消除阴影和高亮噪声的双梯柱体码本前景检测模型
前景检测算法讲解
前景检测算法_1(codebook和平均背景法)前景分割中一个非常重要的研究方向就是背景减图法,因为背景减图的方法简单,原理容易被想到,且在智能视频监控领域中,摄像机很多情况下是固定的,且背景也是基本不变或者是缓慢变换的,在这种场合背景减图法的应用驱使了其不少科研人员去研究它。
但是背景减图获得前景图像的方法缺点也很多:比如说光照因素,遮挡因素,动态周期背景,且背景非周期背景,且一般情况下我们考虑的是每个像素点之间独立,这对实际应用留下了很大的隐患。
这一小讲主要是讲简单背景减图法和codebook法。
一、简单背景减图法的工作原理。
在视频对背景进行建模的过程中,每2帧图像之间对应像素点灰度值算出一个误差值,在背景建模时间内算出该像素点的平均值,误差平均值,然后在平均差值的基础上+-误差平均值的常数(这个系数需要手动调整)倍作为背景图像的阈值范围,所以当进行前景检测时,当相应点位置来了一个像素时,如果来的这个像素的每个通道的灰度值都在这个阈值范围内,则认为是背景用0表示,否则认为是前景用255表示。
下面的一个工程是learning opencv一书中作者提供的源代码,关于简单背景减图的代码和注释如下:avg_background.h文件:1///////////////////////////////////////////////////////////////////// //////////////////////////////////////////////2// Accumulate average and ~std (really absolute difference) image and use this to detect background and foreground3//4// Typical way of using this is to:5// AllocateImages();6////loop for N images to accumulate background differences7// accumulateBackground();8////When done, turn this into our avg and std model with high and low bounds9// createModelsfromStats();10////Then use the function to return background in a mask (255 == foreground, 0 == background)11// backgroundDiff(IplImage *I,IplImage *Imask, int num);12////Then tune the high and low difference from average image background acceptance thresholds13// float scalehigh,scalelow; //Set these, defaults are 7 and 6. Note: scalelow is how many average differences below average14// scaleHigh(scalehigh);15// scaleLow(scalelow);16////That is, change the scale high and low bounds for what should be background to make it work.17////Then continue detecting foreground in the mask image18// backgroundDiff(IplImage *I,IplImage *Imask, int num);19//20//NOTES: num is camera number which varies from 0 ... NUM_CAMERAS - 1. Typically you only have one camera, but this routine allows21// you to index many.22//23 #ifndef AVGSEG_24#define AVGSEG_252627#include "cv.h"// define all of the opencv classes etc.28 #include "highgui.h"29 #include "cxcore.h"3031//IMPORTANT DEFINES:32#define NUM_CAMERAS 1 //This function can handle an array of cameras33#define HIGH_SCALE_NUM 7.0 //How many average differences from average image on the high side == background34#define LOW_SCALE_NUM 6.0 //How many average differences from average image on the low side == background3536void AllocateImages(IplImage *I);37void DeallocateImages();38void accumulateBackground(IplImage *I, int number=0);39void scaleHigh(float scale = HIGH_SCALE_NUM, int num = 0);40void scaleLow(float scale = LOW_SCALE_NUM, int num = 0);41void createModelsfromStats();42void backgroundDiff(IplImage *I,IplImage *Imask, int num = 0);4344#endifavg_background.cpp文件:1// avg_background.cpp : 定义控制台应用程序的入口点。
双目立体视觉测量系统的设计与实现
双目立体视觉测量系统的设计与实现接下来,双目立体视觉测量系统的软件设计包括图像采集、图像处理、视差计算和三维坐标计算四个主要模块。
图像采集模块负责从相机中获取图像数据,并对图像进行预处理。
预处理包括图像去噪、图像增强和图像矫正等操作。
去噪可以通过滤波算法(如中值滤波)去除图像中的噪声。
图像增强可以通过直方图均衡化等方法提高图像的对比度和清晰度。
图像矫正可以通过图像校正算法(如鱼眼畸变矫正)将图像映射到平面上。
图像处理模块主要用于提取图像中的特征点或特征区域。
特征点可以通过角点检测算法(如Harris角点检测)或边缘检测算法(如Canny边缘检测)进行提取。
特征区域可以通过图像分割算法(如GrabCut分割算法)进行提取。
视差计算模块利用图像间的视差关系来恢复物体的深度信息。
常用的视差计算算法包括基于基线的视差计算算法(如SAD、SSD、NCC算法)和基于全局优化的视差计算算法(如动态规划算法、图割算法)。
在进行视差计算之前,需要先对左右图像进行匹配,即找出对应的特征点或特征区域。
三维坐标计算模块通过视差与相机的内外参数之间的关系,将视差转化为三维物体的坐标。
根据视差与深度的关系,可以使用三角测量原理或基于标定板的方法进行三维坐标计算。
最后,双目立体视觉测量系统的实现需要对系统进行标定和精度评估。
系统标定常用的方法有基于相机投影模型的标定方法(如张氏标定法)和基于粗糙特征点的标定方法(如棋盘格标定法)。
精度评估可以通过与真实值的比对或与其他测量手段的比对来进行。
总之,双目立体视觉测量系统的设计与实现需要兼顾硬件和软件两方面的要素。
正确选择硬件设备、合理设计软件模块,并进行标定与评估,可以提高测量系统的稳定性和精度,满足实际应用的需求。
双目主动立体视觉监测平台靶标编码标志点的设计与识别分析

双目主动立体视觉监测平台靶标编码标志点的设计与识别分析引言双目立体视觉测量是基于视差原理,由多幅图像获取物体三维几何信息的方法。
在计算机视觉系统中,双目立体视觉测量一般由双摄像机从不同的角度同时获取周围景物的两幅图像,或有单摄像机在不同时刻从不同角度获取周围景物的两幅数字图像,并基于视差原理即可恢复出物体的三维几何模型,重建周围景物的三维形状与位置。
在双目立体视觉测量的许多应用中,可以在待测物体表面分布一些具有明显特征且易于识别的元素作为标记点,如圆、十字刻画线等。
若给标记点加载唯一的身份信息,即对标记点进行编码,对图像中标记点进行唯一身份识别后,可以方便,可靠地实现多幅图像间标记点的对应匹配。
基于上述原理,在实验室自主研发并联机器人双目主动立体视觉监测平台的过程中,需要事先知道两个摄像机的初始位置,由于光栅尺的造价昂贵及圆形光栅尺的生产加工难度大,我们设计了含有编码标志点的特殊靶标。
靶标的关键部分为编码标志点,本文主要对实验中所用编码标志点的设计与识别进行研究。
1 靶标的设计本文设计了如图1所示的靶标(其中,中心处的编码标志点是不同的),利用其已知信息,完成对摄像机位置的标定,实现了与圆形光栅尺相同的作用。
在圆形导轨内侧均匀设置了6组(12块)含有一个编码标志点和18个非编码点的靶标(如图2所示),其中编码标志点位于靶标的中心,其余非编码点均为正方形,按一定尺寸关系均匀分布在编码标志点的两侧。
根据实际需要,本文采用了马扬飚等设计的编码标志点。
编码标志点由编码点和标志点组成,其中标志点提供位置信息,编码信息被编译储存在编码点的排布中。
编码标志点应该满足以下要求:·旋转与改变比例的不变性;·对可能存在误差修正的目标数量的强鲁棒陛识别几率;。
一种运动目标阴影轮廓的两步检测算法

基金 项 目: 国家 自然 科 学 基 金 资 助 项 目 (0 70 9 ; 育 部 新 世 纪 人 才 支 持 计 划 ; 技 部 动 漫 软 件 开 发 技 术 团 队支 持 6837)教 科
( 科发 高 [ 0 9 5 3 )重 庆 市 科技 攻关 项 目( 8 8 国 20]9 号 ; 71 )
第2 8卷
第 3期
广西 师范 大学 学报 : 自然科 学版
J un l f a g i r l i ri : trl cec dt n o ra o n x Noma Unv s y Nau a S ineE io Gu e t i
Vo1 28 N o . .3
S t 201 ep . 0
针对 上 述算 法 存在 的 问题 , 本文 提 出 了基于 8个相 邻域 像 素特性 与色 彩 空 间 向量模 型 不变 性 相融 合
的运 动 阴影检 测算 法 。 首先 利用 混合 高斯 模型 [分 离 出带有 阴影 的运 动 目标 区域 , 6 对含 有 阴影 的运动 区域 进行 分类 , 测 出疑似 阴影 区域 , 检 然后 利用 阴影 区域 色彩 向量 在 空 间中与其 对 应 的背景 点颜色 向量 同方 向
题 , 能 严 重 地 影 响 跟 踪 、 别 等 后 续 处 理 , 此提 出 一 种 用 于 运 动 目标 阴影 检 测 的 改进 算法 。先 为 每 个 像 素 可 识 据 点 建 立 混 合 高 斯 模 型分 割 出 运 动 目标 , 用 阴影 区 域 像 素 8 相邻 区 域 上 像 素点 的 亮 度 特 点判 断 疑 似 阴影 , 利 个 然 后运 用 色 彩 空 间 向量 模 型 的 颜 色 不 变性 对 所 有 疑 似 阴 影 进 行 聚 类 , 一 步 完成 阴 影 检 测 。试 验 结 果 表 明 , 进
一种基于统计模型的前景阴影消除算法杨志邦
1
引
言
是图像领域难解问题之一 行了研究
[914 ]
[7 , 8 ]
. 国内外诸多学者专家对其进
. 本文在运动目标检测算法所获得的前景基础
运动目标检测是从实时变化的背景中将运动物体快速准 确地分离出来, 它在智能视频监控、 事故检测、 自动导航等系 统中具 有 广 泛 的 应 用 前 景, 已经成为视觉领域研究的重 点
Email: yangzhibang2006@ 126. com
摘
要: 视频图像中存在的阴影是影响运动目标检测效果的关 键 因 素 之 一, 对 阴 影进行 检 测 和 消 除 已 成为 运 动 检 测中 的 重 要 研究内容. 针对阴影消除问题, 本文采用直方图统计方法, 将阴影特征引入到传统混合高斯模型中, 基于统计特征建立阴影高 斯 模型; 在模型基础上, 提出一种新的前景阴影消除算法, 将前景像素 与 阴 影模型进行 匹 配, 实 现 阴 影的 判 定和 消 除. 与 同 类 算法 : 在阴影检测率和阴影区分度上均有显著提升. 的对比分析表明 本文算法对于不同场景下的阴影消除是准确且实时的, 关 键 词: 运动目标检测; 统计特征; 高斯模型; 前景; 阴影消除 1220 ( 2013 ) 02042306 中图分类号: TP391 文献标识码: A 文 章 编 号: 1000-
[13 ]
上, 对阴影消除算法进行研究 . 阴影消除过程需要 使 用 阴 影 特 征, 主要包括纹理和属 性
[4 ]
. 基于纹理的阴影消除算法认为: 阴影区域跟无阴影区
.
运动目标检测主要依据前景的运动特征从背景中提取运 动目标, 采用的方法包括帧差法 、 背景差法、 光流法等. 由于阴 影具有与运动物体相同的运动特征, 通常被误检测为前景. 如 果阴影和运动物体融合, 将影响目标的几何特征; 如果阴影与 运动目标相分离, 则容易被误检测为新的目标
基于双层背景的遗弃物检测方法

| y wod |GasinMitr dl Ke r s usa xueMo e( GMM) sd vrg lo tm; h s sa cfrgo n eet n t gtt c n ; bn o e bet ; l ea ea ea rh g ot tt oeru dd tc o ; a e r k g a ad nd ojc i gi ; i i r ai
h o e r u d d t c i M a h f g r h a d p ril t l o h a s d t r c i g Ex e i n s lsp ov a i y o e me h d t ef r g o n e e t n, e n S it l o t m n a tce fl ra g rt m e u e o ta k n . p rme t e u t r e t e v l t f h t o . o a i i e i r r h di t
Ab n o e c tcinM eh d a d n dob t i Dee t t o e o
Ba e n Do s d 0 ubl y rBa kg o eLa e c r und
W ANG e , Ch n GUO i h n , ENG a - i J- a g F c Xio r n a
人群。基于背景差分的方法的关键是背景建模 ,有学者提 出
其 中:
㈣
D( ) f ) ., i = ( 一 一 , , (刮
常数 ( ) O1 ,通过上述 背景更新算法 ,采用背景差 分 , ∈(, ) 法得到运动前景。 22 自适应高斯混合模 型改进形 式 . 文献[—】 出用 G 89提 MM 描述像素灰度值 变化 ,每一个像 素 的灰度值用 个高斯分布描述 , 这 个分布一部分标识背 景的像素值 ,其余部分则表示前景 的像素值 。 由于高斯混合模 型是 自适应更新 的,当物体静止时 ,逐
一种使用去除鬼影对前景目标提取的方法及系统[发明专利]
![一种使用去除鬼影对前景目标提取的方法及系统[发明专利]](https://img.taocdn.com/s3/m/653ebcd0ee06eff9aff807da.png)
专利名称:一种使用去除鬼影对前景目标提取的方法及系统专利类型:发明专利
发明人:张军,雷民,金淼,陈习文,卢冰,王斯琪,王旭,陈卓,郭鹏,周玮,汪泉,付济良,聂高宁,齐聪,郭子娟,匡义,余雪芹,
刘俊,朱赤丹
申请号:CN201911181481.X
申请日:20191127
公开号:CN111062974A
公开日:
20200424
专利内容由知识产权出版社提供
摘要:本发明公开了一种使用去除鬼影对前景目标提取的方法及系统,属于前景目标检测技术领域。
本发明方法,包括:获取视频流信息,选取视频流信息中初始帧图像的多个任意位置点的像素值作为样本库,选择初始帧图像任意位置邻域中等概率的对多个像素值,对样本库进行赋值,生成背景模型;选取视频流信息中的任意帧,对任意帧的任意像素点进行前景和背景分类;以预设概率将任意像素点的像素值更新到背景模型的样本库中;确定任意像素点为鬼影像素点,去除鬼影像素点对前景目标进行提取。
本发明引入动力学模型与闪烁程度来评估像素点的动态程度,并以此自适应更新采样距离阈值、匹配阈值,提升前景提取精确率的同时降低漏检率。
申请人:中国电力科学研究院有限公司,国家电网有限公司
地址:430070 湖北省武汉市洪山区珞瑜路143号综合楼
国籍:CN
代理机构:北京工信联合知识产权代理有限公司
代理人:姜丽楼
更多信息请下载全文后查看。
一种运动目标阴影轮廓的两步检测算法
一种运动目标阴影轮廓的两步检测算法王玮;李红波;吴渝【摘要】由于运动阴影具有与运动前景相同的特性,在视频处理中分割前景时存在误把阴影检测为前景的问题,可能严重地影响跟踪、识别等后续处理,据此提出一种用于运动目标阴影检测的改进算法.先为每个像素点建立混合高斯模型分割出运动目标,利用阴影区域像素8个相邻区域上像素点的亮度特点判断疑似阴影,然后运用色彩空间向量模型的颜色不变性对所有疑似阴影进行聚类,进一步完成阴影检测.试验结果表明,该方法检测精度高、效果好、速度快,有广泛的应用前景.【期刊名称】《广西师范大学学报(自然科学版)》【年(卷),期】2010(028)003【总页数】5页(P165-169)【关键词】背景建模;混合高斯;阴影检测【作者】王玮;李红波;吴渝【作者单位】重庆邮电大学,网络智能研究所,重庆,400065;重庆邮电大学,网络智能研究所,重庆,400065;重庆邮电大学,网络智能研究所,重庆,400065【正文语种】中文【中图分类】TP391.41运动目标检测作为机器视觉领域中的底层,它的目标是尽可能精确地从视频图像序列中将变化的区域提取出来,其检测效果对如目标分类、跟踪和行为理解等图像的后期处理过程产生很大的影响。
然而,在检测运动目标时,运动目标投影的运动阴影也会被检测为运动前景的一部分,造成运动目标的合并、几何形变、甚至丢失。
如何获得更好的运动目标前景检测效果是国内外学者研究的热点问题。
现有的阴影检测算法主要分为两类:基于模型的方法[1]和基于特征的方法[2-3]。
前者是利用场景、运动目标、光照条件等先验信息建立阴影的统计模型,根据此模型来判别每个像素点是否属于阴影区域;后者一般直接采用如纹理、亮度、颜色以及饱和度等图像像素的特征进行判断。
CHEN Baisheng等在HSV颜色空间中根据阴影区域使得背景变暗、背景在被阴影覆盖前后的亮度比值成近似线性、阴影区域不会使背景像素点的色度有很大改变的特点进行阴影抑制[3]。
基于自适应亮度高程模型的路面阴影消除算法研究

基于自适应亮度高程模型的路面阴影消除算法研究裘国永;李丽;李良福;马卫飞【期刊名称】《郑州轻工业学院学报(自然科学版)》【年(卷),期】2018(033)001【摘要】针对亮度高程模型的阴影消除算法GSR的关键参数需要手动设置、亮度等高区域的划分和亮度补偿方法也都存在严重缺陷的问题,提出一种基于自适应亮度高程模型的路面阴影消除算法SGRSR:首先,采用形态学膨胀运算和高斯平滑滤波消除路面裂缝和路面纹理对后续阴影区域划分的影响;然后,利用最大熵阈值分割求解出高斯平滑后路面影像阴影区域和非阴影区域的划分阈值,以此实现划分阈值的自适应确定;最后,基于改进的亮度等高区域划分模型和亮度补偿方法,实现路面阴影的消除.实验结果表明,与GSR算法相比,本算法不仅能够对路面阴影影像进行自动的阴影消除,而且在阴影消除后,路面影像的亮度过渡更加自然.【总页数】9页(P79-87)【作者】裘国永;李丽;李良福;马卫飞【作者单位】陕西师范大学计算机科学学院,陕西西安710119;陕西师范大学计算机科学学院,陕西西安710119;陕西师范大学计算机科学学院,陕西西安710119;陕西师范大学计算机科学学院,陕西西安710119【正文语种】中文【中图分类】TP391.4【相关文献】1.基于自适应亮度高程模型的路面阴影消除算法研究 [J], 裘国永;李丽;李良福;马卫飞;2.基于亮度校正模型的多参量权衡与灰度权值算法研究 [J], 郝亚茹;邓招奇;邓春健3.旧电影胶片划痕检测算法研究——一种基于空域亮度模型与形态学特征的方法[J], 庄晓宇;杨小康;陈立4.基于区域亮度自适应校正的茶叶嫩芽检测模型 [J], 吕军;方梦瑞;姚青;武传宇;贺盈磊;边磊;钟小玉5.基于亮度的自适应色度空间模型肤色算法研究 [J], 赵晓晖;申铉京因版权原因,仅展示原文概要,查看原文内容请购买。
双背景模型的快速鲁棒前景检测算法
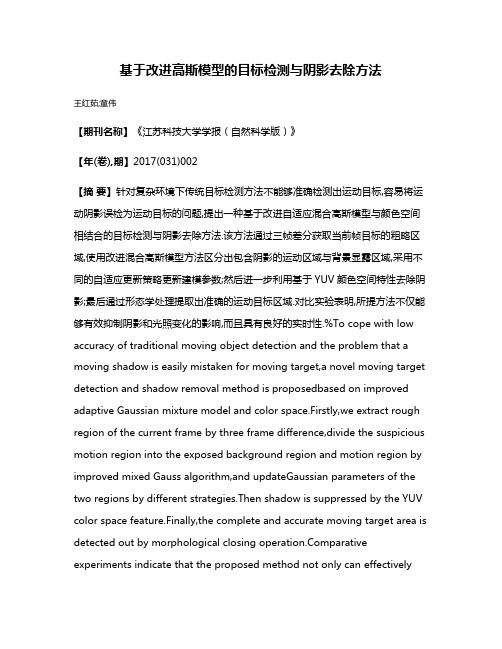
双背景模型的快速鲁棒前景检测算法谢维波;刘文;夏远祥;李雪芬【摘要】针对前景检测中的光照变化问题,提出一种基于双背景模型的快速鲁棒前景检测算法.通过建立简单的快慢双背景模型,提高前景检测的效率.结合视频时间感知信息和光照补偿措施,增强算法对光照变化的鲁棒性,提高前景检测精度.在具有光照变化的公开数据集上进行测试,实验结果表明:所提出的算法不仅对光照变化有较强的鲁棒性,同时,具有极快的处理速度.%In order to solve the problem of illumination changes in foreground detection,a fast and robust foreground detection algorithm based on double background model was proposed in this paper.The efficiency can be improved by establishing a simple double background model with fast and slow update rate;the robustness with illumination variations can be enhanced by combining with video time perception information and illumination compensation measures,and hence improving the precision of the foreground detection.Experiments were performed on several challenging sequences with illumination variations in the benchmark evaluation,and the results show that the proposed algorithm not only owns good robustness with changing of illumination,but also has very fast process speed.【期刊名称】《华侨大学学报(自然科学版)》【年(卷),期】2017(038)004【总页数】6页(P550-555)【关键词】光照鲁棒;前景检测;双背景模型;视频信息;时间感知信息【作者】谢维波;刘文;夏远祥;李雪芬【作者单位】华侨大学计算机科学与技术学院, 福建厦门 361021;华侨大学计算机科学与技术学院, 福建厦门 361021;华侨大学计算机科学与技术学院, 福建厦门 361021;华侨大学科学技术研究处, 福建厦门 361021【正文语种】中文【中图分类】TP391前景检测是计算机视觉中一个重要分支,其性能高度依赖于有效背景模型的建立;而背景模型受多种因素的影响,包括光照、时间、遮挡、抖动和突然静止的前景等因素[1].为了解决这些问题,研究者们近年来提出了大量的背景建模方法[2].文献[3-6]提出的混合高斯模型(GMM)、核密度估计模型、码本模型和VIBE等经典背景模型,虽然大都能够应对缓慢的光照变化,但是无法处理如开关灯、百叶窗的打开和关闭等带来的光照突变问题.文献[7-8]提出的ESI模型和MB2S模型虽然可以在一定程度上处理光照突变的影响,但是复杂度太高,需要较大的硬件资源才能达到实时应用的可能.背景模型涵盖了视频序列中很长一段时间的状态,通过一定的更新率去适应一个新的环境.快慢双背景模型是利用更新率的一快一慢两种模型建立稳定背景的方法[9],既可以利用慢速背景模型应付临时的变化和噪音,又可以利用快速背景模型快速发现最新变化.文献[10-11]证实了双背景模型可以有效提高前景目标的检测精度.为了解决光照突变的影响达到实时应用的要求,本文建立一种简单的快慢双背景模型,并使用一定的光照补偿措施,提出一种新的前景检测算法.1.1 双背景模型的建立为了建立鲁棒的前景检测模型,首先需要建立两个更新速率快慢不一的背景.设表示具有较快更新率的背景,表示具有较慢更新率的背景,It(i)表示视频序列中的第t帧的像素点i,αs表示慢速背景模型的更新率,则慢速背景模型的更新方式表示为快速背景模型采用相同的更新策略,但是控制更新率αf=kαs,其中,k为常数,取经验值10.背景模型的更新率由当前帧的视频时间感知信息决定.对新来的每一帧图像与背景图像相减后,阈值化就可以得到对应不同背景的前景图.设表示慢速背景模型对应的前景图像,表示快速背景模型对应的前景图像,则慢速前景图为式(2)中:Ts表示得到慢速前景所使用的阈值,默认值为60.快速前景可以采用相同的更新策略获得,其中,Ts = λTf,λ取经验值2.5.1.2 视频时间感知信息时间感知信息(time perception information,TI)表征视频序列在时域上的复杂度,是表示视频片段时间变化次数的测量法[12].它通常高于高速运动的片段,视频序列变化越剧烈,TI值越高.视频序列中某一帧的TI值表达式为式(3)中:Ft(x,y)表示时间上第t帧中第x行第y列的像素;STDspace表示两帧在空间上的标准差.由于TI值能够很好地描述视频信息的变化,而背景的更新率也只有和视频信息的变化一致趋势时才能更好地描述背景.因此,取慢速背景模型的更新率αs由式(4)决定,即式(4)中:TImax表示TI可能出现的最大值,由TI的定义式可知,对于8 bit像素的图像,TImax为255.1.3 光照补偿模型光照突变将导致前景检测算法不同程度地把背景误测为前景或者前景误判为背景.因此,针对光照突变,需要一个合适光照补偿模型对背景进行补偿,从而让背景尽快适应当前的光照条件,减少误检.假设只考虑视频场景中光照突变的影响,不考虑相机抖动、伪装、图像丢失等情况,为了应对光照变化带来的影响,需要采用不同的背景模型更新策略.1.3.1 光照突变的判定快速前景可以最快反映当前帧中出现的变化,即通过快速前景中前景点与背景点的比例r判定是否发生光照突变.当r>Tr时,可以认定发生光照突变,Tr为光照突变的阈值,建议取Tr≥0.3.1.3.2 光照突变程度的判定对于不同程度的光照突变,需要采用不同的补偿策略.为了判断光照突变的程度,首先,计算当前帧、快速背景、慢速背景中像素点的平均亮度值.通过当前帧与不同背景的平均亮度差度量光照突变的程度.为了加快计算速度和噪音点的干扰,采用随机采样的方式选取一部分像素点作为代表计算整个图像的平均亮度.设S代表随机采样点集合,则当前帧的平均亮度L(I(t)),慢速背景的平均亮度(t)),快速背景的平均亮度(t))就可以通过S中的像素点计算获得,并设像素点的采样率为40%.然后,计算当前帧的平均亮度与快慢背景的平均亮度的差SAIC即可判定光照突变的程度,从而可以对不同光照突变进行不同的补偿策略. 当前帧与快速背景的平均亮度差定义为||.当前帧与慢速背景的平均亮度差定义为||.1.3.3 光照补偿策略 1) 当|It(i)-BGt-1(i)|<SAIC时,可以认定为当前帧发生较小的光照变化(包括局部光照突变).此时,考虑可能由于稳定背景和一些变化较小的区域不需要进行光照补偿或者需要较小的补偿值,而对于接近SAIC的像素,则需要较大补偿值.而Sigmod函数曲线刚好满足这样的变化要求,将Sigmod函数引入补偿量的计算中,可得到补偿方案为式(5)中:BGt(i)表示快慢速背景模型像素点i;It表示当前帧的像素i;δ表示补偿系数,;D表示|It(i)-BGt-1(i)|.使用Sigmod函数可以保证补偿系数对较小光照变化不敏感而对接近于SAIC的变化敏感,防止过补偿的情况.当SAIC等于10时,补偿系数δ的变化曲线,如图1所示.2) 当|It(i)-BGt-1(i)|>SAIC时,可以认定为发生了较大的光照突变,此时,需要对该像素进行较大值的补偿.可以采用下式的补偿方案,即式(6)中:DTIt表示为式(7)中:maxt表示在发生光照突变时间序列上的最大值函数;ξ为常系数,取经验值0.4.1.4 稳定前景提取经过上述算法流程之后,稳定的前景图像就可以经过下式运算,获得通过快速前景图像和慢速前景图像.即式(8)中:和由式(2)获得.整个过程当中,用户可以不设定任何参数,全部采用提供的经验值即可,也可对极少数参数进行自定义设置,如前景阈值Ts和光照突变阈值Tr.2.1 评价指标前景检测算法的评价指标多样化,常用的指标有精确度(RP)、查全率(R)、F1评价值(F1)和帧率(SFP).SFP为算法每秒能够处理的帧数,用于评价算法的处理速度和复杂度,其他指标分别定义为式(9)中:TP表示检测正确的前景点数;FP表示背景被误检为前景的点数;FN表示前景被误检成背景的像素点数;F1综合了精确度和查全率两种指标,具有较为全面的评价[13].2.2 数据集与对比算法为证明算法的有效性,将文中提出的算法分别在公开的标准前景检测数据集Wallflower和实际的监控视频数据上进行测试,并选取当前应用较为广泛和效果较好的混合高斯模型(GMM)[3],通用视频背景提取算法(VIBE)[6]、多层背景模型(MLBGS)[14]、自适应自组织网络(LBASOM)[15]进行对比.文中算法是基于VS2013+Opencv2.4.10实现的,对比算法采用文献[2]中提供的算法库或原文作者提供的算法库实现.硬件配置为Intel i5-4590处理器,主频3.3 GHz,8 GB内存.2.3 5种前景检测算法的对比分析文中算法与其他4种算法在标准数据集Wallflower(分辨率为160 px×120 px)上的前景检测结果,如表1所示.表1中的视频序列可以分为4类:Bootstrap代表前景驻留的场景;Camouflag,ForegroundAperture代表存在伪装情况的视频场景;LightSwitch和TimeOfDay代表存在光照突变的场景,其中,LightSwitch 是灯光突然打开的场景;TimeOfDay是一天中光照均匀变化;WavingTrees代表存在抖动背景的场景.由表1可知:文中提出的算法在所有的视频序列上都有较好的表现,特别是在发生较大光照突变的LightSwitch序列上,其余方法模型基本失效,而文中方法仍能较好地还原前景.在TimeOfDay序列上,GMM和VIBE模型存在空洞较为严重的情况,而LBASOM则将背景中的光源检测为前景,文中算法仅次于MLBGS模型,在引入少量前景的情况下,较好地还原了前景.从这两个视频序列可以看出文中算法对光照突变有一定的抑制能力.从WavingTrees序列可以看出,文中算法只将极少的抖动背景检测成前景,说明文中算法有一定处理背景抖动的能力;不过,从Camouflag序列上看到文中算法还存在一定的不足,不能很好地处理伪装,导致前景检测的空洞.为了更好地量化文中算法的检测性能,分别给出5种算法在Wallflower数据集上的精确度RP、查全率(R)和F1评价值的对比结果,如表2所示.由于该数据集的分辨率较低,处理速度SFP对算法实际应用不具有参考价值,所以表2未给出5种算法在该数据集上的SFP值.此外,5种算法在真实视频数据的效果图和用SFP表示的处理速度结果,如表3所示.表2,3中:针对各项指标,获得最大值的用粗体表示,次大值用斜体表示.由表2,3可知:MLBGS算法在所有算法中综合各项指标取得最好的结果.文中算法在性能指标不占很大优势,但是可以看到算法在所有序列上都有较高的精度值,说明算法误检率较低.结合表3的数据可知:MLBGS算法和LBASOM算法的复杂度都较高,特别是MLBGS算法无法达到实时应用的条件;文中所提出的算法在分辨率为352px×288 px的视频上处理速度(SFP)达到510.558,仅次于VIBE算法的590.303,这样的处理速度足够应对实时应用.相对VIBE算法,文中算法在多个视频序列上取得更高的精度值.在LightSwitch序列上,结合表1的检测效果和表2的各项指标,文中算法都取得较优的表现,可以说明文中算法可以有效地处理光照突变场景.综合所有情况考虑,所提出的算法不仅可以实现快速处理,同时还能够针对各种情况特别是在光照突变情况下达到鲁棒的效果,具有一定的优势.基于双背景模型的思想,采用简单的双背景模型建立方法,结合视频时间感知信息(TI)对视频变化有较好描述的特点,实现了背景更新率自动更新的特点.通过随机采样像素点和平均亮度差的方式,建立针对局部光照突变和全局光照突变的光照补偿模型,对发生光照突变的视频序列有较好的检测效率.由于对前景提取采用简单的阈值化导致存在无法应对前景伪装的情况,使得前景容易出现空洞和低召回率的情形,因此,解决前景伪装将是下一步需要研究的主要问题.【相关文献】[1] BOUWMANS T,PORIKLI F,HOFERLIN B,et al.Background modeling and foreground detection for video surveillance[M].Boca Raton:CRC Press,2014:3-8.[2] SOBRAL A,VACAVANT A.A comprehensive review of background subtraction algorithms evaluated with synthetic and real videos[J].Computer Vision and Image Understanding,2014,122:4-21.[3] STAUFFER C,GRIMSON W E L.Adaptive background mixture models for real-time tracking[C]∥IEE E Computer Society Conference on Computer Vision and Pattern Recognition.Fort Collins:IEEE Press,1999:246-252.[4] ELGAMMAL A,HARWOOD D,DAVIS L.Non-parametric model for background subtraction[C]∥European Conference on Computer Vision.Dublin:Springer Berlin Heidelberg,2000:751-767.[5] KIM K,CHALIDABHONGSE T H,HARWOOD D,et al.Real-time foreground-background segmentation using codebook model[J].Real-Time Imaging,2005,11(3):172-185.[6] BARNICH O,VAN DROOGENBROECK M.ViBe: A universal background subtraction algorithm for video sequences[J].IEEE Transactions on Image Processing,2011,20(6):1709-1724.[7] VOSTERS L,SHAN Caifeng,GRITTI T.Real-time robust background subtraction under rapidly changing illumination conditions[J].Image and Vision Computing,2012,30(12):1004-1015.[8] SAJID H,CHEUNG S C S.Background subtraction under sudden illumination change[C]∥2014 IEEE 16th International Workshop on Multimedia Signal Processing.Jakarta:IEEE Press,2014:1-6.[9] LI Xuli,ZHANG Chao,ZHANG Duo.Abandoned objects detection using double illumination invariant foreground masks[J].IEEE Journal of Selected Topics in Signal Processing,2010,2(4):582-596.[10] GRUENWEDEL S,PETROVIC N I,JOVANOV L,et al.Efficient foreground detection for real-time surveillance applications[J].Electronics Letters,2013,49(18):1143-1145. [11] MAHMOUDPOUR S,KIM M.Robust foreground detection in sudden illumination change[J].Electronics Letters,2016,52(6):441-443.[12] 国际电联无线电通信全会.ITU-R BT.1788 建议书: 对多媒体应用中视频质量的主观评估方法[S].ITU:ITU-R 102/6 号研究课题,2007:1-13.[13] 杨涛,李静,潘泉,等.一种基于多层背景模型的前景检测算法[J].中国图象图形学报,2008,13(7):1303-1308.[14] YAO Jian,ODOBEZ J M.Multi-layer background subtraction based on color and texture[C]∥IEEE Conference on Computer Vision and PatternRecognition.Minneapolis:IEEE Press,2007:1-8.[15] MADDALENA L,PETROSINO A.A self-organizing approach to background subtraction for visual surveillance applications[J].IEEE Transactions on Image Processing,2008,17(7):1168-1177.。
汪雅洁

学生姓名:汪雅洁 指导老师:宋雪桦
阴影的影响
只要有光线就免不了有阴影的存在,而且阴 影和产生阴影的目标具有相同的运动特征,因此 阴影常常被误检为前景。 阴影会造成运动目标形状的变化、目标的合 并、目标丢失、甚至假目标的出现,对后续工作 会产生很大的负面影响。
基于RGB颜色模型的阴影去除算法流程图
前景的提取
通过混合高斯背景建模法建立背景模型后, 将原始图像与背景进行比较,便能反映出一个运 动物体在此背景下运动的结果,得到运动目标 (即运动前景)。
图1 当前帧
图2 背景帧
图3 提取的前景图
阴影的去除
在RGB颜色空间中,利用矢量来表征像素点。 以当前图像中的像素点矢量和与之相对应的背景 像素点矢量相减,得到能够表征亮度和色调的颜 色模型,最后通过阈值判断对阴影进行判断并去 除。
前景目标去噪与重建
经过处理之后,由于运动物体与背景的交互 作用,不可避免地会出现噪声等,可以通过数学 形态学不断的膨胀和腐蚀对失真的前景目标进行 重建。
实验结果
图4 阴影去除结果示意图
总结
本课题设计方案是基于RGB颜色模型来对运动目 标中的阴影进行去除。通过实验,最终取到了较 好的效果。 目前阴影检测与去除的方法有很多,如基于HSV HSV 颜色模型的、基于纹理不变性的、基于边缘信息 的、基于一阶梯度的、还有是通过对几种阴影属 性的混合来去除阴影。由于时间原因,本文中未 涉及研究。
基于隐SVM和混合高斯模型的目标检测算法

基于隐SVM和混合高斯模型的目标检测算法陆星家;王玉金;陈志荣;林勇【摘要】针对目标检测算法的复合检测模板与变形约束进行研究,在目标外观状态满足高斯分布的前提下,提出一种结合隐支持向量机(LSVM)和混合高斯模型(GMM)的目标检测算法.使用滑动窗算法提取检测目标的梯度方向直方图特征,通过引入二次损失函数,将LSVM在目标检测训练过程中的半凸约束问题转化为凸优化问题,并利用GMM获得目标检测的全局优化结果.实验结果表明,相比双树分枝界限算法和DPM算法,该算法具有更高的目标检测准确率.【期刊名称】《计算机工程》【年(卷),期】2016(042)006【总页数】6页(P287-292)【关键词】隐支持向量机;混合高斯模型;多目标检测;变形约束;半凸优化【作者】陆星家;王玉金;陈志荣;林勇【作者单位】宁波工程学院理学院,浙江宁波315211;宁波工程学院理学院,浙江宁波315211;宁波工程学院理学院,浙江宁波315211;宁波工程学院理学院,浙江宁波315211【正文语种】中文【中图分类】TN911.73中文引用格式:陆星家,王玉金,陈志荣,等.基于隐SVM和混合高斯模型的目标检测算法[J].计算机工程,2016,42(6):287-292.英文引用格式: Lu Xingjia,Wang Yujin,Chen Zhirong,et al.Object Detection Algorithm Based on Latent SVM and Gaussian Mixture Model[J].Computer Engineering,2016,42(6):287-292.近年来,随着互联网技术的快速发展,产生大量图像和视频数据,如何从这些图像和视频数据中提取语义信息成为国内外学者关注的重点。
目标检测技术主要利用图像、视频中对象的几何和统计特征完成被检测目标的识别,其在许多领域都有广泛的应用,如交通管理部门利用目标检测技术对机动车进行检测,查处违章车辆;安全部门在公共场合对异常事件和可疑人员进行检测和分析[1-3]。
数字监控系统中基于阴影消除的目标自动提取
数字监控系统中基于阴影消除的目标自动提取
黄英; 丁晓青; 王生进
【期刊名称】《《ITS通讯》》
【年(卷),期】2004(006)001
【摘要】智能视频监控系统需要从静止摄像头拍摄的实际视频序列中抽取并跟踪
运动物体,剔除物体的阴影区域。
为此,本文提出一种基于图像边界差值信息的消除阴影的前景检测算法,利用阴影区域图像的边界信息与背景相比基本保持不变的特征,抽取输入图像与背景边沿特征的差值。
这样图像前景区域特别是边界附近差值比较大,而背景和阴影区域差值比较小。
接着本文采用基于固定网格的围线模型,从图像的外框开始,由外向内收敛,最后收敛围线就是前景物体的边界。
实验结果表明,与其他前景检测算法相比,本文算法效率高,前景检测准确率高,可以非常好地消除图像噪声、室内阴影和室外弱阴影。
【总页数】7页(P99-105)
【作者】黄英; 丁晓青; 王生进
【作者单位】清华大学电子工程系智能图文处理研究室,100084
【正文语种】中文
【中图分类】U491.116
【相关文献】
1.基于背景重构和阴影消除的运动目标分割 [J], 路红;费树岷;郑建勇;张涛
2.基于对象的Boosting方法自动提取高分辨率遥感图像中建筑物目标 [J], 孙显;
王宏琦;张正
3.基于阴影属性的运动目标阴影消除方法研究 [J], 于飞;田亚菲;高伟明;张志成
4.视频图像中运动目标的阴影消除法 [J], 张霞
5.基于Kalman滤波和阴影消除的运动目标检测 [J], 曹洁;白艳红
因版权原因,仅展示原文概要,查看原文内容请购买。
基于改进型LBP特征的运动阴影去除算法

基于改进型LBP特征的运动阴影去除算法
郝灿;朱信忠;赵建民;徐慧英
【期刊名称】《计算机系统应用》
【年(卷),期】2010(019)005
【摘要】在局部二值模式(LBP)基础上,运用一种改进的局部三值模式(LTP)纹理特征提取方法.并把这种提取方法运用到运动阴影去除中.该方法首先利用自适应高斯混合模型进行背景建模,得到背景和含有阴影的前景目标;并用亮度属性得到疑似阴影分块,然后再把疑似阴影区域和已获取背景相应位置的LTP纹理相似性进行判断;最后得到准确的阴影区域并实现阴影去除.实验结果表明,该算法能够很好地抑制分割噪声,准确地去除出运动阴影,具有较好的实验效果.
【总页数】4页(P80-83)
【作者】郝灿;朱信忠;赵建民;徐慧英
【作者单位】浙江师范大学数理与信息工程学院,浙江,金华,321004;浙江师范大学数理与信息工程学院,浙江,金华,321004;浙江师范大学数理与信息工程学院,浙江,金华,321004;浙江师范大学数理与信息工程学院,浙江,金华,321004
【正文语种】中文
【相关文献】
1.基于多特征融合的运动阴影去除算法研究 [J], 曾泽兴;曾庆宁;蔡晓东;王春利
2.基于多特征融合的运动阴影去除算法 [J], 陈嵘;李鹏;黄勇
3.基于多特征融合的运动阴影去除算法 [J], 赵林林;陈一民;邹一波
4.基于多特征融合的运动车辆阴影去除算法 [J], 吴国栋; 张爱梅; 黄晓; 姚鹏威
5.基于改进型LBP算法的虹膜特征提取仿真 [J], 谭静仪;黄文淑;刘硕;麦晓研;杨双玲;李颖瑜;陈键聪;夏阳;马丽娟;陈思娟;黄丹蓝;陆清健
因版权原因,仅展示原文概要,查看原文内容请购买。
基于改进高斯模型的目标检测与阴影去除方法
基于改进高斯模型的目标检测与阴影去除方法王红茹;童伟【期刊名称】《江苏科技大学学报(自然科学版)》【年(卷),期】2017(031)002【摘要】针对复杂环境下传统目标检测方法不能够准确检测出运动目标,容易将运动阴影误检为运动目标的问题,提出一种基于改进自适应混合高斯模型与颜色空间相结合的目标检测与阴影去除方法.该方法通过三帧差分获取当前帧目标的粗略区域,使用改进混合高斯模型方法区分出包含阴影的运动区域与背景显露区域,采用不同的自适应更新策略更新建模参数;然后进一步利用基于YUV颜色空间特性去除阴影;最后通过形态学处理提取出准确的运动目标区域.对比实验表明,所提方法不仅能够有效抑制阴影和光照变化的影响,而且具有良好的实时性.%To cope with low accuracy of traditional moving object detection and the problem that a moving shadow is easily mistaken for moving target,a novel moving target detection and shadow removal method is proposedbased on improved adaptive Gaussian mixture model and color space.Firstly,we extract rough region of the current frame by three frame difference,divide the suspicious motion region into the exposed background region and motion region by improved mixed Gauss algorithm,and updateGaussian parameters of the two regions by different strategies.Then shadow is suppressed by the YUV color space feature.Finally,the complete and accurate moving target area is detected out by morphological closing parative experiments indicate that the proposed method not only can effectivelyrestrain the influence of shadow and lighting changes,but also has good real-time performance.【总页数】6页(P172-177)【作者】王红茹;童伟【作者单位】江苏科技大学机械工程学院,镇江 212003;江苏科技大学机械工程学院,镇江 212003【正文语种】中文【中图分类】TP391.41【相关文献】1.基于改进混合高斯模型的车辆多目标检测方法 [J], 李珣;南恺恺;景军锋2.基于改进的混合高斯模型的运动目标检测方法 [J], 王东方;王玉德;王景武3.一种改进的基于高斯模型的目标检测方法 [J], 任世卿;王思思;陶传会4.基于改进混合高斯模型的运动目标检测方法 [J], 张国平;高兆彬5.基于改进混合高斯模型与阴影去除的目标检测 [J], 王林;和萌因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
声 消除性 能 , 平均 阴影和 高亮噪声 消除 率分 别约为 7 O . 6 1 和8 3 . 4 1 , 均 高 于对 比模 型 。 关键 词 :阴影 ; 高亮噪 声 ; 码本 ; 前景 检测 ; 智能视 觉监 控
i S c o ns t r uc t e d i n t he l o we r p a r t o f t he mo de 1 ba s e d o n t he c h a r a c t e r i s t i c s t ha t t h e s ha d o w i S l e s s br i ght t ha n t h e ba c kg r ou nd a nd t h e c hr o ma t i c i t y o f s ha do w i s di f f e r e n t f r om t ha t o f t he ba c k gr ou nd .The n a n i nv e r t e d t r a p e z i u m c yl i n de r s t r uc t u r e f or h i g hl i g ht de t e c t i o n i s c on s t r u c t e d i n t h e u pp e r p a r t o f t he mo de l b a s e d o n t he c ha r a c t e r i s t i c s t ha t t he hi gh l i g ht i s br i ght e r t h a n t he ba c k gr ou nd a nd t h e c hr o ma t i c i t y of hi g hl i g ht i s di f f e r e n t f r o m t he b a c kg r ou nd The D TCC mo de l
( D TC C ) 前景 检测模 型 。首先 , 根 据 阴影 与 背 景 相 比 亮 度 较 低 且 色 度 不 同 的 特 点 , 将 模 型 下 部 构 造
成 正立 的梯 柱体 阴影检 测 区; 随后 , 根 据 高亮噪 声与 背景相 比 亮度 较 高 、 色度 不 同的特 点 , 将模 型上 部 构造 成倒 立的梯 柱体 高亮噪 声检 测 区域 ; 最后 , 模型 中部 采用 圆柱体构造成 主体背景 区域 , 最终 形 成 D T C C模型 。实验 结果表 明 : D T C C模 型具 有更 高的 实时性 , 平 均 帧率 约为 1 5 . 6 1帧/ s , 比 i GMM
第 4 7卷
第 4期
西 安 交 通 大 学 学 报
J OURNAL OF XI ’ AN J I AOTONG UNI VERS I TY
Vo 1 . 4 7 NO . 4
A pr .2 O1 3
2 0 1 3年 4月
DOI :1 0 . 7 6 5 2 / x j t u x b 2 0 1 3 0 4 0 0 6
S ha d o w a nd Hi g hl i g h t S u pp r e s s i o n
HU ANG J i n,J I N We i d o n g, QI N Na , ZHOU Ya n, I AU J i n g b o
( Sc h o o l o f El e c t r i c En g i n e e r i n g,S o u t h we s t J i a o t o n g Un i v e r s i t y,Che n g d u 6 1 0 0 3 1 ,Ch i n a )
i n t e l l i g e nt v i s ua l s u r v e i l l a n c e . Fi r s t a n e r e c t e d t r a p e z i u m c y l i nd e r s t r uc t u r e f o r s h a d ow d e t e c t i on
Ab s t r a c t : A f o r e g r ou nd de t e c t i o n m o de l f or d ou bl e — t r a pe z i u m c y l i nd e r c o d e b oo ks ( DT CC ) i s
pr o p os e d t O s ol v e t h e p r ob l e m t ha t t he r e e x i s t s s ha d o w a nd h i g hl i g ht i n f o r e gr o un d d e t e c t i on i n
中 图 分 类 号 :T N9 1 4 . 4 2 文 献 标 志 码 :A 文 章 编 号 :0 2 5 3 — 9 8 7 X( 2 0 1 3 ) 0 4 — 0 0 2 8 — 0 7
Do u b l e - T r a p e z i u m Cy l i n d e r Co d e b o o k Mo d e l f o r F o r e g r o u n d De t e c t i o n wi t h
消 除 阴影 和 高 亮噪声 的双 梯 柱体 码 本 前景 检 测模 型
黄进 ,金炜东 ,秦 娜 ,周艳 ,刘景 波
( 西 南 交 通 大 学 电气 工 程 学 院 , 6 1 0 0 3 1 , 成都 )
摘 要 :为解 决智 能视 觉监 控 中前景检 测存在 阴影和 高 亮噪 声影 响 的 问题 , 提 出一种 双梯 柱 体码 本