ArduPilot自动驾驶仪中文手册(待完稿)
APM固定翼设置完整手册(方少版)

警告:不要超过 6.0V 直流电源输入电压,否则会损坏你的板子。
在某些情况下,为了避免在大电流时可能出现的电压下降,略高于中位数的输入 电压(但低于最高)会有一些帮助。
APM2 的电路图和 PCB 文件在这里 (Eagle 格式).
备用供电方式
板子出厂设置是用 RC 设备供电,RC 输入和输出共享一个电源。在设置和调试 的时候你可能用 USB 电缆给板子供电。但在飞机上,你需要将它连接到你的电 源系统,通常是由电池通过 ESC 供电。 用两个独立的电源给 APM 2 供电也是可以的。其中一个给输入侧的遥控设备供 电,另一个给输出侧供电(舵机或电调)。这通过 JP1 上的跳线决定(见下文)。 如果插上跳线(出厂默认),板子会从输出引脚供电。如果跳线没插,电路板从
• 包含了 I/O Pin 脚正负极反向及其他电源及讯号的保护,增强了稳定性和 可靠性。
• 遥测模块通讯端口改为 5 针的连接器,这样可以避免插反,消除了用户 在 APM 2.0 常见的错误。(已经包含了标准的 3DR 及 Xbee 转接线)
• 如果有需要的话,现在可以使用外接式的电子罗盘,可以让传感器远离电 磁干扰。要使用时,找到上面有标记的微跳线将它切断,接上外接式的电 子罗盘到 I2C 插座。更多信息请见此页。
• 无内置电压监测。大多数人觉得电流监测比电压有用,所以我们现在推荐 Sparkfun 电流传感器,可插入到一个传感器的插座上。
APM 1 和 APM 2 的差别
APM 1 和 APM 2 之间的主要功能差异是传感器。 AMP 2 拥有先进的 InvenSense MPU-6000 陀螺仪/加速计芯片,它有自己的传感器融合处理器。它 还有东西
PDF 文件使用 "pdfFactory Pro" 试用版本创建
ardupilot设置指南
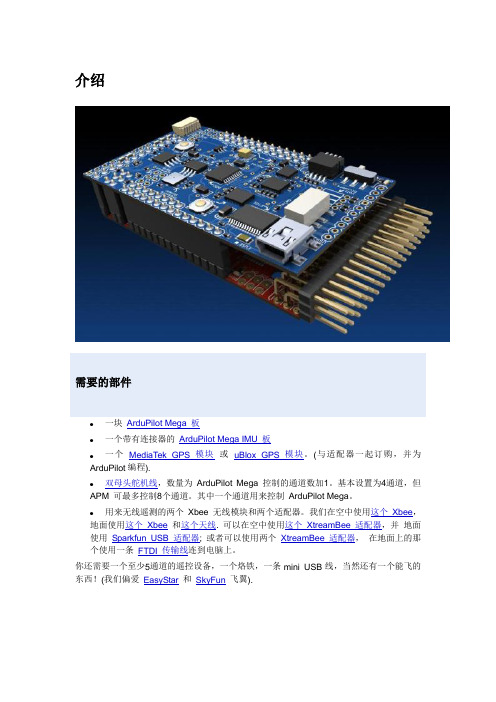
介绍需要的部件∙一块ArduPilot Mega 板∙一个带有连接器的ArduPilot Mega IMU 板∙一个MediaTek GPS 模块或uBlox GPS 模块。
(与适配器一起订购,并为ArduPilot编程).∙双母头舵机线,数量为ArduPilot Mega 控制的通道数加1。
基本设置为4通道,但APM 可最多控制8个通道。
其中一个通道用来控制ArduPilot Mega。
∙用来无线遥测的两个Xbee 无线模块和两个适配器。
我们在空中使用这个Xbee,地面使用这个Xbee和这个天线. 可以在空中使用这个XtreamBee 适配器,并地面使用Sparkfun USB 适配器; 或者可以使用两个XtreamBee 适配器,在地面上的那个使用一条FTDI 传输线连到电脑上。
你还需要一个至少5通道的遥控设备,一个烙铁,一条mini USB线,当然还有一个能飞的东西!(我们偏爱EasyStar和SkyFun飞翼).方法仔细阅读说明书!某一天自驾仪将成为一个能在沃尔玛买到的即插即用设备,但可惜不是现在。
飞行器各不相同,而作为一个开源项目我们尽可能支持广泛的硬件配置。
这就意味着在飞行之前你必须配置自驾仪。
一旦你配置好,你还需要根据自己的飞机来调整自驾仪。
采用循序渐进的方法,也就是说,首先处理基本问题,每次只改变一到两个设置,然后测试是否合适,在进行下一项调整。
另外重要一点是只有在理解之后再做尝试。
在还没有良好理解和阅读注意事项之前使用使用默认设置。
反复阅读基本章节。
保留以前的版本,这对排除问题是很有用的,或者也可以恢复到以前正常工作的版本。
如果存在疑问,在飞真机之前使用模拟器!连接到电脑上APM 使用一条miniB USB 数据线。
如下所示插到板子上:当吧你的APM 用USB 数据线连到电脑上时,Windows 7 将识别FTDI USB转串口芯片并安装正确的驱动。
如果没有识别,或者你使用早期版本的Windows,你需要从这里下载和安装正确的驱动。
ArduPilot 自动驾驶仪手册(待完稿)

ArduPilot 自动驾驶仪手册QQ讨论群:57343222一、简介系统构成:1、一块ArduPilot Mega板(红色)2、一块ArduPilot Mega IMU板(红色)3、一套 MediaTek GPS 或者 uBlox GPS模块4、若干根接收机连接线及配套的插线,如果需要使用系统的自动驾驶和功能,推荐使用8通道接收机5、一套Xbee数传电台,一块Xbee数传电台与ArduPilot Mega IMU,另一块通过适配器与PC相连(提醒:因传送的数据量大,推荐配置空中速率位57600bps的数传电台,低速率数传电台将会导致严重的数据丢包现象)。
仔细阅读本手册,将有利于调试自动驾驶仪。
作为一套开源的自动驾驶仪,我们支持第三方传感器的接入,如空速计、电子罗盘等,这意味着您必须对本系统进行正确的参数设置,才能安全飞行。
二、快速入门指南(一)电路板的组装所需材料及工具:MEGA 板和IMU板各一块;板件连接插件若干;带连线的GPS模块(推荐4HZ);烙铁;焊丝等1、焊接MEGA机IMU板上的元器件2、对应安装好两块板子之间的连接插件3、两块板子相插4、连接GPS模块之后的样子,注意:GPS模块连接在红色MEGA板子上,而非蓝色IMU板子上的接口,IMU的6芯接口用于连接诸如电子罗盘等外接传感器。
(二)如何连接1、系统连接图其中,自动驾驶仪控制通道为第八通道,利用三段开关进行模式切换。
2、安装示意图因IMU板载三轴传感器,系统安装时需充分考虑到减震,尽量使其在飞机上水平安装,且安装方向应如上图所示。
3、DIP开关的使用因为接收机和配置文件之间会存在差异,可能会导致舵机出现反向工作,这时你可以通过拨动DIP开关进行修正,而非通过复杂的参数修改进行修正。
三、编程(一)所需工具1、MINI USB数据线,用于ardupilot与PC的相连。
2、配置软件arduino,下载地址/en/Main/Software (二)如何通过arduino进行编程1、通过USB连接arduino与PC,同时根据提示安装FT232RL驱动,并记下串口号。
APM中文使用手册Word版
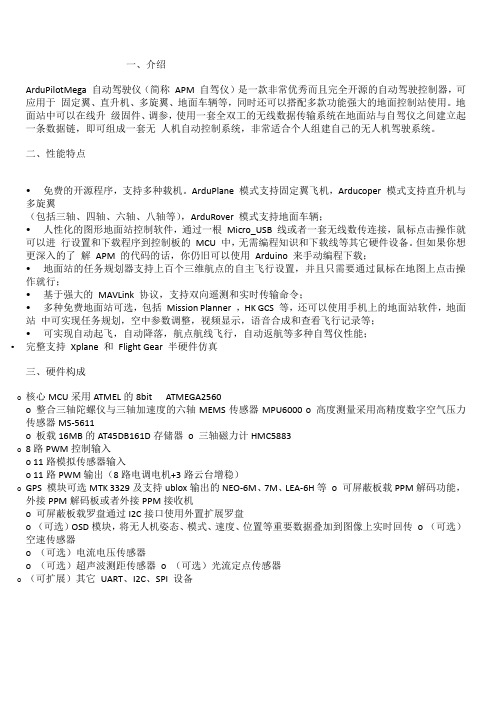
一、介绍ArduPilotMega 自动驾驶仪(简称APM 自驾仪)是一款非常优秀而且完全开源的自动驾驶控制器,可应用于固定翼、直升机、多旋翼、地面车辆等,同时还可以搭配多款功能强大的地面控制站使用。
地面站中可以在线升级固件、调参,使用一套全双工的无线数据传输系统在地面站与自驾仪之间建立起一条数据链,即可组成一套无人机自动控制系统,非常适合个人组建自己的无人机驾驶系统。
二、性能特点•免费的开源程序,支持多种载机。
ArduPlane 模式支持固定翼飞机,Arducoper 模式支持直升机与多旋翼(包括三轴、四轴、六轴、八轴等),ArduRover 模式支持地面车辆;•人性化的图形地面站控制软件,通过一根Micro_USB 线或者一套无线数传连接,鼠标点击操作就可以进行设置和下载程序到控制板的MCU 中,无需编程知识和下载线等其它硬件设备。
但如果你想更深入的了解APM 的代码的话,你仍旧可以使用Arduino 来手动编程下载;•地面站的任务规划器支持上百个三维航点的自主飞行设置,并且只需要通过鼠标在地图上点击操作就行;•基于强大的MAVLink 协议,支持双向遥测和实时传输命令;•多种免费地面站可选,包括Mission Planner ,HK GCS 等,还可以使用手机上的地面站软件,地面站中可实现任务规划,空中参数调整,视频显示,语音合成和查看飞行记录等;•可实现自动起飞,自动降落,航点航线飞行,自动返航等多种自驾仪性能;•完整支持Xplane 和Flight Gear 半硬件仿真三、硬件构成o核心MCU采用ATMEL的8bit ATMEGA2560o 整合三轴陀螺仪与三轴加速度的六轴MEMS传感器MPU6000 o 高度测量采用高精度数字空气压力传感器MS-5611o 板载16MB的AT45DB161D存储器o 三轴磁力计HMC5883o8路PWM控制输入o 11路模拟传感器输入o 11路PWM输出(8路电调电机+3路云台增稳)o GPS 模块可选MTK 3329及支持ublox输出的NEO-6M、7M、LEA-6H等o 可屏蔽板载PPM解码功能,外接PPM解码板或者外接PPM接收机o 可屏蔽板载罗盘通过I2C接口使用外置扩展罗盘o (可选)OSD模块,将无人机姿态、模式、速度、位置等重要数据叠加到图像上实时回传o (可选)空速传感器o (可选)电流电压传感器o (可选)超声波测距传感器o (可选)光流定点传感器o(可扩展)其它UART、I2C、SPI 设备四、硬件方框图五、飞控板概览正面图1、数传接口2、模拟传感器接口3、增稳云台输出接口4、ATMEGA2560 SPI 在线编程接口(可用于光流传感器)5、USB 接口6、遥控输入7、功能选择跳线8、GPS 接口9、I2C 外接罗盘接口10、ATMEGA32U2 SPI 在线编程接口11、多功能可配置MUX 接口(默认为OSD 输出)12、电流电压接口13、电调供电选择跳线14、电调输出接口背面图1、SPI 的MISO 电压选择2、PPM 输入选择3、MUX 接口功能选择六、硬件安装在APM 主板拿到手后,首先应明确自己的用途,并且熟悉了上述功能和接口再进行后续的硬件安装和连接。
智能自动抗滑跑车舵机指南说明书
ISSN: 2454-132XImpact factor: 4.295(Volume 5, Issue 3)Available online at: Smart steering in automobiles for safe drivingKiran B. V.The Oxford College of Engineering, Bengaluru, KarnatakaAlbert JamesThe Oxford College of Engineering,Bengaluru, KarnatakaD. Chandan KrishnaThe Oxford College of Engineering,Bengaluru, KarnatakaB. DharshanThe Oxford College of Engineering, Bengaluru, KarnatakaDr. Manju DeviThe Oxford College of Engineering, Bengaluru, KarnatakaABSTRACTAutomobiles have been an integral part of the modernization and development of civilization. Right from the beginning of the industrial revolution, there were a huge number of automobiles manufactured. This called in for the need for safety measures to be implemented into the vehicle for protection of the passenger in case of accidents. Various safety measures were implemented in this domain, such as functions like Seat belt, Anti-lock Braking System, Safety Airbag System and many more. The accident toll continued to increase over the years despite these safety measures. These accidents were caused by human negligence such as drunken driving, drowsiness, unhealthy condition and a lot more. This paper, hence, proposes a system in which the driver cannot drive under the influence of alcohol and also a basic level health condition test to check if the driver is fit to drive. It also has a system that can sense if the driver is sleepy and alerts the driver back to his senses if found sleeping. This can ensure the complete safety of the passenger while driving and can reduce the accidents to almost zero values that are caused by the above mentioned human faults. To add to the safety in case of any accident the system houses a crash detector and flame detector along with GPS and GSM modules to alert the nearby authorities to get to the rescue. As a whole, the system can provide unimaginable safety assurance against fatal accidents and hence save precious life's.Keywords—Car safety system, GPS, Sensors, GSM, Microcontroller1.INTRODUCTIONRoad accidents have increased all over the world. According to recent surveys by the Ministry of Road Transport and Highways under the Government of India, it is seen that most of the accidents occur due to the negligence of the driver and due to improper care given to the casualty if in case of an accident. It was recorded that about 150,000 people die every year in road accidents. This tool can be brought down by integrating sensors and automating the automobiles which would alert the emergency services to the site of the accident hence increasing the survival rate of the victim.This paper proposes the idea of preventing an accident from occurring even before the driver would start the vehicle. The integration of various sensors into the system ensures that the driver needs to be fit enough to drive the vehicle and hence restricting an accident which might occur in the future if the driver is allowed to drive.2.LITERATURE SURVEYThis section aims to shed light on the different implementations and ideas associated with this topic as well as those that have helped in the formulation of the idea.Xian Li, Hui Huang and Ye Sun [1]describes a vehicular automation system in their paper. They used a GSR sensor to monitor the stress levels during driving. They used a sitting posture sensor cushion which is an array of tribal-elements covering the sitting area on the driving seat. This provided the necessary information regarding the pressure the human body experiences during a drive.Barış Guksa and Burcu Erkmen[2]describes a vehicular automation system that uses a smart phone in order to detect the user’s drowsiness. It uses the smartphone's camera to capture the driver's images and check if he is awake or not. It provides a voice alert as well as a phone alert to the driver in the event that he is found to be sleeping.Vivek Gupta, Vikramsingh Mane, Manash Ranjan Pradhan and Kapil. B. kotangale [3]describes an IoT based car automation that uses Raspberry Pi at its core. They proposed monitoring the different parameters such as temperature, humidity, fuel indication, speed of a car and also the location of acar based on the IoT concept.3.METHODOLOGYFig. 1: Block DiagramThis section shows an overview of the system. Figure 1 shows the block diagram of the proposed system.The ATmega 328P (Arduino Nano) acts as the heart of the system. To this, the various application specific sensors are interfaced to work as one unit. A slot sensor is used to detect whether the driver is wearing the seat belt or not. The gas sensor is used to detect the alcohol consumption of the driver. It is used to check if the alcohol level is beyond the permissible limit. A flame sensor is used to check if there is any fire in the engine compartment. A pulse sensor is integrated with the steering wheel to continuously monitor the heartbeat of the driver. The drowsiness detector used here is an IR based wearable spectacles. An alternative for this is a camera mounted on the rear view mirror. A bump switch at the bonnet of the car is used for accident detection. An emergency switch is placed inside the car which the driver can use to alert the authorities such the fire brigade, emergency service personnel, etc. in the event of an accident. The GSM and GPS modules are used to alert the authorities of the location of the driver in the event of an accident or in case of driving under influence.3.1 Hardware requirements(a)ATmega 328P: It is a high performance, pico-power, 8-bitAVR RISC based microcontroller that is capable of executing powerful instructions in a single clock cycle, hence approaching throughputs of 1MIPS per MHz(b)Flame sensor: The flame sensor module is sensitive to aflame. It detects flame or a light source of wavelength in the range of 700nm-1100nm. Its detection point is about 60 degrees and is particularly sensitive to the flame spectrum.(c)Alcohol sensor (MQ3): It is a low-cost semiconductor sensorwhich can detect the presence of alcohol gases at concentrations from 0.05 mg/L to 10 mg/L. It’s conductivity increases as the concentration of alcohol gases increases. It has high sensitivity to alcohol and good resistance to disturbances due to smoke, vapour and gasoline. It has high sensitivity and response time. It is stable and has a long life.(d)Pulse sensor: The pulse sensor has two sides, one side has theLED placed with the ambient light sensor and the other has the circuitry. The LED is placed over a vein on the human body. The LED emits light which will fall on the vein. The flow of blood causes the light to be reflected back which is detected by the ambient light sensor. This is monitored over time to determine the heart beats.(e)Slot sensor: It consists of IR LED and Photodiode mountedfacing each other enclosed in a plastic body. When the light emitted by the IR LED is blocked because of someobstruction, the level of the photodiode changes. This change in the logic level can be sensed by the microcontroller or by discrete hardware.(f)Bump switch: It is one of the simplest sensors which canperform obstacle and collision sensing. The extended lever allows the implementation to be simple, which closes the switch on colliding with an obstacle.(g)IR based Eye blink sensor: It is an IR based sensor. Thevariations across the eye will differ as per eye blink. If the eye is closed the output is high or logic 1, otherwise, the output is low or logic 0. This is given to logic circuits for further use.(h)GSM + GPS Module (SIM 808): At the heart is a powerfulGSM cellular with integrated GPS. It is an all-in-one cellular phone module that lets us add location-tracking, voice, text, SMS and data as per our needs. Its quad-band 850/900/1800/1900MHz –allows one to connect onto any global GSM network.3.2 Software requirementsArduino IDE:The Arduino integrated development environment or IDE for short, is a cross-platform application that is written in the programming language Java. It is used to write and upload programs to Arduino compatible boards, but also, with the help of 3rd party cores, other vendor development boards.4.IMPLEMENTATIONFig. 2: Flowchart of the systemThe system operation begins with the initialization of the microcontroller. It initializes the various pins for inputs and outputs. The various sensors connected with the microcontroller keep providing data that they measure. The loop starts by first checking the slot sensor. If the driver has not worn the seat belt it will give an alert. Next, it checks the alcohol sensor to see whether the driver is perfectly alright or drunk. If he is found to alcohol levels above a certain level, the ignition is inhibited as well as his GPS coordinates are sent to his relatives. Following this is the pulse sensor that is mounted on the steering wheel. It keeps monitoring the driver heart beat rate. When this data is found to be abnormal, an alert is provided. In the case of repeated abnormality, the emergency personnel are alerted. Inside the engine compartment, the flame sensor keeps monitoring the engine. Once there is any spark or a flame that may lead to disastrous consequences, it sends an alarm that relays information about the fire. In the event of an accident, the bump switch placed at the bumper or the bonnet relays a logic one to the microcontroller. The microcontroller, in turn, send the GPS coordinates of the vehicle in the event of an accident. Anothersafety feature is the presence of the emergency switch. In the event of an accident, if the bump switch fails, the driver can manually use the emergency switch to send out a distress signal to alert the authorities of the accident. The blink sensor keeps checking the driver’s alertness. It counts the interval between blinks to determine whether the driver is awake or sleeping. If it is found that the driver is found to be sleeping, a gentle vibration is given to the driver through the motors placed in the steering wheel. If the same continues over a period of time an alert is sent to the driver’s relatives so that they can call the driver and wake him up. Once the basic parameters which include the slot sensor, alcohol sensor and pulse sensor are checked, and it is found that the driver is fit to drive, the ignition is started. During the drive, all the sensors are active, as they monitor the driver at all times in order to provide complete safety to the driver.Fig. 3: Hardware setup (internal)Fig. 4: Final hardware setup (external)5.RESULTIn doing this project, we achieved our required outputs and a working prototype was implemented. The output of the system displayed using the Arduino IDE is shown.Fig. 5: Serial Monitor (Arduino IDE output)This shows the various sensor readings as well as the alert messages along with the GPS coordinates. 6.CONCLUSIONA successful prototype was implemented which achieved the set goals to monitor the driver while he is driving as well as act as an accident preventive mechanism by sensing the driver’s condition prior to the commencement of the drive. It also alerts the authorities about the vehicle in case of an accident. Through this system, we hope to reduce the number of road accidents bya significant number.7.FUTURE WORKSGoing forward, the proposed system can be incorporated with the technologies that will be predominant in the days to come. Taking 5G as an example, the reduced latency will allow the sensors to read and transmit data more efficiently. Also with the arrival of self-driving cars, the proposed system when incorporated in such a vehicle, working in tandem with the 5G cellular networks will allow the cars to communicate with one another, which may prove to be of vital importance in the event any health-related issue crops up during a drive.8.ACKNOWLEDGEMENT“Success is the abstract of hard work and perseverance but most important of all is the encouraging guidance”So, I acknowledge all those whose guidance served as a beacon of light and crowned our efforts with success. I would like to express my heartfelt gratitude for the Head of the Department and project guide Dr. Manju Devi for the continuous support and guidance given throughout the period of work.Last but not the least I extend my heartfelt thanks to my parents and all my friends for their encouragement, moral support and affection throughout my period of study.9.REFERENCES[1]X. Li, H. Huang and Y. Sun, "DriTri: An in-vehicle wirelesssensor network platform for daily health monitoring," 2016 IEEE SENSORS, Orlando, FL, 2016, pp. 1-3.[2] B. Guksa and B. Erkmen, "Smart phone application fordrowsiness detection during driving," 2017 2nd International Conference on Frontiers of Sensors Technologies (ICFST), Shenzhen, 2017, pp. 218-221. [3]Vivek Gupta, Vikramsingh Mane, Manash Ranjan Pradhanand Kapil. B. kotangale, “ IOT Based Car Automation Using Raspberry Pi,” Imperial Journal of Interdisciplinary Research (IJIR) Vol-3, Issue-4, 2017.[4]P. Y. Bangar, S. B. Pacharne, S. S. Kabade and P. R.Rajarapollu, "Design and implementation of next generation Smart car," 2016 International Conference on Automatic Control and Dynamic Optimization Techniques (ICACDOT), Pune, 2016, pp. 508-512.[5]P. Joosen, V. Exadaktylos and D. Berckmans, "Aninvestigation on mental stress-profiling of race car drivers during a race," 2015 IEEE 12th International Conference on Wearable and Implantable Body Sensor Networks (BSN), Cambridge, MA, 2015, pp. 1-4.[6]Suhas Katkar, Mahesh Manik Kumbhar, Priti NavanathKadam, “Accident Prevention System Using Eye Blink Sensor,” International Research Journal of Engineering and Technology (IRJET) Volume-03 Issue-05, May-2016. [7]Prof. R.A.Jain, Aditya Patil, Prasenjeet Nikam, ShubhamMore, Saurabh Totewar, “Women’s safety using IOT,”International Research Journal of Engineering and Technology (IRJET) Volume-04 Issue-05, May-2017 [8]Vyas Viral M, Viraj Choksi, M.B. Potdar, “Car SafetySystem Enhancements using theInternet of Things (IoT),”International Research Journal of Engineering and Technology (IRJET) Volume-04 Issue-12, Dec-2017 [9]Mrs Smita Desai Miss. Shreya Desai, “Smart VehicleAutomation,” IJCSMC, Vol. 6, Issue. 9, September 2017, pg.46 – 50.。
上海滑德斐湃Low Cost360°无人机机载超声测得计入介绍膊单册说明书

w w w . slamt ec. comRPLIDAR A2 Low Cost 360 Degree Laser Range Scanner Introduction and DatasheetModel: A2M12OPTMAG16K2022-04-08 rev.1.0CONTENTS (1)INTRODUCTION (3)S YSTEM CONNECTION (3)M ECHANISM (4)S AFETY AND S COPE (6)D ATA O UTPUT (7)H IGH S PEED S AMPLING P ROTOCOL AND C OMPATIBILITY (7)A PPLICATION S CENARIOS (8)SPECIFICATION (9)M EASUREMENT P ERFORMANCE (9)L ASER P OWER S PECIFICATION (9)O PTICAL W INDOW (10)C OORDINATE S YSTEM D EFINITION OF S CANNING D ATA (10)C OMMUNICATION INTERFACE (11)MISC (14)SELF-PROTECTION AND STATUS DETECTION (15)SDK AND SUPPORT (16)MECHANICAL DIMENSIONS (17)REVISION HISTORY (18)APPENDIX (19)I MAGE AND T ABLE I NDEX (19)IntroductionThe RPLIDAR A2M12 is the next generation low cost 360 degree 2D laser scanner (LIDAR) solution developed by SLAMTEC. It can take up to 16000 samples of laser ranging per second with high rotation speed. And equipped with SLAMTEC patented OPTMAG technology, it breakouts the life limitation of traditional LIDAR system so as to work stably for a long time.The system can perform 2D 360-degree scan within a 12-meter range. The generated 2D point cloud data can be used in mapping, localization and object/environment modeling.The typical scanning frequency of RPLIDAR A2M12 is 10Hz(600rpm), and the frequency can be freely adjusted within the 5-15Hz range according to the specific requirements. With the 10Hz scanning frequency, the sampling rate is 16kHz and the angular resolution is 0.225°.Due to the improvements in SLAMTEC hardware operating performance and related algorithm, RPLIDAR A2M12 works well in all kinds of indoor environment and outdoor environment without direct sunlight. Meanwhile, before leaving the factory, every RPLIDAR A2M12 has passed the strict testing to ensure the laser output power meet the eye-safety standard of IEC-60825 Class 1.System connectionThe RPLIDAR A2M12 consists of a range scanner core and the mechanical powering part which makes the core rotate at a high speed. When it functionsnormally, the scanner will rotate and scan clockwise. And users can get the range scan data via the communication interface of the RPLIDAR and control the start, stop and rotating speed of the rotate motor via PWM.Range Scanner CoreCommunicationand PowerInterface MechanicalPowering PartFigure 1-1 RPLIDAR System CompositionThe RPLIDAR A2M12 comes with a rotation speed detection and adaptive system. The system will adjust the angular resolution automatically according to the actual rotating speed. And there is no need to provide complicated power system for RPLIDAR. In this way, the simple power supply schema saves the BOM cost. If the actual speed of the RPLIDAR is required, the host system can get the related data via communication interface.The detailed specification about power and communication interface can be found in the following sections.MechanismThe RPLIDAR A2M12 is based on laser triangulation ranging principle and adopts the high-speed vision acquisition and processing hardware developed by SLAMTEC. The system ranges more than 16000 times per second.During every ranging process, the RPLIDAR emits modulated infrared laser signal and the laser signal is then reflected by the object to be detected. The returning signal is then sampled by vision acquisition system in RPLIDAR and the DSPembedded in RPLIDAR starts processing the sample data and outputs distance value and angle value between object and RPLIDAR via communication interface.dFigure 1-2 The RPLIDAR Working SchematicWhen drove by the motor system, the range scanner core will rotate clockwise and perform the 360-degree scan for the current environment.Figure 1-3 The Obtained Environment Map from RPLIDAR ScanningSafety and ScopeThe RPLIDAR A2M12 system uses a low power infrared laser as its light source, and drives it by using modulated pulse. The laser emits light in a very short timeframe which can ensure its safety to human and pet, and it reaches Class I laser safety standard. Complies with 21 CFR 1040.10 and 1040.11 except for deviations pursuant to Laser Notice No. 50, dated June 24, 2007.Caution : Use of controls or adjustments or performance of procedures other than those specified herein may result in hazardous radiation exposure.The modulated laser can effectively avoid the interference from ambient light and sunlight during ranging scanning process, which makes RPLIDAR work excellent in all kinds of indoor environment and outdoor environment without direct sunlight.*Note :The LIDAR scan image is not directly relative to the environment showed here. Illustrative purpose only.Class IData OutputDuring the working process, the RPLIDAR will output the sampling data via the communication interface. And each sample point data contains the information in the following table. If you need detailed data format and communication protocol, please contact SLAMTEC.Figure 1-4 The RPLIDAR Sample Point Data InformationFigure 1-5 The RPLIDAR Sample Point Data FramesThe RPLIDAR outputs sampling data continuously and it contains the sample point data frames in the above figure. Host systems can configure output format and stop RPLIDAR by sending stop command. For detailed operations please contact SLAMTEC.High Speed Sampling Protocol and CompatibilityThe RPLIDAR A2M12 adopts the newly extended high speed sampling protocol for outputting the 16000 times per second laser range scan data. Users areData TypeUnitDescriptionDistance mm Current measured distance value between the rotating core of the RPLIDAR and the sampling point Heading degree Current heading angle of the measurement Start Flag (Bool) Flag of a new scanChecksumThe Checksum of RPLIDAR return data…(d ሾn −1ሿ,θሾn −1ሿ)(d ሾn ሿ,θሾn ሿ) (d ሾ0ሿ,θሾ0ሿ) (d ሾ1ሿ,θሾ1ሿ)…Start FlagA new scanrequired to update the matched SDK or modify the original driver and use the new protocol for the 16000 times per second mode of RPLIDAR A2M12. Please check the related protocol documents for details.RPLIDAR A2M12 is compatible with all communication protocols used by previous RPLIDAR products. Users can directly replace the previous model of RPLIDAR and use it directly on the original system.Application ScenariosThe RPLIDAR can be used in the following application scenarios:General robot navigation and localizationEnvironment scanning and 3D re-modelingService robot or industrial robot working for long hoursHome service /cleaning robot navigation and localizationGeneral simultaneous localization and mapping (SLAM)Smart toy’s localization and obstacle avoidanceMeasurement PerformanceFigure 2-1 RPLIDAR PerformanceNote: the triangulation range system resolution changes along with distance. Laser Power SpecificationFigure 2-2 RPLIDAR Optical SpecificationNote: the laser power listed above is the peak power and the actual average power is much lower than the value.Optical WindowTo make the RPLIDAR A2M12 working normally, please ensure proper space to be left for its emitting and receiving laser lights when designing the host system. The obscuring of the host system for the ranging window will impact the performance and resolution of RPLIDAR A2M12. If you need cover the RPLIDAR A2M12 with translucent materials or have other special needs, please contact SLAMTEC about the feasibility.Optical WindowFigure 2-3 RPLIDAR Optical WindowYou can check the Mechanical Dimensions chapter for detailed window dimensions.Coordinate System Definition of Scanning DataThe RPLIDAR A2M12 adopts coordinate system of the left hand. The dead ahead of the sensors is the x axis of the coordinate system; the origin is the rotating center of the range scanner core. The rotation angle increases as rotating clockwise. The detailed definition is shown in the following figure:Figure 2-4 RPLIDAR Scanning Data Coordinate System DefinitionCommunication interfaceThe RPLIDAR A2M12 uses separate 5V DC power for powering the range scanner core and the motor system. And the standard RPLIDAR A2M12 uses XH2.54-5P male socket. Detailed interface definition is shown in the following figure:Figure 2-5 RPLIDAR Power Interface Definitionθ ሾ0,360)Interface LeadRedXH2.54-5PVCCTXRXGND MOTOCT LFigure 2-6 RPLIDAR External Interface Signal DefinitionPower Supply InterfaceRPLIDAR A2M12 takes the only external power to power the range scanner core and the motor system which make the core rotate. To make the RPLIDAR A2M12 work normally, the host system needs to ensure the output of the power and meet its requirements of the power supply ripple.Figure 2-7 RPLIDAR Power Supply SpecificationNote: When the lidar is connected to the power supply, there is a process of charging the input capacitor. The maximum transient current of charging canreach 2500mA. After stable operation, the working current does not exceed 600mA.Data communication interfaceThe RPLIDAR A2M12 takes the 3.3V-TTL serial port (UART) as the communication interface. The table below shows the transmission speed and the protocol standard.Figure 2-8 RPLIDAR Serial Port Interface SpecificationsNote: the RX input signal of A2M12is current control type. In order to ensure the reliable signal identification inside the system, the actual control node voltage of this pin will not be lower than 1.6v.Scanner Motor ControlThe RPLIDAR A2M12 is embedded with a motor driver which has speed tuning feature. Users can control the start, the stop and the rotating speed for the motor via MOTOCTL in the interface. MOTOCTL can be supplied using PWM signal with special frequency and duty cycle, and in this mode, the rotating speed is decided by the duty cycle of the input MOTOCTL PWM Signal.The following table describes the requirement for the input PWM signal of MOTOCTL:Figure 2-9 RPLIDA Specification for PWM Signal of MOTOCTLNote: the typical value is tested when the scanner rotating frequency is 10Hz. With the same rotating speed, the PWM duty cycle of every RILIDAR A2M12 may vary slightly. If a precise rotating speed is required, users can perform a closed-loop control.If the host system only need to control the start and stop of the motor, please use the direct current signal in high level and low level to drive MOTOCTL. Under this condition, when the MOTOCTL is the low level signal, the RPLIDAR A2M12 will stop rotating and scanning; when the MOTOCTL is the high level signal, the RPLIDAR A2M12 will rotated at the highest speed.MISCFigure 2-10 RPLIDAR MISC SpecificationTo ensure the laser of RPLIDAR always working in the safety range (<3mW) and avoid any other damage caused by device, the RPLIDAR comes with laser power detection and sensor healthy check feature. It will shut down the laser and stop working automatically when any of the following errors has been detected. Laser transmit power exceeds limited valueLaser cannot power on normallyScan speed of Laser scanner system is unstableScan speed of Laser scanner system is too slowLaser signal sensor works abnormallyThe host systems can check the status of the RPLIDAR via the communication interface and restart the RPLIDAR to try to recover work from error.To facilitate the usage of RPLIDAR A3 in the product development and speed up the development cycle for users, SLAMTEC has provided the Framegrabber plugin in RoboStudio for testing and debugging as well as the SDK available under Windows, x86 Linux and Arm Linux. Please contact SLAMTEC for detail information.Figure 4-1 the Framegrabber Plugin in RoboStudioThe mechanical dimensions of the RPLIDAR A2M12 are shown as below:Figure 5-1 RPLIDAR Mechanical DimensionsNote: the 4 M3 screws in the bottom should be no longer than 4mm, or the internal module would be damaged.Image and Table IndexF IGURE 1-1RPLIDAR S YSTEM C OMPOSITION (4)F IGURE 1-2T HE RPLIDAR W ORKING S CHEMATIC (5)F IGURE 1-3T HE O BTAINED E NVIRONMENT M AP FROM RPLIDAR S CANNING (6)F IGURE 1-4T HE RPLIDAR S AMPLE P OINT D ATA I NFORMATION (7)F IGURE 1-5T HE RPLIDAR S AMPLE P OINT D ATA F RAMES (7)F IGURE 2-1RPLIDAR P ERFORMANCE (9)F IGURE 2-2RPLIDAR O PTICAL S PECIFICATION (9)F IGURE 2-3RPLIDAR O PTICAL W INDOW (10)F IGURE 2-4RPLIDAR S CANNING D ATA C OORDINATE S YSTEM D EFINITION (11)F IGURE 2-5RPLIDAR P OWER I NTERFACE D EFINITION (11)F IGURE 2-6RPLIDAR E XTERNAL I NTERFACE S IGNAL D EFINITION (12)F IGURE 2-7RPLIDAR P OWER S UPPLY S PECIFICATION (12)F IGURE 2-8RPLIDAR S ERIAL P ORT I NTERFACE S PECIFICATIONS (13)F IGURE 2-9RPLIDA S PECIFICATION FOR PWM S IGNAL OF MOTOCTL (14)F IGURE 2-10RPLIDAR MISC S PECIFICATION (14)F IGURE 3-1 THE L IDARS P LUGIN IN R OBO S TUDIO (16)F IGURE 4-1RPLIDAR M ECHANICAL D IMENSIONS (17)Manufacturer: SHANGHAI SLAMTEC CO., LTD.Address: D-501 Shengyin Tower, 666 Shengxia Rd., Shanghai, ChinaMade in China。
UAVP 汉语手册

手册用於建造與操作專業的悬停平台特征这项发展的目标是要建造一个普遍的悬停平台包括以下特征:单一电子板,额外的元件有馬達,馬達控制器,遥控系统和机身/框架电缆布线容易防干扰设计,不需要特别错综复杂的技能可編程信號更新(到250 hz)自定义设置为不同的马达/控制器/螺旋桨组合另外2个遥控渠道为控制伺服机(照相机角度)7组LED驱动渠道,每一组可驱动500mA!音响信号作为低电池,无线信号中断警告和寻找指引陀螺仪:3陀螺模块adxrs300/150(推荐)或1x adxrs300/150和1xidg300可通過RS232 或遥控-发射机更改編程參量失去控制时自动降落伞系统触发器可选数码加速度传感器lis3lv02dq可选数字指南针传感器hmc6352可选数字气压传感器smd500可选全球衛星定位(在开发中:GPS (ublox)选择项允许某种程度的个人宁愿,一些选项可以选择或省略。
在所有情况下,这些选项可以在以后添加或删除。
但是一些选项会对其它的选择宁愿有影响。
所需的部分元件会在建造程序中的每个选项中分别提及零件名单基本远程控制模型设备4 X 无刷马达2 X 顺时针方向转螺旋桨(即epp1045或其他,与使用的马达相合适)2 X 逆时针方向转螺旋桨(即epp1045或其他,与使用的马达相合适)4 X 无刷控制器(PWM 或TWI/i2c),与马达的电力要求相同,yge I系列或Holger’s i2c 控制器。
这些无刷控制器给予很好的表现,但其他模式也可以使用。
1 x 简单的5渠道无线电发射,接收器(推荐7渠道)或者也可以用有PPM复合输出的接收器电子零件为了节省空间和重量,大部分的电子元件是SMD封装。
用铅笔型烙铁和稳定的手,贴片零件是很容易焊接的. 全部电子元件都是标准零件及包装.1 X 印刷电路板,在www.lipoly.de 或 购买1 × U1 pic16f876或876a (dil28 ,165117 )与目前的Hex文件编程,预先编程的芯片可以由作者或www.lipoly.de 或 购买1 x U2 TPIC6B595N (DIL20)1 × U3 tl431稳压器(TO92)1 X 石英16 MHz (hc49u )6 x R1,R2,R3,R18,R19,R23 SMD 电阻器10k 5% (0805)15 x R6,R7,R8,R10,R11,R12,R13,R14,R15,R21,R17,R24,R25,R26,R27 SMD 电阻器4,7k 5% (0805)3 x R4,R9,R20 SMD 电阻器1k 5% (0805)1 x R5 SMD 电阻器2,2k (0805)1 x R22 SMD 电阻器68 5% (0805)4 x R28,R29,R30,R31 SMD 电阻器180 5% (0805)1 x R16 SMD 电阻器100 5% (0805)4 x D1,D2,D3,D4 SMD-二极管LL4148 (SOD80) 注意PCB的方向!1 x D5 SMD LED 蓝色30mA, PLCC21 x D6 SMD LED 红色30mA, PLCC21 x D7 SMD LED 绿色30mA, PLCC21 x D8 SMD LED 黄色30mA, PLCC23 x Q1, Q2, Q3 NPN 晶体管BC548B 或相似的(TO92)4 x C1, C2, C6, C7 SMD 电容器100nF (0805)2 x C4, C5 SMD 电容器22pF (0805)2 x C8, C9 SMD 钽电容器1μF1 x C3两极电容器100μF 10V, 辐形包装, 注意PCB 的方向!1 × L1的电感线圈100至220 μ h ,0,1A ,轴向包装1x 所有K 36pin 插针式连接器RM2,54 平直,被金镀锌, 可拆2x 所有K 12pin 插座连接器RM2,54 平直, 可拆2X U1 IC 插座dil14 (2个安装一排做成dil28 )选择"LEDs"大家都希望有所不同照明效果任何类型的LED 都可以。
AlphaPilot 自动驾驶系统说明书
www.jrc.amAlphaPilotSimple, scalable and smart steeringAutopilot• 5-inch color LCD touch display • Modular and most flexible system • Intuitive user experience • Uniform product philosophy • Fully self adjusting • Adaptive control technology • High quality hardware design• Heading monitor system functionality • Fuel saving• Various operating modesFeaturesOur new adaptive autopilot features a 5-inch touch display with the hardware and software based on our uniform product philosophy, creating a consistent bridge and operational approach. The advanced track steering technology contributes to safe and efficient operation, defined by its simplicity in usage.Fully self-adjustingThe AlphaPilot is a modular, type approved heading control system designed to fit vessels of any size, including high speed crafts. This modern and technologically advanced control unit is intended to reduce the operator’s workload, increase the vessel motion efficiency and improve operational safety. The AlphaPilot is easy to install and has a fully self-adjusting ‘auto-tune’ algorithm which automatically estimates ships’ dynamics and allows it to easily adapt control settings, rudder gain and counter rudder as required to continually provide the best possiblesteering performance.Thanks to our experience and feedback of our customers and engineers, we designed our newAlphaPilot as a modular system with standard components that makes it easy to install, commission and to maintain. The new AlphaPilot had to be deployable as a small system as heading control system up to an advanced and complex autopilot system with multiple positions and to control main steering. The result is a system consists of following building blocks:v AlphaPilot control panelv MCU box (Main Control Unit)v MCU MS box (Main Control Unit Main Steering)v Mode switches, tillers, hand wheels and rudder feedback unitsWith only these components, one is able to design a system for the demands of the customers.Tillers & SwitchesThe tillers are required for steering and switches for selecting steering modes. As an additional safety feature, the tiller in command will lit. All tillers and switches have dimmer and mute buttons. The modules have an aluminum base fitted with a dedicated PCB and a splash-proof film coating on the front. The modules are connected via CAN bus for communicating with the main control unit.Follow-up (FU) tiller Non-follow-up (NFU) 2 Position mode switch Single rudder hand wheel Follow up (FU) tiller ROT Follow up (FU) tiller S/I3 Position mode switchFeaturesHand wheel2 pos. mode switch3 pos. mode switchNFUFUtiller FU tiller ROT FU tiller S/IFU mode (take over)v vvv v Central dimmer buttonsv v v v v v v Buzzer disable button vvvvvv vROT mode vSYNC mode v INDEP modev NFU mode (take over)v v vAuto/Follow up modevvDouble rudder hand wheelModes of operationThe AlphaPilot is easy to operate via an intuitive 5-inch color touchscreen display which will give the operator a clear presentation of information. The user-friendly menu and parameters can be accessed and changed by using the touch screen, rotary button or, in case of the AlphaTrackPilot, multi-functionaljoystick.Current heading (from compass)Compass in useSpeed data Info field displays:Alert status & alert messageSteering by mode Current Rate-Of-Turn value Current controlmodeMode ExplanationStandby AlphaPilot is in stand-by or manual mode and does not control steering or rudders as control is overriddenAutoAuto mode or automatic heading control activates the autopilot and steers the vessel to the reference course. When wind/current will push the vessel off course, the AlphaPilot will counteract.Dodge The dodge mode is a short-term switchover from auto mode to the manual rudder control.Override The overide mode will give intentional fast change-over from automatic to temporary manual FU steering from external FU wheel or FU Tiller.CTS PilotCourse to steer or CTS mode is an estimated course that a vessel should steer in order to arrive at a waypoint or bearing and stay on ground track.ROT modeIn this mode the AlphaPilot is switched over to manual ROT (rate-of-turn) steering via a knob on the control panel or activated on an external FU/ROT tiller. This mode is also known as ‘Rivermode’.TrackTrack control mode (also referred to as “track steering”), combines an ECDIS with the autopilot.The navigator can program a voyage plan into the ECDIS that contains one or more tracks.Autolow speedheadingcontrolThe AlphaPilot can operate in automatic low speed heading control mode, using one or twotunnel thrusters in “AUTO” control mode.Way point 1Way point 2Control panelControl panelsG-004459 AlphaPilot MFM GYG-004460 Alphapilot MFM BKMCU BoxThe control panel is connected to the Main Control Unit box. This box is the central aggregation unit toBesides size, the main difference between a MCU box and the MCU MS box is that the MCU box will be connected to a steering system while the MCU MS box is directly connected to the steering gear.Stearing gear interfaceserminals to connect different steering gear interfaces:Proportional valvesYour choices• AlphaPilot• Main Control Unit• Main Control Unit - Main Steering • Additional Control Unit• Additional Control Unit - Main Steering • Mode Switch 2 Positions • Mode Switch 3 Positions • FU Tiller• FU Tiller Sync/Indep • FU Tiller ROT • NFU Tiller• Hand wheel Single Rudder • Hand wheel T win RudderAccessories• Rudder feedback unit HD (with limit switches)• Rudder feedback unit MD• Linkage Transmission for Rudder Feedback Unit • Chain Transmission for Rudder Feedback Unit • IP56 kit for displayRudder feedback unitsThe rudder feedback units consist of aluminum housing and are available as medium or heavy-duty versions. The output can be connected to the analog module or directly to the MCU box. The rudder feedback units contain a potentiometer, which is proportional to the rudder angle. Next to this, the heavy-duty version contains additional limit switches.The rudder feedback units can be mechanically coupled to the rudder post by chain or atransmission link. The continuously transmitted accurate rudder angle data will be received by the analog interface. It converts the analog signal to a digital Modbus and IEC61162-1 signal and can be transmitted to any AlphaLine Repeater display capable of displaying graphical rudder information.System diagramNo vessel is the same and different setup may be required by taking single rudder, twin rudder, bow thruster and multi position steering options into account. The AlphaPilot can be used in various configurations. Below two example diagrams of the many options you can choose.Single rudder, only Alphapilot #1T win rudder, multiple positionTech SpecsFU TillerG-004472 Weight 0.8 kg (1.76 lbs)Mode Switch 2 PosG-004466 Weight 0.8 kg (1.76 lbs)RoHSRoHSNFU TillerG-004470 Weight 0.8 kg (1.76 lbs)FU Tiller Sync/IndepG-004474 Weight 0.8 kg (1.76 lbs)RoHSMode Switch 3 PosG-004468 Weight 0.8 kg (1.76 lbs)RoHSFU Tiller ROTG-004476 Weight 0.8 kg (1.76 lbs)RoHSRoHS180 mm (7.08 in)10 mm (0.39 in)10 mm (0.39 in)180 mm (7.08 in)96 mm (3.78 in)82 mm (3.23 in)46 mm(1.81 in)180 mm (7.08 in)10 mm (0.39 in)96 mm (3.78 in)82 mm(3.23 in)69 mm(2.72 in)180 mm(7.08 in)180 mm (7.08 in)180 mm (7.08 in)Hand wheelG-006620/G-006622 SR/TR Weight 1.8 kg (3.97 lbs) MCU BoxWeight 3.5 kg (7.72 lbs)G-004463 ACU Box Weight 3.5 kg (7.72 lbs)RoHSRoHSRFU HDG-002344 Weight 6 kg (13.22 lbs)Control PanelG-004460Weight 1.2 kg (2.65 lbs)MCU MS BoxG-004462Weight 5.5 kg (12.13 lbs)G-004464 ACU MS Box Weight 5.5 kg (12.13 lbs)RoHSRoHSRFU MDG-002345 Weight 4.2 kg (9.25 lbs)RoHS RoHS440 mm(17.32 in)85 mm(3.35 in)263 mm(10.35 in)330 mm(12.99 in)85 mm(3.35 in)263 mm(10.35 in)180 mm(7.08 in)44 mm(1.73 in)180 mm(7.08 in)72 mm(2.73 in)24 mm(0.94 in)Ø 170 mm(Ø 6.69 in)240 mm(9.44 in)40 mm(1.57 in)Ø 20 mm(Ø 0.78 in)190 mm(7.48 in)Ø 190 mm(Ø 7.48 in)Ø 170 mm(Ø 6.69 in)Ø 190 mm(Ø 7.48 in)190 mm(7.48 in)130 mm(5.11 in)40 mm(1.57 in)Ø 20 mm(Ø 0.78 in)www.jrc.amCenters of ExcellenceHouston, Rotterdam, Singapore, T okyo© All rights reserved, JRC/AM -18.012/225/2 Product and/or specifications could change without notice。
ArduPilot自动驾驶仪中文手册(待完稿)

ArduPilot 自动驾驶仪手册一、简介系统构成:1、一块ArduPilot Mega板(红色)2、一块ArduPilot Mega IMU板(红色)3、一套 MediaTek GPS 或者 uBlox GPS模块4、若干根接收机连接线及配套的插线,如果需要使用系统的自动驾驶和功能,推荐使用8通道接收机5、一套Xbee数传电台,一块Xbee数传电台与ArduPilot Mega IMU,另一块通过适配器与PC相连(提醒:因传送的数据量大,推荐配置空中速率位57600bps的数传电台,低速率数传电台将会导致严重的数据丢包现象)。
仔细阅读本手册,将有利于调试自动驾驶仪。
作为一套开源的自动驾驶仪,我们支持第三方传感器的接入,如空速计、电子罗盘等,这意味着您必须对本系统进行正确的参数设置,才能安全飞行。
二、快速入门指南(一)电路板的组装所需材料及工具:MEGA 板和IMU板各一块;板件连接插件若干;带连线的GPS模块(推荐4HZ);烙铁;焊丝等1、焊接MEGA机IMU板上的元器件2、对应安装好两块板子之间的连接插件3、两块板子相插4、连接GPS模块之后的样子,注意:GPS模块连接在红色MEGA板子上,而非蓝色IMU板子上的接口,IMU的6芯接口用于连接诸如电子罗盘等外接传感器。
(二)如何连接1、系统连接图其中,自动驾驶仪控制通道为第八通道,利用三段开关进行模式切换。
2、安装示意图因IMU板载三轴传感器,系统安装时需充分考虑到减震,尽量使其在飞机上水平安装,且安装方向应如上图所示。
3、DIP开关的使用因为接收机和配置文件之间会存在差异,可能会导致舵机出现反向工作,这时你可以通过拨动DIP开关进行修正,而非通过复杂的参数修改进行修正。
三、编程(一)所需工具1、MINI USB数据线,用于ardupilot与PC的相连。
2、配置软件arduino,下载地址/en/Main/Software(二)如何通过arduino进行编程1、通过USB连接arduino与PC,同时根据提示安装FT232RL驱动,并记下串口号。
FURUNO FEA-2x07 自动驾驶系统操作手册说明书
Electronic Chart Display and Information System (ECDIS)OPERATOR'S MANUALwww.furuno.co.jpMODEL FEA-2107 FEA-2107-BB FEA-2107-D FEA-2807FEA-2807-DInstructions for use with Autopilots: FAP-2000PT -500A(CAT B, CAT C) PR-6000The paper used in this manualis elemental chlorine free.9-52 Ashihara-cho,Nishinomiya, 662-8580, JAPANForewordThe purpose of this manual is to provide the instructions for how to use the Autopilots FAP-2000,PT-500A(CAT B and CAT C)1 and PR-60002 with the FURUNO FEA-2107-D, FEA-2107-BB-D, FEA-2807-D Electronic Chart Display and Information System (ECDIS). For ECDIS operating information, see its Operator's Manual.1 PT-500A(CAT B and CAT C) are products of YOKOGAWA ELECTRIC CORPORATION.2 PR-6000 is a product of TOKYO KEIKI INCImportant Notices• The operator of this equipment must read and follow the descriptions in this manual. Wrong operation can cancel the warranty or cause injury.• Do not copy any part of this manual without written permission from FURUNO.• If this manual is lost or worn, contact your dealer about replacement.• The contents of this manual and equipment specifications can change without notice.• The example screens (or illustrations) shown in this manual can be different from the screens you see on your display. The screens you see depend on your system configuration and equipment settings.• Save this manual for future reference.• Any modification of the equipment (including software) by persons not authorized by FURUNO will cancel the warranty.• All brand and product names are trademarks, registered trademarks or service marks of their respective holders.iSafety Instructionsiiabout replacement.ype: 86-003-1011-0Safety InstructionsTable of ContentsSYSTEM CONFIGURATION (vii)1.FURUNO Autopilot FAP-2000..............................................................................................1-11.1Introduction.............................................................................................................................1-11.2Control Panel...........................................................................................................................1-11.3Steering Modes........................................................................................................................1-31.3.1Hand steering modes..................................................................................................1-31.3.2Autopilot steering modes............................................................................................1-31.3.3Route steering modes..................................................................................................1-51.4Additional Information About Steering Modes....................................................................1-161.5Important Information About Steering Mode Changes......................................................1-181.6Autopilot Display in Sidebar.................................................................................................1-191.7Expected Steering Performance Under Various Conditions...............................................1-201.7.1Expected steering performance for going ahead.....................................................1-201.7.2Expected steering performance for turns................................................................1-231.8Expected Steering Performance Under Critical Failure.....................................................1-251.8.1Lost heading from autopilot (ECDIS may also have lost heading)........................1-251.8.2Lost heading from ECDIS (autopilot still has heading).........................................1-251.8.3Lost speed..................................................................................................................1-261.8.4Low speed..................................................................................................................1-261.8.5Lost SOG/COG reference..........................................................................................1-271.8.6Total lost position......................................................................................................1-281.8.7Lost differential position..........................................................................................1-291.8.8Lost differential position and position discrepancy................................................1-301.8.9Lost communication between ECDIS and autopilot...............................................1-301.8.10Lost communication between autopilot and ECDIS...............................................1-301.9Other Operations...................................................................................................................1-311.10Alerts......................................................................................................................................1-311.10.1Alerts generated by autopilot...................................................................................1-311.10.2Alerts generated by ECDIS......................................................................................1-321.10.3Error alerts generated by autopilot.........................................................................1-371.11How to Use the Curved EBL.................................................................................................1-381.11.1What is the curved EBL?..........................................................................................1-381.11.2Structure of the curved EBL.....................................................................................1-391.11.3How to design a new turn while the ship is turning...............................................1-391.12How to Use the Predictor......................................................................................................1-402.YOKOGAWA Autopilot PT-500A (category B).......................................................................2-12.1Introduction.............................................................................................................................2-12.2Steering Control Unit..............................................................................................................2-12.3Steering Modes........................................................................................................................2-22.3.1Hand steering mode (Mode selector: HAND)............................................................2-22.3.2Autopilot steering mode (Mode selector: AUTO).......................................................2-22.3.3Route steering mode (Mode selector: NAVI)..............................................................2-22.4Other Operations...................................................................................................................2-102.5Alerts Generated by ECDIS..................................................................................................2-102.5.1Operational alerts.....................................................................................................2-102.5.2Error alerts................................................................................................................2-132.6Autopilot Display in Sidebar.................................................................................................2-142.7Expected Steering Performance Under Various Conditions...............................................2-152.7.1Expected steering performance for going ahead.....................................................2-152.7.2Expected steering performance for turns................................................................2-162.8Expected Steering Performance Under Critical Failure.....................................................2-172.8.1Lost heading from autopilot (ECDIS may also have lost heading)........................2-172.8.2Lost heading from ECDIS (autopilot still has heading).........................................2-17iiiTable of Contentsiv2.8.3Lost speed..................................................................................................................2-182.8.4Low speed..................................................................................................................2-192.8.5Total lost position......................................................................................................2-202.8.6Lost differential position and position discrepancy................................................2-212.8.7Lost communication between ECDIS and autopilot...............................................2-222.8.8Lost communication between autopilot and ECDIS...............................................2-22 2.9How to Use the Curved EBL.................................................................................................2-23 2.10How to Use the Predictor......................................................................................................2-243.YOKOGAWA Autopilot PT-500A (category C).......................................................................3-13.1Introduction..............................................................................................................................3-13.2Steering Control Unit..............................................................................................................3-13.3Steering Modes.........................................................................................................................3-23.3.1Hand steering mode (Mode selector: HAND)............................................................3-23.3.2Autopilot steering mode (Mode selector: AUTO).......................................................3-23.3.3Route steering mode (Mode selector: NAVI)..............................................................3-23.4Other Operations...................................................................................................................3-113.5Alerts Generated by ECDIS..................................................................................................3-123.5.1Operational alerts.....................................................................................................3-123.5.2Error alerts................................................................................................................3-123.6Autopilot Display in Sidebar.................................................................................................3-133.7Expected Steering Performance Under Various Conditions...............................................3-143.7.1Expected steering performance for going ahead.....................................................3-143.7.2Expected steering performance for turns................................................................3-153.8Expected Steering Performance Under Critical Failure.....................................................3-163.8.1Lost heading from autopilot (ECDIS may also have lost heading)........................3-163.8.2Lost heading from ECDIS (autopilot still has heading).........................................3-163.8.3Lost speed..................................................................................................................3-173.8.4Low speed..................................................................................................................3-173.8.5Lost SOG/COG reference in GoAW mode................................................................3-183.8.6Total lost position......................................................................................................3-183.8.7Lost differential position in GoAW mode.................................................................3-193.8.8Lost differential position and position discrepancy................................................3-203.8.9Lost communication between ECDIS and autopilot...............................................3-213.8.10Lost communication between autopilot and ECDIS...............................................3-213.9How to Use the Curved EBL.................................................................................................3-214.TOKYO KEIKI Autopilot PR-6000.......................................................................................4-14.1Introduction..............................................................................................................................4-14.2Steering Control Unit..............................................................................................................4-14.3Steering Modes.........................................................................................................................4-24.3.1Hand steering mode (Mode selector: HAND)............................................................4-24.3.2Autopilot steering mode (Mode selector: AUTO).......................................................4-34.3.3Non-Follow-Up steering mode (Mode selector: NFU)...............................................4-34.3.4Remote hand steering mode (Mode selector: RC)......................................................4-44.3.5Steering override units...............................................................................................4-54.3.6Route steering mode, RC/Nav (Mode: RC).................................................................4-64.4HCS Unit Controls.................................................................................................................4-174.5Alerts Generated by ECDIS..................................................................................................4-184.5.1Operational alerts.....................................................................................................4-184.5.2Error alerts................................................................................................................4-184.6Autopilot Display in Sidebar.................................................................................................4-194.7Expected Steering Performance Under Various Conditions...............................................4-214.7.1Expected steering performance for going ahead.....................................................4-214.7.2Expected steering performance for turns................................................................4-224.8Expected Steering Performance Under Critical Failure.....................................................4-244.8.1Lost heading from autopilot (ECDIS may also have lost heading).......................4-244.8.2Lost heading from ECDIS (autopilot still has heading).........................................4-244.8.3Lost speed..................................................................................................................4-254.8.4Low speed..................................................................................................................4-25Table of Contentsv4.8.5 Lost SOG/COG reference in GoAW steering mode .................................................4-26 4.8.6 Total lost position......................................................................................................4-26 4.8.7 Lost differential position in GoAW steering mode..................................................4-27 4.8.8 Lost differential position and position discrepancy................................................4-27 4.8.9 Lost communication between ECDIS and autopilot...............................................4-28 4.8.10 Lost communication between autopilot and ECDIS...............................................4-28 4.9 How to Use the Curved EBL.................................................................................................4-29 4.10 How to Use the Predictor......................................................................................................4-30Index..........................................................................................................................................IN-1Table of ContentsThis page intentionally left blank. viSYSTEM CONFIGURATIONSingle workstationviiSystem Configurationviii Multi workstation: M A N D A T O R Y: A L T E R N A T I V E : O P T I O N A L : O P T I O N A L , B U T N O T U S E D B Y T C S : E X T E R N A L S E N S O R o r E Q U I P M E N TN o t e 1 A l t e r n a t i v e s a r e , G y r o c o m p a s s b y I E C 61162 o r S t e p p e rN o t e 2 A l t e r n a t i v e s a r e , L o g b y I E C 61162 o r 200p /n m1. FURUNO AutopilotFAP-20001.1 IntroductionThis chapter describes the steering functions available with the FURUNO Autopilot FAP-2000.1.2 ControlPanelThis section describes the FAP-2000's control panel.FURUNO1-6: Steering mode selection• PROGRAM TRACK:Program Track-controlled heading change using set radius. Also for steering with selected TT models.• GOTO TRACK:Track-controlled route steering• GOTO WPT: Course-controlled route steering• HEADING CONTROL: Immediate heading-controlled course change using set rudder angle limit• RADIUS CONTROL: Immediate radius-controlled course change using set radius• PROGRAM HEADING CHANGE: Program heading-controlled course change using set radius1-11. FURUNO Autopilot FAP-20007: Loading condition indicator: Loading conditions, Light, Medium or Loaded8: Performance indicator:Performance status, Economy, Medium or Precise9: Status indicator: Shows selected mode and state of readiness:• FAP-2000 in operation: READY• FAP-2000 control mode: HEADING/TRACK• FAP-2000 route steering: ROUTE• FAP-2000 track-controlled turn: TURN10: Alert indicator and buzzer cancel• ALERT lamp for other FAP-2000-related alerts and errors.• RESET button for acknowledging other FAP-2000-related alerts and errors.11: Special function keypads• Manually input speed.• Adjust panel dimmer.• Set manual speed value, auto speed, rudder limit function, performance and conditions.12: Tiller• Set course and radius.• PORT and STBD lamps show when the tiller can be used to set course.• INCREASE. and DECREASE. lamps show when the tiller can be used to set a radius or a rudder angle limit. 13: Gyro reading and a bar graph showing rate of turn14: Set Heading display includes:• Off course alert• Turn side• Rudder-on limit indication15: Rudder displays:• Radius set-point in the Radius Control mode• Rudder limit in the Heading Control mode• AUTO LIMIT lamp lights to indicate selection of automatic rudder limit function.16: Speed displays:• ROT in the Radius Control mode• Speed in the Heading Control mode• Speed warning indicator (LOG FAILURE or LOW)1-21. FURUNO Autopilot FAP-20001-31.3 Steering ModesThe FAP-2000 receives position, heading and speed data, compares them with the track section to be steered, and applies that information to calculate and command the necessary rudder angle.1.3.1 Hand steering modesThe following hand steering modes are available without the autopilot:• Steering wheel • Wing steering control • Override tillerWhile in a hand steering mode, the ECDIS indicates the rudder angle and the hand steering mode.1.3.2 Autopilot steering modesThe autopilot steering modes are selected from the autopilot control panel.Heading Control modeThe Heading Control steering mode can be used always because it does not require position data.• Mode selection: HEADING CONTROL• The HEADING CONTROL and HEADING lamps are lit. • Immediate course change when the tiller is used to set the heading. • Course change is defined as heading controlled by the set rudder angle limit. Radius Control modeThe Radius Control steering mode can be used always because it does not require position data.• Mode selection: RADIUS CONTROL• RADIUS CONTROL and HEADING lamps are lit. • Course change is radius controlled with the set radius.• If wind, current, etc. affect the ship, the ship will drift (inside or outside) from the planned turn. This is displayedon the radar screen.Program Heading Change modeThe Program Heading Change steering mode can be used always because it does not require position data.• Mode selection: PROGRAM HEADING CHANGE• PROGRAM HEADING CHANGE and HEADING lamps are lit.• The tiller is first used to set a new heading and radius, which are also displayed on the radar screen.• "START HEADING CHANGE" flashes if the newly set heading is different from the currently used heading. • Start course change by pushing the START HEADING CHANGE button. • After activation, control is returned to RADIUS CONTROL.• If wind, current, etc. affect the ship, the ship will drift away (inside or outside) from planned turn. This isdisplayed on the radar screen.1. FURUNO Autopilot FAP-20001-4Program Track modeThe Program Track steering mode requires the Kalman filter and a high-precision sensor such as DGPS:• Mode selection: PROGRAM TRACK• PROGRAM TRACK, TRACK and TURN lamps are lit.• The tiller is first used to set a new heading and radius, which are also displayed on the radar screen. • "START HEADING CHANGE" flashes if newly set heading is different from currently used set heading. • Start course change by pushing the START HEADING CHANGE button. • After activation, the mode becomes PROGRAM TRACK. • Course change is track controlled with the set radius.• If wind, current, etc. affect the ship, the system tries to prevent the ship from drifting away (inside or outside)from the planned designed turn. This is displayed on the radar screen. Alerts in the Program Track steering modeThe following alerts may appear in the Program Track steering mode.Alert "488 Track Control Stopped ": Internal failure - program track mode is cancelled.Alert "493 PrgTrack : Needs Filter ON ": The Kalman filter is not used with the program track mode. This alert is repeated every four minutes for the next 10 minutes. If the condition continues, the alert "496 ProgTrack : Stop - Sensor Fail " is generated and the steering mode is automatically changed to "Radius Control".Alert "494 PrgTrack : Needs Log sens.": The Kalman filter is used with the program track mode but withoutincluding an independent speed source (separate log sensor or two position sensors). This alert is repeated every four minutes for the next 10 minutes. If the condition continues, the alert "496 ProgTrack : Stop - Sensor Fail " is generated and the steering mode is automatically changed to "Radius Control".Alert "495 PrgTrack : Needs diff Pos.": The Kalman filter is used with the program track mode but without a high-precision sensor (for example, DGPS). This alert is repeated every four minutes for the next 10 minutes. If the condition continues, the alert "496 ProgTrack : Stop - Sensor Fail " is generated and the steering mode is automatically changed to "Radius Control".Alert "496 PrgTrack : Stop - Sensor Fail ": No gyro data or if conditions of alert 493, 494, 495 or 503 have been valid for the last 10 minutes.Alert "498 Use manual rudder control ": Generated every two minutes to alert the operator to control the rudder manually, when the FAP-2000 has lost the gyro data and thus cannot control the rudder.Alert "503 PrgTrack : Need higher Spd ": The Kalman filter is used with the program track mode but the speed is below the limit set for the track steering in the installation parameters. The alert is repeated every four minutes for the next 10 minutes. If the condition continues, the alert "496 ProgTrack : Stop - Sensor Fail " is generated and the steering mode is automatically changed to "Radius Control".Alert "504 PrgTrack : Use Radius ctrl.": Informs the operator to change the steering mode to "Radius Control". This alert is generated if there are not sufficient conditions to continue the program track (i.e. alert 493, 494, 495 or 503 has been valid two minutes). This alert is repeated every four minutes.Alert "509 PrgTrack : Need SOG/COG ref ": Appears when there is no Speed Over Ground (SOG) and Course Over Ground (COG) available from the position sensor(s) or bottom track from a dual-axis log. This alert isrepeated every four minutes for the next 10 minutes. If the condition continues, the alert "496 ProgTrack : Stop - Sensor Fail " is generated and the steering mode is automatically changed to "Radius Control".1. FURUNO Autopilot FAP-20001-5Summary of autopilot steering modesHEADING CONTROLRADIUS CONTROLPROGRAM HEADING CHANGEPROGRAM TRACKSet heading Set radius Radius control Design before execution Full curved EBL on radar screen Wind, current, etc. compensation Yes No No No No No Yes Yes Yes No Yes No Yes Yes Yes Yes Yes No Yes Yes Yes Yes Yes Yes Needs gyro Needs logNeeds high-precision position Needs direct SOG/COG sensorYes No No NoYes YesNo NoYes Yes No NoYes Yes Yes Yes1.3.3 Route steering modesIn route steering, you can use either the Goto WPT mode or the Goto Track mode. Route steering is available with a predefined monitored route and when your ship is located inside a channel of a monitored route.See the figure below for the differences between Goto WPT and Goto Track. As shown, the ship will always make way toward the waypoint in Goto WPT, and return to set course in Goto Track.WPTWPTWPTWPTWPT"Goto WPT"WPT“Goto Track"Note : If the off track error is more than 100 meters in the Goto Track mode, the system cannot increase the approach angle towards the center line of the route.1. FURUNO Autopilot FAP-20001-6Goto WPT mode • Mode selection: Goto WPT• Goto WPT and ROUTE lamps are lit.• The tiller can be used to set radius, but not course, which is set automatically. • Steering is course controlled with set radius.• If wind, current, etc. affect the ship between waypoints, the system tries to prevent the ship from drifting fromthe planned route. The system has three means to prevent drifting from the planned route, and they are most effective when used together. If cross-track error is used alone, your ship stabilizes typically in a constant off-track position. The means are:• Measured cross-track error from the centerline, which is always active. • Drift compensation available from route parameters • Gyro error compensation available from route parameters• If wind, current, etc. affect the ship during turns, the ship will drift (inside or outside) from the planned turn,which is displayed on the radar screen. This kind of turn is called an "assisted turn".• Can be used when the ship has an accurate position source available.• Normally, the Goto WPT mode uses the dynamic location of a waypoint. However, if alert 413 is active, a non-dynamic waypoint is used. The figure below shows how the location of a dynamic WPT is defined in the Goto WPT mode.used by "Goto Track"Goto Track mode • Mode selection Goto TRACK• Available when the ship has a high-precision position source available. • The GOTO TRACK button and ROUTE and TRACK lamps are lit.• The tiller can be used to set radius, but not heading, which is set automatically. • Steering is track-controlled with set radius.• If wind, current, etc. affect the ship between waypoints, the system tries to prevent the ship from drifting fromthe planned route. The system has three means to prevent drifting from the planned route, and they are most effective when used together. If cross-track error is used alone, your ship stabilizes typically in a constant off-track position. The means are:• Measured cross-track error from the centerline, which is always active. • Drift compensation is available from the route parameters. • Gyro error compensation is available from the route parameters. • The Goto Track mode uses non-dynamic waypoint.。
ArduPilot Mega 说明书
ArduPilot Mega 说明书这里是 ArduPlane wiki,内容包括所有的组装和使用说明。
请使用侧边栏的功能导览。
注意: 如果要找 ArduCopter 的操作说明,请到这里。
? ? ? ? ? ? ? 介绍项目历史项目新闻购买说明书快速入门指南 o APM 2 快速入门指南 o APM 1 快速入门指南设置 o APM2 ? ? ? ? APM 2 板下载及安装 Mission Planner 和飞行软件连接遥控设备首次设置 ? ? o APM 1 ? ? ? ? 组装下载与安装 Mission Planner 及其他飞行软件连接遥控设备首次设置 ? ? 检查传感器逆转舵机和设置普通/升降副翼模式 ? ? ? 飞行 o o APM 开机和校准调整 ArduPlane ? ? ? ? 常用飞机的配置文件 MAVLink 参数说明进阶设定使用地面控制站 ? Mission Planner 使用任务规划器使用硬件开关检查传感器逆转舵机和设置普通/升降副翼模式?HappyKillmore 地面站 QGroundControl ? ? 航点 Widget 参数 Widgeto使用任务规划工具规划和分析任务 ? ? ? ? ? ? ? ? ? 规划航点和任务使用地面站录制和播放任务下载和分析飞行数据配置 PID 使用串口终端与 PC 飞行仿真器交互Python scripting 其他特性增稳模式线控模式自动驾驶模式返航模式(RTL) 盘旋模式o飞行模式 ? ? ? ? ?ooooo ? 模拟 o oo ?使用数据记录器自动起飞和降落启用倒飞设置地理围栏线性飞行的最低高度限制使用 X-Plane 进行半硬件仿真使用 FlightGear 仿真器使用软件再环仿真器可选附件 o 使用无线遥测数据和飞行实时命令 ? APM 1 ? ? ? APM 2 ? ? o ooooooooooo 空速计电压和电流传感器自动襟翼磁力仪简单的相机控制使用游戏游戏杆替代遥控自动相机追踪多副翼通道其他模拟传感器其他 I2C 传感器 3DR Radio Xbee 3DR Radio XbeeOn-screen display (光流传感器)用命令解析器进行高级设置和测试 ? ? 设置飞行模式测试模式 ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 遥控输入 GPS 输入 IMU 输出陀螺和加速度传感器输入电池输入(可选) 继电器输出航路显示空速计输出(可选) 绝对气压(高度)传感器输出磁力计输出(可选) Xbee 测试(可选) 导出 EEPROM GPS 原始输入日志指南空速计指南 Xbee 指南电压传感器指南高级设置? ?疑难解答 o 疑难解答附录 o oooo 正确的 LED 行为设置 RC 发射器的 6 种模式失效保护功能命令提示符 (CLI) 设置和测试使用 Arduino 编程 ? ? ? o ooooo 设置编程环境使用 Arduino 为 APM 编程下载和使用 APM 软件 ? 设置选项使用 AVR Studio 刻录程序理解状态/诊断串口输出理解偏航距 APM MAV 命令使用调试终端地面站重刷/更新 GPS 固件 ? ? ? uBlox GPS MediaTek GPS 其他 GPS 模块 APM 2 APM 1 ? ? 使用 AVRStudio 为编码器重建/编程使用 Bus Pirate 为编码器编程o更新 PPM encoder 轫体 ? ?ooAPM 硬件技术细节 ArduPilot Mega 主板ArduPilot Mega IMU 传感器板 APM 代码贡献者指南 ? 使用 Git ? ? ? ? ? ? ? ? 逐步引导使用 Git 贡献代码使用 Git 命令行使用 Git 扩展工具使用 TortoiseGit代码规范使用 Eclipse 编译 ArduPilot Mega 使用 make 编译 ArduPilot Mega 使用JTAG 调试 ArduPilot Megao ? ? 词汇表教学图片来源The DIY Drones Dev Team介绍欢迎使用 ArduPlane 操作说明,此说明会告诉你如何将一般的遥控飞机变为自动驾驶的无人机。
ArduPilot官方手册-Part2

If any methods in AC_PosControl are called then the flight mode code must also call the AC_PosControl::update_z_controller() method. This will run the z-axis position control PID loops and send low-level throttle level to the AP_Motors library. If any xy-axis methods are called then AC_PosControl::update_xy_controller() must be called. The AP_Motors library holds the “motor mixing” code. This code is responsible for converting the roll, pitch, yaw and throttle values received from the AC_AttitudeControl and AC_PosControl libraries into absolute motor outputs (i.e. PWM values). So the higher level libs would make use of these functions: set_roll(), set_pitch(), set_yaw() : accepts roll, pitch and yaw values in the range of -4500 ~ 4500. These are not desired angles or even rates but rather just a value. For example set_roll(-4500) would mean roll left as fast as possible. set_throttle() : accepts an absolute throttle value in the range of 0 ~ 1000. 0 = motors off, 1000 = full throttle.
野马飞行员手册
野马飞行员手册(中文翻译版)翻译:SINOFSX CPA9669目录制作人员名单 (2)介绍 (3)重要信息 (4)使用这本飞行员手册 (5)电脑性能 (6)重新安装你的软件 (7)飞机数据......................................................................................................8-9 代号和缩写.. (10)选择你的飞机 (11)2D面板......................................................................................................12-13 虚拟座舱...................................................................................................17-18 辅助控制面板.. (19)飞机外部图 (20)主飞行显示器.............................................................................................21-24 多功能显示器.............................................................................................25-34 音频面板.. (35)右侧开关面板.............................................................................................36-37 起落架和灯光面板.......................................................................................38-39 左侧开关面板.............................................................................................40-42 油门基座...................................................................................................43-45 自动驾驶仪................................................................................................46-47 备用仪表...................................................................................................48-49 增压.. (49)防冰 (50)主警告系统................................................................................................51-53 防火系统.. (54)限制和记忆项目………………………………………………………………………………55-60 正常程序………………………………………………………………………………………61-70 性能图表………………………………………………………………………………………71-90制作人员名单野马开发团队成员:野马测试团队成员:Jerry Beckwith Mike Badger Kurt Kalbfleisch Terry Gaff Paul Bartelt Giorgio La Pira Karl Gaff Cody Bergland Dave MarksJim Rhoads Elliot Block Roberto Serpieri Matt Kaprocki Dave Blevins William Mayr Todd Nicholson Zane GardHenning van Rensburg介绍赛斯纳奖状野马是超轻型喷气式商务机。
ArduPilot自动驾驶仪中文手册(待完稿)

、3
图意示装安 、2 。换切式模行进关开段三用利�道通八第为道通制控仪驶驾动自�中其
。号口串 下记并�动驱 LR232TF 装安示提据根时同�CP 与 oniudra 接连 BSU 过通、1 程编行进 oniudra 过通何如�二� erawtfoS/niaM/ne/cc.oniudra//:ptth 址地载下�oniudra 件软置配、2 。连相的 CP 与 tolipudra 于用�线据数 BSU INIM、1 具工需所�一� 程编 、三
介简
、一
册手仪驶驾动自 toliPudrA
件插接连的间之子板块两好装安应对
、2
图接连统系 、1 接连何如 �二�
。器感传接外等盘罗子电如诸接 连于用口接芯 6 的 UMI�口接的上子板 UMI 色蓝非而�上子板 AGEM 色红在接连块模 SPG�意注�子样的后之块模 SPG 接连
、4
插相子板块两
�示显据数点 航的下如到看可即�常正如� ”stniopyaw“入输中框令命在�stniopyaw、7 。次一作动秒 5 每换切� ”声咔咔“的 出发时换切器电继的载板到听会将你� ”yaler“入输中框令命在�yaler、6 。阻电率功中的 K9.3 个 4 上焊位空阻电 的下器电继板主在要需�压电测检要需果如�入接池电锂 S4 和 S3 持支统系
�示显的下如到看可即�常正如� ”spg“入输中 框令命在�定锁并星卫到搜能其使�置位旷空于块模 SPG 置放 入输 SPG、2
�示显的下如到看可即�常正如� ”oidar“ 入输中框 令命 在� 器控 遥开打 。电 加� 连相 统系和机收接使 入 输 CR 、 1 。障故现出件硬些某明说则�常异现出果如 �据数的应相到看以可 �单菜试测的面上入进 �话的常正全完件软和件硬果如 据数的储存所 MORPEE 载板示显——”pmudee“ 、21 据数出输入输的间之台电传数示显——”eebx“ 、11 、01 �盘罗子电接外要需�据数地出输盘罗子电示显——”ssapmoc“ 据数的出输计压气载板示显——”erusserpria“ 、9 �计速空接外要需�据数的出输计速空的接连所示显——”deepsria“ 、8 点航的定设示显——”stniopyaw“ 、7 常正否是作工器电继载板试测——”yaler“ 、6 统系入接需线电充的池电是提前但�压电前当示显——”yrettab“ 、5 据数的出输计度速加和仪螺陀载板示显——”oryg“ 、4 据数的轴三 Z/Y/X 的出输所件元导制性惯示显——”UMI“ 、3 0 示显则�星卫定锁未如�据数的到收接块模 SPG 从示显——”spg“ 、2 数参入输的道通个每机收接前当示显——”oidar“ 、1
操作手册_PilotPioneerV9.6

Pilot Pioneer 操作手册文档历史文档历史目录1.产品介绍 (1)1.1 操作系统 (1)1.2 最低配置 (1)1.3 建议配置 (1)2.缩略语 (2)3.软件安装 (3)3.1 安装驱动程序及运行环境 (3)3.2 安装测试软件 (4)4.测试流程 (5)4.1 新建工程 (5)4.2 设备配置 (5)4.2.1 未配置设备 (5)4.2.2 自动检测 (6)4.2.3 手动配置 (7)4.2.3.1 Handset设备配置 (9)4.2.3.2 GPS设备配置 (10)4.2.3.3 Scanner设备配置 (10)4.2.4 ADB连接方式 (10)4.3 测试模版与测试计划 (12)4.3.1 测试模版 (13)4.3.2 测试计划 (14)4.3.2.1 测试计划管理 (14)4.3.2.2 测试计划导入 (17)4.3.2.3 测试计划导出 (18)4.3.2.4 测试计划删除 (18)4.3.2.5 测试计划保存至模版 (19)4.4 数据采集 (19)4.4.1 连接设备启动测试 (19)4.4.1.1 连接模式 (19)4.4.1.2 记录模式 (20)4.4.2 测试控制 (23)4.4.3 结束测试 (25)4.5 窗口组合 (25)4.5.2 两类组合操作 (29)4.5.3 组合窗口调整 (31)4.6 场景 (34)4.7 保存工程 (35)5.测试业务 (36)5.1 Handset测试业务 (36)5.1.1 Call (36)5.1.2 MOS (37)5.1.2.1 关于POLQA的说明 (40)5.1.3 FTP Download (43)5.1.4 FTP Upload (45)5.1.5 HTTP Download (48)5.1.6 HTTP Page (50)5.1.7 HTTP Upload (52)5.1.8 Video Streaming (54)5.1.9 WAP Page (56)5.1.10 WAP Download (58)5.1.11 SMS (60)5.1.12 MMS (62)5.1.13 Attach (64)5.1.14 PDP (65)5.1.15 Ping (66)5.1.16 Receive Email (67)5.1.17 Send Email (69)5.1.18 PPP Dial (71)5.1.19 MTC Test (73)5.1.20 Idle Test (73)5.1.21 MOS Self-Check (74)5.1.22 MOS Self-Loop (76)5.1.23 Video Telephony (76)5.1.24 iPerf (78)5.1.25 Multi FTP Download (80)5.1.26 Multi FTP Upload (83)5.1.27 LTE Power (86)5.1.29 Video Play (88)5.1.30 DNS Lookup (90)5.1.31 Facebook (92)5.1.32 VoIP (94)5.1.33 WeiBo (96)5.1.34 Trace Route (97)5.1.35 PBM (99)5.1.36 WeCall (101)5.1.37 WeChat (103)5.1.38 APP YiXin (105)5.2 Scanner测试业务 (106)5.2.1 Pilot (106)5.2.2 CW (108)5.2.3 Spectrum (110)5.2.4 ColorCode (111)5.2.5 Blind (114)5.2.6 EPS (115)5.3 ATU测试 (117)6.数据管理 (122)6.1 测试数据管理 (122)6.1.1 测试数据导入 (122)6.1.1.1 常规导入 (122)6.1.1.2 高级导入 (122)6.1.1.3 按文件夹导入 (123)6.1.2 测试数据删除 (123)6.1.3 测试数据导出 (124)6.1.4 测试数据合并及分割 (129)6.1.4.1 测试数据合并 (130)6.1.4.2 测试数据分割 (130)6.1.4.3 测试数据轨迹校正 (131)6.2 基站数据管理 (132)6.2.1 基站数据库结构 (132)6.2.2 基站数据库导入 (135)6.2.2.1 自动导入 (135)6.2.2.2 手动导入 (136)6.2.3 基站数据库导出 (137)6.2.4 基站数据库删除 (137)6.2.5 基站数据库管理 (137)6.2.5.1 小区编辑 (138)6.2.5.2 增加基站 (139)6.3 地图数据管理 (140)6.3.1 [Map]窗口数据显示 (140)6.3.1.1 测试数据显示 (140)6.3.1.2 基站数据显示 (141)6.3.1.3 地图数据显示 (142)6.3.1.4 事件显示 (143)6.3.2 层控制 (144)6.3.3 小区设置 (146)6.3.3.1 小区显示 (146)6.3.3.2 标签显示 (148)6.3.3.3 小区连线 (150)6.3.3.4 小区分析 (152)6.3.4 信息设置 (154)6.3.4.1 参数信息 (154)6.3.4.2 小区信息 (156)6.3.5 拉线图分析 (158)6.4 数据回放 (161)6.4.1 复制测试数据 (163)6.4.2 数据关联 (164)7.统计报表 (165)7.1 KPI统计 (165)7.2 CQT 数据业务报表 (168)7.3 W-G切换和重选报表 (170)7.4 自定义报表模板 (171)7.5 自定义报表 (172)7.6 室内测试报表 (173)8.分析功能 (176)8.1 参数距离联合分析 (176)8.2 参数四象限分析 (179)8.3 CSFB异常分析 (181)8.4 覆盖率分析 (184)8.5 MOD3分析 (189)8.6 重叠覆盖分析 (193)8.7 小区测量分析 (197)8.8 小区统计分析 (203)8.9 导频污染分析 (208)9.过滤器 (215)9.1 过滤器定义 (215)9.1.1 过滤器列表 (217)9.1.2 过滤器内容 (217)9.1.2.1 条件编辑区域 (217)9.1.2.2 过滤器完整表达式区域 (219)9.1.2.3 备注区域 (219)9.2 过滤器条件说明 (219)9.2.1 参数型 (219)9.2.2 时间型 (221)9.2.3 区域型 (223)9.2.4 状态型 (224)9.2.5 条件范围型 (229)9.2.6 条件间逻辑符 (230)9.3 过滤器使用 (231)10.典型设备操作说明............................................................................ 错误!未定义书签。
AUTOPILOT NAVpilot-500 操作指南说明书

AUTOPILOT NAVpilot-500Operator’s GuideThe purpose of this Operator's Guide is to provide basic operating procedures for this equipment. For more detailed information see the Operator's Manual.Operating controlsCourse control knobSelects menu items and options.[STBD] (Starboard) key Steers the boat to starboard.STBY keySelects the STBY (manual) mode.AUTO keySelects the AUTO mode.Adjusting Brilliance/Contrast 1. Press the [POWER/BRILL] key to showthe adjusting window.2. Press the [PORT] or [STBD] key foradjusting BRILLIANCE.Rotate the [ENTER] knob for adjustingCONTRAST.3. Press any key except [POWER/BRILL],[PORT] or [STBY] keys to close thewindow.Steering in STBY mode1. Press the [STBY] key to go into the STBYmode.2. Steer the boat with the helm wheel.Steering in AUTO mode1. Set the boat on the desired course inSTBY mode.2. Press the [AUTO] key to go into theAUTO mode.3. Rotate the [ENTER] knob for fine courseadjustment.The NAVpilot-500 will maintain the boat’sheading automatically at the course set. Inthis mode, the boat may drift due to windand current. Steering in ADVANCED AUTO mode1. Connect the NAVpilot-500 to a navaidwhich output position data.2. Select “ADVANCED AUTO: ON” from theAUTO mode menu.3. Operate the NAVpilot-500 as similarly withthe AUTO mode.ADVANCED AUTO mode maintains setcourse without deviating from the track. Set the boat in NAV mode1. Select a destination waypoint on thenavigator connected.3. Set the boat on the desired course inSTBY mode.3. Press the [NAV] key to go into the NAVmode.This mode is used in connection with a navigational aid, such as GPS navigator. In this mode, current and weather will have little affect on the boat’s track line.When the ship goes out from the course on the NAV mode, the boat runs to the waypoint by COURSE or XTE mode.Select the NAV MODE “COURSE” or “XTE” from the NAV mode.Using the TURN modeThe [TURN] key provides the various turning motions depending on the used mode. The arrows show the direction to turn.AUTO modeSTBY, NAV modeRotate the [ENTER] knob to select turn modedesired, and then press the [ENTER] knob.180°/360° (AUTO mode only)This function changes the current set course180º or 360º.180 turn360 turnPress the [PORT] or [STBD] keyappropriately.ORBITThe boat will orbit around the boat’s currentposition.SPIRALThe boat will spiral in the direction of heading(in STBY mode), set course (in AUTO mode)or the shortest course to the next waypoint (inNAV mode).FIGURE EIGHTAfter the boat has traveled the distance "d"set on the menu, it starts turning in a figureeight pattern, automatically returning to theposition where the figure eight mode wasinitiated.FIGURE EIGHT mode ORBIT modeSPIRAL modeDodgingTo dodge other boats or obstacles, do thefollowing depending on the current mode.In STBY modePress the [PORT] or [STBD] key to steer therudder appropriately until the obstacle hasbeen dodged.In AUTO or NAV modePress the [PORT] or [STBD] key to changethe course appropriately until the obstaclehas been dodged.REMOTE mode1. Turn on the remote controller switch toshow “FU” or “NFU” on the control unit.For dodge type, there is no power switch.Dial typeButton typeLever typePUB. No. OSE-72500-D (2003/12, HIMA)2. Steer the boat by using the remotecontroller.Dial typeButton and lever type3.Turn off the remote controller switch.Dial typeButton and lever type。
飞行器电子速控器说明书

02Specifications03User Guide0405Normal Start-up Process and ProtectionsTrouble shootingModel Con. Current15APeak Current (10s)20ABEC NoLiPo 2-4SProgrammable item(Not Accessible in “One Shot” Mode)Timing (Medium/High)Weight 10.5gXRotor 15AMotor Wiring1Throttle Range Calibration2ESC Programming3Connect the receiver to the battery, ensure the transmitter and receiver are well bound, and then turn on the ESC.Throttle Calibration completedFor 250 or 300 class multi-rotors, we recommend using 1806 size or 2204 size motors and 5 inch or 6 inch propellers. (Because bigger propellers or motors may cause the ESCs to get burnt because of overload, so users need to take the risk themselves if they persist in using propellers or motors beyond our recommendation.).Users cannot change the signal-receiving mode during the powering up process and the flight. If necessary, they need to change the mode on the flight controller (on the condition that the flightcontroller has the “One Shot” signal-receiving mode), after that, disconnect the battery and then re-connect the pack, then the ESC will complete the mode change (the ESC will automatically re-detect the type of the input throttle signals and then execute the corresponding signal-receiving mode).“Beep-beep-”Throttle Calibration ; “Beep-beep-beep-” Intermediate Timing; “Beep-beep-beep-beep-” High Timing; If the throttle stick is moved to the bottom position 3 seconds after you hear thecorresponding beeps, then the programming of that item is complete.Programming is completed; and the ESC is ready to go.Start-up Protection: The ESC will shut down the motor if it fails to start the motor normally within 2 seconds by increasing the throttle value. In this case, you need to move the transmitter throttle stick back to the bottom position and restart the motor. (Possible causes of this problem: poor connection/ disconnection between the ESC and motor wires, propellers are blocked, etc.)Over-load Protection: The ESC will cut off the power/output when the load suddenly increases to a very high value. Normal operation will not resume until the throttle stick is moved back to the neutral position. The ESC will automatically attempt to restart when the motor and the ESC are out of sync.Throttle Signal Loss Protection: When the ESC detects loss of signal for over 0.25 second, it will cut off the output immediately to avoid an even greater loss which may be caused by the continuous high-speed rotation of propellers or rotor blades. The ESC will resume the corresponding output after normal signals are received.Throttle Calibration & ESC Programming• After it’s connected to the flight system, the ESC will automatically detect the input throttle signals every time it’s powered on and then execute the corresponding signal-receiving mode. • Users can calibrate the throttle range and change the timing advance in “Regular” signal-receiving mode but cannot do either in “One Shot” signal-receiving mode. • In “Regular” signal-receiving mode, users need to calibrate the throttle range when they start to use a new XRotor brushless ESC or another transmitter.• Users can change the timing advance when some abnormality occurs in ESC driving the disc-type motor or need the motor to reach a higher RPM. (Note: Medium/Intermediate Timing is the default setting.)Turn on the transmitter and move the throttle stick to the bottom position.The motor will emit a long “beep —“1 second after the system is connected to the battery indicating the ESC is armed and the multi-rotor is ready to go.USER MANUALMulti-RotorXRotor 15ABrushless Electronic Speed ControllerElectronic Speed Controller• Special core program for multi-rotor controllers meets various functional requirements against multi-rotors.• Specially optimized software for excellent compatibility with disc-type motors.• DEO (Driving Efficiency Optimization) technology significantly reduces the ESC temperature,improves the throttle response, and strengthens the stability and flexibility of multi-rotors. This ESC is quite suitable for QAVs. (The motors slow down rapidly, especially when reducing the throttle amount.) • In “Regular” signal-receiving mode, the ESC is compatible with various flight-controllers and supports a signal frequency of up to 500Hz.Features0120161227caused by unauthorized modifications to our product.We, HOBBYWING, are only responsible for our product cost and nothing else as result of using our product.。
U3飞控说明书2.0版

U3飞控使用说明(2.0版本)2014年8月U3飞控为U2S飞控的升级版本,软硬件均有很大改进。
目前版本主要增加以下内容:1、增加PPM模式串行3线连接接收机功能2、增加围栏模式(超过设定距离,就自动返航)3、增加飞行记录显示(飞行结束,显示飞行最高、最快、最远,飞行次数等飞行记录)4、增加起飞模式(设定起飞仰角,可实现飞机弹射起飞后,启动动力的功能)5、回家位置手自动可选。
(自动:每次启动自动保存当前位置为回家位置;手动保存:人工设置回家位置,除非人为改变)6、改善OSD界面,设置全部中文化,简单易懂。
7、返航模式和航点模式,改进自动油门(按照飞行高度差,自动调整飞机动力)8、增加方向舵控制,飞机模式可选正常、飞翼、V尾三种类型。
9、航点模式为7航点,实现两种设置方式,可以采用距离方位角设置,也可以GPS坐标精确调整,实现精确的航点设置,设置数据同步更新。
10、增加空速管接口,实现空速检测,定速航行等功能11、增加数传接口,用于连接地面站U3飞控OSD显示界面数据定义:飞行结束后,显示飞行数据记录:OSD数据解释:飞机所在位置方位角:指飞机相对于起飞地点,现在所处的位置,如:,指飞机现处于相对于飞起地点正南方向(正北为0度,正东为90度,正南为180度,正西为270度,以此类推)。
回家角度:指引玩家回家的指示。
按照交投和角度指示飞行,是飞行角度尽量接近0度,就会引导飞机返航。
如上图,指飞机向又转19度,为回家的方向。
这个角度直接指引回家方向!FPV中尤其要关注。
回家距离:指飞机距离回家位置的地面直线距离,单位是米。
高度:相对于“家”的位置的相对高度差。
单位是米。
航程:飞机累计飞行距离。
油门大小:飞控油门大小,数值0-100,代表脉宽1000US-2000US。
此数值与设置里的最低油门相对应,便于飞行时候判断油门大小,此数值代表油门脉宽,一般遥控器最低油门在10左右,最高油门在90左右。
接收机信号强度:这个是测量接收机信号的电压值,单位为0.1V,测量电压范围为0-3.3V。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ArduPilot 自动驾驶仪手册一、简介系统构成:1、一块ArduPilot Mega板(红色)2、一块ArduPilot Mega IMU板(红色)3、一套 MediaTek GPS 或者 uBlox GPS模块4、若干根接收机连接线及配套的插线,如果需要使用系统的自动驾驶和功能,推荐使用8通道接收机5、一套Xbee数传电台,一块Xbee数传电台与ArduPilot Mega IMU,另一块通过适配器与PC相连(提醒:因传送的数据量大,推荐配置空中速率位57600bps的数传电台,低速率数传电台将会导致严重的数据丢包现象)。
仔细阅读本手册,将有利于调试自动驾驶仪。
作为一套开源的自动驾驶仪,我们支持第三方传感器的接入,如空速计、电子罗盘等,这意味着您必须对本系统进行正确的参数设置,才能安全飞行。
二、快速入门指南(一)电路板的组装所需材料及工具:MEGA 板和IMU板各一块;板件连接插件若干;带连线的GPS模块(推荐4HZ);烙铁;焊丝等1、焊接MEGA机IMU板上的元器件2、对应安装好两块板子之间的连接插件3、两块板子相插4、连接GPS模块之后的样子,注意:GPS模块连接在红色MEGA板子上,而非蓝色IMU板子上的接口,IMU的6芯接口用于连接诸如电子罗盘等外接传感器。
(二)如何连接1、系统连接图其中,自动驾驶仪控制通道为第八通道,利用三段开关进行模式切换。
2、安装示意图因IMU板载三轴传感器,系统安装时需充分考虑到减震,尽量使其在飞机上水平安装,且安装方向应如上图所示。
3、DIP开关的使用因为接收机和配置文件之间会存在差异,可能会导致舵机出现反向工作,这时你可以通过拨动DIP开关进行修正,而非通过复杂的参数修改进行修正。
三、编程(一)所需工具1、MINI USB数据线,用于ardupilot与PC的相连。
2、配置软件arduino,下载地址/en/Main/Software(二)如何通过arduino进行编程1、通过USB连接arduino与PC,同时根据提示安装FT232RL驱动,并记下串口号。
2、对系统进行编程及测试运行刚才下载的Arduino,在菜单TOOLS-SERIAL PORT下选择正确的COM口,同时在BOAD下选择ATMEGA1280。
3、下载如下地址测试用的系统软件,该文件可以让各舵机有规律的转动/datasheets/DevTools/Arduino/ArduPilotMega _dancing.zip,解压后打开其中的ArduPilotMega_dancing文件,最后点击软件中UPLOAD的图标进行写入,写入时候主板上的指示灯会闪烁(三)、正式写入APM系统软件1、到如下地址下载最新系统软件,文件名称为为ArduPilotMega+版本号,/p/ardupilot-mega/downloads/list2、下载后解压缩至本地硬盘,用Arduin打开文件夹下的ArduPilotMega目录,选取ArduPilotMega.pde文件,这是软件会自动加载所有的系统文件。
3、部分参数的修改(GPS)打开APM_Config选项,根据所使用的GPS模块型号进行对应修改,比如采用MTK的模块,那么配置文件就应该修改成GPS_P ROTOCOL_MTK,其他类型的GPS参数修改以此类推,把代码“#”前面的“//”删除,即表示启用本行代码,如下图所示:注意:如果GPS未接入系统或对应的模块类型错误,将无法正确加载GPS 信息。
4、参数修改好后,既可点击UPLOAD进行参数灌入,此时电路板上的RX/TX指示灯会闪烁,大约一分钟后数据写入完毕。
四、基本调试1、通过拨动SW2开关,可对系统进行在线调试,SW2开关拨动到如图所示位置后,需要对主板重新加电。
2、把USB连线插入电脑3、选择正确的COM口,点击图中的软件按钮4、确保串口速率为115200bps,并确认返回。
这时,您可以在软件中看到命令输入栏,任何时刻你可以输入“exit”退出调试模式。
你可以输入“help”命令,寻求帮助。
初始的命令有:(1)、“logs”-日志模式(2)、“setup”-设置模式(3)、“test”-测试模式5、安装设置在安装设置之前,需要把你的接收机对应插入AMP板,并打开电源,并把系统通过三段开关调整到直接飞行模式,同时连接数传电台(如果没有数传电台的话,也可以通过USB转TTL模块与电脑相连,为确保数据传输的稳定,推荐使用FT232RL模块的转接板)和GPS模块。
GPS模块需要放置在空旷的位置,使其能够搜索到卫星并锁定。
在命令框中输入“setup”并回车,进入设置模式。
“设置”模式下允许的命令:(1)、“reset”——重置系统默认的参数设置(2)、“radio”——接收机通道设置(3)、“modes”——接收机对应的通道设置(4)、“show”——显示当前内存的配置接收机设置,本设置的目的是让AMP板指导所接入接收机各通道的量程,以便于三轴平衡控制输出适当的舵量。
打开接收机、是AMP板处于直接控制模式,进入到“radio”命令框,这时,拨动副翼、油门、升降舵、方向舵及其他通道,上下左右分别达到满舵,多重复几次后复位。
这时系统会记录相对应的位置,如下图:模式设置(飞行控制模式设置),进入setup下的modes模式,这是你可以看到飞行模式下个控制开关的状态,如果你想改变状态,可以通过遥控器上的方向舵和副翼通道开关进行调整,摇杆向左或者向右推,模式将会相应改变,调整完毕后,输入“EXIT”后,系统将保存参数并推出。
如果在调整后发现部分舵机出现反向工作,这是可以通过遥控器进行调整或者通过主板上的DIP开关进行调整,建议通过遥控器进行修正。
日志模式,此模式下可以调取板载的16M内存中所保存的飞行日志,常用的命令有“erase”-删除日志。
五、测试模式在命令框中输入“test”,即可进入到测试模式,输入“help”可以看到测试模式下所有的选项。
可进行测试的项目有:1、“radio”——显示当前接收机每个通道的输入参数2、“gps”——显示从GPS模块接收到的数据,如未锁定卫星,则显示03、“IMU”——显示惯性制导元件所输出的X/Y/Z三轴的数据4、“gyro”——显示板载陀螺仪和加速度计输出的数据5、“battery”——显示当前电压,但前提是电池的充电线需接入系统6、“relay”——测试板载继电器工作是否正常7、“waypoints”——显示设定的航点8、“airspeed”——显示所连接的空速计输出的数据(需要外接空速计)9、“airpressure”——显示板载气压计输出的数据10、“compass”——显示电子罗盘输出地数据(需要外接电子罗盘)11、“xbee”——显示数传电台之间的输入输出数据12、“eedump”——显示板载EEPROM所存储的数据如果硬件和软件完全正常的话,进入上面的测试菜单,可以看到相应的数据,如果出现异常,则说明某些硬件出现故障。
1、RC输入使接收机和系统相连,加电。
打开遥控器,在命令框中输入“radio”,如正常,即可看到如下的显示:2、GPS输入放置GPS模块于空旷位置,使其能搜到卫星并锁定,在命令框中输入“gps”,如正常,即可看到如下的显示:3、IMU,在命令框中输入“IMU”,如正常,即可看到如下的三轴数据显示:4、gyro,在命令框中输入“gryo”,如正常,即可看到如下的陀螺仪和惯性加速元件的数据显示:5、battery,在命令框中输入“battery”,如正常,即可看到如下的电压数据显示:系统支持3S和4S锂电池接入,如果需要检测电压,需要在主板继电器下的电阻空位焊上4个3.9K的中功率电阻。
6、relay,在命令框中输入“relay”,你将会听到板载的继电器切换时发出的“咔咔声”,切换每5秒动作一次。
7、waypoints,在命令框中输入“waypoints”,如正常,即可看到如下的航点数据显示:共计可以输入256个航点,显示的数据中有,P2 10000代表100米,P3、P4代表经纬度。
8、airspeed,在命令框中输入“airspeed”,如硬件连接正常正常,即可看到空速计所输出的数据:9、airpressure,在命令框中输入“airpressure”,如硬件连接正常正常,即可看到气压高度计所输出的数据:9、compass,在命令框中输入“compass”,如硬件连接正常正常,即可看到电子罗盘所输出的数据:10、xbee,在命令框中输入“xbee”,如硬件连接正常正常,即可看到数传电台所输出输入的数据:这是你可以用电脑的串口查看工具,看到数据流,数传电台的默认空中速率为57600bps,你也可以修改为其他速率,比如38400bps,只需修改APM_Config.h 文件中的#定义SERIAL3_BAUD 38400既可。
11、eedump,在命令框中输入“eedump”,你可以看到当前板载存储器的使用情况:六、高级模式大多数使用者可以通过拨动DIP开关进入基本测试模式,但是通过修改APM_Config.h文件中的命令行可以实现更多的功能。
复制/p/ardupilot-mega/wiki/AdvancedConfig 页面中的代码粘贴到APM_Config.h可以实现更高级的功能。
未完待续Kan8/火星刺客 2011.2.14ArduPilot飞控交流群QQ:57343222。