基于AMESim的履带起重机行走系统的研究
基于AMESim和MATLAB/GUI的汽车起重机起升机构可视化联合仿真与分析
( 1 . 中 国矿 业 大 学 机 电工 程 学 院 ,江 苏 徐 州 2 2 1 1 1 6 ;
2 . 浙江大学 流体 动力 与机 电系统国家重点实验室 ,浙江 杭州
3 1 0 0 2 7 )
设计 起重 机 可视化 界 面 , 用 户 难 以观测 参 数 设 置 对 起
重机 的影 响 ; 文献 [ 5 ] 运用 S o l i d D y n a m i c s和 M A T L A B / S i m u l i n k 对S C A R A机器人进行了运 动学建模和
摘
要: 该文 以汽 车起 重机起 升 机 构 为研 究 对 象 , 首 先利 用 A ME S i m 软 件 建 立 了起 升 机 构 液 压 系统模
型, 然后在 MA T L A B / G U I 中设计 了起 升机 构 可视 化界 面 , 并通 过 编程 实现 了 A M E S i m和 M A T L A B / G U I 的联
件, 对 汽 车起重 机进 行联 合仿 真和 分析 , 能够 有效 提 高
行分 析 时 , 可 以通 过 G U I 界 面观 察参 数 设 置 对起 升 机 构运 动 的影 响 , 相 比于使用 单一 仿真 软件 , 联 合仿 真效
率更 高 。
设 计效 率 , 缩短 设计 周期 , 减 少 研发 成 本 l 2 J 。文 献 [ 3 ]
能, 为辅 助用 户设 计和 分析提供 了理论 基础 。
关键词: 汽车起 重机 ; 起 升机构 ; A ME S i m; MA T L A B / G U I ; 联 合仿 真 中图分 类号 : T H1 3 7 文 献标 志码 : B 文 章编 号 : 1 0 0 0 - 4 8 5 8 ( 2 0 1 3 ) 0 5 - 0 0 9 7 - 0 5
基于AMESim的汽车起重机双向液压锁仿真与优化

马达的选型 [ ] 起重运输 机械 ,0 9 (0 :0— 3 J. 20 , 1 ) 2 2 .
节省其 设 计与 分析研 究 时 间。
1 双 向液压锁 结构 与 工作原 理
图 1为双 向液 压锁 结 构 图 , 以看 到 双 向液 压 锁 可
驶, 并保证 支腿 在行驶 过程 中不会 自由下 落 。为此 , 要
求支 腿液 压缸 收 、 放方 便 , 到位后 应可 靠地 锁 紧 ] 。 目前 国 内支腿 回路 中所 用液 压锁 大部 分为 双 向液 压锁 , 向液压锁 采用 两个 单 向阀 , 垂直 液压 缸上 下 双 把
已十分必 要 , 如能 建立较 为 准确 的虚 拟模 型 , 将会 大大
气 体所 能承受 压力 有 限 , 使整 机 支承 能力有 限 , 很难 满
足起 重重 物 的要求 , 因此 汽 车起 重机 在 进 行 起 重 作业 时必 须放 下支 腿 , 汽车 轮胎 架空 , 让 用支 腿来 保证 整车 有 足够 的支承 力 , 以满足 作业 要求 。同时 , 由于起 重机 作业地 点 经常改 变 , 时 , 须 收 起支 腿 , 轮胎 轮 行 这 必 用
型进行 了优 化 。得 到结论 : 响双 向液 压锁 的主要 因素为 阀芯 阻尼 和弹簧 刚度 。 影
关 键 词 : 车起 重机 ; 向液压锁 ; 汽 双 液压仿 真 ; 化 优 中图分 类号 :H 1 . 文 献标 识码 : 文章 编号 :0 04 5 (0 1 0 -0 3 3 T 2 36 B 10 -8 8 2 1 )40 5 - 0
ah C ia:J n ie, hn u e6—8 2 0 9 —12. ,0 7,9 0
[] 来升, 3 穆希辉 , 马振 书 , 峰坡.全 向侧 面防爆叉 车液压 杜
基于AMESim的轮胎式起重机行走液压系统仿真与优化_韩彗仙
基于A MESi m的轮胎式起重机行走液压系统仿真与优化湖南机电职业技术学院 韩彗仙 三一重工股份有限公司 曹显利摘 要:介绍了AM ES i m软件的主要特点,分析了轮胎式起重机行走系统的工况和对液压系统的性能要求,根据工况要求提出了液压系统的设计方案,应用AM ESi m构建了轮胎式起重机行走液压系统模型,通过模型的制动性能测试和参数优化,得出了轮胎式起重机行走液压系统建模与仿真的结论。
关键词:轮胎式起重机;行走液压系统;仿真;优化Abstrac t:T he paper presents t he m a i n feat ures of AM ESi m so ft wa re and ana lyzes the opera ti ona l cond iti on o f t he rub-ber-tired C rane s trave li ng sy stem and perfo r mance requ i re m ent of the hydrau lic syste m It also offers how t o desi gn the hy-drau lic trave li ng sy stem m eeti ng the crane operationa l require m ent aud how the m ode l fo r the travc li ng syste m is bu ilt by m eans o f AM ESi m The opti m iza ti on resu lts can be obta i ned through braki ng per f o r m ance test and pa rame tr i c op ti m ization K eywords:rubber-tired crane;hydraulic traveli ng syste m;s i m u l ation;opti m i zati on1 引言AM ES i m是由法国I M AG I N E公司开发的一款仿真平台,其主要特点有:(1)多学科协同仿真平台,能对动力、机构、液压、电控、气动、热力学等不同领域的对象进行联合仿真;(2)其提供的模型库基于国际标准的图形符号,易于使用,用户无需有很深的建模能力即可构建较为真实的仿真系统;(3)运用该软件建模与仿真过程分为搭结构、选模型、定参数、运行等步骤,每个步骤都可逐步细化,使仿真系统的复杂程度逐步提高,直到实现满意的运行结果;(4)AMESi m可对仿真系统进行静态和动态性能分析,可提供功能强大的图形分析工具,使仿真结果输出更直观;(5)液压元件设计库和超模块功能可进行模型的2次开发;(6)批处理功能可对仿真系统进行优化设计。
基于AMESim的汽车起重机双向液压锁仿真与优化

液压与气动
53
基于 AMESim 的 汽 车 起重 机 双向 液 压 锁 仿真与 优化
1 张晓波 ,杨 1 璐 ,徐 2 倩 ,曹 1 1 婷 ,魏文澜
Simulation and optimization of car crane two-way hydraulic lock based on AMEsim soft
图3
双向液压锁仿真模型
其优化前后速度与加速度对比曲线如图 5、 图 6。
2011 年第 4 期
液压与气动
3. 3 阀芯质量的影响
55
在调整阀芯质量时, 仿真步长选取 0. 1 kg, 以 0. 1 kg 0. 5 ) 为基准,向上仿真数量 5 个, 即仿真范围为( 0. 1 , kg。从仿真结果可看出阀芯质量对液压缸的伸 缩 量 及 伸缩速度影响并不是 十 分 剧 烈, 液压 缸 伸 缩 速 度 在 阀 芯质量为 0. 1 kg 时速度与加 速 度 波 动 最 小, 此时 伸 缩
图7
弹簧刚度优化前后液压缸伸缩速度
[ 1] 邹建华, . 机 械 工程与自 吴 榕. 液压 锁 技术 现 状分析[J] 2007 , ( 5 ) : 184. 动化, [ 2] 成都科技大学 《液压传 动 及控制 》 编 写 组. 流体 传 动 及控 M] . 成都: 成都] . 北京: 北 高峰. 搬运机械的结构与使用维修[ 1997. 140. 京理工大学出版社, [ 4] IMAGINE S A. AMESim412 User Manual [ M] . 2004. [ 5] 雷天觉. 液压工程手册[ M] . 北京: 机械工业出版社, 2001. [ 6] 成大先. 机械设计手册[ M] . 北京: 化学工业出版社, 2002.
基于AMESim和RecurDyn的履带车转向系统联合仿真分析

和 转 向 系统 的 液 压 系统 ; 通 过 两种 软 件 的对 接 , 实现 履 带 车 转 向 系统 的机 械 一液 压 联 合 仿 真 。运 用 联 合 仿 真 方 法 ,
分析 了履 带车原地转 向时转向液压缸 的液压特性 变化情况。通过试验验证 , 试验 数据与仿 真结果非常接近 ; 表 明联 合仿真模 型的可靠性 , 为后期 系列产品 的设计制造提供 可靠数 据。
AMES i m s o f t wa r e,a c c o r di ng t o t h e wo r ki n g pr i n c i p l e o f s t e e r i ng s y s t e m o f a r t i c ul a t e d t r a c ke d ve hi c l e .I t c a n r e a l i z e c o n— bi n e d me c h a n i c a l — hy dr a u l i c s i mu l a t i o n o f t h e s t e e r i n g s ys t e m O H t hi s p l a t f o r m . Hy d r a ul i c c h a r a c t e r i s t i c s c h a n g e o f s t e e r i n g h y dr a ul i c c y l i nd e r wa s a n a l y z e d a s t he t r a c ke d v e hi c l e p i v o t s t e e r i n g b y t h e c o — s i mu l a t i o n t e c h n o l o g y. Ex p e r i me n t s h o we d
履带式起重机行走机构故障分析及修复
履带式起重机行走机构故障分析及修复履带式起重机是一种依靠履带装置行走的移动式起重机械,依靠其独特的行走机构,使起重机具有带载行驶、接地比压小、爬坡能力强、转弯半径小等特点,行走机构的动态特性,直接影响着履带起重机整车的性能。
在平常的使用中常常出现走行跑偏的现象,使操作起重机的工作效率大打折扣。
为了解决这一问题,本文针对一个故障排查的实例来对整机液压系统进行探讨研究,加以AMESim为平台进行仿真分析,并提出一些日常使用中的建议。
1工作原理该起重机行走液压系统采用双泵、双马达结构,即左、右行走机构各有1个变量泵、1组控制主阀和I个变量马达,各自独立驱动。
以右侧为例:右控制主阀为力士乐MO-5205-00/4M0型电液控制阀。
该阀为四联阀,分别控制右侧履带的行走、主变幅机构、主钩和副钩。
压力油通过右控制主阀的右行走阀片后进入中心回转接头,再通过胶管及快换接头连接到右侧行走变量马达,将动力传递到右侧行走马达。
左侧与右侧相同。
2故障原因分析2.1磨损原因行走机构的机械部件承担自重、作业载荷及运行中的冲击载荷,还要受到砂石、泥水的污染侵蚀,工作条件恶劣,易被磨损。
从行走机构的结构分析,引导轮、支重轮和驱动轮三者的轴线必须和支重轮架的对称中心线重合,该中心线与起重机的半轴轴线垂直,才能保证履带吊直线行走,但驱动轮、托轮、引导轮及支重轮的轮齿磨损,轴承轴套、轴磨损及变形,使驱动轮、引导轮、支重轮与轨链发生啃削,严重时发生履带跑偏、脱轨,进一步加剧这些零部件的磨损,造成恶性循环。
1)土壤、砂石等不利外部环境对磨损的影响。
土壤和砂石对行走机构的影响主要体现在土壤的酸碱度和砂石的硬度、形状上,酸性土壤、带有锐角的碎石、硬度大的砂石等对零部件的腐蚀和磨损较为严重。
2)零部件之间压力及润滑的影响。
在相同材质下,磨损量与作用在零部件上的压力成正比,单位压力越大,磨损量也越大。
因此应尽量避免过大的单位压力。
缺少润滑使零件直接接触,加剧磨损的产生。
基于AMESim的全液压轮胎起重机行走系统仿真与优化
U U o u Ma f . CAO a l Xi n i
( . n n Me h nc l& Elcr a oye h i . C a g h n n4 01 1 C ia 1 Hu a c a ia e t c lP ltc nc i h n s a Hu a 1 5 , hn ;
2 S N ev n ut C . t. h n saH nn4 0 0 ,C ia . A Y H ayId s  ̄ o ,Ld ,C a gh u a 1 1 0 hn )
Ab t a t T e c n i o e u rme t o a ei g s s m f y r u i e lc a e we e a ay e . A c r ig t e ur me t o s r c : h o d t n rq ie n s ft v l y t o d a l wh e r n r n lz d i r n e h c c o d n o r q i e ns f h d a l h e r n , t eta ei g s h meo y r u i r v l g s se w t r i g b d e w sp t o w r y r ui w e lca e h r v l c e fh d a l ta e i y t m i d v n r g a u r a d, te c mp n n  ̄a — c n c n h i i f h o o e tp me tr f rv l gs se w r ee mi e . T e smu a in mo e f r v l g s se o y r u i w e lc a e w sb i a e n AMES e s o a ei y t m e e d tr n d t n h i l t d l a e i y t m f d a l h e r n a u l b s d o o ot n h c t — i a d vr a e t w r d o smu ae t e b a e p r r n e T e smu ain r s l h w t h h n f w i 2 0 / n a d p e - m n i u l s e e ma e t i l t h r k e f ma c . h i lt e u t s o a tw e o s 6 L mi n r s t t s o o s l s r i e e c s5 MP fb a e v le mid e p s in, t e t v l g s s m a r p r p e s r rp r n r k i . u e df r n e i a o r k av d l o i o f t h r e i y t h s p o e r s u e p o e t a d b a e t a n e y me
基于AMESim的QY8A汽车起重机变幅机构仿真与分析

工作 阻力波动分 别与转 子 转速 、刀具切削前角成 反 比,
1 0 0 C MT M 2 0 1 3 . 0 1
西教学区 ( 小寨校区) 2 1 3 信箱( 7 1 0 0 6 4 )
一
流量 . 压力 放大 系数 ,或称弹性系数 。
—
,
Qr
]
—
-
cI /
p j )
鼓负荷 增加见 表 2~表 3 及图 1 1 ~图 l 4 。
2007 .
参考文献
【 1 ]肖宝 山 . 铣刨机铣 削力及铣 削功率 的计算 [ J ] . 工程 机械,
4 结
语
[ 2 ] 赵敏 . 沥 青 路 面 铣 刨 机 作 业 阻 力及 牵 引性 能 的研 究 [ D ] . 两 安 : 长安 大 学 ,2 0 0 3 .
系统的仿真。 仿真结果直观的反映了起重机变幅起升过程中系统的动态特性, 以便进行其优化设计。 关键 词: 汽车起重机 变幅机构 A ME s i m 仿真 建模
汽车起 重 机变 幅系统 主要 是改 变起 重 机 工作 过程 这一 整 套基 本独 立 完整 的液 压 回路结 构 中,平衡 阀安 的幅度 ,来完 成各种不 同的工作状况 。变 幅机构的合理 装在 油缸下部 , 使变 幅油缸平稳下 降, 并防止油缸下沉,
基于AMESim的轮式装载机工作装置建模与仿真研究
( S c h o o l o f Me c h a n i c a l E n g i n e e r i n g a n d A u t o m a t i o n , F u z h o u U n i v e r s i t y , F u z h o u F u j i a n 3 5 0 1 0 8 ,C h i n a )
p r o c e s s e s .On t h i s b a s i s ,a n e w l o a d — s e n s i n g h y d r a u l i c s y s t e m wa s d e s i g n e d f o r t h e wo r k i n g d e v i c e .An d c o mp a r e d s t u d i e s w e r e ma d e b e t w e e n t h e f i x e d d i s p l a c e me n t p u mp s y s t e m a n d t h e l o a d — s e n s i n g h y d r a u l i c s y s t e m.T h e r e s u l t s s h o w t h a t t h e i mp r o v e d l o a d — s e n s i n g
Ab s t r a c t :Ac c o r d i n g t o t h e w o r k i n g me c h a n i s m o f a wh e e l l o a d e r ,a h y d r a u l i c — me c h a n i c a l c o u p l i n g mo d e l f o r t h e wo r k i n g d e v i c e wa s e s t a b l i s h e d wi t h A MES i m .S i mu l a t i o n a b o u t t h e p r e s s u r e a n d l f o w r a t e o f t h e s y s t e m w a s c a r r i e d o u t u n d e r s o me t y p i c a l wo r k i n g
基于AMESim和RecurDyn的履带车转向系统联合仿真分析

基于AMESim和RecurDyn的履带车转向系统联合仿真分析履带车转向系统是指通过对车辆履带进行差速运动以实现转向的一种方式。
其中,AMESim和RecurDyn可以被用于联合仿真分析。
AMESim是一款基于系统动力学理论的多学科仿真软件。
它可以用于建立高度集成的系统模型,包括机械、液压、热、电等方面。
AMESim的仿真代码能够在非常短的时间内执行快速的仿真,并精确地预测系统的动态响应。
RecurDyn则是一款以多体动力学为基础的仿真软件。
RecurDyn建模按照模型的自由度来进行,从而使得模拟结果准确度更高。
同时,RecurDyn也支持封装好的子系统模块,将不同的子系统部分组合在一起,就可以形成一个完整的系统模型。
通过对此两款软件的基本介绍,我们可以得到集成使用AMESim和RecurDyn的履带车转向系统的基本框架。
具体分析如下:首先,根据履带车转向系统的基本工作原理,可以得到系统模型的建模方案。
在这个建模过程中,首先需要考虑的是履带车的运动学模型。
此模型应能够描述履带车行驶过程中的速度、方向变化以及需要控制的转向系统参数。
这一部分的具体建模涉及方程的推导,可以采用MATLAB或Simulink等工具来实现。
接下来,需要建立由AMESim编制的动力学模型。
此模型描述了系统的物理动态行为,如机械运动、传感器输出、力和驱动器输入。
在AMEsim中,需要将此系统分解为各个子系统或组件,例如电动机、输出轴、减速器和传感器等。
此外,还要考虑与系统相连的其他元素,例如电池、控制器和采样器等。
然后,在RecueDyn中,需要创建由AMESim导出的子系统模型。
这个模型包括运动学、动力学和控制元素。
当模型被创建后,可以将其导出为一个单独的模块,并集成到RecurDyn模型中。
ReucrDyn还提供了一个工具箱,用于模拟诸如差速器、转向节和驱动轴等履带车系统的运动。
通过这些工具箱,可以实现对整个系统的仿真分析,以得到实时的物理行为和响应。
《2024年基于AMESim的液压系统建模与仿真技术研究》范文
《基于AMESim的液压系统建模与仿真技术研究》篇一一、引言液压系统在许多工业领域中都扮演着关键的角色,其工作性能直接影响到设备的运行效率和安全性。
随着计算机技术的发展,利用仿真软件对液压系统进行建模与仿真已成为现代设计和研发的重要手段。
AMESim作为一款强大的工程仿真软件,被广泛应用于液压系统的建模与仿真。
本文旨在研究基于AMESim的液压系统建模与仿真技术,以提高液压系统的设计效率和性能。
二、AMESim软件及其在液压系统建模与仿真中的应用AMESim是一款多学科复杂系统建模与仿真软件,广泛应用于机械、液压、控制等多个领域。
在液压系统建模与仿真中,AMESim提供了丰富的液压元件模型和仿真环境,可以方便地构建各种复杂的液压系统模型。
通过AMESim,我们可以对液压系统的动态特性进行深入分析,优化系统设计,提高系统的性能和效率。
三、基于AMESim的液压系统建模基于AMESim的液压系统建模主要包括以下几个步骤:1. 确定液压系统的结构和功能。
根据实际需求,确定液压系统的基本结构和需要实现的功能。
2. 选择合适的元件模型。
在AMESim中,有丰富的液压元件模型可供选择,如液压泵、液压缸、阀等。
根据实际需求,选择合适的元件模型。
3. 建立液压系统模型。
在AMESim的建模环境中,根据选定的元件模型和系统结构,建立液压系统的模型。
4. 设置仿真参数。
根据实际需求,设置仿真参数,如仿真时间、步长等。
四、基于AMESim的液压系统仿真在建立好液压系统模型后,可以进行仿真分析。
AMESim提供了丰富的仿真工具和分析方法,可以对液压系统的动态特性进行深入分析。
具体步骤如下:1. 运行仿真。
在AMESim中运行仿真,观察系统的输出和性能。
2. 分析仿真结果。
根据仿真结果,分析系统的动态特性、稳定性等性能指标。
3. 优化设计。
根据分析结果,对系统设计进行优化,提高系统的性能和效率。
五、实例分析以某液压挖掘机为例,采用AMESim进行液压系统建模与仿真。
基于AMESim的挖掘机主泵控制系统研究
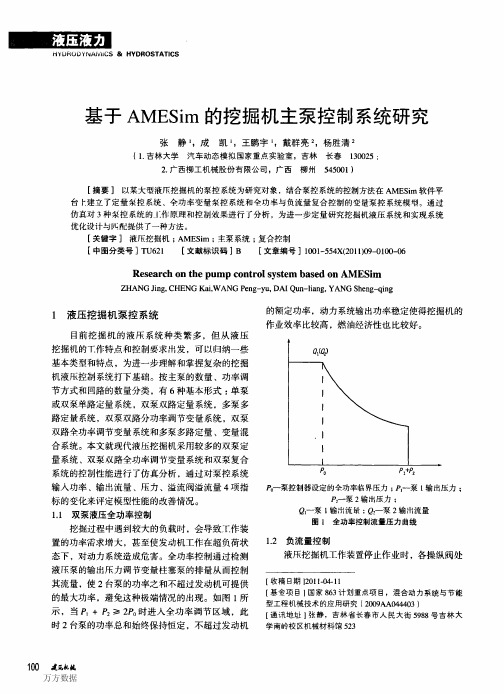
1.2负流量控制
液压挖掘机工作装置停止作业时,各操纵阀处
【收稿日期12011-04.11 【基金项目】国家863计划重点项目,混合动力系统与节能 型工程机械技术的应用研究(2009AA044403) 【通讯地址】张静,吉林省长春市人民大街5988号吉林大 学南岭校区机械材料馆523
图8定量泵系统功率输入曲线
2.2双泵全功率控制系统 由以上结果可知双泵系统的功率需求不稳定, 12—14s功率输入为平均功率输入的1.5倍左右,容
图6双泵定量控制系统模型 表1定量系统参数设置
易造成动力系统超载,同时系统也存在很大的溢流 损失,为改善以上不足,本文建立双泵全功率控制 的变量系统,如图9所示。
Research
[文献标识码]B
on
[文章编号]1001—554X(201 1)09—0100—06
on
the pump control system based Kai,WANG
Peng-yu,DAI
AMESim
Sheng-qing
ZHANG Jing,CHENG
Qun-liang,YANG
1液压挖掘机泵控系统
Automation in ConsWacfion,2003(12):725-735.
[10]Ha Q.P.,Nguyen Q.H.,Rye D.C.,Durraut-Whyte
Impendanee control of
a
H.F.
hydraulically actuated robotic
仿真结果说明: (1)定量系统中12~13s液压系统负荷过大 时,发动机掉速,而全功率系统可以通过反馈压力 P.+Pz减小泵输出流量,使功率需求恒定不超过发 动机的最大输出功率以避免动力系统超载。 (2)全功率系统使泵的工作点更加稳定,系 统需求功率输入更加平稳,可以通过控制器调节发 动机工作点,使之工作在高效区,同时也能够满足 液压系统的功率需求。 (3)泵输出油液通过操纵阀阀杆的控制将油 分成两部分:一部分去液压缸或液压马达,是有效 流量;另一部分通过阀中位回油道回油箱。为无效 流量,负流量控制可以有效地减小这部分流量。 (4)全功率泵控系统加入负流量控制后,溢 流阀的溢流量减小,泵的输出流量也明显减少。负 流量控铜通过减少这部分流量降低液压系统功率需 求,使泵与液压系统功率更好地匹配,提高了系统
基于AMESim软件汽车起重机起升液压系统动态性能仿真分析

《现代流体传动与控制》课程论文论文题目:基于AMESim软件汽车起重机起升液压系统动态性能仿真分析所在学院:汽车工程学院所学专业:车辆工程作者姓名:作者学号:2017年 6 月基于AMESim软件的汽车起重机起升液压系统动态性能仿真分析摘要:汽车起重机已经是一种应用十分广泛的行走式起重设备,具有转移速度快,起重量大,机动性好的优点。
随着社会的发展,人们对汽车起重机起升液压系统的性能要求越来越高。
因此,在设计系统的要考虑到设计的合理性。
目前国内汽车起重机液压系统的设计和各个元器件的选择式按静态性能进行分析理论计算,以及利用设计人员的经验,所设计的系统需要等到产品成型之后再经过测试才能清除动态使用性能的好坏。
如果设计不合理,动态性能不够理想,这将增加研发成本,增加风险发生的几率。
所以在设计完成之后,要采用计算机仿真技术对其进行分析,对系统做出评估,减少损失,提高效率。
本文主要以汽车起重机的起升系统作为研究对象,利用AMESim仿真软件深入分析起升系统的动态特性。
关键字:汽车起重机起重系统 AMESim软件仿真分析Abstract: The truck crane had been a very wide range of walking lifting equipment with the high transfer speed, large carrying weight, good mobility. With the development of society, the demands for crane lifting hydraulic system performance are getting greater. Therefore, when design system have to take reasonable into account. At present, the design of hydraulic system of domestic automobile crane and the selection of various components are calculated according to the static performance or based on the experience of the designer, the designed system needs to be detected until the product molded. If the product were unreasonable, it will increase the risk and cost. So, after design, using computer simulation to analyze the system and making an assessment to reduce losses and improve efficiency. In this paper, the hoisting system of automobile crane is taken as the research object, and the dynamic characteristics of hoisting system are analyzed by AMESim simulation software.Keyword: Truck crane lifting system AMESim simulation analysis一、起重机液压系统发展现状目前汽车起重机普遍采用液压传动,相比于机械传动和店里传动,具有明显的优势:液压传动装置体积小、质量轻;能够获得更大的传动比和实现更大范围内的无级调速,所需成本也不高;各个元件可以自行润滑。
基于AMESim的全液压轮胎起重机行走系统仿真与优化

2010年5月第38卷第10期机床与液压MACH I N E T OOL &HY DRAUL I CSMay 2010Vol 138No 110DO I:10.3969/j 1issn 11001-3881120101101019收稿日期:2009-04-20作者简介:刘茂福(1964—),男,副教授,研究方向为机械制造技术、高职教育。
E -mail:l m aof@1631com 。
基于A MESim 的全液压轮胎起重机行走系统仿真与优化刘茂福1,曹显利2(11湖南机电职业技术学院,湖南长沙410151;21三一重工股份有限公司,湖南长沙410100)摘要:分析全液压轮胎起重机行走系统的工况要求,根据全液压轮胎起重机的工况要求提出行走系统采用液压传动系统+驱动桥的传动方案和元件参数,并采用AMESi m 仿真平台构建了全液压轮胎起重机行走驱动系统机械-液压-控制系统模型,通过对模型的制动性能进行虚拟测试和参数优化,得出了全液压轮胎起重机行走液压系统制动阀中位流量为260L /m in 、压差为5MPa 时具有合适的压力特性和制动时间的结论。
关键词:AMESi m ;全液压轮胎起重机;行走系统;仿真;优化中图分类号:T B24 文献标识码:B 文章编号:1001-3881(2010)10-055-2S i m ul a ti on and O pti m i za ti on of Hydrauli c W heelCrane Traveli n g Syste m Ba sed on AM ES i mL I U Maofu 1,CAO Xianli2(11Hunan Mechanical &Electrical Polytechnic,Changsha Hunan 410151,China;21S ANY Heavy I ndustry Co 1,L td 1,Changsha Hunan 410100,China )Abstract:The conditi on require ments of traveling syste m of hydraulic wheel crane were analyzed .According t o requirements of hydraulic wheel crane,the traveling sche me of hydraulic traveling syste m with driving bridge was put f or ward,the component parame 2ters of traveling system were deter m ined .The si m ulati on model of traveling syste m of hydraulic wheel crane was built based on AMES 2i m and virtual tests were made t o si m ulate the brake perf or mance .The si m ulati on results show taht when fl ow is 260L /m in and p res 2sure difference is 5MPa of brake valve m iddle positi on,the traveling syste m has p r oper p ressure p r operty and brake ti m e .Keywords:AM ESi m ;Hydraulic wheel crane;Traveling syste m;Si m ulati on;Op ti m izati on AMESi m 是法国I M AGI N E 公司开发的一款多学科仿真平台,AMESi m 提供了一个系统工程设计的完整平台,使得用户可以在一个平台上建立复杂的多学科领域系统的模型,并在此基础上进行仿真计算和深入的分析。
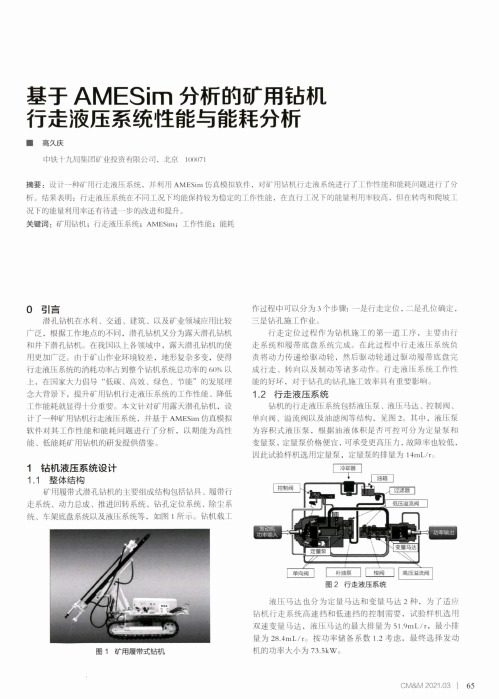
基于AMESim分析的矿用钻机行走液压系统性能与能耗分析
% /
r / m m 时 ,能 量 利 用 率 为 3 7 % 。在爬坡工况下钻机的能量利 用 率 不 足 4〇%。这 主 要 是 因 为 在 爬 坡 工 况 下 ,负载变化情 况 复 杂 ,液压系统压力波动较大,造成能耗较高。
阱 旺 届 W 缒
转速 / (r/min)
3 直行工况
o ^ o i i
液压缸 类型
摆动缸 升降缸 俯仰缸 调平缸 补偿缸 推进缸
表 1 液压缸模型参数
活塞直径
/mm
11C 125 100 100 80 80
活塞杆直径
/mm
60 65 65 55 50 55
最大位移
/mm
725 545 775 160 1220 1605
活塞折算质量
/kg
42 34 48 15 60 85
0 引言
潜孔钻机在水利、交 通 、建 筑 、以及矿业领域应用比较 广 泛 ,根据工作地点的不同,潜孔钻机又分为露天潜孔钻机 和 井 下 潜 孔 钻 机 。在 我 国 以 上 各 领 域 中 ,露天潜孔钻机的使 用更加广泛。 由于矿山作业环境较差,地形复杂多变,使得 行走液压系统的消耗功率占到整个钻机系统总功率的6 0 % 以 上 ,在 国 家 大 力 倡 导 “低 碳 、高 效 、绿 色 、节能”的发展理 念 大 背 景 下 ,提 升 矿 用 钻 机 行 走 液 压 系 统 的 工 作 性 能 、降低 工 作 能 耗 就 显 得 十 分 重 要 。本 文 针 对 矿 用 露 天 潜 孔 钻 机 ,设 计了一种矿用钻机行走液压系统,并 基 于 AMESim仿真模拟 软 件 对 其 工 作 性 能 和 能 耗 问 题 进 行 了 分 析 ,以期能为 高性 能 、低能耗矿用钻机的研发提供借鉴。
基于AMESim的起重机支腿机构液压系统优化与仿真

基于AMESim的起重机支腿机构液压系统优化与仿真
宋磊;郑凯
【期刊名称】《机械制造与自动化》
【年(卷),期】2024(53)1
【摘要】以提高起重机支腿机构的稳定性为目标,设计一种起重机支腿机构PID控制系统。
阐述起重机支腿机构的基本结构与参数,利用FLuidSIM软件完成起重机支腿机构的液压系统设计并进行仿真;在FLuidSIM仿真分析的基础上进行PID控制环节的优化设计;利用AMESim绘制具有PID控制环节的控制系统仿真模型并进行PID控制系统的仿真分析。
结果表明:该PID控制系统提高了起重机支腿机构的同步精度与运行稳定性。
【总页数】4页(P157-160)
【作者】宋磊;郑凯
【作者单位】西安交通工程学院
【正文语种】中文
【中图分类】TH21
【相关文献】
1.基于AMESim-ADAMS联合仿真的高铁救援起重机支腿系统均载特性研究
2.基于 AMESim 仿真平台的塔式起重机液压驱动起升机构动载仿真
3.基于AMESim 的随车起重运输车支腿垂直液压缸回路仿真研究
4.液压支腿机械液压联合仿真分析——基于ADAMS与AMESim
5.基于AMESim的65吨汽车起重机支腿液压系统设计与仿真
因版权原因,仅展示原文概要,查看原文内容请购买。
基于AMESim的桥梁主缆检查车两履带行走液压同步控制研究
基于AMESim的桥梁主缆检查车两履带行走液压同步控制研究司癸卯;王杨煦;王彤;陈哲;付云宝【摘要】设计了一种具有双履带液压行走系统的桥梁主缆检查车,阐述了其工作原理,提出了双泵双马达同步控制的方案,对系统的主要液压元件进行了选型.在作业过程中可能碰到的3种工况下,分别对双泵双马达同步控制系统进行AMESim仿真分析,对加入PID控制器和无PID控制器2种控制方案进行对比.结果表明,PID控制器不仅提高了泵控马达系统的动态性能,而且还减少了同步位移误差问题,使同步控制效果更显著,满足了设计要求.【期刊名称】《建筑机械(上半月)》【年(卷),期】2017(000)007【总页数】5页(P53-56,59)【关键词】桥梁主缆检查车;双泵双马达同步控制系统;AMESim仿真;PID控制【作者】司癸卯;王杨煦;王彤;陈哲;付云宝【作者单位】长安大学道路施工技术与装备教育部重点实验室,陕西西安710064;长安大学道路施工技术与装备教育部重点实验室,陕西西安710064;长安大学道路施工技术与装备教育部重点实验室,陕西西安710064;长安大学道路施工技术与装备教育部重点实验室,陕西西安710064;长安大学道路施工技术与装备教育部重点实验室,陕西西安710064【正文语种】中文【中图分类】U445.7;U469.6因外部环境的变化以及交通的日益繁重,悬索桥主缆吊索系统(简称“缆索系统”)在通车后随着时间的推移会逐渐受到破坏。
缆索系统的腐蚀失效会导致非常严重的工程事故,不仅影响悬索桥的正常通行功能,同时也给人民财产带来巨大损失。
对悬索桥的主缆进行日常维护与保修是保证悬索桥主缆能够长期安全运行的一项重要措施[1,2],必须了解悬索桥主缆检测的工作程序、检测项目及检测方法,加强对悬索桥主缆日常维护与检测的重视,以提高悬索桥的使用安全性能。
本文研究的桥梁主缆检查车的作用是对悬索桥进行日常的维护检测,如图1所示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
EN GN EER I NG, 2001 ,45.
6 ]Mi l l e r R . W. R o l l e r c o mp a c t i o n t e c h n o l o g y [ J ] . Ha n d b o o k o f 可通 过 合理 的钢轮 赢径和 匹 合理 的 激振 器 忠绪 编著. 工程 机做理论【 M] . 西安 : 人民交通 …版
社 2 0 0 4 .
[ 3 ] 刘丹杰. 双{ 4 】 9 轮振动压路机性能的探讨 [ D ] . 长安大学. 【 4 】 魏文澜. 振 动 压 路 机 振动 轮振 幅的 探 讨 [ D ] 长 安大学. [ 5 ]S z e n t e V . , Ho s C . 等. Ga s d y n a mi c p i p e f l o w e f f e c t s i n
: 机 传 动 系 统 …柴 汕 机 系 统 、 液 J 他 动
征压 实 质量 的前 提 下,且在 综 合考 虑效 率和 经 济性 的 前提下,合理 考虑以 影响因素,我们可 以通 过合理 匹 配马 达惯 量与减 速器 的速 比来抑 制 当量惯 性 质 量 ,包 质量来抑 制,从 而间接 减小了瞬时惯性 负荷 引起的压 力 冲击、发动机 速度 波动 ,提高 了机 器的可靠性 。
摘 要: 对履带 起重机动 力系统 构成及发动机 走系统的液 理并结合现场
原理 进行 了荆述, 分忻 r负载敏感 系统 的节 能原 , 给… _ r
进行 了测试 , 结 合测 试结 果分析 J , 行走熄火原因, 为动 力系统匹配提供 J 依据 。
动 力 系统 匹 配
关键 词: 辟 建 带 起 重 机 发 动 机
参考 文献
[ 1 ] 唐 红 彩, 刘龙, 沈 建 军. 单钢轮压路 f J 【 惯 性 载 荷 的探 讨 [ J 】 . 建
筑机械 .
C 0 1 1 t r o l l e d p n e u 1 3 1 a t i e s Y S t e ms — a s i mu l a t i o n s t u d y [ . I ]
抓斗起 重机 或打桩机 、强 夯机等,实现一机多用,进行 机 的智 能化节 能 技术 的研 究基 本上 足 空 ,
能完 全
t石方、桩] 作业 ,在市政 建设 、桥梁施 工、电力建设、 解 决 腥带 起 重机 在实 际 产 用巾m现的 问题 l i . 2 1  ̄本
油 化工、水 利、水 电等 行 业应用, 泛 。履带 起重机 的 文 对履带 起重 机行 走液压 系统基于 AM E S i m 进 行 仿
基于A M E S i m的 履 带 起 重 机 行 走 系 统 的 研 究
Re s e a r c h o n t h e Tr a v e l i n g S y s t e m o f t h e Cr a wl e r Cr a n e t o Be Ba s e d o n A M ES i m
Dhar n 1 ac e ut i c a l gr a nul a t i on t e chn ol ogy:9 9一 l 50.
[ 7 ] 荚 娥 纳 派 克 公 司编 著. 爪 j 摊 铺[ M] . 北 京: 人 民交 通 …
版社 , 2 0 0 2 1 1 .
豳徐工 机械建设 机械 分公司 佘 钦伟 / Y u Qi n we i 刘 成 ̄ J ¥ / L i u C h e n g q i a n g 柏 见涛/ B a i J i a n t a o 徐f l ¥  ̄ ] ¥ / Xu S h e i l g q i a n g
【 8 J 张兴 旭 . 动压路机减震性能 研究[ D ] 长 安 火 , 2 0 0 8 , 0 5 .
[ 9 ] 杨 向…. } J 7 j 青路面压实过 的 小均勺性 及施 ¨蠡 控制[ D] .
长 安 大学 , 2 0 0 7 、 1 1 .
[ 2 】 沈建军. 双钢轮 路机动态特 性及惯性负荷 的研究[ D ] . K安
履带 起 重 机是行 走依 靠履带 装 置 ,起重 作业部 分 来越人 ,需要 吊运设备 的质量 、体积 和起升高度都越 来
装在 履带底 盘 上 的流动 式 起重 机 ,可以进 行 设 备的起 越大 ,履带 起重 机 的 优越 性 更加 突 出, 市场 容量 迅速 厦、运输 、安装 和拆 卸 等 作业。 履带 起 重机 具 有 可带 上升, 国内 【 程机 械行业兴起 了履带 起重 机的开发热潮。 载行 驶、接 地 比压 小、 转 弯半 径小 、爬坡 能 力大、起 从 世纪九十年代开始,国内部 分高校和 企业,开 重性 能好、可适 应恶劣地 面、吊重作业不需打 支腿 等优 始了工 程 机 械 的 智 能控 制 及节 能 理 论 和 技 术 的 研 究 , 点, 并可借 助增加特种装 置或更换 吊具成 为电磁 起重机 、 已经取得 了较大 的成 绩,仳是,国内直 接针对履带起 重
臂长组合 多、起重性 能好、作业高度和 幅度大、可带 载 真研 究,为解 决行 走发动机熄 火提 供分析依 据。
行驶是其 独有的无与伦比的优 势,具有 其他起重 设备无
法替 代的地位 。
随着 社会 经济 的快 速 发展 ,同家基 础 建设 规 模 越
l 履带起重机 的动力系统构成