、能量守恒定律和数理问题。
12. 子弹打木块模型:研究三大定律、摩擦生热、临界问题和数理问题。
13. 爆炸模型:研究动量守恒定律、能量守恒定律。
14. 单摆模型:研究简谐运动、圆周运动中的力和能问题,可采用对称法、图象法等。
15. 限流与分压器模型:研究电路设计、串并联电路规律及闭合电路的欧姆定律、电能、电功率和实际应用。
16. 电路的动态变化模型:研究闭合电路的欧姆定律、判断方法和变压器的三个制约问题。
17. 磁流发电机模型:研究平衡与偏转、力和能问题。
18. 回旋加速器模型:研究加速模型(力能规律)和回旋模型(圆周运动)及数理问题。
19. 对称模型:研究简谐运动(波动)、电场、磁场、光学问题中的对称性、多解性和对称性。
20. 电磁场中的单杆模型:处理角度为力电角度、电学角度和力能角度,涉及棒与电阻、棒与电容、棒与电感、棒与弹簧组合、平面导轨和竖直导轨等。
高二物理学习中的模型建立与应用

高二物理学习中的模型建立与应用物理学是一门以实验为基础的自然科学,通过建立数学模型来描述和解释现象,以推导出规律性的物理定律。
在高二物理学习中,模型的建立和应用是学习的核心内容之一。
本文将探讨高二物理学习中模型建立的方法和模型的应用。
一、模型建立的方法模型建立是物理学习中的基础工作,通过模型可以简化复杂的现象,使其更易于理解。
在高二物理学习中,模型建立的方法主要有以下几种。
1. 数学模型法:利用数学工具,通过建立数学方程或函数,将物理问题转化为数学问题进行求解。
例如,在分析物体的运动过程时,可以建立位移-时间、速度-时间、加速度-时间等数学模型,从而得到相关的物理量。
2. 物理模型法:通过物理实验或观察,寻找规律,并将其转化为物理模型。
例如,在研究物体的弹性变形时,可以将物体视为弹簧,建立弹簧模型来描述物体的弹性特性。
3. 概率模型法:在不确定性问题中,利用概率理论建立概率模型,对可能发生的情况进行预测和分析。
例如,在研究放射性衰变过程时,可以利用指数分布模型来描述放射性核素的衰变规律。
以上仅为模型建立的常见方法,实际应用中还可以根据具体问题选择合适的方法进行建模。
二、模型的应用模型的应用是物理学习中的关键环节,通过将模型应用于实际问题,可以得到有价值的结论和预测。
以下是高二物理学习中模型的一些常见应用。
1. 预测与解释:通过建立模型,可以预测物理现象的发生和结果。
例如,在学习力学中,可以通过模型分析物体的运动轨迹、受力情况等,从而预测物体的未来状态。
2. 优化设计:模型可以辅助工程和设计领域的优化。
例如,在学习光学时,可以通过光的折射和反射模型,优化设计光学仪器,提高光学系统的性能。
3. 问题求解:在物理学习中,模型经常用于解决实际问题。
例如,在学习电磁感应时,可以建立电磁感应模型,解决关于电磁感应的问题,如发电原理、感应电流大小等。
4. 理论验证:物理模型可以用于验证和修正已有理论。
例如,在学习粒子物理学时,可以利用标准模型验证新发现的粒子性质,从而扩展和完善现有的理论。
物理仿真软件的建模与模拟方法解析

物理仿真软件的建模与模拟方法解析物理仿真软件是利用计算机技术进行物理场景建模和模拟的工具。
它允许用户在虚拟环境中进行实验和观察物体的运动、相互作用和变化。
物理仿真软件的建模和模拟方法涉及多个方面,包括物体建模、力学模拟、碰撞检测、动画显示等。
物体建模是物理仿真软件的基础,它需要对物体的几何形状和物理属性进行建模。
常用的建模方法包括几何建模和物理建模。
几何建模是指对物体的外形进行建模,可以采用多边形网格或参数化曲线表示。
物理建模是指对物体的物理属性进行建模,包括质量、惯性、弹性等。
常用的物理建模方法有质点模型、质点弹簧系统和有限元方法。
质点模型是最简单的物体建模方法之一,它将物体看作一组质点,每个质点具有质量和位置。
质点之间可以通过弹簧连接,形成质点弹簧系统。
质点弹簧系统可以模拟物体的弹性行为,如弹簧的伸缩和弯曲。
但是质点模型忽略了物体的形状和体积,适用于模拟弹性体和液体。
有限元方法是一种更为精确的物体建模方法,它将物体划分为一组小的有限元素,并对每个元素进行建模。
每个元素具有质量、形状和应力状态。
有限元方法可以模拟物体的形变和应力分布,适用于模拟固体物体的变形和断裂。
力学模拟是物理仿真软件的核心,它根据物体的模型和外部作用力计算物体的运动和变形。
力学模拟可以分为两类:静力学模拟和动力学模拟。
静力学模拟是指在物体处于静止状态下计算物体的平衡位置。
动力学模拟是指在物体受外部作用力作用下计算物体的运动轨迹。
静力学模拟的方法包括约束求解和力平衡求解。
约束求解是通过施加约束条件使得物体达到平衡。
常用的约束条件包括物体的固定点、刚体约束和弹簧约束。
力平衡求解是通过平衡物体受力和力矩的求和为零来求解物体的平衡位置。
动力学模拟的方法包括牛顿运动定律和欧拉方程。
牛顿运动定律可以描述物体的动力学行为,根据物体受到的作用力和物体的质量计算物体的加速度和速度。
欧拉方程是牛顿运动定律的数值求解方法,将动力学问题离散化为一系列时间步长的计算。
物理模型归纳总结

物理模型归纳总结物理学是一门研究物质、能量和它们之间相互作用的科学。
通过构建物理模型,我们可以更好地理解自然界中的现象和规律。
本文将归纳总结几种常见的物理模型,以帮助读者更好地理解物理学的基本原理。
第一种物理模型:质点模型质点模型是最简单的物理模型之一,它假设物体可以被视为没有大小和形状的点。
在这个模型中,物体的质量集中在一个点上,忽略了物体内部的细节结构。
质点模型通常适用于分析质量分布均匀且作用力作用点非常接近的物体,例如,对于天体力学中的行星运动。
第二种物理模型:刚体模型刚体模型假设物体内部的各个分子之间相互保持一定的相对位置不变,且不会发生形变。
在这个模型中,物体被视为一个整体,通常会考虑物体的重心和转动惯量等性质。
刚体模型适用于分析刚性物体在旋转、碰撞等过程中的运动和相互作用。
第三种物理模型:弹簧模型弹簧模型是研究弹性形变和弹性力的重要工具。
它假设物体可以被视为由无数个弹簧组成的弹性体,当物体受到外力作用时,弹簧会发生形变并产生弹性力。
弹簧模型适用于分析弹性体的形变和恢复过程,例如,弹簧的拉伸和压缩等现象。
第四种物理模型:流体模型流体模型是研究流体力学的基础。
它假设流体是连续且没有内部结构的,可以通过密度、压强、速度等参数来描述。
流体模型适用于分析流体的运动、静力学和动力学等问题,例如,液体的压强和气体的流动。
第五种物理模型:电路模型电路模型是研究电学的基础。
它将电器元件和电源连接起来,通过电流、电压等参数来描述电路中的物理量。
电路模型适用于分析电路中的电流分布、电压降和电阻等性质,例如,直流电路和交流电路的分析。
第六种物理模型:波动模型波动模型是研究波动现象的基础。
它将波动传播过程中的振幅、波长、频率等参数进行数学描述。
波动模型适用于分析机械波和电磁波的传播和干涉等现象,例如,音波的传播和光的衍射等。
总结:物理学中的物理模型为我们理解自然界提供了有力的工具。
通过质点模型、刚体模型、弹簧模型、流体模型、电路模型和波动模型等,可以更准确地描述和预测物理系统的行为。
构建模型解析问题学习物理的模型建立方法

构建模型解析问题学习物理的模型建立方法物理学是一门研究物质运动和相互作用的学科,它的核心在于建立和运用模型来解析和解释现象。
构建合适的模型是学习物理的关键之一,本文将介绍一些常用的模型建立方法。
一、假设和简化在构建物理模型时,我们通常需要进行合理的假设和简化。
考虑到模型要抓住问题的关键点,我们可以假设某些因素不影响结果,或者简化复杂的现象为简单的模型。
例如,在研究物体的自由落体运动时,可以假设忽略空气阻力的影响,从而简化计算。
二、可视化可视化是一种常用的模型建立方法,它通过图形化呈现物理现象和变量的关系,帮助我们更好地理解和分析问题。
例如,在研究力和运动的关系时,我们可以通过绘制力与加速度的图像来观察它们之间的规律。
三、数学建模物理学与数学密不可分,数学建模是构建物理模型的重要方法之一。
利用数学工具,我们可以将物理问题转化为方程或者函数的形式,从而进行定量化的分析和预测。
例如,在研究简谐振动时,可以利用振幅、角频率和时间的数学表达式来描述振动的运动规律。
四、实验模拟实验模拟是一种通过实验设备和计算机模拟来构建模型的方法。
它可以模拟真实的物理环境和相互作用,提供一个可控的实验平台。
通过实验模拟,我们可以观察和分析物理现象,并验证模型的准确性。
例如,在研究行星运动轨迹时,可以使用计算机模拟的方法,模拟行星在引力作用下的运动轨迹。
五、多学科交叉物理学的建模方法常常涉及到多个学科的知识和理论。
通过与其他学科的交叉融合,我们可以借鉴其他学科的模型建立方法,为物理问题提供新的视角和解决思路。
例如,在研究光的传播时,可以借鉴数学中的波动方程和光学中的折射定律,构建光的传播模型。
六、定性分析定性分析是一种通过观察和描述来分析物理现象的方法。
在观察现象时,我们可以从不同的角度出发,用自然语言来描述物质的运动和变化。
通过定性分析,我们可以建立直观的物理模型,并深入理解事物之间的关系。
例如,在研究磁场的特性时,可以通过观察磁铁与铁屑的相互作用来理解磁场的性质。
高考物理模型方法分类
高考物理模型方法分类一、力学模型力学模型是物理学中最基础的模型之一,主要研究物体的运动以及与力的关系。
力学模型的核心概念是牛顿三定律,即物体的运动状态是由力决定的。
在高考物理中,力学模型的应用非常广泛,例如弹簧振子模型、摩擦力模型、质点运动模型等。
弹簧振子模型是力学模型中的典型案例之一。
它通过模拟弹簧和质点的相互作用来研究弹簧振动的规律。
在考试中,我们可以利用弹簧振子模型来分析弹簧的弹性系数、振动频率等问题。
摩擦力模型是力学模型中的另一个重要内容。
摩擦力是物体表面接触时产生的一种力,它可以分为静摩擦力和动摩擦力。
在高考物理中,我们经常需要应用摩擦力模型来解决物体在斜面上滑动、静止的问题。
二、电磁学模型电磁学模型是研究电荷和电场、磁场之间相互作用的模型。
在高考物理中,电磁学模型的应用非常广泛,例如电场模型、电流模型、电磁感应模型等。
电场模型是电磁学模型中的重要内容之一。
电场是由电荷产生的一种力场,通过电场模型,我们可以研究电荷之间的相互作用、电场强度的计算等问题。
电磁感应模型是另一个重要的电磁学模型。
它研究磁场与导体中的电荷运动之间的相互作用。
在高考物理中,我们经常需要应用电磁感应模型来解决电磁感应强度、感应电动势等问题。
三、光学模型光学模型是研究光的传播、反射、折射等现象的模型。
在高考物理中,光学模型的应用也非常广泛,例如光的传播模型、光的反射模型、光的折射模型等。
光的传播模型是光学模型中的基础内容。
它研究光在介质中传播的规律,通过光的传播模型,我们可以解释光的直线传播、光的弯折等现象。
光的反射模型是另一个重要的光学模型。
它研究光在介质表面反射的规律,通过光的反射模型,我们可以解释镜面反射、漫反射等现象。
四、热学模型热学模型是研究热能传递和温度变化的模型。
在高考物理中,热学模型的应用也非常广泛,例如热传导模型、热辐射模型、理想气体模型等。
热传导模型是热学模型中的重要内容之一。
它研究热能在物体中的传导规律,通过热传导模型,我们可以解释导热现象、热平衡等问题。
高中物理典型物理模型及方法

高中典型物理模型及方法(精华)◆1.连接体模型:是指运动中几个物体或叠放在一起、或并排挤放在一起、或用细绳、细杆联系在一起的物体组。
解决这类问题的基本方法是整体法和隔离法。
整体法是指连接体内的物体间无相对运动时,可以把物体组作为整体,对整体用牛二定律列方程隔离法是指在需要求连接体内各部分间的相互作用(如求相互间的压力或相互间的摩擦力等)时,把某物体从连接体中隔离出来进行分析的方法。
连接体的圆周运动:两球有相同的角速度;两球构成的系统机械能守恒(单个球机械能不守恒) 与运动方向和有无摩擦(μ相同)无关,及与两物体放置的方式都无关。
平面、斜面、竖直都一样。
只要两物体保持相对静止 记住:N= 211212m F m F m m ++ (N 为两物体间相互作用力),一起加速运动的物体的分子m 1F 2和m 2F 1两项的规律并能应用⇒F 212m m m N+=讨论:①F 1≠0;F 2=0 122F=(m +m )a N=m aN=212m F m m +② F 1≠0;F 2≠0 N=211212m F m m m F ++(20F =就是上面的情况)F=211221m m g)(m m g)(m m ++F=122112m (m )m (m gsin )m m g θ++F=A B B 12m (m )m Fm m g ++F 1>F 2 m 1>m 2 N 1<N 2(为什么)N 5对6=F Mm (m 为第6个以后的质量) 第12对13的作用力 N 12对13=F nm12)m -(n◆2.水流星模型(竖直平面内的圆周运动——是典型的变速圆周运动)研究物体通过最高点和最低点的情况,并且经常出现临界状态。
(圆周运动实例) ①火车转弯 ②汽车过拱桥、凹桥 3③飞机做俯冲运动时,飞行员对座位的压力。
④物体在水平面内的圆周运动(汽车在水平公路转弯,水平转盘上的物体,绳拴着的物体在光滑水平面上绕绳的一端旋转)和物体在竖直平面内的圆周运动(翻滚过山车、水流星、杂技节目中的飞车走壁等)。
高中物理教学中如何建模

高中物理教学中如何建模?在研究物理问题当中,将物理对象、物理过程或物理情境处理成简单的模型后进行分析与计算十分常见。
例如宏观现象中的“日心说”、微观现象中的“原子核式结构模型”等;又如物理概念的建模有:质点、点电荷、单摆、弹簧振子、电场线等;物理过程的建模有:匀速直线运动、匀变速直线运动、自由落体运动、平抛运动、匀速圆周运动、简谐运动、简谐波等;物理情境的建模有:碰撞模型、子弹打木块模型、带电粒子在电场中运动模型等;物理实验的建模有:伽利略的理想实验模型、卢瑟福的 粒子散射实验等。
1、对物理概念建模。
物理概念是客观事物的物理共同属性和本质特征在人们头脑中的反映,是物理事物的抽象,是观察、实验和物理思维的产物。
任何物理概念的形成都离不开物理思维。
例如,虽然人们经常能观察到天体的运动、人的行走、动物的奔跑、车辆的前进、机器的运转等现象,但如果不通过分析、比较、抽象、概括等物理思维过程,找出它们共同的、本质的属性和特征,即一个物体相对于另一个物体位置的变化,就不可能建立机械运动的概念。
而我们在建立物理概念的时候,又必须忽略所研究物理原型的一些次要因素,抓住影响物理事物的主要因素来反映所研究的物理事物的本质属性,这样就建立理想化的物理模型,如质点、理想气体、点电荷、纯电阻、刚体、理想流体、绝对黑体等等。
例如在研究电学的问题中,有时带电体的形状、大小以及电荷分布可以忽略不计,即可将它看作是一个几何点,则这样的带电体就是点电荷。
与质点、刚体等概念一样,点电荷是实际带电体的抽象和近似,它是建立具有普遍意义的基本规律的不可或缺的理想模型,又是把复杂多样的实际问题转化或分解为基本问题时必不可少的分析手段。
例如,库仑定律、洛伦兹力公式的建立,带电体产生的电场以及带电体之间相互作用的定量研究,试验电荷的引入等等,都离不开点电荷。
2、对物理过程建模。
在中学物理中建立的理想化的物理过程有匀速直线运动、匀变速直线运动、自由落体运动、平抛运动、圆周运动、简谐运动、简谐波、绝热过程等。
高考物理模型方法分类

高考物理模型方法分类一、概述物理是高考理科中的一门重要科目,也是考生们普遍感到困难的科目之一。
在高考物理中,模型方法是解题的一种重要方法。
模型方法是指将物理问题简化为数学模型,通过对模型的分析和计算来解决实际问题。
本文将从不同的角度对高考物理中的模型方法进行分类和介绍。
二、基本模型方法1. 动力学模型方法动力学模型方法是物理中最基本的模型方法之一。
它通过描述物体的运动状态和运动规律来解决问题。
在高考物理中,我们常常使用牛顿定律和动量守恒定律来建立动力学模型,解决与运动相关的问题。
2. 能量守恒模型方法能量守恒模型方法是指通过建立能量守恒的数学模型来解决物理问题。
在高考物理中,我们常常使用机械能守恒、能量守恒、功和功率等概念来建立能量守恒模型,解决与能量相关的问题。
三、进阶模型方法1. 波动模型方法波动模型方法是指通过建立波动方程和波动传播规律的数学模型来解决波动问题。
在高考物理中,我们常常使用波动方程、波速和波长等概念来建立波动模型,解决与波动相关的问题。
2. 电磁模型方法电磁模型方法是指通过建立电磁场分布和电磁场相互作用规律的数学模型来解决电磁问题。
在高考物理中,我们常常使用静电场、电流和磁场等概念来建立电磁模型,解决与电磁相关的问题。
四、综合模型方法1. 统计模型方法统计模型方法是指通过建立统计规律和概率分布的数学模型来解决物理问题。
在高考物理中,我们常常使用统计物理、热力学和概率论等概念来建立统计模型,解决与统计相关的问题。
2. 相对论模型方法相对论模型方法是指通过建立相对论的数学模型来解决物理问题。
在高考物理中,我们常常使用相对论的时空观念、光速不变原理和质能关系等概念来建立相对论模型,解决与相对论相关的问题。
五、案例分析1. 动力学模型方法案例例如,一辆汽车在匀速行驶时,通过建立动力学模型,我们可以根据速度和时间的关系来求解汽车的位移。
2. 能量守恒模型方法案例例如,一个物体从一定高度自由落下,通过建立能量守恒模型,我们可以根据重力势能和动能的关系来求解物体的速度。
自动控制系统的建模与仿真

自动控制系统的建模与仿真自动控制系统是指通过传感器获得系统的各种信息,再通过计算机等设备实现对系统控制的一种系统。
建模与仿真是在设计自动控制系统时必不可少的环节,它能够帮助工程师们更好地理解和分析系统的运行规律,优化系统的控制算法,提高系统的性能。
一、建模方法自动控制系统的建模方法可以分为物理建模和数学建模两种。
1. 物理建模物理建模是将实际系统转化为物理模型,通过物理量之间的关系来描述系统的动态特性。
常见的物理建模方法有等效电路法、质量-弹簧-阻尼法等。
以温度控制系统为例,可以用热平衡方程来描述物理建模过程。
2. 数学建模数学建模是将系统抽象为数学模型,通过数学公式和方程来描述系统的动态行为。
数学建模通常使用微分方程、差分方程或状态方程等来描述系统的变化。
以飞机自动驾驶系统为例,可以通过线性化和非线性化的方法来建立数学模型。
二、仿真技术仿真技术通过计算机模拟实际系统的运行过程,以便更好地理解和分析系统的动态行为,优化控制算法。
1. 连续系统仿真对于连续系统,可以使用模拟仿真方法,将系统的数学模型转化为连续的微分方程,并通过数值求解方法来模拟系统的动态行为。
2. 离散系统仿真对于离散系统,可以使用数字仿真方法,将系统的数学模型转化为离散的差分方程,并通过迭代运算来模拟系统的动态行为。
三、常用仿真工具在自动控制系统的建模与仿真过程中,有许多常用的仿真工具可以帮助工程师们更加高效地开展工作。
1. MATLAB/SimulinkMATLAB/Simulink是一种功能强大的仿真工具,它提供了丰富的功能库和界面,方便了系统建模与仿真的过程。
工程师们可以通过编写脚本或者使用图形化界面进行系统建模与仿真。
2. LabVIEWLabVIEW是一种图形化编程工具,可以实现各种自动控制系统的建模与仿真。
它具有友好的用户界面和广泛的应用领域,适用于多种自动控制系统的建模与仿真。
3. Simulink Control DesignSimulink Control Design是MATLAB/Simulink中的一个工具包,专门用于自动控制系统的设计与仿真。
24个物理模型总结归纳

24个物理模型总结归纳物理模型是指通过建立数学模型或者物理实验来描述和解释物理系统的方法。
在物理学的研究中,各种物理模型被广泛应用于解决各种问题,帮助我们理解和预测自然界中发生的现象和规律。
本文将对24个常见的物理模型进行总结和归纳,以帮助读者更好地理解物理学中的重要概念和原理。
一、质点模型(Particle Model)质点模型是物理学中最简单的模型之一,它将物体简化为一个质点,忽略了物体的大小和形状,仅考虑其位置和质量。
这种模型通常用于研究质点在空间中的运动规律,如自由落体、抛体运动等。
二、弹簧模型(Spring Model)弹簧模型用于描述弹性物体的行为。
它基于胡克定律,即弹簧的伸长或缩短与外力成正比,这种模型被广泛应用于弹簧振子、弹簧劲度系统等物理问题的研究。
三、电路模型(Circuit Model)电路模型用于描述电流和电压在电路中的传递和转换规律。
通过建立电路图和应用基尔霍夫定律、欧姆定律等规律,可以计算电流、电压和阻抗等电路参数,解决各种电路问题。
四、热传导模型(Heat Conduction Model)热传导模型用于描述热量在物体或介质中的传递和分布规律。
它基于热传导方程和傅里叶定律,可以计算热传导过程中的温度变化和热流量等参数,解决热传导问题。
五、光线模型(Ray Optics Model)光线模型用于描述光在直线传播时的规律。
通过光的反射、折射等现象,可以计算光线的传播路径和光的成像特性,解决光学问题,如镜子、透镜等光学器件的成像原理。
六、气体模型(Gas Model)气体模型用于描述气体的状态和行为。
它基于理想气体状态方程和玻意耳定律,可以计算气体的压力、体积和温度等参数,解决气体的扩散、压缩等问题。
七、电磁场模型(Electromagnetic Field Model)电磁场模型用于描述电荷和电流在空间中产生的电场和磁场的分布和相互作用规律。
它基于麦克斯韦方程组,可以计算电荷受力、电流感应等问题,解决电磁场中的电磁现象。
0衡水中学物理最经典-物理建模系列(八) 天体运行中的“两种常见模型”

物理建模系列(八) 天体运行中的“两种常见模型”1.双星模型 (1)模型构建在天体运动中,将两颗彼此相距较近,且在相互之间万有引力作用下绕两者连线上的某点做周期相同的匀速圆周运动的行星称为双星.(2)模型条件①两颗星彼此相距较近.②两颗星靠相互之间的万有引力做匀速圆周运动. ③两颗星绕同一圆心做圆周运动. (3)模型特点①“向心力等大反向”——两颗星做匀速圆周运动的向心力由它们之间的万有引力提供,故F 1=F 2,且方向相反,分别作用在两颗行星上,是一对作用力和反作用力.②“周期、角速度相同”——两颗行星做匀速圆周运动的周期、角速度相等. ③“半径反比”——圆心在两颗行星的连线上,且r 1+r 2=L ,两颗行星做匀速圆周运动的半径与行星的质量成反比.2.三星模型 系统三星系统(正三角形排列)三星系统(直线等间距排列)图示向心力的来源另外两星球对其万有引力的合力另外两星球对其万有引力的合力例 (2018·河北定州中学摸底)双星系统中两个星球A 、B 的质量都是m ,相距L ,它们正围绕两者连线上某一点做匀速圆周运动.实际观测该系统的周期T 要小于按照力学理论计算出的周期理论值T 0,且TT 0=k (k <1),于是有人猜测这可能是受到了一颗未发现的星球C的影响,并认为C 位于A 、B 的连线正中间,相对A 、B 静止,则A 、B 组成的双星系统周期理论值T 0及C 的质量分别为( )A .2π L 22Gm ,1+k 24k m B .2π L 32Gm ,1-k 24k m C .2π2Gm L 3,1+k 24km D .2πL 32Gm ,1-k 24k2m 【解析】 由题意知,A 、B 的运动周期相同,设轨道半径分别为r 1、r 2,对A 有,Gm 2L2=m ⎝⎛⎭⎫2πT 02r 1,对B 有,Gm 2L2=m ⎝⎛⎭⎫2πT 02r 2,且r 1+r 2=L ,解得T 0=2π L 32Gm;有C 存在时,设C 的质量为M ,A 、B 与C 之间的距离r ′1=r ′2=L 2,则Gm 2L 2+GMm r ′21=m ⎝⎛⎭⎫2πT 2r 1,Gm 2L 2+GMm r ′22=m ⎝⎛⎭⎫2πT 2r 2,解得T =2π L 32G (m +4M ),TT 0=mm +4M=k 得M =1-k 24k 2m .【答案】 D解答双星问题应注意“两等”“两不等”(1)“两等”①它们的角速度相等.②双星做匀速圆周运动的向心力由它们之间的万有引力提供,即它们受到的向心力大小总是相等的.(2)“两不等”①双星做匀速圆周运动的圆心是它们连线上的一点,所以双星做匀速圆周运动的半径与双星间的距离是不相等的,它们的轨道半径之和才等于它们间的距离.②由m 1ω2r 1=m 2ω2r 2知由于m 1与m 2一般不相等,故r 1与r 2一般也不相等.[高考真题]1.(2016·课标卷Ⅲ,14)关于行星运动的规律,下列说法符合史实的是( ) A .开普勒在牛顿定律的基础上,导出了行星运动的规律 B .开普勒在天文观测数据的基础上,总结出了行星运动的规律C .开普勒总结出了行星运动的规律,找出了行星按照这些规律运动的原因D .开普勒总结出了行星运动的规律,发现了万有引力定律【解析】 开普勒在天文观测数据的基础上,总结出了开普勒天体运动三定律,找出了行星运动的规律,而牛顿发现了万有引力定律,A 、C 、D 错误,B 正确.【答案】 B2.(2014·课标卷Ⅱ,18)假设地球可视为质量均匀分布的球体.已知地球表面重力加速度在两极的大小为g 0;在赤道的大小为g ;地球自转的周期为T ;引力常量为G .地球的密度为( )A.3πGT 2g 0-gg 0 B .3πGT 2g 0g 0-gC.3πGT2 D .3πGT 2g 0g【解析】 由万有引力定律可知:在两极处G Mm R 2=mg 0,在赤道上:G Mm R 2=mg +m (2πT )2R ,地球的质量:M =43πR 3ρ,联立三式可得:ρ=3πGT 2g 0g 0-g,选项B 正确.【答案】 B3.(2015·课标卷Ⅱ,16)由于卫星的发射场不在赤道上,同步卫星发射后需要从转移轨道经过调整再进入地球同步轨道.当卫星在转移轨道上飞经赤道上空时,发动机点火,给卫星一附加速度,使卫星沿同步轨道运行.已知同步卫星的环绕速度约为3.1×103 m/s ,某次发射卫星飞经赤道上空时的速度为1.55×103 m/s ,此时卫星的高度与同步轨道的高度相同,转移轨道和同步轨道的夹角为30°,如图所示,发动机给卫星的附加速度的方向和大小约为( )A .西偏北方向,1.9×103 m/sB .东偏南方向,1.9×103 m/sC .西偏北方向,2.7×103 m/sD .东偏南方向,2.7×103 m/s【解析】 附加速度Δv 与卫星飞经赤道上空时速度v 2及同步卫星的环绕速度v 1的矢量关系如图所示.由余弦定理可知,Δv =v 21+v 22-2v 1v 2cos 30°≈1.9×103 m/s ,方向东偏南方向,故B 正确,A 、C 、D 错误.【答案】 B[名校模拟]4.(2018·山东临沂高三上学期期中)据报道,2020年前我国将发射8颗海洋系列卫星,包括2颗海洋动力环境卫星和2颗海陆雷达卫星(这4颗卫星均绕地球做匀速圆周运动),以加强对黄岩岛、钓鱼岛及西沙群岛全部岛屿附近海域的监测.设海陆雷达卫星的轨道半径是海洋动力环境卫星的n 倍,下列说法正确的是( )A .在相同时间内,海陆雷达卫星到地心的连线扫过的面积与海洋动力环境卫星到地心的连线扫过的面积相等B .海陆雷达卫星做匀速圆周运动的半径的三次方与周期的平方之比等于海洋动力环境卫星做匀速圆周运动的半径的三次方与周期的平方之比C .海陆雷达卫星与海洋动力环境卫星角速度之比为n 32∶1D .海陆雷达卫星与海洋动力环境卫星周期之比为1∶n 32【解析】 由于轨道半径不同,相同时间内扫过的面积不相等,A 错;由开普勒第三定律r 3T2=k 可知,B 项正确;由ω=GM r 3∝r -32得,ω1∶ω2=n -32∶1,由T =2πr 3GM得,T 1∶T 2=1∶n -32,C 、D 均错.【答案】 B5.(2018·山东济南一中上学期期中)在未来的“星际穿越”中,某航天员降落在一颗不知名的行星表面上.该航天员从高h =L 处以初速度v 0水平抛出一个小球,小球落到星球表面时,与抛出点的距离是5L ,已知该星球的半径为R ,引力常量为G ,则下列说法正确的是( )A .该星球的质量M =v 20R22GLB .该星球的质量M =2v 20R25GLC .该星球的第一宇宙速度v =v 0 R 2LD .该星球的第一宇宙速度v =v 0R L【解析】 在该星球表面处:mg =GMm R 2,g =GM R 2,x =v 0t ,y =12gt 2=L ,t =2Lg,由5L =x 2+y 2,得g =v 202L ,M =v 20R 22GL,该星球的第一宇宙速度v =gR =v 0R2L,故A 、C 正确.【答案】 AC 6.(2018·山东潍坊高三上学期期中)2017年8月16日凌晨,中国量子卫星“墨子”在酒泉卫星发射中心成功发射,目前“墨子”已进入离地面高度为h 的极地预定轨道(轨道可视为圆轨道),如图所示.若“墨子”从北纬30°的正上方按图示方向第一次运行至南纬60°正上方,所用时间为t ,已知地球半径为R ,地球表面的重力加速度为g ,引力常量为G ,忽略地球自转,由以上条件可知( )A .地球的质量为gRGB .卫星运行的角速度为π2tC .卫星运行的线速度为πR2tD .卫星运行的线速度为π(R +h )2t【解析】 在地球表面Mg =GMm R 2,M =gR 2G ,A 错;第一次运行至南纬60°历时t =T4,而T =2πω,所以ω=π2t ,B 对;v =ω(R +h )=π(R +h )2t,C 错,D 对.【答案】 BD课时作业(十三) [基础小题练]1.(2018·华中师大第一附中高三上学期期中)已知甲、乙两行星的半径之比为2∶1,环绕甲、乙两行星表面运行的两卫星周期之比为4∶1,则下列结论中正确的是( )A .甲、乙两行星表面卫星的动能之比为1∶4B .甲、乙两行星表面卫星的角速度之比为1∶4C .甲、乙两行星的质量之比为1∶2D .甲、乙两行星的第一宇宙速度之比为2∶1 【解析】 由GMm r 2=mrω2=m v 2r 得ω=GMr 3,v = GM r ,E k =12m v 2, T =2πω=2πr 3GM,代入数据得M 甲∶M 乙=1∶2,ω甲∶ω乙=1∶4,v 甲∶v 乙=1∶2,卫星质量关系不知,不能比较动能大小.【答案】 BC2.天文学家新发现了太阳系外的一颗行星,这颗行星的体积是地球的a 倍,质量是地球的b 倍.已知某一近地卫星绕地球运动的周期约为T ,引力常量为G ,则该行星的平均密度为( )A.4πGb 2T 2a 2 B .4πa GT 2bC.3πb GT 2aD .4πbGT 2a【解析】 对于近地卫星,设其质量为m ,地球的质量为M ,半径为R ,则根据万有引力提供向心力有,G Mm R 2=m ⎝⎛⎭⎫2πT 2R ,得地球的质量M =4π2R 3GT 2,地球的密度为ρ=M 43πR 3=3πGT2;已知行星的体积是地球的a 倍,质量是地球的b 倍,结合密度公式ρ=mV ,得该行星的平均密度是地球的b a 倍,所以该行星的平均密度为3πbGT 2a,故C 正确.【答案】 C3.双星运动是产生引力波的来源之一,假设宇宙中有一双星系统由a 、b 两颗星体组成,这两颗星体绕它们连线的某一点在万有引力作用下做匀速圆周运动,测得两星体的轨道半径之和为l 1,轨道半径之差为l 2,a 星体轨道半径大于b 星体轨道半径,a 星体的质量为m 1,引力常量为G ,则b 星体的周期为( )A.2π2l 21(l 1-l 2)Gm 1B .2π2l 21(l 1+l 2)Gm 1C.2π2l 21(l 1-l 2)Gm 1(l 1+l 2)D .2π2l 21(l 1+l 2)Gm 1(l 1-l 2)【解析】 设a 星体运动的轨道半径为r 1,b 星体运动的轨道半径为r 2,则r 1+r 2=l 1,r 1-r 2=l 2,解得r 1=l 1+l 22,r 2=l 1-l 22,双星系统根据Gm 1m 2l 21=m 1⎝⎛⎭⎫2πT 2r 1,Gm 1m 2l 21=m 2⎝⎛⎭⎫2πT 2r 2,得m 1m 2=r 2r 1,即双星系统中星体质量与轨道半径成反比,得b 星体的质量m 2=r 1m 1r 2=(l 1+l 2)m 1l 1-l 2,a 、b 两星体运动周期相同,对a 星体有Gm 1m 2l 21=m 1⎝⎛⎭⎫2πT 2r 1,解得T =2π2l 21(l 1-l 2)Gm 1,A 选项正确.【答案】 A4.(2018·江苏泰州高三上学期期中)2016年10月19日3时31分,神舟十一号载人飞船与天宫二号空间实验室成功实现自动交会对接,此时天宫二号绕地飞行一圈时间为92.5 min ,而地球同步卫星绕地球一圈时间为24 h ,根据此两组数据我们能求出的是( )A .天宫二号与地球同步卫星受到的地球引力之比B .天宫二号与地球同步卫星的离地高度之比C .天宫二号与地球同步卫星的线速度之比D .天宫二号与地球同步卫星的加速度之比【解析】 由F =GMm r 2及GMm r 2=mrω2=m v 2r =ma 可知,ω=GMr 3,T =2π r 3GM,a =GMr2,v =GMr,已知周期关系可确定半径关系,进而确定线速度关系,加速度关系,但由于不知天宫二号和同步卫星的质量关系,故所受地球引力关系不确定,地球半径未知,所以离地高度关系不确定,C 、D 正确.【答案】 CD5.(2018·安徽师大附中高三上学期期中)登上火星是人类的梦想,“嫦娥之父”欧阳自远透露:中国计划于2020年登陆火星.地球和火星的公转视为匀速圆周运动.忽略行星自转影响,火星和地球相比( )行星 半径/m 质量/kg 公转轨道半径/m地球 6.4×106 6.0×1024 1.5×1011 火星3.4×1066.4×10232.3×1011A.火星的“第一宇宙速度”约为地球的第一宇宙速度的0.45倍 B .火星的“第一宇宙速度”约为地球的第一宇宙速度的1.4倍 C .火星公转的向心加速度约为地球公转的向心加速度的0.43倍 D .火星公转的向心加速度约为地球公转的向心加速度的0.28倍 【解析】 根据第一宇宙速度公式v = GMR (M 指中心天体太阳的质量),v 火v 地=R 地R 火=6.4×1063.4×106=1.4 ,故A 错误,B 正确.根据向心加速度公式a =GMr 2(M 指中心天体太阳的质量),a 火a 地=r 2地r 2火=(1.5×10112.3×1011)2=0.43,故C 正确,D 错误.【答案】 BC6.(2018·山东泰安高三上学期期中)发射地球同步卫星时,先将卫星发射至近地圆轨道1,然后经点火,使其沿椭圆轨道2运行,最后再次点火,将卫星送入同步椭圆轨道3.轨道1、2相切于Q 点,轨道2、3相切于P 点.轨道3到地面的高度为h ,地球的半径为R ,地球表面的重力加速度为g .以下说法正确的是( )A .卫星在轨道3上的机械能大于在轨道1上的机械能B .卫星在轨道3上的周期小于在轨道2上的周期C .卫星在轨道2上经过Q 点时的速度小于它在轨道3上经过P 时的速度D .卫星在轨道3上的线速度为v =Rg R +h【解析】 卫星经历两次点火加速才转移至同步轨道3,在轨道3上的机械能肯定大于轨道1上的机械能,A 对;由T =2πr 3GM可知,B 错;由于v =GMr,所以v 1>v 3,又轨道2上Q 点离心运动,由v Q >v 1可知v Q >v 3,所以v Q >v P ,C 错;将r =R +h ,GM =gR 2,代入v =GMr得v =R gR +h,D 对. 【答案】 AD[创新导向练]7.巧思妙想——以“苹果”为话题考查天体运行规律已知地球的半径为6.4×106 m ,地球自转的角速度为7.27×10-5rad/s ,地球表面的重力加速度为9.8 m/s 2,在地球表面发射卫星的第一宇宙速度为7.9×103 m/s ,第三宇宙速度为16.7×103 m/s ,月地中心间距离为3.84×108 m .假设地球上有一颗苹果树长到月球那么高,则当苹果脱离苹果树后,请根据此时苹果线速度的计算,判断苹果将不会( )A .落回地面B .成为地球的“苹果月亮”C .成为地球的同步“苹果卫星”D .飞向茫茫宇宙【解析】 地球自转的角速度为7.27×10-5rad/s ,月球到地球中心的距离为3.84×108 m ,地球上有一棵苹果树长到了接近月球那么高,根据v =rω得:苹果的线速度为v =2.8×104 m/s ,第三宇宙速度为16.7×103 m/s ,由于苹果的线速度大于第三宇宙速度,所以苹果脱离苹果树后,将脱离太阳系的束缚,飞向茫茫宇宙,故A 、B 、C 正确.【答案】 ABC8.科学探索——以“一箭20星”为背景考查卫星运行参数月球和地球的质量之比为a ∶1,半径之比为b ∶1,将一单摆由地球带到月球,将摆球从与地球表面相同高度处由静止释放(释放点高度低于悬点高度),释放时摆线与竖直方向的夹角相同,当摆球运动到最低点时,在月球上和地球上摆线对摆球的拉力之比为( )A.b 2a B .a b 2C.a 2bD .b a2【解析】 设重力加速度大小为g ,摆球释放的高度为h ,摆球运动到最低点有mgh =12m v 2,摆球在最低点有F -mg =m v 2l ,得F =mg +2mghl,F 与g 成正比.在星球表面上有GMm R 2=mg ,得g =GM R 2,故摆球在月球和地球上受到的拉力之比为ab 2,B 选项正确. 【答案】 B9.军事科技——以导弹拦截为背景考查万有引力定律知识2016年1月27日,我国在境内再次成功地进行了陆基中段反导拦截技术试验,中段是指弹道导弹在大气层外空间依靠惯性飞行的一段.如图所示,一枚蓝军弹道导弹从地面上A 点发射升空,目标是攻击红军基地B 点,导弹升空后,红军反导预警系统立刻发现目标,从C 点发射拦截导弹,并在弹道导弹飞行中段的最高点D 将其击毁.下列说法中正确的是( )A .图中E 到D 过程,弹道导弹机械能不断增大B .图中E 到D 过程,弹道导弹的加速度不断减小C .弹道导弹在大气层外运动轨迹是以地心为焦点的椭圆D .弹道导弹飞行至D 点时速度大于7.9 km/s【解析】 图中E 到D 过程, 导弹在大气层外空间依靠惯性飞行,没有空气阻力,机械能不变,远离地球,轨道变大,速度减小,万有引力减小,所以加速度减小,在万有引力作用下,运动轨迹是以地心为焦点的椭圆,A 错误,B 、C 正确;第一宇宙速度是近地卫星的环绕速度,而D 点在大气层外部,所以轨道要大于近地卫星轨道,运行速度要小于第一宇宙速度,D 错误;故选B 、C.【答案】 BC10.探测火星——以火星探测为背景考查星体运行规律随着人类航天事业的进步,太空探测越来越向深空发展,火星正在成为全球航天界的“宠儿”.我国计划于2020年发射火星探测器,一步实现绕、落、巡工程目标.假设某宇航员登上了火星,在其表面以初速度v 竖直上抛一小球(小球仅受火星的引力作用),小球上升的最大高度为h ,火星的直径为d ,引力常量为G ,则( )A .火星的第一宇宙速度为v d hB .火星的密度为3v 24πGhdC .火星的质量为v 2d 22GhD .火星的“近火卫星”运行周期为2πvd h【解析】 在火星表面竖直上抛的小球做匀减速直线运动,设火星表面的重力加速度为g ,第一宇宙速度为v 0,火星的自转周期为T ,则2gh =v 2,得g =v 22h,在火星表面的物体的重力等于万有引力,也是在火星表面附近做圆周运动的向心力,mg =G Mm r 2=m (2πT )2r ,又r=d 2,M =43πr 3·ρ,得:v 0=v d 4h ,M =v 2d 28Gh ,ρ=3v 24πGhd,T =2πv dh2,故选B. 【答案】 B[综合提升练]11.(2018·山东淄博一中高三上学期期中)如图所示,火箭载着宇宙探测器飞向某行星,火箭内平台上还放有测试仪器.火箭从地面起飞时,以加速度g 02竖直向上做匀加速直线运动(g 0为地面附近的重力加速度),已知地球半径为R 0.(1)到某一高度时,测试仪器对平台的压力是起飞前的1718,求此时火箭离地面的高度h ;(2)探测器与箭体分离后,进入行星表面附近的预定轨道,进行一系列科学实验和测量,若测得探测器环绕该行星运动的周期为T 0,试问:该行星的平均密度为多少?(假定行星为球体,且已知万有引力恒量为G )【解析】 (1)火箭起飞前有:N 1=mg 0 火箭起飞后有:N 2-mg =mg 02 且有N 1N 2=1718GMmR 2=mg 0 GMm(R +h )2=mg联立以上各式解得h =R2.(2)设行星半径为r ,质量为M ,密度为ρ,则 GM 1m r 2=mr ⎝⎛⎭⎫2πT 02由ρ=M 1V ,V =43πr 3得ρ=3πGT 20. 【答案】 (1)R 2 (2)3πGT 2012.中国计划在2017年实现返回式月球软着陆器对月球进行科学探测,宇航员在月球上着陆后,自高h 处以初速度v 0水平抛出一小球,测出水平射程为L (这时月球表面可以看成是平坦的),已知月球半径为R ,万有引力常量为G .求:(1)月球表面处的重力加速度及月球的质量M 月;(2)如果要在月球上发射一颗绕月球运行的卫星,所需的最小发射速度为多大?(3)当着陆器绕距月球表面高H 的轨道上运动时,着陆器环绕月球运动的周期是多少?【解析】 (1)设月球表面的重力加速度为g ,由平抛运动规律有h =12gt 2① L =v 0·t ②得g =2h v 20L 2③ 着陆器在月球表面所受的万有引力等于重力,GM 月m R 2=mg ④得M 月=2h v 20R 2GL 2⑤ (2)卫星绕月球表面运行,有GM 月m ′R 2=m ′v 2R ⑥联立⑤⑥得v =v 0L2hR ⑦ (3)由牛顿第二定律有G M 月m (R +H )2=m (R +H )4π2T 2⑧联立⑤⑧得T =2π2L 2(R +H )3hR 2v 20. 【答案】 (1)2h v 20L 2 2h v 20R 2GL 2 (2)v 0L 2hR (3)2π2L 2(R +H )3hR 2v 20。
物理建模系列(七) 竖直平面内圆周运动的两种模型

物理建模系列(七)竖直平面内圆周运动的两种模型1.模型构建在竖直平面内做圆周运动的物体,运动至轨道最高点时的受力情况可分为两类:一是无支撑(如球与绳连接,沿内轨道的“过山车”等),称为“轻绳模型”;二是有支撑(如球与杆连接,小球在弯管内运动等),称为“轻杆模型”.2.模型条件(1)物体在竖直平面内做变速圆周运动.(2)“轻绳模型”在轨道最高点无支撑,“轻杆模型”在轨道最高点有支撑.3.常用模型面内;套在大环上质量为m的小环(可视为质点),从大环的最高处由静止滑下.重力加速度大小为g .当小环滑到大环的最低点时,大环对轻杆拉力的大小为( )A .Mg -5mgB .Mg +mgC .Mg +5mgD .Mg +10mg【解析】 解法一:以小环为研究对象,设大环半径为R ,根据机械能守恒定律,得mg ·2R =12m v 2,在大环最低点有F N -mg =m v 2R ,得F N =5mg ,此时再以大环为研究对象,受力分析如图,由牛顿第三定律知,小环对大环的压力为F ′N =F N ,方向竖直向下,故F =Mg +5mg ,由牛顿第三定律知C 正确.解法二:设小环滑到大环最低点时速度为v ,加速度为a ,根据机械能守恒定律12m v 2=mg ·2R ,且a =v 2R,所以a =4g ,以整体为研究对象,受力情况如图所示.F -Mg -mg =ma +M ·0 所以F =Mg +5mg ,C 正确. 【答案】 C[高考真题]1.(2016·上海卷,16)风速仪结构如图(a)所示.光源发出的光经光纤传输,被探测器接收,当风轮旋转时,通过齿轮带动凸轮圆盘旋转,当圆盘上的凸轮经过透镜系统时光被挡住.已知风轮叶片转动半径为r ,每转动n 圈带动凸轮圆盘转动一圈.若某段时间Δt 内探测器接收到的光强随时间变化关系如图(b)所示,则该时间段内风轮叶片( )A .转速逐渐减小,平均速率为4πnr ΔtB .转速逐渐减小,平均速率为8πnrΔtC .转速逐渐增大,平均速率为4πnrΔtD .转速逐渐增大,平均速率为8πnrΔt【解析】 据题意,从b 图可以看出,在Δt 时间内,探测器接收到光的时间在增长,圆盘凸轮的挡光时间也在增长,可以确定圆盘凸轮的转动速度在减小;在Δt 时间内可以从图看出有4次挡光,即圆盘转动4周,则风轮叶片转动了4n 周,风轮叶片转过的弧长为l =4n ×2πr ,叶片转动速率为:v =8n πrΔt,故选项B 正确.【答案】 B2.(2016·浙江卷,20)如图所示为赛车场的一个水平“梨形”赛道,两个弯道分别为半径R =90 m 的大圆弧和r =40 m 的小圆弧,直道与弯道相切.大、小圆弧圆心O 、O ′距离L =100 m .赛车沿弯道路线行驶时,路面对轮胎的最大径向静摩擦力是赛车重力的2.25倍.假设赛车在直道上做匀变速直线运动,在弯道上做匀速圆周运动.要使赛车不打滑,绕赛道一圈时间最短(发动机功率足够大,重力加速度g =10 m/s 2,π=3.14),则赛车( )A .在绕过小圆弧弯道后加速B .在大圆弧弯道上的速率为45 m/sC .在直道上的加速度大小为5.63 m/s 2D .通过小圆弧弯道的时间为5.58 s【解析】 赛车用时最短,就要求赛车通过大、小圆弧时,速度都应达到允许的最大速度,通过小圆弧时,由2.25mg =m v 21r 得v 1=30 m/s ;通过大圆弧时,由2.25mg =m v 22R得v 2=45 m/s ,B 项正确.赛车从小圆弧到大圆弧通过直道时需加速,故A 项正确.由几何关系可知连接大、小圆弧的直道长x =50 3 m ,由匀加速直线运动的速度位移公式:v 22-v 21=2ax得a ≈6.50 m/s 2,C 项错误;由几何关系可得小圆弧所对圆心角为120°,所以通过小圆弧弯道的时间t =13×2πrv 1≈2.79 s ,故D 项错误.【答案】 AB3.(2015·课标卷Ⅰ,22)某物理小组的同学设计了一个粗测玩具小车通过凹形桥最低点时的速度的实验.所用器材有:玩具小车、压力式托盘秤、凹形桥模拟器(圆弧部分的半径为R =0.20 m).完成下列填空:(1)将凹形桥模拟器静置于托盘秤上,如图(a)所示,托盘秤的示数为1.00 kg.(2)将玩具小车静置于凹形桥模拟器最低点时,托盘秤的示数如图(b)所示,该示数为 ________ kg.(3)将小车从凹形桥模拟器某一位置释放,小车经过最低点后滑向另一侧,此过程中托盘秤的最大示数为m ;多次从同一位置释放小车,记录各次的m 值如下表所示.(4)N ;小车通过最低点时的速度大小为 ________ m/s.(重力加速度大小取9.80 m/s 2,计算结果保留2位有效数字)【解析】 (2)由题图(b)可知托盘秤量程为10 kg ,指针所指的示数为1.40 kg.(4)由多次测出的m 值,利用平均值可求m =1.81 kg.而模拟器的重力为G =m 0g =9.8 N ,所以小车经过凹形桥最低点时对桥的压力为F N =mg -m 0g ≈7.9 N ;根据径向合力提供向心力,即7.9 N -(1.40-1.00)×9.8 N =0.4v 2R,解得v ≈1.4 m/s.【答案】 (2)1.40 (4)7.9 1.4[名校模拟]4.(2018·山东烟台高三上学期期中)如图所示,水平圆盘可以绕竖直转轴OO ′转动,在距转轴不同位置处通过相同长度的细绳悬挂两个质量相同的物体A 、B .不考虑空气阻力的影响,当圆盘绕OO ′轴匀速转动达到稳定状态时,下列说法正确的是( )A .A 比B 的线速度小B .A 与B 的向心加速度大小相等C .细绳对B 的拉力大于细绳对A 的拉力D .悬挂A 与B 的细绳与竖直方向夹角相等【解析】 物体A 、B 绕同一轴转动,角速度相同,由v =ωr 知,v A <v B ,由a =ω2r 知,a A <a B ,由T sin θ=ma ,T cos θ=mg 及a A <a B 得T A <T B ,θA <θB ,故A 、C 正确.【答案】 AC5.(2018·广东惠州市高三上学期第二次调研)如图甲所示是中学物理实验室常用的感应起电机,它是由两个大小相等直径约为30 cm 的感应玻璃盘起电的.其中一个玻璃盘通过从动轮与手摇主动轮链接如图乙所示,现玻璃盘以100 r/min 的转速旋转,已知主动轮的半径约为8 cm ,从动轮的半径约为2 cm ,P 和Q 是玻璃盘边缘上的两点,若转动时皮带不打滑,下列说法正确的是( )A .玻璃盘的转动方向与摇把转动方向相反B .P 、Q 的线速度相同C .P 点的线速度大小约为1.6 m/sD .摇把的转速约为400 r/min【解析】 若主动轮做顺时针转动,从动轮通过皮带的摩擦力带动转动,所以从动轮逆时针转动,所以玻璃盘的转动方向与摇把转动方向相反,故A 正确;线速度也有一定的方向,由于线速度的方向沿曲线的切线方向,由图可知,P 、Q 两点的线速度的方向一定不同,故B 错误;玻璃盘的直径是30 cm ,转速是100 r/min ,所以线速度:v =ωr =2n πr =2×10060×π×0.32m/s =0.5π m/s ≈1.6 m/s ,故C 正确;从动轮边缘的线速度:v c =ωr c =2×10060×π×0.02m/s =115π m/s ,由于主动轮的边缘各点的线速度与从动轮边缘各点的线速度的大小相等,即v z =v c ,所以主动轮的转速:n z =ωz 2π=v z r z 2π=115π2π×0.08=12.4r/s =25 r/min.故D 错误.【答案】 AC6.(2018·华中师大第一附中高三上学期期中)如图所示,ABC 为在竖直平面内的金属半圆环,AC 连线水平,AB 为固定的直金属棒,在金属棒上和圆环的BC 部分分别套着两个相同的小环M 、N ,现让半圆环绕对称轴以角速度ω做匀速转动,半圆环的半径为R ,小圆环的质量均为m ,棒和半圆环均光滑,已知重力加速度为g ,小环可视为质点,则M 、N 两环做圆周运动的线速度之比为( )A.gR 2ω4-g 2B .g 2-R 2ω4gC.g g 2-R 2ω4D .R 2ω4-g 2g【解析】 AB 杆倾角45°,对于M 环:mg =mrω2=m v 2Mr2v M =g ω.对于N 环:mg tan θ=mR sin θ·ω2=mωv N v N =R sin θ·ω=Rω1-g 2R 2ω4 所以v M ∶v N =g ∶R 2ω4-g 2,A 对,B 、C 、D 错. 【答案】 A课时作业(十二) [基础小题练]1.如图所示,一偏心轮绕垂直纸面的轴O 匀速转动,a 和b 是轮上质量相等的两个质点,则偏心轮转动过程中a 、b 两质点( )A .角速度大小相同B .线速度大小相同C .向心加速度大小相同D .向心力大小相同【解析】同轴转动角速度相等,A 正确;由于两者半径不同,根据公式v =ωr 可得两点的线速度不同,B 错误;根据公式a =ω2r ,角速度相同,半径不同,所以向心加速度不同,C 错误;根据公式F =ma ,质量相同,但是加速度不同,所以向心力大小不同,D 错误.【答案】 A2.(2018·甘肃河西五市联考)利用双线可以稳固小球在竖直平面内做圆周运动而不易偏离竖直面,如图所示,用两根长为L 的细线系一质量为m 的小球,两线上端系于水平横杆上,A ,B 两点相距也为L ,若小球恰能在竖直面内做完整的圆周运动,则小球运动到最低点时,每根细线承受的张力为( )A .23mgB .3mgC .2.5mgD .732mg【解析】 小球恰好过最高点时有mg =m v 21R,解得v 1=32gL ,根据动能定理得mg ·3L =12m v 22-12m v 21,由牛顿第二定律得3T -mg =m v 2232L ,联立得T =23mg ,故A 正确,B 、C 、D 错误.【答案】 A3.如图为某一皮带传动装置.主动轮的半径为r 1,从动轮的半径为r 2.已知主动轮做顺时针转动,转速为n 1,转动过程中皮带不打滑.下列说法正确的是( )A .从动轮做顺时针转动B .从动轮做逆时针转动C .从动轮边缘线速度大小为r 22r 1n 1D .从动轮的转速为r 2r 1n 1【解析】 主动轮沿顺时针方向转动时,传送带沿M →N 方向运动,故从动轮沿逆时针方向转动,故A 错误,B 正确;由ω=2πn 、v =ωr 可知,2πn 1r 1=2πn 2r 2,解得n 2=r 1r 2n 1,从动轮边缘线速度大小v =2πn 2r 2=2πn 1r 1,故C 、D 错误.【答案】 B4.(2018·山东青岛市即墨一中高三上学期期中)如图所示,甲、乙圆盘的半径之比为1∶2,两水平圆盘紧靠在一起,乙靠摩擦随甲不打滑转动.两圆盘上分别放置质量为m 1和m 2的小物体,m 1=2m 2,两小物体与圆盘间的动摩擦因数相同.m 1距甲盘圆心为r ,m 2距乙盘圆心为2r ,此时它们正随圆盘做匀速圆周运动.下列判断正确的是( )A .m 1和m 2的线速度之比为1∶4B .m 1和m 2的向心加速度之比为2∶1C .随转速慢慢增加,m 1先开始滑动D .随转速慢慢增加,m 2先开始滑动【解析】 甲、乙两轮子边缘上的各点线速度大小相等,有:ω1R =ω22R ,则得ω1∶ω2=2∶1,所以物块相对圆盘开始滑动前,m 1与m 2的角速度之比为2∶1.根据公式:v =ωr ,所以:v 1v 2=ω1r ω2·2r =11,故A 错误.根据a =ω2r 得:m 1与m 2的向心加速度之比为 a 1∶a 2=(ω21r )∶(ω222r )=2∶1,故B 正确.根据μmg =mrω2=ma 知,m 1先达到临界角速度,可知当转速增加时,m 1先开始滑动,故C 正确,D 错误.【答案】 BC5.如图所示,水平放置的圆筒可以绕中心轴线匀速转动,在圆筒上的直径两端有两个孔A 、B ,当圆筒的A 孔转到最低位置时,一个小球以速度v 0射入圆筒,圆筒的半径为R ,要使小球能够不碰到筒壁首次离开圆筒,则圆筒转动的角速度可能为(已知重力加速度大小为g )( )A.n πgv 0,n =1,2,3,… B.(2n -1)πg 2v 0,n =1,2,3,…C.2n πg v 0-v 20-4Rg ,n =1,2,3,…D.2n πg v 0+v 20-4Rg,n =1,2,3,… 【解析】 若小球上升最大高度小于圆筒直径,小球从A 孔离开,则竖直上抛时间为t =2v 0g =2n πω,n =1,2,3,…,ω=n πgv 0,A 正确;若小球上升最大高度小于圆筒直径,从B 孔离开,则有t =2v 0g =(2n -1)πω,n =1,2,3,…,ω=(2n -1)πg 2v 0,B 正确;若小球上升最大高度大于直径,从B 孔离开,小球经过圆筒时间为t ,则有2R =v 0t -gt 22,圆筒转动时间为t =2n πω,n =1,2,3,…,解得ω=2n πgv 0-v 20-4Rg ,C 正确;若小球上升最大高度大于直径,从A 孔离开,则圆筒转动时间为t =(2n -1)πω,n =1,2,3,…,解得ω=(2n -1)πgv 0-v 20-4Rg,D 错误. 【答案】 ABC6.(2018·开封高三模拟)在离心浇铸装置中,电动机带动两个支承轮同向转动,管状模型放在这两个轮上靠摩擦转动,如图所示,铁水注入之后,由于离心作用,铁水紧紧靠在模型的内壁上,从而可得到密实的铸件,浇铸时转速不能过低,否则,铁水会脱离模型内壁,产生次品.已知管状模型内壁半径为R ,则管状模型转动的最低角速度ω为( )A.gR B . g 2R C.2g RD .2g R【解析】 最易脱离模型内壁的位置在最高点,转动的最低角速度ω对应铁水在最高点受内壁的作用力为零,即mg =mω2R ,得:ω=gR,A 正确. 【答案】 A[创新导向练]7.生活实际——圆周运动中的自行车问题雨天在野外骑车时,在自行车的后轮轮胎上常会粘附一些泥巴,行驶时感觉很“沉重”.如果将自行车后轮撑起,并离开地面而悬空,然后用手匀速摇脚踏板,使后轮飞速转动,泥巴就被甩下来.如图所示,图中a 、b 、c 、d 为后轮轮胎边缘上的四个特殊位置,则( )A .泥巴在图中a 、c 位置的向心加速度大于b 、d 位置的向心加速度B .泥巴在图中的b 、d 位置时最容易被甩下来C .泥巴在图中的c 位置时最容易被甩下来D .泥巴在图中的a 位置时最容易被甩下来【解析】 当后轮匀速转动时,由a =Rω2知a 、b 、c 、d 四个位置的向心加速度大小相等,A 错误.在角速度ω相同的情况下,泥巴在a 点有F a +mg =mω2R ,在b 、d 两点有F bd=mω2R ,在c 点有F c -mg =mω2R ,所以泥巴与轮胎在c 位置的相互作用力最大,容易被甩下,故B 、D 错误,C 正确.【答案】 C8.生活实际——通过“过山车”考查圆周运动最高点的临界问题如图所示甲、乙、丙、丁是游乐场中比较常见的过山车,甲、乙两图的轨道车在轨道的外侧做圆周运动,丙、丁两图的轨道车在轨道的内侧做圆周运动,两种过山车都有安全锁(由上、下、侧三个轮子组成)把轨道车套在了轨道上,四个图中轨道的半径都为R ,下列说法正确的是( )A .甲图中,当轨道车以一定的速度通过轨道最高点时,座椅一定给人向上的力B .乙图中,当轨道车以一定的速度通过轨道最低点时,安全带一定给人向上的力C .丙图中,当轨道车以一定的速度通过轨道最低点时,座椅一定给人向上的力D .丁图中,轨道车过最高点的最小速度为gR【解析】 在甲图中,当速度比较小时,根据牛顿第二定律得,mg -F N =m v 2R,即座椅给人施加向上的力,当速度比较大时,根据牛顿第二定律得,mg +F N =m v 2R,即座椅给人施加向下的力,故A 错误;在乙图中,因为合力指向圆心,重力竖直向下,所以安全带给人一定是向上的力,故B 正确;在丙图中,当轨道车以一定的速度通过轨道最低点时,合力方向向上,重力竖直向下,则座椅给人的作用力一定竖直向上,故C 正确;在丁图中,由于轨道车有安全锁,可知轨道车在最高点的最小速度为零,故D 错误.【答案】 BC9.高新科技——圆周运动中的运动学问题应用实例某计算机读卡系统内有两个围绕各自固定轴匀速转动的铝盘A 、B ,A 盘固定一个信号发射装置P ,能持续沿半径向外发射红外线,P 到圆心的距离为28 cm.B 盘上固定一个带窗口的红外线信号接收装置Q ,Q 到圆心的距离为16 cm.P 、Q 转动的线速度均为4π m/s.当P 、Q 正对时,P 发出的红外线恰好进入Q 的接收窗口,如图所示,则Q 每隔一定时间就能接收到红外线信号,这个时间的最小值为( )A.0.42 s B.0.56 s C.0.70 s D.0.84 s【解析】P的周期T P=2πr Pv=2π×0.284πs=0.14 s,同理Q的周期T Q=2πr Qv=2π×0.164πs=0.08 s,而经过的时间应是它们周期的整数倍,因此B项正确.【答案】 B10.科技生活——汽车后备箱升降学问汽车后备箱盖一般都配有可伸缩的液压杆,如图甲所示,其示意图如图乙所示,可伸缩液压杆上端固定于后盖上A点,下端固定于箱内O′点,B也为后盖上一点,后盖可绕过O 点的固定铰链转动,在合上后备箱盖的过程中()A.A点相对O′点做圆周运动B.A点与B点相对于O点转动的线速度大小相等C.A点与B点相对于O点转动的角速度大小相等D.A点与B点相对于O点转动的向心加速度大小相等【解析】在合上后备箱盖的过程中,O′A的长度是变化的,因此A点相对O′点不是做圆周运动,A错误;在合上后备箱盖的过程中,A点与B点都是绕O点做圆周运动,相同的时间绕O点转过的角度相同,即A点与B点相对O点的角速度相等,但是OB大于OA,根据v=rω,所以B点相对于O点转动的线速度大,故B错误,C正确;根据向心加速度a=rω2可知,B点相对O点的向心加速度大于A点相对O点的向心加速度,故D错误.【答案】 C[综合提升练]11.物体做圆周运动时所需的向心力F需由物体运动情况决定,合力提供的向心力F供由物体受力情况决定,若某时刻F需=F供,则物体能做圆周运动;若F需>F供,物体将做离心运动;若F需<F供,物体将做近心运动.现有一根长L=1 m的刚性轻绳,其一端固定于O 点,另一端系着质量m=0.5 kg的小球(可视为质点),将小球提至O点正上方的A点处,此时绳刚好伸直且无张力,如图所示.不计空气阻力,g取10 m/s2,则:(1)为保证小球能在竖直面内做完整的圆周运动,在A 点至少应施加给小球多大的水平速度?(2)在小球以速度v 1=4 m/s 水平抛出的瞬间,绳中的张力为多少?(3)在小球以速度v 2=1 m/s 水平抛出的瞬间,绳中若有张力,求其大小;若无张力,试求绳子再次伸直时所经历的时间.【解析】(1)小球做圆周运动的临界条件为重力刚好提供最高点时小球做圆周运动的向心力,即mg =m v 20L,解得v 0=gL =10 m/s. (2)因为v 1>v 0,故绳中有张力.根据牛顿第二定律有F 1+mg =m v 21L,代入数据得绳中张力F 1=3 N.(3)因为v 2<v 0,故绳中无张力,小球将做平抛运动,其运动轨迹如图中实线所示,有L 2=(y -L )2+x 2,x =v 2t ,y =12gt 2,代入数据联立解得t =0.6 s. 【答案】 (1)10 m/s (2)3 N (3)无张力,0.6 s12.(2018·山东潍坊高三上学期期中)如图所示,圆形餐桌中心有一半径为R 的圆盘,可绕穿过中心的竖直轴转动,圆盘与餐桌在同一水平面内且两者之间的间隙可忽略不计.当圆盘的角速度为 g 2R时,放置在圆盘边缘的小物体恰好滑上餐桌.已知小物体与餐桌间的动摩擦因数为0.25,最大静摩擦力等于滑动摩擦力,重力加速度为g.求:(1)小物体与圆盘的动摩擦因数;(2)小物体恰好不从餐桌滑落时餐桌的最小半径.【解析】(1)设小物体与圆盘间的动摩擦因数为μ1,小物体恰好滑到餐桌上时圆盘的角速度为ω0μ1mg=mω20R代入数据解得:μ1=0.5.(2)小物体从圆盘甩出时的速度v1=ω0R设小物体与餐桌间的动摩擦因数为μ2,小物体在餐桌上滑动距离x1恰不滑出桌面,0-v21=2ax1a=-μ2g餐桌的最小半径R min=R2+x21联立解得:R min=2R【答案】(1)0.5(2)2R。
物理模型与解题方法大全
物理模型与解题方法大全物理模型是指用来描述物理现象和问题的数学或几何模型。
它是一种抽象的描述方法,可以简化和理解复杂的物理问题,从而进行定量分析和预测。
解题方法是指根据所建立的物理模型,通过逻辑推理和数学方法求解问题的过程。
在物理教学和研究中,物理模型与解题方法是非常重要的,可以帮助人们更好地理解物理现象,准确预测实验结果,推动科学技术的发展。
物理模型的建立通常需要考虑实际物理现象的特点和规律,以及考虑到数学模型的可行性和简化程度。
常见的物理模型包括牛顿力学模型、电磁场模型、量子力学模型等。
牛顿力学模型是描述物体受力运动的数学模型,适用于大多数经典力学问题。
电磁场模型是描述电荷和电磁场相互作用的数学模型,适用于静电场、静磁场和电磁波等问题。
量子力学模型是描述微观粒子运动和相互作用的数学模型,适用于原子、分子等微观尺度的问题。
解题方法是基于建立的物理模型,通过逻辑推理和数学方法求解物理问题。
常见的解题方法包括物理定律的应用、数学模型的建立和求解、实验数据的处理与分析等。
例如,在力学问题中,可以通过牛顿第二定律和动能定理等物理定律,建立物体受力运动的数学模型,并通过微积分和代数方法求解物体的运动规律。
在电磁场问题中,可以通过麦克斯韦方程组建立电场和磁场的数学模型,并通过向量分析和微分方程求解电磁场的分布和变化规律。
物理模型与解题方法在物理学教学和科学研究中发挥着重要作用。
在教学中,通过引导学生建立物理模型和学习解题方法,可以帮助他们理解物理现象的本质和规律,提高科学素养和实践能力。
在科学研究中,科学家们通过建立合理的物理模型和运用有效的解题方法,可以对复杂的物理问题进行定量分析和预测,推动科学技术的发展。
总之,物理模型与解题方法是物理学中非常重要的概念和方法,它们可以帮助人们更好地理解物理现象,解决实际问题,推动科学技术的发展。
在教学和研究中,我们应该重视物理模型的建立和解题方法的培养,培养学生的科学素养和创新能力,推动科学技术的进步。
力学中四种模型的比较与例析

力学中四种模型的比较与例析
力学中常见的四种模型是:质点模型、刚体模型、弹性体模型和连续介质模型。
下面是它们的比较与例析:
1. 质点模型:
- 简化模型:将物体近似为质点,忽略物体的形状和大小,只考虑质点的位置和质量。
- 适用范围:适用于研究物体在非常短时间内的运动,或者物体的形状和大小对问题解答没有影响的情况。
- 例子:一个小球从斜面上滑下,可以用质点模型来分析小球的运动,忽略小球的大小和形状,只考虑小球的位置和质量。
2. 刚体模型:
- 简化模型:将物体看作刚体,忽略物体内部的形变和变形,只考虑物体整体的平移和旋转运动。
- 适用范围:适用于研究物体的平移和旋转运动,特别是对于刚体之间的碰撞和相互作用有很好的描述。
- 例子:两个碰撞的小球可以看作刚体,通过刚体模型可以分析它们之间的碰撞过程,例如碰撞后的速度和动量变化。
3. 弹性体模型:
- 简化模型:考虑物体内部的形变和变形,将物体看作具有弹性的材料,可以发生弹性变形。
- 适用范围:适用于研究物体的弹性变形和弹性力学性质,如弹簧的
拉伸和压缩等。
- 例子:一个弹簧被拉伸或压缩时,可以用弹性体模型来分析弹簧的形变和恢复力。
4. 连续介质模型:
- 简化模型:将物体视为连续的介质,假设物体的性质在空间上是连续变化的。
- 适用范围:适用于研究物体的流体力学性质,如流体的流动、压力和密度等。
- 例子:水流动时可以用连续介质模型来分析水流的速度和压力分布,忽略水分子的个体运动。
这些模型在不同情况下有不同的适用范围,选择合适的模型可以简化问题,使问题更容易解决。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
经典的两个物理建模方法
经典的物理建模方法有很多,下面列举了十个常见的方法:
1. 等效电路模型:用电路元件代替实际电子元器件,简化复杂的电路系统,以便进行分析和计算。
2. 球体模型:将物体或系统抽象为球体,通过对球体的运动、形状和相互作用的研究来分析物体或系统的行为。
3. 质点模型:将物体抽象为质点,忽略物体的形状和内部结构,仅考虑物体的质量、位置和运动状态,以简化问题的求解。
4. 力学模型:利用牛顿力学的基本定律,建立物体的受力和运动之间的关系,以预测和解释物体的运动行为。
5. 热传导模型:利用热传导定律,建立物体内部和外部温度分布的数学模型,以分析和预测热量的传递过程。
6. 流体力学模型:基于质量守恒、动量守恒和能量守恒定律,建立流体在各种流动条件下的数学模型,用于研究和解释流体的运动行为。
7. 电磁场模型:利用麦克斯韦方程组,建立电磁场的数学模型,以研究电磁波、电磁感应等现象。
8. 系统动力学模型:通过对系统内部元素之间相互作用和反馈机制
的建模,分析和预测系统的行为和演化趋势。
9. 光学模型:利用几何光学和波动光学的原理,建立光的传播和相互作用的数学模型,以研究光的行为和性质。
10. 量子力学模型:基于波粒二象性和薛定谔方程,建立微观粒子的数学模型,以研究微观粒子的行为和性质。
以上是十个常见的经典物理建模方法,它们在物理学的各个领域中发挥着重要的作用,帮助我们理解和解释自然界的现象和规律。