一种基于激光传感器的自适应直线提取算法
直线状目标的特征提取方法研究

直线状目标的特征提取方法研究直线状目标的特征提取方法是图像处理和计算机视觉领域的一个重要研究方向。
在这个问题中,我们可以从多个角度来探讨直线状目标的特征提取方法。
首先,我们可以从传统的图像处理方法开始讨论。
传统的特征提取方法包括边缘检测、霍夫变换和直线拟合等。
边缘检测可以帮助我们找到图像中的边缘信息,而霍夫变换可以用来检测直线。
直线拟合则可以通过最小二乘法或者RANSAC等方法来拟合检测到的直线,从而提取直线的特征。
其次,我们可以讨论基于深度学习的特征提取方法。
随着深度学习的发展,卷积神经网络在图像特征提取方面取得了很大的成功。
可以使用卷积神经网络来提取图像中的直线特征,例如利用卷积层来提取图像中的边缘信息,再通过后续的网络结构来检测和拟合直线。
另外,我们还可以讨论基于特征描述子的方法。
例如,可以使用SIFT(尺度不变特征变换)或者SURF(加速稳健特征)等特征描述子来提取图像中的直线特征。
这些方法可以对图像中的局部特征进行描述,并且具有一定的尺度和旋转不变性,适用于直线状目标的特征提取。
此外,还可以讨论基于多传感器融合的特征提取方法。
当图像数据不够丰富或者复杂时,可以考虑融合其他传感器的数据,例如激光雷达或者红外传感器等。
通过融合多种传感器的数据,可以更准确地提取直线状目标的特征。
综上所述,直线状目标的特征提取方法涉及传统图像处理、深度学习、特征描述子以及多传感器融合等多个方面。
不同的方法各有优劣,可以根据具体的应用场景和需求来选择合适的特征提取方法。
希望以上回答能够全面地解答你关于直线状目标特征提取方法的问题。
线激光传感器原理

线激光传感器原理线激光传感器是一种常用于工业、测量和自动控制等领域的高精度测量工具。
通过利用激光束的特性和相关的光学元件,它能够实现非接触式的距离、位移和速度测量,具备许多优势和广泛的应用前景。
线激光传感器原理主要基于三个关键技术:激光发射、光学检测和信息处理。
首先,通过一个高能量的激光器将光转化为窄而密集的光束。
激光的单色性和相干性使其具备了非常高的直线传播特性,这使得激光束可以稳定且准确地传输到目标物体上。
接下来,光学检测单元起着至关重要的作用。
它通常由光电二极管和光学元件组成。
激光束照射到目标物体上后,被该物体所反射、散射或吸收。
此时,光电二极管接收到被目标物体反射的光信号,并将其转换为电信号,然后通过信号线传输给信息处理单元。
信息处理单元对传输的电信号进行放大、滤波和相关处理,以提取出感兴趣的数据。
其中,滤波技术能够有效剔除外界光源的干扰信号,从而保证测量的准确性。
处理单元还可以利用相关算法来计算出目标物体与传感器之间的距离、位移或速度等参数。
值得注意的是,由于激光束的特性和光学元件的精度要求,线激光传感器通常需要较严格的安装和校准过程。
一般来说,应选择合适的位置和角度来安装传感器,以确保激光束与目标物体的正交交叉。
此外,传感器还需要进行精确的校准,以便实现高精度的测量结果。
线激光传感器具备许多优势和应用潜力。
首先,由于采用了非接触式的测量方式,它可以避免传统接触式传感器在测量过程中可能产生的磨损和损坏问题。
其次,线激光传感器具有高精度、高灵敏度和高分辨率等特点,可以实现微小物体的精确测量。
此外,它还具备宽测量范围、快速响应时间和稳定可靠性等优点。
在实际应用中,线激光传感器广泛应用于工业自动化、机器人导航、工艺检测和测量仪器等领域。
例如,在智能制造中,它可以用于检测工件的尺寸、位置和形状等参数,保证生产线的精度和效率。
在移动机器人中,线激光传感器可以实现环境感知和避障功能,提高机器人的导航和路径规划能力。
移动车载激光点云的道路标线自动识别与提取

( i nIfr t nT cnq e nt ueo u vyn n a pn , i n7 05 , hn ) X nomai eh iu s tt f reiga dM p ig X 10 4 C ia a o I i S a
A bsr c t a t:Th e e r h fc e n Li e r s ac o us s o DAR o n lu fr a ura e a q ie r m e c e— b r e mo l p i g s se — L nd p i tco dso o d s f c c u r d fo v hil o n bie ma p n y tm a —
邹晓亮 ,缪 剑 ,郭锐增 ,李星全 ,赵桂 华
( 西安测绘总站 , 陕西 两安 70 5 ) 1 04
摘
要 : 移动车载激光测量 LnM r 对 ad ak系统 获取 的路 面 激 光 点 云数 据进 行 研 究 , 结合 激 光 点 云 的 回 波反 射 率 、 扫
描角, 以及 量 测 距 离等 特 征 信 息 与 道 路 标 线 的 属 性 信 息 , 出 了 一 种 基 于 车 载 激 光 点 云 的 道路 标 线 自动 识 别 与 提
Ma k r .An a t mai o d mak n ee t n a d e t cin meh d i p o o e .C mb n n i u o t r a r i gd t ci n xr t t o s r p s d c o a o o i i g L DAR fa u e f er ,a g ea d dsa c t r so t e r o n l n itn e
提取 算法。从 点云 中提取 道路 标线 , 采用 最小二乘 线性最优 拟合 算法对提取 的标 线点云进 行拟合 , 生成道路 标 线的 C D轮廓 线 , A 实现 道路 标线的 自动化识别 。以移动 车载 L nMa ad r k系统的 Sc i k激光扫描仪 获取 的路 面激光
激光视觉焊缝跟踪中图像二值化处理
激光视觉焊缝跟踪中图像二值化处理申俊琦;胡绳荪;冯胜强【摘要】焊缝图像的二值化处理是实现焊缝视觉跟踪的一个重要环节.针对激光视觉传感焊缝图像,通过最小二乘法建立了Otsu法所选阈值与焊缝激光带区域灰度平均值的直线回归方程,从而得到了焊缝图像二值化处理的最佳阈值.利用该方法对焊缝图像进行二值化处理,并与传统二值化处理方法的结果进行了对比.结果表明,该二值化阈值选取方法可以有效地选取出适合焊缝图像二值化处理的阈值,处理结果良好,更利于后续的焊缝特征点提取.%The binarization processing of seam image is an important step to realizing the vision seam tracking. Aiming at the seam image of laser vision sensing , the linear regression equation of threshold obtained using Otsu method and average gray value of laser region was concluded based on least square method, hence the optimal threshold of seam image binarization was gained. The binarization processing result of the calculated threshold was compared with that of conventional binarization approach. The results show that the suitable threshold of seam image binarization processing can be automatically obtained, and the seam image binarization result is beneficial to the subsequent image feature point extraction.【期刊名称】《天津大学学报》【年(卷),期】2011(044)004【总页数】5页(P308-312)【关键词】激光视觉传感;焊缝图像;二值化处理;Otsu算法【作者】申俊琦;胡绳荪;冯胜强【作者单位】天津大学材料科学与工程学院,天津,300072;天津市现代连接技术重点实验室,天津,300072;天津大学材料科学与工程学院,天津,300072;天津市现代连接技术重点实验室,天津,300072;天津大学材料科学与工程学院,天津,300072;天津市现代连接技术重点实验室,天津,300072【正文语种】中文【中图分类】TG409随着视觉传感器、计算机技术、图像处理算法以及智能控制技术的不断发展,利用光学视觉传感的焊缝跟踪技术也得到了飞速的发展.这一焊缝跟踪技术因其信息直观、与工件无接触、测量精度高和动态响应快等优点得到了国内外焊接研究工作者的关注[1-5].基于视觉传感的焊缝跟踪中,最为基础也最为关键的就是焊缝图像的处理.焊缝图像处理的最终目标就是快速而准确地得到坡口及焊缝的特征信息,在焊缝图像的处理过程中,图像的二值化处理是非常重要的一个环节.为此,笔者将传统Otsu方法与直线拟合相结合的方法引入到焊缝图像的二值化处理中,通过对实际焊缝图像进行处理,证明了该方法的有效性.激光视觉传感焊缝跟踪是目前使用最多的一种主动光视觉焊缝跟踪方法.本研究利用激光视觉传感器对35°单边V形坡口横焊焊缝进行图像采集,焊接母材选用500,mm×300,mm×25,mm的 D32高强度钢,焊缝图像采集系统示意如图1所示.图2为所采集到的经过打底焊后焊缝原始图像.从图 2中可以看出,焊缝原始图像中有部分噪声,并且焊缝图像中表征坡口和焊缝信息的激光带与图像背景的对比度不强,不利于后续处理,所以首先对所采集到的焊缝原始图像进行了滤波去噪和对比度增强,处理后的焊缝图像如图3所示.对于焊缝图像的处理来讲,最终的目的就是要从焊缝图像中提取出真实的焊缝信号,摒弃其他无关的信号.通过滤波去噪和对比度增强,焊缝图像中表征焊缝信息的激光带图像与背景有了较为强烈的对比,但为了提高后续处理的速度以及精度,则希望通过适当的处理使得焊缝图像中激光带信息为唯一信息,而噪声、飞溅等其他无关信息可以全部去除.灰度图像的二值化处理是指将图像中像素点的灰度值设置为 0或 255,也就是说图像中的像素点不是黑色就是白色.而焊缝图像的二值化处理就是通过运算使得焊缝图像(如图 3所示)中激光带区域像素点的灰度值变为 255(或 0),而其他无关区域的灰度值变为0(或255).从本质上讲,0和255这两个像素值分别对应于关闭和打开,也可以记为0和1.式中: g(x ,y)表示经过转换后像素点(x ,y)的灰度值;f(x ,y)表示转换前该像素点的灰度值;T为二值化变换阈值.从式(1)中可以看出,二值化处理的关键就是阈值T的选择.最简单的二值化阈值选择方法就是根据图像的灰度直方图来进行选择.一般来说,对比度比较大图像的灰度直方图中会有明显的双峰,传统的方法是以双峰间的谷底作为二值化的阈值,把图像中大于阈值的像素点灰度值变为 255,小于阈值的像素点灰度值变为 0.图 4为图 3所示焊缝图像的灰度直方图,从图中可以看出有明显的双峰,双峰间谷底的灰度值在85左右,图5是将谷底灰度值85作为变换阈值的二值化处理结果.从图5中可以看出,若将直方图中两个峰值间的谷底灰度值作为阈值,对焊缝图像进行二值化处理,结果并不理想.这主要是由于焊缝图像中表征焊缝信息的激光带的灰度值是非常高的,而其在整个焊缝图像中所占有的面积却较小,这就使得直方图中不能明显地显示出激光带与其相邻区域的灰度变化.查看焊缝图像中所有像素的灰度值可以发现,激光带区域内像素点的灰度值基本在230左右,所以应将该值作为焊缝图像二值化处理的变换阈值.图 6为将阈值设为230后焊缝图像的二值化处理结果.从图 6可以看出,将阈值设为 230后,焊缝图像的二值化处理与阈值为 85时相比,处理效果良好.但由于焊接过程是一个包含了电场、磁场、热场等的复杂过程,这就导致焊缝图像的灰度分布以及激光带区域内像素点的灰度平均值并不相同,所以对不同焊缝图像进行二值化处理时所需设定的阈值也可能不同.如果焊接过程中对每幅焊缝图像都人工选取阈值的话,那显然是不切实际的.这就需要计算机能够针对不同的焊缝图像自适应地选择相应的二值化变换阈值.自动获取二值化变换阈值的方法有很多种,目前应用较为广泛的是 Otsu法.Otsu法又被称作最大类间方差法,是由日本学者Otsu Nobuyuki[6]于1979年首次提出的,它是一种二值化变换阈值的自适应确定方法,一般记为 Otsu法.到目前为止,Otsu法及其改进算法已经广泛地应用到了有关图像二值化处理的许多研究之中[7-10].Otsu法的基本思想是:对于图像的二值化变换阈值,它应该能够将图像分为灰度大小两类,并使得两类中像素点灰度平均值的类间方差最大,满足这个要求的灰度值就是图像的二值化变换阈值.不管图像的直方图中是否存在明显的双峰,Otsu法都可以通过该算法计算选取出一个较合适的变换阈值T,使得分类的类间方差最大,所以该算法是一种选取全局阈值的算法.通过Otsu法对图1所示的焊缝图像进行二值化阈值选取,所得的二值化处理变换阈值T为96.9.可以看出使用Otsu法虽然可以自动地选取二值化处理的变换阈值,但是由于从根本上该算法选取的还是焊缝图像灰度直方图中最为明显的两峰值间的谷底灰度值作为变换阈值,所以得到的阈值并不能有效反映出表征焊缝信息的激光带区域的灰度特点.从前面的分析可知,若将焊缝图像的二值化变换阈值设为激光带区域像素点的灰度平均值,则二值化处理的结果较好.选取经过滤波去噪和对比度增强的25幅焊缝图像,进行Otsu法二值化变换阈值选取,同时利用图像处理软件分别计算这 25幅焊缝图像中激光带区域像素点的灰度平均值,所得的结果如表1所示.将 Otsu法求取的二值化变换阈值设为x,利用最小二乘法对表1所示的两项数据进行直线拟合,拟合后得到两者关系为式(2)中的y′代表利用上述方法进行拟合后所计算出的激光带区域像素点的灰度平均值.图 7为激光带区域像素点平均灰度的实际值与拟合值.利用直线拟合得到的激光带区域像素点灰度平均值与实际值的最大相对误差为4.83%,最小相对误差为0.04%,平均相对误差为 1.60%,这说明利用直线拟合的方法可以实现焊缝图像二值化阈值的小误差确定.利用 Otsu法以及式(2),可以求出图 3所示的焊缝图像二值化变换阈值.图 8为根据计算出的阈值进行焊缝图像二值化处理的结果.从图8中可以看出,使用本文提出的方法对焊缝图像进行二值化处理,处理结果较好,使得表征焊缝信息的激光带图像得到了有效的保留,而其他无关信息基本去除.利用该方法实现焊缝图像的二值化处理时间不超过 50,ms,整个焊缝跟踪中图像处理的总时间不超过350,ms,可以满足焊缝跟踪实时性的要求.图9为针对图8的二值化焊缝图像的最终处理结果,即为坡口及焊缝特征点提取的结果.(1)使用传统的二值化阈值方法并不能有效地选择出适合焊缝图像二值化处理的阈值,并且由于该方法确定的阈值需要人工选取,所以不能满足自动化的要求. (2)使用Otsu法虽然可以自动地选取图像二值化阈值,但是由于算法本身的特点,所以选取出的阈值还不能满足焊缝图像二值化处理的要求.(3)通过最小二乘法,直线拟合出了 Otsu法选取出的阈值与激光带区域像素点灰度平均值的关系,最终得到了适合焊缝图像二值化处理的阈值自适应选取方法,通过对焊缝图像的二值化处理,证明该方法是切实有效的.【相关文献】[1]陈诚,刘鸣,陈兴梧,等. 自动焊接中焊缝检测跟踪系统的研究[J]. 天津大学学报,2003,36(5):567-570.Chen Cheng,Liu Ming,Chen Xingwu,et al. Research of detection and tracking systemof seam in the automatic welding[J]. Journal of Tianjin University,2003,36(5):567-570(in Chinese).[2]Kang Minggoo,Kim Joonhong,Park Youngjun,et ser vision system for automatic seam tracking of stainless steel pipe welding machine[C]// ICCA 2007-International Conference on Control,Automation and Systems. Seoul,Korea,2007:1046-1051.[3]姜建锋,熊震宇,陈焕明. 数字图像处理在焊缝识别中的应用[J]. 南昌航空工业学院学报:自然科学版,2005,19(1):58-61.Jiang Jianfeng,Xiong Zhenyu,Chen Huanming. Application of digital image processingin the weld seam recognition[J]. Journal of Nanchang Institute of Aeronautical Technology:Natural Science,2005,19(1):58-61(in Chinese).[4]Reddy G,Raman A,Reddy H,et al. Laser vision based seam tracking system for welding automation[C]// Proceedings of the 2008 International Conference on Image Processing,Computer Vision and Pattern Recognition,IPCV 2008. Las Vegas,2008:440-445.[5]刘振国,陈志翔. 激光传感图像处理方法研究[J]. 电焊机,2009,39(4):133-137.Liu Zhenguo,Chen Zhixiang. Research on image processing for laser sensing[J]. Electric Welding Machine,2009,39(4):133-137(in Chinese).[6]Otsu Nobuyuki. Threshold selection method from graylevel histograms[J]. IEEE Transactions on Systems,Man and Cybernetics,1979,9(1):62-66.[7]Buxton B,Abdallahi H,Fernandez-Reyes,et al. Development of an extension ofthe Otsu algorithm for multidimensional image segmentation of thin-filmblood[C]//Proceedings of International Conference on Computing:Theory and Applications,ICCTA 2007. Kolkata,2007:552-561.[8]吴世英,虞欣. 基于智能遗传算法和 Otsu法的多目标图像分割算法[J]. 测绘信息与工程,2006,31(4):47-49.Wu Shiying,Yu Xin. An multi-object image segmentation approach based on intelligent genetic algorithm and Otsu algorithm[J]. Journal of Geomatics,2006,31(4):47-49(in Chinese).[9]Zahara E,Fan Shukai,Tsai Duming. Optimal multithresholding using a hybrid optimization approach[J].Pattern Recognition Letters,2005,26(8):1082-1095. [10]Parkinson I H,Badiei A,Fazzalari N L. Variation in segmentation of bone from micro-CT imaging:Implications for quantitative morphometric analysis[J]. Australasian Physical and Engineering Science in Medicine,2008,31(2):160-164.。
激光SLAM自主导航的线段特征提取混合算法研究

264机械设计与制造Machinery Design&Manufacture第5期2021年5月激光SLAM自主导航的线段特征提取混合算法研究桑迪,周军,皇攀凌,李蕾(1.山东大学机械工程学院,山东济南250061;2.山东大学高效洁净机械制造教育部重点实验室,山东济南250061;3•齐鲁工业大学(山东省科学院),机械与汽车工程学院,山东济南250353)摘要:移动机器人在未知环境中自主导航时定位需要精确的地图,同时为了构建精确的地图必须确定机器人的位姿,同时定位与地图构建(SLAM)问题便产生。
基于激光雷达SLAM自主导航算法是研究的方向之一,激光雷达具有测距精度高、测距远等优点,但是由于激光雷达的数据量少、传感器本身噪声的影响,容易导致机器人构建地图精度低、定位误差大等问题。
针对激光雷达的数据测得的距离信息进行线段特征提取算法,通过将常用PDBS、IEPF算法优缺点进行综合,提出了一种混合特征提取算法。
最后通过对SICK的LMS111-10100激光雷达获取环境中的一组数据进行处理,分别对PDBS、IEPF算法及混合算法提取效果与实际环境对比,验证了特征提取混合算法的有效性。
关键词:移动机器人;SLAM;激光雷达;PDBS、IPEF算法;线段特征提取中图分类号:TH16;TP242.2文献标识码:A文章编号:1001-3997(2021)05-0264-05Line Segment Feature Extraction Algorithm for Laser SLAM Autonomous NavigationSANG Di,ZHOU Jun,HUANG Pan-ling,LI Lei(1.School of Mechanical Engineering,Shandong University,Shandong Ji'nan250061,China;2.Key Laboratory of High Efficiency and Clean Mechanical Manufacture,Shandong University,Ministry of Education,Shandong Ji'nan250061,China;3.School of Mechanical and Automotive Engineering,Qilu University of Technology(Shandong Academy of Sciences),Shandong Ji'nan250353,China)Abstract:With the development of key technologies such as mapping,positioning and navigation of mobile robots,mobile robots have been”idely usedfor autonomous navigation in various complex indoor and workshop environments.In autonomous navigation,robot localization in unfamiliar environments requires accurate maps.In order to build accurate maps,it is necessary to know the position and pose of the robot,that is,simultaneous localization and mapping(SLAM).SLAM navigation algorithm based on radar is one of the research directions.Radar has the advantages of high ranging accuracy and long distance.However,due to the less data of radar and the influence of sensor noise,the robot makes mistakes in the process of mapping and positioning.This paper improves the line segment feature extraction algorithm for the range information measured by radar data,and synthesizes the advantages and disadvantages qfthe commonly used PDBS and IEPF algorithms,and proposes a hybrid feature extraction algorithm.A set of data in real environment is acquired and processed through the data of LMS111-10100sensor of SICK.The effectiveness of PDBS,IEPF and hybrid algorithm is verified by comparing with the actual environment.Key Words:Mobile Robot;SLAM;Radar;PDBS;IPEF Algorithm;Line Segment Feature Extraction1引言自主导航作为一种新的导航技术已经广泛应用于移动机器人行业,移动机器人通过所携带的激光、视觉、里程计等传感器,在移动过程中完成构建地图与定位。
基于自适应非线性跟踪微分器的直线电机位置和速度检测方法

第27卷㊀第10期2023年10月㊀电㊀机㊀与㊀控㊀制㊀学㊀报Electri c ㊀Machines ㊀and ㊀Control㊀Vol.27No.10Oct.2023㊀㊀㊀㊀㊀㊀基于自适应非线性跟踪微分器的直线电机位置和速度检测方法周世炯1,2,㊀李耀华1,2,㊀史黎明1,㊀范满义1,㊀张明远1,2,㊀刘进海1,2(1.中国科学院电工研究所中国科学院电力电子与电力驱动重点实验室,北京100190;2.中国科学院大学,北京100049)摘㊀要:为了解决直线电机的位置和速度检测的问题,设计了基于激光器阵列的光栅传感器位置检测系统,提出一种利用非线性跟踪微分器的直线电机速度测量方法,对电机动子位置进行准确跟踪以及对动子的速度进行测量㊂针对传统的非线性跟踪微分器在一定速度下处理测量噪声干扰和相位延迟存在矛盾的问题,设计了一种自适应非线性跟踪微分器,其参数能够跟随电机动子的运动速度自动调整,频率特性分析证明了其良好的微分特性㊂仿真和实验结果均证明了所设计的直线电机光栅位置检测方法和自适应非线性跟踪微分器测速的有效性,在电机运行的全速范围内都能够很好地抑制测量误差以及滤波效应带来的延迟,获得全程精确且快速的电机动子位置信号和速度输出信号㊂关键词:直线电机;光栅传感器;位置和速度检测;自适应参数;非线性跟踪微分器;全速范围DOI :10.15938/j.emc.2023.10.003中图分类号:TM359.4文献标志码:A文章编号:1007-449X(2023)10-0024-10㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀收稿日期:2021-10-30基金项目:中国科学院电工研究所科研基金(2021E1393201)作者简介:周世炯(1995 ),男,博士研究生,研究方向为大功率电力电子变换技术与直线电机驱动控制;李耀华(1966 ),男,博士,研究员,博士生导师,研究方向为电机与控制㊁大功率电力电子变流器;史黎明(1964 ),男,博士,研究员,博士生导师,研究方向为特种电机设计和驱动控制㊁无线电能传输技术;范满义(1988 ),男,博士,助理研究员,研究方向为直线电机驱动控制㊁无线电能传输技术;张明远(1995 ),男,博士,研究方向为大功率电力电子变换技术与直线电机驱动控制;刘进海(1995 ),男,博士研究生,研究方向为大功率电力电子变换技术与直线电机驱动控制㊂通信作者:周世炯Linear motor position and speed measurement method based onadaptive nonlinear tracking differentiatorZHOU Shijiong 1,2,㊀LI Yaohua 1,2,㊀SHI Liming 1,㊀FAN Manyi 1,㊀ZHANG Mingyuan 1,2,㊀LIU Jinhai 1,2(1.Key Laboratory of Power Electronics and Electric Drive,Institute of Electrical Engineering,Chinese Academy ofSciences,Beijing 100190,China;2.University of Chinese Academy of Sciences,Beijing 100049,China)Abstract :To solve the problems of linear motor s position and speed measurement,a grating sensor posi-tioning system based on the laser array is designed,and a linear motor speed measurement method using a nonlinear tracking differentiator is proposed to track the mover position and measure the mover speed.Considering the contradictory problem of the traditional nonlinear tracking differentiator in dealing with measurement noise interference and phase delay at a certain speed,an adaptive nonlinear tracking differ-entiator is designed and its parameters can be adjusted automatically following the speed of the mover.Its good differential characteristic is proved by the frequency characteristic analysis.The effectiveness of the designed linear motor grating positioning method and adaptive nonlinear tracking differentiator for speedmeasurement is proved by both simulation and experimental results.The measurement error and the lagproblem caused by the filtering effect are well suppressed in the full speed range,and the accurate and fast mover position and speed output signals throughout the entire process are obtained. Keywords:linear motor;grating sensor;position and speed measurement;adaptive parameters;nonlin-ear tracking differentiator;full speed range0㊀引㊀言直线电机具有传动机构简单㊁运行效率高㊁动态响应快等优点㊂直线电机在很多场合已经得到了应用,如高速直线电机电磁驱动系统㊁磁悬浮列车㊁直线电机电梯以及工业运用的各种机械传送设备等㊂直线电机的速度闭环是实现电机高精度闭环控制的重要一环,特别是在速度较高㊁运行距离较远的场合,需要精准的直线电机位置和速度检测系统来满足位置和速度控制所需要求㊂随着直线电机的广泛应用,直线电机的位置和速度检测技术在不断发展㊂文献[1]采用相位差光栅涡流传感器进行位置的跟踪,文中提出一种特定的组合码,采用单轨编码定位方法实现光栅涡流传感器线圈的粗定位,但是这种方法只是进行电机位置的粗跟踪,在很多精度要求高的场合不适用㊂文献[2-3]利用图尔克公司的电感式接近开关构成传感器阵列,根据直线感应电机次级感应板运动过程中与传感器的电涡流效应来生成直线感应电机的位置信号,这种方法虽然能够适应十分苛刻的工况,但是测量的精度不高㊂霍尔传感器是一种磁场传感器,检测准确度依赖于霍尔元件离磁场的距离,如果距离太近易受直线电机漏磁场干扰,尤其是在高速电磁驱动强磁场㊁大电流的工况下,位置检测精度并不高[4]㊂文献[5-6]利用了磁栅式的速度传感器,也有一定的抗振和抗干扰能力,且结构较为简单,但是无法适应动子高速运动带来的横向振动,同时这种传感器的磁头容易退磁,因此使用寿命不长㊂文献[7]研究表明激光位移传感器的位置检测精度受测量距离的限制,距离过长导致检测精度下降㊂由于其位置测量信号是连续的,易受周遭环境的影响而存在噪声,会被微分作用放大,淹没速度测量信息㊂文献[8-9]在电机动子上安装高速摄像机,随着动子运动扫描刻在定子两侧的非周期正弦条纹图像,利用特定的算法将二维图像转化成简单的一维信号处理,快速㊁高精度地解码出速度与位置,同样这种方法也不适合高速运动的直线电机带来的抖振㊂而基于直线光栅传感器的位置检测方法简单有效,成本低,不受长行程㊁强磁场限制,测量精确度较高[10],特别适用于长定子直线电机㊂但是在高速大推力的电磁驱动工况下,光栅传感器的机械强度受到考验,且所用激光的光斑大小会限制光栅的栅格宽度[11],光栅格的设计往往相对于精密伺服系统设计的要宽,因此不能单纯的从减小光栅的栅格宽度来提高位置检测的精度,有必要从检测位置和速度的算法上着手㊂速度信号常由对位置信号的微分获得,普通的微分处理主要是采用差分方法,极易因为测量误差而对噪声进行放大作用,获得的速度信号误差大而无法采用㊂针对这个问题,韩京清等[12]提出跟踪微分器(tracking differentiator,TD),不直接对输入信号进行微分运算,而是先对给定输入信号进行跟踪,随后对跟踪信号处理并输出微分信号,这样可以有效抑制微分的噪声放大效应㊂文献[13]又在此基础上根据最优控制原理设计了基于离散最速控制函数的非线性跟踪微分器(nonlinear tracking differentia-tor,NL-TD),进一步抑制了测量噪声,且有效降低了信号延迟,使得跟踪信号总能在有效的最短步长内跟上给定信号㊂但是,根据文献[14]发现,传统控制参数固定的NL-TD输出信号的精确性会因为输入信号的变化速度而发生改变:速度较低时,会有较大的测量误差,延迟较小;随着速度升高,误差减小,但输出信号延迟越来越明显㊂因此,低速时需要提高微分器的滤波因子来改善,但很可能会造成输出信号延迟;高速时需要提高速度因子加快信号跟踪,但很可能会造成测量误差增大㊂因此,这种微分器在同时处理测量误差和输出延迟问题上存在矛盾,想要在被测目标运动的全过程都能够较为准确快速地测量比较困难㊂目前解决的方法主要分为两大类,第一类主要是从NL-TD的可调控制参数着手,如文献[15]提出通过获得输入输出信号差值构造自适应函数控制速度因子,随着被测目标速度增大而增大,使得微分器的跟踪速度能够满足要求,但是未考虑滤波作用,易受噪声影响㊂文献[16]提出速度因子和滤波因子都能跟随输入信号的变化速率自适应调整的改进型52第10期周世炯等:基于自适应非线性跟踪微分器的直线电机位置和速度检测方法微分器,很好地解决了上述矛盾,但是由于其用到了复杂的统计学函数而不利于实现㊂第二类则是从NL-TD本身的控制函数着手,文献[17]利用二阶连续系统最速控制设计中的综合函数,提出一种新型快速离散非线性跟踪微分器,经分析表明,这种跟踪微分器在良好跟踪输入信号的前提下,可较好地滤除噪声提取微分信号,且相位延迟小㊂文献[18-19]重新设计了一种基于边界特征线且特征点可变的二阶离散非线性跟踪微分器,并且运用在磁悬浮列车的位置和速度检测系统当中㊂文献[20]采用反双曲正弦函数离散化得到二阶微分器,严格证明了所设计的微分器具有良好的跟踪性能,但仅仅局限于仿真阶段㊂此外,第二类方法采用更为复杂的控制函数设计跟踪微分器,因此实用性不强㊂本文采用第一类方法,设计了自适应非线性跟踪微分器(adaptive nonlinear tracking differentiator,ANL-TD),采用相对简单的自适应控制函数,拟合速度因子和滤波因子的变化规律,并将其应用于长定子直线电机的位置和速度检测系统中㊂本文利用基于激光器阵列的光栅传感器位置和速度检测系统具有精度高㊁检测速度快㊁设计相对简单经济且不受电磁干扰的优点,经过仿真和实验证明,在电机加速㊁匀速和减速的全过程中,与传统的NL-TD相比,本文提出的ANL-TD都能很好地对直线电机的动子进行位置和速度的检测,测量误差小且延迟低㊂1㊀光栅传感器位置速度检测系统图1给出了利用基于激光器阵列的光栅传感器进行位置和速度检测的系统㊂由于定子长度较长,供电和控制系统都固定在地面上,将激光器阵列安装于定子上,光栅条安装于动子上,这种简单的传感器形式能较为方便地重构出电机动子的位移,并作为跟踪微分器的信号输入,随后跟踪微分器经计算输出动子更平滑的位置跟踪信号和速度测量信号,作为电机控制的反馈信号输入㊂光栅条安装在动子板上(图1中简化了动子,以光栅条代替),激光收发器阵列安装在定子上,如图1中所示的灰色部分㊂光栅条分为白色透光区域和黑色不透光区域(宽度等长,均设为D),当动子产生位移时,光栅条就会遮挡或者不遮挡激光,对应的每对激光收发器会得到一系列高低电平的变化,经信号处理模块产生对应的脉冲序列㊂计数模块能够对每列脉冲进行计数(跳变沿计数得到的脉冲数设为N),累加(ND得到动子的位移粗信号)并经过线性插值得到位移输入信号(如图2所示),通过下文设计的非线性跟踪微分器跟踪输出得到电机动子平滑的位置信号和速度信号㊂最后,根据具体情况在不同时刻都选通输出某一对激光器得到的电机动子位置和速度信号作为最终信号输出㊂图1㊀光栅传感器位置和速度的检测系统结构Fig.1㊀Structure of the grating sensor speed and posi-tion measurementsystem图2㊀位置线性插值Fig.2㊀Position linear interpolation图2中:X1为光栅传感器位置和速度的检测系统重构出的位置(X1=ND);X2为对X1进行插值得到的位置信号,X2作为跟踪微分器的位移输入信号㊂如果直接采用光栅传感器输出的位置X1作为电机控制的位置反馈信号输入,如图2所示带有明显的阶梯形状会对控制系统造成额外的影响㊂2㊀自适应非线性跟踪微分器2.1㊀非线性跟踪微分器原理根据文献[21],经典的微分作用通过下式实现:y=s Ts+1u=1T(1-1Ts+1)u㊂(1)式中:u为输入信号;T为惯性环节的时间常数,若T 越小,则使微分信号y(t)越接近u㊃(t)㊂但是当输入信号中混入噪声时,y(t)中会存在与T成反比的62电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第27卷㊀噪声放大信号,不利于对电机动子速度的测量㊂为了解决微分放大噪声的影响,文中还提出通过减少积分的步长来抑制噪声的方法,但是需要较长的调节时间进入稳态㊂为了加快进入稳态的时间,出现了跟踪微分器的概念[22],跟踪微分器是对经典微分器的高阶扩展㊂跟踪微分器一方面能够利用其中的惯性环节来跟踪输入信号,另一方面能够通过求解微分方程来输出微分信号㊂但是,这种跟踪微分器跟踪信号的能力依然有限㊂为了使微分器能够快速地跟踪输入信号,文献[23]将最优快速控制综合函数代入二阶积分串联型系统并且经过离散化得到非线性跟踪微分器㊂当跟踪点远离目标点时,非线性结构的控制函数能够使其以幂级数的曲线轨迹快速逼近,而当跟踪点靠近目标点时,它又能以一次函数的轨迹以较低的速度缓慢接近目标,因此,相比于传统的跟踪微分器,NL-TD 的跟踪信号能力和抑制噪声的效果都比较好,即NL-TD 的效率要高于传统的跟踪微分器[24]㊂NL-TD 的表达式为:x ㊃1=x 2;x ㊃2=u ,|u |ɤr ㊂}(2)式中:u 为控制输入的函数;r 为常数㊂而实际中应用更多的是NL-TD 的离散形式,表达式为:x 1(k +1)=x 1(k )+Tx 2(k );x 2(k +1)=x 2(k )+T fhan(x 1(k )-u (k ),x 2(k ),r ,h )㊂üþýïïï(3)d =rh ;d 0=hd ;y =x 1-u +hx 2;a 0=d 2+8r |y |;a =x 2+y h ,|y |ɤd 0;x 2+0.5(a 0-d )sgn(y ),|y |>d 0㊂{fhan =-r sgn(a ),|a |>d ;-r a d,|a |ɤd ㊂{üþýïïïïïïïïïïïïïï(4)式中:u (k )为位置输入信号;x 1(k )为对u (k )的跟踪信号;x 2(k )为对x 1(k )的微分信号,当x 1(k )能够快速跟踪u (k )时,x 2(k )便可以作为u (k )的近似微分,最后输出信号x 1(k )作为系统的位置信号,输出信号x 2(k )作为系统的速度信号;T 为微分器离散化步长;r 为速度因子,增大r 可以更快地跟踪输入信号;h 为滤波因子,增大h 可以更好地滤除噪声;fhan(x 1,x 2,r ,h )为离散最优快速控制综合函数[25]㊂由式(3)和式(4)可以看出,NL-TD 只需调节速度因子r 和滤波因子h 两个参数,调节简单㊂2.2㊀自适应设计当采用一组固定的速度因子r 和滤波因子h 参数时,在测量目标的移动速度较低时,NL-TD 输出的速度微分信号x 2(k )误差较大,位置跟踪信号x 1(k )的滞后相对较小;随着目标移动速度的不断增大,速度微分信号x 2(k )的误差越来越小,而位置跟踪信号x 1(k )的滞后越来越明显[14,16]㊂为了解决NL-TD 存在的问题,需要根据输入信号的情况实时调整速度因子r 和滤波因子h 的值㊂因此提出自适应非线性跟踪微分器,使非线性跟踪微分器的两个可调参数r 和h 跟随测量目标运动速度而改变,即r =r (v )和h =h (v ),其中r (v )跟随目标移动速度v 成正比变化,h (v )跟随目标移动速度v 成反比变化㊂根据以上分析,被测目标速度较低时速度因子取较小值,滤波因子取较大值;速度升高时,速度因子能够快速增大以便能够快速跟踪输入信号,并且速度较低时较大的滤波因子能够减小噪声㊂如此,ANL-TD 在高㊁低速时都可以输出高精度㊁低延时的跟踪信号x 1(k )和微分信号x 2(k )㊂文献[14]根据统计学的原理提出自适应律,函数结构显得复杂,为了简化系统运算,节省硬件逻辑资源,本文重新提出可调参数的自适应规律,表达式为:α(x )=arctan(xγ1);β(x )=e -(x γ2)2㊂üþýïïï(5)式中:α(x )随x 的增大而快速增大;β(x )随x 的增大快速减小;γ1和γ2为可调参数,调整他们的大小可以改变α(x )和β(x )的变化速率㊂α(x )由简单的反正切函数所得,β(x )由标准正态分布简化而得㊂利用α(x )和β(x )拟合速度因子r 和滤波因子h 的变化㊂经设计,自适应非线性跟踪微分器的形式变为:x 1(k +1)=x 1(k )+Tx 2(k );x 2(k +1)=x 2(k )+T fhan(x 1(k )-u (k ),x 2(k ),r (x 2),h (x 2))㊂üþýïïï(6)72第10期周世炯等:基于自适应非线性跟踪微分器的直线电机位置和速度检测方法其中:r =α(x 2,γ1)=A arctan(x 2γ1)+B ;h =β(x 2,γ2)=1γ2e -12(x 2γ2)2㊂üþýïïïï式(6)中A 和B 分别为速度因子r 的变化范围和初始值㊂根据系统实际要求的输入信号的带宽,调节γ1和γ2的大小,使ANL-TD 获得全程精确且快速的输出信号㊂2.3㊀频率特性ANL-TD 的跟踪信号和抑制噪声的能力能够通过系统的开环频率特性反映,由于是非线性的环节,无法常规获取伯德图,本文采用扫频法[26]㊂假设正弦输入信号为y =A sin(ωt +Φ),在输入信号的某一个周期内选取对应的输出信号的最大值A (ω)和其对应的时间t ,计算获得输出信号的幅值和相位㊂这样,通过改变频率便可以得到输出信号的一系列不同的幅值和相位,得到输出信号近似的幅频㊁相频信号[26]㊂ANL-TD 的频域特性已用MATLAB 绘制而出,如图3所示㊂图3㊀ANL-TD 伯德图Fig.3㊀ANL-TD Bode diagram图3中,保持γ1的值不变,改变γ2的值分别得到ANL-TD1㊁ANL-TD2㊁ANL-TD3的曲线㊂代表常规微分作用s 的幅频和相频曲线也在图中给出作为参考㊂对于正弦输入信号,改变γ1的值只决定跟踪信号能否跟上输入信号变化,对ANL-TD 输出信号的频率响应没有影响㊂从幅频曲线可以看出,幅频特性近似于一条折线,在高频处的最高点(称为转折频率)出现转折,所以该跟踪微分器可以有效地滤除高频噪声㊂从相频曲线可以看出,在转折频率之前一段区间内几乎保持超前90ʎ的相角,且在转折频率之后快速降低至-90ʎ,所以该跟踪微分器在一定范围内具有良好的微分作用㊂因此,ANL-TD 的频率特性类似于二阶带通滤波器㊂对比常微分s 的频率特性曲线,ANL-TD 在一定的频带范围内能够表现出良好的近似微分的作用,并且能够有效地抑制高频噪声㊂除此之外,ANL-TD1㊁ANL-TD2㊁ANL-TD3对应的参数γ2满足条件:γ21<γ22<γ32㊂可以发现,增大γ2的值可以增加通频带的范围㊂3㊀仿真结果分析为了验证新设计的ANL-TD(见式(6))的效果,本文取动子的参考速度V ref (m /s)㊂首先动子速度由0以50m /s 2的加速度匀加速至100m /s,随后匀速运行1s,然后又以50m /s 2的加速度匀减速至0,如图4所示㊂图4㊀动子运动参考速度Fig.4㊀Reference speed of mover图5为基于跟踪微分器位置和速度检测方法的结构框图㊂由图可知,输入速度参考信号V ref 经过积分得到位置输入信号X 1,模拟光栅传感器每1e -4s更新一次数据得到离散位置信号,并以5e -9s 的周期线性插值之后输出位置信号X 2㊂图5㊀跟踪微分器的位置和速度检测方法结构框图Fig.5㊀Block diagram of the position and speed detec-tion method of the tracking differentiator82电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第27卷㊀X 2作为跟踪微分器ANL-TD 的输入,利用传统跟踪微分器得到低质量的微分速度信号,经过自适应控制函数得到随速度输入信号变化的速度因子和滤波因子,从而有效地调节ANL-TD(式(6)所示),在目标物体高㊁低速运动时都可以保持比传统的NL-TD 更加精确的输出信号㊂X 2经傅里叶分析如图6所示㊂图6㊀输入位置信号傅里叶分析Fig.6㊀Fourier analysis of input position signal根据图6,该输入位置信号频谱的主要成分大致集中在2Hz 以内,通过上节对跟踪微分器的频率特性分析,可以选择合适的参数来使得ANL-TD 对该输入信号具有良好的微分作用,这里γ1和γ2分别取10和110较为合适㊂根据式(6),经过调试取A =1e 6,B =2e 6,T =1e -4s,由ANL-TD 得到的位置跟踪信号及速度输出信号,相比于传统的NL-TD 更加精确㊂位置㊁速度㊁自适应控制函数r =α(x 2,γ1),h =β(x 2,γ2)跟随时间变化的Simulink 仿真波形如图7~图9所示㊂加速度阶段,动子位置和速度经过放大后的波形也分别在图7和图8中给出㊂图7和图8中,X ref (X ref =X 2)和V ref 分别为电机动子位置和速度的参考信号㊂图9中,速度因子随着动子的运动速度呈正比变化,滤波因子呈反比变化㊂调节γ1和γ2可以改变r 和h 的变化速率和轨迹㊂图7㊀位置及加速段放大结果Fig.7㊀Position and acceleration section zoom insimulation图8㊀速度及加速段放大结果Fig.8㊀Speed and acceleration section zoom in simulation在电机动子的初始运动状态下,ANL-TD 首先选择合适的速度因子r 和滤波因子h 初始值,寻找合适的参数γ1和γ2来得到合适的r 和h 的变化规92第10期周世炯等:基于自适应非线性跟踪微分器的直线电机位置和速度检测方法律㊂根据前文的分析,随着电机动子的运动速度增大,测量的位置和速度信号的滞后越来越明显,滤波因子较小可以适当牺牲微分器的降噪性,速度因子快速增大使微分器跟上输入信号,如图7所示,位置信号滞后随着速度升高而增大,但是ANL-TD 的滞后明显小于NL-TD;当被测物运动速度较低时,速度因子较小可以适当牺牲跟踪的快速性,而较大的滤波因子能够滤除一些低速段的测量噪声,如图8所示,虽然初始速度较低时误差较大,但是ANL-TD 的误差明显小于NL-TD㊂所以,由图7~图9可以看出,本文设计的ANL-TD 在速度全程可以获得比NL-TD 质量更好的测量信号㊂图9㊀自适应控制函数仿真结果Fig.9㊀Simulation results of adaptive control functions另外,为了更加直观地验证ANL-TD 的效果,将图7中的ANL-TD 和NL-TD 的位置跟踪信号分别与位置参考信号X ref (X ref =X 2)作比较,得到位置误差信号ΔX 1和ΔX 2;将图8中ANL-TD 和NL-TD 的速度检测信号分别与速度参考信号V ref 比较,得到速度误差信号ΔV 1和ΔV 2,如图10所示㊂图10㊀位置和速度误差仿真结果Fig.10㊀Simulation results of position and speed error由图10可知,NL-TD 存在输出滞后输入信号随着速度增大越来越明显的问题,而ANL-TD 能够明显改善这个问题,它的位置滞后更小,位置跟踪误差在稳速时比NL-TD 减小了0.68m,位置跟踪精度提高了大约70%;速度误差主要集中在低速区域,且相比NL-TD,ANL-TD 在整个运行过程的速度测量误差都较小,它的速度误差比NL-TD 减小了0.2m /s,速度检测精度提高了大约30%㊂进一步证明,相比于传统的NL-TD,ANL-TD 能够在全程获得更加准确的位置信号和速度信号,这也与理论分析的结果一致㊂4㊀实验验证为了进一步验证本文提出ANL-TD 的有效性,采用基于RT-LabOP5607的半实物平台进行验证㊂实验机器主要包含CPU 板卡和Xilinx Virtex7的FP-GA 板卡(如图11所示)㊂在FPGA 板卡中搭建基于激光器阵列的光栅传感器位置和速度检测系统,CPU 控制系统中建立ANL-TD 和NL-TD 算法,跟踪微分器离散化步长为500ns㊂根据表1给出的光栅传感器参数以及图1的系统设计算法,具体流程为:上位机根据速度参考信号03电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第27卷㊀V ref 生成位置参考信号下发给FPGA,FPGA 中的传感器模型产生位置检测信号,以500ns 的周期线性插值后,进入CPU 中的传统NL-TD 和ANL-TD 进行计算得到位置跟踪信号和速度检测信号,最后两者反馈回上位机,分别与速度和位置的参考信号进行比较,跟踪微分器相关的控制参数设计同Simulink 仿真㊂图11㊀基于RT-Lab OP5607的实验平台Fig.11㊀Experiment platform based on the RT-LabOP5607表1㊀光栅传感器参数Table 1㊀Parameters of grating sensor㊀㊀参数数值光栅条长度l /mm 4200栅格宽度D /mm 10激光器间距L /mm1707输出全程的位置和速度波形如图12所示㊂匀速段(高速段)的局部放大图如图13所示㊂低速时位置和速度的波形图如图14所示㊂由图12和图13可知,从3.5~5.5s 处,随着动子运动速度的增大,NL-TD 所测得速度和位置信号滞后越来越明显,最终在最高速处导致速度测量信号误差太大(如5.5~6.5s 处),因而微分放大噪声的作用被进一步放大,最终导致高速下误差也增大㊂然而ANL-TD 全程输出的位置信号和速度信号滞后较小且速度信号更加精确,相较于传统的NL-TD 都有明显的提升,尤其在高速段时与参考信号几乎吻合,这说明ANL-TD 通过参数自适应调整克服了传统跟踪微分器在高速段延迟大的缺点㊂图12㊀位置和速度实验波形Fig.12㊀Position and speed experimentwaveform图13㊀位置和速度高速段放大图Fig.13㊀Enlarged view of position and velocity in thehigh-speed section13第10期周世炯等:基于自适应非线性跟踪微分器的直线电机位置和速度检测方法。
图像中直线的提取方法
图像中直线提取以及方法研究第一节引言在对图像的研究和应用中,人们往往仅对图像中的某些部分感兴趣,这些部分常称为目标或前景(其它部分称为背景),它们一般对应图像中特定的具有独特性质的区域。
为了辨识和分析目标,需要将这些有关区域分离出来,在此基础上才有可能对目标进一步处理,如进行特征提取和测量。
随着数字信号处理技术和计算机技术的发展,机器视觉正得到广泛而深入的研究。
如何正确、快速地识别目标的特征信息,已成为机器视觉领域的研究热点。
直线是图像中物体的基本特征之一,一些人造目标如房屋、道路、桥梁具有明显的直线特征,而一般物体平面图像的轮廓也可以表示为直线及弧线的组合,进而对物体轮廓也可以表示为直线及弧线的组合,进而对物体轮廓的检测可以转化为对这些基本元素的识别和提取。
因此,研究图像中直线的检测算法对图像处理和模式识别具有重要意义。
本文就图像中直线提取方法为核心主要介绍了图像分割技术、边缘检测以及直线提取的几种常用算法。
第二节图像分割技术图像分割(image segmentation)就是按照一定的原则将一幅图像或景物分为若干个特定的、具有独特性质的部分或子集,并提取出感兴趣的目标的技术和过程。
在对各种图像的研究应用中,人们往往仅对图像中的某些部分感兴趣,这些部分常称为目标或前景(其它部分称为背景),它们往往一般对应图像中某些特定的、具有独特性质的区域。
这里的独特性质可以是像素的灰度值、物体的轮廓曲线、颜色、纹理等,也可以是空间频谱或直方图特征等。
在图像中用来表示某一物体的区域,其特征都是相近或相同的,但是不同物体的区域之间,特征就会急剧变化。
目标可以对应单过区域,也可以对应多个区域。
为了辨识和分析目标,需要将它们分离提取出来,在此基础上才有可能进一步进行图像识别与理解。
图像分割的目的是把图像空间分成一些有意义的区域,例如,一幅航空照片,可以分割成工业区、住宅区、湖泊、森林等;可以以逐个像素为基础去研究图像分割,也可以利用在规定领域中的某些图像信息去分割。
halcon提取直线例程
halcon提取直线例程摘要:1.直线提取在Halcon中的重要性2.Halcon中的直线提取例程介绍3.例程的具体实现步骤4.结果展示与分析正文:Halcon是一种常用的机器视觉开发软件,它具有丰富的图像处理和分析功能。
在众多功能中,直线提取是一个重要的应用方向,尤其在工业自动化和机器人领域。
本文将详细介绍Halcon中直线提取的例程。
在Halcon中,直线提取可以通过以下步骤实现:(1) 读取图像并进行预处理,如灰度化、滤波等操作,以便更好地提取直线。
(2) 利用边缘检测或边缘增强算法,如Canny、Sobel等,找到图像中的边缘。
(3) 对边缘进行连接,形成直线候选区域。
(4) 对直线候选区域进行筛选,如根据角度、长度等条件进行筛选,得到最终的直线。
下面我们通过一个具体的例子来详细说明这些步骤。
假设我们使用的是一张灰度图像,首先需要对其进行预处理,以便更好地提取直线。
我们可以使用Halcon中的滤波函数,如中值滤波、高斯滤波等,来降低噪声、消除孤立像素等。
接下来,我们需要利用边缘检测算法找到图像中的边缘。
这里我们选择使用Canny边缘检测算法。
通过计算图像的梯度幅值和方向,我们可以得到图像的边缘强度和位置。
在得到边缘后,我们需要将这些边缘连接起来,形成直线候选区域。
这里我们可以使用Halcon中的查找表(LUT)来实现。
根据边缘的位置和方向,我们可以找到与这些边缘相连的其他边缘,从而形成直线。
最后,我们需要对直线候选区域进行筛选。
根据实际需求,我们可以设置一些筛选条件,如直线的角度范围、长度等。
通过这些条件,我们可以得到最终的直线。
通过以上步骤,我们就可以使用Halcon提取图像中的直线了。
直线提取在机器视觉领域具有广泛的应用,如自动检测、测量、定位等。
一种机载lidar数据电力线快速提取及重构方法
一、概述随着无人机技术的快速发展,机载激光雷达(LiDAR)成为获取地理信息的重要手段之一。
在地理信息领域中,电力线作为城市和农村基础设施的重要组成部分,对其进行快速、准确的提取和重构具有重要应用意义。
二、机载LiDAR数据获取和处理1. 机载LiDAR技术的原理机载LiDAR通过激光器发射激光脉冲,扫描地面并记录激光脉冲的回波信号,从而获取地面点云数据。
2. 机载LiDAR数据处理流程机载LiDAR获取的原始点云数据需要进行过滤、分类、配准等处理,以提高数据质量和准确性。
三、电力线快速提取的相关技术1. 地面点云数据的特征提取利用机载LiDAR获取的地面点云数据,可以通过特征提取算法,获取电力线所具有的特征,如高度、形态、形状等。
2. 电力线检测方法传统的电力线检测方法一般基于形态学、滤波算法等,效果受到地面环境、电力线材质等因素的影响。
近年来,基于深度学习的电力线检测方法逐渐成为研究热点,具有更高的准确性和稳健性。
四、一种机载LiDAR数据电力线快速提取及重构方法1. 基于地面点云的电力线特征提取通过分析地面点云数据的特征,提取电力线的特征点,如交点、拐点等,以便后续的电力线提取与重构。
2. 基于深度学习的电力线检测采用卷积神经网络(CNN)等深度学习算法,对特征点附近的点云数据进行特征提取和检测,实现对电力线的自动识别和提取。
3. 重构电力线通过电力线的特征点和检测结果,对电力线进行三维重构,生成准确的电力线模型。
五、实验与结果分析1. 数据采集采用某型号机载LiDAR设备,在城市和农村地区进行电力线数据采集。
2. 方法验证将提出的电力线快速提取和重构方法应用于实际数据,与传统方法进行对比分析,验证方法的可行性和准确性。
3. 结果分析对实验结果进行深入分析,探讨提出方法的优势和不足之处,为进一步研究和改进提供参考。
六、结论与展望1. 结论总结通过实验验证,提出的机载LiDAR数据电力线快速提取及重构方法具有较高的准确性和效率,适用于不同地区和环境。
双手爪爬杆机器人对杆件的位姿检测与自主抓夹_胡杰
Pole Pose Measurement and Autonomous Grasping with a Biped Climbing Robot
HU Jie1 ,GUAN Yisheng2 ,WU Pinhong1 ,SU Manjia2 ,ZHANG Hong3
(1. School of Mechanical and Automotive Engineering, South China University of Technology, Guangzhou 510641, China; 2. School of Electro-mechanical Engineering, Guangdong University of Technology, Guangzhou 510006, China; 3. Department of Computing Science, University of Alberta, Edmonton T6G2E8, Canada)
第 36 卷第 5 期 2014 年 9 月 DOI:10.13973/ki.robot.2014.0569
机器人
ROBOT
Vol.36, No.5 Sep., 2014
双手爪爬杆机器人对杆件的位姿检测与自主抓夹
胡 杰 1 ,管贻生 2 ,吴品弘 1 ,苏满佳 2 ,张 宏3
510006; (1. 华南理工大学机械与汽车工程学院,广东 广州 510641; 2. 广东工业大学机电工程学院,广东 广州 3. 阿尔伯塔大学计算机科学系,加拿大 埃德蒙顿 T6G2E8)
1
引言(Introduction)
于建筑和化工等高空作业. 双手爪爬杆机器人在攀爬时,需要末端两个夹 持器交替夹紧和松开,即一端夹持器夹紧杆件支撑 整个机器人,另一端夹持器运动到目标杆件,对正 后进行抓夹,再松开之前夹紧的夹持器,寻求下一 个目标抓夹位置,如此反复即实现攀爬运动.为了 保证攀爬过程中抓夹的可靠性和稳定性,除了抓夹 力要足够大之外 [7] ,夹持器必须与待抓杆件对正. 但是,由于机器人制造和控制的误差、本体和夹持
激光中心线提取算法
激光中心线提取算法激光中心线提取算法是一种常用的计算机视觉算法,用于从激光扫描数据中提取出目标物体的中心线信息。
本文将介绍激光中心线提取算法的原理和应用,以及该算法在实际场景中的效果和优化方法。
一、激光中心线提取算法原理激光中心线提取算法是基于激光扫描数据的分析和处理。
激光扫描数据是通过激光传感器获取的目标物体表面的三维坐标点云数据。
而中心线提取算法的目标就是从这些点云数据中提取出目标物体的中心线。
中心线提取算法的原理是基于目标物体的几何特征。
通过对激光扫描数据进行预处理,如去噪、滤波等,可以得到较为干净的点云数据。
然后,通过计算每个点与其邻域点的距离,找出距离最大的点作为中心点。
接下来,根据中心点与其邻域点的距离关系,可以确定中心线的方向。
最后,通过统计中心点的分布情况,可以得到中心线的形状。
激光中心线提取算法在许多领域都有广泛的应用。
其中,最常见的应用就是在机器人导航和自动驾驶系统中。
通过提取道路的中心线,可以帮助机器人或车辆进行路径规划和导航。
此外,激光中心线提取算法还可以应用于工业检测和三维重建等领域。
三、激光中心线提取算法效果及优化方法激光中心线提取算法的效果主要取决于点云数据的质量和算法的参数设置。
如果点云数据存在噪声或缺失,会导致提取的中心线不准确。
因此,在应用激光中心线提取算法之前,需要对点云数据进行预处理,如去噪和补全。
算法的参数设置也会影响提取结果。
例如,中心点的选择和邻域点的距离阈值的设置都会对提取的中心线形状产生影响。
因此,需要根据实际情况进行参数调整和优化,以提高算法的准确性和稳定性。
四、总结激光中心线提取算法是一种常用的计算机视觉算法,通过对激光扫描数据的分析和处理,可以提取出目标物体的中心线信息。
该算法在机器人导航、自动驾驶等领域有广泛的应用。
然而,算法的准确性和稳定性受点云数据质量和参数设置的影响,因此需要进行预处理和优化。
随着计算机视觉技术的不断发展,激光中心线提取算法将在更多领域得到应用,并不断提升其性能和效果。
基于激光雷达的SLAM和融合定位方法综述

基于激光雷达的SLAM和融合定位方法综述代凯12申棋仁12吴官朴12赵阳12马芳武12(1.吉林大学汽车仿真与控制国家重点实验室,长春130022;2.吉林大学汽车工程学院,长春130022)【欢迎引用】代凯,申棋仁,吴官朴,等.基于激光雷达的SLAM和融合定位方法综述[J]•汽车文摘,2021(2):1-8.[Cite this paper]Dai K,Shen Q,Wu G,eL al.A Review of LiDAR Based SLAM and MulLi-Sensor Fusion for Localization[J].AuLomo-Live DigesL(Chinese),2021(2):1-8.【摘要】基于激光雷达的同步定位和建图(SLAM)及融合定位技术是无人驾驶的关键技术。
激光雷达可以从环境中获取精确的距离及强度信息,被广泛应用于高精度地图构建及基于地图的匹配定位,可有效增强基于卫星定位在弱GNSS区域的鲁棒性。
基于当前无人驾驶背景下激光SLAM及融合定位方法的研究现状,对应用于无人驾驶车辆的激光SLAM和融合定位方法的架构原理、标志性成果和研究热点展开综述,并探讨其发展趋势。
主题词:激光雷达无人驾驶同步定位和建图多传感器融合中图分类号:TP391文献标识码:A DOI:10.19822/ki.1671-6329.20200167A Review of LiDAR Based SLAM and Multi-Sensor Fusion forLocalizationDai Kai1,2,Shen Qiren1,2,Wu Guanpu1,2,Zhao Yang1,2,Ma Fangwu1,2(1.State Key Laboratory of Automotive Simulation and Control,Jilin University,Changchun130022;2.College ofAutomotive Engineering,Jilin University,Changchun130022)[Abstract]The LiDAR based Simultaneous Localization And Mapping(SLAM)and multi-sensor fusion localization are the key technologies for autonomous driving.LiDAR can obtain accurate range and intensity information from the environment,and LiDAR is widely used in high-precision map construction and map based matching localization,which can effectively enhance the localization robustness in weak GNSS area.Based on the state-of-art research of LiDAR SLAM and fusion method under the background of autonomous driving,the framework and principle,symbolic achievements and research hotspots of SLAM and fusion methods for autonomous vehicle are summarized,and the development trend is discussed.Key words:LiDAR,Autonomous driving,SLAM,Multi-sensor fusion缩略语NDT Normal Distribution Transform DR Dead ReckoningSLAM Simultaneous Localization And Mapping VINS Visual Inertial SystemLiDAR Light Detection and Ranging MSCKF Multi-State Constraint Kalman Filter GNSS Global Navigation Satellite System1引言IMU Inertial Measurement UnitRTK Real Time Kinematic自动驾驶是当下研究的热点,车辆定位是自动驾ESKF Error State Kalman Filter驶必须解决的关键问题,良好的定位系统不仅能够有LIO LiDAR Inertial Odometry效帮助车辆完成自动驾驶功能,更能够有效提高车辆UWB Ultra Wide Band的安全性。
基于视觉跟踪式自准直仪的十字线提取技术
物镜 焦距 , 采 集 到 的 图像 边 缘 最 清 晰 。 由系统 原 使 理可 知 ,MO C S图像传 感器 应位 于 物镜 焦 平 面上 , 本 系统 中设 计 了一 个 固定 C S摄 像 机 的机 械结 构 , MO
该结 构 可在三 个方 向分 别调整 相机 位置 至物镜 焦 平
十字像采样 , 图像数据采集 到计算机。通过图像 将 滤波 、 特征 识别 、 边缘 提取 和亚 像素 细分 等 图像 处理
方法 实现对 十字线 中心 的精确 提 取 , 而 获 得 反射 从
量、 台面平整度测量 、 精密定位等方面 , 机械制造 、 ; 航空航天、 计量测试 、 科学研究等部 门必备的常规测
e g e e tru i g f to d r d rv t x e tt n i u e o g t t e p e i o i o . ia l , t ih i e f t g d e d t co s r — r e e i aNe e p c ai s s d t e h r cs p st n F n l sr g tl t n n i s o e i y a n i i meh d i p l d a d t e c ne fte co sn ie i b an d T e e p r n e u t h w a h r p s d ag — t o sa pi n h e tro rs i g l so t i e . h x ei e h n me tr s l s o t t e p o o e lo s h t
度分布特点, 出了一种基于视觉跟踪式 自 提 准直仪 的十字线提取算法。对 图像进行预处理后, 进行轮廓提取获得十字线像素级边缘, 采用改进 的一 阶微分期望法精确确定 十字线亚像素边
一种径向基函数插值的ENO格式

2013,49(2)Computer Engineering and Applications 计算机工程与应用1引言直线是机器人SLAM 问题中最常用的特征描述之一,因为选择它作为机器人定位的环境特征拥有许多优点[1],如:直线在室内环境中存在的比较多;从LMS (Laser Measurement Systems )激光雷达检测到的原始点中提取直线较容易,直线特征在地图中存储也容易;在平面坐标系中只用两条不平行直线就可以完成对机器人定位。
文献[2]详细地分析和比较了11种直线段特征提取算法,其中Split-and-Merge 算法是综合性能最好的。
因此它得到了广泛应用,如文献[3-6]。
但是传统的Split-and-Merge 算法存在对直线参数很敏感,效率较低的问题。
因此本文在Split-and-Merge 算法的基础上,通过自适应邻近点簇检测提高算法效率,利用SMF (Split-and-Merge Fuzzy )算法[7]进行线段分割改善算法对参数的敏感程度,最后利用最小二乘拟合出环境中各直线段极坐标系下的参数,同时求出各线段参数的协方差矩阵。
实验结果表明,算法能显著提高线段分割的鲁棒性和线段提取的精度,以及算法的运算效率。
2直线模型在极坐标系中,一条直线可用极点到直线的距离r 和极点到直线的垂线与极轴的夹角α表示。
如图1所示。
一种基于激光传感器的自适应直线提取算法徐君,张国良,王俊龙XU Jun,ZHANG Guoliang,WANG Junlong第二炮兵工程学院301教研室,西安710025Teaching and Research Office 301,The Second Artillery Engineering College,Xi ’an 710025,ChinaXU Jun,ZHANG Guoliang,WANG Junlong.Self-adaption segmentation algorithm for line extraction based on laser puter Engineering and Applications,2013,49(2):43-47.Abstract :Aiming to the problem that the Split-and-Merge segmentation algorithm is very sensitive to changes on some parameters and inefficiency,this paper proposes a self-adaption line extraction algorithm based on it.This algorithm divides the laser sensor data into many near point aggregates by a self-adaption threshold,after that it segments the near point aggregates to many lines with Prototype-based fuzzy clustering algorithm.It estimates lines parameters according to the least square criterion.Experimental results demonstrate that all of robustness to line segmentation,precision to line extraction and efficiency to the algorithm are improved significantly.Key words :line extraction;Split-and-Merge;feature description;laser sensor;least squares method 摘要:针对Split-and-Merge 直线提取算法对参数敏感和运算效率低的问题,提出一种基于该算法的自适应直线提取方法,根据自适应阈值对激光数据进行邻近点簇分割,基于Prototype-based fuzzy clustering 算法对邻近点簇进行线段分割,利用最小二乘拟合直线参数。
halcon提取直线例程
halcon提取直线例程摘要:1.简介2.直线提取在Halcon 中的重要性3.直线提取的基本步骤4.直线提取的实例演示5.总结正文:Halcon 是一种常用的机器视觉开发软件,可以用于图像处理、分析和识别。
在Halcon 中,直线提取是一个重要的功能,可以用于检测和测量图像中的直线。
本篇文章将介绍Halcon 中直线提取的基本步骤和实例演示。
首先,我们需要了解直线提取在Halcon 中的重要性。
在机器视觉应用中,直线通常作为图像中的关键特征,可以用于定位、识别和测量。
因此,提取直线对于图像处理和分析至关重要。
接下来,我们来了解直线提取的基本步骤。
在Halcon 中,直线提取主要分为以下几个步骤:1.读取图像并进行预处理,如灰度化、滤波等,以提高直线提取的准确性。
2.采用边缘检测算法,如Canny、Sobel 等,检测图像中的边缘。
3.对边缘进行连接,形成直线候选区域。
4.对直线候选区域进行筛选,如根据角度、长度等条件进行筛选。
5.对筛选后的直线进行测量,如计算直线的长度、角度等参数。
了解基本步骤后,我们通过一个实例来演示直线提取的过程。
假设我们有一个如下所示的图像:```image := ReadImage("example.bmp")```首先,我们对图像进行预处理,以消除噪声和提高直线提取的准确性:```image := PreprocessImage(image, gray)```接下来,我们采用Canny 边缘检测算法检测图像中的边缘:```edges := CannyEdgeDetection(image, 50, 150)```然后,我们将边缘连接成直线候选区域:```lines := ConnectEdges(edges)```现在,我们需要筛选出符合条件的直线。
假设我们只保留长度在10 到50 像素之间的直线:```selected_lines := SelectByLength(lines, 10, 50)```最后,我们可以对筛选后的直线进行测量,例如计算直线的长度和角度:```measurements := MeasureLines(selected_lines)```以上就是使用Halcon 进行直线提取的基本步骤和实例演示。
3D相机FPGA中心线提取的验证
• 77•3D相机是一种微小型机器视觉系统,可以满足多种机器视觉解决方案。
由于FPGA硬件实现的线激光中心线提取无法知道其提取的正确性,需要在PC客户端验证其正确性。
对CMOS传感器采集的激光条纹进行具体分析,对激光条纹进行预处理,通过PC客户端利用大津法求出阈值配置给FPGA部分,以及在3D相机后台也设计与实现了线激光中心线提取。
在PC客户端将FPGA部分提取的坐标绘制到原始图像进行简单验证,对比软件中心线提取,分析两者的差别。
随着计算机技术的发展和工业自动化水平的提高,自动检测技术得到越来越广泛的重视和应用,3D相机的应用也越来越广泛。
作为自动化装备的“眼睛”,3D相机应用是通过在不同的应用场景下来使用不同的图像处理方式,以满足不同的需求。
线结构光扫描技术是一种基于激光三角法的非接触式测量技术,被广泛用于三维测量、质量检测、三维图像重构、焊缝跟踪等领域。
传统的线结构光中心线提取技术主要有几何法、Steger法、骨架细化法、灰度重心法、极值法等。
针对当前的现状和市场需求,3D相机FPGA部分对激光条纹采用灰度重心法每列选取32点的方式来求取其质心坐标,由于我1 系统的基本框架组成3D相机一般要求具备图像采集,图像传输和图像处理等功能。
3D相机后台管理软件获取前台数据为多线程程序。
其中包含多个线程:(1)一个关于获取激光条纹原始图像10位raw格式数据的线程。
(2)一个关于获取FPGA部分线激光中心线提取坐标16位二进制raw格式数据的线程。
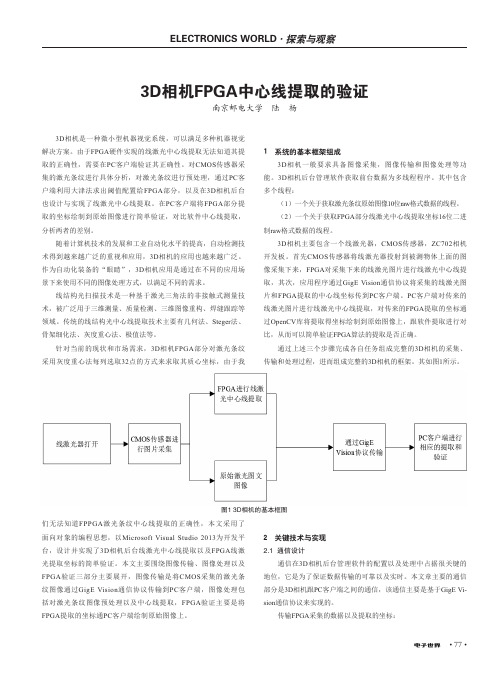
3D相机主要包含一个线激光器,CMOS传感器,ZC702相机开发板。
首先CMOS传感器将线激光器投射到被测物体上面的图像采集下来,FPGA对采集下来的线激光图片进行线激光中心线提取,其次,应用程序通过GigE Vision通信协议将采集的线激光图片和FPGA提取的中心线坐标传到PC客户端。
PC客户端对传来的线激光图片进行线激光中心线提取,对传来的FPGA提取的坐标通过OpenCV库将提取得坐标绘制到原始图像上,跟软件提取进行对比,从而可以简单验证FPGA算法的提取是否正确。
基于车载激光雷达的车道线识别算法及实现

基于车载激光雷达的车道线识别算法及实现车载激光雷达在自动驾驶和驾驶员辅助系统中扮演重要的角色,其中车道线识别是其中一个关键任务。
本文将介绍基于车载激光雷达的车道线识别算法及其实现。
车道线识别是自动驾驶和驾驶员辅助系统中的一个基础任务,它能够识别道路上的车道线并进行相关的处理与分析。
车道线识别算法可以帮助车辆保持在正确的行驶轨道上,并且为其他功能如自动跟车、变道等提供基础支持。
基于车载激光雷达的车道线识别算法通常包括以下几个步骤:1.数据采集:车载激光雷达通过发射激光束并测量其返回时间来获取道路上的点云数据。
这些点云数据包含了环境中的物体信息,其中包括车道线。
2.数据预处理:对于采集到的点云数据,首先需要进行数据预处理和滤波以去除无用的数据点,并提取出主要的车道线信息。
常用的预处理方法包括滤波、去噪、降采样等。
3.特征提取:在预处理过程中,我们可以根据车道线的特点和形状提取相应的特征。
常见的特征包括曲线形状、线条粗细、颜色等。
这些特征可以帮助我们进一步区分车道线。
4.分割与检测:在特征提取的基础上,可以使用各种图像处理和机器学习算法对车道线进行分割和检测。
常见的方法包括边缘检测、直线检测、曲线拟合等。
5.跟踪与更新:随着车辆的行驶,车道线的位置和形状会发生变化。
因此,车道线识别算法需要具备跟踪和更新的能力,以便在动态环境中准确地识别车道线。
6.标定和验证:为了确保算法的准确性和稳定性,需要对车载激光雷达进行标定和验证。
标定可以校准激光雷达与车辆坐标系之间的转换关系,验证可以通过与其他传感器(如摄像头)进行比对来验证识别结果的准确性。
基于上述步骤,车辆的激光雷达可以实现对车道线的识别和跟踪。
通过车道线识别算法,车辆可以根据道路的信息做出相应的驾驶操作,如自动驾驶转向、自动跟车等。
然而,基于车载激光雷达的车道线识别算法也存在一些挑战。
首先,由于激光雷达只能提供点云数据,无法获得颜色等细节信息,因此在低光照或者恶劣天气条件下识别效果可能受到限制。
线激光提取算法

线激光提取算法1. 简介线激光提取算法是一种用于从图像或点云数据中提取线激光的方法。
线激光是指由激光器发射的一条细长的光束,通常用于测量和建模三维环境。
线激光提取算法的目标是从复杂的背景中准确地分离出线激光,并提取出其相关属性,如位置、方向和强度等。
线激光提取算法在许多领域都有广泛应用,包括机器人导航、三维建模、自动驾驶等。
通过提取线激光信息,可以实现环境感知、障碍物检测和路径规划等功能。
2. 常见的线激光提取算法2.1 阈值分割算法阈值分割算法是最简单且常用的线激光提取方法之一。
该算法基于图像或点云数据中线激光与背景之间的明显对比,通过设定一个合适的阈值来将线激光与背景分离。
具体步骤如下:1.将图像或点云数据转换为灰度图像或灰度值;2.设定一个合适的阈值,将灰度值高于阈值的像素点标记为线激光;3.根据需要,可以进行后处理操作,如噪声去除、线段连接等。
阈值分割算法简单快速,适用于背景与线激光对比明显的情况。
然而,在复杂背景或光照变化等情况下,该算法可能无法准确提取线激光。
2.2 基于几何特征的算法基于几何特征的线激光提取算法利用线激光在图像或点云中的几何特征进行分割。
这些几何特征可以是直线性质、形状约束或拓扑结构等。
常见的基于几何特征的算法包括:•Hough 变换:通过将图像或点云中的点映射到参数空间,并检测参数空间中的峰值来提取直线;•RANSAC(随机抽样一致性):通过随机选择一组数据点,并根据模型与数据之间的一致性进行迭代优化来提取直线;•拓扑约束:利用线激光的拓扑结构,如端点、交叉点等进行线激光提取。
基于几何特征的算法可以提取出更精确的线激光,但其计算复杂度较高,对噪声和异常点敏感。
2.3 基于机器学习的算法近年来,基于机器学习的线激光提取算法逐渐得到广泛应用。
这些算法利用已标注的线激光数据进行训练,并通过学习线激光与背景之间的关系来提取线激光。
常见的基于机器学习的算法包括:•支持向量机(SVM):通过将线激光和背景分别表示为特征向量,并在特征空间中找到一个超平面来分类;•卷积神经网络(CNN):通过堆叠多个卷积层、池化层和全连接层来实现端到端的线激光提取。