【文献综述】船舶舵机建模与航迹控制系统设计
船舶舵机控制系统改进设计【文献综述】

文献综述电气工程及其自动化船舶舵机控制系统改进设计引 言设计船舶自动操舵系统首先要确定船舶舵机的数学模型和船舶航行动态模型。
船舶舵机的传动机构主要有两类,机械传动和液压传动。
随着船舶排水量和航速的增加,舵机上的转矩迅速增大。
采用机械传动机构的舵机其重量和体积将变得很大,同时它的效率较低,电动机的容量势必很大。
因而目前大型船舶均采用液压传动舵机,甚至中小型船舶也不例外。
船舶舵机船舶舵机是能够转舵并保持舵位的装置。
舵机的大小由外舾装按照船级社的规范决定,选型时主要考虑扭矩大小。
船用舵机目前多用电液式,即液压设备由电动设备进行遥控操作。
有两种类型:一种是往复柱塞式舵机,其原理是通过高低压油的转换而作工产生直线运动,并通过舵柄转换成旋转运动。
另一种是转叶式舵机,其原理是高低压油直接作用于转子,体积小而高效,但成本较高。
船舶操舵系统是实现船舶操纵功能的一个自动控制系统。
它把电罗经,舵角传感器等送来的船舶实际航向信号,预定航向信号,及给定的各种限束条件自动地按照一定的调节规律进行信号处理,从而控制舵机,使船舶沿着给定的航向航行。
由此可见,该系统的性能直接影响着船舶航行的操纵性,经济性和安全性。
因此,船舶操纵系统的性能,一直被当作是一个具有较高经济价值和社会效益的重要问题,引起人们的关注。
并吸引着世界各国一代又一代的工程技术人员围绕着进一步改善该系统的性能这一课题而不断地进行研究和探索。
自动舵自动舵是根据电罗经送来的船舶实际航向与给定航向信号的偏差进行控制的。
在舵机投入自动工作时,如果船舶偏离了航向,不用人的干预,自动舵就能自动投入运行,转动舵叶,使船舶回到给定航向上来。
电动—液压式自动舵国产“HD—5L型自动舵应用半导体无触点控制的比例-微分-积分控制系统。
驾驶室具有自动、随动及应急操作三种操舵方式。
两套参数相同的放大器互为备用,通过转换开关选择其中一套为自动、随动操舵时使用。
应急操舵为随动控制方式,单独使用一套放大器。
舵机控制系统的模型建立与仿真

舵机控制系统的模型建立与仿真舵机控制系统是一种常用的自动控制系统,用于控制各种设备的转动角度或位置。
本文将介绍舵机控制系统的模型建立与仿真方法,并详细解释其原理和应用。
一、舵机控制系统的原理与结构舵机是一种具有反馈机构的执行器,主要由电机、减速器、位置传感器和控制电路组成。
其基本原理是通过电机驱动减速器转动,位置传感器测量减速器的转动角度,并将反馈信号传回控制电路。
控制电路根据期望角度和反馈信号之间的差异来控制电机的转动,从而实现对舵机位置的精确控制。
二、舵机控制系统的模型建立方法1. 机械部分建模舵机的机械部分主要由电机和减速器组成。
电机的转矩与转速之间存在非线性关系,需要使用电机的动力学方程进行建模。
减速器将电机的转速降低,并与位置传感器连接,通过测量减速器的转动角度来获取位置反馈信息。
2. 电子部分建模舵机控制系统的电子部分包括控制电路和位置传感器。
位置传感器的输出与舵机的转动角度成正比,可以使用比例关系进行建模。
控制电路负责接收期望角度信号和位置传感器的反馈信号,并根据差异来控制电机的驱动。
3. 综合建模将机械部分和电子部分建立的模型进行综合,得到完整的舵机控制系统模型。
可以使用系统的传递函数或状态空间模型来描述舵机的动态特性。
这些模型可以用于设计控制算法、参数调节和性能优化。
三、舵机控制系统的仿真方法舵机控制系统的仿真是通过计算机模拟实际系统的运行过程,以验证控制算法的有效性和系统性能。
以下是舵机控制系统的三种常用仿真方法:1. 基于物理模型的仿真基于物理模型的仿真是通过建立舵机的数学模型,使用物理量和控制算法进行仿真。
在仿真过程中,可以考虑各种因素对系统性能的影响,如摩擦、负载和环境扰动等。
这种仿真方法能够模拟系统的动态响应和稳态性能,常用软件包有Simulink和MATLAB等。
2. 基于控制算法的仿真基于控制算法的仿真是通过使用实时控制算法对舵机控制系统进行仿真。
在仿真过程中,可以对控制算法进行优化和调节,以提高系统的稳定性和响应速度。
船舶航迹控制研究综述

发展…………………………一
船舶航迹控制研 究综述
江苏镇 江比太 系统 工程有 限公 司 戚 爱春
跟踪、路径跟踪、直线航迹跟踪等问题 ,所得到的结果对于研 究船舶航迹控制问题具有一定指导意义。
【 关键词 】航迹控制 ;直线航迹
庄 肖波
【 摘要 】航迹跟踪控制是指在控制系统的驱动下 ,船舶从任意初始位置驶入预先规划好的航线 ,并沿此航 线最终抵达 目的地 。本文主要研 究了船舶航迹控制 问题 中的轨迹
如 图1 所示 ,航迹 大体上 可分为 四种 :大 洋上的航迹 一般属于第一 类航迹 ;当船 舶跟踪 包括转 向点在内的航迹 时,属于2 、3 类航 迹 ; 航迹3 往往是 在浅水 区航 行时采用 ;航迹 4 用于 基 于输入输 出线 性化 技术 ,并采用 重定义 采矿 、挖掘 等作业 。为确 保航行安全 ,通常在 输 出变量 的思 想,文 献 [ 3 ] 建立 了欠 驱动水 面 航迹两侧划 出一定 宽度 的偏差带作为 航迹跟踪 舰艇 直线航迹控制 系统 的非 线性数学模 型,并 的允许误差。 提 出了一种状态反 馈控制律 设计方法 。利用李 航迹 跟踪 问题可分 解为三 个 问题 : ( 1 ) 初 雅 普诺夫直接法进 行稳定性 分析 ,得到 了保证 始进入 时要 求快速 返 回航迹 : ( 2 ) 直线段 航迹 系 统全局渐近 稳定的充分条 件。数字仿 真和模 时要 求高精 度保 持航迹 : ( 3 ) 航迹 转 向点附近 拟 实验结果均表 明所提 出的充分条件 能够保证 的转 向问题 。下面 ,我 们将讨论几种 主要 的航 船 舶航迹控制 全局渐近稳 定,设计 的控 制律具 迹控制策略 。 有 比较理 想的控 制效 果。 2 . 船舶航迹控制策略综述 虽然上述文献 取得了较好 的成 果,但是它 2 . 1 T T 问题 们 都忽略 了欠 驱动水面舰艇 的横 向漂 移 。在考
船舶运动控制系统的建模与优化设计

船舶运动控制系统的建模与优化设计船舶运动控制系统是现代船舶自主导航的核心,其设计与优化对于船舶的安全性、航行效率、能耗等方面具有至关重要的作用。
本文将分别就船舶运动控制系统建模和优化设计两个方面进行探讨。
一、船舶运动控制系统建模船舶运动控制系统一般包括自动舵控系统和主机电控系统,二者在船舶航行中协同作用,保证船舶运动的稳定性和效率。
在进行船舶运动控制系统建模时,需要考虑船舶的船型、物理特性、环境因素等多个因素的影响。
1. 船舶运动模型船舶运动模型是船舶运动控制系统建模的基础,其模拟船舶在水中运动时的运动规律,根据不同的需要可建立包括六自由度运动模型、航迹追踪模型、动力学模型等。
其中,六自由度运动模型能够有效地描述船舶在海上的运动状态,包括横向剪切、姿态、滚转、俯仰等关键参数。
2. 自动舵控系统模型自动舵控系统模型用于描述自动舵控系统的工作原理和控制方法,其中自动舵的控制算法是关键。
常见的自动舵控制算法有PID控制、模糊控制、神经网络控制等。
3. 主机电控系统模型主机电控系统模型主要描述主机如何控制船舶的行进速度和方向,其关键要素是主机故障诊断、主机的动力学模型等。
同时,还需要对主机控制系统的回路进行建模、仿真。
二、船舶运动控制系统优化设计针对船舶运动控制系统的优化设计,主要关注船舶的航速、油耗、航迹精度等指标,同时还需控制船舶的纵横摇、螺旋桨汽蚀等不良因素。
1. 控制自动舵的响应速度自动舵的响应速度关系到船舶的稳定性,对其进行优化设计是提高船舶自主导航能力的关键之一。
具体做法包括调整舵机命令滤波时间常数、确定船舶航向的导引器位置、提高陀螺罗盘的稳定性等。
2. 优化主机控制策略合理的主机控制策略可以降低船舶的油耗、提高船速等指标,适当减小主机转速波动、改进主机排放等措施可以提高主机的控制精度。
3. 选用无侵入式传感器技术无侵入式传感器技术可以测量船舶关键参数,如船体振动、流场状态等,对船舶运动控制系统的优化设计具有重要的作用。
船舶自动控制及舵机系统的设计优化

船舶自动控制及舵机系统的设计优化一、引言航运作为世界贸易的主要方式之一,已成为全球经济发展不可分割的一环。
随着科技的不断进步和应用,船舶的自动控制和舵机系统的优化设计显得越来越重要。
本文将从船舶自动控制和舵机系统的设计优化两方面进行探讨。
二、船舶自动控制1. 船舶自动控制概述船舶自动控制是指通过计算机和电子技术实现对船舶自身的动力系统、舵机系统、导航系统等进行自动化管理和控制。
这种自动化控制系统能够使船舶在海上航行更加安全、稳定、高效。
2. 船舶自动控制的优点(1)提高航行安全性:船舶自动化控制系统能够监测船舶动力、水流等方面的数据,并及时作出调整,从而确保船舶在海上航行中不会出现危险情况。
(2)节省船舶人力资源:自动化控制系统不需要很多人手来操作,解放了一部分人力资源。
同时,自动化控制还能提高船员的工作效率和安全性。
(3)提高航行效率:船舶自动化控制系统能够根据航路和天气等信息,制定最优航行方案,这能够增加船舶行驶的速度并提高船舶的作业效率。
3. 船舶自动控制技术(1)船舶动力系统自动控制技术:船舶动力系统自动控制技术主要包括发动机控制、舵机控制和电缆控制等方面,通过计算机程序实现自动化控制。
(2)舵机系统自动控制技术:舵机系统自动控制技术主要是指利用计算机程序和传感器对舵机的运动轨迹进行控制。
(3)导航自动控制技术:通过利用卫星导航和高精度地图等技术,实现船舶在海上自主导航控制。
三、舵机系统的设计优化1. 舵机系统的基本原理舵机系统是船舶的主要控制装置,其作用是通过转动船舶舵轮实现对船舶方向的控制。
舵机系统由舵机、传动机构和控制装置组成。
在设计舵机系统时,应考虑到的因素包括舵机的扭矩、传动机构的总重量和总长度、控制信号的传输方式等。
2. 舵机系统的设计优化(1)舵机选型的优化:选用与所需扭矩最接近的舵机,可以实现最高效率的控制,并能大大降低成本。
(2)传动机构的优化:传动机构应尽可能精简,能够实现最佳的机械传动效率和稳定性。
船舶航向-舵/翼舵控制系统显示系统设计与实现
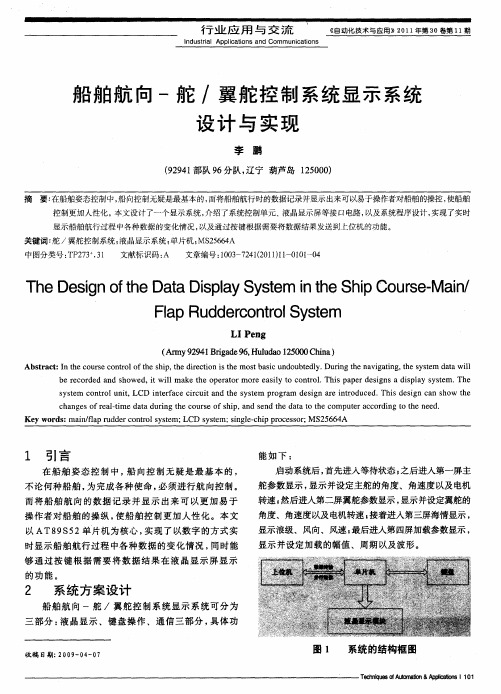
显示船 舶航 行过程中各种数据 的变化情 况 , 以及通过按键根据需要将数据结果发送到上位机 的功能 。
关键词 : /翼舵控制系统 ; 晶显示系统 ; 舵 液 单片机 ; 2 6 4 MS 5 6 A 中图分类号 : 2 3 . 1 TP 7 3 文献标识码 : A 文章编号 :0 3 7 4 (0 11 - 1 1 0 1 0 — 2 12 1 )1 0 0 - 4
船舶自动化导航控制系统设计与实现
船舶自动化导航控制系统设计与实现船舶自动化导航控制系统是指通过计算机、控制器、传感器等硬件组成的一套自动化控制系统,对船舶进行实时监控和管控,保证其安全、减少停航时间和节约船舶运营成本。
本文将从船舶自动化导航控制系统的介绍、设计、实现、应用及未来发展等方面进行探讨。
一、船舶自动化导航控制系统介绍传统的船舶驾驶是人工驾驶,这不仅耗时耗力,而且存在人员疲劳、技能差异、天气影响等诸多问题,但现代科技的发展解决了这些问题。
船舶自动化导航控制系统是实现船舶自主航行、自动控制的核心。
该系统通过集成控制器、传感器和计算机技术,对船舶的行进路线、速度和舵角进行自动化控制和调整,从而保证船舶正常安全行驶。
此外,船舶自动化导航控制系统还包括避碰预警、电子海图等多项功能。
二、船舶自动化导航控制系统设计船舶自动化导航控制系统的设计关键在于实现自主导航、避碰等功能。
具体而言,可利用船舶调速器,控制船舶的发动机输出功率,实现航速的自动控制;通过引入GPS全球定位系统、气象预报系统、雷达跟踪等技术,对船舶做出即时响应;利用电脑和传感器实现舵机和舵盘的自动化控制。
此外,为了提高船舶自动化导航控制系统的安全性,还需要引入姿态传感器、推进器控制器等技术实现船体姿态的自动监控和调整。
三、船舶自动化导航控制系统实现船舶自动化导航控制系统的实现必须结合具体的装置和设备。
在系统实现时,需要将控制器和传感器安装在各个关键处,通过多个通讯接口将其相互连接。
此外还需编写相应的软件,实现对船舶导航系统的监测和控制。
在具体的应用过程中,要根据不同的任务、环境等可变因素对船舶自动化导航控制系统进行不断地调整和优化。
四、船舶自动化导航控制系统的应用船舶自动化导航控制系统的应用范围非常广泛,全球很多船舶都已经采用了该系统。
其中,以中国大陆的码头作业船舶应用最为普及。
同时,航运集装箱的自动化系统也日益成为了未来发展的趋势。
船舶自动化导航控制系统实现了船舶航行的智能化,提高了船舶的安全性和整体运行效率。
浅谈航迹控制系统(TCS)设计
GUANGDONG SHIPBUILDING 广东造船2019年第4期(总第167期) 设计与研究作者简介:王志恩(1977-),男,硕士。
主要从事船舶电气设计工作。
苏珍莉(1983-),女,工程师。
主要从事船舶电气设计工作。
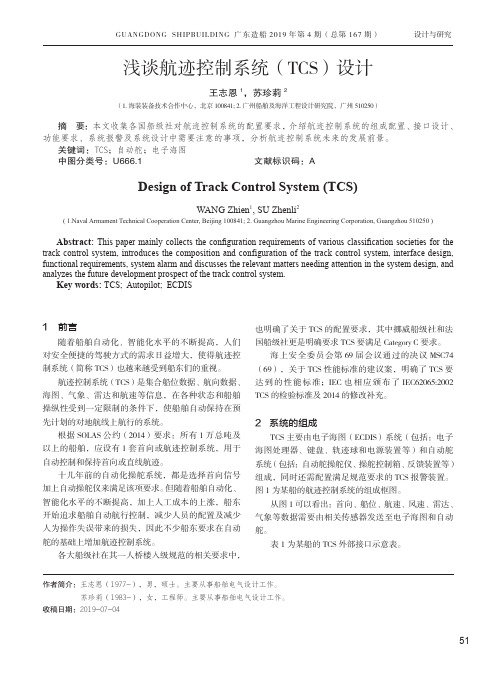
收稿日期:2019-07-04浅谈航迹控制系统(TCS)设计王志恩1,苏珍莉2(1.海装装备技术合作中心,北京 100841; 2.广州船舶及海洋工程设计研究院,广州510250)摘 要:本文收集各国船级社对航迹控制系统的配置要求,介绍航迹控制系统的组成配置、接口设计、功能要求、系统报警及系统设计中需要注意的事项,分析航迹控制系统未来的发展前景。
关键词:TCS;自动舵;电子海图中图分类号:U666.1 文献标识码:ADesign of Track Control System (TCS)WANG Zhien 1, SU Zhenli 2( 1.Naval Armament Technical Cooperation Center, Beijing 100841; 2. Guangzhou Marine Engineering Corporation, Guangzhou 510250 )Abstract: This paper mainly collects the configuration requirements of various classification societies for the track control system, introduces the composition and configuration of the track control system, interface design, functional requirements, system alarm and discusses the relevant matters needing attention in the system design, and analyzes the future development prospect of the track control system.Key words: TCS; Autopilot; ECDIS1 前言随着船舶自动化、智能化水平的不断提高,人们对安全便捷的驾驶方式的需求日益增大,使得航迹控制系统(简称TCS)也越来越受到船东们的重视。
船舶航迹舵控制技术研究与设计
船舶航迹舵控制技术研究与设计航迹舵在船舶的操纵系统中是不可缺少的设备。
对航迹舵的要求随着运行安全效益的提高也日益提高。
综合我国现有的经济因素以及现有的航行设备来看,文章提出了一些新的控制轨迹间接式的方法。
对于轨迹的控制是文章很重要的一部分。
新的轨迹控制法,也就是间接式的轨迹控制是根据原先轨迹控制的基本原理以及类型和计算航迹的基础上来实现的。
这种新的方法航迹的控制是通过控制其航向来实现的。
这种新的控制航迹的方法在航海方面具有很大的潜力。
标签:航迹控制;航迹舵;PID控制自动舵只是其俗称,全名是船舶自动操舵仪。
这个装备是根据发出的信号指令来进行控制航迹的。
它能代替人工的操作,并且能有效保证船舶在规定的航向上航行。
它的优点就是减少舵手劳动力,还能减少偏离值,从而使得航行时间的缩短,速度得到了相应的提高,便减少了燃料的燃烧。
能带来一定的经济效益。
自动舵的功能可以分为两种,一种是航向自动舵,还有另一种功能是航迹自动舵。
前者的具体功能是自动的保持或改变航向,减少偏值,而后者能够使船舶的航线航向得到更好的控制。
1 船舶操纵控制系统的现状以及发展在整个船舶的操纵系统中离不开自动舵,这是一个很重要的设备,主要的功能是控制船舶的航向,人们早在20世纪20年代就开始了对自动舵的研究工作。
到现在为止,自动舵一共经历了4个发展过程。
1.1 机械式自动舵德国的Aushutz和美国的Seprry早在1920年和1923年率先提出了关于机械式自动舵的研究方法。
这一设置是船舶自动舵的雏形,其方法是最原始的采用最简单的比例放大控制规律。
被历史称为第一代船舶自动舵。
1.2 PID自动舵经典理论在20世纪50年代发展成为顶峰,其中存在着多种的航迹控制方法。
此时的微分和积分在工业领域中得到广泛的应用。
积分控制也就是相关的PID 控制。
日本在1950年研究出了关于PID自动舵,被称为北辰自动舵。
后来美国在1952年研究出了新型的Seprry自动舵,都是采用PID来进行控制的。
船舶航迹舵控制技术研究与设计
智能控制, 分别是神经网络控制、 专家系统控制和 嘲控制。 2船 舶运 动控制仿真 的设计 要想设 计出有关于船 舶运动控制 仿真 ,就 必须 对这 方面有一 定 的 了解, 才能生产出有关于航迹 自 动舵的产品。只有通过好的实验再设计 出好的产品, 便能减少在海上的实验次数 , 从而节约了能源同时也使得 实验成本得到了降低, 使产品更快的开发出来。 设计仿真通常被应用到 船舶控制技术的研究当中去, 其仿真系统中一般存在着三种形式 , 是物 的控 制。 理、 单机和双机仿真。 1船舶操纵控制系统的现状以及发展 物理仿真是用试验船去代替真实的船去做船舶运动来进行各项实 在整个船舶的操纵系统 中离不开自动舵 , 这是一个很重要的设备, 验, 其中包括靠离码头 自 动化、 船舶运动控制器和自动操舵仪, 还有一 主要的功能是控制船舶的航向,人们早在 2 0 世纪 2 0 年代就开始了对 些其他 自动化方面的实验。双机仿真则是通过真实的船舶与运行船舶 自 动舵的研究工作。至 U 现在为止 , 自动舵一共经历了4 个发展过程。 数字模型的计算机相连, 这样就可以测试船舶控制器的控制效果。 单机 1 . 1 机 械式 自动舵 仿真则 只需要在一 台计算 机上来运行 船舶运 动的数字模 型和控 制器 的 德 国的 A u s h u t z 和美 国的 S e p r r y 早在 1 9 2 0 年和 1 9 2 3 年率先 提出 算法 , 因为这种方 法只需要 在计算机 上进行 。因此方法 相对简 单 , 且成 了关于机械式 自动舵的研究方 法。这一设置 是船舶 自动舵 的雏 形 , 其方 本低, 所以被大多数采用。 但是由于数学模型的精度不够还有海况真实 法是最原始的采用最简单的比例放大控制规律。被历史称为第一代船 性难以预料等难度, 单凭这一项研究结果也很难有可信度, 但是单机仿 舶 自动舵 。 真可 以当作一个初步 验证手段 。 1 . 2 P I D 自动舵 对比这三种船舶运动仿真系统 , 最简单是单 嘲肪真, 但这种方法只 经典理论在 2 0 世纪 5 0 年代发展成为顶峰,其中存在着多种的航 能给出初步结果。 而双机仿真为船舶控制器提供的是半物理仿真 , 相对 迹控制方法。 此时的微分和积分在工业领域中得到广泛的应用。 积分控 于单机仿真更接近实船的控制系统。最接近实船控制系统的是物理仿 制也就是相关的 P I D控制。日 本在 1 9 5 0 年研究出了关于 P I D自动舵 , 真, 所以物理仿真能得到更为真实 、 准确的数据 , 但是物理仿真系统需 被 称为 北辰 自动舵 。后来 美国在 1 9 5 2年研究 出了新型 的 S e p r r y自动 要 大量资金的投人 才能正常进行 。 舵, 都 是采用 P I D来 进行控制 的。 本来就有 的鲁 棒性 以及参 数易被调整 3航迹控 制研 究的有关 内容 和结构简单是 P I D自动舵所具有的特点。由此 P I D自动舵被广泛的认 操 纵船舶 的关 键设备便是 自动舵 。关于此方 法 的研 究工作在 国 内 可。 这种操作仪器几乎存在于所有的船舶当中。 因此被称为第二代 自动 已经有很多相关人员积极的参与,而且大多数的研究是根据船舶航迹 舵。 自动舵的预先演习来展开的。 精确地计算出航迹的该变量 , 还要能准确 1 . 3自 适应 自动舵 的控制航向舵 , 其最终 目的都是能精确地控制航迹。主要的研究内容有 自 适 应 自动舵有 两大类控制 设计 。第 一种是 可以根据 自我校 正的 以下三点 。 第一 建立在有风 、 浪还有 气流的影 响下 的 单机仿真机 完成相 原理来 设计的 。 第 二种是模 型的 自适应和参 考来进行 十 的。 模式 是由 关的船舶运 动模型 。第 二要设 计好航 向控 制器 。将 P I D技 术应 用到其 美 国麻 省理工 大学教授 根据在航 行过程 当中 出现的问题来 设计 的。 自 中, 以更好的运用 到间接式航迹控 制当中去 。 第 三分析控制航线 的可行 我校正 是 K a l m a n 在1 9 5 8 年根据相关 的研究提 出的 。那 时相关航 行理 性 , 并 且让其应用 到实际 当中去 , 设 计和仿真专家模 块的控制 。 论和技术都不够成熟,所以自 适应自动舵没有得到广泛应用。到了 7 0 总而言之, 由于海上运输这一事业的E l 益突出, 海上出现事故这一 年代人们意识到了自 适应 自动舵的优点,决定将关于 自 适应自动舵的 现象 也 E l 益 的突出 。尤其 针对那些大 型的游 轮和承载 了大量 的化学用 理论应用到实际的生活当中来。于是实际的船舶当中也都纷纷装上了 品 的船 舶 , 如果 一旦 出现 了事故 , 极大 的破 坏环境 造成 污染 , 事故 原 因 自 适应 自 动舵 , 于是便形成 了第 三代 自动舵 。 包括 了相关 人员操作 不当 , 还 有天气 的因素。所以这一 系列的问题就 要 1 4 智能 自 动舵 求自 动舵应具备的条件 , 能很好的控制航向, 研究 出即使是在有风有浪 由于传统的方法对于控制限维 、线性和时不变性具有一定的局限 还有天 气不好 的条件下也 能很好 的控制航 向 ,从而 控制 了船舶 的航行 性, 所 以就 要有新 的控制航线 方法 。因为在现实 航行 当中 , 其实 际船舶 轨迹。还应该要适应海上事业的发展速度 , 减少实验的次数 , 加快产品 系统具有不稳 定 、 不确定 以及复杂性 和非 线性 。 所 以很难 构成精确地 的产 生 , 从而节 约成本 。所 有这一 切有关 于航 迹控制 的研究 , 其 目的都 更安 全、 更科学 的生活 。 模 型方程 , 甚 至是 没有确定 的分 析式来表达 。 然 而 自适应 自动舵所具有 是为 了能够给人 们带 来更方便 、 参考文 献 的稳定性 应用 到实际 的航 行当 中时还不 能完 全的达 到要求 ,但 是舵手 1 ] 鞠世琼. 船 舶航 迹 舵控 制技 术研 究 与设 计叨. 哈 尔滨 工程 大 学, 2 0 0 7 具有很丰 富的有关 于这方面 的知识 , 还是 可以很好 的控 制航迹 。 所 以在 【 8 0 年代 , 人们就 开始研究有 关于这方 面的人工控制航迹 的方法 。 这种新 ( O 1 ) . 2 1 赵晴. 船舶航迹智能控制算法和研究 . 集美大学2 0 1 2 ( 0 4 ) . 的人工操 作舵就 是第 四代 新 自动 舵。现在 已经有 了三种关 于这方面 的 I
船舶智能导航控制系统的设计与实现
船舶智能导航控制系统的设计与实现近年来,船舶智能导航控制系统成为了航海业技术发展的新趋势。
这种高科技产品可以帮助船舶完成自主导航、实现避碰、自动化巡航等功能。
在这样一个信息时代,通过运用一系列的技术手段和计算机技术,船舶智能导航控制系统已经逐渐成为船舶领域的一大新兴技术领域。
一、船舶智能导航控制系统的概述船舶智能导航控制系统是船舶自主导航的核心系统,是更高效、更自动化、更精细化的运作模式。
该系统是基于先进的惯性导航和GPS技术,并结合高精度电子纵横向稳定系统、声学和雷达技术以及计算机控制系统等先进技术,可实现智能化自主导航、动态避碰、实时监控等多种功能,大大提高了船舶运行效率和船员的工作质量,同时还能有效减少人为操作失误和事故率。
二、船舶智能导航控制系统的设计与实现1.系统框架设计船舶智能导航控制系统的实现离不开系统框架的设计。
系统框架设计是指根据船舶智能导航控制的应用环境、功能需求、技术特点等因素,对智能导航控制系统进行整体规划和设计。
具体来说,系统框架设计包括系统分析和需求分析、系统结构和模块设计、系统数据处理和通信方式等方面的内容。
2.技术要点与难点船舶智能导航控制系统的设计和实现主要涉及以下技术要点与难点:(1)姿态感知技术:通过传感器获取船体姿态,并将其准确反映到导航控制系统中,以保证系统的精确性和稳定性。
(2)导航数据集成技术:通过将不同的导航数据源进行整合,并采用合适的算法进行数据融合,以提高导航控制系统的精度和准确性。
(3)船体自适应控制技术:通过船体反馈控制和传感器数据反馈自适应调整,实现船舶的自主控制和动态避碰。
(4)人机交互技术:通过合理设计界面、操作方式等,方便用户进行系统使用和管理。
3.实验环境构建为确保船舶智能导航控制系统的稳定运行,需要在实验环境中进行系统测试和验证。
需要注意的是,实验环境中应当模拟航行情况,比如海况、自然环境等因素。
同时,需要根据实验结果进行修正和调整,直到最佳的系统效果被达到。
船舶航迹控制研究综述_戚爱春

船舶航迹控制研究综述 江苏镇江比太系统工程有限公司 戚爱春 庄肖波【摘要】航迹跟踪控制是指在控制系统的驱动下,船舶从任意初始位置驶入预先规划好的航线,并沿此航线最终抵达目的地。
本文主要研究了船舶航迹控制问题中的轨迹跟踪、路径跟踪、直线航迹跟踪等问题,所得到的结果对于研究船舶航迹控制问题具有一定指导意义。
【关键词】航迹控制;直线航迹1.船舶航迹控制概述航迹跟踪控制是指在控制系统的驱动下,船舶从任意初始位置驶入预先规划好的航线,并沿此航线最终抵达目的地。
近年来,船舶航迹控制问题引起了学术界的广泛关注,并取得了较多的理论研究成果。
现存的大部分文献所提出的控制算法都依赖于精确的系统模型,且在建模过程中通常要进行适当的、合理的假设。
在对船舶航迹控制系统建模过程中,如果忽略船舶的横移以及流的干扰,则相应的船舶直线航迹控制问题比较容易解决,且能保证较好的控制性能;如果考虑船舶的横向漂移以及流的干扰,则相应的问题会比较复杂,且现有文献中的研究结果还不是很成熟[2]。
根据跟踪状态偏差与时间的关系,航迹跟踪可分为轨迹跟踪(Trajectory Tracking,TT)和路径跟踪(Path Following,PF)两大类[1]。
在实际航行中,大多数航迹跟踪控制都属于PF 问题,即不关心航速或时间。
TT问题要求系统在指定时间到达指定位置,而PF问题则是不考虑时间的几何位置跟踪。
根据航迹线的几何形状的不同,航迹跟踪控制问题又可以分为直线航迹跟踪控制和曲线航迹跟踪控制两大类。
如图1所示,航迹大体上可分为四种:大洋上的航迹一般属于第一类航迹;当船舶跟踪包括转向点在内的航迹时,属于2、3类航迹;航迹3往往是在浅水区航行时采用;航迹4用于采矿、挖掘等作业。
为确保航行安全,通常在航迹两侧划出一定宽度的偏差带作为航迹跟踪的允许误差。
航迹跟踪问题可分解为三个问题:(1)初始进入时要求快速返回航迹;(2)直线段航迹时要求高精度保持航迹;(3)航迹转向点附近的转向问题。
船舶智能导航与控制系统的设计与实现

船舶智能导航与控制系统的设计与实现随着科技的不断发展,船舶智能导航与控制系统在航行领域起到了至关重要的作用。
该系统结合了人工智能、传感器技术和自动控制等先进技术,能够实现船舶的智能化导航、自动化控制和安全保障。
本文将从系统设计和实现两个方面来探讨船舶智能导航与控制系统的相关内容。
一、系统设计在船舶智能导航与控制系统的设计过程中,首要考虑的是系统的整体架构和功能模块。
系统的架构应包含导航控制单元、感知模块和决策执行单元等关键模块。
导航控制单元负责船舶的航线规划和路径规划,可以根据实时的航行环境和用户要求进行决策;感知模块通过多种传感器对周围的海洋环境进行监测和感知,包括雷达、GPS、自主水声测距仪等;决策执行单元则负责根据导航控制单元的决策结果进行舵、推进器等船舶设备的控制。
其次,船舶智能导航与控制系统的设计还需考虑可靠性和安全性。
在船舶领域,安全始终是最重要的考虑因素之一。
系统需要具备实时监控和相应机制,以便在出现突发情况时及时采取应对措施。
此外,系统还应能自动识别并回避障碍物、避免碰撞,并对异常情况进行预测和预警。
最后,系统的设计还要充分考虑易用性和可扩展性。
在使用方面,系统应具备良好的人机交互界面,确保船员可以方便地控制和监测系统的运行状态;同时,系统还需要具备一定的可扩展性,以应对不同类型和规模的船舶需求。
二、系统实现船舶智能导航与控制系统的实现需要依托先进的技术手段和硬件设备。
首先,系统需要配备高精度的传感器,包括雷达传感器、GPS传感器、惯性导航系统等,以获取准确的船舶位置和环境信息。
其次,系统还需要借助计算机和网络技术,通过数据传输和分析来实现智能化的决策和控制。
此外,智能推进系统和舵机等船舶设备也需要与系统进行连接和协同工作。
在实现过程中,船舶智能导航与控制系统需要进行软硬件的深度融合,充分利用人工智能和控制算法来实现自主决策和控制。
例如,系统可以通过机器学习和模式识别算法,对海上的目标、障碍物和船舶动态进行学习和预测,通过优化控制算法来提高船舶的导航精度和安全性。
船舶智能操纵控制综述1

船舶智能摄纵控制综述张炎华鲍其莲【上海交通托学导航与控制研究所上海200030)擅耍随着对船舶航行要求的不断提高,船舶的自动舵系统已由PID舵发展到自适应舵,控制目标也由航向控制逐步发展到航迹控制。
自动舵的控制中不断引入新的控制方法如鲁棒控制、变结构控制等,井进一步向智能操舵系统发展.针对自动舵向智能舵的发展趋势.本文主要综述了包括模糊控制、神经舟络,遗传算法等智能技术及在船舶操纵控制中应用的研究现状.关t词智能控制自动舵船舶操纵1引言船舶操纵的根本目的,一是安全性,二是经济’陛,要达到这两个操纵目的.要求船舶沿着预定的航线航行,因此船舶自动舵是保障航行安全性与经济性的关键。
据有关研究资料显示,在所有的船舶事故中.约60%~70%的事故与船舶航行有关.主要原因是船舶航行的实际航线偏离了安全航线。
以往的自动舵.无论是PID舵还是自适应舵,由于定位导航技术发展水平的限制,基本上都是以航向控制为主.但由于风、浪、流等外界干扰的影响,以航向作为控制坐标有时无法保证船舶沿着预定航线航行。
随着现代航运业的不断发展.水上交通的繁忙以及内河船舶的自动航行的提出,控制目标由航向控制进一步扩展到航迹控制。
尽管关于航迹控制的文章很早就有发表。
也开展了有关的研究,但是直到九十年代.GPs系统的研究取得成果并投入使用以及其它相关技术的发展完善,解决了诸如垒球范围全天候连续精确定位等关键问题,航迹控制技术得到大量的研究.进一步随着廉价的GPs接收机的普及以及差分GPs技术的推广,开始实际应用到自动舵产品当中。
对船舶航行的精度要求的不断提高,对自动舵的控制方法也提出了新的要求,从采用传统的控制手段进一步发展为将控制理论与计算机技术的晟新成果引入自动舵的控制中,不断研制与开发新型自动舵。
自适应舵经过了二十多年的研究和发展。
自适应控制理论在船舶操纵中的应用。
已经逐步走向成熟,在各种自适应操舵仪产品中得到广泛的应用。
但无论是自校正自适应控制还是模型参考自适应控制,都是建立在受控对象为线性系统,且其阶数与时延己知的假设上的,而实际的船舶操纵过程却随船舶自身的工作状态(如载荷、吃水深度、航速等)及航行环境(如航线、水深、风、浪、流等)的不同而有很大的变化,是一个模型时变、非线性、大干扰的过程,所以应用传统的自适应控制不可避免地受到诸如鲁棒性等问题的困扰,从而影响了自适应舵的控制效果。
船舶自动控制与导航系统设计
船舶自动控制与导航系统设计船舶的自动控制与导航系统是船舶安全及航行效率的重要组成部分。
随着科技的发展和航行需求的提升,船舶自动控制与导航系统的设计变得更加关键。
本文将从自动控制和导航两个方面,探讨船舶自动控制与导航系统的设计要求、技术应用和未来趋势。
一、自动控制系统设计要求1. 航行稳定性和操控性:船舶的自动控制系统应能够保持航行稳定性,具备良好的操控性能。
通过准确感知环境,及时调整航向和速度,保持船舶稳定航行,减少航道占用,提高航行效率。
2. 环境感知和决策能力:船舶自动控制系统应具备远程感知环境的能力,包括海洋、气象、其他船舶等信息的获取与处理。
基于获得的信息,系统需要具备决策能力,进行正确的航行计划和路径规划。
3. 系统可靠性和安全性:自动控制系统应具备高可靠性和安全性,能够在各种环境条件下正常运行,并及时处理各种异常情况,如碰撞、机械故障等。
同时,系统应考虑到人机交互,提供友好的用户界面,方便船员监控和干预。
4. 能源利用和环保性:船舶自动控制系统应尽可能的优化能源利用,降低能源消耗。
同时,还应关注环保性能,减少船舶排放对海洋环境的影响,采用清洁能源进行航行。
二、导航系统设计要求1. 定位与导航准确性:船舶导航系统应具备高精度的定位能力,保证船舶在各种环境和条件下的准确导航。
采用全球卫星导航系统(GNSS)等技术,提供可靠的定位信息。
2. 预测和避碰能力:导航系统应具备预测和避碍其他船舶、障碍物的能力,以确保航行安全。
通过高精度定位、环境感知和航行规则等数据的融合处理,实现对潜在危险的预判和避免。
3. 航线规划和动态调整:导航系统应具备航线规划和动态调整的能力,根据航行目的、天气条件和其他因素,制定最优航线,并能够实时调整航线以适应变化的情况。
4. 多源数据融合:导航系统应能够融合多个数据源的信息,包括雷达、卫星图像、海洋气象数据等,提供更全面、准确的导航信息。
同时,系统还应具备处理大数据的能力,以提高导航决策的准确性和实时性。
船舶舵机系统的设计与建模研究

船舶舵机系统的设计与建模研究船舶舵机系统作为航行安全的保障之一,其设计和建模显得尤为重要。
船舶舵机系统不仅影响着船舶的稳定性和航行性能,而且还涉及到人员安全和船舶的经济效益。
本文将从舵机系统的概念入手,探讨舵机系统的设计和建模,旨在为相关领域的研究提供一些帮助。
一、舵机系统的概念舵机系统是自动控制装置,使用电信号控制船舶舵的转动,可以帮助船舶实现准确的转向和当场制动。
它通常包括舵机齿轮、电动机、滚珠丝杆、伺服阀和计算机控制单元等组成部分。
舵机系统的设计需要考虑船舶型号、船舶尺寸、船舶使用环境以及需要完成的任务,合理的舵机系统设计能够实现良好的船舶航行性能和控制准确性。
二、舵机系统的设计船舶舵机系统的设计可以分为机械结构设计和电气控制系统设计两个方面。
机械结构设计需要考虑舵机材料的选择、舵机机构的设计和优化等问题。
电气控制系统设计需要考虑电路的设计和优化、信号处理系统的设计和实现。
下面将分别介绍这两个方面的设计。
(一)机械结构设计在机械结构设计中,需要考虑如下几个方面。
1.舵机主体材料的选择:舵机主体材料的选择应考虑实用性、耐久性和重量等因素,以适应船舶的使用环境和性能要求。
2.舵机机构的优化设计:舵机机构的设计应优化设计,达到减少重量和空间占用的目的。
舵机的设计中也要考虑用途,例如海洋工程船需要对舵机进行特殊适应,以适应各种不同种类的工作需要。
3.舵机的自动化:舵机的自动化,包括机电一体化和智能化设计。
这种自动化可以加快控制系统的反应速度,使得船舶控制更加精确,从而提高航行安全性。
(二)电气控制系统设计在电气控制系统设计中,需要考虑如下几个方面。
1.电路的设计和实现:电路的设计和实现是舵机系统中最为重要的部分之一,其质量的好坏直接影响着舵机的控制效果。
在电路设计中,需要考虑电路器件的选择和安装,以及电流大小和电压稳定性等方面问题。
2.信号处理系统的设计和实现:信号处理系统的设计和实现可以大大提高舵机的控制效果和精度。
船舶舵机控制系统

船舶舵机控制系统章节一:引言船舶舵机控制系统是船舶自动化控制系统中的重要组成部分。
舵机控制系统通过对舵机的控制,实现船舶航向的调整和稳定。
舵机控制系统具有关键性功能,对船舶的操纵性和安全性具有重要影响。
本章将介绍船舶舵机控制系统的研究背景与意义。
首先,分析了船舶舵机控制系统在航海安全和船舶性能改善方面的重要性。
其次,介绍了目前船舶舵机控制系统的研究现状及存在的问题。
最后,阐述了本文的研究目的和内容,以及研究方法和论文结构。
章节二:船舶舵机控制系统原理本章将详细介绍船舶舵机控制系统的原理。
首先,阐述了舵机的基本工作原理以及其在船舶操纵中的作用。
然后,介绍了船舶舵机控制系统的基本构成和工作流程。
包括舵机操纵信号的生成、传输和控制,以及船舶航向的调整和控制过程。
最后,介绍了船舶舵机控制系统的性能指标和评价方法。
章节三:船舶舵机控制系统算法优化本章将研究船舶舵机控制系统的算法优化。
首先,分析了目前舵机控制系统中存在的问题和不足之处。
然后,介绍了一种基于XXXX算法的舵机控制系统优化方法。
该方法基于XXXX原理,通过优化舵机控制算法,提高舵机的响应速度和准确性。
最后,通过实验验证了该优化方法的有效性和可行性。
章节四:结论与展望本章对全文进行总结,并对未来的研究方向进行展望。
首先,总结了本文对船舶舵机控制系统的研究内容和方法。
然后,回顾了本文的研究成果和创新点。
最后,对船舶舵机控制系统的进一步研究方向提出了建议,包括算法优化、系统集成和智能化控制等方面的研究。
通过这些进一步研究,可以进一步提高船舶舵机控制系统的性能和稳定性,为船舶操纵和航行安全提供更好的支持。
全文总结了船舶舵机控制系统的研究背景和意义,详细介绍了船舶舵机控制系统的原理和工作过程,研究了舵机控制系统的算法优化方法,并对未来的研究方向进行了展望。
本文对船舶舵机控制系统的研究具有一定的参考价值,可为相关领域的研究和应用提供一些有益的思路和方法。
在船舶舵机控制系统的研究中,存在着一些挑战和问题。
船舶舵机控制系统的优化设计
船舶舵机控制系统的优化设计船舶在海洋中航行,舵机控制系统就如同船舶的“方向盘”,其性能的优劣直接关系到船舶的航行安全和操控性能。
随着船舶技术的不断发展,对舵机控制系统的要求也越来越高。
为了提高船舶的操纵性、稳定性和可靠性,优化舵机控制系统的设计变得至关重要。
一、船舶舵机控制系统的基本原理与组成船舶舵机控制系统主要由舵机、传感器、控制器和执行机构等部分组成。
舵机是将电能转化为机械能,驱动舵叶转动的装置;传感器用于检测船舶的航向、航速、舵角等参数,并将这些信息反馈给控制器;控制器则根据传感器的反馈信号,按照预定的控制算法计算出控制指令,驱动执行机构调整舵叶的角度,从而实现对船舶航向的控制。
在传统的船舶舵机控制系统中,通常采用PID(比例积分微分)控制算法。
PID控制算法简单易懂、易于实现,但在面对复杂的海洋环境和船舶动态特性时,其控制性能往往难以满足要求。
例如,在船舶受到风浪等干扰时,PID控制可能会出现超调量大、响应速度慢等问题,影响船舶的操纵稳定性。
二、现有船舶舵机控制系统存在的问题1、控制精度不足由于船舶在航行过程中受到多种因素的影响,如水流、风浪、负载变化等,现有的舵机控制系统在控制精度方面存在一定的不足,导致船舶的航向偏差较大,影响航行安全和效率。
2、响应速度慢在紧急情况下,如避让障碍物或应对突发海况,现有的舵机控制系统可能无法迅速响应,导致船舶的操纵灵活性下降,增加了潜在的危险。
3、抗干扰能力弱海洋环境复杂多变,风浪、水流等干扰因素对船舶的影响较大。
现有的舵机控制系统在抗干扰能力方面表现不佳,容易受到外界干扰的影响,使船舶的航向发生较大的波动。
4、可靠性有待提高船舶在海上航行时间长,工作环境恶劣,舵机控制系统的零部件容易出现故障。
现有的系统在可靠性设计方面存在不足,一旦出现故障,可能会导致船舶失去控制,造成严重的后果。
三、船舶舵机控制系统的优化设计思路为了解决现有船舶舵机控制系统存在的问题,提高系统的性能,需要从以下几个方面进行优化设计:1、先进控制算法的应用采用现代控制理论中的先进控制算法,如模糊控制、神经网络控制、自适应控制等,取代传统的PID控制算法。
船舶航行控制系统的设计

船舶航行控制系统的设计在现代航海领域,船舶航行控制系统的设计至关重要。
它就像是船舶的“大脑”,指挥着船舶在茫茫大海中安全、高效地行驶。
一个出色的船舶航行控制系统不仅能够提高航行的准确性和稳定性,还能保障船舶的安全,降低船员的工作强度,提升运输效率。
船舶航行控制系统的组成部分众多,包括导航系统、动力控制系统、转向控制系统等等。
导航系统就如同船舶的“眼睛”,为船舶提供准确的位置、航向和速度等信息。
常见的导航设备有全球定位系统(GPS)、北斗卫星导航系统、惯性导航系统等。
这些导航设备通过接收卫星信号或者利用自身的传感器,实时计算船舶的位置和运动状态,并将这些信息传递给控制系统。
动力控制系统则负责调节船舶的动力输出。
船舶的动力来源主要有内燃机、电动机或者两者的组合。
动力控制系统需要根据航行的需求,如加速、减速、巡航等,精确地控制发动机或电动机的转速、扭矩等参数,以实现船舶的动力调整。
转向控制系统就像是船舶的“方向盘”,它控制着船舶的转向角度和方向。
现代船舶的转向系统通常采用液压或者电动助力的方式,通过传感器感知船舶的转向需求,然后由控制系统驱动转向机构,实现船舶的灵活转向。
在设计船舶航行控制系统时,需要充分考虑船舶的特性和航行环境。
不同类型的船舶,如货船、客船、油轮等,其航行要求和特点各不相同。
货船通常更注重运输效率和经济性,而客船则更关注舒适性和安全性。
此外,航行环境也是一个重要的因素。
海洋中的风浪、水流、水深等都会对船舶的航行产生影响。
因此,控制系统需要具备良好的适应性和鲁棒性,能够在各种复杂的环境下稳定工作。
为了实现精确的控制,船舶航行控制系统采用了多种先进的技术和算法。
例如,PID 控制算法(比例积分微分控制算法)在船舶控制中得到了广泛的应用。
它通过对偏差的比例、积分和微分运算,来计算控制量,从而实现对船舶的精确控制。
此外,模糊控制、神经网络控制等智能控制算法也逐渐被应用到船舶航行控制中,以提高控制系统的性能和适应性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
文献综述电气工程及其自动化船舶舵机建模与航迹控制系统设计1.引言船舶自动操舵仪,俗称“自动舵”,是根据指令信号自动完成操纵舵机的装置,是一个重要的船舶控制设备。
它能代替舵手操舵,保证船舶在指令航向或给定航迹上航行。
自动舵在相同的航行条件下,不仅可以减轻驾驶员的工作,而且在远航时,可以减少偏航次数,减小偏航值。
因而可以提高实际航速,缩短航程的航行时间,节省燃料,提高航行的经济效益。
一般说来,自动舵按控制功能可分为两类:一类是航向自动舵,保证船舶自动跟踪指令航向,实现自动保持或改变航向的目的;另一类是航迹自动舵,控制船舶沿计划航线航行。
由于航迹自动舵具有控制船舶精确的航行轨迹的功能,它将是自动舵未来的发展方向。
航迹控制一直是船舶运动控制的重点研究对象。
由于国内起步较晚,与国外先进水平相比仍[]2有较大的差距。
主要表现在:(l)航向舵仍占据主导地位,航迹舵产品尚未成熟的,更不用说自动航行系统和综合船桥系统。
(2)在控制理论上,虽然国内有些专家提出了一些控制方法,也解决了一些问题,但由于船舶操纵运动数学模型存在非线性问题、操舵执行机构存在滞后问题以及船舶航行环境和所受干扰的不确定等问题,使得一些建立的数学模型的控制方法无法得到正常实现。
据国内外有关研究证明,船舶智能控制能解决上述问题。
因此,将智能控制理论用于自动舵,改进我国的自动舵性能是一项迫切的任务。
2.国内船舶自动舵的研究概况[]2自动舵发展的大致经历:第一代是以继电器机械结构为代表;第二代是以电子管磁放大器为核心控制部件为代表;第三代是以半导体、线性运行放大器为核心控制部件为。
1921年德国安修斯公司发明了自动舵,即利用罗经的电讯号,通过继电器、机械结构来实现控制电动舵机。
1930年苏联也相继研究出以电罗经为航向接收讯号的自动舵。
我国对自动舵系统的研究相对国外起步比较晚,从二十世纪50年代开始以仿造苏联自动舵,其自动舵是磁放大器为控制核心。
到了60年代末才自行研制成功以半导体分立元件为核心的自动舵典型产品。
70年代末才开始把线性运算放大器技术,运用到PID自动舵中。
自80年代以来,有关单位对自适应舵深入研究,发表了一些设计方案,仿真研究结果和产品。
1980年,袁著社、卢桂章老师采用Norrbin性能指标,设计了船舶航向保持的自适应舵,发表了仿真结果报告;1984年,林钧清老师利用最小方差自校正调节器设计了自适应自动舵的软件,发表了仿真研究报告;1986年,大连海事大学陆样润、黄义新等老师采用了对偏航速率进行加权的最小方差自校正控制方法,进行了自适应舵的研制并且用“育红”轮在海上进行了实船实验。
试验结果表[]2明,该自适应舵比PID舵具有更好的控制效果。
到目前为止只有少数经济发达的资本主义国家掌握了航迹航向自动舵的软件设计与实现这项技术,并形成名牌产品。
我国产品主要用于国内的内河与近海船舶,很少为出口船舶配套,大多数国产自动舵仅仅具有航向控制功能且燃油经济性不佳。
目前国外自动舵已向数控和自适应技术相结合方向发展。
大多数产品基本具有航向控制和航迹控制功能,节省燃油的效果明显。
综合国内外有关航向、航迹控制产品的研究现状,可以总结出:一方面PID自动舵由于其高强度稳定性及简易操作等特点,受到航海界人士的信赖,仍然占据主导地位;另一方面,航向、航迹控制中不断的运用到各种新兴的控制理论。
近几年发展起来的智能控制及其它近代控制的在自动舵上的应用尚处于实验仿真阶段,还有待于深入工程实现研究。
3.船舶操纵技术的发展船舶操舵系统是自动控制理论在工业生产中应用的产物。
自动舵按照控制算法发展可以划分[]3为四个阶段:德国的Aushutz和美国的Sperry,分别于1920年和1923年率先独立研制成了机械式的自动操舵仪。
该产品是自动舵的雏形,所采用的是经典控制理论中最简单最原始的比例放大控制规律。
它的出现是个里程碑。
这种自动舵被称为第一代自动舵。
五十年代,随着电子学和伺服机构的发展及应用,集控制技术和电子器件的发展成果于一体的第二代自动操舵仪问世了,这就是PID 舵。
由于船舶运动特性随航速、载荷、吃水差及水深等因素变化而变化,扰动特性也随海浪、风、流等海况变化而不同,因此,船舶航向控制的数学模型与扰动模型具有明显的不确定性。
第三代是自适应自动舵。
二十世纪六十年代末,随着计算机技术和自适应理论的发展,瑞典等北欧国家的一大批科技人员纷纷将自适应舵应用到实船上,这就形成了第三代自动舵。
自适应舵在提高控制精度、减少能耗方面取得了一定的成绩,但物理实现成本高、参数调整难度大,尤其是船舶的非线性和不确定性使得控制效果难以保证,影响系统的稳定性。
第四代是人工智能自动舵,传统的控制方法对有限维、线性和时不变的控制过程是非常有效的。
由于实际船舶系统常具有不确定性、非线性、非稳定性和复杂性,很难建立精确的模型方程,甚至不能直接进行分析和表示。
随着计算机及计算机网络的飞速发展和广泛应用,这促使自动控制与人工智能两个学科交叉融合,形成了智能控制这一新的学科。
智能控制自动舵采用的智能控制手段主要包括神经网络控制技术、专家控制技术、模糊控制技术以及遗传算法等优化技术。
4.模糊控制1965年Zadeh创立了模糊集理论并得到较快的发展和实际的应用,成为智能控制领域中的一个重要分支。
上世纪七十年代中期,以Mamdani为代表的一批学者提出了模糊控制的概念,这标志着模糊控制的正式诞生。
其基本思想是把人类专家对特定的被控对象或过程的控制策略总结成一系列的以:if和then的形式表示的控制规则,通过模糊推理得到控制作用集,作用于被控对象。
近年来模糊逻辑理论在船舶上的应用得到发展,Sutton和Jess于1991年提出了一种自适应模糊自动舵理论。
这个方法是观察操作环境以及在环境中模糊控制器所受的影响,能够被接受的性能指标存储到一个矩阵形式中形成控制规则。
Layne于1993年又提出了模糊模型参考自学习控制器它在环境受到干扰(风,浪,流)的情况下模拟船舶驾驶,此种学习机制的作用一是从模糊控制系统观察数据;二是学习当前性能特征;三是对模糊控制器进行自动合成和调节;四是对模糊控制器进行自动合成和调整。
模糊控制系统由模糊化、模糊推理、反模糊化三部分组成。
模糊控制应用于船舶控制就是根据航向偏差、偏差变化率两个输入量,经过模糊控制器运算给出舵角指令,再经过随动系统和执行机构作用于操舵装置,从而使船舶回到设定航向或航迹。
模糊控制与常规控制相比有以下优点:模糊控制完全是在操作人员控制经验基础上实现对系统的控制,无须建立数学模型;模糊控制具有较强的鲁棒性,被控对象参数变化的影响不明显,可用于非线性、时变、时滞系统的控制,由离线计算控制查询表,提高了控制系统的实时性。
当然,模糊控制也有其缺陷:信息、简单的模糊处理将导致系统的控制精度降低和动态品质变差。
拎制规则的选择、论域的选择、模糊集的定义和量化因子的选取等多采用试凑法,这对复杂系统的控制是难以奏效的。
常规模糊控制的两个主要问题在于改稳态控制精度和提高智能水平与适应能力。
因此纯粹的模糊控制器运用在自动舵的研究中并不广泛。
在实际应用中,往往是将模糊控制或模糊推理的思想,与其它相对成熟的控制理论或方法结合起来,发挥各自的长处,从而获得理想的控制效果。
模糊规则和语言很容易被人们广泛接受,加上模糊化技术在微处理器和计算机中能很方便的实现,所以这种结合展现出强大的生命力和良好的效果。
对模糊控制的改进方法可大致的分为模糊复合控制,自适应和自学习模糊控制,以及模糊控制与智能化方法的结合等三个方面。
总结本文首先介绍了船舶舵机和航迹控制系统研究的背景和意义,再综合国内外自动舵发展史和航迹控制的研究,考虑到了模糊控制理论和PID控制方式的结合控制。
参考文献:[1]李长喜.不完全驱动船舶直线航迹控制系统的研究和设计[D].杭州:浙江工业大学,2008:1-7[2]张仁丹.船舶航迹控制技术研究[D].哈尔滨:哈尔滨工程大学,2010:1-5[3]蒋丹东.船舶航迹控制[D].大连:大连海事大学,1997:25-30[4]孔庆峰.船舶舵机建模与航迹舵系统研究[D].哈尔滨:哈尔滨工程大学,2009:51-64[5]徐建辉.混合智能在船舶航迹控制中的应用[D].上海:上海海事大学,2006:50-52[6]鞠世琼.船舶航迹舵控制系统研究与设计[D].哈尔滨:哈尔滨工程大学,2007:2-6[7]狄猛.基于性能评价的船舶自动舵控制器设计研究[D].上海:上海交通大学,2008:30-33[8]李铁山,杨盐生,郑云峰.不完全驱动船舶非线性控制[J].交通工程学报,2003(4):30-40[9]杨盐生.船舶运动控制研究[J].交通运输工程学报.2003(2):25-30[10]周岗,周永余,陈永冰.基于模糊理论的舰船航迹控制器[J].海军工程大学学报,2000(3):47-50[11]张显库,蒋丹东,贾欣乐.船舶自动舵的研究[J].大连海事大学学报,1997,23(1):7-10[12]徐海彬,鲍其莲,张炎华.PID自动舵的自整定专家系统[J].船舶工程,2004,26(3):60-63[13] K. D. Do. Universal controllers for stabilization and tracking of under actuated ships [J].Systems control Letters, 2002(47):299-317[14] Ming- Chung Fang. On the track keeping and roll reduction of the ship in random waves [J].Ocean Engineering, 2007(34):479-489[15]M. Santos. A neuro fuzzy approach to fast ferry vertical motion model [J]. Engineering Applications of Artificial Intelligence, 2006(19):313-321。