C++类模板的匹配规则
模板的特化与偏特化
摘要:本文通过例子介绍了在C++标准库中广泛使用的模板特化和偏特化,并指出了模板特化和偏特化的定义规则和应用规则。
关键词:模板、特化、偏特化1.引言C++中的模板分为类模板和函数模板,虽然它引进到C++标准中的时间不是很长,但是却得到了广泛的应用,这一点在STL中有着充分的体现。
目前,STL 在C++社区中得到了广泛的关注、应用和研究。
理解和掌握模板是学习、应用和研究以及扩充STL的基础。
而STL模板实例中又充斥着大量的模板特化和偏特化。
2.模板的定义(1) 类模板定义一个栈的类模板,它可以用来容纳不同的数据类型说明如下:template <class T>class stack {private:list* top;public:stack();stack(const stack&);~stack();void push(T&);T& pop();//…};上述定义中,template告诉编译器这是一个模板,尖括号中的<class T >指明模板的参数,可以有一个或多个,具体实现时由用户指定,其中template <class T >中的关键字class可以用关键字typename来代替。
类模板的使用除了要在声明时指明模板参数外,其余均与普通的类相同,例如:stack<int>int_stack;stack<char>ch_stack;stack<string>str_stack;int_stack.push(10);ch_stack.push(…z‟);str_stack.push(“c++”);(2)函数模板假设现在要定义一个max函数来返回同一类型(这种类型是允许比较的)两个值的最大者.template<class T>T mymax(const T&t1,const T&t2){ return t1 <t2 ? t2 : t1; }template <class T>的意义与类模板定义中相同。
c++ template 实现原理

c++ template 实现原理C++模板是一种编程工具,它可以在编译时进行泛型编程。
它允许我们在代码中定义一种通用的类型或算法,使其适用于多种不同的类型,而无需为每种新类型编写新的代码。
C++模板的实现原理可以分为两个阶段:实例化和实例化后的代码生成。
在实例化阶段,编译器扫描模板代码,找到模板声明,并根据模板被调用时的参数类型,生成模板实例。
例如,假设我们有一个模板函数add,并在代码中调用该函数add<int>(2, 3)。
在实例化阶段,编译器会根据模板函数add的定义,生成一个具有int类型参数的实例。
这个过程称为模板实例化。
在实例化后的代码生成阶段,编译器会根据生成的模板实例,生成对应的函数或类代码。
这些代码与普通的函数或类定义具有相同的形式,只是参数类型被模板参数替代。
生成的代码会被链接器处理,以生成最终的可执行文件。
C++模板的实现原理依赖于编译器的支持。
在编译器实现中,有两种常见的模板实现方法:编译时生成和二次编译。
编译时生成是指编译器在实例化阶段直接将模板代码转换为对应的实例代码。
在这种实现方法中,编译器会在模板被调用时生成对应的实例代码,并将其插入到编译单元中。
这种方法的优点是生成的代码效率高,缺点是编译时间可能会增长,特别是当模板被多次实例化时。
二次编译是指编译器在生成模板实例后,使用实例化后的代码进行二次编译。
在这种实现方法中,编译器会将模板实例生成为中间表示形式,然后在实例化完成后,将中间表示形式作为输入,生成对应的机器代码。
这种方法的优点是编译时间快,缺点是生成的代码可能会比编译时生成的代码效率低一些。
无论是编译时生成还是二次编译,模板实例化都是通过对模板参数类型进行替换来完成的。
编译器会根据调用模板时的参数类型,在模板代码中进行相应的替换。
这个过程称为模板参数推导。
模板参数推导是通过编译器进行类型推导来实现的。
编译器会根据模板代码和调用代码中的参数类型,推导出模板参数的具体类型。
opencv模板匹配6种方法 总结

opencv模板匹配6种方法总结
OpenCV中的模板匹配是一种常见的图像处理技术,用于在图像中查找与
给定模板相匹配的区域。
以下是OpenCV中模板匹配的6种方法:
1. ():这是最基本的方法,它使用滑动窗口在源图像中查找与模板相匹配的区域。
它返回一个包含每个匹配区域位置和相似度的二维数组。
2. _CCOEFF:这是使用余弦相似度作为匹配度量的一种方法。
它计算模板
和源图像之间的余弦相似度,并返回与模板匹配的区域位置和相似度。
3. _CCOEFF_NORMED:这是使用归一化余弦相似度作为匹配度量的一种
方法。
它计算模板和源图像之间的归一化余弦相似度,并返回与模板匹配的区域位置和相似度。
4. _CCORR:这是使用相关系数作为匹配度量的一种方法。
它计算模板和源图像之间的相关系数,并返回与模板匹配的区域位置和相似度。
5. _CCORR_NORMED:这是使用归一化相关系数作为匹配度量的一种方法。
它计算模板和源图像之间的归一化相关系数,并返回与模板匹配的区域位置和相似度。
6. _SQDIFF:这是使用平方差异作为匹配度量的一种方法。
它计算模板和源图像之间的平方差异,并返回与模板匹配的区域位置和差异值。
总结来说,这6种方法都使用了不同的相似度度量来在源图像中查找与模板相匹配的区域。
其中,()是最基本的方法,而其他方法则提供了不同的相似度度量选项。
选择哪种方法取决于具体的应用场景和需求。
ncc 模板匹配算法 -回复

ncc 模板匹配算法-回复NCC 模板匹配算法- 模式识别领域中的利器在模式识别的领域中,模板匹配算法被广泛应用于各种图像处理任务中,特别是在图像分割、目标识别和模式检索等应用中。
其中,一种重要的模板匹配算法是NCC(Normalized Cross-Correlation)模板匹配算法。
本文将介绍NCC 模板匹配算法的基本原理、算法流程和应用案例。
一、算法原理NCC 模板匹配算法基于归一化的互相关系数(normalizedcross-correlation coefficient)来计算图像之间的相似度。
其核心思想是将待匹配图像与参考模板进行逐像素比较,并计算它们之间的相似度。
NCC 算法可以衡量两幅图像的像素值的相关性,从而判断它们的匹配程度。
NCC 模板匹配算法的基本步骤如下:1. 输入待匹配图像和参考模板图像。
2. 根据图像大小和模板尺寸的关系,遍历待匹配图像的每个像素。
3. 对于每个像素,取以其为中心的模板区域,并对其进行灰度归一化处理。
4. 计算归一化的互相关系数,即算法的关键步骤。
通过计算待匹配图像的模板区域与参考模板之间的相似度,可以得到相关系数,值越大表示相似度越高。
5. 根据计算的相关系数,确定图像中匹配度最高的位置。
二、算法流程NCC 模板匹配算法的具体流程如下:1. 将待匹配图像和参考模板图像进行灰度化处理,转换为灰度图像。
2. 设定模板尺寸和步长。
3. 遍历待匹配图像的每个像素,以其为中心截取模板区域。
4. 对待匹配图像和参考模板的模板区域进行灰度归一化处理。
5. 计算归一化的互相关系数,通过对应像素的相乘再求和的方式计算互相关系数。
6. 对计算得到的互相关系数进行归一化处理,使其取值范围在[0, 1]之间。
7. 根据归一化的互相关系数确定匹配程度最高的位置,并输出结果。
三、应用案例NCC 模板匹配算法在实际应用中具有广泛的应用。
以下是一些典型的应用案例:1. 目标识别:NCC 模板匹配算法可以用于识别图像中的目标物体。
模板匹配及其类型
模板匹配及其类型
《模板匹配及其类型》
模板匹配是一种在计算机领域中常用的技术,用于在大规模的数据中查找与特定模式或模板相似的项。
它的核心思想是通过比较待匹配的数据与已知的模板之间的相似度,来确定是否存在匹配。
1. 字符串匹配:这是最常见的模板匹配类型,用于在文本数据中查找与特定字符串模式匹配的项。
例如,在一个文本文件中查找特定的单词或短语。
2. 图像匹配:在计算机视觉领域,模板匹配用于在图像中查找与特定图像模式相似的区域。
它可以用于对象识别、目标跟踪等任务。
3. 数据挖掘:在数据挖掘中,可以使用模板匹配来发现数据集中的模式或规律。
例如,通过比较不同数据集的特征,可以找到相似的数据集或模式。
4. 音频和视频匹配:在音频和视频处理中,可以使用模板匹配来识别特定的音频或视频模式。
它可以用于语音识别、音乐识别、视频内容分析等任务。
5. 生物信息学:在生物信息学领域,模板匹配用于在生物序列中查找相似的模式。
例如,在基因序列分析中,可以使用模板匹配来查找特定的基因或蛋白质序列。
总的来说,模板匹配是一种通用的技术,可以应用于各种领域和任务。
它的关键在于定义合适的模板和相似度度量方法,以准确地识别和匹配数据中的模式。
谢谢大家!。
模板匹配

24
pyramid
图像金字塔
图像金字塔
26
在构建图像金字塔的过程中,速度是非常重要的,通常优先采用 2*2 的均值滤波器平滑图像,也就是说求2*2区域中的所有像素的平均 灰度值。
当在金字塔的最高层搜索到相应的模板实例时,将匹配点的坐标乘 以2,映射到金字塔的下一层。
此外,由于金字塔的最高层目标物体的灰度值可能发生实质性的变 化,这要求在匹配金字塔的较高层时应使用较为宽松的匹配阈值。
匹配过程
将模板沿着图像逐像素扫描,模板每移动一次 就会得到一个当前的Hausdorff距离。当模板 中的边缘点与图像中的边缘点非常接近,且图 像中的边缘点与模板中的边缘点也非常接近时, 会得到一个最小的Hausdorff距离,此时为最 优匹配。
改进
当图像中出现遮挡情况下算法效果不佳的主 要原因是由于在计算h (T, E) 时采用了最大 距离。如果用第k 大距离代替最大距离, Hausdorff距离将对100 / % k n 的遮挡可 靠,其中n表示模板边缘区域中像素点的数 量。。
������ + ������, ������ + ������
− ������������] ������
7
基于灰度值的模板匹配算法—NCC
从NCC的定义不难看出,-1≤ncc(r,c)≤1。当ncc(r,c)=±1时, 结果
图像与模板成线性关系: f(r+u,c+v)=at(u,v)+b
当 ncc(r,c)=1时,a>0,此时图像与模板的极性相同; 当 ncc(r ,c)=-1时, a<0 ,此时图像与模板的极性相反。
?
6
01 S A D : 计 算 模 板 与 图 像 之 间 差 值 的 绝 对 值 总 和
模板匹配算法
1、模板匹配法:在机器识别事物的过程中,常常需要把不同传感器或同一传感器在不同时间、不同成像条件下对同一景象获取的两幅或多幅图像在空间上对准,或根据已知模式到另一幅图像中寻找相应的模式,这就叫匹配。
在遥感图像处理中需要把不同波段传感器对同一景物的多光谱图像按照像点对应套准,然后根据像点的性质进行分类。
如果利用在不同时间对同一地面拍摄的两幅照片,经套准后找到其中特征有了变化的像点,就可以用来分析图中那些部分发生了变化;而利用放在一定间距处的两只传感器对同一物体拍摄得到两幅图片,找出对应点后可计算出物体离开摄像机的距离,即深度信息。
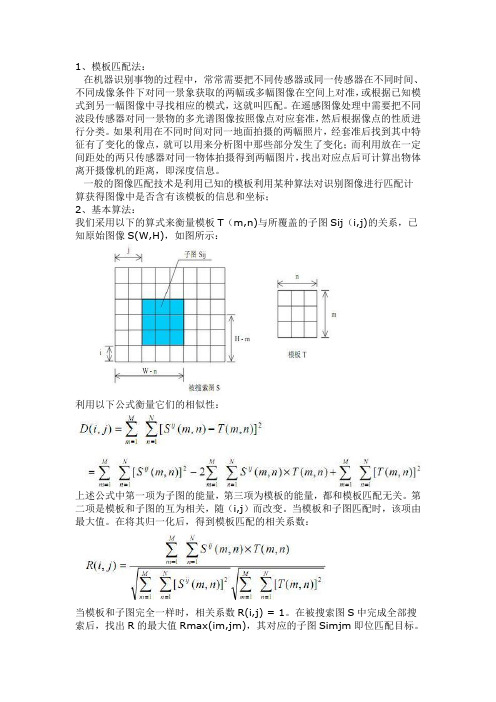
一般的图像匹配技术是利用已知的模板利用某种算法对识别图像进行匹配计算获得图像中是否含有该模板的信息和坐标;2、基本算法:我们采用以下的算式来衡量模板T(m,n)与所覆盖的子图Sij(i,j)的关系,已知原始图像S(W,H),如图所示:利用以下公式衡量它们的相似性:上述公式中第一项为子图的能量,第三项为模板的能量,都和模板匹配无关。
第二项是模板和子图的互为相关,随(i,j)而改变。
当模板和子图匹配时,该项由最大值。
在将其归一化后,得到模板匹配的相关系数:当模板和子图完全一样时,相关系数R(i,j) = 1。
在被搜索图S中完成全部搜索后,找出R的最大值Rmax(im,jm),其对应的子图Simjm即位匹配目标。
显然,用这种公式做图像匹配计算量大、速度慢。
我们可以使用另外一种算法来衡量T和Sij的误差,其公式为:计算两个图像的向量误差,可以增加计算速度,根据不同的匹配方向选取一个误差阀值E0,当E(i,j)>E0时就停止该点的计算,继续下一点的计算。
最终的实验证明,被搜索的图像越大,匹配的速度越慢;模板越小,匹配的速度越快;阀值的大小对匹配速度影响大;3、改进的模板匹配算法将一次的模板匹配过程更改为两次匹配;第一次匹配为粗略匹配。
取模板的隔行隔列数据,即1/4的模板数据,在被搜索土上进行隔行隔列匹配,即在原图的1/4范围内匹配。
C++之模板(Template)

C++之模板(T emplate)模板是C++提供进行编程的一种类书工具。
所以在看本文以前请先了解一下C++类书的概念及相关的知识。
1.模板的概念:模办是实现类属机制的一种工具,它的功能非常强,它是无约束类属机制和约束类属机制的集合。
它可以让用户构造模板函数。
模板,对象,函数之间的关系见下图:2.函数模板与模板函数:先见下例:#include <iostream.h>template<class T> //模板声明T max(T x,T y) //定义模板{return (x>y)? x:y;}main(){int i=10,j=56;float x1=50.34, x2=56.34;double y1=673.36, y2=465.972;cout<<"the max of i, j is:"<<max(i, j)<<"\n";cout<<"the max of x1, x2 is:" <<max(x1,x2)<<"\n";cout<<"the max of y1, y2 is:" <<max(y1,y2)<<"\n";return 1;}上面的这个程序虽然只是实现一个很简单的比较大小的问题,但如果不用模板,而用我们以前的方法,由于参数类型和返回值类型不同将需要三个函数来实现,这样是十分麻烦的。
模板成功的解决了这个问题,程序中生成了三个模板函数,其中max(i,j)用模板实参int将类型实参数T进行了实例化;max(x1,x1)用模板实参float将类型参数T进行了实例化;max(y1,y2)用模板实参double将类型参数T进行了实例化。
c++中template的用法

在C++中,`template`允许您创建泛型(generic)类或函数,从而实现编写一次代码并应用于多种数据类型的目标。
`template`可以消除重复代码,提高代码可维护性。
以下是`template`的一些使用示例:1. 模板函数(Function templates):#include <iostream>// 函数模板template<typename T>T max(T a, T b) {return a > b ? a : b;}int main() {int a = 5, b = 7;double x = 3.5, y = 4.5;std::cout << "Max of int: " << max(a, b) << std::endl;std::cout << "Max of double: " << max(x, y) << std::endl;return 0;}在这个示例中,`max`函数是一个泛型函数,可以处理不同类型的参数。
`max(a, b)`和`max(x, y)`将分别为`int`和`double`类型参数实例化两个不同版本的函数。
1. 模板类(Class templates):#include <iostream>// 类模板template<typename T>class Container {public:Container(T value) : value(value) {}T getValue() const {return value;}void setValue(T newValue) {value = newValue;}private:T value;};int main() {Container<int> intContainer(42);Container<double> doubleContainer(3.14);std::cout << "Int container value: " << intContainer.getValue() << std::endl;std::cout << "Double container value: " << doubleContainer.getValue() << std::endl;return 0;}在这个示例中,`Container`是一个泛型类,它允许您创建包含不同类型数据的实例。
c++ 模板函数匹配规则
c++ 模板函数匹配规则
以下是一个简单的C++模板函数匹配规则示例:
```c++
#include <iostream>
template <typename T>
void print(T value) {
std::cout << "Value: " << value << std::endl;
}
int main() {
print(10); // 匹配int 类型的模板函数
print(3.14); // 匹配double 类型的模板函数
print("Hello"); // 匹配const char* 类型的模板函数
return 0;
}
```
在上面的示例中,我们定义了一个模板函数`print`,它可以接受任何类型的参数。
在`main` 函数中,我们使用不同的类型调用`print` 函数,编译器会自动
根据参数类型选择匹配的模板函数。
在这个例子中,当我们将`10` 作为参数传递给`print` 函数时,编译器会选择接受`int` 类型参数的模板函数;当我们将`3.14` 作为参数传递给`print` 函数时,编译器会选择接受`double` 类型参数的模板函数;当我们将`"Hello"` 作为参数传递给`print` 函数时,编译器会选择接受`const char*` 类型参数的模板函数。
需要注意的是,如果编译器无法找到匹配的模板函数,将会报错。
因此,在使用模板函数时,需要确保参数类型与模板函数的参数类型相匹配,或者使用默认模板参数来避免类型不匹配的问题。
C#类型检查和强制转换以及模式匹配
C#类型检查和强制转换以及模式匹配在C#中可以使⽤以下运算符和表达式来执⾏类型检查或类型转换:is 运算符:检查表达式的运⾏时类型是否与给定类型兼容,语法是:E is T如现有变量high,if(high is int){int++;}as 运算符:⽤于将表达式显式转换为给定类型(如果其运⾏时类型与该类型兼容)语法是:E as T(等效于:E is T ? (T)(E) : (T)null)⽐较以上可知,is只是检查给定类型是否可转换为给定类型,as运算符将表达式结果显式转换为给定的引⽤或可以为 null 的值类型强制转换表达式(cast expression):执⾏显式转换,语法是:(T)E在运⾏时,显式转换可能不会成功,强制转换表达式可能会引发异常。
这是也是强制转换和as的区别,as 运算符永远不会引发异常。
在这⾥再说⼀下模式匹配(pattern matching)模式匹配可以理解为类型检查的扩展,当测试值匹配某种类型时,将创建⼀个该类型的变量(这是和以上as和强制转换的区别)有is类型模式,语法是 E IS T varname,如下代码:public static double ComputeAreaModernIs(object shape){if (shape is Square s)return s.Side * s.Side;else if (shape is Circle c)return c.Radius * c.Radius * Math.PI;else if (shape is Rectangle r)return r.Height * r.Length;// elidedthrow new ArgumentException(message: "shape is not a recognized shape",paramName: nameof(shape));}switch语句,如下代码:public static double ComputeArea_Version3(object shape){switch (shape){case Square s when s.Side == 0:case Circle c when c.Radius == 0:return 0;case Square s:return s.Side * s.Side;case Circle c:return c.Radius * c.Radius * Math.PI;default:throw new ArgumentException(message: "shape is not a recognized shape",paramName: nameof(shape));}}模式匹配扩展了switch语句的使⽤范围。
ncc 模板匹配算法
ncc 模板匹配算法NCC模板匹配算法,即最近邻分类算法(Nearest Class Classifier),是一种常用的模式识别和图像处理技术。
它通过计算待分类样本与已知样本之间的相似度,选择最近邻样本确定其所属类别。
在本文中,我们将一步一步地回答关于NCC模板匹配算法的问题,以帮助读者了解该算法的原理和应用。
第一步:什么是NCC模板匹配算法?NCC模板匹配算法是一种基于相似度度量的分类算法。
它通过计算待分类样本与已知样本之间的相似度,将待分类样本划分到与之最相似的已知类别中。
相似度度量通常使用特征向量之间的欧氏距离或相关性来描述。
第二步:NCC模板匹配算法的原理是什么?NCC模板匹配算法的原理主要包括特征提取和最近邻分类两个步骤。
在特征提取阶段,算法会从已知样本中提取出代表各类别特征的模板。
这些模板可以是特征向量、图像或其他描述类别特征的数据结构。
在最近邻分类阶段,算法会计算待分类样本与所有已知样本之间的相似度,并选择与之最相似的已知样本确定其类别。
第三步:NCC模板匹配算法的实现过程是怎样的?NCC模板匹配算法的实现过程可以分为以下几个步骤:1. 特征提取:从已知样本中提取出代表各类别特征的模板。
这可以通过计算已知样本的特征向量、图像的特征描述子等方法实现。
2. 相似度度量:对于待分类样本,计算其与所有已知样本之间的相似度。
常用的相似度度量方法包括欧氏距离、相关性等。
3. 最近邻分类:选择与待分类样本最相似的已知样本,将其标记为该待分类样本所属的类别。
4. 输出结果:将分类结果输出,可以是直接输出类别标签或输出与每个已知类别的相似度值。
第四步:NCC模板匹配算法的优缺点是什么?NCC模板匹配算法具有以下优点:1. 简单易实现:NCC模板匹配算法的实现相对简单,不需要复杂的训练过程和特征选择。
2. 高效性能:该算法的时间复杂度通常较低,能够快速进行分类。
3. 鲁棒性:NCC模板匹配算法对于一定程度的噪声和变形具有较好的鲁棒性。
c语言中if和elseif的匹配规则

c语言中if和elseif的匹配规则
在C语言中,if和elseif的匹配规则是根据条件表达式的结果进行判断和执行。
在使用if和elseif语句的时候,按照从上到下的顺序逐个判断条件表达式。
当条件表达式为真(非零)时,执行对应的代码块,并跳出if语句;当条件表达式为假(零)时,继续判断下一个条件表达式。
如果所有的条件表达式都为假,则执行else语句块(如果存在的话),或者继续执行后面的代码。
需要注意的是,elseif之前只能有一个if语句,并且elseif可以有多个,但是只有一个else语句。
下面是一个示例代码:
```c
int num = 5;
if (num > 0) {
printf("num is positive\n");
}
else if (num == 0) {
printf("num is zero\n");
}
else {
printf("num is negative\n");
}
```
以上代码会根据num的值输出相应的结果。
在这个例子中,num的值为5,因此条件表达式`num > 0`为真,所以输出"num is positive"。
模板匹配算法
模板匹配算法模板匹配算法(Template Matching Algorithm)是一种基于图像识别的算法, 它可以根据已有的模板信息, 对于待匹配图像中的目标进行检测和识别。
这种算法在计算机视觉、机器人控制、智能交通、安防等领域中得到了广泛的应用。
一、算法原理模板匹配的过程可以简单描述为: 在待匹配图像中搜索与指定模板最相似的局部区域, 并标记其所在位置。
匹配程度的计算可以通过两幅图像的灰度值来实现。
模板匹配算法主要基于以下原理:1、模板图像与待匹配图像的灰度值变化连续和相似, 且待匹配图像与模板图像的尺寸关系一致。
2.相对于待匹配图像, 模板图像为小尺寸图像, 可以忽略旋转和放缩等影响。
基于以上原理, 我们可以通过以下几个步骤来实现模板匹配算法:1.读入待匹配图像和模板图像。
2.计算待匹配图像的灰度值和模板图像的灰度值, 并将其归一化。
3.在待匹配图像中进行滑动窗口操作, 将其分解为若干个小的局部区域。
4、在每个小局部区域内, 计算其灰度值和模板图像的灰度值之间的匹配程度, 并寻找与模板图像最相似的局部区域。
5、标记每个相似的局部区域的中心位置, 并绘制相应矩形框。
二、算法优缺点模板匹配算法是一种简单易懂, 容易实现的算法。
它具有以下几个优点:1.非常适合处理大尺寸且单一对象图像的匹配问题。
2、不需要复杂的预处理或模型训练, 不依赖于外部数据集或学习算法。
3.可以在较短的时间内完成匹配操作, 并对匹配结果确定性较高。
但是, 模板匹配算法也存在以下缺点:1.非常敏感于光照变化、噪声、目标遮挡等因素, 容易出现误报和漏报情况。
2、难以适用于多目标场景的处理, 难以达到真正的智能感知水平。
3、需要占用大量的计算资源和内存, 适用于小数据集的处理。
三、算法优化为了提高模板匹配算法的性能和鲁棒性, 一些优化措施可以采取, 包括:1、使用归一化的互相关函数(Normalized Cross-Correlation, NCC)来计算匹配程度, 从而避免光照和噪声等因素的影响。
分类 模板序列匹配算法
分类模板序列匹配算法什么是模板序列匹配算法?模板序列匹配算法是一种用来识别和匹配输入序列的算法。
它的核心思想是将模板序列与目标序列进行比较,并找到最佳匹配。
这种算法在许多领域中都有广泛的应用,例如文本分析、语音识别和图像处理等。
在本文中,我们将详细讨论模板序列匹配算法的原理、应用以及相关的优化技术。
1. 模板序列匹配算法的原理模板序列匹配算法的原理可以概括为以下几个步骤:首先,我们需要定义一个模板序列,它是我们要寻找的目标序列的参照。
模板序列一般由若干个元素组成,这些元素可以是字符、数字或者其他数据类型。
接下来,我们需要定义一个目标序列,它是我们要进行匹配的输入序列。
目标序列一般也由若干个元素组成,数量可以和模板序列不同。
然后,我们要对模板序列和目标序列进行比较。
这一步可以分为两个子步骤:首先,我们要确定模板序列和目标序列的起始位置;其次,我们要逐个比较它们对应位置上的元素。
最后,我们根据比较的结果来判断是否找到了匹配。
如果找到了匹配,我们可以输出匹配的位置和其他相关信息;如果没有找到匹配,我们需要继续进行下一轮的比较,直到找到最佳匹配或者所有可能的匹配都被尝试过。
2. 模板序列匹配算法的应用模板序列匹配算法在许多领域中都有广泛的应用。
下面是一些常见的应用场景:文本分析:在文本分析中,我们可以使用模板序列匹配算法来寻找特定模式的字符串。
例如,我们可以使用该算法来寻找特定的关键词或短语,并对其进行分类或分析。
语音识别:在语音识别中,我们可以使用模板序列匹配算法来将输入的语音信号与预定义的模板进行比较。
这样可以实现语音命令识别、语音转换等功能。
图像处理:在图像处理中,我们可以使用模板序列匹配算法来寻找特定的模式或特征。
例如,我们可以使用该算法来识别图像中的物体、边缘或轮廓。
3. 模板序列匹配算法的优化技术虽然模板序列匹配算法在实际应用中非常有用,但在处理大规模数据时可能会面临一些挑战。
为了加速匹配过程,我们可以采用一些优化技术。
python opencv模板匹配方法

在OpenCV中,模板匹配是一种找到一个图像(源图像)中最佳匹配某个模板图像位置的方法。
OpenCV提供了几种不同的模板匹配方法,包括:1. **cv2.TM_SQDIFF**:这是最严格的方法,它计算模板和源图像之间的平方差,然后找出平方差最小的位置。
2. **cv2.TM_SQDIFF_NORMED**:这种方法类似于上面的方法,但它归一化了平方差的结果。
3. **cv2.TM_CCORR**:这种方法计算模板和源图像之间的相关系数,并找出最大相关系数的位置。
4. **cv2.TM_CCORR_NORMED**:这种方法类似于上面的方法,但它归一化了相关系数的结果。
5. **cv2.TM_CCOEFF**:这种方法计算模板和源图像之间的复相关系数,并找出最大复相关系数的位置。
6. **cv2.TM_CCOEFF_NORMED**:这种方法类似于上面的方法,但它归一化了复相关系数的结果。
以下是一个使用cv2.TM_CCORR_NORMED方法进行模板匹配的Python示例:```pythonimport cv2import numpy as np# 加载源图像和模板图像src_image = cv2.imread('source_image.png', cv2.IMREAD_GRAYSCALE) # 源图像template = cv2.imread('template.png', cv2.IMREAD_GRAYSCALE) # 模板图像# 获取模板图像的尺寸w, h = template.shape[::-1]# 应用模板匹配res = cv2.matchTemplate(src_image, template, cv2.TM_CCORR_NORMED)# 设置阈值threshold = 0.8# 找到匹配区域loc = np.where(res >= threshold)# 使用矩形框标记匹配区域for pt in zip(*loc[::-1]):cv2.rectangle(src_image, pt, (pt[0] + w, pt[1] + h), (0, 0, 255), 2)# 显示结果图像cv2.imshow('Detected', src_image)cv2.waitKey(0)cv2.destroyAllWindows()```在这个示例中,我们首先加载了源图像和模板图像。
c语言正则表达式选择匹配空格

c语言正则表达式选择匹配空格在程序设计中,使用正则表达式能够大大提高代码的可维护性和可重用性。
正则表达式常常被用于匹配符合特定规则的字符串,其中一个常见的需求是选择匹配空格。
正则表达式(Regular Expression,简称“regex”)指的是按照特定的语法规则定义的匹配表达式。
在C语言中,我们使用regex.h 头文件提供的正则表达式库来实现对正则表达式的支持。
在C语言中,使用正则表达式选择匹配空格通常有两个步骤:1.编写匹配空格的正则表达式2.调用正则表达式库中的函数进行匹配下面我们将详细介绍如何实现这两步骤。
1.编写匹配空格的正则表达式在正则表达式中,空格是一个特殊字符,需要用特定的语法规则来表示。
常用的匹配空格的正则表达式有两种:使用空格字符和使用转义字符。
使用空格字符使用空格字符表示匹配任意一个空格,可以使用正则表达式“ ”,其中空格字符包括空格(ASCII码32)、制表符(ASCII码9)、回车符(ASCII码13)和换行符(ASCII码10)。
使用转义字符如果需要匹配一个特定ASCII码的空格,可以使用转义字符“\”加上ASCII码对应的十进制或八进制数来表示。
例如,匹配空格的ASCII码是32,可以使用正则表达式“\040”或“\x20”。
2.调用正则表达式库中的函数进行匹配在使用C语言进行正则表达式匹配时,需要使用regex.h头文件提供的函数库。
这个库主要包含两个函数:regcomp()和regexec()。
regcomp()函数此函数用于编译正则表达式,将其转换为特定的内部格式。
它的参数包括一个指向regex_t类型的指针,表示将要生成的正则表达式的内部表示形式,在函数调用结束时会被填充。
也就是说,调用此函数后,就可以使用传递给它的regex_t类型指针进行匹配了。
另外一个参数是一个指向要编译的正则表达式的字符串的指针。
如果编译成功,则该函数返回零。
例如,下面的代码展示了如何使用regcomp()函数将一个空格字符编译为正则表达式:```C#include <regex.h>int main(){regex_t re;char *patt = " ";int ret = regcomp(&re, patt, 0);if (ret != 0) {printf("Compile error!\n");return -1;}// use re for matching}```regexec()函数此函数用于执行正则表达式的匹配。
形状模板匹配原理
形状模板匹配原理形状模板匹配原理,这可真是个有趣又有点复杂的事儿呢。
咱们先来说说形状模板匹配到底是个啥吧。
其实呢,就像是我们找东西一样,在一堆形状里找到和我们那个模板形状一样或者最接近的。
比如说,你有一个圆形的模板,然后在一堆奇奇怪怪的形状里,要把那个圆形找出来。
这就像是在玩一个特别的寻宝游戏,宝藏就是那个和模板匹配的形状。
那这个原理在实际生活中有啥用呢?嘿,用处可大了去了。
像在一些图像识别的软件里,就会用到这个。
比如说你用手机拍一张照片,里面有很多东西,软件想要知道照片里有没有圆形的物体,像盘子啊、硬币啊之类的,就会用到形状模板匹配原理。
它就像一个超级聪明的小侦探,在照片这个大案子里,找出符合圆形模板的“嫌疑物”。
再讲讲它在工业上的应用吧。
在生产线上,可能有很多零部件,形状各异。
如果要检测某个特定形状的零部件有没有生产合格,形状模板匹配就可以派上用场啦。
就好像给每个零部件都安排了一场考试,那个形状模板就是标准答案,只有和它匹配的才是合格的产品呢。
从技术的角度来看,形状模板匹配原理涉及到很多数学知识哦。
比如说要计算形状之间的距离,这个距离可不是我们平常说的直线距离,而是一种特殊的、用来衡量形状相似程度的距离。
有点像我们判断两个人长得像不像,要从五官的比例啊、脸型啊等好多方面来综合判断一样。
而且呢,形状模板匹配还和计算机算法有关。
不同的算法就像是不同的解题思路。
有的算法可能计算速度快,但是准确性可能稍微差一点;有的算法呢,准确性很高,但是可能会比较耗时。
就像我们做数学题,有的方法简单但是可能会有一点小误差,有的方法很精确但是步骤很繁琐。
在研究形状模板匹配原理的时候,我还发现了一个很有趣的现象。
有时候,我们眼睛看到的形状匹配和计算机计算出来的结果可能会不一样呢。
我们的眼睛可能会受到一些视觉错觉的影响,但是计算机是按照严格的算法来计算的。
这就好比我们看魔术表演的时候,眼睛看到的和实际发生的可能不一样,而计算机可不会被这种魔术骗到哦。
elasticsearch template详解
elasticsearch template详解Elasticsearch模板是一种用于定义索引的结构和映射的模板。
它允许您在创建索引时自动应用预定义的设置和映射规则,以确保索引的一致性和正确性。
以下是关于Elasticsearch模板的详细解释:1. 模板定义:模板是一个包含在Elasticsearch中的JSON文件,它定义了索引的结构和映射规则。
模板可以包含多个索引模式,每个模式定义了一个或多个索引的设置和映射规则。
2. 模板匹配规则:模板可以使用通配符来匹配索引名称,以便将模板应用于特定的索引或一组索引。
例如,可以使用通配符"logs-*"将模板应用于以"logs-"开头的所有索引。
3. 索引设置:模板可以定义索引的各种设置,例如分片数量、副本数量、分析器、过滤器等。
这些设置将在创建索引时自动应用。
4. 映射规则:模板可以定义索引中字段的映射规则。
映射规则定义了字段的数据类型、分析器、索引方式等。
通过定义映射规则,可以确保索引中的字段具有一致的数据类型和分析方式。
5. 动态映射:模板还可以定义动态映射规则,以便在索引中自动创建字段。
当索引中的文档包含未定义的字段时,动态映射规则将自动创建新字段并为其分配适当的映射规则。
6. 模板优先级:如果存在多个匹配的模板,Elasticsearch将根据模板的优先级来确定应用的顺序。
模板的优先级由其定义的顺序决定,后定义的模板将具有更高的优先级。
7. 模板更新:一旦创建了模板,您可以通过更新模板的方式来修改索引的结构和映射规则。
更新模板将自动应用于新创建的索引,但不会影响已经存在的索引。
总之,Elasticsearch模板是一种强大的工具,可以帮助您自动化索引的创建和管理。
通过定义模板,您可以确保索引的一致性和正确性,并减少手动设置和映射的工作量。
模板匹配的步骤
模板匹配的步骤
模板匹配是一种在图像中寻找与给定模板最相似的区域的方法,常用于对象检测、图像识别等领域。
以下是模板匹配的基本步骤:
1. 准备模板:首先,需要一个已知的模板图像,它代表了我们希望在目标图像中找到的对象。
2. 读取目标图像:然后,我们需要一个目标图像,这是我们将在其中寻找模板的图像。
3. 模板匹配:使用模板匹配算法,将模板图像与目标图像中的每一个可能的位置进行比较,以确定它们之间的相似度。
4. 找出最佳匹配位置:根据比较结果,找出模板图像与目标图像中最相似的位置,这个位置就是模板在目标图像中的最佳匹配位置。
5. 标记或提取匹配区域:最后,可以在目标图像中标记出最佳匹配位置,或者直接提取出这个区域。
以上就是模板匹配的基本步骤,具体实现时可能会有所不同,例如使用的模板匹配算法、如何处理图像等都会影响到最终的结果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
C++类模板的匹配规则
程序运行结果:
代码如下:
#include<iostream>
using namespace std;
template<class T,class U>//带有两个模板参数的类模板声明
class CTest
{
public:
void f()
{
cout<<"主模板"<<endl;
}
};
template<class U>//强调第一个模板参数是int类型的偏特化类型
class CTest<int,U>
{
public:
void f()
{
cout<<"T等于int"<<endl;
}
};
template<class T>//强调第二个模板参数是double类型的偏特化类型
class CTest<T,double>
{
public:
void f()
{
cout<<"U等于double"<<endl;
}
};
template<class T,class U>//强调第一个模板参数是指针类型的偏特化类型class CTest<T*,U>
{
public:
void f()
{
cout<<"使用了T*"<<endl;
}
};
template<class T,class U>//强调第二个模板参数是指针类型的偏特化类型
class CTest<T,U*>
{
public:
void f()
{
cout<<"使用了U*"<<endl;
}
};
template<class T,class U>//强调两个模板参数是指针类型的偏特化类型
class CTest<T*,U*>
{
public:
void f()
{
cout<<"使用了T*和U*"<<endl;
}
};
template<class T>//强调两个模板参数类型相同的偏特化类型
class CTest<T,T>
{
public:
void f()
{
cout<<"T等于U"<<endl;
}
};
int main()
{
//类模板的匹配规则遵循“特化程度最高”的模板。
具体说,模板参数最准确匹配的拥有最高的实例化优先权
CTest<float,int>ct1;
ct1.f();//主模板
CTest<int,float>ct2;
ct2.f();//T等于int
CTest<float,double>ct3;
ct3.f();//U等于double
CTest<float,float>ct4;
ct4.f();//T等于U
CTest<float*,float>ct5;
ct5.f();//使用了T*
CTest<float,float*>ct6;
ct6.f();//使用了U*
CTest<float*,int*>ct7;
ct7.f();//使用了T*和U* }。