华成多轴机械手控制系统说明书_V41
机械手控制说明书

电气控制与PLC课程设计说明书目录一、绪论 (3)二、机械手的工作原理 (4)2.1机械手的概述 (4)2.2机械手的工作原理 (5)三、机械手的工作流程图 (7)四、输入和输出点分配图及原理接线图 (8)五、元器件选型清单 (10)六、控制程序 (14)6.1初始化流程图设计 (14)6.2手动操作梯形图 (15)6.3回原点方式顺序功能图 (16)6.4自动方式顺序功能图 (17)6.5 PLC总程序梯形图 (18)七、总结 (23)参考文献 (24)一、绪论1.1 可编程序控制器的应用和发展概况可编程序控制器(programmable controller),现在一般简称为PLC (programmable logic controller),它是以微处理器为基础,综合了计算机技术、半导体集成技术、自动控制技术、数字技术、通信网络技发展起来的一种通用的工业自动控制装置。
以其显著的优点在冶金、化工、交通、电力等领域获得了广泛的应用,成为了现代工业控制三大支柱之一。
1.2 PLC的应用概况PLC的应用领域非常广,并在迅速扩大,对于而今的PLC几乎可以说凡是需要控制系统存在的地方就需要PLC,尤其近几年来PLC的性价比不断提高已被广泛应用在冶金、机械、石油、化工、轻功、电力等各行业。
按PLC的控制类型,其应用大致可分为以下几个方面。
(1)用于逻辑控制这是PLC最基本,也是最广泛的应用方面。
用PLC取代继电器控制和顺序控制器控制。
例如机床的电气控制、包装机械的控制、自动电梯控制等。
(2)用于模拟量控制PLC通过模拟量I/O模块,可实现模拟量和数字量之间转换,并对模拟量控制。
(3)用于机械加工中的数字控制现代PLC具有很强的数据处理功能,它可以与机械加工中的数字控制(NC)及计算机控制(CNC)紧密结合,实现数字控制。
(4)用于工业机器人控制(5)用于多层分布式控制系统高功能的PLC具有较强的通信联通能力,可实现PLC与PLC之间、PLC与远程I/O之间、PLC与上位机之间的通信。
机械手使用说明书
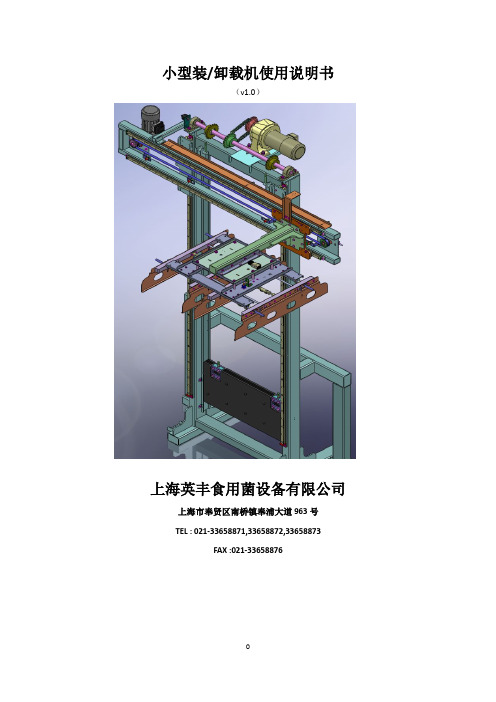
小型装/卸载机使用说明书(v1.0)上海英丰食用菌设备有限公司上海市奉贤区南桥镇奉浦大道963号TEL:021-********,33658872,33658873FAX:021-********小型装载机各部件说明上升下降电机左右移动电机上下移动横臂左右移动臂机械手爪子配重机械手加紧放松气缸左右移动位置的接近传感器目录1.运行开始前检查事项----------42.操作各部分名称及用途----------53.操作顺序----------74.停止顺序----------75.运行中按紧急停止按钮的情况及再开运行----------86.自动返回原点的动作条件及顺序----------87.自动判别层数的动作及条件----------88.手动操作的必要性及设定方法----------98-1低速上升及下降机械手臂8-2正常运行速度(高速)上升及下降机械手臂8-3左/右低速水平移动机械手臂8-4正常运行速度(高速)左/右低速水平移动机械手臂8-5打开夹紧爪8-6机械手臂回复原点8-7机械手臂的左右原点,停止点的调整法8-8机械手臂的最小水平移动高度的调整法9.各种安全装置的种类及动作效果----------139-1根据不同位置超下降9-2爪子夹紧/松开异常9-3装筐时-筐掉下9-4卸筐时-筐掉下9-5装筐时-筐下降不良9-6卸筐时-筐下降不良9-7变频器异常9-8上下左右超时9-9编码器异常9-10制动及上升/下降,水平旋转过于移动10.运行中异常种类及检查事项----------1710-1.手动/自动都不能运行时10-2.虽然箱子集中但是没有下降时10-3.虽然机械手臂下降但是没有夹紧时10-4.虽然夹紧但是没有上升时10-5.夹紧箱子上升后没有左右水平移动时10-6.左右移动后没有下降时10-7.下降到托盘目的地后没有打开夹紧爪时10-8.松开夹紧爪后没有上升时10-9.托盘上到达上升点后没有回复原点时10-10.离目的地过度脱离(冲突)10-11.码垛状态不是垂直时11.跟随主要部分故障时现象及检查方法----------1911-1输送机的传感器11-2接近传感器11-3机械手臂部的编码器11-4电机11-5制动器11-6夹紧部分气缸传感器12.编码器原点设定常用步骤----------2613.变频器异常显示及检查事项(请参照变频器使用说明书)14.附电气图纸1.运行开始前检查事项1)确认托盘供应系统上的托盘输送到位没有2)保证托盘供应系统周围及小型装载机周围无障碍物.3)确认托盘供应系统和小型装载机控制箱内的指示灯亮/灭状态4)小型装载机机械手臂上升及下降的接近传感器及感应板是否正常固定5)小型装载机机械手臂上的左右横向移动的各接近传感器是否正常固定6)筐子整列输送线上的各个感应器是否正常固定7)机械手爪子的夹紧气缸感应器是否正常固定8)上下及左右的电机运转正常(手动运转)9)检查压缩空气的压力是否充足(5Kg/㎠以上)10)箱子的边缘损坏时运行中存在掉下的可能性,请注意使用.2.操作各部名称及用途<控制板上部位置>①电源显示灯输入220AC时开关电源②ON时红色灯点灯各个操作部分可以使用状态.②电源开关运行时这个开关旋转顺时针方向ON后①号灯点灯.③报警各种异常时发出报警并不同的警报,警报音不一样.详细请参照13项(警报分析).并且1托盘操作结束后连续报警2秒.④紧急停止开关按这个按钮时所有功能立即停止,解除时必须旋转顺时针方向.⑤托盘确认按钮(必须等托盘移动到指定位置后按按钮)⑧托盘确认指示灯(托盘确认按钮按下后,点亮直至该托盘工作结束)⑥开始开关按黄色开关后进行以下动作.a.自动/手动开关在自动位置时1.各部分在原点时:显示灯点灯并进行自动运行2.各部分不在原点时:进行回复自动原点动作并灭灯回复原点后跟1项一样.3.头一次慢速下降至托盘之后正常速度运行.(自动确认码垛层次过程)*运行中按开始按钮时,按后头一次慢速下降.b.自动/手动开关在手动位置时不进行上下及水平旋转动作,只启动筐移动用的筐整列输送机,本体的故障原因不能使用时有用.⑦停止开关使用于运行中停止时,机械手臂抓筐启动时(上/下或左/右移动)一个过程结束后停止.<控制板内部DOOR面的位置>A、手动/自动开关:正常运行时往前推转换成自动状态手动操作时相反的方向后操作其它开关.B、上/下移动开关:手动上下移动的方向上下移动时低速运行.这时候控制板上部的停止开关按住情况下操作时,可以使用正常速度动作(减速位置减速,停止位置停止等)C、左/右移动开关:手动左/右移动时使用操作跟上下开关一样.**左右及上下时根据各位置存在安全限制详细请参考6及7项**D、夹紧开关:抓筐的爪子夹紧及松开试验时使用(自动运行时为夹紧)E、设定用开关:设定上下/左右移动等时使用-详细请参考6及7项3.操作顺序1.电源开关ON后确认显示灯是否点亮.2.电源显示灯以外的灯必须灭灯并且无警报音.3.按开始按钮.这时候短暂的警报音时打开控制板盖子后,确认手动操作状态及紧急停止按钮的状态4.机械手臂不在原点位置时先自动运行原点回复动作.(爪子在整列输送机一侧的上方)5.托盘放好停止位置后按托盘确认按钮.这时候第一次按下托盘确认后,点亮托盘确认灯,开始码垛直至该托盘结束,托盘确认灯灭灯,或者托盘到达指定位置后自动重复上述动作6,最后一层码垛结束,机械手回复开始点后,2秒的警报音,这时候替换托盘4.停止顺序1.机械手臂在筐整列上部时,按停止按钮立即停止.2.夹紧筐的状态下按停止按钮时操作结束后在中央上部停止.3.确认停止后为了安全按紧急停止按钮.5.运行中使用紧急停止的情况及再运行5-1启动紧急停止的情况1.操作中机械运行路径上有障碍需要紧急停止时2.预测安全事故时3.机械手臂下降后夹紧筐时,没有顺利夹紧警报时4.因机械手臂的异常现象时(发生超速,范围脱离等)5.操作人员离开工作场所时6.设备维修工作时.5-2紧急停止时的效果1按紧急停止按钮时运行中的一切电机立即停止(根据电机的速度冲击不一样,停止距离会有一定的变化)2夹紧动作动作结束的状态下紧急停止——没有变化(维持)3整个操作过程回复到结束状态再开机运行时从头开始.6.自动原点动作条件及顺序动作始点:停止状态下每按运行开始按钮时不在原点位置时自动回复原点动作(整个过程低速运行)动作过程:1夹紧爪松开时松开传感器点亮后2机械手臂不在上升限位时,上升到接近传感器靠近传感器感应板为止(低速上升)3机械手臂不在整列输送机上方时以整列输送机为基准低速移动7.自动层数判别动作及条件动作开始点:每第一次开始运行时动作动作过程:托盘码垛第一层筐时低速下降动作原理:托盘感应筐的位置后自动决定码垛位置8.手动操作必要性及设定方法8-1必要情况1检查及调整设备2检查自动情况时动作环境3运行中发生异常时措施4调整上下左右位置及原点时打开控制板盖子后“自动/手动”开关转换成手动后,使用以下操作.8-2设定方法A.机械手臂低速上升及下降在整列输送机一侧使用上升/下降用开关,推或拽时动作.B.机械手臂正常运行速度(高速)上升及下降控制板上部的停止按钮按住的情况下启动上升/下降开关上升时:启动到上升限制点为止下降时:1整列输送机位置——夹紧一列筐时输送机和筐底部间约50mm间隙时停止2托盘位置-推车和筐底部间约50mm间隙时停止.*注:上限传感器点亮时制动器立即启动只能手动下降.:下限传感器点亮时立即启动只能手动上升9-.机械手臂左/右低速移动1从左往右移动:左/右移动开关向右推,手臂到达另一侧停止点(接近传感器)后停止,.这时候需往左移动时,开关回复中央位置后再往左移动.2以上往左移动:以上同样(方向相反)**左&右移动停止点(两侧的停止点)时不能再进行.**9-.机械手臂正常运行速度(高速)左/右移动条件:机械手臂在左或右的终点位置时(即停止点,也同时是开始点)在终点之外位置时只能手动低速移动控制板上的停止按钮按住的情况下操作以上C步骤的动作.*机械手臂加速后高速移动于另一侧的减速点减速后低速平缓到达停止位置时正常*E.松开夹紧夹紧开关打开时打开关闭时夹紧F.机械手臂回复原点不明原因没有自动回复原点或脱离编码器时,对准机械手臂的上下及左右位置值.(这叫原点化)1.左右原点化操作顺序1).手动上下开关把机械手臂充分上升,避免左右移动时与整列输送机碰撞.2).使用手动左右移动开关,左或右移动全程时3.再操作开关往整列输送机方向移动至停止为止,移动停止时放松开关.*确认停止点是否在整列输送机的上方.万一离整列输送机位置脱离很多时根据以下G项”机械手臂的左右,原点的停止点调整法”调整.2.上下原点操作顺序1)以上1项(左右原点调整)进行后2)输送机上放4个或6个重的筐.3)手动解除夹紧(即打开爪子)4)手动下降确认筐探知用接近传感器点亮(点亮后不再进行下降)5)夹紧筐后上升约500mm的程度(上升时确认筐探知用接近传感器灭灯.)6)手动开关板上右侧最后的setup开关往上.7)确认PLC上的23号灯点亮后.8)整列输送机上,下降到停止为止并发出短暂警报音时证明原点设定结束.9)往上的setup开关回复原位置时启动准备结束。
HC1800机械手控制系统用户手册资料精
HC HC1818180000机械手机械手控制系统控制系统用户手册(V 2.0版本版本))目 录录安装注意事项安装注意事项................................................................................................................................................................1 第一章第一章 系统配置及安装系统配置及安装..............................................................................................................................................2 1.1 配置及说明. (2)1.2 控制系统的安装及调试...................................................2 第二章第二章 按键说明按键说明..........................................................................................................................................................3 2.1 操作面板按键位置图.....................................................3 2.2 手动状态下操作说明.....................................................4 2.3 自动状态下操作说明.....................................................5 2.4 功能操作说明.. (5)2.4.1 待机页面...........................................................5 2.4.2 中英文切换.........................................................5 2.4.3 功能选择...........................................................6 2.4.4 特殊功能...........................................................6 2.4.5 单双臂选择.........................................................7 2.4.6 模组选择...........................................................7 2.4.7 教导...............................................................8 2.4.8 时间...............................................................9 2.4.9 I/O 监视...........................................................9 2.5 标准动作程式..........................................................10 2.5.1 单臂动作程式......................................................10 2.5.2 双臂动作程式......................................................11 2.6 故障说明.. (14)安装注意事项安装注意事项1、 外部电源发生异常,控制系统会发生故障,为使整个系统安全工作,请务必在控制系统的外部设置安全电路。
机械手操作指导书
机械手作业指导书第1页共5页设备名称单轴伺服机械手设备规格XTB-1000ID1、目的:1.1为规范机械手调整与操作,方便生产,保护模具与设备及人员安全。
1.2此作业指导书是XTB-1000ID单轴伺服机械手的作业指导书,供作业者进行作业时参考用。
2、范围:此作业指导书适用于XTB-1000ID单轴伺服机械手的操作。
3、安全要点:3.1禁止进入到机械手的工作范围。
3.2禁止在运行中维修机械手。
维修时,请关闭空气开关,切断控制箱或操作器电源开关以及电源断路器后,再进行维修。
3.3操作时,必须站于机械手工作范围外。
调试、输入完成后,操作器必须置于注塑机操作面板后的挂钩上。
3.4在使用和操作前请仔细阅读、学习《机械手使用说明书》。
4、注意事项:4.1机械手使用的空气必须是干燥空气。
气源压力在0.4~0.6MPa,空气过滤减压阀表盘中指针调整在0.5MPa左右。
如下图所示:空气过滤减压阀空气过滤减压阀表盘4.2每日检查空气过滤减压阀的积水,并适时排除。
积水水位不得超过满水线。
4.3经常整理、整顿机械手的四周,按《机械手使用说明书》中2.7、2.8、2.9、2.10对机械手进行日常保养。
5、操作流程:机械手作业指导书第2页 共5页设备名称 单轴伺服机械手 设备规格 XTB-1000ID5.1开机前调整:5.1.1将机械手连接电缆接口调换至工作接口。
如下图所示:5.1.2确认机械手所有的电线、电缆都已连接正确,所有的外盖等无破损或不合适的地方。
5.2开机:5.2.1在注塑机开启的情况下,确认机械手控制箱的电源开关、操作器急停按钮处于打开状态。
如下图:5.2.2通过注塑机的操作面板将机械手调整为“使用”。
调整步骤:5.3检查并确认气压、电压:5.3.1检查气源气压、是否达到0.4MPa 以上。
查看前后单元的控制箱侧的电子气压显示表是否为正值。
如下图所示:机械手短接口:机械手停止使用时,将连接电缆接口接在短接口上机械手工作接口:机械手正常使用时,将连接电缆接口接在工作接口上控制箱的电源开关将“不用”调为“使用”机械手作业指导书第3页 共5页设备名称 单轴伺服机械手 设备规格 XTB-1000ID5.3.2查看操作器面板显示,检查机械手系统自检是否良好。
机械手说明书 (1)

2)本机械手的保养、维护、检修等工作,必须由受过专业培训的技术人员来承担;
3)无关人员进入机械手工作范围,应告知安全人员并了解应注意的安全要求;
4)没有征得制造商的同意,任何试图改变机械手原始设计的应用范围以及其它改装行为都是被禁止的;
二.安装与搬运
1.安装尺寸
2.包装尺寸
3.拆箱后搬运
注意!
搬运过程中禁止人员在机械手下方作业
注意!
假如机械手需要重新安装或者移动,请告知代理商或者制造商.
注意!
机械手在出厂前已确认完好状态,请在运输及拆箱过程中务必小心谨慎,
如果发现有因运输过失造成损伤,请立即告知运输公司,封存受损件以备检查,
并申请赔偿.
21
A00A090
耐磨垫
2
9
A00PSI12E
关节轴承
1
20
A00P81240
圆螺母
1
8
A00A080
定位柱
1
19
A00P85840
止退平垫
1
7
A00A070
旋出角度调整轴
1
18
A00P6008
滚珠轴承
2
6
A00A060
气缸旋转轴
1
17
A00PT81212
圆螺母
1
5
A00A050
拱旋转轴
1
16
A00PT85812
1
9
A00P15SL
手臂滑轨
1
18
A00PAS06
速度控制阀
2
8
A00C090
护管固定架
机械手说明书

机械手说明书目录前言--------------------------------------第一章设计任务书 ------------------------------------第二章设计任务分析以及总体方案-----------------------(一)机械手设计原则---------------------------(二)机械手分类-------------------------------------(三)机械手主要组成------------------------------(四)机械手结构布置要求及平稳性与定位精度-----------第三章机械部分的设计---------------------(一)机械手手部----------------------------------(二)机械手的手腕-------------------------------------(三)机械手的手臂----------------------------------第四章驱动部件设计----------------------------(一)液压驱动部分------------------------------------(二)气压驱动设计-------------------------------------(三)液动机的选择-------------------------------------(四)减速齿轮的选择------------------------第五章管路布置及效验---------------------------(一)机械手常用位置检测元件---------------------------(二)管路布置方法 --------------------------------第六章参考文献---------------------第七章设计感言-------------------------------------前言机械手是模仿人的手部动作,按给定程序、轨迹和要求实现自动抓取、搬运和操作的自动装置。
(整理)多自由度机械手设计说明书.
精品文档本科毕业设计(论文) 题目:多自由度机械手设计系别:机电信息系专业:机械设计制造及其自动化班级:学生:学号:指导教师:2013年4月本科毕业设计(论文) 题目:多自由度机械手设计系别:机电信息系专业:机械设计制造及其自动化班级:学生:学号:指导教师:2013年4月多自由度机械手设计摘要随着现代科学技术的发展,机器人技术越来越受到广泛关注,在工业生产日益现代化的今天,机器人的使用变得越来越普及。
因此,对于机器人技术的研究也变得越来越迫切,尤其是工业机器人方面。
本论文作者针对这一领域,设计了一款液压机械机械手,该机器人拥有五个自由度。
首先,作者针对该机器人的设计要求,对结构设计选择了一个最优方案,对关键零件设计并进行校核。
本课题是一个机械、液压紧密的实用性项目,文中对机械手机械结构的设计、液压系统的设计。
最后,总结了全文,指出了机械手的改进措施、应用前景和发展方向。
关键词:机械手;液压系统;五个自由度Many degrees of freedom manipulator designAbstractWith the development of modern science and technology, the robot technology has been paid more and more attention, in an increasingly modernized industrial production, the use of robots is becoming more and more popular. Therefore, the research of robot technology becomes more and more urgent, especially industrial robots. The author of this thesis in this field, design of a hydraulic mechanical manipulator, the robot has five degrees of freedom. First of all, the author according to the requirement of the design of this robot, an optimal scheme of the structure design of the selection, the design of key parts and checked.This topic is a mechanical, hydraulic close practical project, design of mechanical design, mechanical structure of the hydraulic system of the mobile phone in. Finally, summarized the full text, points out the improvement measures, manipulator application prospect and development direction.Keywords: manipulator; hydraulic system; five degrees of freedom目录1 绪论 (1)1.1 选题背景及其意义 (1)1.2 国内外研究现状与发展趋势 (1)1.2.1国内的研究现状 (1)1.2.2国外研究现状 (2)1.2.3发展趋势 (3)1.3 本设计主要研究的内容 (3)1.3.1机械设计结构部分 (3)1.3.2机械手驱动方式 (4)2 机械手的总体设计 ........................................................... 错误!未定义书签。
华成多轴机械手控制系统说明书_V4.1

3.3.1 自动运行数据的监视 .................................................................................................. 11
3.3.2 自动运行时参数的修改 .............................................................................................. 12
4.2 程序教导 ............................................................................................................................. 14
4.2.1 轴动作的教导 .............................................................................................................. 15
2.2 主画面及轴定义 ................................................................................................................... 3
2.2.1 主画面说明........................................................................................................ ...................................................................................................... 16
机械手自动控制系统

实训项目5:机械手控制系统5.1实训题目机械手控制系统5.2实训任务建立机械手控制系统。
1、启动按钮“开”,机械手下移5S——>夹紧2S——>上升5S——>右移10S——>下移5S——>放松2S——>上移5S——>左移10S,最后回到原始位置,自动循环。
2、启动按钮“关”,机械手停在当前位置。
3、复位按钮“开”,机械手在完成本次操作后,回到原始位置,然后停止。
4、复位按钮“关”,退出复位状态。
5.3实训步骤5.3.1新建一个工程1、在工程管理器中选择菜单“文件/新建工程”,或者点击工具栏的“新建”按钮,出现“新建工程向导之一” 对话框。
2、单击“下一步”,弹出“新建工程向导之二”对话框,选择所要新建的工程存储的路径。
一般是d:\个人名字3、单击按钮,弹出“新建工程向导之三”对话框,在对话框中输入工程名称:“我的工程1”,在工程描述中输入:“机械手控制系统”4、单击“完成”。
5、弹出对话框,选择“是”按钮,将新建工程设为组态王当前工程。
5.3.2 设计图形界面要实现的整体效果新建画面的方法:单击工程浏览器左边“工程目录显示区”中“画面”项,右面“目录内容显示区”中显示“新建”图标,鼠标双击该图标,弹出“新画面”对话框。
图形制作:机械手控制系统——机架,机械手,工件,两个按钮(启动按钮、复位按钮),8个指示灯(下移、上移、左移、右移、夹紧、放松、启动、复位),两个离散量输出(启动标志、停止标志)。
5.3.3构造数据库变量在工程浏览器中左边的目录树中选择“数据词典”项,右侧的内容显示区会显示当前工程中所定义的变量。
双击“新建”图标,弹出“定义变量”属性对话框。
组态王的变量属性由基本属性、报警配置、记录配置三个属性页组成。
需要定义的变量有:输入对象类型说明启动按钮内存离散机械手启动控制信号复位按钮内存离散机械手复位控制信号放松阀内存离散机械手动作控制——放松阀夹紧阀内存离散机械手动作控制——夹紧阀下移阀内存离散机械手动作控制——下移阀上移阀内存离散机械手动作控制——上移阀左移阀内存离散机械手动作控制——左移阀右移阀内存离散机械手动作控制——右移阀机械手X 内存实数机械手水平移动量机械手Y 内存实数机械手垂直移动量工件X 内存实数工件水平移动量工件Y 内存实数工件垂直移动量运行标志内存离散机械手运行标志停止标志内存离散机械手停止标志次数内存实数机械手动作的时间5.3.4动画连接本项目中需要制作动画效果的部分包括:1、4号矩形的动画连接。
机械手控制系统操作手册
HC-S3机械手控制系统操作手册1 系统配置及安装1.1 基本配置1、8寸真彩触摸屏2、三轴伺服控制板3、I/O板4、电源部分(2个电源供应器)5、通讯线1.2 系统的安装1、配线作业必须由专业电工进行。
2、确认电源断开后才能开始作业。
3、请安装于金属等阻燃物上并远离可燃物。
4、使用时必须安全接地。
5、外部电源发生异常,控制系统会发生故障,为使整个系统安全工作,请务必在控制系统的外部设置安全电路。
6、安装、配线、运行、维护前,必须熟悉本说明书内容;使用时也必须熟知相关机械、电子常识及一切有关安全注意事项。
7、安装控制器的电箱,应具备通风良好、防油、防尘的条件。
若电控箱为密闭式则易使控制器温度过高,影响正常工作,须安装抽风扇,电箱内适宜温度为50℃以下,不要使用在结露及冰冻的地方。
8、控制器安装应尽量避免与接触器、变压器等交流配件布置过近,避免不必要的突波干扰。
注意:处理不当可能会引起危险,包括人身伤害或设备事故等。
2 操作面板2.1 外观及说明按键区域速度调节旋转编码开关状态灯选择开关急停开关轴动作键页面切换2.2 主画面及轴定义2.2.1 主画面说明2.2.2 机械手轴定义Z 轴:机械手的横入、横出轴。
X1轴:机械手主臂的前进、后退轴。
Y1轴:机械手主臂的上升、下降轴。
X2轴:机械手副臂的前进、后退轴。
Y2轴:机械手副臂的上升、下降轴。
C 轴:机械手治具水平、垂直轴。
B 轴:机械手治具旋转轴。
用户权限当前模具当前轴位置报警信息状态栏3 运行模式机械手有手动、停止、自动三种运行状态,将状态选择开关旋至左边档位为手动状态,在该状态下可对机械手进行手动操作;将状态选择开关旋至中间档位为停止状态,在该状态下机械手停止所有动作,只可对机械手进行原点复归操作。
将状态选择开关旋至右边档位,并按一次“启动”键,机械手即进入自动运行状态。
3.1 原点复归为了使机械手能够正确的自动运行,每次打开电源后,必须在停止状态下进行原点复归动作。
机械手控制装置说明书

目录摘要....................................................... Abstract.......................................................第一章绪论.............……………………………………………...1.1 本课题的意义 (3)1.2 本文的主要工作 (3)1.3选择设计方案 (3)第二章PLC 的概述 (4)2.1 PLC的基本知识 (4)2.2 PLC的应用与前景 (5)第三章PLC 的编程语言 (7)3.1梯形图编程语言 (7)3.2 功能块图编程语言 (8)3.3 西门子S7-200的编程语言…………………………..第四章PLC控制机械手的设计 (9)4.1 各电器设备的制方式及控制要求 (10)4.2电器元件设备的选择 (12)4.3控制系统的软、硬件设计 (13)第五章设计小结 (33)第六章谢辞 (34)参考文献 (35)摘要在工业生产和其他领域内,由于工作的需要,人们经常受到高温、腐蚀及有毒气体等因素的危害,增加了工人的劳动强度,甚至于危机生命。
机械手就在这样诞生了,机械手是工业机器人系统中传统的任务执行机构,是机器人的关键部件之一。
机械手的机械结构采用滚珠丝杆、滑杆、气缸等机械器件组成;电气方面有步进电机、驱动模块、传感器、开关电源、电磁阀、等电子器件组成。
该装置涵盖了可编程控制技术,位置控制技术、气动技术、检测技术等,是机电一体化的典型代表仪器之一。
本文介绍的机械手是由PLC输出两路脉冲,分别驱动横轴、竖轴步进电机驱动器,控制机械手横轴和竖轴的精确定位,微动开关将位置信号传给PLC主机;直流电机拖动手爪和底盘旋转,位置信号由旋转码盘和接近开关反馈给PLC主机;电磁阀控制气开阀的开关来控制机械手手爪的张合,从而实现机械手精确运动的功能。
本课题拟开发的物料搬运机械手可在空间抓放物体,动作灵活多样,可代替人工在高温和危险的作业区进行作业,并可根据工件的变化及运动流程的要求随时更改相关参数。
机械手操作规程详解

平常关电源时,蓝色管有空 关电源时,蓝色管有空气。
气。
成品臂吸功能,利用真空产 生器产生吸的动作。
固定治具的部份称为侧姿
回正
组,而治具固定板成垂直方 向,称为回正,而此键为回
无
正键。
治具固定板成水平,称为侧
侧姿
姿,而此键为侧姿键。
备用 1 备用 2 备注 3
限使用于手动时,将马达刹车放开,方便使用者操作移动机械 手时。(Altas 系列无此功能) 限使用于手动时,将备用(Y24)ON-OOF 操作
RESET 复归
Enter 输入
文件标题
机械手操作规程
文件编号
制定部门 注塑部 制定日期 2005.5.27 修订日期
页数:
7/18
7.2 功能键说明:
7.2.1
F1
Mode
PgDn ESC
F2
模式设
换页
退出
定
功能键,根据屏幕(功能显示区)内各项显示,配合 F1~ESS 按键,选择欲进入功
能。
7.2.2 +
限使用于手动时,将备用(Y30)ON-OOF
AUX4 AUX5
备注 4,5
文件标题
机械手操作规程
制定部门 注塑部 制定日期 2005.5.27
文件编号 修订日期
页数:
9/18
按键符号
RESET 复归
Enter 输入
EMERGENCY
STOP
按键名称 辅助键
成品臂功能
料头臂功能
当紧急停止复归后须按此“RESET”键才可使系统进 入手动操作状态,或发生警报时解除警报用
4.操作流程
作业` 流程
负责人
阅读本操作规程
机床产品课教育训练控制器篇V41

四、权限管理
• 使用者分类与权限范围 • 使用者分类与对应之帐号、密码
(注1)帐号与密码由英文或数字组成,长度范围为1~8个字元。 (注2)新代客服人员帐号登入时,使用↑↓切换栏位到密码栏时萤幕左下 角会出现提示检查码,请用此验证码向苏州企推部或台湾技术中心取得 密码。
I.
关闭DHCP:若使用跳线请选择「关闭」;若使用网络线请选择「开启」,此时上述「地址设定」与「子网掩码」
之设定将无效。
J.
联机使用者处输入「GUEST」。
K. 按下「F1确定键」后,重新开启控制器即可完成设定。
机床产品课教育训练控制器篇V41
一、联网
1、联网设置
CE系统设定
A. 于控制器主画面依序按下「F6参数设定」→「F10下一页」→「F3网络设定」即可开启网络设定画面。
• IF ( @502 = #1036 OR 0 = #1036 OR @481 < #1036 ) THEN
• M99; //判断目标刀号=主轴 目前刀号/零号刀/大于总刀数就跳 出换刀MACRO
• END_IF; • @102:=#1036; //储存目标刀号
• G90 G53 Z#26023; //Z轴移动到 换刀点参数Pr2803
F.
共享目录名称处输入PC端所分享之文件夹名称(需与PC端设定一致)。
G. 使用者名称处输入「GUEST」。 H. 按下「F1确定键」后,重新开启控制器即可完成设定。
机床产品课教育训练控制器篇V41
一、联网
2、异常处理
• DOS常见网络联机警报与排除方式 • n Error 52: A duplicate workgroup or computer name exists on
机械手操作说明手册
精心整理机械手操作说明书一, 简介:本设备主体部包括以下机构: 1,上下伺服机械臂:1.5KW 三菱伺服;气动抓胎器;横走气缸; 2,输送线:400W 三菱变频器及电机两台;检测用对射光电;定中气缸;3,主要电气部件品牌及明细表:主要电气部件明细:序号 1 2 3 4 5材料名称 PLC触摸屏 伺服电机 伺服驱动器 输送电机用变频器材料规格 FX3U-48MT-001 DOP-B05S100HF-SP152B MR-J3-200A FR-E740-0.4-CHT用量 单位品牌1台三菱1个台达1台三菱1台三菱2台三菱页脚内容6 三相智能伺服变压器7开关电源8小型断路器9小型断路器10小型断路器11小型断路器12交流接触器13接近开关14电源滤波器15继电器16继电器端子座17超声波传感器18对射光电精心整理 IST-C-045 NES-150-24 DZ47-60/3P/D16A DZ47-60/2P/D6A DZ47-60/2P/D10A DZ47-60/3P/D25A LC1-D1810M5C RN05-N(17*17)3 米 PNF221-G-2A RJ2S-CL-D24 RJ2S-05B UB800-18GM40-E4-V1 PZ-G52N二, 操作说明:1 台 三诺科技1 台 台湾明纬1个正泰1个正泰2个正泰2个正泰1个施耐德5 个 台湾 RIKO1个埃德8个idec8个idec1个倍加福4对基恩士2.1 操作前注意事项:机械手运行范围内不要有人员站立. 确认抓手用输入气源是否打开且压力达到 0.5MPa 及以上。
2.2 操作说明:2.2.1,简要说明: 1,本系统人机操作画面,支持中英文两种语言方式。
操作者可以在进入系统后的初始开机画面,选择指定的操作语言。
2,本系统有三种运行方式,分别是: 点动运行方式:指的是上下伺服在微动调试时的一种操作方式。
这种方式下屏上的 操作功能按键只有在受控时,相应的运动部件才会动作。
机械手控制系统组成

机械手控制系统组成
机械手控制系统是由控制器、程序、执行器、传感器等多个组成部分构成的。
下面将对机械手控制系统中的各个组成部分进行详细介绍。
1. 控制器
机械手控制器是机械手系统的重要组成部分,它可以控制机械手执行各种复杂运动,实现工业自动化。
控制器通常由微处理器、内存、输入输出接口、通讯接口等多种部分构成。
控制器可以根据机械手的动作要求来编写控制程序,控制机械手执行各种动作。
2. 程序
机械手的控制程序是用来控制机械手的运动,控制程序通常由工艺流程、校准程序、安全保护程序等多种程序组成。
程序可以根据工艺要求对机械手进行编程,使机械手可以进行预定的操作。
3. 执行器
机械手控制系统中的执行器主要负责执行机械手的各种动作,执行器通常包括电机、气缸、减速器等多种设备。
执行器可以根据机械手的运动要求,将能量转化为机械运动。
4. 传感器
5. 驱动器
机械手控制系统中的驱动器负责把控制器输出的电信号转化为机械运动所需要的电动信号,驱动器通常由功率部分、控制部分等多种部分构成。
驱动器可以将电信号转化为能量信号,控制执行器完成机械运动的执行。
6. 通信接口
机械手控制系统中的通信接口负责与其他系统进行连通,通信接口通常包括网口、串口、无线通讯等多种类型。
通信接口可以让机械手与其他系统进行数据交互,实现机械手的自动化控制和调节。
总之,机械手控制系统是由多个组成部分共同构成的,它们共同完成机械手的运动任务,实现工业自动化生产,提高生产效率和质量。
机械手操作说明书

操作说明机械手 操 作 说 明 书操作说明一, 简介:本设备主体部包括以下机构: 1, 上下伺服机械臂:1.5KW 三菱伺服;气动抓胎器;横走气缸; 2, 输送线:400W 三菱变频器及电机两台;检测用对射光电;定中气缸; 3,主要电气部件品牌及明细表:主要电气部件明细:序号 材料名称 1 PLC 2 触摸屏 3 伺服电机 4 伺服驱动器 5 输送电机用变频器 6 三相智能伺服变压器 7 开关电源 8 小型断路器 9 小型断路器 10 小型断路器 11 小型断路器 12 交流接触器 13 接近开关 14 电源滤波器 15 继电器 16 继电器端子座 17 超声波传感器 18 对射光电材料规格 FX3U-48MT-001 DOP-B05S100 HF-SP152B MR-J3-200A FR-E740-0.4-CHT IST-C-045 NES-150-24 DZ47-60/3P/D16A DZ47-60/2P/D6A DZ47-60/2P/D10A DZ47-60/3P/D25A LC1-D1810M5C RN05-N(17*17) 3 米 PNF221-G-2A RJ2S-CL-D24 RJ2S-05B UB800-18GM40-E4-V1 PZ-G52N用量 单位 1台 1个1台 1台 2台1台 1台 1个 1个 2个 2个 1个 5个 1个 8个 8个 1个 4对品牌 三菱 台达 三菱 三菱 三菱 三诺科技 台湾明纬 正泰 正泰 正泰 正泰 施耐德 台湾 RIKO 埃德 idec idec 倍加福 基恩士二, 操作说明:2.1 操作前注意事项:机械手运行范围内不要有人员站立. 确认抓手用输入气源是否打开且压力达到 0.5MPa 及以上。
2.2 操作说明:2.2.1,简要说明:操作说明1,本系统人机操作画面,支持中英文两种语言方式。
操作者可以在进入系统后的初 始开机画面,选择指定的操作语言。
机械手说明书

机械手说明书(总29页) -CAL-FENGHAI.-(YICAI)-Company One1-CAL-本页仅作为文档封面,使用请直接删除三自由度直角坐标机械手设计作者姓名汪增帅专业机械设计制造及其自动化指导教师姓名付秀琢专业技术职务目录摘要 (1)第一章概述 (2)机械手概述 (2)机械手历史和现状 (4)机械手发展趋势 (6)第二章总体设计 (8)机械手组成及各部分关系 (8)总体方案拟定 (9)驱动方式的选择 (11)第三章机械系统设计 (13)机械手的结构设计 (13)传动结构的设计 (15)导轨的设计 (20)轴承的选择 (21)电机的选择 (22)第四章总结 (25)致谢 (25)参考文献 (26)摘要在工业上,自动控制系统有着广泛的应用,如工业自动化机床控制,计算机系统,机械手等。
而工业机械手是相对较新的电子设备,它正开始改变现代化工业面貌。
本设计为三自由度直角坐标型工业机械手,其工作方向为三个直线方向。
在控制器的作用下,它执行将工件从一个地方搬到另一个地方这一简单的动作,本文是对整个设计工作较全面的介绍和总结。
关键词:三自由度直角坐标工业机械手ABSTRACTIt is starting to change the modern industrial landscape. The design for the industrial robot of three degrees of freedom Cartesian coordinate its work direction for the three linear directions. The role of the controller, which performs the workpiece moved from one place to another place of this simple action, This is the entire design more comprehensive introduction and summary.Keywords:three degrees of freedom; rectangular coordinates;industrial robot第一章概述机械手概述在现代工业中,生产过程的机械化、自动化已成为突出的主题。