4四相五线减速步进电机28BYJ48原理仿真及演示程序使用ULN2019A驱动-4页文档资料
n驱动器驱动四相五线制步进电机28byj-48-5v接线说明
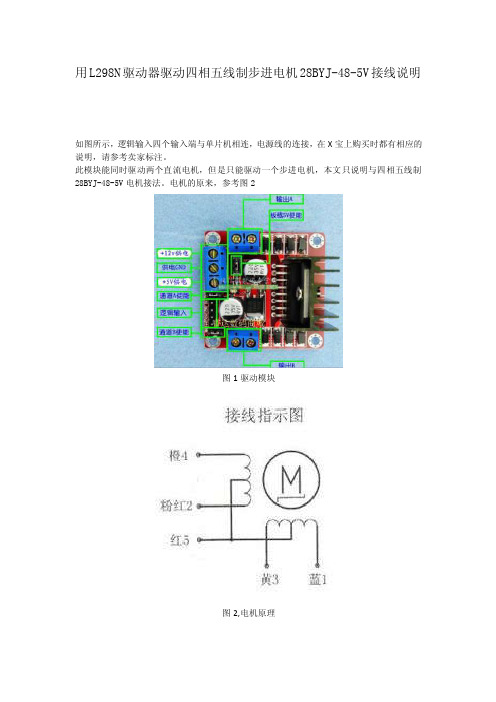
用L298N驱动器驱动四相五线制步进电机28BYJ-48-5V接线说明
如图所示,逻辑输入四个输入端与单片机相连,电源线的连接,在X宝上购买时都有相应的说明,请参考卖家标注。
此模块能同时驱动两个直流电机,但是只能驱动一个步进电机,本文只说明与四相五线制28BYJ-48-5V电机接法。
电机的原来,参考图2
图1驱动模块
图2,电机原理
通过图2电机原理的说明,我们可以进行连线,,如图所示。
找到对应的电机四相的关系,电机的四线(公共端除外)分别接到L298N模块的OUT1 ,OUT2和OUT3,OUT4输出端,其中公共端线接到5V电源。
因为本步进电机的额定电压为5V,所以从单片机引出5V电压接到驱动模块的12V输入口,5V输入口不接电源
如图所示进行连线,此时电机可能出现振动情况,但是不运转,或者只运转一个角度,此时,拔去四个输入口旁边的使能通道EB的跳线帽(或者EA),此时电机正常运转。
(整理)易寒电子步进电机_28BYJ-48介绍
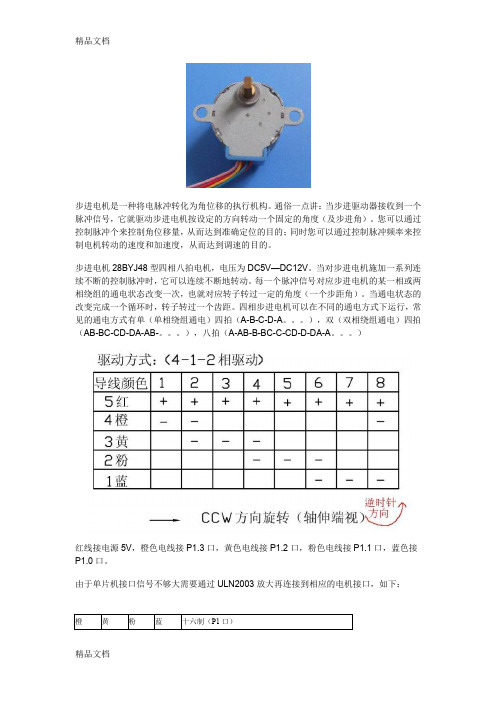
红线接电源5V,橙色电线接P1.3口,黄色电线接P1.2口,粉色电线接P1.1口,蓝色接P1.0口。
{uchar bb;while(aa--){for(bb=0;bb<115;bb++) //1ms基准延时程序{;}}}void delay500us(void){int j;for(j=0;j<57;j++){;}}void beep(void){uchar t;for(t=0;t<100;t++){delay500us();FMQ=!FMQ; //产生脉冲}FMQ=1; //关闭蜂鸣器}void motor_ccw(void){uchar i,j;for(j=0;j<8;j++) //电机旋转一周,不是外面所看到的一周,是里面的传动轮转了一周{if(K3==0){break; //如果K3按下,退出此循环}for(i=0;i<8;i++) //旋转45度{P1=CCW[i];delaynms(10); //调节转速}}}void motor_cw(void){uchar i,j;for(j=0;j<8;j++){if(K3==0){break; //如果K3按下,退出此循环}for(i=0;i<8;i++) //旋转45度{P1=CW[i];delaynms(2); //调节转速}}}void main(void){uchar r;uchar N=64; //因为步进电机是减速步进电机,减速比的1/64 ,//所以N=64时,步进电机主轴转一圈while(1){if(K1==0){beep();for(r=0;r<N;r++){motor_ccw(); //电机逆转if(K3==0){beep();break;}}}else if(K2==0){beep();for(r=0;r<N;r++){motor_cw(); //电机反转if(K3==0){beep();break;}}}elseP1=0xf0; //电机停止}}附:步进电机小知识(转)1.什么是步进电机?步进电机是一种将电脉冲转化为角位移的执行机构。
【免费下载】28BYJ48型步进电机的控制方法
} }
//**********************步进电机正转 ****************************** void motor_ffw(unsigned int n) {
unsigned char i; unsigned int j; for (j=0; j<8*64*n; j++) {
******************************
//* 描述: 28BYJ-48 步进电机正反转控制
//* 电机使用端口:
P1.0、P1.1、P1.2、B-B-BC-C-CD-D-
DA
*
*
对全部高中资料试卷电气设备,在安装过程中以及安装结束后进行高中资料试卷调整试验;通电检查所有设备高中资料电试力卷保相护互装作置用调与试相技互术关,系电,力根通保据过护生管高产线中工敷资艺设料高技试中术卷资,配料不置试仅技卷可术要以是求解指,决机对吊组电顶在气层进设配行备置继进不电行规保空范护载高与中带资负料荷试下卷高问总中题体资,配料而置试且时卷可,调保需控障要试各在验类最;管大对路限设习度备题内进到来行位确调。保整在机使管组其路高在敷中正设资常过料工程试况中卷下,安与要全过加,度强并工看且作护尽下关可都于能可管地以路缩正高小常中故工资障作料高;试中对卷资于连料继接试电管卷保口破护处坏进理范行高围整中,核资或对料者定试对值卷某,弯些审扁异核度常与固高校定中对盒资图位料纸置试,.卷保编工护写况层复进防杂行腐设自跨备动接与处地装理线置,弯高尤曲中其半资要径料避标试免高卷错等调误,试高要方中求案资技,料术编试交写5、卷底重电保。要气护管设设装线备备置敷4高、调动设中电试作技资气高,术料课中并3中试、件资且包卷管中料拒含试路调试绝线验敷试卷动槽方设技作、案技术,管以术来架及避等系免多统不项启必方动要式方高,案中为;资解对料决整试高套卷中启突语动然文过停电程机气中。课高因件中此中资,管料电壁试力薄卷高、电中接气资口设料不备试严进卷等行保问调护题试装,工置合作调理并试利且技用进术管行,线过要敷关求设运电技行力术高保。中护线资装缆料置敷试做设卷到原技准则术确:指灵在导活分。。线对对盒于于处调差,试动当过保不程护同中装电高置压中高回资中路料资交试料叉卷试时技卷,术调应问试采题技用,术金作是属为指隔调发板试电进人机行员一隔,变开需压处要器理在组;事在同前发一掌生线握内槽图部内 纸故,资障强料时电、,回设需路备要须制进同造行时厂外切家部断出电习具源题高高电中中源资资,料料线试试缆卷卷敷试切设验除完报从毕告而,与采要相用进关高行技中检术资查资料和料试检,卷测并主处且要理了保。解护现装场置设。备高中资料试卷布置情况与有关高中资料试卷电气系统接线等情况,然后根据规范与规程规定,制定设备调试高中资料试卷方案。
51单片机驱动步进电机28BYJ-48

转载51单⽚机驱动步进电机28BYJ-4851单⽚机驱动步进电机 28BYJ-48步进电机 28BYJ-48介绍和驱动及编程28BYJ-48步进电机:步进电机是⼀种将电脉冲转化为⾓位移的执⾏机构。
通俗⼀点讲:当步进驱动器接收到⼀个脉冲信号,它就驱动步进电机按设定的⽅向转动⼀个固定的⾓度(及步进⾓)。
您可以通过控制脉冲个来控制⾓位移量,从⽽达到准确定位的⽬的;同时您可以通过控制脉冲频率来控制电机转动的速度和加速度,从⽽达到调速的⽬的。
步进电机28BYJ48型四相⼋拍电机,电压为DC5V—DC12V 。
当对步进电机施加⼀系列连续不断的控制脉冲时,它可以连续不断地转动。
每⼀个脉冲信号对应步进电机的某⼀相或两相绕组的通电状态改变⼀次,也就对应转⼦转过⼀定的⾓度(⼀个步距⾓)。
当通电状态的改变完成⼀个循环时,转⼦转过⼀个齿距。
四相步进电机可以在不同的通电⽅式下运⾏,常见的通电⽅式有单(单相绕组通电)四拍(A-B-C-D-A 。
),双(双相绕组通电)四拍(AB-BC-CD-DA-AB-。
),⼋拍(A-AB-B-BC-C-CD-D-DA-A 。
)红线接电源5V ,橙⾊电线接P1.3⼝,黄⾊电线接P1.2⼝,粉⾊电线接P1.1⼝,蓝⾊接P1.0⼝。
由于单⽚机接⼝信号不够⼤需要通过ULN2003放⼤再连接到相应的电机接⼝,如下:橙黄 粉蓝⼗六制(P1⼝) 10 0 0 0x08 11 0 0 0x0c 01 0 0 0x04 01 1 0 0x06 00 1 0 0x02 00 1 1 0x03 00 0 1 0x01 10 0 1 0x09顺序刚好相反所以可以定义旋转相序uchar code CCW[8]={0x08,0x0c,0x04,0x06,0x02,0x03,0x01,0x09}; //逆时钟旋转相序表uchar code CW[8]={0x09,0x01,0x03,0x02,0x06,0x04,0x0c,0x08}; //正时钟旋转相序表C 语⾔代码:#include<AT89X52.h> #include<intrins.h> #define uchar unsigned char #define uint unsigned int uchar code CCW[8]={0x08,0x0c,0x04,0x06,0x02,0x03,0x01,0x09}; //逆时钟旋转相序表 uchar code CW[8]={0x09,0x01,0x03,0x02,0x06,0x04,0x0c,0x08}; //正时钟旋转相序表sbit K1=P3^2; //反转按键 sbit K2=P3^3; //正转按键 sbit K3=P3^4; //停⽌按键 sbit FMQ=P3^6; // 蜂鸣器void delaynms(uint aa){ uchar bb; while(aa--) { for(bb=0;bb<115;bb++) //1ms 基准延时程序 { ; } } }void delay500us(void){ int j; for(j=0;j<57;j++) { ; }}void beep(void){ uchart; for(t=0;t<100;t++) { delay500us(); FMQ=!FMQ; //产⽣脉冲 } FMQ=1; //关闭蜂鸣器}void motor_ccw(void){ uchar i,j; for(j=0;j<8;j++) //电机旋转⼀周,不是外⾯所看到的⼀周,是⾥⾯的传动轮转了⼀周 { if(K3==0) { break; //如果K3按下,退出此循环 } for(i=0;i<8;i++) //旋转45度 { P1=CCW[i]; delaynms(10); //调节转速 } }}void motor_cw(void){ uchar i,j; for(j=0;j<8;j++) { if(K3==0) { break; //如果K3按下,退出此循环 } for(i=0;i<8;i++) //旋转45度 { P1=CW[i]; delaynms(2); //调节转速 } }}void main(void){ uchar r; uchar N=64; //因为步进电机是减速步进电机,减速⽐的1/64 , //所以N=64时,步进电机主轴转⼀圈 while(1) { if(K1==0) { beep(); for(r=0;r<N;r++) { motor_ccw(); //电机逆转 if(K3==0) { beep(); break; } } } elseif(K2==0) { beep(); for(r=0;r<N;r++) { motor_cw(); //电机反转 if(K3==0) { beep(); break; } } } else P1=0xf0; //电机停⽌ }}附:步进电机⼩知识(转)1.什么是步进电机?步进电机是⼀种将电脉冲转化为⾓位移的执⾏机构。
28BYJ-48 四相八拍 减速步进电机

C 语言代码:
#include<AT89X52.h> #include<intrins.h> #define uchar unsigned char #define uint unsigned int
uchar code CCW[8]={0x08,0x0c,0x04,0x06,0x02,0x03,0x01,0x09}; //
1/64 ,
//所以 N=64 时,步进电机主轴转一圈
while(1)
{
if(K1==0)
{
beep();
for(r=0;r<N;r++)
{
motor_ccw(); //电机逆转
if(K3==0)
{
beep();
break;
}
}
}
else if(K2==0)
{
beep();
for(r=0;r<N;r++)
7.为什么步进电机的力矩会随转速的升高而下降?
当步进电机转动时,电机各相绕组的电感将形成一个反向电动势;频率越高, 反向电动势越大。在它的作用下,电机随频率(或速度)的增大而相电流减小, 从而导致力矩下降。
8.为什么步进电机低速时可以正常运转,但若高于一定速度就无法启 动,并伴有啸叫声?
步进电机有一个技术参数:空载启动频率,即步进电机在空载情况下能够正 常启动的脉冲频率,如果脉冲频率高于该值,电机不能正常启动,可能发生丢步 或堵转。在有负载的情况下,启动频率应更低。如果要使电机达到高速转动,脉 冲频率应该有加速过程,即启动频率较低,然后按一定加速度升到所希望的高频 (电机转速从低速升到高速)。
4.什么是 DETENT TORQUE?
28BYJ-48 四相八拍 减速步进电机
A.电压的确定
混合式步进电机驱动器的供电电源电压一般是一个较宽的范围(比如 IM483 的供电电压为 12~48VDC),电源电压通常根据电机的工作转速和响应要求来选 择。如果电机工作转速较高或响应要求较快,那么电压取值也高,但注意电源电 压的纹波不能超过驱动器的最大输入电压,否则可能损坏驱动器。
14.如果用简单的方法调整两相步进电机通电后的转动方向?
只需将电机与驱动器接线的 A+和 A-(或者 B+和 B-)对调即可。 四相五线减速步进电机 28BYJ-48 原理、仿真及演示程序(使用 ULN2003A 驱 动) 减速步进电机 28BYJ-48 的原理如下图:
中间部分是转子,由一个永磁体组成,边上的是定子绕组。当定子的一个绕 组通电时,将产生一个方向的电磁场,如果这个磁场的方向和转子磁场方向不在 同一条直线上,那么定子和转子的磁场将产生一个扭力将定子扭转。
逆时钟旋转相序表
uchar code CW[8]={0x09,0x01,0x03,0x02,0x06,0x04,0x0c,0x08};
//
正时钟旋转相序表
sbit K1=P3^2; sbit K2=P3^3; sbit K3=P3^4; sbit FMQ=P3^6;
//反转按键 //正转按键 //停止按键 // 蜂鸣器
if(K3==0) {
break; //如果 K3 按下,退出此循环 } for(i=0;i<8;i++) //旋转 45 度 {
P1=CW[i]; delaynms(2); //调节转速 } } }
void main(void)
{
uchar r;
uchar N=64;
步进电机28BYJ48规格书说明书

规格书SUBMISSION OF SPECIFICATION产品名称(PRODUCT NAME ):步进电机产品型号(PRODUCT MODEL ):28BYJ48客户部品号(CUSTOMER PART NUMBER ):28BYJ48编U .确认记载项目:AFFIRM THE FOLLOWING ITEMS 1、电性能及参数:1、ETECTRIC PERFORMANCE AND PROPERTIES2、机械性能:2、MECHANICAL PERFORMANCE AND PROPERTIES3、环境性能:3、ENVIRONMENTAL PERFORMANCE AND PROPERTIES4、使用寿命试验:4、ENDURANCE TEST5、摩擦耐久试验:5、FRICTION MECHANISM ENDURANCE TEST编制校对审核DRAWN CHECKED APPROVED 产品供货单位(SUPPLIER ):产品用户单位(CUSTMER ):用户确认(ACKNOWLEDGEMENT ):于年月日确认此规格书ACKNOWLEDGEMENT DATE :/MONTH /DAY /YEAR确认人(ACKNOWLEDGED ):盖章(SEALED ):规格书(Specification)编制日期(ISSUE DATE):2011.03.22型号(MODEL)28BYJ48图号(DWG.No.)28BYJ48(1)(2)电性能及参数(ELECTRICAL PERFORMANCE AND PROPERTIES)1-1相数4相Number of phase4phase1-2驱动方式1-2相励磁单极驱动Drive mode1-2phase excitation unipolar drive1-3步距角 5.6250/64(输出轴),减速比1/64Step angle(output shaft) 5.6250/64(output shaft),gear reduction ration1/64 1-4电压5VDC(电机端子)Voltage5VDC(motor energized voltage)1-5线圈电阻50Ω±7%/相25℃Resistance per phase50Ω±7%/phase at25℃1-6最大空载牵出频率>900ppsMax response frequency>900pps1-7最大空载牵入频率>500ppsMax starting frequency>500pps1-8牵入转距>300gf.cm/5VDC100ppsPull in torque>300gf.cm/5VDC100pps1-9绝缘电阻(Insulation resistance)在引接线和外壳之间施加500VDC,测得绝缘电阻大于10MΩ。
28BYJ-48四相步进电机手动调速 (单步+加减速)

}
//------------------------------串口发送----------------------------------------
void usart_char_send(uchar data)
{
while(!(UCSRA&(1<<UDRE)));
UDR=data;
}
//---------------------main函数----------------------
int main()
{
usart_init();
//----------------------IO口初始化----------------------
void PORT_INIT()
{
PORTA=0x00;//所有口初始化为上拉输入
DDRA=0xFF;
PORTB=0x00;
DDRB=0xFF;
PORTC=0x00;
DDRC=0xFF;
cli();//关全局中断
timer0_init();
sei();//开全局中断
PORT_INIT();
PORTB=0x00;
DDRB=0xFF;
PORTD=0xFF;
DDRD=0xFF;
// uchar i=0;
while(1)
{
//usart_char_send(0x88);
28BYJ48电机详细使用说明

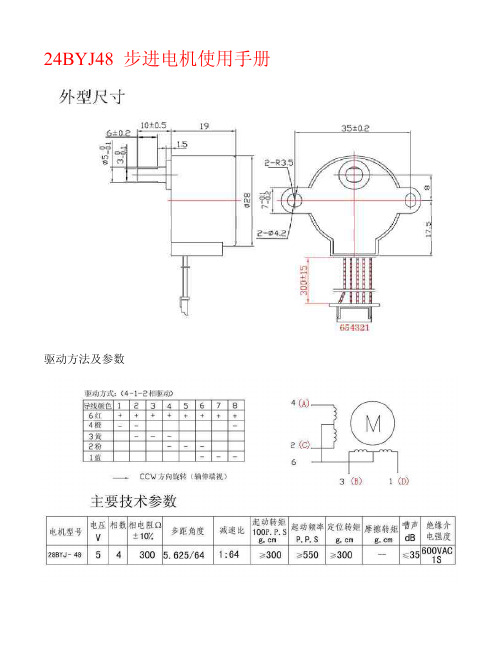
24BYJ48 步进电机使用手册驱动方法及参数插入到开发板的方法:直接插入到LCD12864 位置一、前言:步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。
使得在速度、位置等控制领域用步进电机来控制变的非常的简单。
为此,黑金刚开发板套件中首次引入了步进电机技术,采用扩展的方式,方便用户应用掌握。
虽然步进电机已被广泛地应用,但步进电机并不能象普通的直流电机,交流电机在常规下使用。
它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。
因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。
步进电机的主要特性:1、步进电机必须加驱动才可以运转,驱动信号必须为脉冲信号,没有脉冲的时候,步进电机静止,如果加入适当的脉冲信号,就会以一定的角度(称为步角)转动。
转动的速度和脉冲的频率成正比。
2、黑金刚配套的是28BYJ48 5V 驱动的4 相5 线的步进电机,而且是减速步进电机,减速比为1:64,步进角为5.625/64度。
如果需要转动 1 圈,那么需要360/5.625*64=4096个脉冲信号。
3、步进电机具有瞬间启动和急速停止的优越特性。
4、改变脉冲的顺序,可以方便的改变转动的方向。
因此,目前打印机,绘图仪,机器人,等等设备都以步进电机为动力核心。
二、配套的原理图及程序:1、如果不考虑数据锁存功能,步进电机的扩展板电路可以简化为下图:2、黑金刚套件采用的是5V 步进电机,该步进电机的耗电流为200m a左右,采用uln2003 驱动,驱动端口为P0.0(A),P0.1(B),P0.2(C),P0.3(C)。
正转次序: AB 组--BC 组--CD 组--DA 组(即一个脉冲,正转5.625度);反转次序:AB组--AD组--CD组--CB组(即一个脉冲,正转5.625 度),如下表:表1:正转表表2:反转表3ASM 驱动程序:;*** ****步进电机的驱动********;F O S C = 12M H z;---------------------------------------------------------------------------------; 步进电机的驱动信号必须为脉冲信号!!!转动的速度和脉冲的频率成正比!!!; 本步进电机步进角为5.625 度. 一圈360 度, 需要64 个脉冲完成!!!;---------------------------------------------------------------------------------; A 组线圈对应P0.0; B 组线圈对应P0.1; C 组线圈对应P0.2; D 组线圈对应P0.3; 正转次序:AB 组--BC组--CD组--DA组(即一个脉冲,正转5.625 度);----------------------------------------------------------------------------------ORG 0000HL J M P M A I NORG 0100HM A I N:;----------------------------正转--------------------------M OV R3,#192 ;正转3 圈共192 个脉冲S T A R T:M OV R0,#00HS T A R T1:M OV P0,#00HM OV A,R0M OV D P T R,#T A B LEM OV C A,@A+D P TRJ Z START ;对A 的判断,当A=0 时则转到S T A RTM OV P0,AL C A LL D EL AYI N C R0D J N Z R3,S T A R T1M OV P0,#00HLCALL D EL AY1;-----------------------------反转------------------------M OV R3,#128 ;反转2 圈共128 个脉冲S T A R T2:M OV P0,#00HM OV R0,#05S T A R T3:M OV A,R0M OV D P T R,#T A B LEM OV C A,@A+D P TRJ Z S T A R T2M OV P0,ACALL D EL AYI N C R0D J N Z R3,S T A R T3M OV P0,#00HLCALL D EL AY1L J M P M A I N;---------------------------转速控制-----------------------D EL AY:M OV R7,#10 ;步进电机的转速M3:M OV R6,#248D J N ZR6,$D J N Z R7,M3RET;---------------------------延时控制----------------------D EL AY1:M OV R4,#5 ;2S延时子程序D EL2:M OV R3,#200D EL3:M OV R2,#250D J N ZR2,$ D JN Z R3,D E L3D J N Z R4,DE L2RET;---------------------------正反转表----------------------T A B L E:DB 03H,06H,0C H,09H;正转表DB 00;正转结束DB 03H,09H,0C H,06H;反转表DB 00;反转结束E ND4、C语言驱动程序:/******************************步进电机的驱动************************************* ;F O S C = 12M H z;---------------------------------------------------------------------------------; 步进电机的驱动信号必须为脉冲信号!!!转动的速度和脉冲的频率成正比!!!; 本步进电机步进角为5.625 度. 一圈360 度, 需要64 个脉冲完成!!!;---------------------------------------------------------------------------------; A 组线圈对应P0.0; B 组线圈对应P0.1; C 组线圈对应P0.2; D 组线圈对应P0.3; 正转次序:AB 组--BC组--CD组--DA组(即一个脉冲,正转5.625 度);----------------------------------------------------------------------------------**********************************************************************************/ /*头文件*/#i n c l ud e<r e g52.h>#i n c l ud e<i n t r i n s.h>#d e f i n e u i n t un s i gn e d i n t#d e f i n e u c h a r un s i gn e d c h a r#d e f i n e nop() _nop_()u c h a r code t a b l e1[]={0x03,0x06,0x0c,0x09};/*正转表*/u c h a r code t a b l e2[]={0x03,0x09,0x0c,0x06};/*反转表*/#d e f i n e m o t o r P0vo i d d e l a y(u c h a r m s)/*延时*/{u c h a r j;w h il e(m s--){f o r(j=0;j<250;j++){;}}}vo i d m a i n(){u c h a r i,j;w h il e(1){//正转3 圈共192 个脉冲j=0;f o r(i=0;i<192;i++){m o t o r = 0x00;m o t o r = t a b l e1[j];j++;i f(j>=4)j=0;d e l a y(2);}d e l a y(200);d e l a y(200);d e l a y(200);d e l a y(200);d e l a y(200);//正转2 圈共128 个脉冲j=0;f o r(i=0;i<128;i++){m o t o r = 0x00;m o t o r = t a b l e2[j];j++;i f(j>=4)j=0;d e l a y(2);}d e l a y(200);d e l a y(200);d e l a y(200);d e l a y(200);d e l a y(200);}}。
28BYJ48电机详细使用说明
: 序程动驱言语 C、4
DNE 束结转反 ;00 BD 表转反 ;H60,HC0,H90,H30 BD 束结转正 ;00 BD 表转正 ;H90,HC0,H60,H30 BD :ELBAT ----------------------表转反正---------------------------; TER ZNJD 2LED,4R
0 0 1 1 )B( 1.0P
1 0 0 1 )A(0.0P
4 3 2 1 数步
9 0x 0 C0x0 6 0x 0 3 0x 0 值口 端 表转正�1 表
�表下如,)度 526.5 转正,冲 脉个一即( 组 BC--组 DC--组 DA-- 组 BA�序次转 反�)度 526.5 转正,冲脉个 一即( 组 AD-- 组 DC-- 组 CB-- 组 BA :序次转正。)C(3.0P,)C(2.0P,)B(1.0P,�A �0.0P 为口 端动驱�动驱 3002nlu 用采 �右左 am002 为流电 耗的机电进步 该� 机电进步 V5 是的 用采件套刚金 黑、2
3LED,3R ZNJD $,2R ZNJD 052#,2R VOM :3LED 002#,3R VOM :2LED 序程子时延 S2; 5#,4R VOM :1YALED ----------------------制控时延---------------------------; TER 3M,7R ZNJD $,6R ZNJD 842#,6R VOM :3M 速转的机电进步; 01#,7R VOM :YALED -----------------------制控速转---------------------------; NIAM PMJL 1YALED LLACL H00#,0P VOM 3TRATS,3R ZNJD 0R CNI YALED LLAC A,0P VOM 2TRATS ZJ RTPD+A@,A CVOM ELBAT#,RTPD VOM 0R,A VOM :3TRATS 50#,0R VOM H00#,0P VOM :2TRATS 冲脉个 8 21 共圈 2 转反; 821#,3R VOM ------------------------转反-----------------------------; 1YALED LLACL H00#,0P VOM 1TRATS,3R ZNJD 0R CNI YALED LLACL A,0P VOM TRATS 到转则时 0=A 当,断判的 A 对 ; TRATS ZJ RTPD+A@,A CVOM ELBAT#,RTPD VOM 0R,A VOM H00#,0P VOM :1TRATS H00#,0R VOM :TRATS 冲脉个 2 91 共圈 3 转正; 291#,3R VOM --------------------------转正 ----------------------------; :NIAM H0010 GRO NIAM PMJL H0000 GRO
28byj-48步进电机的工作原理

28byj-48步进电机的工作原理
28BYJ-48步进电机是一种直流电机,它的工作原理基于脉冲信号控制。
它包含四个线圈,每个线圈在不同时刻被激活或取消激活,从而使电机的转子按照一定的步长旋转。
具体来说,当一个线圈被通电时,它会产生一个磁场,将电机中的永磁体吸引到该线圈的位置。
当这个线圈被取消通电时,它的磁场消失,永磁体就会被另一个线圈的磁场吸引到下一个步骤的位置。
通过依次激活和取消激活四个线圈,电机就可以以一定的步长旋转。
28BYJ-48步进电机通常使用驱动电路来控制其旋转,这种电路会向电机发送脉冲信号,每个脉冲信号都会让电机旋转一个固定的步长。
通过改变脉冲信号的频率和方向,可以实现对电机旋转的控制。
工程施工质量验收的行为和标准,提高施工质量和建筑工程的安全性、可靠性和持久性,保障人民群众的生命财产安全。
同时,该标准也有利于推动建筑行业的现代化和标准化,促进建筑工程质量管理的科学化和规范化。
28BYJ-48步进电机简介
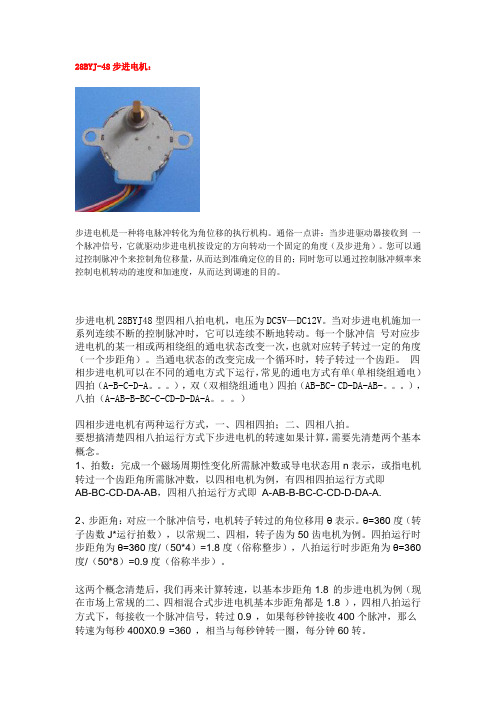
28BYJ-48步进电机:步进电机是一种将电脉冲转化为角位移的执行机构。
通俗一点讲:当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(及步进角)。
您可以通过控制脉冲个来控制角位移量,从而达到准确定位的目的;同时您可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
步进电机28BYJ48型四相八拍电机,电压为DC5V—DC12V。
当对步进电机施加一系列连续不断的控制脉冲时,它可以连续不断地转动。
每一个脉冲信号对应步进电机的某一相或两相绕组的通电状态改变一次,也就对应转子转过一定的角度(一个步距角)。
当通电状态的改变完成一个循环时,转子转过一个齿距。
四相步进电机可以在不同的通电方式下运行,常见的通电方式有单(单相绕组通电)四拍(A-B-C-D-A。
),双(双相绕组通电)四拍(AB-BC- CD-DA-AB-。
),八拍(A-AB-B-BC-C-CD-D-DA-A。
)四相步进电机有两种运行方式,一、四相四拍;二、四相八拍。
要想搞清楚四相八拍运行方式下步进电机的转速如果计算,需要先清楚两个基本概念。
1、拍数:完成一个磁场周期性变化所需脉冲数或导电状态用n表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即AB-BC-CD-DA-AB,四相八拍运行方式即A-AB-B-BC-C-CD-D-DA-A.2、步距角:对应一个脉冲信号,电机转子转过的角位移用θ表示。
θ=360度(转子齿数J*运行拍数),以常规二、四相,转子齿为50齿电机为例。
四拍运行时步距角为θ=360度/(50*4)=1.8度(俗称整步),八拍运行时步距角为θ=360度/(50*8)=0.9度(俗称半步)。
这两个概念清楚后,我们再来计算转速,以基本步距角1.8°的步进电机为例(现在市场上常规的二、四相混合式步进电机基本步距角都是1.8°),四相八拍运行方式下,每接收一个脉冲信号,转过0.9°,如果每秒钟接收400个脉冲,那么转速为每秒400X0.9°=360°,相当与每秒钟转一圈,每分钟60转。
28byj48型步进电机的控制方法

28BYJ48型步进电机的控制方法2011-03-13 23:02:00|分类:单片机技术|举报|字号订阅前不久弄到一只28BYJ48型步进电机,没有资料,从网上查找,搜到一些资料,但按照网上介绍的程序实验,都没有成功。
后来根据资料的原理部分,试着自己编写了一段程序,经过多次实验调试,终于成功了。
哈哈,收获不小步进电机是一种将电脉冲转化为角位移的执行设备。
通俗一点讲:当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(即步进角)。
我们可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时我们可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
28BYJ48型步进电机是四相八拍电机,电压为DC5V~DC12V。
当对步进电机按一定顺序施加一系列连续不断的控制脉冲时,它可以连续不断地转动。
每一个脉冲信号使得步进电机的某一相或两相绕组的通电状态改变一次,也就对应转子转过一定的角度。
当通电状态的改变完成一个循环时,转子转过一个齿距。
四相步进电机可以在不同的通电方式下运行,常见的通电方式有单(单相绕组通电)四拍(A-B-C-D-A……),双(双相绕组通电)四拍(AB-BC-CD-DA-AB……),四相八拍(A-AB-B-BC-C-CD-D-DA-A……)。
本例是使用四相八拍驱动方式实现的。
下面是我写的C语言控制程序实现28BYJ48型步进电机正转五圈然后倒转五圈的效果://************************************************* *******************************//*标题:步进电机正反转演示程序 *//*文件:步进电机正反转演示.C *//*日期: 2011-3-13 *//*环境:使用自制单片机最小系统板测试通过 *//************************************************* *******************************//*描述: 28BYJ-48步进电机正反转控制 *//*电机使用端口:P1.0、P1.1、P1.2、P1.3 *//*单双八拍工作方式:A-AB-B-BC-C-CD-D-DA *//************************************************* *******************************#include <reg51.h>#include <intrins.h>//**********************正向旋转相序表*****************************unsigned char codeFFW[8]={0x08,0x0c,0x04,0x06,0x02,0x03,0x01,0x09}; //**********************反向旋转相序表*****************************unsigned char codeREV[8]={0x09,0x01,0x03,0x02,0x06,0x04,0x0c,0x08}; //***********************延时子程序********************************void delay(unsigned int t){unsigned int k;while(t--){for(k=0; k<125; k++){}}}//**********************步进电机正转******************************void motor_ffw(unsigned int n) {unsigned char i;unsigned int j;for (j=0; j<8*64*n; j++){for (i=0; i<8; i++){P1 = FFW[i];delay(1);}}}//*********************步进电机反转******************************** void motor_rev(unsigned int n) {unsigned char i;unsigned int j;for (j=0; j<8*64*n; j++){for (i=0; i<8; i++){P1 = REV[i];delay(1);}}}//*************************主程序********************************* main(){while(1){motor_ffw(5); //电机正转5圈delay(1000);motor_rev(5); //电机反转5圈delay(1000);}}下面是赠送的几篇网络励志文章需要的便宜可以好好阅读下,不需要的朋友可以下载后编辑删除!!谢谢!!出路出路,走出去才有路“出路出路,走出去才有路。
28BYJ-48步进电机驱动程序
/******************************28BYJ-48步进电机测试程序*************************************;FOSC = 12MHz; 步进电机的驱动信号必须为脉冲信号转动的速度和脉冲的频率成正比; 本步进电机步进角为 5.625 半步5.625/2度,减速比为32. 一圈 360 度 , 需要512 个脉冲完成 360=N*22.5/32;---------------------------------------------------------------------------------; A 组线圈对应 P2.0; B 组线圈对应 P2.1; C 组线圈对应 P2.2; D 组线圈对应 P2.3;----------------------------------------------------------------------------------********************************************************************* *************/#include <reg52.h>#include <lm1602.h>#define uint unsigned int#define uchar unsigned charuint i,j,k ;uint N=512;uchar code single_pos[4]={0x08,0x04,0x02,0x01}; /*单四拍正转表*/uchar code single_rev[4]={0x01,0x02,0x04,0x08}; /*单四拍反转表*/uchar code double_pos[4]={0x06,0x03,0x09,0x0c}; /*双四拍反转表*/uchar code double_rev[4]={0x0c,0x09,0x03,0x06}; /*双四拍反转表*/uchar code eight_pos[8]={0x06,0x07,0x03,0x0b,0x09,0x0d,0x0c,0x0e}; /*八拍驱动正转*/uchar code eight_rev[8]={0x0e,0x0c,0x0d,0x09,0x0b,0x03,0x07,0x06}; /*八拍驱动正转*/void delay(uint z);void m_single_pos();void m_single_rev();void m_double_pos();void m_double_rev();void m_eight_pos();void m_eight_rev();void main(){while(1){m_single_pos(); //单四拍正转360度delay(200);m_single_rev(); //单四拍反转360度delay(200);m_double_pos(); //双四拍正转360度delay(200);m_double_rev(); //双四拍反转360度delay(200);m_eight_pos(); //八拍驱动正转360度delay(200);m_eight_rev(); //八拍驱动反转360度delay(200);}}void delay(uint z) /*延时z毫秒*/{uint x,y;for(x=z;x>0;x--)for(y=110;y>0;y--) ;}/******************************单四拍驱动正转(N*22.5/32)*************************************/void m_single_pos(){for(k=0;k<N;k++){for(i=0;i<4;i++) //单四拍一个脉冲转子转动5.625度,四拍共22.5度{P2=single_pos[i] ;delay(5) ; //适当延时,保证转子转动时间,延时过短会丢拍}}}/******************************单四拍驱动反转(N*22.5/32)*************************************/void m_single_rev(){for(k=0;k<N;k++){for(i=0;i<4;i++) //单四拍一个脉冲转子转动5.625度,四拍共22.5度{P2=single_rev[i] ;delay(5) ;}}}/******************************双四拍驱动正转(N*22.5/32)*************************************/void m_double_pos(){for(k=0;k<N;k++){for(i=0;i<4;i++) //双四拍一个脉冲转子转动5.625度,四拍共22.5度,力矩较单四拍更大{P2=double_pos[i] ;delay(5) ;}}}/******************************双四拍驱动反转(N*22.5/32)*************************************/void m_double_rev(){for(k=0;k<N;k++){for(i=0;i<4;i++) //双四拍一个脉冲转子转动5.625度,四拍共22.5度力矩较单四拍更大{P2=double_rev[i] ;delay(5) ;}}}/******************************八拍驱动正转(N*22.5/32)*************************************/void m_eight_pos(){for(k=0;k<N;k++){for(i=0;i<8;i++) //八拍一个脉冲转子转动5.625/2度,八拍共22.5度{P2=eight_pos[i] ;delay(5) ;}}}/******************************八拍驱动反转(N*22.5/32)*************************************/void m_eight_rev(){for(k=0;k<N;k++){for(i=0;i<8;i++) //八拍一个脉冲转子转动5.625/2度,八拍共22.5度{P2=eight_rev[i] ;delay(5) ;}}}。
28BYJ-48 四相八拍 减速步进电机
步进电机低速转动时振动和噪声大是其固有的缺点,一般可采用以下方案来克服:
A.如步进电机正好工作在共振区,可通过改变减速比等机械传动避开共振区; B.采用带有细分功能的驱动器,这是最常用的、最简便的方法; C.换成步距角更小的步进电机,如三相或五相步进电机; D.换成交流伺服电机,几乎可以完全克服震动和噪声,但成本较高; E.在电机轴上加磁性阻尼器,市场上已有这种产品,但机械结构改变较大。
10.细分驱动器的细分数是否能代表精度?
步进电机的细分技术实质上是一种电子阻尼技术(请参考有关文献),其主 要目的是减弱或消除步进电机的低频振动,提高电机的运转精度只是细分技术的 一个附带功能。比如对于步进角为 1.8°的两相混合式步进电机,如果细分驱动
器的细分数设置为 4,那么电机的运转分辨率为每个脉冲 0.45°,电机的精度能 否达到或接近 0.45°,还取决于细分驱动器的细分电流控制精度等其它因素。 不同厂家的细分驱动器精度可能差别很大;细分数越大精度越难控制。
void delaynms(uint aa) {
uchar bb; while(aa--) {
for(bb=0;bb<115;bb++) {
; } }
//1ms 基准延时程序
}
void delay500us(void) {
int j; for(j=0;j<57;j++) {
; } }
void beep(void)
1/64 ,
//所以 N=64 时,步进电机主轴转一圈
while(1)
{
if(K1==0)
{
beep();
for(r=0;r<N;r++)
步进电机28BYJ(个人总结版)资料
步进电机28BYJ-48介绍和驱动电路及程序28BYJ-5V步进电机简介步进电机是一种将电脉冲转化为角位移的执行机构。
通俗一点讲:当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(及步进角)。
您可以通过控制脉冲个来控制角位移量,从而达到准确定位的目的;同时您可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
当对步进电机施加一系列连续不断的控制脉冲时,它可以连续不断地转动。
每一个脉冲信号对应步进电机的某一相或两相绕组的通电状态改变一次,也就对应转子转过一定的角度(一个步距角)。
当通电状态的改变完成一个循环时,转子转过一个齿距。
四相步进电机可以在不同的通电方式下运行,常见的通电方式有单(单相绕组通电)四拍(A-B-C-D-A。
),双(双相绕组通电)四拍(AB-BC-CD-DA-AB-。
),八拍(A-AB-B-BC-C-CD-D-DA-A。
)。
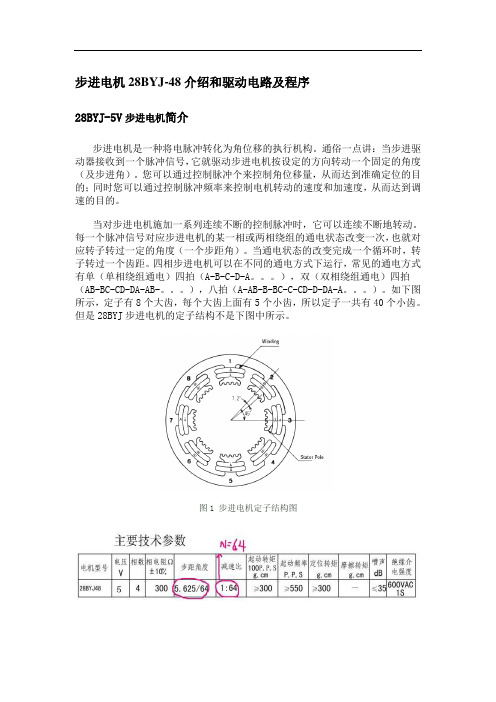
如下图所示,定子有8个大齿,每个大齿上面有5个小齿,所以定子一共有40个小齿。
但是28BYJ步进电机的定子结构不是下图中所示。
图1 步进电机定子结构图1个人理解一下为作者自己通过查找资料和实验验证得到的结论,难免有所纰漏,请见谅与指正。
——by Arron Chen, in HUST, 2014/3/61.128BYJ-5V步进电机内部结构图图1.1 将要拆开的28BYJ-5V打开上盖后的减速齿轮:图1.2 减速齿轮和前盖图1.3 定子绕组图1.4转子(左)和后盖(右)1.2转子转动原理将电机拆开可见,定子分两层,每层绕有绕向相反的两组铜线,上面一层两根线分别对应四相中的A、C(因C相线圈与A同层反向,故又称C为A);下面一层分别对应四相中的B、D(因D相线圈与B同层反向,故又称D为B)。
每层线圈被上下两个铁片夹在中间,每个铁片上有均匀分布的8个垂直于铁片平面的齿,并插入线圈轴中,并且两个铁片对应的8个齿相互交错,将圆周均分为16等份,并且上下两层的16个齿也是相互交错的,于是两层所有共32个齿将圆周均分为32等份,从轴向看就是有32个均匀分布的齿,并且任意相邻的两个齿是分属于上下不同层次的线圈轴中。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
减速步进电机28BYJ-48的原理如下图:中间部分是转子,由一个永磁体组成,边上的是定子绕组。
当定子的一个绕组通电时,将产生一个方向的电磁场,如果这个磁场的方向和转子磁场方向不在同一条直线上,那么定子和转子的磁场将产生一个扭力将定子扭转。
依次改变绕组的磁场,就可以使步进电机正转或反转(比如通电次序为
A->B->C->D正转,反之则反转)。
而改变磁场切换的时间间隔,就可以控制步进电机的速度了,这就是步进电机的驱动原理。
由于步进电机的驱动电流较大,单片机不能直接驱动,一般都是使用
ULN2003达林顿阵列驱动,当然,使用下拉电阻或三极管也是可以驱动的,只不过效果不是那么好,产生的扭力比较小。
参考:减速步进电机28BYJ-48最简单的驱动方法
28BYJ-48的内部结构请见这里
下面是一个步进电机的演示程序:
#include <reg52.h>
sbit key=P2^0; //按键控制步进电机的方向
unsigned char speed=5; //步进电机的转速
//八拍方式驱动,顺序为A AB B BC C CD D DA
unsigned char code
clockWise[]={0x01,0x03,0x02,0x06,0x04,0x0c,0x08,0x0d};
void delay(unsigned char z)
{
unsigned char x,y;
for(x=0;x<z;x++)
for(y=0;y<110;y++);
}
void main()
{
unsigned char i;
while(1)
{
for(i=0;i<8;i++)
{
if(key) //按键未按下,正转
{
P0=clockWise[i];
delay(speed);
}
else //按键按下,反转
{
P0=clockWise[8-i];
delay(speed);
}
}
}
}
Proteus仿真图及Keil源文件下载:
http://brsbox/filebox/down/fc/79bf41133cc59eaf2ca9531a5382557b 演示动画网站:http://hi.baidu/835705302/blog/item/7d9eb519397d7e1d34fa4148.ht ml
希望以上资料对你有所帮助,附励志名言3条:
1、要接受自己行动所带来的责任而非自己成就所带来的荣耀。
2、每个人都必须发展两种重要的能力适应改变与动荡的能力以及为长期目标延缓享乐的能力。
3、将一付好牌打好没有什么了不起能将一付坏牌打好的人才值得钦佩。