nelder-mead-simplex[1]
第五章 单纯形优化设计法1
E
0 0 0 0 0 0.775 0.129 0.129 0.129 0.129 0.129
F
0 0 0 0 0 0 0.764 0.109 0.109 0.109 0.109
G
H
I
J
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0.756 0 0 0 0.094 0.750 0 0 0.094 0.083 0.745 0 0.094 0.083 0.075 0.742
23
上述方法是根据初始点和步长来计算初始单纯形的各 个顶点,各因素的步长是相同的,称作固定步长法或正 规单纯形法。 如二因素实验举例: 因素1:pH,因素2:温度。 初始值x0=(7.0,40);步长a1=0.5, a2=5。 这是几维单纯形?有几个顶点? 第一个顶点x1=(x11,x12)=(x01+p1,x02+q2)
10
什么是单纯形? 单纯形(Simplex)是数学里最优化方法中的一个名 词。它是指多维空间的凸多面体,其顶点数比空间维 数多1。
例如:一维空间的单纯形是一条直线,二维空间中是
三角形,三维空间中是四面体。
11
什么是单纯形优化法?
单纯形优化法是一种多维搜索寻优方法。 它是利用单纯形的顶点计算目标函数值,按一定的规则 进行探索性搜索,判断目标函数的变化趋势,确定有利的 搜索方向和步长。 经过不断的迭代,最终使结果收敛
f ( x) W1 f1 ( x) W2 f 2 ( x) ... Wq f q ( x)
6
优化设计的数学模型是对优化设计问题的数学抽象。
优化设计的数学表达(数学模型式):
遗传算法理论及其应用发展
遗传算法理论及其应用发展摘要:首先介绍了遗传算法的基本工作原理和主要特点; 然后讨论了近年来从遗传算子、控制参数等方面对遗传算法的发展,并对遗传算法在国内外的研究进展和新的应用领域进行了讨论; 最后评述了遗传算法未来的研究方向和主要研究内容。
关键词:遗传算法; 遗传算子; 控制参数; 组合优化遗传算法[1] (Genetic Algorithms,简称GA )是由美国Michigan 大学的Holland教授于1975年首先提出的。
它源于达尔文的进化论、孟德尔的群体遗传学说和魏茨曼的物种选择学说; 其基本思想是模拟自然界遗传机制和生物进化论而形成的一种过程搜索最优解的算法。
从公开发表的论文看, 我国首先开始研究应用遗传算法的有赵改善和华中理工大学的师汉民等人。
遗传算法最早应用于一维地震波形反演中, 其特点是处理的对象是参数的编码集而不是问题参数本身, 搜索过程既不受优化函数联系性的约束, 也不要求优化函数可导, 具有较好的全局搜索能力; 算法的基本思想简单, 运行方式和实现步骤规范, 具有全局并行搜索、简单通用、鲁棒性强等优点, 但其局部搜索能力差, 容易出现早熟现象。
自1985年起, 国际遗传算法会议每两年召开一次, 在欧洲, 从1990年开始每隔一年也举办一次类似的会议。
1993年, 国际上第一本以遗传算法和进化计算为核心内容的学术期刊5 Evolutionary Com putation6 (进化计算) 在MIT 创刊; 1994年, 在美国奥兰多召开的IEEE World Congress on Computation Intelligence ( IEEE全球计算智能大会)上, 进化计算与模糊逻辑、神经网络一起统称为计算智能; 1997年, 5 IEEE Transaction son Evolutionary Computation6创刊。
这些刊物及时全面地报道了近年来遗传算法的最新研究成果。
Nelder—Mead单纯形算法改进及在气象上的应用

讲
2 1 00 0 01 9收 到 ,2 1 52 0 l0 —0收 到再 改稿 。
* E— alz z a g c ms c . o . n m i:q h n @ a . ma g v c
合 的凸包 。例 如 ,一 纯形 就 是 点 ,一 0单 1单纯 形 就 是线
a 。这种 算法 有 很 多 , 黄 金 分 割搜 寻法 、 波 那 契 如 斐 搜 寻法 等 , 因此 , 进后 的 NMS算 法仍 然 为一 种 无 改
微 分算 法 。
这 种 引 用 适应 参 数 计 算下 一 个 迭 代点 的方 法 , 与 P wel 法 中 的相 同 , o l算 但搜 索极 值 点 的方 向不 相 同 。本 改 进 算 法 的 搜 索 方 向 是 准 梯 度 方 向 , 而 P wel 法 的搜 索 方 向是 先 依 次沿 着 已知 的 N 个 o l算 共 轭方 向搜 索 , 得一 个最 佳点 , 然后 沿 着本 轮迭 代 的 初 始点 与该 最佳 点 连 线 方 向进 行 搜 索 , 得 这 一 阶 求 段 的最佳 点 。再 用 最 后 的搜 索 方 向取 代 前 N 个 方
55 8
间可 以构 成 N+1 点 的多 面体 。亦 即对 于 拥有 N 顶
对 于一个 拥有 N 个 变量 的 函数 , 以构成 一 个 可
个 变 量 的 函数 , 以构 成N+1 点 。 可 个 在计 算 开始 时 , 计算 出 每个点 的函数值 , 找 先 查 出最 大值 的点 ( 和最 小值 的点 ( ) 再计 算 除 G点 G) S,
是 计算 精度 。如 果 这 两 个 方 面都 达 到最 优 , 计 算 则 方 案 最佳 。但 很 多 无 微 分 算 法 都 存 在 某 方 面 的 缺 陷 , 然需 要做 进一 步改 进 。 仍
python scipy minimize method参数选择

python scipy minimize method参数选择Python中的SciPy库是一个强大的科学计算库,它提供了许多高效的数值算法和统计方法。
其中的minimize方法是一个用于寻找函数极小值的优化算法。
本文将重点讨论如何选择minimize方法的参数,以实现对求解问题的最优化。
一、理解minimize方法及其参数minimize方法是SciPy库中的一个重要函数,用于对一个或多个变量的函数进行最小化。
其基本语法如下:pythonscipy.optimize.minimize(fun, x0, method=None, jac=None,hessp=None, hess=None, constraints=(), tol=None, bounds=None, callback=None, options=None)下面对其中的一些重要参数进行解释:1. fun:待最小化的目标函数;2. x0:包含优化问题的初始猜测值的一维数组;3. method:指定要使用的优化算法;4. jac:目标函数的梯度函数。
如果不提供,则将使用数字估算;5. hessp:目标函数的Hessian矩阵向量积函数。
如果不提供,则将使用数字估算;6. hess:目标函数的Hessian矩阵。
如果不提供,则将使用数字估算;7. constraints:一个序列,包含字典或OptimizeResult对象,用于定义约束条件;8. tol:算法的终止条件;9. bounds:一个序列,定义变量的边界条件;10. callback:在算法迭代过程中调用的可调用对象;11. options:一个字典,包含可选的额外参数。
二、选择适当的优化方法minimize方法中的method参数是一个选择优化算法的关键。
SciPy库提供了许多不同的方法,每种方法适用于特定类型的问题和函数。
下面是一些常用的方法及其适用情况:1. Nelder-Mead:适用于小规模问题,不需要任何梯度信息;2. Powell:适用于目标函数不平滑的问题;3. CG:适用于目标函数是二次型的问题;4. BFGS:适用于目标函数不需要二阶导数的问题;5. Newton-CG:适用于目标函数是二次型且Hessian矩阵不可逆的问题;6. L-BFGS-B:适用于目标函数不需要二阶导数且变量在边界内的问题;7. TNC:适用于目标函数不需要二阶导数且变量有边界的问题。
TracePro2D及3D优化功能
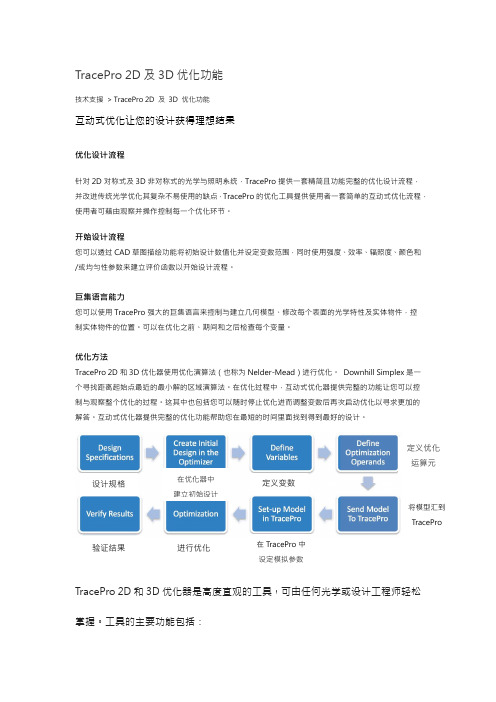
TracePro 2D 及3D 优化功能技术支援 > TracePro 2D 及 3D 优化功能 互动式优化让您的设计获得理想结果优化设计流程针对2D 对称式及3D 非对称式的光学与照明系统,TracePro 提供一套精简且功能完整的优化设计流程,并改进传统光学优化其复杂不易使用的缺点,TracePro 的优化工具提供使用者一套简单的互动式优化流程,使用者可藉由观察并操作控制每一个优化环节。
开始设计流程您可以透过CAD 草图描绘功能将初始设计数值化并设定变数范围,同时使用强度、效率、辐照度、颜色和/或均匀性参数来建立评价函数以开始设计流程。
巨集语言能力您可以使用TracePro 强大的巨集语言来控制与建立几何模型、修改每个表面的光学特性及实体物件,控制实体物件的位置。
可以在优化之前、期间和之后检查每个变量。
优化方法TracePro 2D 和3D 优化器使用优化演算法(也称为Nelder-Mead )进行优化。
Downhill Simplex 是一个寻找距离起始点最近的最小解的区域演算法。
在优化过程中,互动式优化器提供完整的功能让您可以控制与观察整个优化的过程。
这其中也包括您可以随时停止优化进而调整变数后再次启动优化以寻求更加的解答。
互动式优化器提供完整的优化功能帮助您在最短的时间里面找到得到最好的设计。
TracePro 2D 和3D 优化器是高度直观的工具,可由任何光学或设计工程师轻松掌握。
工具的主要功能包括:在优化器中建立初始设计设计规格 定义优化运算元定义变数将模型汇到TracePro 在TracePro 中设定模拟参数 进行优化 验证结果∙Surface Lists 面列表包含所有可用面类型,例如Planar,BSpline(自由、X、Y、XY),参数化(双锥曲面),2D剖面(非对称、对称、椭圆),和使用者自订路径(2D、3D)。
∙Property Editor 特性编辑器根据选择的不同而改变显示内容,一般来说包括原点、倾斜中心和角度(X、Y、Z),是否先倾斜然后偏移、厚度、材料类型、表面特性、延伸角度和折射率。
长江大学城市建筑学院

[学者简介]曾磊一、基本情况曾磊:男,1979年9月出生,讲师,工学博士。
2001年7月毕业于四川大学建筑工程专业,2003年9月至2008年6月在西安建筑科技大学学习,获防灾减灾及其防护工程专业硕士学位和结构工程专业博士学位。
2008年7月至今任教于长江大学城市建设学院土木工程系。
二、主要讲授课程(1)混凝土结构设计,本科生专业课程(2)工程项目管理,本科生专业课程(3)防灾工程学,研究生专业课程(4)高等混凝土结构理论,研究生专业课程(5)土木工程专业本科毕业设计三、目前承担科研课题(1)国家自然科学基金项目,异形截面钢管混凝土柱—钢梁节点力学性能与设计方法研究,参与(2)湖北省教育厅优秀中青年人才项目,型钢高强高性能混凝土框架节点地震破坏准则研究,主持(3)湖北省建设科技研究项目,基于粘结性能的再生骨料混凝土高性能化应用研究,主持(4)长江大学科技发展基金项目,型钢高强高性能混凝土框架节点地震损伤演化及失效机理,主持四、主要获奖情况(1)陕西省高等教育科技进步二等奖,2009(2)中国土木工程学会优秀论文奖,2008(3)西安建筑科技大学优秀毕业生,2008五、专利申请一种用于型钢混凝土组合结构的混凝土,国家发明专利,专利号:ZL200610041959.5六、论文发表目前以第一作者发表论文13篇,EI收录2篇,ISTP收录4篇,中文核心4篇。
以第二、第三作者发表论文十余篇,其中,其中EI收录4篇, ISTP收录5篇。
(一)教材《组合结构设计原理》,武汉大学出版社,2009,本人参编约6万字。
(二)主要论文[1] 曾磊,许成祥,郑山锁,吕营.型钢高强高性能混凝土框架节点恢复力模型,土木建筑与环境工程,2009,31(s)(中文核心)[2] 郑山锁,曾磊,孙庆刚,吕营,王沛钦.型钢高强高性能混凝土框架节点抗震性能试验研究.建筑结构学报,2008,29(3)(EI收录)[3] Shan-Suo Zheng, Lei Zeng et al. Multi-objective optimization on mix proportions of HSHPC applied to SRC composite structures. International Journal for Simulation and Multidisciplinary Design Optimization, 2008, 2(3) (an international journal)[4] 曾磊,许成祥,郑山锁.考虑高强度混凝土脆性影响的型钢混凝土框架节点受剪承载力计算公式,建筑结构,2010,40(4) (中文核心)[5] 曾磊,许成祥,郑山锁.型钢高强高性能混凝土框架节点非线性有限元分析,工程抗震与加固改造,2010,32(2) (中文核心)[6] 曾磊,许成祥,郑山锁,查春光.型钢高强高性能混凝土节点承载能力试验研究,武汉理工大学学报(自然科学版),2010,32(10) (中文核心)[7] 曾磊,查春光,郑山锁.基于混合惩罚函数法的型钢混凝土框架柱优化设计,四川建筑科学研究,2010,36(2) (中文核心)[8] 曾磊,郑山锁,查春光. 型钢混凝土矩形截面梁优化设计. 哈尔滨工业大学学报, 2007, 39(s)(EI收录)[9] 曾磊,郑山锁,吴敏哲,车顺利,张亮,邓国专.适用于型钢混凝土结构的高强高性能混凝土试验研究及其力学性能分析.建筑结构学报,2006, 27(s)(EI 收录)[10] Lei Zeng, Shan-suo Zheng, Shunli Che, Optimum design of SRC frame beams based on bond-slip theory. The 10th International Symposium on Structural Engineering for Young Experts, Changsha, China,2008(ISTP 收录)[11] Lei Zeng, Shansuo Zheng, Peiqin WANG. Crack pattern of steel reinforced high strength and high performance frame joints. 9th International Conference on Steel, Space & Composite Structures, 14-15 Oct, Beijing, China(ISTP收录)[12] S.S. Zheng, L. Zeng, L. Li, S.L. Che, L. Zhang. Seismic damage model for steel reinforced high strength and high performance concrete frame joints. Key Engineering Materials,2007,Vols.(EI收录)[13] 曾磊. 土木工程实验教学体系改革探索. 高等建筑教育, 2009, 4[14] 曾磊. 基于问题的学习方法在土木工程教学中的应用. 高等建筑教育, 2009, 6电子邮件:zenglei28#[学者简介]陈娟姓名:陈娟性别:女出生年月:1980年9月职称职务:讲师最后学位:博士学习和工作简历:1998.9~2002.7湖北农学院城镇建设系土木工程专业,获工学学士学位;2002.9~2005.7武汉大学水利水电学院材料学专业,获工学硕士学位;2005.9~2008.6武汉大学土木建筑工程学院结构工程专业,获工学博士学位;社会兼职:无研究方向:研究方向为水泥混凝土材料、钢管混凝土结构;主讲本科生课程,《钢结构基本原理》、《钢结构设计》科学研究及学术成果:公开发表论文11篇,其中ISTP、EI收录2篇。
Optimization Toolbox MATLAB优化工具箱
Optimization Toolbox--求解常规和大型优化问题Optimization Toolbox 提供了应用广泛的算法集合,用于求解常规和大型的优化问题。
这些算法解决带约束、无约束的、连续的和离散的优化问题。
这些算法可以求解带约束的、无约束的以及离散的优化问题。
工具箱中包含的函数可以用于线性规划、二次规划、二进制整数规划、非线性优化、非线性最小二乘、非线性方程、以及多目标优化等。
用户能够使用这些算法寻找最优解,进行权衡分析,在多个设计方案之间平衡,以及将优化算法集成到算法和模型之中。
主要特点•交互式工具用于定义、求解优化问题,并能监控求解过程•求解非线性优化和多目标优化问题•求解非线性最小二乘,数据拟合和非线性方程•提供了解决二次方程和线性规划问题的方法•提供了解决二进制整数规划问题的方法•某些带约束条件的非线性求解器支持并行运算使用Optimization Toolbox 中的基于梯度的求解器寻找峰值函数(peaks function)的局部最小解。
运用优化工具箱提供的大型线性最小二乘法修复一张模糊的照片。
定义,求解以及评定优化问题优化工具箱提供了解决极小极大值问题的最常用方法。
工具箱包含了常规和大型优化问题的算法,使用户可以利用问题的稀疏结构来求解问题。
用户可以通过命令行或图形用户界面Optimization Tool调用工具箱函数和求解器选项。
通过命令行运行的优化程序(左,调用了定义指标函数(右上)和限定条件方程(右下)的MATLAB文件。
Optimization Tool 是一个将一般优化工作简单化的图形用户界面。
通过该图形用户界面,用户能够完成以下操作:•定义自己的优化问题并选择求解器•配置,检验优化选项和所选求解器的默认设置•运行优化问题,显示中间以及最终结果•在可选择的快速帮助窗口中查看特定求解器的文档•在MATLAB 的工作空间和优化工具之间导入和导出用户问题的定义,算法配置和结果•保存用户工作和使工作自动化,自动生成M 语言代码•调用Global Optimization Toolbox中的求解器使用Optimization Tool 设置并求解的一个优化程序(左)。
Matlab习题答案

参考答案: (1) >> (3-5*i)*(4+2*i) ans =
22.0000 -14.0000i
(2) >> sin(2-8*i) ans =
1.3553e+003 +6.2026e+002i
5.判断下面语句的运算结果。 (1) 4 < 20 (2) 4 <= 20 (3) 4 == 20 (4) 4 ~= 20 (5) 'b'<'B' 参考答案: (1) >> 4<20 ans =
y_nearest(i)=interp1(x,y,scalar_x(i),'nearest'); y_linear(i) =interp1(x,y,scalar_x(i),'linear'); y_spline(i) =interp1(x,y,scalar_x(i),'spline'); y_cubic(i) =interp1(x,y,scalar_x(i),'cubic'); end subplot(2,2,1),plot(x,y,'*'),hold on,plot(scalar_x,y_nearest),title('method=nearest'); subplot(2,2,2),plot(x,y,'*'),hold on,plot(scalar_x,y_linear),title('method=linear'); subplot(2,2,3),plot(x,y,'*'),hold on,plot(scalar_x,y_spline),title('method=spline'); subplot(2,2,4),plot(x,y,'*'),hold on,plot(scalar_x,y_cubic),title('method=cubic'); 得到结果为:
低维Nelder-Mead单纯形法的收敛性

摘要:内尔德米德单纯形算法,在1965年首次出版,是一个非常普遍的多维无约束极小化的直接搜索方法。
尽管它被广泛使用,基本上没有理论的结果已经明确证明内尔德米德算法。
本文提出内尔德米德算法的收敛性应用于严格的一维和二维和严格凸函数。
我们证明了对于一维可以收敛到极小,对于二维有多个收敛极限。
麦金农的反例给出了一组严格的二维的凸函数和一组初始化条件用内尔德算法收敛不到极小。
还不知道是否能证明内尔德米德方法对于很特殊的一类二维凸函数可以收敛到极小。
1、简介:自1965年出版以来,内尔德米德单纯形算法已成为非线性无约束优化使用最广泛的方法之一。
内尔德米德算法不应该与更著名的用于线性规划的丹茨格单纯形算法混淆;两种算法都采用了单纯的一个序列,但是它们完全不同的,而且是无关的,内尔德米德方法适用于无约束优化。
内尔德米德算法尤其在化学,化工,医药领域应用广泛。
最近的一本书,其中包含了成千上万的引用书目,是完全致力于(用来介绍)内尔德米德方法和变化。
内尔德米德方法随处可见的两个方法出现在最畅销的书册(Numerical Recipes )中,在它被叫做“阿米巴算法”在Matlab 也是。
内尔德米德方法试着最小化一个n 个实变量的标量非线性函数,只用函数本身的值,不用任何衍生信息(显式或隐式)。
因此内尔德米德方法属于一般类的直接搜索方法。
对这些方法的讨论,看【13,18】中的例子。
直接搜索方法的一个大的子类,包括内尔德米德方法,在每一步中保持一个非简并单纯的几何图形,这个图形处在n 维非零量中,这些非零量是突出部分的n+1个顶点。
一个基于单纯形法的直接搜索法中的每一次迭代都是从一个单纯形开始的,通过制定它的n+1顶点和与之相关的函数值。
伴随着函数值,计算它的一个或多个测试点,直到边界迭代终止。
第4节在一维中分析内尔德米德,第5节中介绍了二维中内尔德米德算法的极限收敛结果。
最后,第6节讨论了开放问题。
2、内尔德米德算法内尔德米德算法提出了一个最小化实值函数f (x )( n x R ∈)的方法。
SmartProcess燃烧优化系统及其应用
SmartProcess燃烧优化系统及其应用摘要:提高燃烧效率,降低煤耗是当前发电企业重点考虑的问题之一。
文章介绍了艾默生公司SmartProcess燃烧优化系统的基本原理:采用线性模型、神经网络模型和多种优化算法实现燃烧控制系统设定值和偏差的优化,从而实现燃烧过程优化。
并介绍了该优化系统的硬件结构、具体优化实施步骤、应用案例和投资回报情况。
关键词:燃烧优化;OPC;集散控制系统 0 引言2000年以来,我国的火电装机容量持续攀升。
据中国电力企业联合会不完全统计,2003年新增装机容量3484万kW,2004年新增装机容量5055万kW[1],预计到2007年,电力市场将呈现供需总体平衡,略有剩余的状态,未来会凸现发电市场竞争的局面。
加之煤价成本飞升和《京都议定书》等各种环保规范的约束,在未来一段时间内,如何提高燃烧效率,减少污染物排放,降低发电成本将成为发电企业重点考虑的问题之一。
因此,多家过程控制厂商推出了各具特色的优化控制产品和解决方案。
本文重点介绍艾默生过程控制有限公司的燃烧优化解决方案——SmartProcess燃烧优化系统,包括其基本原理、硬件、软件架构及应用案例。
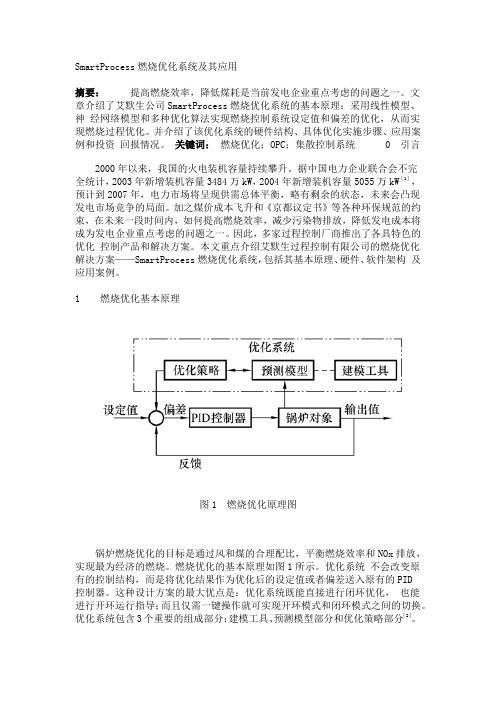
1 燃烧优化基本原理图1 燃烧优化原理图锅炉燃烧优化的目标是通过风和煤的合理配比,平衡燃烧效率和NOx排放,实现最为经济的燃烧。
燃烧优化的基本原理如图1所示。
优化系统不会改变原有的控制结构,而是将优化结果作为优化后的设定值或者偏差送入原有的PID控制器。
这种设计方案的最大优点是:优化系统既能直接进行闭环优化,也能进行开环运行指导;而且仅需一键操作就可实现开环模式和闭环模式之间的切换。
优化系统包含3个重要的组成部分:建模工具、预测模型部分和优化策略部分[2]。
建模工具提供各种数据分析、稳态模型和动态模型工具,能够利用锅炉运行数据和一系列燃烧试验数据建立和测试针对特定机组的数学模型。
通过仿真测试的模型将作为预测模型投入实际运行。
蓄电池SOH估算方法研究综述

蓄电池SOH估算方法研究综述耿星;王友仁【摘要】蓄电池运行状态是否正常,直接影响着应用领域中各种设备的正常、可靠和安全运行.在无人值守现场、电子商务中心、银行等关键公共场合,蓄电池就显得更为重要.电池健康状态用于定量描述电池当前偏离额定指标的程度,是蓄电池状态监测的重要指标.由于蓄电池结构的复杂性,电池健康状态无法直接测量读数,只能通过外特性估算.重点阐述了近年来蓄电池健康状态的估算方法.【期刊名称】《机械制造与自动化》【年(卷),期】2019(000)001【总页数】3页(P204-206)【关键词】蓄电池;健康状态;估算方法;综述【作者】耿星;王友仁【作者单位】南京航空航天大学自动化学院,江苏南京211106;南京航空航天大学自动化学院,江苏南京211106【正文语种】中文【中图分类】TM9120 引言随着国家经济不断发展,能源、电力、交通、通信、环保等领域现代化水平逐步提高。
作为后备能源的蓄电池系统正在被大量使用。
对所有不允许断电的供电电源系统来说,蓄电池组都是一个不可缺少的后备电源系统。
蓄电池运行状态是否正常,直接影响着应用领域中各种设备的正常可靠和安全运行。
在无人值守现场、电子商务中心、银行等关键公共场合,蓄电池就显得更为重要[1]。
因此,对蓄电池运行状态进行监测和故障诊断具有十分重要的意义。
将蓄电池大规模、高可靠地工程化,其中的关键环节是电池管理系统(battery management system,BMS)技术,但目前仍不够完善。
随着先进电池在电动汽车中应用的推广及其技术的发展,对电池管理系统的要求也不断提高。
制约BMS 大规模、全领域应用的一个关键因素是电池的健康状态(state of health, SOH)很难准确估计,直接影响电池容量的有效发挥,降低了电池使用的安全性和可靠性,使得电池充放电控制缺乏足够参考依据,最终影响电池性能和使用寿命[2]。
健康状态是指蓄电池当前的主要性能偏离了额定的设计性能及指标,如单体电池在充满电的状态下的容量大小、内阻大小、大电流放电下的端电压及充电时电池的接受能力、不同的温度特性等[3]。
Nelder-Mead单纯形算法改进及在气象上的应用
Nelder-Mead单纯形算法改进及在气象上的应用张正秋【摘要】Owing to computers providing great advantage in iterative calculation, the non-derivative algorithms have great potential applications to scientific research. Nelder-Mead Simplex (NMS) algorithm is a technique for minimizing an objective function in a multiple-dimensional space without differentiation, proposed by Nelder and Mead (1965). As a simple non-derivative technique, NMS algorithm is widely introduced in many computational books and used in numerical computations, and Matlab implements this algorithm for instance. Unfortunately, the method has some disadvantages such as slow converging and low precision, which need to be improved.Meteorological problems, usually nonlinear, are very complicated to solve, which require nonlinear fittings, solving the relationships between different meteorological variables, determining parameters in empirical formulas, solving the system of nonlinear equations and so forth. Conventionally, nonlinear problems are usually transformed into linear ones to solve, but this is not always practical. Fortunately the non-derivative algorithm could do this work, and an introduction to the application of the NMS algorithm to meteorological computations could be beneficial for meteorological community.An improvement on the NMS algorithm is proposed. To avoid the problems existing in the original NM simplex algorithm, a constraint is introduced to obtain next iterative point rather than finding the points of reflection,expansion, contraction and shrink, similar to that in the Powell's Method or in the Steepest Gradient algorithm. However, the searching direction is still along the downhill direction, I. E. , the direction along the segment line between the vertex with the greatest functional value and the gravity center point. By introduction of the constraint, the multi-variable function will be transformed into a function with one variable, I. E. , the constraint, which can be solved by the algorithms to calculate the minimum of a function with one variable, such as the Golden Section Search, Fibonacci Search and so forth. This approach will still keep the calculation without differentiation. After the improvement, the computation is greatly simplified, and its convergence will be accelerated.Some possible applications of the NMS algorithm to meteorology are also introduced, and it's also described how to implement the algorithm in fitting parameters in empirical formulas and solving the system of nonlinear equations.To testify this improvement, fitting experiments to some parameters in land surface process are made using the modified algorithm. Relationships between zero plane displacement and leaf area index (/la) and between aerodynamic resistance and 7LA at ground surface are calculated using the Least Square Method and the NMS algorithm to determine parameters. Experimental results show that the proposed algorithm have very high precision when fitting nonlinear formulas, therefore it can be used in computations for solving nonlinear issues or the system of nonlinear equations.%Nelder-Mead Simplex (NMS)算法是一种查找多元函数局地最小值的无微分算法,在现代科学计算中得到广泛应用,该文提出了一种对NMS算法的改进方法.改进后,大大简化了其计算过程,提高了该算法的收敛速度.利用改进后的算法对陆面过程参数进行了拟合计算,结果表明:改进的NMS算法对非线性公式具有非常高的拟合精度,可将其应用于气象学上非线性问题计算或非线性方程组求解.【期刊名称】《应用气象学报》【年(卷),期】2011(022)005【总页数】6页(P584-589)【关键词】NMS算法;改进;无微分;气象学;非线性应用【作者】张正秋【作者单位】中国气象科学研究院,北京100081【正文语种】中文Nelder-Mead Simplex(NMS)算法是一种查找多元函数局地最小值的无微分算法,在现代科学计算中得到广泛应用,该文提出了一种对NMS算法的改进方法。
双偏心块驱动球形机器人原地转向运动控制
双偏心块驱动球形机器人原地转向运动控制赵勃;李满天;孙立宁【摘要】Considering the turning in place motion as an independent motion which can enhance the mobility of spherical robot, a turning in place motion control method of two pendulums driven spherical robot is studied. First, the mechanism characteristics of two pendulums driven spherical robot are introduced, and then the force condition of turning in place motion is analyzed based on D~alembertg principle and the motion principle of turning in place motion of two pendulums driven spherical robot is discussed, finally, the dynamic model of turning in place motion is constructed. The whole process of turning in place motion is divided into three stages which are startup stage, stick stage and slip stage respectively, and a stick-slip principle for turning in place motion control is proposed. The effectiveness of the control method is validated by both simulation and prototype experiment.%为了提高球形机器人的运动性能,将原地转向运动作为一种独立的运动方式,研究了一种双偏心质量块驱动球形机器人的原地转向运动控制方法.介绍了双偏心质量块驱动球形机器入的机构特点,利用达朗伯原理对机器人进行受力分析,阐述了双偏心质量块驱动球形机器人原地转向运动原理,建立了机器人的原地转向动力学模型.将原地转向运动分为起始、粘滞、滑移3个阶段,提出了一种基于粘滑原理的球形机器人原地转向控制方法,并通过仿真和样机实验验证了控制方法的有效性.【期刊名称】《哈尔滨工业大学学报》【年(卷),期】2011(043)011【总页数】5页(P49-53)【关键词】球形机器人;双偏心质量块;原地转向;粘滑原理【作者】赵勃;李满天;孙立宁【作者单位】哈尔滨工业大学机器人技术与系统国家重点实验室,哈尔滨150080;哈尔滨工业大学机器人技术与系统国家重点实验室,哈尔滨150080;哈尔滨工业大学机器人技术与系统国家重点实验室,哈尔滨150080【正文语种】中文【中图分类】TP242近几年来,球形机器人作为一种新型移动机器人引起了研究人员越来越多的关注.与轮式、足式移动机器人相比,球形机器人运动灵活,可以实现全方位行走,能够在狭小空间内运动;球形的外壳能够保护内部机构,受碰撞后机器人姿态易于调整,使机器人可以在某些潮湿、多尘、崎岖的恶劣环境下作业[1-2].1999 年卡内基梅陇大学的Brian Chemel等[3]研制了 Cyclops球形机器人,首次将偏心质量块驱动机构应用于球形机器人.驱动单元采用两个垂直放置的电机控制偏心机构运动,通过改变机器人重心位置产生偏心作用力,打破球体的静态平衡实现滚动运动,现有的球形机器人大都采用这种驱动方式.球形机器人在运动时球壳与地面近似点接触,因此带来了运动学方面的非完整约束问题,而球形机器人系统的输入输出之间又存在着强烈的非线性问题,因此近年来球形机器人的研究热点集中于轨迹规划和运动控制.卡内基梅陇大学的Umashankar Nagarajan 等[4-5]研究了 ballbot球形足式机器人的控制方法.通过拉格朗日方程建立了机器人的动力学模型,根据动力学方程推导出机器人腿足之间的相对转角加速度与机器人倾角、倾斜速度之间的关系,提出了基于双曲正割函数的离线轨迹规划方法,并用Nelder-Mead算法对输入曲线进行优化.密歇根州立大学的Ranjan Mukherjee等[6]将球形机器人的运动控制问题与经典的球-平面系统相结合,建立了球形机器人的运动学模型,并用球面三角形法规划了球形机器人的运动轨迹,基于高斯-博内并行传输理论设计了机器人的一般运动控制方法[6].卡内基梅陇大学的Y S XU等[7]通过拉格朗日乘子法对单轮机器人Gyrover进行动力学建模,并用仿真和实验修正了动力学参数.通过对系统进行线性化处理,将机器人的滚动与侧倾运动解耦,由于机器人转向运动只与侧倾角度有关,因此设计了状态反馈控制器保持机器人稳定转向,以间接控制机器人的转弯速度.为了使机器人按照期望轨迹运动,建立了机器人滚动速度、侧倾角度与轨迹曲率半径的关系,并设计了速度反馈控制器确保机器人实际运动轨迹跟踪期望值[8].岳明等[9]研究了球形机器人的爬坡运动控制,基于耗散形式的拉格朗日方程建立了机器人爬坡的动力学模型,通过临界摆角将动力学方程线性化,设计了以能量耗散最小为目标函数的非线性系统控制器.孙汉旭等[10-11]建立了转动关节的摩擦力矩和球壳与地面之间的摩擦力偶,对球形机器人的动力学模型进行修正,设计了基于容错策略的球形机器人控制系统.现有对球形机器人的控制研究没有将球形机器人原地转向运动作为独立的运动方式进行控制,而原地转向运动是球形机器人特有的运动方式,能够使球形机器人在狭小空间内转弯,增强机器人的运动灵活性和环境适应能力.本文研究了一种双偏心质量块驱动球形机器人的原地转向运动控制方法,介绍了机器人的结构特点,并分析了其原地转向运动原理,根据达朗伯原理建立了机器人原地转向运动的动力学模型,提出了一种基于粘滑原理的球形机器人原地转向运动控制方法,最后通过仿真和样机实验验证了控制方法的有效性.1 双偏心质量块驱动单元结构机器人外壳呈椭球形,当机器人发生碰撞或从高处跌落时,这样的外形易于操作者观察到机器人当前的姿态;椭球形的外壳也限制了机器人横向滚动在一定的角度范围,在一定角度的斜坡上穿越时不会翻车.驱动单元是球形机器人的核心部分,现有的球形机器人大都采用了偏心质量块驱动方式,2个垂直放置的电机驱动一个偏心机构运动,分别控制机器人前进和转向,机器人运动灵活,能实现全方位行走.但这种驱动方式也有明显的不足,电机的驱动能力没有得到最大程度上的利用,因此机器人机动速度较慢,原地转向能力差. 设计了一种双偏心质量块驱动单元,其结构如图1所示.驱动单元有2个对轴放置的驱动电机,每个电机分别驱动一个偏心质量块,质量块只能绕电机轴旋转.2个质量块相对于球心对称放置在主轴上,每个偏心质量块质量为350 g,总质量占机器人质量的42.9%,与现有传统的偏心质量块驱动方式相比,这种改进的驱动方式能提供更大的偏心力矩和惯性力矩,使机器人有更快的速度和更灵活的转向能力. 图1 驱动单元结构这种改进的驱动单元也给球形机器人带来了特有的运动原理,如图2所示,分别为机器人运动的侧视图和俯视图.两个质量块m1和m2只能绕x轴转动,相对地面摆角分别为θ1和θ2时,机器人重心位置在MN和PQ交点O1处,当质量块m2摆角为θ3且与θ1反向时,机器人重心位置移动到MN与P'Q'交点O2处.由此可见,两质量块偏摆角度使机器人重心位置改变,但始终在MN上移动,即无论质量块如何偏摆,机器人所受偏心力作用点始终在MN上,产生的偏心力矩绕x轴,因此偏心作用力只能使机器人绕x轴滚动,不能使机器人转向.机器人转向运动需要依靠惯性力,当质量块与球壳相对加速旋转时,会产生平行于yoz平面的惯性力,惯性力可以分解为沿y、z轴的分力和绕x轴的力偶.沿y轴和z轴的分力分别产生绕z轴和y轴的惯性力矩,使机器人绕z轴和y轴旋转.图2 运动原理2 基于粘滑原理的原地转向控制2.1 原地转向运动原理原地转向运动是球形机器人特有的运动方式,可以使机器人在狭小空间内运动,增强其环境适应能力.双偏心质量块驱动球形机器人原地转向运动受力情况如图3所示.图3 原地转向运动受力分析两质量块反向旋转相同角度θ,保证角速度θ˙与加速度θ¨相同,因此惯性力Fg1与Fg2大小相等,方向为垂直于质量块转动半径.将惯性力分解为沿y轴和z轴的分力,其中分别产生绕x轴大小相等方向相反的惯性力矩与绕 y轴大小相等方向相反的惯性力矩Fyg2产生绕z轴大小相等方向相同的惯性力矩,式(1)为机器人受力情况,其中Mf为地面摩擦阻矩.由式(1)可以看出,机器人只受绕z轴的惯性力矩作用,其他方向上所受惯性力与力矩都平衡,因此机器人只有一种运动方式.当绕z轴的惯性力矩大于摩擦阻矩Mf 时,机器人做原地转向运动.2.2 原地转向动力学模型质量块相对球壳加速运动产生的惯性力为其中:r为质量块旋转半径,θ为质量块与球壳绕x轴的相对转角,在原地转向运动中,由于球壳不会绕y轴旋转,因此θ即为质量块转角.惯性力矩为其中d为质量块旋转中心到球心的距离.由达朗伯原理,得到机器人原地转向运动动力学方程如下:其中φ为机器人绕z轴的转角.2.3 基于粘滑原理的原地转向控制由原地转向动力学模型可知,可以通过控制质量块摆角θ控制机器人原地转向运动.从质量块的位置考虑,系统要求在转动的初始和终止时刻质量块都处于铅直位置,一方面可以使机器人在原地转向的终止时刻立即进入下一个运动状态的起始位置;另一方面可以在相同的初始位置控制质量块的运动.将原地转向运动分为3个阶段进行控制,分别为起始阶段、粘滞阶段、滑移阶段,其具体控制过程如下:1)起始阶段:保持两偏心质量块处于竖直位置,不施加任何驱动信号,机器人处于静止状态.2)粘滞阶段:0~t1时间段,给质量块施加一个缓慢上升的速度驱动信号,如图4所示,质量块开始绕x轴同步反相缓慢摆动,由于两质量块摆动产生的绕z轴的惯性力矩Mzg始终小于最大静摩擦阻矩Mf,即地面有能力提供球壳静止所需的摩擦阻矩,此时球壳将与地面保持静止,机器人处于粘滞状态,质量块旋转至θ角度,等待下一步控制信号.图4 粘滞阶段3)滑移阶段:在粘滞阶段的终了时刻t1,单摆的速度驱动信号急速下降,t1~t2时间段,两质量块从θ位置回摆到竖直位置,如图5所示,质量块产生的惯性力矩Mzg超过了球壳与地面间的最大静摩擦阻矩Mf,球壳做原地转向运动,机器人处于滑移阶段.当摩擦阻矩耗散掉机器人全部动能时,球壳停止运动,即重新回到静止阶段,如此一个原地转向运动周期结束.图5 滑移阶段2.4 原地转向运动控制仿真用Matlab对原地转向控制方法进行仿真,仿真时间为3 s,仿真中机器人参数如表1所示.表1 机器人参数参数质量块总质量/kg其他机构总质量/kg球壳转动惯量/(kg·m -2)质量块旋转半径/m质量块旋转中心到球心距离/m数值0.70 0.93 0.002 9 0.038 0.045摩擦阻矩模型为其中,Mstatic为静摩擦阻矩,Dv为黏性阻尼系数,在室内相对平坦的地面通过实验测得Mstatic=0.014 24 N·m,Dv=0.057 N·m·s/rad.仿真中摆角θ控制轨迹为其中,θm为质量块摆角最大值,ω为谐波频率,Kv为转速系数,可以通过调整Kv的大小控制质量块角速度的最大值,Kf为变频系数,可以改变滑移阶段质量块回摆时间,控制滑移阶段质量块产生惯性力的大小,取θm= π/6,ω = π/0.8,Kv=2,Kf=4,质量块摆角曲线与速度曲线如图6所示.摆角曲线上升时,机器人处于粘滞阶段,质量块先加速后减速,摆动到θm位置,摆角曲线下降时机器人处于滑移阶段,质量块先加速后减速回摆至竖直位置,质量块在滑移阶段的最大速度是粘滞阶段的4倍,最大加速度是粘滞阶段的16倍,也就是质量块在滑移阶段能产生16倍于粘滞阶段的惯性力,使机器人完成原地转向运动.机器人原地转向运动仿真结果如图7所示,实线和虚线分别为球壳绕z轴转角φ的位移曲线和速度曲线.可以看出,在0~0.8 s时间段,机器人处于粘滞阶段,球壳角位移为0,在0.8~1.0 s时间段,机器人处于滑移阶段,球壳先加速后减速,角速度最大值为2.74 rad/s,球壳角位移为0.28 rad,机器人原地转向运动周期为1 s.仿真中摩擦模型为理想模型,因此机器人进入粘滞阶段时立即停止转动,球壳角速度为零,角位移不变.图6 质量块摆角与角速度仿真曲线图7 球壳角位移与角速度曲线3 原地转向运动实验研究在室内地面进行了双偏心质量块驱动球形机器人原地转向运动实验研究,通过遥控机对机器人下达“原地转向”指令,实验中质量块输入信号及其参数设置与仿真中一致,实验结果如图8所示,机器人能完成原地转向运动.机器人原地转向角速度通过传感器测量结果如图9所示,机器人原地转向运动周期为1 s,质量块启动瞬间,由于角动量守恒,惯性力矩产生机器人反向的角速度,即在运动初始时刻机器人转向方向与期望方向相反,但这种反向运动在短时间内即可被地面摩擦力矩阻止.从图中可以看出,机器人在滑移阶段之后,转动角速度无法立即减为零,即实验中地面的摩擦阻矩无法使机器人在粘滞阶段的初始时刻立即静止,摩擦阻矩对机器人运动的阻止需要0.5 s的时间,因此机器人在粘滞阶段也有一小段角位移.实验中机器人除了做原地转向运动之外,还有周期性绕y轴的转动,即横滚运动,横滚角速度通过传感器测量,结果如图10所示.机器人原地转向运动通过2个质量块产生2个大小相等、方向相反的惯性力实现,而实验中无法保证2个质量块无误差的同步运动,因此沿z轴的惯性力产生了绕y轴不平衡的惯性力矩,使机器人有横滚运动.偏心质量块在滑移阶段产生最大惯性力,从图10中可以看出,机器人在滑移阶段的横滚角速度最大,最大值可达0.78 rad/s,粘滞阶段由于能量耗散,横滚角速度逐渐减小,但在0.8 s内无法减为零,机器人进入下一个滑移阶段.因此在原地转向运动过程中,机器人不可避免地带有横滚运动.图8 原地转向运动实验研究图9 球壳角速度图10 横滚角速度4 总结1)原地转向运动是球形机器人特有的运动,能够增加球形机器人的环境适应能力,本文将原地转向运动作为一种独立的运动方式,研究了双偏心质量块驱动球形机器人的原地转向运动控制方法.2)分析了机器人原地转向运动原理,利用达朗伯原理建立了机器人原地转向运动动力学模型,提出了一种基于粘滑原理的原地转向运动控制方法,并通过仿真从理论上证明了控制方法的正确性.3)进行了样机试验研究,分析了实验结果,通过实验验证了控制方法的有效性.参考文献:[1]HALME A,SCHONBERG T,WANG Y.Motion control of a spherical mobile robot[C]//IEEE International Workshop on Advanced Motion Control.MIE,Japan:IEEE,1996:259-264.[2]ARMOUR R H,VINCENT J F V.Rolling in Nature and Robotics:A Review[J].Journal of Bionic Engineering,2006,3(4):195-208.[3]CHEMEL B,MUTSCHLER E,SCHEMPF H.Cyclops:miniature robotic reconnaissance system[C]//IEEE International Conference on Robotics and Automation.Detroit,MI,USA:IEEE,1999:2298 -2302.[4]UMASHANKAR N,GEORGE K,RALPH L H.Trajectory planning and control of an underactuated dynamically stable single spherical wheeled mobile robot[C]//IEEE International Conference on Robotics and Automation.Kobe,Japan:IEEE,2009:3743-3748.[5]UMASHANKAR N,ANISH M,GEORGE K,et al.State transition,balancing,station keeping,and yaw control for a dynamically stable single spherical wheel mobile robot[C]//IEEE International Conference on Robotics and Automation.Kobe,Japan:IEEE,2009:998-1003.[6]MUKHERJEE R,MARK A M,PUKRUSHPAN J T.Motion planning for a spherical mobile robot:revisiting the classical ball-plate problem[J].Journal of Dynamic Systems,Measurement and Control,Transactions of the ASME,2002,124(4):502-511.[7]XU Y S,SAMUEL K W.Stabilization and path following of a single wheel robot[J].IEEE/ASME Transactions on Mechatronics,2004,9(2):407-419.[8]FERREIRA E,TSAI S J,PAREDIS C J J,et al.Control of the Gyrover:a single-wheel gyroscopically stabilized robot[J].Advanced Robotics,2000,14(6):459-475.[9]岳明,邓宗全.球形机器人爬坡状态下动力学建模及最优控制器设计[J].机械工程学报,2009,45(11):46-51.[10]孙汉旭,王亮清,贾庆轩,等.BYQ-3球形机器人的动力学模型[J].机械工程学报,2009,45(10):8-14.[11]孙汉旭,刘大亮,贾庆轩,等.基于容错策略的球形机器人控制系统[J].机械工程学报,2010,46(11):89-95.。
奈尔检验法python
奈尔检验法 Python 实现奈尔检验法是一种用于检测数据集中异常点的方法,本文将介绍如何使用Python 实现奈尔检验法下面是本店铺为大家精心编写的3篇《奈尔检验法Python 实现》,供大家借鉴与参考,希望对大家有所帮助。
《奈尔检验法 Python 实现》篇1奈尔检验法是一种基于距离度量的方法,用于检测数据集中的异常点。
该方法的基本思想是将数据点映射到高维空间中,通过计算每个数据点与其他数据点之间的距离来确定异常点。
在 Python 中,可以使用 scikit-learn 库中的 Kernel 方法来实现奈尔检验法。
下面是一个使用 Python 实现奈尔检验法的示例代码:``` pythonfrom sklearn.kernel_approximation import Kernelfrom sklearn.metrics import mean_squared_errorimport numpy as np# 数据集data = np.array([[0, 0], [1, 1], [2, 2], [3, 3], [4, 4], [5, 5], [6, 6], [7, 7], [8, 8], [9, 9]])# 创建核函数对象kernel = Kernel(kernel="linear", degree=1)# 计算核函数kernel_matrix = kernel.fit_transform(data)# 计算均值mean_kernel_matrix = np.mean(kernel_matrix, axis=0) # 计算方差var_kernel_matrix = np.var(kernel_matrix, axis=0)# 计算奈尔检验法结果nielsen_result = mean_squared_error(data,kernel_matrix)print("奈尔检验法结果:", nielsen_result)```在上述代码中,我们首先定义了一个数据集,然后创建了一个核函数对象,并使用该对象计算核函数。
CST STUDIO SUITE 2009中的新优化算法
Particle Swarm Optimization
Nelder-Mead Simplex Interpolated Quasi-Newton
Examples and comparison
Equivalent circuit of an inductor Dual-band matching circuit network Planar filter tuning Convergence Problem
15
UGM 2009, Tuesday 17th March, Darmstadt
Example 2: Dual-Band Matching Circuit Network
16
UGM 2009, Tuesday 17th March, Darmstadt
Example 1: Optimizer setting
Lp initial = 65 nH; (60-70 nH), Cp initial = 0 pF; (0-0.3 pF)
14
UGM 2009, Tuesday 17th March, Darmstadt
Example 1: Results
The values of the best result (Simplex method)
20
UGM 2009, Tuesday 17th March, Darmstadt
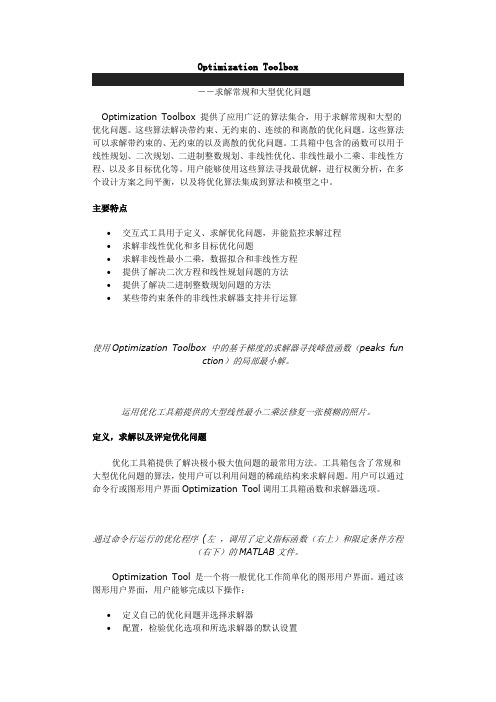
Example 3: Comparison of methods
Goal value
5,0 4,5 4,0 3,5 3,0 2,5 2,0 1,5 1,0 0,5 0,0
Excluded initial point, terminated by maximal number of evaluation.
基于Isight和Abaqus缩短涡轮叶片燕尾榫结构优化设计周期

Shortening the Optimization Design Cycle of Dovetail Geometries of Turbine Blades Based on Isight and AbaqusYan-fei YuWei Zhang(Dassault Syst èmes)Abstract:In this paper,Abaqus software is used to analyze the minimum contact pressure and stress around the dovetail of typical turbine blades,and the simulation process automation and optimization design are studied based on the multidisciplinary optimization design platform Isight,in order to find an efficient optimization design scheme on the premise of meeting the design requirements.At the beginning of the design,a variety of algorithms provided by Isight were used for optimization design,and the optimization results and time of different algorithms were compared.It was found that although the optimization time of Nonlinear Sequential Quadratic Programming (NLPQLP)and Downhill Simplex was short,the optimization results fell into local optimization,and the optimization results of Multi-Island Genetic Algorithm (MIGA)and the Non-dominated Sorting Genetic Algorithm (NSGA-II)were ideal,but the optimization efficiency is low.On this basis,two improvement schemes are proposed.First,based on the tools provided by Isight,the Optimal Latin Hypercube is used to collect design samples to create an agent model,and then the agent model is used for further optimization.In the second way,a combination optimization strategy is adopted.First,MIGA or NSGA-II is used for a small amount of global optimization,and then the optimization results are used as the initial scheme for the next optimization.NLPQLP and Downhill Simplex are used for local optimization.Finally,the optimization results and efficiency of various schemes are compared and evaluated.Keywords:Downhill-Simplex;NLPQLP;NSGA-II;MIGA;Kriging;CPRESS;Von-Mises摘要:采用Abaqus 软件对典型涡轮叶片燕尾榫结构周围的最小接触压力和应力进行有限元分析,并基于Isight 软件进行仿真流程自动化和优化设计研究,以期在满足设计要求的前提下,找到一种高效的优化设计方案。
英语翻译
Determination of Model Coefficients模型系数的测定Modified HN Model Coefficients修改HN模型系数Three hot-mix asphalt (HMA) mixtures were used in this study, namely, a stone mastic asphalt (SMA) with a nominal maximum aggregate size (NMAS) of 12.5 mm and two Superpave mixtures with 19 and 25 mm NMAS, respectively. The three mixtures are referred to as SMA 12.5, Superpave 19, and Superpave 25, respectively. An SBS modified PG 76-22 binder was used for the SMA 12.5 and Superpave 19 mixtures, whereas a neat PG 64-22 binder was used for the Superpave 25 mixture. All specimens were compacted by using a Superpave gyratory compactor and were cored and cut to a diameter of 100 mm and a height of 150 mm for testing. The test was performed in a stress-controlled compressive mode by following the general guidelines specified in AASHTO TP 62-07 (2007). Complex moduli were measured at five temperatures (4, 15, 25, 40, and 55°C) and seven frequencies (25, 20, 10, 5, 1, 0.5, and 0.1 Hz). The vertical load was adjusted for each testing condition to produce strain amplitudes of approximately 50–80 and to limit the total accumulated strain within 1,500. Three replicates were tested for each mixture. The dynamic modulus and phase angle were obtained from the tests by using the standard technique given in AASHTO TP 62-07 (2007). Detailed information about the material testing can be found in the study by Zhao and Bai (2007).模型系数的测定修改HN模型系数在这项研究中,使用三个热拌沥青混合料(HMA)的混合物,即一石沥青玛蹄脂(SMA)与标称最大骨料粒径为12.5毫米(NMAS)和两个分别为19和25毫米NMAS,Superpave的混合物。
基于轮胎六分力测试的PAC2002轮胎模型参数辨识方法研究
图 3 侧偏力辨识结果
图 4 纵向力辨识结果
图 2 辨识流程图
图 5 复合工况侧偏力辨识结果
63
汽车实用技术
作为对比,同时采用传统的单一辨识算法,例如遗传算 法对轮胎模型参数进行参数辨识,侧偏力、纵向力、回正力 矩参数的辨识误差如表 7 所示。可以看出通过新型辨识方法 得到的辨识结果比传统算法得到的结果更可靠,其误差更低。
10.16638/ki.1671-7988.2018.15.023
基于轮胎六分力测试的 PAC2002 轮胎模型参数 辨识方法研究
程泽木 1,姜俊昭 2,蔡金文 2,卢剑伟 2*
(1.安徽江淮汽车集团股份有限公司,安徽 合肥 230091;2.合肥工业大学汽车与交通工程学院,安徽 合肥 230009)
滑移率是否超过系统设定的滑移率门限值,若低于滑移率门 3 结束语
限值λmax,则电磁阀转到减压状态,由于制动压力下降,车 轮减速度也会变小,直至(-a)信号出现。在后续的保压状 态下,由于车轮惯性作用,车轮加速度增加直至超过门限值 (+a)(该门限值用于判断低附着系数路面),随后制动压力 一直保持不变。只有在加速度超过较高的门限值(+A)(表明 是高附着系数路面),制动压力再次增加,当车轮加速度再次 回到(+A)时,电磁阀进入保压状态,车轮加速度逐渐回落 到(+a)值,由于此时在滑移率附着系数曲线峰值附近,制
表 7 不同算法的辨识误差对比
全局最优,防止了局部收敛等问题的出现。同时,该方法综 合利用了多种算法的优点,较好地解决了复杂工况下非线性 轮胎模型参数辨识精度与效率无法统一的问题。
参考文献
[1] 胥永宫.轿车轮胎操纵稳定性匹配研究[D].长春:吉林大学,2011.