三维图像处理系统组成及实现方案
ORS Dragonfly图像处理与三维重建软件功能介绍及应用
图像处理 成像系统无法摆脱伪影。Dragonfly 的图像处理工具可供用户减轻图像伪影并恢复图像清晰度,
因此重要的图像信息可以显示出来。业界领先的图像过滤器和无限制的可扩展性以及机器学习功能使 用户能够生成具有清晰特征的定量图像。
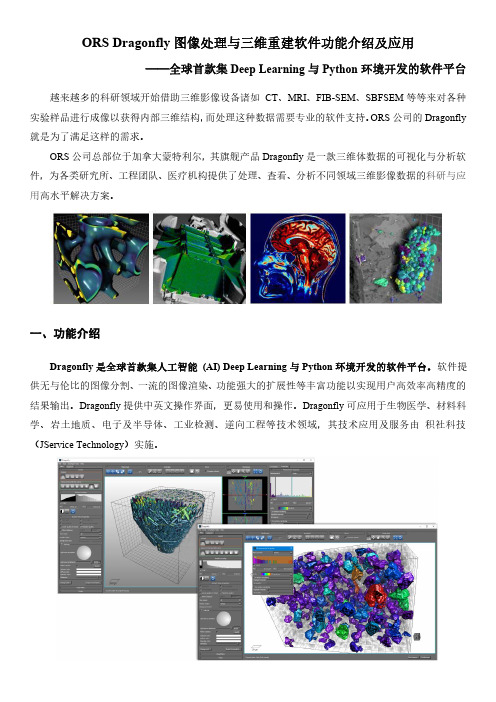
ORS 公司总部位于加拿大蒙特利尔,其旗舰产品 Dragonfly 是一款三维体数据的可视化与分析软 件,为各类研究所、工程团队、医疗机构提供了处理、查看、分析不同领域三维影像数据的科研与应 用高水平解决方案。
一、功能介绍
Dragonfly 是全球首款集人工智能 (AI) Deep Learning 与 Python 环境开发的软件平台。软件提 供无与伦比的图像分割、一流的图像渲染、功能强大的扩展性等丰富功能以实现用户高效率高精度的 结果输出。Dragonfly 提供中英文操作界面,更易使用和操作。Dragonfly 可应用于生物医学、材料科 学、岩土地质、电子及半导体、工业检测、逆向工程等技术领域,其技术应用及服务由 积社科技 (JService Technology)实施。
二、高级功能
可扩展性—Dragonfly 的 Python 集成* 用户可以直接在应用程序中执行和访问 Dragonfly 数据对象的 Python 脚本,并利用 Python 生态
系统中免费提供的强大图像处理算法构建用户自己的插件。 Dragonfly 全面的 Python 控制台可以轻松执行工作流程,以便您完全能将软件带到任何可以用到
图像渲染 Dragonfly 具有增强显示效果的功能。在这里,深度感知与高度衍变的色彩感知相结合。对图像
激光三维扫描图像处理算法及DSP的实现

g i h he-i nin C odnts ifr t n o h bet I d io ,i ao t TI MS 2 C 0 0 D P a te tredmes o riae nomai fte o jc. n a dt n t d ps ’ T 3 0 60 S n o o i S
d l ina d l e e me t aac mp n ain i cng t na p o i t t - i n i o t u i f be t t eeo e e t n n g n t o e s t , t a e a p rxma e wodme s nC no r n o jc , h rf r eo i s d o o L e o
( olg f rc inIsrmet n t- lcrnc n ier g Ti j ies y Ti j 0 0 2 C l e0 eio ntu n dOpoE eto i E gn ei 。 a i Unv ri 。 a i 3 0 7 ) e P s a s n nn t nn
wel sa clrtn h p e fp o e sn g aa l a ceeaig t es e o rc s ig i d ma ed t.
Ke wo d :DS i g r c s i g ls r3 s a n r y rs P m e p o e sn a e - D c n e a
维普资讯
蛾
ETN MSEN术HIY LRI 子 RE C0 EO电E 量技T N) C C A MT 测 U E G
第81 2年1 0 月 3第 0 1 期 卷
激 光 三 维 扫 描 图像 处 理 算 法及 DS P的 实现 *
孙哲明 葛宝臻
展厅360全息+投影融合解决方案

第一部分360度全息投影系统方案一.概述360度全息投影系统简称360全息,也称360度全息成像、三维全息影像、全息三维成像。
360全息是由透明材料(玻璃或者透明有机板)制成的四面锥体,通过四个视频源在锥体上边或者下边投射到锥体中的特殊棱镜上,根据光学原理,汇集到一起后形成具有真实维度空间的立体影像。
360度全息投影系统主要是由柜体,分光镜面,成像锥体,图像投影和图像处理器五部分组成,对产品进行实拍和构建三维模型,再用电脑数字处理制作成360度旋转动画,通过图像投影设备将动画投射到分光镜面上,再折射到四个面的成像锥体上边,形式360度立体成像,参观者可以360度参观产品,不需要佩戴任何偏光眼镜,在完全没有束缚下就可以尽情观看3D幻影立体显示特效,给人以视觉上的强烈冲击,是一种科技含量高,新颖性强,广受大中型展馆欢迎的多媒体展项。
二.特点360全息特点:1.柜体时尚美观,有科技感。
顶端四面透明,真正的空间成像色彩鲜艳,对比度,清晰度高;具有空间感,透视感。
2.参观者可以360度参观产品,不需要佩戴任何偏光眼镜,可以尽情观看3D幻影立体显示特效。
3.可以结合实际物体,形式空中幻象,实现影像与实物结合,增强产品广告宣传效果。
4.占用空间比较小,可以根据要求定制。
5.灵活性比较强,通常是4个面,也可以做3个面或者2个面。
三.三维全息影像的优越性1.尺寸灵活——360全息系统硬件设备分为成像区与工作区两部分,成像尺寸由1.2M至12M,可根据不同的应用需求进行尺寸选择。
2.安装便捷——360全息系统能根据现有的建筑或安装位置空间来修改硬件的体系和结构,有利于在各种建筑和城市空间里永久安装。
3.内容多样——360全息系统可根据需求随时更换数字内容。
四.环境要求360全息对环境亮度有一定要求,避免强光高亮度,亮度越暗效果越好。
五.原理360全息是制作好的产品动画通过图像投影设备投射到分光镜面上,基于分光镜成像原理,动画折射到成像锥体上边,形式360度立体成像,参观者可以360度参观产品,不需要佩戴任何偏光眼镜。
DSP+FPGA 多种设计方案

1,DSP+FPGA 实时信号处理系统2,FPGA+DSP实时三维图像信息处理系统3,采用FPGA+DSP结构的多通道高速数据采集与实时图像处理系统的设计与实现方案4,基于DSP与FPGA的蓝牙数据采集系统设计5,基于DSP和FPGA的通用图像处理平台设计6,基于FPGA+DSP的实时图像处理系统设计与实现7,基于DSP的实时图像目标搜索与跟踪系统设计1,DSP+FPGA 实时信号处理系统实时信号处理系统要求必须具有处理大数据量的能力,以保证系统的实时性;其次对系统的体积、功耗、稳定性等也有较严格的要求。
实时信号处理算法中经常用到对图象的求和、求差运算,二维梯度运算,图象分割及区域特征提取等不同层次、不同种类的处理。
其中有的运算本身结构比较简单,但是数据量大,计算速度要求高;有些处理对速度并没有特殊的要求,但计算方式和控制结构比较复杂,难以用纯硬件实现。
因此,实时信号处理系统是对运算速度要求高、运算种类多的综合性信息处理系统。
1信号处理系统的类型与常用处理机结构根据信号处理系统在构成、处理能力以及计算问题到硬件结构映射方法的不同,将现代信号处理系统分为三大类:·指令集结构(ISA)系统。
在由各种微处理器、DSP处理器或专用指令集处理器等组成的信号处理系统中,都需要通过系统中的处理器所提供的指令系统(或微代码)来描述各种算法,并在指令部件的控制下完成对各种可计算问题的求解。
·硬连线结构系统。
主要是指由专用集成电路(ASIC)构成的系统,其基本特征是功能固定、通常用于完成特定的算法,这种系统适合于实现功能固定和数据结构明确的计算问题。
不足之处主要在于:设计周期长、成本高,且没有可编程性,可扩展性差。
·可重构系统。
基本特征是系统中有一个或多个可重构器件(如FPGA),可重构处理器之间或可重构处理器与ISA结构处理器之间通过互连结构构成一个完整的计算系统。
从系统信号处理系统的构成方式来看,常用的处理机结构有下面几种:单指令流单数据流(SISD)、单指令流多数据流(SIMD)、多指令流多数据流(MIMD)。
pacs方案

pacs方案简介PACS(Picture Archiving and Communication System)是一种用于医学图像的存储、检索、传输和显示的系统。
它的任务是将医学图像和相关数据进行数字化,并在医疗机构内部或跨机构中共享和传输。
PACS方案主要由两大部分组成:图像获取设备和图像存储管理系统。
本文将对PACS方案的功能、架构和实施流程进行详细介绍。
功能PACS方案的主要功能包括以下几个方面:1.图像获取和存储:通过各类医学图像设备(如CT、MRI等)获取图像数据,并将其存储到PACS系统中。
图像数据可以是传统的二维图像,也可以是三维、四维图像。
2.图像传输和共享:PACS系统可以实现图像数据的远程传输和共享。
通过网络,医生可以远程访问和查看患者的图像数据,从而提供诊断和治疗的支持。
3.图像检索和管理:PACS系统提供了强大的图像检索和管理功能,医生可以根据患者信息(如患者ID、姓名、日期等)或图像特征(如器官、病变等)进行检索和浏览。
4.图像显示和分析:PACS系统提供了多种图像显示和分析工具,医生可以对图像进行放大、缩小、旋转等操作,同时还可以利用图像分析算法进行自动诊断。
5.安全和隐私保护:PACS系统采用多层次的安全措施,包括身份验证、数据加密和访问控制等,以保护患者的隐私和保密性。
架构PACS方案的典型架构由以下几个组件组成:1.图像获取设备:包括各类医学图像设备,如CT、MRI、超声等。
它们负责将采集的图像数据进行数字化,并通过网络将数据发送到PACS系统。
2.PACS服务器:是PACS系统的核心组件,用于存储、管理和传输图像数据。
PACS服务器由图像存储和图像管理两部分组成。
3.图像存储:负责存储和管理图像数据,包括接收图像数据、进行数据压缩和加密、进行存储和备份等操作。
4.图像管理:负责图像的索引、检索和传输,包括对图像数据进行标记和分类、提供图像检索接口和图像传输接口等。
xxxx重点部位--实景三维建模技术方案

Xxxxx 重点安保部位无人机实景三维建模技术方案目录1 概述 (2)1.1 项目概述 (2)1.2 项目内容 (2)1.3 作业区概况 (2)1.4 引用文件 (3)2 技术方案 (4)2.1 高分辨率倾斜航空影像采集 (5)2.2 高精度像控点采集 (14)2.3 全自动空三及自动建模 (19)2.4 三维模型场景精细化处理 (24)3 成果质检 (35)3.1 质量保障体系 (35)3.2 质量控制方案 (36)1 概述1.1项目概述本方案旨在使用基于无人机倾斜摄影测量的实景三维建模技术,对xxxxxxxx进行外业航飞及像控测量,并将采集的数据进行自动化三维建模,生成可视化三维场景;并对实景三维模型进行精细化建模,完成测区模型精细化渲染,满足三维可视化安防管理平台。
1.2项目内容1.3作业区概况(1)xxxxxxxxxxxxxxxx标志性建筑之一。
航飞总面积约为1.5平方公里,设计航飞分辨率为2~3cm;采集高精度像控点,对三维场景做进行精细化建模。
(2)xxxxxx航飞总面积约为1平方公里,设计航飞分辨率为2~3cm;采集高精度像控点,对三维场景做进行精细化建模。
(3)xxxxxxx航飞总面积约为1平方公里,设计航飞分辨率为2~3cm;采集高精度像控点,对三维场景做进行精细化建模。
1.4 引用文件➢《低空数字航空摄影规范》(CH/Z 3005-2010);➢《1:500、1:1000、1:2000 航空摄影测量内业规范》(GB/T7930-2008);➢《全球定位系统(GPS)测量规范》(GB/T18314-2009);➢《航空摄影技术设计规范》(GB/T 19294-2003);➢《数字航空摄影测量空中三角测量规范》(GB/T 23236-2009);➢《城市三维建模技术规范》(CJJ/T 157-2010);➢《三维地理模型数据产品规范》(CH/T 9015-2012);➢《三维地理信息模型生产规范》(CH/T 9016-2012);➢《数字测绘产品检查验收规定和质量评定》(GB/T18316-2008);➢《测绘成果质量检查与验收》GB/T24356—2009。
sirovision摄影测量岩体结构分析系统
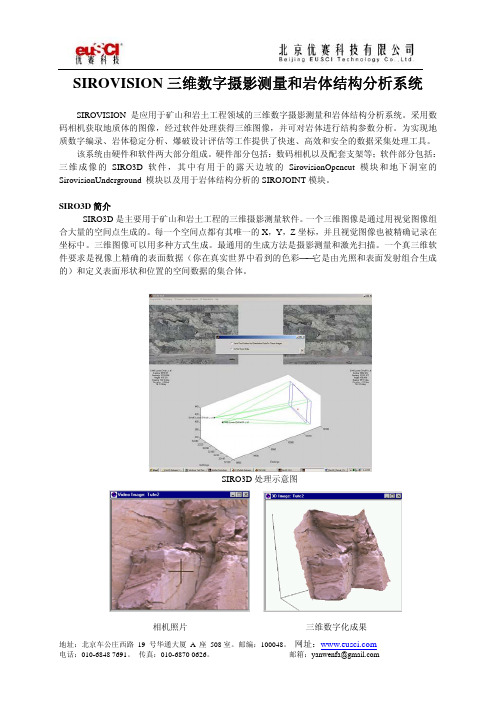
SIROVISION三维数字摄影测量和岩体结构分析系统SIROVISION是应用于矿山和岩土工程领域的三维数字摄影测量和岩体结构分析系统。
采用数码相机获取地质体的图像,经过软件处理获得三维图像,并可对岩体进行结构参数分析。
为实现地质数字编录、岩体稳定分析、爆破设计评估等工作提供了快速、高效和安全的数据采集处理工具。
该系统由硬件和软件两大部分组成。
硬件部分包括:数码相机以及配套支架等;软件部分包括:三维成像的SIRO3D软件,其中有用于的露天边坡的SirovisionOpencut模块和地下洞室的SirovisionUnderground 模块以及用于岩体结构分析的SIROJOINT模块。
SIRO3D简介SIRO3D是主要用于矿山和岩土工程的三维摄影测量软件。
一个三维图像是通过用视觉图像组合大量的空间点生成的。
每一个空间点都有其唯一的X,Y,Z坐标,并且视觉图像也被精确记录在坐标中。
三维图像可以用多种方式生成。
最通用的生成方法是摄影测量和激光扫描。
一个真三维软件要求是视像上精确的表面数据(你在真实世界中看到的色彩——它是由光照和表面发射组合生成的)和定义表面形状和位置的空间数据的集合体。
SIRO3D处理示意图相机照片三维数字化成果SIROJOINT简介SIROJOINT可以帮助用户测量分析岩体的结构参数,并通过三维图像进行可视化的岩体结构的分析的工具软件。
SIROJOINT集成了三维空间数据和二维图像,从而向用户提供分析岩体表面精确三维形貌的能力,分析不连续面的倾向,走向和间距等参数。
它提供了运用岩体精确记录在真实坐标系统的空间数据进行显示和分析的工具。
地下工程摄影测量硬件系统图三维图像与投影图结构面等直线分析图精确性和精度SirovisionOpencut、SirovisionUnderground是和SIROJOINT一起用来对岩体结构填图的。
该软件的设计目的既然基于上述目的,所以在3D空间中,面走向的精确性就是其特别关注的焦点。
基于计算机的三维医学图像处理方法——图像分割技术
文献标识码 : A
文章编号 :6 1 35(0 8 1 0 5 -0 17 -5 6 20 】2- 0 1 3
0 引言
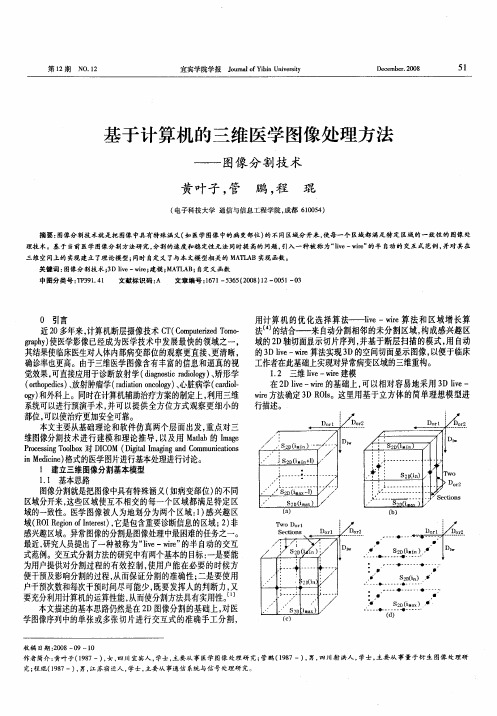
近2 多年来, O 计算机断层摄像技术 C (optidTm- T Cm ure oo ez g py使医学影像已经成为医学技术中发展最快的领域之一, r h) a 其 结果使临 床医生对人体内部病变部位的观察更直接、 更清晰, 确 诊率也更高。由于三 维医 学图像含有丰富的信息和逼真的视 觉效果, 可直接应用于诊断放射学(i nscm ioy 、 d got d l ) 矫形学 a i og (roei )放射肿瘤学( d tnoeo )心脏病学(a i— ohpds、 t c r ii og 、 a ao n ly cro dl o)和外科上。同时在计算机辅助治疗方案的制定上 , g) r 利用三维 系统可以进行预演手术 , 并可以提供全方位方式观察更细小的 部位, 可以使治疗更加安全可靠。 本文主要从基础理论和软件仿真两个层面出发, 重点对三 维图像分割技术进行建模和理论推导, 以及用 M db Iae aa 的 mg
i M in) n e c e格式的医学图片进行基本处理进行讨论。 d i l 建立三维图像分割基本模型 11 基本思路 . 图像分割就是把图像中具有特殊涵义( 如病变部位) 的不同 区域分开来, 这些区域使互不相交的每一个区域都满足特定区 域的一致性。医学图像被人为地划分为两个区域:) 1 感兴趣区 域(O ei Ie s , R I gn fn rt 它是包含重要诊断信息的区域; ) R o o te ) 2非 感兴趣区域。异常图像的分割是图像处理中最困难的任务之一。 最近, 研究人员提出了一种被称为“i — i ” le w e 的半 自动的交互 v r 式范例。交互式分割方法的研究中有两个基本的目 : 标 一是要能 为用户提供对分割过程的有效控制, 使用户能在必要的时候方 便干预及影响分割的过程, 从而保证分割的准确性; 二是要使用 户干预次数和每次干预时间尽可能少, 既要发挥人的判断力, 又 要充分利用计算机的运算性能, 从而使分割方法具有实用性。 … 本文描述的基本思路仍然是在 2 D图像分割的基础上, 对医 学图像序列中的单张或多张切片进行交互式的准确手工分割,
第8章三维图像处理技术
(图8-4)
2019年3月10日
数字图象处理演示稿 纪玉波制作 (C)
20
8.2.2.1距离方程 假设坐标为 的点P,被放置在摄像机前方, 并分别成像于两个摄像机平面上。那么,利用 zx 和 yz 平面中的相似三角形,可以看到从点P穿过透镜中心的 直线与 (图像)平面相交于
同样,从P穿过右摄像机的中心的直线将与图像平面相交于
2019年3月10日
数字图象处理演示稿 纪玉波制作 (C)
7
2019年3月10日
数字图象处理演示稿 纪玉波制作 (C)
8
2019年3月10日
数字图象处理演示稿 纪玉波制作 (C)
9
8.1.2 Fourier变换重构方法
Fourier变换重构图像所依据的原理是,一 个三维(二维)物体的二维(一维)投影的 Fourier变换是精确地等于物体的Fourier变换的 中心截面(中心直线),当投影旋转时,其 Fourier 变换的中心截面(中心直线)随之旋转。 因而重构图像的过程,首先由不同角度位置时的 投影变换构成物体完整的 Fourier 变换,然后, 通过取反Fourier变换重构物体。
从中解出Z0得到法向深度方程 (8-1)
2019年3月10日 数字图象处理演示稿 纪玉波制作 (C) 23
这个方程将距离的法向成分Z0与两幅图像偏移的像素 数联系起来。值得注意的是在方程中,Z0仅是xr和xl之差 的函数,而与他们单个值大小无关。由于Z0必须取正值, 应有 。还要注意的是分子的值与之相比可能非常 小。这就意味着对于大的Z0分母可能会非常小。因此,在 两幅图中特征定位的微小偏差可能会导致深度计算的大 误差。 同样在三维空间中,利用相似三角形,我们有
第八章 三维图像处理技术
大鼠脑三维标准图谱的构建及磁共振图像分析系统的研究及实现

AbstractNeuroscience is an important topic in nowadays, and rat is one of the broadest experimental animals. However, the huge amount of data collected by neuroscientists will become meaningless if we cannot give them a precise description of th eir locations. The Rat Brain Atlas is a powerful tool for such questions.This work is supported by the project of “3D reconstruction of rat brain atlas and MR image analyzing system”, which comes from Wuhan Institute of Physics & Mathematics the Chinese Academy of Sciences. The purpose of this project is to further implement the image analysis and visualization functions based on the former work “3D MR image processing system”.This thesis focuses on the following aspects of MR image visualization: preprocessing of MR and atlas images; 3D reconstruction and visualization; anatomical structures registration, localization and labeling.In the preprocessing part, the vectorial atlas slices are transformed into scalars. The brain of the rat is extracted from MR images with SNAKE model. Then, the two type slices are re-sampled with the same resolution.In the part of 3D reconstruction and visualization, we implemented volume rendering of rat brain based on ray-casting and texture mapping separately, surface rendering based on MC algorithm, and 3D arbitrary cutting view utilizing VTK.A manual registration method is introduced, f u rthermore, an automatic registration strategy based on PCA is implemented in the part of registration between atlas and MR image. In addition, the localization and labeling of ROI in 2D and 3D MR image are completed at last.Considering customers’ require, taking the engineering's principle of Object Oriented (OO) and stability and compatibility into account, this system is designed and implemented with Visual C++6.0 and VTK on windows platform. Practice proved that this system has a higher capability than our former MRI processing system in rat brain anatomic structure analysis.Key Words:MR Image, Rat Brain Atlas, ROI (Region of Interesting), 3D visualization, VTK, Image Registration, Localization and Labeling独创性声明本人声明所呈交的学位论文是我个人在导师指导下进行的研究工作及取得的研究成果。
多视点大尺寸光场真三维显示系统

作品名称:多视点大尺寸光场真三维显示系统大类:科技发明制作B类小类:信息技术简介:本团队针对目前商业化高清晰度真三维显示器缺乏的问题,提出了基于场景渲染和基于光场采集的两种投影图像生成方法,建立了投影光场分析模型,研究了多视光场三维显示技术及光场采集技术,并在此理论基础上研发了一套“多视点大尺寸光场真三维显示系统”及其配套的光场采集系统。
该系统实现了裸眼真三维显示及远程实时三维直播功能,在水平方向上观看与真实物体毫无差异,具有可视角度广、显示尺寸大、成本较低等高实用性特点。
详细介绍:【研究背景】三维显示技术是当今国际信息电子产业的最前沿研究方向之一。
20 世纪40年代以来,人们就提出关于三维显示技术的各种解决方案,并不断尝试制作各种三维显示装置,但是由于种种技术上的限制而未能实现。
90 年代初,激光、电子、计算机等技术的迅速发展,许多国家再次活跃在三维显示技术的相关研究工作中,并获得了相当大的进展。
目前,实现三维显示的技术分为伪三维显示技术和真三维显示技术两种,前者视点数极少,只能通过双目视差形成立体效果,基本没有实现物体的移动视差,这与真实物体的显示存在差异;而后者视点数很多,兼具双目视差与移动视差,观察者在显示装置前移动位置时会观察到物体连续变化的各个角度上的图像,显示效果非常逼真。
更重要的是观察伪三维显示装置时,人眼会存在辐辏和调焦上的矛盾,不仅会加重人眼与大脑的负担,长时间观看还会引起视觉疲劳和头晕不适。
伪三维显示技术包括双目立体显示(立体眼镜)和裸眼3D 电视,而真三维显示技术则主要包括体三维显示技术和全息影像技术。
这些技术目前尚未完善,综合而言主要存在以下方面的不足:1.细节显示效果不佳。
2.难以实现多人同时自由观看:其一是显示尺寸小,观看者需要在很近距离才能观看;其二是视点少、视角窄,对观看者的观看角度、位置限制较多。
一旦观看者偏离规定位置,会产生重影、模糊等现象,严重影响显示效果。
医院PACS系统组成及系统流程
医院PACS系统组成及系统流程目录1. PACS系统介绍 (1)2. PACS系统组成 (2)2.1. 影像采集工作站 (2)2.2. 影像传输 (2)2.3. 3.管理与归档服务器 (3)2.4. 应用服务器 (3)2.5. 影像阅片工作站 (3)3. PACS系统流程 (4)4.与PACS有关的问题解答 (5)4. 1. PACS系统有哪些效益? (5)5. 2.有了配套工作站以后还需要PACS吗? (5)6. 3.有了磁光盘(M0)以后还需要PACS吗? (5)7. 4. PACS系统一定要带有三维图像处理吗? (6)8. 5.胶片扫描将被淘汰? (6)9. 6.影像管理将向,集中坏『在线,方向 (6)10. 7.评价PACS系统,好坏郭J粗略原则是什么? (6)11. 8.是不是PACS系统都要有DICOM? (7)12. 9.有DICOM的PACS一定是先进的PACS吗? (7)13. 0. PACS该不该包括登记和报告系统? (7)14. 11. HIS厂商是否都要做PACS? (7)15. 12. RIS/PACS网络是遥远的事情吗? (8)16. 13.国产PACS和国外PACS差在哪里? (8)1. PACS系统介绍PACS 系统是Picture Archiving and Communication Systems 的缩写,意为影像归档和通信系统。
它是应用在医院影像科室的系统,主要的任务就是把日常产生的各种医学影像(包括核磁,CT,超声,各种X光机,各种红外仪、显微仪等设备产生的图像)通过各种接口(模拟,DICOM,网络)以数字化的方式海量保存起来,当需要的时候在一定的授权下能够很快的调回使用,同时增加一些辅助诊断管理功能。
PACS主要分为医学图像获取、大容量数据库存储管理、图像显示和处理、数据处理库管理以及用于传输影像的局域或广域网络等五个单元。
PACS有硬件和软件两部分构成,硬件主要有接口设备、存储设备、主机、网络设备和显示系统等;软件功能包括通信、数据库管理、存储管理、任务调度、错误管理和网络监控等。
三维全景的制作方法

三维全景的制作方法随着科技的不断发展,三维全景技术已经逐渐成为了现代数字媒体的重要组成部分。
三维全景的制作方法也越来越成熟,其应用范围也越来越广泛。
本文将介绍三维全景的制作方法,帮助读者了解三维全景技术的基本原理和制作流程。
一、三维全景技术的基本原理三维全景技术是一种通过计算机图形处理技术将多张照片或视频合成为一个全景图像的技术。
它基于人眼的视觉原理,通过拍摄多张照片或视频,然后将它们拼接起来,形成一个连续的全景图像。
三维全景技术的基本原理包括以下几个方面:1. 拍摄多张照片或视频在制作三维全景图像时,首先需要拍摄多张照片或视频,以覆盖全景范围内的所有景象。
这些照片或视频需要保持一定的重叠度,以确保后续处理的准确性。
2. 图像校正和配准在将多张照片或视频合成为一个全景图像之前,需要对这些图像进行校正和配准。
这是因为在拍摄过程中,由于拍摄位置和角度的变化,不同照片或视频之间的图像可能存在一些畸变和偏移。
因此,需要通过图像校正和配准来消除这些畸变和偏移,使图像之间的对应点能够准确匹配。
3. 图像拼接和融合在完成图像校正和配准之后,需要将所有照片或视频拼接成一个全景图像。
这一过程需要通过图像拼接和融合来实现。
具体来说,可以采用图像拼接算法将多张照片或视频拼接成一个全景图像,然后通过图像融合算法将相邻图像之间的过渡部分进行平滑处理,以达到更加自然的效果。
4. 全景图像的显示和交互最后,需要将制作好的全景图像进行显示和交互。
可以通过将全景图像投射到球面或圆柱面上来实现全景图像的显示,然后通过交互式的方式让用户可以自由浏览和探索全景图像。
常用的交互方式包括鼠标拖拽、触摸屏手势等。
二、三维全景的制作流程基于以上的原理,下面将介绍三维全景的制作流程,包括拍摄、图像处理和显示交互三个步骤。
1. 拍摄在拍摄过程中,需要使用一台高清相机或摄像机,以保证拍摄出的照片或视频具有足够的清晰度和细节。
同时,需要使用三脚架或稳定器来保证拍摄的稳定性,避免图像模糊或抖动。
基于VTK库的医学图像处理子系统设计和实现
1介绍随着计算机技术的快速发展,医学图像归档和传输系统(PACS),为放射科医生提供一致的,查询和操作医疗设备产生的图像的接口,以辅助医生进行诊断,将越来越受到放射科医生和医疗单位的重视。
其中的医学图像处理子系统,作为辅助医生进行诊断的重要手段,是PACS系统的核心部分。
笔者针对研究人员在研究医学图像处理算法中对获取和操作医学图像方便性的需求,以及医疗或相关单位对实现PACS系统对医学图像处理功能的需要,以VTK(VisuaIization TooIkit)类库为基础,设计和实现了一个医学图像处理子系统。
采用VC6编程语言,将该系统封装成ActiveX控件。
该控件可以很方便地被VC,VB,PB,Java等其它编程语言调用,实现自己所需的图像处理或PACS管理系统等。
该控件能够读取各种格式的图像,如位图、JPEG图像,以及遵循医学DICOM3标准产生的医学图像等。
而且,控件还提供一些图像处理功能,如缩放、平移、旋转、局部缩放、滤波、去噪声,测量像素之间的长度、像素面积,在图像上显示标注信息等功能,还有更重要的一点是,它能够提供医学图像可视化,或三维重建的功能,将二维的医学图像面片重建成三维实体,肺、骨骼等,以帮助医生进行诊断。
DI-COM(DigitaI Imaging and Communication in Medicine)标准是由ACR(American CoIIege of RadioIogy)及NEMA(NationaI EI-ectricaI Manufacturers Association)所形成的联合委员会,于1983年以后陆续发展而成的医疗数字影像及传输标准。
DICOM是医学图像及其相关信息的通讯标准,目前DICOM Version3.0是完全根据ACR/NEMA PS3.1-1992,由ACR验证,NEMA 发表的标准。
该控件还实现了部分DICOM3协议,使它可以从其它符合DICOM3协议的工作站或医疗设备接收,或向它发送符和DICOM3标准的图像,它还可以将图像送往DICOM3标准的打印机,实现医生常用的照相功能等,从而该控件具有良好的兼容性和扩展性。
3D手术方案

3D手术方案介绍在过去的二十年里,3D技术在医疗领域取得了显著的进展。
尤其是3D手术方案的出现,为医生在手术中提供了精确的图像引导和操作指南。
本文将介绍3D手术方案的概念、应用和优势,并对其未来发展趋势进行探讨。
什么是3D手术方案?3D手术方案是利用先进的3D成像技术对手术过程进行实时监测和导航的系统。
它结合了医学影像学、计算机技术和手术导航技术,为医生在手术中提供更精确的定位和操作指导。
通常,该方案包括以下几个关键组成部分:1.三维成像系统:用于生成高质量的三维图像,如CT扫描、MRI扫描或超声成像等。
2.手术导航系统:通过将三维图像与实时手术场景对齐,提供准确的手术位置和定位信息。
3.手术操作工具:根据手术导航系统提供的指导信息进行手术操作。
应用领域3D手术方案在医疗领域的应用非常广泛,包括但不限于以下几个方面:神经外科神经外科手术需要极高的精确性和稳定性。
通过使用3D手术方案,医生可以在手术前准确地规划手术路径及关键结构,以及在手术过程中实时引导手术操作,大大提高手术的安全性和准确性。
心脏外科心脏外科手术需要对心脏的解剖结构和功能进行准确的评估和操作。
借助3D手术方案,医生可以获取精确的心脏图像,并在手术中实时导航和引导手术操作,以最小化手术风险并提高手术效果。
骨科骨科手术通常需要对骨骼结构进行精确复原或修复。
使用3D手术方案,医生可以事先进行手术仿真,并在手术中实时引导手术操作,以达到更好的手术效果。
优势和挑战优势1.提高手术精确性:3D手术方案可以提供精确的图像导航和操作指导,帮助医生更准确地定位和操作。
2.减少手术风险:借助3D手术方案,医生可以提前规划手术路径,避开重要结构,减少手术风险。
3.提高手术效率:通过提供实时导航和操作指导,3D手术方案可以帮助医生更快地完成手术并减少手术时间。
4.促进医学教育和培训:学生和医生可以通过使用3D手术方案进行手术仿真和培训,提高其手术技能和知识水平。
非扫描激光三维成像系统算法及工程实现
非扫描激光三维成像系统算法及工程实现张颖;司一冰;曹昌东;刘波;眭晓林【摘要】The principle and basic module of non-scanning laser 3D imaging system were firstly introduced,then the processing platform of system signal was constructed based on the FPGA +DSP hardware.The experimental results show that the system can better complete the 3D pseudo color image display.%介绍了非扫描激光三维成像系统的工作原理和基本组成模块,通过采用 FPGA +DSP硬件架构,构建了系统信号处理平台。
实验结果表明,系统能够较好地完成图像的三维伪彩色显示。
【期刊名称】《激光与红外》【年(卷),期】2015(000)006【总页数】4页(P621-624)【关键词】激光三维成像;非扫描;FPGA;DSP【作者】张颖;司一冰;曹昌东;刘波;眭晓林【作者单位】华北光电技术研究所,北京 100015;营口实验高级中学,辽宁营口115005;华北光电技术研究所,北京 100015;华北光电技术研究所,北京 100015;华北光电技术研究所,北京 100015【正文语种】中文【中图分类】TN2491 引言非扫描激光三维成像探测技术作为一种新的激光成像探测技术,相对于扫描成像探测系统,具有以下的技术优点:成像速度快,当目标或测量设备移动时,无图像失真;可靠性好,激光发射器与接收器无须严格平行,没有高速扫描器,系统结构更加紧凑。
针对这项技术的工程化研究对于地形地貌遥感测绘、数字地形和建筑物建模以及目标识别系统的研制具有重要意义。
2 系统工作原理非扫描激光三维成像系统采用增益可调制的成像设备,接收探测目标物反射回的激光信号。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三维图像处理系统组成及实现方案
三维图像信息处理一直是图像视频处理领域的热点和难点,目前国内外成熟的三维信息处理系统不多,已有的系统主要依赖高性能通用PC完成图像采集、预处理、重建、构型等囊括底层和高层的处理工作。
三维图像处理数据量特别大、运算复杂,单纯依靠通用PC很难达到实时性要求,不能满足现行高速三维图像处理应用。
本系统中,采用FPGA实现底层的信号预处理算法,其处理数据量很大,处理速度高,但算法结构相对比较简单,可同时兼顾速度和灵活性。
高层处理算法数据量较少、算法结构复杂,可采用运算速度快、寻址方式灵活、通信机制强大的DSP实现[1,4]。
1 三维图像处理系统组成
1.1 硬件系统构成
该系统由五个模块组成,如图1所示。
系统信息处理流程见图2所示。
CCD摄像机采集的多路模拟视频信号经MAX440按需要选定后,送入模数视频转换器SAA7111A将摄像机输出的模拟全电视信号CVBS转换成数字视频信号;之后视频信号流入图像预处理器Spartan XC3S400,经过提取中心颜色线、提取激光标志线和物体轮廓线的预处理后,配送到两片TS201进行定标参数计算、坐标计算、三维重建、数据融合以及三维构型的核心运算;最后将DXF文件数据经由PCI接口传送到PC,完成三维图像变换和显示等最终处理;整个系统的逻辑连接和控制以及部分数据交换由另一片FPGA来完成[1]。
在体系结构设计上,FPGA处理器采用SIMD结构,在一个控制单元产生的控制信号下,数据通路中的三个算法并行运行。
由于该系统要求处理速度较高,因而在数据通路中采用了流水线技术以提高速度。
此外,本系统中为图像存储采用了许多大容量高速FIFO,以达到减少地址线,简化控制的目的。
1.2 处理器芯片
为满足系统大数据量快速处理的要求,三款核心芯片均为最新高性能产品,其硬件方面的。