Fuzzy Control in Boiler
自动化专业毕业论文外文文献翻译

目录Part 1 PID type fuzzy controller and parameters adaptive method (1)Part 2 Application of self adaptation fuzzy-PID control for main steam temperature control system in power station (7)Part 3 Neuro-fuzzy generalized predictive control of boiler steam temperature ..................................................................... (13)Part 4 为Part3译文:锅炉蒸汽温度模糊神经网络的广义预测控制21Part 1 PID type fuzzy controller and Parametersadaptive methodWu zhi QIAO, Masaharu MizumotoAbstract: The authors of this paper try to analyze the dynamic behavior of the product-sum crisp type fuzzy controller, revealing that this type of fuzzy controller behaves approximately like a PD controller that may yield steady-state error for the control system. By relating to the conventional PID control theory, we propose a new fuzzy controller structure, namely PID type fuzzy controller which retains the characteristics similar to the conventional PID controller. In order to improve further the performance of the fuzzy controller, we work out a method to tune the parameters of the PID type fuzzy controller on line, producing a parameter adaptive fuzzy controller. Simulation experiments are made to demonstrate the fine performance of these novel fuzzy controller structures.Keywords: Fuzzy controller; PID control; Adaptive control1. IntroductionAmong various inference methods used in the fuzzy controller found in literatures , the most widely used ones in practice are the Mamdani method proposed by Mamdani and his associates who adopted the Min-max compositional rule of inference based on an interpretation of a control rule as a conjunction of the antecedent and consequent, and the product-sum method proposed by Mizumoto who suggested to introduce the product and arithmetic mean aggregation operators to replace the logical AND (minimum) and OR (maximum) calculations in the Min-max compositional rule of inference.In the algorithm of a fuzzy controller, the fuzzy function calculation is also a complicated and time consuming task. Tagagi and Sugeno proposed a crisp type model in which the consequent parts of the fuzzy control rules are crisp functional representation or crisp real numbers in the simplified case instead of fuzzy sets . With this model of crisp real number output, the fuzzy set of the inference consequence willbe a discrete fuzzy set with a finite number of points, this can greatly simplify the fuzzy function algorithm.Both the Min-max method and the product-sum method are often applied with the crisp output model in a mixed manner. Especially the mixed product-sum crisp model has a fine performance and the simplest algorithm that is very easy to be implemented in hardware system and converted into a fuzzy neural network model. In this paper, we will take account of the product-sum crisp type fuzzy controller.2. PID type fuzzy controller structureAs illustrated in previous sections, the PD function approximately behaves like a parameter time-varying PD controller. Since the mathematical models of most industrial process systems are of type, obviously there would exist an steady-state error if they are controlled by this kind of fuzzy controller. This characteristic has been stated in the brief review of the PID controller in the previous section.If we want to eliminate the steady-state error of the control system, we can imagine to substitute the input (the change rate of error or the derivative of error) of the fuzzy controller with the integration of error. This will result the fuzzy controller behaving like a parameter time-varying PI controller, thus the steady-state error is expelled by the integration action. However, a PI type fuzzy controller will have a slow rise time if the P parameters are chosen small, and have a large overshoot if the P or I parameters are chosen large. So there may be the time when one wants to introduce not only the integration control but the derivative control to the fuzzy control system, because the derivative control can reduce the overshoot of the system's response so as to improve the control performance. Of course this can be realized by designing a fuzzy controller with three inputs, error, the change rate of error and the integration of error. However, these methods will be hard to implement in practice because of the difficulty in constructing fuzzy control rules. Usually fuzzy control rules are constructed by summarizing the manual control experience of an operator who has been controlling the industrial process skillfully and successfully. The operator intuitively regulates the executor to control the process by watching theerror and the change rate of the error between the system's output and the set-point value. It is not the practice for the operator to observe the integration of error. Moreover, adding one input variable will greatly increase the number of control rules, the constructing of fuzzy control rules are even more difficult task and it needs more computation efforts. Hence we may want to design a fuzzy controller that possesses the fine characteristics of the PID controller by using only the error and the change rate of error as its inputs.One way is to have an integrator serially connected to the output of the fuzzy controller as shown in Fig. 1. In Fig. 1,1K and 2K are scaling factors for e and ~ respectively, and fl is the integral constant. In the proceeding text, for convenience, we did not consider the scaling factors. Here in Fig. 2, when we look at the neighborhood of NODE point in the e - ~ plane, it follows from (1) that the control input to the plant can be approximated by(1)Hence the fuzzy controller becomes a parameter time-varying PI controller, itsequivalent proportional control and integral control components are BK2D and ilK1 P respectively. We call this fuzzy controller as the PI type fuzzy controller (PI fc). We can hope that in a PI type fuzzy control system, the steady-state error becomes zero.To verify the property of the PI type fuzzy controller, we carry out some simulation experiments. Before presenting the simulation, we give a description of the simulation model. In the fuzzy control system shown in Fig. 3, the plant model is a second-order and type system with the following transfer function:)1)(1()(21++=s T s T K s G (2) Where K = 16, 1T = 1, and 2T = 0.5. In our simulation experiments, we use thediscrete simulation method, the results would be slightly different from that of a continuous system, the sampling time of the system is set to be 0.1 s. For the fuzzy controller, the fuzzy subsets of e and d are defined as shown in Fig. 4. Their coresThe fuzzy control rules are represented as Table 1. Fig. 5 demonstrates the simulation result of step response of the fuzzy control system with a Pl fc. We can see that the steady-state error of the control system becomes zero, but when the integration factor fl is small, the system's response is slow, and when it is too large, there is a high overshoot and serious oscillation. Therefore, we may want to introduce the derivative control law into the fuzzy controller to overcome the overshoot and instability. We propose a controller structure that simply connects the PD type and the PI type fuzzy controller together in parallel. We have the equivalent structure of that by connecting a PI device with the basic fuzzy controller serially as shown in Fig.6. Where ~ is the weight on PD type fuzzy controller and fi is that on PI type fuzzy controller, the larger a/fi means more emphasis on the derivative control and less emphasis on the integration control, and vice versa. It follows from (7) that the output of the fuzzy controller is(3)3. The parameter adaptive methodThus the fuzzy controller behaves like a time-varying PID controller, its equivalent proportional control, integral control and derivative control components are respectively. We call this new controller structure a PID type fuzzy controller (PID fc). Figs. 7 and 8 are the simulation results of the system's step response of such control system. The influence of ~ and fl to the system performance is illustrated. When ~ > 0 and/3 = 0, meaning that the fuzzy controller behaves like PD fc, there exist a steady-state error. When ~ = 0 and fl > 0, meaning that the fuzzy controller behaves like a PI fc, the steady-state error of the system is eliminated but there is a large overshoot and serious oscillation.When ~ > 0 and 13 > 0 the fuzzy controller becomes a PID fc, the overshoot is substantially reduced. It is possible to get a comparatively good performance by carefully choosing the value of αandβ.4. ConclusionsWe have studied the input-output behavior of the product-sum crisp type fuzzy controller, revealing that this type of fuzzy controller behaves approximately like a parameter time-varying PD controller. Therefore, the analysis and designing of a fuzzy control system can take advantage of the conventional PID control theory. According to the coventional PID control theory, we have been able to propose some improvement methods for the crisp type fuzzy controller.It has been illustrated that the PD type fuzzy controller yields a steady-state error for the type system, the PI type fuzzy controller can eliminate the steady-state error. We proposed a controller structure, that combines the features of both PD type and PI type fuzzy controller, obtaining a PID type fuzzy controller which allows the control system to have a fast rise and a small overshoot as well as a short settling time.To improve further the performance of the proposed PID type fuzzy controller, the authors designed a parameter adaptive fuzzy controller. The PID type fuzzy controller can be decomposed into the equivalent proportional control, integral control and the derivative control components. The proposed parameter adaptive fuzzy controller decreases the equivalent integral control component of the fuzzy controller gradually with the system response process time, so as to increase the damping of the system when the system is about to settle down, meanwhile keeps the proportional control component unchanged so as to guarantee quick reaction against the system's error. With the parameter adaptive fuzzy controller, the oscillation of the system is strongly restrained and the settling time is shortened considerably.We have presented the simulation results to demonstrate the fine performance of the proposed PID type fuzzy controller and the parameter adaptive fuzzy controller structure.Part 2 Application of self adaptation fuzzy-PID control for main steam temperature control system inpower stationZHI-BIN LIAbstract: In light of the large delay, strong inertia, and uncertainty characteristics of main steam temperature process, a self adaptation fuzzy-PID serial control system is presented, which not only contains the anti-disturbance performance of serial control, but also combines the good dynamic performance of fuzzy control. The simulation results show that this control system has more quickly response, better precision and stronger anti-disturbance ability.Keywords:Main steam temperature;Self adaptation;Fuzzy control;Serial control1. IntroductionThe boiler superheaters of modem thermal power station run under the condition of high temperature and high pressure, and the superheater’s temperature is highest in the steam channels.so it has important effect to the running of the whole thermal power station.If the temperature is too high, it will be probably burnt out. If the temperature is too low ,the efficiency will be reduced So the main steam temperature mast be strictly controlled near the given value.Fig l shows the boiler main steam temperature system structure.Fig.1 boiler main steam temperature systemIt can be concluded from Fig l that a good main steam temperature controlsystem not only has adequately quickly response to flue disturbance and load fluctuation, but also has strong control ability to desuperheating water disturbance. The general control scheme is serial PID control or double loop control system with derivative. But when the work condition and external disturbance change large, the performance will become instable. This paper presents a self adaptation fuzzy-PID serial control system. which not only contains the anti-disturbance performance of serial control, but also combines the good dynamic character and quickly response of fuzzy control .1. Design of Control SystemThe general regulation adopts serial PID control system with load feed forward .which assures that the main steam temperature is near the given value 540℃in most condition .If parameter of PID control changeless and the work condition and external disturbance change large, the performance will become in stable .The fuzzy control is fit for controlling non-linear and uncertain process. The general fuzzy controller takes error E and error change ratio EC as input variables .actually it is a non-linear PD controller, so it has the good dynamic performance .But the steady error is still in existence. In linear system theory, integral can eliminate the steady error. So if fuzzy control is combined with PI control, not only contains the anti-disturbance performance of serial control, but also has the good dynamic performance and quickly response.In order to improve fuzzy control self adaptation ability, Prof .Long Sheng-Zhao and Wang Pei-zhuang take the located in bringing forward a new idea which can modify the control regulation online .This regulation is:]1,0[,)1(∈-+=αααEC E UThis control regulation depends on only one parameter α.Once αis fixed .the weight of E and EC will be fixed and the self adaptation ability will be very small .It was improved by Prof. Li Dong-hui and the new regulation is as follow;]1,0[,,,3,)1(2,)1(1,)1(0,)1({321033221100∈±=-+±=-+±=-+=-+=ααααααααααααE EC E E EC E E EC E E EC E UBecause it is very difficult to find a self of optimum parameter, a new method is presented by Prof .Zhou Xian-Lan, the regulation is as follow:)0(),ex p(12>--=k ke αBut this algorithm still can not eliminate the steady error .This paper combines this algorithm with PI control ,the performance is improved .2. Simulation of Control System3.1 Dynamic character of controlled objectPapers should be limited to 6 pages Papers longer than 6 pages will be subject to extra fees based on their length .Fig .2 main steam temperature control system structureFig 2 shows the main steam temperature control system structure ,)(),(21s W s W δδare main controller and auxiliary controller,)(),(21s W s W o o are characters of the leading and inertia sections,)(),(21s W s W H H are measure unit.3.2 Simulation of the general serial PID control systemThe simulation of the general serial PID control system is operated by MATLAB, the simulation modal is as Fig.3.Setp1 and Setp2 are the given value disturbance and superheating water disturb & rice .PID Controller1 and PID Controller2 are main controller and auxiliary controller .The parameter value which comes from references is as follow :667.37,074.0,33.31)(25)(111111122===++===D I p D I p p k k k s k sk k s W k s W δδFig.3. the general PID control system simulation modal3.3 Simulation of self adaptation fuzzy-PID control system SpacingThe simulation modal is as Fig 4.Auxiliary controller is:25)(22==p k s W δ.Main controller is Fuzzy-PI structure, and the PI controller is:074.0,33.31)(11111==+=I p I p k k s k k s W δFuzzy controller is realized by S-function, and the code is as fig.5.Fig.4. the fuzzy PID control system simulation modalFig 5 the S-function code of fuzzy control3.4 Comparison of the simulationGiven the same given value disturbance and the superheating water disturbance,we compare the response of fuzzy-PID control system with PID serial control system. The simulation results are as fig.6-7.From Fig6-7,we can conclude that the self adaptation fuzzy-PID control system has the more quickly response, smaller excess and stronger anti-disturbance.4. Conclusion(1)Because it combines the advantage of PID controller and fuzzy controller, theself adaptation fuzzy-PID control system has better performance than the general PID serial control system.(2)The parameter can self adjust according to the error E value. so this kind of controller can harmonize quickly response with system stability.Part 3 Neuro-fuzzy generalized predictive controlof boiler steam temperatureXiangjie LIU, Jizhen LIU, Ping GUANAbstract: Power plants are nonlinear and uncertain complex systems. Reliable control of superheated steam temperature is necessary to ensure high efficiency and high load-following capability in the operation of modern power plant. A nonlinear generalized predictive controller based on neuro-fuzzy network (NFGPC) is proposed in this paper. The proposed nonlinear controller is applied to control the superheated steam temperature of a 200MW power plant. From the experiments on the plant and the simulation of the plant, much better performance than the traditional controller is obtained.Keywords: Neuro-fuzzy networks; Generalized predictive control; Superheated steam temperature1. IntroductionContinuous process in power plant and power station are complex systems characterized by nonlinearity, uncertainty and load disturbance. The superheater is an important part of the steam generation process in the boiler-turbine system, where steam is superheated before entering the turbine that drives the generator. Controlling superheated steam temperature is not only technically challenging, but also economically important.From Fig.1,the steam generated from the boiler drum passes through the low-temperature superheater before it enters the radiant-type platen superheater. Water is sprayed onto the steam to control the superheated steam temperature in both the low and high temperature superheaters. Proper control of the superheated steam temperature is extremely important to ensure the overall efficiency and safety of the power plant. It is undesirable that the steam temperature is too high, as it can damage the superheater and the high pressure turbine, or too low, as it will lower the efficiency of the power plant. It is also important to reduce the temperaturefluctuations inside the superheater, as it helps to minimize mechanical stress that causes micro-cracks in the unit, in order to prolong the life of the unit and to reduce maintenance costs. As the GPC is derived by minimizing these fluctuations, it is amongst the controllers that are most suitable for achieving this goal.The multivariable multi-step adaptive regulator has been applied to control the superheated steam temperature in a 150 t/h boiler, and generalized predictive control was proposed to control the steam temperature. A nonlinear long-range predictive controller based on neural networks is developed into control the main steam temperature and pressure, and the reheated steam temperature at several operating levels. The control of the main steam pressure and temperature based on a nonlinear model that consists of nonlinear static constants and linear dynamics is presented in that.Fig.1 The boiler and superheater steam generation process Fuzzy logic is capable of incorporating human experiences via the fuzzy rules. Nevertheless, the design of fuzzy logic controllers is somehow time consuming, as the fuzzy rules are often obtained by trials and errors. In contrast, neural networks not only have the ability to approximate non-linear functions with arbitrary accuracy, they can also be trained from experimental data. The neuro-fuzzy networks developed recently have the advantages of model transparency of fuzzy logic and learning capability of neural networks. The NFN is have been used to develop self-tuning control, and is therefore a useful tool for developing nonlinear predictive control. Since NFN is can be considered as a network that consists of several local re-gions, each of which contains a local linear model, nonlinear predictive control based onNFN can be devised with the network incorporating all the local generalized predictive controllers (GPC) designed using the respective local linear models. Following this approach, the nonlinear generalized predictive controllers based on the NFN, or simply, the neuro-fuzzy generalized predictive controllers (NFG-PCs)are derived here. The proposed controller is then applied to control the superheated steam temperature of the 200MW power unit. Experimental data obtained from the plant are used to train the NFN model, and from which local GPC that form part of the NFGPC is then designed. The proposed controller is tested first on the simulation of the process, before applying it to control the power plant.2. Neuro-fuzzy network modellingConsider the following general single-input single-output nonlinear dynamic system:),1(),...,(),(),...,1([)(''+-----=uy n d t u d t u n t y t y f t y ∆+--/)()](),...,1('t e n t e t e e (1)where f[.]is a smooth nonlinear function such that a Taylor series expansion exists, e(t)is a zero mean white noise and Δis the differencing operator,''',,e u y n n n and d are respectively the known orders and time delay of the system. Let the local linear model of the nonlinear system (1) at the operating point )(t o be given by the following Controlled Auto-Regressive Integrated Moving Average (CARIMA) model:)()()()()()(111t e z C t u z B z t y z A d ----+∆= (2) Where )()(),()(1111----∆=z andC z B z A z A are polynomials in 1-z , the backward shift operator. Note that the coefficients of these polynomials are a function of the operating point )(t o .The nonlinear system (1) is partitioned into several operating regions, such that each region can be approximated by a local linear model. Since NFN is a class of associative memory networks with knowledge stored locally, they can be applied to model this class of nonlinear systems. A schematic diagram of the NFN is shown in Fig.2.B-spline functions are used as the membership functions in theNFN for the following reasons. First, B-spline functions can be readily specified by the order of the basis function and the number of inner knots. Second, they are defined on a bounded support, and the output of the basis function is always positive, i.e.,],[,0)(j k j j k x x λλμ-∉=and ],[,0)(j k j j k x x λλμ-∈>.Third, the basis functions form a partition of unity, i.e.,.][,1)(min,∑∈≡j mam j k x x x x μ(3)And fourth, the output of the basis functions can be obtained by a recurrence equation.Fig. 2 neuro-fuzzy network The membership functions of the fuzzy variables derived from the fuzzy rules can be obtained by the tensor product of the univariate basis functions. As an example, consider the NFN shown in Fig.2, which consists of the following fuzzy rules: IF operating condition i (1x is positive small, ... , and n x is negative large),THEN the output is given by the local CARIMA model i:...)()(ˆ...)1(ˆ)(ˆ01+-∆+-++-=d t u b n t y a t y a t yi i a i in i i i a )(...)()(c i in i b i in n t e c t e n d t u b c b -+++--∆+ (4)or )()()()()(ˆ)(111t e z C t u z B z t yz A i i i i d i i ----+∆= (5) Where )()(),(111---z andC z B z A i i i are polynomials in the backward shift operator 1-z , and d is the dead time of the plant,)(t u i is the control, and )(t e i is a zero mean independent random variable with a variance of 2δ. The multivariate basis function )(k i x a is obtained by the tensor products of the univariate basis functions,p i x A a nk k i k i ,...,2,1,)(1==∏=μ (6)where n is the dimension of the input vector x , and p , the total number of weights in the NFN, is given by,∏=+=nk i i k R p 1)( (7)Where i k and i R are the order of the basis function and the number of inner knots respectively. The properties of the univariate B-spline basis functions described previously also apply to the multivariate basis function, which is defined on the hyper-rectangles. The output of the NFN is,∑∑∑=====p i i i p i ip i i i a y aa yy 111ˆˆˆ (8) 3. Neuro-fuzzy modelling and predictive control of superheatedsteam temperatureLet θbe the superheated steam temperature, and θμ, the flow of spray water to the high temperature superheater. The response of θcan be approximated by a second order model:The linear models, however, only a local model for the selected operating point. Since load is the unique antecedent variable, it is used to select the division between the local regions in the NFN. Based on this approach, the load is divided into five regions as shown in Fig.3,using also the experience of the operators, who regard a load of 200MW as high,180MW as medium high,160MW as medium,140MW as medium low and 120MW as low. For a sampling interval of 30s , the estimated linear local models )(1-z A used in the NFN are shown in Table 1.Fig. 3 Membership function for local modelsTable 1 Local CARIMA models in neuro-fuzzy modelCascade control scheme is widely used to control the superheated steam temperature. Feed forward control, with the steam flow and the gas temperature as inputs, can be applied to provide a faster response to large variations in these two variables. In practice, the feed forward paths are activated only when there are significant changes in these variables. The control scheme also prevents the faster dynamics of the plant, i.e., the spray water valve and the water/steam mixing, from affecting the slower dynamics of the plant, i.e., the high temperature superheater. With the global nonlinear NFN model in Table 1, the proposed NFGPC scheme is shown in Fig.4.Fig. 4 NFGPC control of superheated steam temperature with feed-for-ward control.As a further illustration, the power plant is simulated using the NFN model given in Table 1,and is controlled respectively by the NFGPC, the conventional linear GPC controller, and the cascaded PI controller while the load changes from 160MW to 200MW.The conventional linear GPC controller is the local controller designed for the“medium”operating region. The results are shown in Fig.5,showing that, as expected, the best performance is obtained from the NFGPC as it is designed based on a more accurate process model. This is followed by the conventional linear GPC controller. The performance of the conventional cascade PI controller is the worst, indicating that it is unable to control satisfactory the superheated steam temperature under large load changes. This may be the reason for controlling the power plant manually when there are large load changes.Fig.5 comparison of the NFGPC, conventional linear GPC, and cascade PI controller.4. ConclusionsThe modeling and control of a 200 MW power plant using the neuro-fuzzy approach is presented in this paper. The NFN consists of five local CARIMA models.The out-put of the network is the interpolation of the local models using memberships given by the B-spline basis functions. The proposed NFGPC is similarly constructed, which is designed from the CARIMA models in the NFN. The NFGPC is most suitable for processes with smooth nonlinearity, such that its full operating range can be partitioned into several local linear operating regions. The proposed NFGPC therefore provides a useful alternative for controlling this class of nonlinear power plants, which are formerly difficult to be controlled using traditional methods.Part 4 为Part3译文:锅炉蒸汽温度模糊神经网络的广义预测控制Xiangjie LIU, Jizhen LIU, Ping GUAN摘要:发电厂是非线性和不确定性的复杂系统。
常见英文缩写(DCS、PLC)
HMI—Human Machine Interface(人机界面)HTML—Hyper Text Markup Language(超文本链接标示语言)CM——Control Module控制模块SCM——Sequential Control Module顺序控制模块CPM——Control Processing Module控制处理模块CEE——Control Execution Environment控制执行环境CNI——Control Net Interface控制网络接口C200——Control processor控制处理器RM——Redundancy Module冗余模块IOMs——input/output Modules输入/输出模块SCE——Simulation Control Module模拟控制模块ACE——Application Control Module应用控制模块IOLIM——IO Link Interface Module接口模块FIM——Fieldbus Inerface Module现场总线模块PMIO—Process Manager Input/Output流程管理器输入/输出FTA-Field Termination AssembliesIOP——Input/Output Processor (card)输入/输出处理器(卡)ERDB——Engineering Repository Database工程数据库EMDB—Enterprise model database企业模型数据库RTDB—Real Time Database实时数据库ODBC—Open Database Connectivity开放式数据库连接SQL—Structured Query Language结构化查询语言PV—Process Value工艺价值SCADA—Supervisory control and data acquisition监督控制和数据采集FTE-fault tolerant Ethernet容错以太网CP-control processor控制处理器CNI-control net interface控制网接口FTEB-fault tolerant Ethernet bridge容错以太网桥RM-redundancy module冗余模块FIM-fieldbus interface module现场总线接口模块OPC-OLE for process control用于过程控制ACE-application control environment(应用控制环境)DSA-distributed system architecture分布式系统架构CEE-control execute environment控制执行环境ES-CE --Console Extension Station控制扩展控制站ES-F --Experion Flex StationES-C --Experion Console StationFT A--Field T ermination Assembly (for Serial Interface) CDA server :Contorl Data Access Server 控制数据接入服务器OPC:OLE for process controlDSA:disbuted system Architecture 分布式系统结构FTE:fault tolerant Ethernet 容错以太网RTD:热电阻T/C:热电偶PIM:pulse Input Module 脉冲输入模块SIM:Serial Interface Module 串口接口模块SIEMENS PLC常用英语缩写表集散控制系统——Distributed Control System(DCS)现场总线控制系统——Fieldbus Control System(FCS)监控及数据采集系统——Supervisory Control And Data Acqusition(SCADA)可编程序控制器——Programmable Logic Controller(PLC)可编程计算机控制器——Programmable Computer Controller(PCC)工厂自动化——Factory Automation(FA)过程自动化——Process Automation(PA)办公自动化——Office Automation(OA)管理信息系统——Management Information System(MIS)楼宇自动化系统——Building Automation System人机界面——Human Machine Interface(HMI)工控机——Industrial Personal Computer(IPC)单片机——Single Chip Microprocessor计算机数控(CNC)远程测控终端——Remote Terminal Unit(RTU)上位机——Supervisory Computer图形用户界面(GUI)人工智能——Artificial Intelligent(AI)智能终端——Intelligent Terminal模糊控制——Fuzzy Control组态——Configuration仿真——Simulation冗余——Redundant客户/服务器——Client/Server网络——Network设备网——DeviceNET基金会现场总线——foundation fieldbus(FF)现场总线——Fieldbus以太网——Ethernet变频器——Inverter脉宽调制——Pulse Width Modulation(PWM)伺服驱动器——Servo Driver软起动器——Soft Starter步进——Step-by-Step控制阀——Control V alver流量计——Flowmeter仪表——Instrument记录仪—— Recorder传感器——Sensor智能传感器——Smart Sensor智能变送器——Smart Transducer虚拟仪器——V irtual Instrument主站/从站——Master Station/Slave station操作员站/工程师站/管理员站——Operator Station/Engineer Station/Manager StationDCS画面常用常用缩写词语1ST1级FRQ频率A报警FSH末级过热器ADS自动调度系统FSSS炉膛安全监测系统AGC自动发电机控制FW给水AH空气预热器FWP给水泵AS轴向位移GC高压调门控制ATC汽轮机自动控制GEN发电机AUTO自动GV(高压)调节汽门AUX辅助的HH高高BASE基本HAV暖通BCP炉水循环泵HDR联箱,集箱BD排污HP高压缸BF锅炉跟随HTR加热器BFP锅炉给水泵IC中压调门控制BMCR锅炉最大连续出力ID标志,标识BMP燃烧器管理系统IDF引风机BOP轴承油泵IMP冲动式(级)BP旁路INCR提高,增加BRG轴承INTERM定期,间断BTG锅炉-汽机-发电机IV中压调门C切换LL低低CAF冷却风机LDC负荷指令计算机CAMP控制+报警+监测+保护LOP顶轴油泵CCCW闭式循环冷却水Lp低压CCS协调控制系统LSH低温过热器CDSR凝汽器LUB润滑油COND凝结MANU手动(方式)CON连续的MCR最大连续出力COOR连续的MCS模拟量控制系统CORR校正,修正MEH小型汽轮机电液调节CRT显示器MFT主燃料失去保护CRH低温再热器MIN最小CSH包覆过热器MS主蒸汽CW循环水MW兆瓦D NO编号,第。
DL701火力发电厂热工自动化术语
☿থϹॖ⛁ᎹႮࡼ࣪ᴃ᪱DL/T701-1999থᜬᯊⒸ:2002-1-15Ё ढҎ ⇥ ݅ Ϲ ᜐ Ϯ ᷛ ޚথϹॖThermopower automation-vocabularyfor fossil fired power plant2000-02-24থᏗ2000-07-01ЁढҎ⇥݅ᆊথᏗࠡᣄϹᎹϮᾬ[1995]44ϹᜐϮᷛޚᩥՈᅝՈDŽˈ៥☿থϹॖՈৡDŽϵՈᆊˈּՈৡˈˈᕜDŽЎ┉ǃݙՈѸˈᔶՈᩨˊˈේᷛޚDŽᷛޚՈЁ“Ҿᜬ”ՈᾬGB/T13983-92GB/T13283-91ՈᴵDŽ ᷛޚՈ┈AՈ┈DŽᷛޚϵϹᎹϮᾬᷛޚ࣪DŽ ᷛޚ᰻˖ЁϹᴎЁᖗDŽ ҎDŽ ϹᎹϮᾬᷛޚ࣪DŽֲࠡ ᇇᓩϬᷛޚᴀᴃ☿থϬᴃ┈$˄ᦤ߾Ո┈˅ ᆵᴀᷛޚᢈথϬՈᴃˈৃᩥǃᅝǃˊᮍՈ᭛ӊϬ᪱DŽϟ߫ޚ᠔Ոᴵ᭛ˈỞᴀᷛޚЁϬ໐ᵘ៤ᴀᷛޚՈᴵ᭛DŽᴀޚߎČᯊˈ᠔߾ČᴀഛDŽ᠔ޚ῁ˈՓϬᴀᷛޚՈϬϟ߫ޚ᳔ᴀՈৃDŽ*ˋ7 ü Ꮉ⌟ₓࠊϬẔ⌟Ҿᜬᰒ߾Ҿᜬஂܲᑺ൫ *ˋ7 ü Ҿ఼Ҿᜬᴀᴃˊ Ⴎ D₋ϬẔ⌟ϢࠊிඣˈᇍϣˈҹҷՈᮑDŽᇍ☿থˈᰃϣথࠊՈᘏDŽϔѯĀҾᜬϢࠊā Lˈ , DŽˊ ˊ ⛁ D₋ϬẔ⌟Ϣࠊிඣᇍ☿থՈ⛁ϣˈҹҷՈᮑDŽˊ ˊ Ϲ H D₋ϬẔ⌟Ϣࠊிඣᇍ☿থՈথˈҹҷՈᮑѠ V GD DŽˊ ˊ ẋ S D₋ϬẔ⌟ϢࠊிඣᇍϣˈҹҷՈᮑDŽ ˊ ˊ ܼ Z S Dᭈਃࡼǃ᫇ǃذᴎϢˊঞՈₑਃࡼ᪡ˊ ˊ ֕ PᢆඣঞՈẔখ᭄ঞˈҹܲখ᭄źˈẔߎϡখ᭄źDŽЏ⌟ₓிඣՈϔϾবₓᑊᇚᝯ⌟ؐϢؐՈDŽˊ ˊ ֕ VᇍϣՈ֕ࠊDŽ◄ᯊˈẜࣙՈᅝᡸ᪡DŽ ˊ ˊ ▊ඣF G P V▊ඣϵ఼ǃবễ఼ঞᩥਜ਼ᴎϢՈඈ៤ˈᰃϔⒸᭈՈ᠔Ոখ᭄▊ࠊ֜ ৄ ϞՈҾᜬ& খᢅ ˊ ˊ ˊ Ϟ߾ˈҹ֓ؐʱˊᇍϣࠊDŽˊ ˊ ிඣᎹ HிඣᎹඣՈֲՈˈ໐ᇍிඣᇍᬥᵘ៤ǃඈᵘǃǃࠊᴎᵘẟ᪂ᩥՈDŽϔՈࠊᇍᬥඣˈϬᑊՈඈ៤ՈՈ᳝ᴎᭈDŽ໐ඣᴀẜᰃՈϔϾඣՈඈ៤DŽˊ ⌟ₓϢᜬ P D G Lˊ ˊ ⌟ₓ PҹܲₓؐЎՈՈ᪡DŽˊ ˊ >⌟Ո@ₓ >@TৃᅮₓܲՈϔᬥˈЎՈˊ ˊ >ₓ@ؐ Y > D @ϬϔϾ᭄ϔϾᔧՈ⌟ₓᜬ߾Ոₓˈབ Pǃ ǃϔ DŽ ˊ ˊ বₓ Y݊ؐৃব⌟ߎՈₓźDŽˊ ˊ বₓ L Y఼ҾᜬՈবₓDŽˊ ˊ ߎবₓ R Yϵ఼ҾᜬߎՈবₓDŽˊ ˊ ᝯ⌟বₓ P G Y⌟ₓՈবₓDŽᝯ⌟বₓỞ⏽ᑺǃǃₓǃᑺDŽ ˊ ˊ ᝯ⌟ؐ P G YᢈᴵӊՈⒸˈϵ⌟ₓញՈˈᑊҹ᭄ؐ⌟ₓᜬ߾Ոₓؐˊ ˊ >఼ҾᜬՈ@߾ؐ L GL> D P L@ Ҿ఼Ҿᜬ᠔Ոᝯ⌟ₓՈؐDŽˊ ˊ >ₓؐ@ףؐ W Y> D @ᜬ߾ℷₓᯊ᠔ᴵӊϟՈₓՈؐDŽ⊼˖ₓՈףؐᰃϔϾˊˈϔޚܲՈˈỞϬףؐᴹףؐDŽˊ ˊ >ₓՈ@൪ףؐ F W Y > D @ ЎϔᅮՈৃҹҷףؐՈₓؐDŽ⊼˖ ˊϔˈףؐᝯףؐՈˈᇍѢϔᅮՈϬˈؐৃᩥDŽˊϔϾₓՈĀףؐāˈϔϬՈஂܲᑺՈҾᜬᮍDŽˊ ˊ Hᝯ⌟বₓՈᝯ⌟ؐף᭄ؐDŽ⊼˖ ˊᔧ⌟ؐףؐᯊˈ˙⌟ؐϔףؐDŽˊᔧᜬញՈ᭄ߎᯊˈᖙᜬញՈޚDŽˊ ˊ ߾ؐ H R L GL ҾᜬՈ߾ؐ⌟ₓՈ ףؐDŽ ˊ ˊ ᓩϬ GX HҾᜬՈ߾ؐҹᢈؐˈᑊҹ᭄ᜬ߾DŽˊ ˊ ᇍ HҾᜬՈ߾ؐҹᝯ⌟ₓՈ ףؐˈᑊҹ᭄ᜬ߾DŽˊ ˊ ᴀ L Hখ↨ᴵӊϟҾᜬՈ߾ؐDŽˊ ˊ ޚ ஂ ܲᑺ DҾᜬ߾ؐϢ⌟ₓ ףؐՈϔᑺDŽˊ ˊ ޚ ஂ ܲᑺ൫ D FҾᜬޚ ஂ ܲᑺՈ൫DŽˊ ˊ VᢈՈᎹᴵӊϟˈҾᜬញᢈᯊⒸݙবՈ࿁DŽ ˊ ˊ Ẕ⌟Ҿᜬ P L⌟ₓՈҾᜬDŽҹᰃবễ఼ǃӴ఼Ⴎߎӊᰒ߾ញՈҾᜬDŽˊ ˊ Ẕߎӊ VˈGH GHߎ఼ˈ᳝ᯊӊDŽָ⌟বₓˈᑊᇚḰᤶ⌟ₓՈՈӊ఼ӊDŽবₓẔߎӊߎⒸՈ݇ՈˈϡবDŽ ˊ ˊ Ӵ఼ W GXᛳ⌟ₓˈᑊϔᅮᇚ݊ḰᤶՈߎₓՈҾᜬDŽ ᳝ՈӴ఼ˈˊɴᬥՈᗻՈˈབ˖⏽ᑺӴ఼ˈǃᑺǃᑺǃᑺӴ఼ˈₑₓǃǃ఼ˈ఼DŽˊ ˊ বễ఼ WߎᷛޚՈӴ఼DŽবễ఼ৃˈབ˖⏽ᑺবễ఼ǃবễ఼ǃবễ఼ǃₓবễ఼ǃবễ఼ǃবễ఼ǃবễ఼ǃḰợবễ఼ǃϹবễ఼ǃবễ఼DŽˊ ˊ বễ఼V Wញᖂˊ఼Ոবễ఼ˈৃᇍ⌟ₓؐẟ᭄ˊ ࣙ ˈߎޚᢳˋ᭄ˈႮՈবễ఼DŽ ˊ ˊ ᩥ ᜬ P⌟ₓ߾ᝯ⌟ؐՈញDŽϔϬ᭄߾খ᭄ؐՈࢴĀᜬāDŽ ᩥ ᜬ Ϭˈབ⌕ₓᩥǃ⏽ᑺᩥǃᜬDŽ ˊ ˊ ᰒ߾ҾᜬGL Lᰒ߾ ߾ǃ ᝯ⌟ₓؐՈҾᜬDŽˊ ˊ ߾Ҿᜬ L GLˈL GL L߾ᝯ⌟ₓؐ݊݇ؐՈᰒ߾ҾᜬDŽˊ ˊ ᜬ U GHˈU GL L⌟ₓؐ݊݇ؐՈᰒ߾ҾᜬDŽˊ ˊ ᜬ L LᯊⒸˈ῁߾ϔᢈᯊⒸࠄ᭄ᯊⒸՈᝯ⌟বₓᩥؐՈᰒ߾ҾᜬDŽˊ ࠊ FᇍϣՈ᪂ ǃǃϹᴎǃϹࠊӊ ẟՈ ᓔǃ݇ǃਃǃذ DŽˊ ˊ ႮࠊD FⒸࠊӊՈࠊDŽˊ ˊ ࠊ P Fϵᴎᴎᵘ݊ࠊӊՈࠊDŽ ˊ ˊ ᓔɳࠊ R O FߎবₓϡᴀࠊϬՈࠊDŽᢳᓔɳࠊˈẜ᳝ࠊ݊DŽˊ ˊ ࠊ ࠊ F G O FࠊϬবₓՈࠊDŽˊ ˊ ᅮؐࠊ F Z G VüSࠊDŽՓবₓֱᴀՈࠊDŽˊ ˊ বᅮؐࠊF Z Y VüSՓবₓՈᅮؐব࣪ՈࠊDŽˊ ˊ ࠡࠊ G G FᇚϔϾᇍᝯবₓՈźՈḰᤶҹՈ┈ϬՈࠊDŽ ࠊϬՓবₓϢؐՈDŽℸϬৃᮑᓔɳࠊϞDŽˊ ˊ ൫ࠊ F GH FЏࠊ఼ՈߎবₓᰃϔϾࠊ఼Ոখ↨বₓՈࠊDŽ ˊ ˊ ࠊ WüS FՈব࣪ˈߎᓔ݇ϸՈࠊDŽ ˊ ˊ எࠊ FᇚՈஂܲₓḰஎₓˈஎˊˈߎஂܲₓՈࠊDŽˊ ˊ Ⴎࠊ D GD F₋ϬႮՈᮍবࠊᢈ ᪂খ᭄ˈҹࠊிඣᗻՈࠊDŽˊ ˊ ᳔ࠊ R FᢈՈᑺϟˈՓՈࠊDŽˊ ˊ Ⴎࠊ VüW FᇍẋՈᔧՈ᳔ՈᗻˈႮࠊ఼ᭈখ᭄ՈࠊDŽˊ ˊ ࠊ O FỞᓔ݇ₓᓔ݇ₓߎՈࠊDŽˊ ˊ ࠊ V FϔϔிՈࠊDŽˊ ˊ ᭄ָࠊ GL GL F ''Ϭᩥਜ਼ᴎҷࠊ఼ঞࠊញˈָᇍϣՈࠊDŽ᭄ָࠊᰃᩥਜ਼ᴎࠊՈ ϔˈϔ൫ᩥਜ਼ᴎࠊிඣՈϔ൫ˈϬᖂൟᩥਜ਼ᴎᖂˊ఼ᴹ˗ᩥ ਜ਼ᴎᩥਜ਼᪂ඣՈؐDŽˊ ˊ Ⴎࠊிඣ D F Vϵᇍᬥࠊញᵘ៤Ոˈ࿁ᇍᝯᇍᬥՈᎹࠊՈிඣDŽࠊញᝯ ᇍᬥПⒸՈϬᵘ៤ࠊிඣՈẔDŽϔϬ᭄ े᭄ൟ ˈϬᩥਜ਼ᴎ ᭄ᴎঞᢳᴎ ẟ᭄ᢳˈᇚᩥਜ਼ᴎϢᢳDŽˊ ˊ ࠊிඣ F F VₓᰃₓǃߎₓгₓՈࠊிඣDŽඣЁˈϡӊˈඈ៤ӊ Ոߎₓ῁ₓՈ᭄DŽˊ ˊ ࠊிඣ GL F Vₓᰃₓₓˈ໐ߎₓᰃₓՈࠊிඣDŽிඣЁӊˈϔ ࠊிඣ ఼ࣙ ࠊிඣ ࣙӊ DŽˊ ˊ ᴎᵘ DˈD HᇚࠊবЎՈᴎᵘDŽָˈՈࡼ Ϲ⇨ᴎᵘDŽˊ ˊ ᫇ᴎᵘ U Hϵᴎᵘব᪡বₓՈᴎᵘˈབࠊǃDŽ ˊ ˊ ࠊ F YDŽ ϵࠊᴎᵘ᫇ՈˈҹবₓՈ᫇ᴎᵘDŽˊ ᩥਜ਼ᴎிඣF Vˊ ˊ ϔ J Yˊ ˊ ˊ Ϲᩥਜ਼ᴎ H F࿁ₓẔՈϹDŽᑓϬѢᩥਜ਼ǃ᭄ˊႮࠊᮍDŽỞ఼ǃࠊ఼ǃ఼ঞߎᰒ߾᪂ඈ៤DŽˊ ˊ ˊ ᭄ᩥਜ਼ᴎ GL F₋Ϭᜬ߾᭄ˈϬਜ਼ᇍ᭄ՈϹᩥᴎDŽỞ఼ǃࠊញǃݙᄬ఼ඈ៤DŽˊ ˊ ˊ ᖂˊ఼ P₋ϬࠊՈЁˊ & ˈᖂ>ൟ@ᩥਜ਼ᴎՈӊˈᅠࠊDŽˊ ˊ ˊ ᖂ>ൟ@ᩥਜ਼ᴎ PҹՈᩥਜ਼ᴎDŽҹᖂˊ఼ЎˈҹՈ఼ǃߎ݊ᵘ៤ՈDŽˊ ˊ ˊ ᖂ>ൟ@ᩥਜ਼ᴎ V G PᴎDŽϔࠊϹᖂ>ൟ@ᩥਜ਼ᴎӊՈᩥਜ਼ᴎDŽϔ֜ˈᑊ᭄߾఼ҹᰒ߾᭄࣏DŽˊ ˊ ˊ Ꮉࠊᴎ S FՈᢳ ᭄᭄Ո࿁ˈᑊ ᭄ࠊˈҹᅲࠊ ֕Ո᭄ᩥਜ਼ᴎDŽՈ˖ǃᡫᑆᡄᔎˈ࿁ˈᯊࠊՈᡅˈ᳝Ոẋབ˖ᢳₓǃᓔ݇ₓǃ᭄ₓǃₓǃ᭄ₓߎǃᓔ݇ₓߎঞüᴎỞDŽ ˊ ˊ ˊ ӊ P GXඈញՈӊӊˈϔҹඈՈᷛޚՈӊDŽ ˊ ˊ ˊ ᭄ GD᳝˖D Ϭᜬ߾ǃˈҹႮǃḰᤶ໘ˊDŽǃՈϔႮǃ໘ˊՈՈᜬ߾DŽˊ ˊ ˊ L᭄ˊЁˈҹϔᅮՈ᭄ՈDŽˊ ˊ ˊ LϵǃՈDŽᩥਜ਼ᴎЁˈՈӊ ࣙᩥਜ਼ᴎⒸǃᩥਜ਼ᴎᩥਜ਼ᴎⒸҹঞᩥਜ਼ᴎϢඣⒸՈ ˈՈᩥਜ਼ᴎ࣏Ո఼఼ՈϔᾬDŽˊ ˊ ˊ ᘏඃᡞ ࿁ₓ ՈഄՈỞDŽӊⒸՈඃˈᰃ᭄Ոϔ᭄ՈϔՈᘏDŽ ˊ ˊ ˊ ᭄ GD Kϔᴵ᭄ඃՈঝⒸӴՈᘏDŽˊ ˊ ˊ ᭄ GD QϔϾ᭄ϔϾ᭄ⒸӴՈDŽϔϾ᭄ҹϔϾ᭄ˈՈϡՈ៤DŽ᭄᭄Ոঝݙඈ៤DŽˊ ˊ ˊ O D Q $ϔϬˈ᳝ݙϬѢ᭄ঝⒸẟ᭄Ո᭄DŽˊ ˊ ˊ ᭄ GDᩥਜ਼ᴎˊՈ༘݇Ո᭄Ո▊DŽϔϾ᭄ՈϔᾬܼˈᑊϔϾඈ៤DŽˊ ˊ ˊ ҎᴎỞ PüP FᴎᇍDŽᰃᩥਜ਼ᴎ᭄˗ᩥਜ਼ᴎỞ߾ញᇚ໘ˊࠊ߾ߎᴹDŽЎᴎỞˈᑨࠊǃՈӊDŽˊ ˊ ˊ X Wࢴᴎ P L DŽỞϬϬᴹᩥਜ਼ᴎிඣẟՈǃߎ᪂DŽབ˖ᴎǃ֜Ոᰒ߾఼ǃՈ߾఼DŽˊ ˊ ˊ LˈV₋Ϭᖂˊ఼ˈϵݙࠊՈǃ᭄ϔᅮᩥਜ਼ՈDŽ ˊ ˊ ˊ ᓔඣ R Vޚẟˈ࿁ᩥਜ਼ᴎிඣՈϔᩥਜ਼ᴎிඣDŽ ˊ ˊ ˊ ӊ Vᩥਜ਼ᴎՈிඣ࣏ǃϬ࣏ǃ᪡ඣঞ᭄ˊࠊ᳝݇ՈᴀᘏDŽˊ ˊ ˊ ӊ V V࣏ࠊẋˈࣙᩥǃẔǃϬՈᎹDŽབࠊՈ᪡ඣ᪱ˊிඣDŽˊ ˊ ˊ ᑨϬӊ D VЎϬϬՈӊˈབ᭄ˊǃࠊᑨϬӊDŽ ˊ ˊ ˊ ӊ K GZᩥਜ਼ᴎிඣЁՈᘏDŽབǃӊǃߎỞǃ఼DŽ ˊ ˊ ˊ ӊᅠՈഫ఼ӊDŽ খᢅ ˊ ˊ ˊ ᴵˊ ˊ V D G GLˊ ˊ ˊ VϔϾখ᭄ᜬ߾ՈϔϾবₓՈՈˊবₓDŽখ᭄ࢴՈĀখ᭄āDŽˊ ˊ ˊ ᭄GL Vখ᭄ᜬɴϬ᭄ᜬ߾ՈϔඈؐЁՈDŽˊ ˊ ˊ ᢳ D Vখ᭄ᜬɴݙؐՈDŽˊ ˊ ˊ GLᩥਜ਼ᴎிඣЁˈЎᇍϣՈ֕᪡ˈ߾఼ খᢅ ˊ ˊ ˊ ϞՈ ߾DŽˊ ˊ ˊ ᘏ R GLᜬ߾ᝯᇍᬥ᪂ǃখ᭄ࠊிඣՈDŽ ˊ ˊ ˊ ẋ S GLᜬ߾ϔᝯᇍᬥՈϣǃ᪂খ᭄ՈDŽˊ ˊ ˊ ࠊ F G Lᜬ߾ẋবₓՈ⌟ؐǃ᪂ؐǃؐǃߎؐᭈখ᭄ҹঞՈϔDŽˊ ˊ ˊ ᨪϿ D GLࠊߎՈẋᨪՈˈҹϡՈϡՈ߾ᨪՈϔDŽỞ ˈ᪡ҹᮍϔϾϔᨪDŽˊ ˊ ˊ ᅲᯊ UüW W G GLϔᅮՈ₋ᯊⒸ བ ˈᇚϔᯊⒸⒸ བ ݙখ᭄Ո᭄ˈ఼Ёˈ ᑊҹඃ߾ՈϔDŽˊ ˊ ˊ K W G GLϔᅮՈ₋ᯊⒸ བ P ˈᇍϡՈখ᭄ẟᯊⒸ བ G ₋఼Ёˈ◄ ᡅᯊˈৃҹ᫇ߎᯊⒸݙՈ᭄ˈҹඃ߾ՈϔDŽˊ ˊ ˊ ႮᨪϿ V GL D GLᇍẋࠊঝǃ᪡ঝǃỞẟˈᔧᯊᰒ߾݊ՈϔDŽˊ ˊ ˊ F GLҹᜬ߾ϔඈখ᭄ བᴎ⏽ᑺ ՈDŽˊ ˊ ˊ ᓔ GL Z GRᇚՈϔ߾ˈҹ֓ՈDŽ ˊ ˊ ˋߎ LˋR ,ˋˊ ˊ ˊ ᭄ₓ GL L ',ϡՈ᭄ₓˈгᓔ݇ₓ RüR L DŽˊ ˊ ˊ ᢳₓ D L $,ব࣪ՈˊₓDŽˊ ˊ ˊ ᭄ₓߎ GL R 'ϡՈ᭄ₓՈߎˈгᓔ݇ₓߎ RüR R DŽˊ ˊ ˊ ᢳₓߎ D R $ব࣪ՈˊₓՈߎDŽˊ ˊ ˊ ₓ S L ,ϡՈₓՈDŽˊ ˊ ˊ ₓߎ S RϡՈₓՈߎDŽˊ ˊ ˊ GHˈL X᭄ˊிඣЁ᭄ℸඣՈϔDŽˊ ˊ ˊ ߎ᪂ R GHˈR X᭄ˊிඣЁඣễߎ᭄ՈϔDŽˊ ˊ ˊ ߎ᪂ LüR GHˈLüR X ᭄ˊிඣЁϬᴹᇚ᭄ඣˈඣ᭄ˈՈ᪂DŽˊ ˊ ˊ ẋߎỞ S LˋR FDŽָՈߎӊՈᘏDŽӊᇚᝯখ᭄ བ⏽ᑺǃǃₓˈ ǃǃ៤ˈˈ Ոᢳₓǃ᭄ₓǃᓔ݇ₓǃₓ ˈḰᤶࠊᩥਜ਼ᴎ᠔Ո᭄ₓˈᑊࠊᩥਜ਼ᴎߎՈ᭄ₓḰ ࠊ᠔ՈˊₓDŽˊ ˊ S Hᩥਜ਼ᴎிඣЁЏ఼ߚՈ݊ՈᘏDŽˊ ˊ ˊ ᴎ Sϔߎ᪂ˈᇚᩥਜ਼ᴎߎǃՈ᪂DŽˊ ˊ ˊ K G FD ᰒ߾ញՈDŽᩥਜ਼ᴎՈߎˈָՈ᭄ӊ ਞǃᜬ DŽˊ ˊ ˊ ˋ᭄ǃ᭄ˋḰᤶ఼ $ˋ'ǃ'ˋ$ FᇚՈᢳₓ བ˖ǃϹ ḰᤶՈ᭄ₓᑊḰᤶՈ᪂DŽˊ ˊ ˊ ֜ Gϔඈ᳝Ոᵘ៤Ոញˈ᭄݊Ոˈᑊᇚ݊ЏᴎDŽˊ ˊ ˊ֜ϞՈϔࠊˈҹ᪂ǃᅠϔϾՈDŽ ˊ ˊ ˊ ᭄֜ϞՈϔDŽᔧᅗϬᯊˈৃҹᅲ᭄ǃՈᅠDŽˊ ˊ ˊ ߾఼F GH U W &ࢴ߾఼ Y GR GL Xˈ'8 DŽᩥਜ਼ᴎߎՈᰒ߾఼ˈৃҹᰒ߾ǃᜬǃ᪱ˈỞϬඃ߾DŽᰒ߾఼ϟ┈ ᪂֜ǃ఼ˈϬᰒ߾఼ᴎᇍDŽˊ ˊ ˊ O SӊՈ⌟ញDŽϬѢ⌟ᰒ߾఼Ոˊˈᩥਜ਼ᴎᑊᇍՈ ǃDŽˊ ˊ ˊ Wࠊᰒ߾఼ϞՈϔDŽỞˈࠊՈᮍDŽˊ ˊ ˊ ఼ Pᩥਜ਼ᴎՈϔ఼ˈỞϔᜬ☦DŽ ˊ ˊ ˊ Ꮉঝ H VկࠊᎹϬՈˈᇍᩥਜ਼ᴎிඣẟඈᗕǃǃׂՈঝDŽ ˊ ˊ ˊ ᪡ঝ R VկϬՈϔࠊৄDŽᰃᩥਜ਼ᴎⒸՈҎᴎˈϔϾ߾఼ˈẜ ࣙϔϾˈབ⏲֜ǃDŽ ˊ ˊ ᩥਜ਼ᴎ֕ Vˊ ˊ ˊ ᩥਜ਼ᴎ֕ඣ F P Vᇍϣখ᭄᪂⌟ˈᑊˊৢ߾ǃǃᨪՈᩥਜ਼ᴎிඣDŽϬ ѢࠊிඣՈϔᾬᯊࢴĀ᭄ඣā GDˈ'$ DŽˊ ˊ ˊ ᩥਜ਼ᴎ֕ඣ F V VᇚϣՈখ᭄ǃᝯᇍᬥ⌟໘ˊˈᑊՈࠊᢈǃࠊ Ոᩥਜ਼ᴎிඣDŽˊ ˊ ˊ ᭄ GD Dᇚᩥਜ਼ˊẋҹঞࠊЁՈ᭄ҹ₋ˈḰᤶ᭄ᔧˊՈẋDŽˊ ˊ ˊ ᭄ˊ GD Sᇍ᭄ඣՈ᪡ˈབඃǃDŽˊ ˊ ˊ ᭄ GD U GˈGD Oᇚᩥਜ਼ᴎẔ⌟໘ˊẋՈ᭄ˈϔᴎߎᴹDŽ ˊ ˊ ˊ ᭄ K GD PᇚₑՈẔখ᭄ᅮ఼Ёˈᖙᯊˈৃҹᯊ᫇ߎᰒ߾ˈᯊⒸৃҹᰃϔϾǃϔ᭄DŽˊ ˊ ˊ ᅮᯊ S GL Oᇚᩥਜ਼ᴎẔ⌟໘ˊՈ᭄ՈᯊDŽˊ ˊ ˊ S OᴎඈߎɴᯊˈᇚǃৢϔᅮᯊⒸݙᣛՈখ᭄᭄ߎᴹDŽ ˊ ˊ ˊ ᴎ U W OਃࡼՈᮍ খ᭄ᨪǃ᪂ਃذ ਃࡼᴎˈঞᯊᇚ᳝݇খ᭄᪂Ոᓔ݇ߎᴹDŽˊ ˊ ˊ ӊ V R Hথᯊˈᓔ݇ՈˈᯊⒸߎᴹDŽˊ ˊ ˊ ߚ UϬᴹҹՈᴵՈ᳔ⒸˈᇍѢϔϾ⌟ₓிඣˈҹ⌟ₓՈ᳔᭄ₓ˗ᇍѢϔϾࠊிඣˈҹࠊՈ᳔ₓ˗ᇍϹˈᓔ݇Ո᳔ᯊⒸⒸˈϔ൫˗ᇍ&ˈǃᜬՈᑺDŽˊ ˊ ˊ V Uҹ᭄ᜬ߾ՈϔிՈDŽˊ ˊ ˊ ₋ V S GࠊிඣЁⒸՈᯊⒸⒸDŽˊ ˊ ˊ &߾ & GLᇚ᭄ඣЁՈẔ⌟໘ˊ&߾ߎᴹˈབඈখ᭄ᰒ߾ǃ߾ǃ߾ǃඃ߾ǃ߾DŽˊ ˊ ˊ ᗻᩥਜ਼ S Fᇚ᭄ඣЁ⌟໘ˊՈ᭄ˈՈᇍᴎඈẔᩥਜ਼ˈབϬϹˈǃᴎᬜǃᴎඈᬜǃ(ǃ⛁DŽ ˊ ˊ ˊ ᪡ R J GDᇍᴎඈਃǃذǃˊՈϬ᭛߾ˈгᨪߎˈؐʱҹDŽˊ ˊ ߚࠊிඣ GL G F V '₋Ϭᩥਜ਼ᴎǃỞ߾ˈᅲᇍϣՈ᭄ǃࠊᡸˈϬỞ᭄Ոᩥਜ਼ᴎ֕ඣˈ݊ˈ᭄ˈৃDŽԧгҹᰃӊՈߚDŽ ˊ ˊ ˊ ẋࠊ൫ S F OߚࠊிඣᵘЁՈϔ൫ˈ൫ϵՈẋঝǃࠊঝඈ៤ˈঝ⌟Ҿᜬᴎᵘˈᅠ᭄Ո₋໘ˊˈᑊᇍᎹࠊ֕DŽˊ ˊ ˊ ֕൫ V OߚࠊிඣᵘЁ൫ՈϞϔ൫DŽϵᴎ݇ඈ៤DŽ൫ЏࠊϢࠊҹঞˊDŽˊ ˊ ˊ ˊ൫ P OߚࠊிඣᵘЁՈϔ൫ˈϵˊҎᴎඈ៤DŽ൫ҹˊϢˊˈࣙᑺǃிඣǃₓࠊǃࠊᜬǃ᭄ẟǃᦤDŽˊ ˊ ˊ ࠊঝ F Vߚࠊிඣẋࠊ൫ЁՈϔঝˈϬҹᅲᇍᎹՈ᭄ָࠊDŽ ࠊঝҹˈг᭄ඈ៤൫֕ඣDŽ ˊ ˊ ˊ ᭄ঝGD D Vߚࠊிඣẋࠊ൫ЁՈϔঝˈϬѢₓՈẔখ᭄ᅲ᭄Ո₋ˈᇚ݊ᔧՈḰᤶ໘ˊDŽ ᭄ঝҹˈгҹϢ᭄ඈ៤൫֕ඣDŽˊ ˊ ˊ ࠊঝ V F Vϵࠊ఼ S O F ߚࠊிඣࠊঝඈ៤ˈϬҹᅲՈࠊDŽࠊঝҹˈг᭄ඈ៤൫֕ඣDŽˊ ˊ ˊ ẋঝ S Vᰃࠊঝ᭄ঝՈᘏDŽˊ ˊ ˊ ഫࠊ៤Ոǃ໘ˊǃ᫇ࠊǃǃᨪՈ࣏ഫDŽˊ ˊ ˊ ඈᗕǃ FߚࠊிඣЁˈϬඣᡅᇍϡՈഫᔧඈՈẋӊඈᗕDŽ ߚࠊிඣЁˈϬඣᡅˈᇚϡՈঝǃӊˊඈӊDŽˊ ˊ ˊඣ P L V ,ᰃϔϾᩥਜ਼ᴎՈҎᴎிඣDŽˊ᠔ҹϔϾՈϣDŽϔǃࠊˊˊᵘ៤DŽඣˈϣǃᩥǃǃǃǃҎǃඣDŽிඣҹ᭄ǃᜬՈᮍˊˈҹᇍՈˊ᳔ࠊDŽ ҹॖˈϵ൫ՈϣǃᩥǃǃǃǃҎǃඣඈ៤Ոˊඣˈࢴ൫ˊඣDŽˊ ˊ ॖ൫֕ඣ S V L V Ϭᇚᴎඈᩥਜ਼ᴎ֕ඣЁՈ᳝݇ᯊ᭄ؐ ᘏ Ո᪡ঝˈЎؐ ᘏ ֕ᴎඈᅝՈᅲᯊDŽᯊгᑺᇚᴎඈՈ'DŽ ˊ ৃ U᳝˖D ᢈᴵӊϟᢈՈᯊⒸݙᜬǃࠊញᩥਜ਼ᴎிඣᅠՈ࿁DŽՈᯊⒸՈՓϬ᭄ݙˈ᪂ ఼ࣙӊ ࿁ՈDŽϵඣᩥ⌟ₓ᳝ˈ᠔ҹϔϬⒸᯊⒸᜬ߾DŽ ˊ ˊ ৃ PᴵӊᇍՓϬՈҾᜬǃࠊញᩥਜ਼ᴎிඣˈẟՈᑺˈՈ࿁DŽˊ ˊ ৃϬᯊⒸ D WϬՈᢆߎথˈᴵӊབǃ⇨ℷՈϟˈிඣញϬՈᯊⒸDŽˊ ˊ ᯊⒸ P W Ҿᜬǃࠊញᩥਜ਼ᴎிඣՈᢈݙˈᢈᴵӊϟⒸՈᯊⒸؐDŽˊ ˊ ᯊⒸ P W W UҾᜬǃࠊញᩥਜ਼ᴎிඣᢈݙˈᢈՈᴵӊϟˈẟՈᯊⒸՈؐDŽˊ ˊD ᇍϡՈҾᜬǃࠊញˈՈᎹᯊⒸᬙՈᯊⒸˈҹ P W W ᜬ߾DŽᇍৃՈҾᜬǃࠊញˈⒸՈᎹᯊⒸˈᯊᯊⒸDŽˊ ˊ ᬙிඣிඣЁՈ Ҿᜬǃࠊញᩥਜ਼ᴎிඣ ϡՈDŽˊ ˊ ৃϬ DϔϾிඣℷՈᯊⒸᩥՈᘏᯊⒸˈϬ᭄ᴹᜬ߾ˈेˋ DŽˊ ˊ GX GD GHᇍிඣЁ݇⏲Ո໘ϬźՈ᪂DŽˊ ˊ ֵ F P GH VᯊѢ ߎ ⒸՈؐՈDŽ ˊ ˊ P GH YѢ ߎ ⒸՈǃؐՈϹDŽҹᰃᴎ⌟ₓDŽˊ ˊ ᑆᡄ F P GH LϵՈߎՈব࣪DŽˊ ˊ ࠊ F P GH UҾᜬǃࠊញᩥਜ਼ᴎிඣࠊṗᇍ݊ߎՈ࿁DŽ ˊ ˊ ࠊ↨ F P GH U UҾᜬǃࠊញᩥਜ਼ᴎிඣՈˈϢߎՈՈDŽ ࠊ↨Ϭ↨ؐؐՈ Ոߚ᭄ᜬ߾DŽˊ ˊ ֵ V P GH VҾᜬǃࠊញᩥਜ਼ᴎிඣϬՈDŽˊ ˊ V P GH Yᝯ⌟ϹϬՈDŽˊ ˊ ᑆᡄ V P GH Lϵ߾ؐߎՈব࣪DŽˊ ˊ ࠊ V P GH UҾᜬǃࠊញᩥਜ਼ᴎிඣࠊṗᇍ݊ߎՈ࿁DŽ ˊ ˊ ࠊ↨ V P GH U Uߎব࣪Ոֵؐᇍѻߎব࣪ₓDŽࠊ↨Ϭ↨ؐؐՈ Ոߚ᭄ᜬ߾DŽ ☿ˊ Ⴎ D OᰃᇍϔϾࠊ᠔Ո࣏ᑺDŽ݊খ᭄Ẕ⌟ǃ᭄ˊǃႮࠊǃࠊǃᨪᡸঞඣ᪂ᩥՈᅠᑺˈ᳔ؐʱՈ᭄ₓ᠔ՈDŽ☿থՈႮᴎࠊₓঞ˗ᜬঞࠊ᪂ₓ˗ඣ᪂ᩥՈᅠᑺ˗ᮑᎹₓ˗ᡸᯬՈDŽˊ ⛁ᩥ GH R S S D ᩥᇍᬥՈᴵӊᡅˈϔᇍখ᭄Ẕ⌟ P ǃᨪ D ǃࠊ F ᢳₓࠊǃࠊᓔϔ݇ࠊ ᡸ S ݙՈႮඣDŽेᇍǃᴎඈঞிඣǃ(୍ࠊඣˈǃǃǃկǃˊǃ⊍⊍ඣᡸ᠔ՈҾᜬࠊ᪂ඣϔՈிඣ᪂ᩥᅝᩥDŽ ˊ ˊ ࠊᮍ F P GHؐʱࠊᴎඈ݊᪂ՈẔՈˈЏݙࠊ֜ ৄ Ո᠔Ո֕DŽϔࠊ▊ࠊDŽˊ ˊ ࠊ O Fࠊ֜ ৄ Џ བǃᴎ ඣ བ┨ඣǃ⛁ඣ ┈ˈⒸ བˊḪⒸǃկ⊍⋉ ݙˈؐʱࠊ֜ϞˈߚᇍᝯᇍᬥՈẔࠊDŽ ˊ ˊ ▊ࠊ F G FᇚϣՈ᪂݇ඣՈࠊ֜ ৄ ▊ࠊݙˈؐʱᇍՈᴎඈẟՈ֕ࠊDŽˊ ˊ ᴎࠊ üW F G FᇚǃᴎՈࠊ֜ ৄ ▊ࠊݙDŽЏϬѢඣЎࠊՈᴎඈDŽˊ ˊ ࠊ X F G Fᇚᴎඈ ǃᴎঞᴎ Ոࠊ֜ ৄ %֜ ▊ࠊݙˈؐʱᴎඈϔϾࠊDŽϬѢϹඣഛࠊՈᴎඈDŽˊ ˊ ḪⒸؐʱࠊ QüR F GH ϡؐʱˈඣᇍϣࠊՈḪⒸˈℸିⒸՈᡸிඣᅠˈᬙᯊৃҹႮՈ᪂DŽ ˊ ᢳₓࠊிඣ P GX F Vᅲǃᴎঞඣখ᭄ႮࠊՈᘏDŽඣЁˈᐌখ᭄Ⴎࠊঞᨪˈᇍࠡˈ݊ߎₓЎₓՈ᭄DŽᇍӊЁгࠊிඣ&GOü W V DŽ ˊ ˊ ᴎඈࠊ X F GL G FᇚüᴎඈϔϾࠊˈỞࠊಲᴎඈႮՈᎹˈǃᴎՈႮඣথߎˈҹব࣪Ո◄ˈᴎඈ᫇ǃ᫇Ո࿁DŽϬՈ൫ᰃࠊிඣᴎࠊிඣDŽˊ ˊ ˊ P GH W % ᴎࠊ ᓔɳ ˈࠊ ˈՓՈ ᴎব࣪Ո◄DŽℸҹϬˈˈгᴎՈϔDŽˊ ˊ ˊ ᴎ W P GH 7 ࠊ ᓔɳ ˈᴎႮࠊ ˈՓᴎࠡDŽℸᴎඈᴎࠡˈˈгᯊϡՈϔDŽˊ ˊ ˊ F GL G P GHǃᴎᯊࠊՈࠊிඣˈℸՈϬˊ ˊ ࠊிඣ F VᅲࠊՈᘏDŽˊ ˊ ˊ ࠊ GüZ FࠊẟₓՈႮࠊிඣDŽᇍˈࠊிඣDŽˊ ˊ ˊ ࠊ F FࠊẟₓՈࠊிඣˈेࠊՈႮࠊிඣՈˈࣙǃₓࠊDŽˊ ˊ ˊ ࠊ S Fࠊ ℷ ՈႮࠊிඣDŽˊ ˊ ˊ ễࠊ D FࠊₓՈႮࠊிඣDŽˊ ˊ ˊ ࠊ FࠊẟՈₓ (ˈ⊍ˈϬ⇨བǃǃ ՈႮࠊிඣDŽˊ ˊ ˊ ẋ⏽ࠊ V V W F ࠊ⏽ᑺՈႮࠊிඣDŽˊ ˊ ˊ ⏽ࠊ U V W Fࠊ⏽ᑺՈႮࠊிඣDŽˊ ˊ (ᴎࠊிඣ S ˈP ᅲ(ᴎࠊՈᘏDŽˊ ˊ ˊ (୍⏽ᑺࠊ S W F(ˈࠊ(ᴎߎ(୍⏽ᑺՈࠊிඣDŽˊ ˊ ˊ (ᴎҎ ࠊ P L S F ᇍ(ᴎҎ ࠊՈࠊிඣDŽ(ᴎࠊඣՈϡˈࠊবₓᝯₓᰃՈDŽˊ ˊ ˊ (ᴎࠊ O G F R PࠊẟՈ(ₓˈՓ(ᴎ᳔ϟẔՈࠊிඣDŽ ˊ ˊ ᴎࠊிඣ W F VᅲᴎࠊՈᘏDŽेᴎḰợথᴎՈؐՈႮࠊிඣDŽˊ ˊ ˊ ᴎࠊிඣ P K GU F ϵᴎˊ᪂ᩥՈӊǃӊᴎᵘᵘ៤ՈᴎࠊிඣDŽඣDŽˊ ˊ ˊ Ϲࠊிඣ HüK GU F ϵˊ᪂ᩥՈӊǃˊ᪂ᩥՈӊᴎᵘᵘ៤ՈᴎࠊிඣDŽඣDŽˊ ˊ ˊ ᭄ࠊிඣ GL üK GU ' ϵˊ᪂ᩥՈӊǃ᭄ ᩥਜ਼ᴎ ǃˊ᪂ᩥՈӊᴎᵘᵘ៤ՈᴎࠊிඣDŽ᭄DŽˊ ˊ ˊ ᢳࠊிඣ D üK GU $ ϵˊ᪂ᩥՈӊǃᢳǃˊ᪂ᩥՈӊᴎᵘᵘ៤ՈᴎࠊிඣDŽᢳDŽˊ ˊ ˊ ᴎϹࠊிඣ PüHüK GUϬᖂൟᴎ ᩥਜ਼ᴎ ঞᴎᵘᅲᴎႮࠊՈࠊிඣDŽ ⊼˖г᭄ࠊிඣˈᴎՈĀ'āˈĀˊ ˊ ˊ ᴎႮਃذிඣ D GR $7ᴎՈ⛁݊খ᭄ˈᴎࠊிඣᅠᴎՈਃࡼǃᑊذՈႮࠊிඣDŽˊ ˊ ˊ ᴎ⛁֕ඣ W V V V ₋Ϭ᭄ൟˊൟՈᮍ⌟ḰᄤՈ⛁ˈᇚᴎࠊிඣˈϬҹࠊՈՈˈֱḰᄤݙՈႮඣDŽˊ ˊ ˊ ᴎඣ H W VᴎẔˈߎɴᯊ࿁ᮑẟˊˈᑊᯊˈ࿁ᮑˈذᴎẔՈֱᡸிඣDŽ ˊ ˊ ˊ Ḱợࠊ V G FᴎࠊிඣϔˈϬѢਃࡼǃᅮḰợࠊDŽ ˊ ˊ ˊ ࠊˋ O G JᴎࠊிඣϔˈϬѢᇍᴎඈࠊDŽˊ ˊ ˊ ࠊ O G OᴎࠊிඣЁՈࠊϔˈỞࠊᴎ᫇ՈᓔᑺᴹࠊᴎඈߎDŽˊ ˊ ˊ ᡸࠊ RüV G S F ᡸࠊᰃϔࠊՈࠊDŽ᳝ϬᑺࠊᮍՈˈгϬࠊᮍՈˈབᴎḰợḰợՈ ˁᯊˈ݇⒱ˈᔧḰợᯊᓔਃ᫇ˈབℸডˈָḰợࠊಲҹḰợ˗ᯊ₋ϬDŽˊ ˊ ˊ ᡸ RüV G S WᴎֱᡸிඣϔˈᔧᴎḰợϔؐᯊႮᴎ݇ЏDŽˊ ˊ ˊ ࠊ YüS Fᴎࠊிඣϔˈָࠊ᫇ᓔᑺՈࠊᮍDŽ ˊ ˊ ˊ Q JϬবՈᮍবẟₓՈ᫇DŽ$ S DŽˊ ˊ ˊ Ā JϬবẟᓔᑺՈᮍবẟₓՈ᫇DŽ$ DŽˊ ˊ ˊ U R O Gᴎࠊிඣϔˈᇚᴎℷϟ᠔ՈˈথՈⒸݙᾬDŽˊ ˊ ˊ ᫇ YᴎࠊிඣϔˈᔧⒸᬙᴎᑺᯊˈ݇⒱ˈᑊᓊảϔڱᯊⒸৢˈᓔਃ᫇ˈҹᴎϹՈˈிඣՈˈϡிඣሥDŽ ˊ ˊ ˊ ϹḰᤶ఼HüK GU FࠊிඣЁˈᇚϹࠊḰᤶࠊՈ᪂DŽˊ ˊ ˊ ⊍,ǃߕ S WϹḰᤶ఼Ёࠊ᫇⊍ₓᮍՈDŽˊ ˊ ˊ ⊍ᴎ VỞ⊍Ϲࠊࡼ⊍ˈՓЏՈᴎᵘDŽ ˊ ˊ ˊ ˊ Y Pᅮǃ ব࣪Ոᡅˈব᫇Ոᓔਃᮍˈᴎ ܼ ᾬ ՈϟẔDŽḰᤶ $ˋ$W DŽˊ ˊ ˊ Ḱợ ᑺবࡼ GU S V G Y ᴎࠊிඣඃՈDŽỞҹᇍᑨՈḰợؐϢḰợؐՈ᭄ᴹᜬ߾DŽˊ ˊ ˊ ả GH G GඃϟᜐᯊՈϡˈࢴảDŽảҹϔϟᜐඃᇍᑨՈḰợؐϢḰợؐՈ᭄ᜬ߾DŽ ˊ ˊ ݊ˊ ˊ ˊ ࠊிඣ F V %ᴎՈႮǃ⏽ᑺႮࠊிඣՈᘏDŽ ˊ ˊ ˊ Ⴎࠊ D J F $*ࠊথᴎՈႮࠊிඣDŽˊ ˊ ˊ Ⴎᑺிඣ D GL V $'ǃᝯᴎඈᖂඃˈᅲᑺ ՈႮࠊிඣDŽˊ ˊ ˊ Ⴎඣ D V G V $ᴎࠊிඣՈϟˈᅲᴎႮՈࠊிඣDŽ ˊ ᓔ݇ₓࠊிඣ üR Vᅲǃᴎঞਃǃذᓔǃ݇ՈᘏDŽˊ ˊ ࠊிඣ V F VᇍϔᎹඣЏᴎϔᅮࠊՈࠊிඣ ᓔɳࠊࠊ DŽˊ ˊ ˊ ඈ൫ࠊ J FᡞՈՈ᪂ϔϾՈࠊˈབࠊDŽˊ ˊ ˊ ඈ൫ࠊ V FᡞϔᴎঞϔඣϔϾՈࠊˈབᴎǃᓩᴎǃՈࠊǃ఼ࠊDŽˊ ˊ ˊ Ϭ᪂ࠊ D V Gü FҹϞՈ᪂ བ ˈẔذߎᯊˈϬ᪂ਃࡼՈࠊDŽˊ ˊ ˊ ఼ࠊிඣ F V %ব࣪Ոᡅ఼ˈႮ఼ՈࠊඣDŽЁⒸࠊඣЁ៤ᇍՈ఼˗ָࠊඣЁϔৄ(ᴎঞՈਃذࠊிඣˈгϔҹՈࠊிඣDŽˊ ˊ RüWüR Fࠊᓔ݇ ᇍᑨϔৄϹᴎՈ఼ ఼ ˈᑊᇍৄ఼ ఼ ẟ ᓔǃ݇ ᪡DŽˊ ˊ ඃ V FϬᇍϹᴎՈ఼ ఼ ẟˈ໐ϬՈ᪡ᓔ݇ ᇍϹᴎ఼ ఼ ẟ ᓔǃ݇ ᪡DŽˊ ˊ ᓔ݇ₓ᪡఼ üR VϬѢᇍᴎẟਃǃذᓔǃ݇Ո᪂DŽϔᓔ݇DŽˊ ᨪ Dˊ ˊ ᨪඣD Vߎˈҹᜬࠊிඣϡிඣখ᭄ؐՈႮඣDŽˊ ˊ ؐᨪ O DẔߎবₓϟՈᨪDŽˊ ˊ ᨪGH DẔߎবₓؐՈᨪDŽˊ ˊ ఼ Dᜬ݇খ᭄ՈDŽᇍҹᜬ߾ᨪݙՈ఼ࢴDŽˊ ˊ ߎ RֱᡸࡼˈỞˊញϬ߾ߎᓩᡸࡼՈϔDŽ ˊ ˊ ᨪᡥࠊ D F RᨪՈϔˊᮍˈབ བਃࡼ ϟˈখ᭄ؐᨪؐᡅˈᬥˈЎᨪՈᮑDŽˊ ֱᡸϢ S Lˊ ˊ ඣ G ᔧᯊˈֱᡸ ݙ ໐ࠊᮑՈႮඣDŽࣙඣ V V ఼ࠊிඣ % DŽˊ ˊ ˊ ᘏ P WϵֱᡸˈՈ᠔DŽ ˊ ˊ ˊ ⊍ R W݇⒱⊍ˈՈ᠔⊍ₓDŽˊ ˊ ˊ WϵẔ ϔ(୍ ႮDŽˊ ˊ ˊ ☿ḰবЎՈ࣪ᢅ݊ˊᜬDŽˊ ˊ ˊ ☿ HᇚḰবЎᢅϡᢅՈDŽˊ ˊ ˊ VՈ᳔ব࣪ϟˈՈ☿DŽ ˊ ˊ ˈ ☿⌟఼ GHẔ⌟☿ᔎߎৃϬՈϹՈ᪂DŽˊ ˊ ˊ ܼ O R Dᜬ߾Ոϔˈᵘˈ᳝ϟ߫DŽD ᇍ˖Ϭ఼☿⌟⌟ᮍˈᔧϔ⌟఼Ẕ⌟Ո ˋ ᯊ˗Ϭܼ⌟ᮍˈᔧ ˋ ҹϞՈ☿⌟఼Ẕ⌟ϡᯊˈᅮDŽᇍ:ൟ ⚻ᓣ♝ၟ˖ᔧẔ⌟ࠄ☿Ѣϔ᭄ₓᯊ ৃ ⚻᭄ₓঞ ˈᅮ♝ၟ☿DŽF ᇍᓣ ⚻♝ၟ˖ᔧϔ߫ ⚻☿Ẕ⌟఼Ẕ⌟ࠄՈ☿Ѣϔ᭄ₓᯊˈᅮ♝ၟ☿DŽˊ ˊ ˊ ⚻☿Ẕ⌟ L G ϔ ⚻ѢẔ⌟ ⚻☿Ẕ⌟ᮍᓣDŽ ˊ ˊ ˊ ☿Ẕ⌟ H Gᓣ♝ၟˈ ⚻☿Ẕ⌟఼ˈϬ ⚻ ⚻☿Ẕ⌟ᮍᓣDŽˊ ˊ ˊ ܼ♝ၟ☿Ẕ⌟ Gϔ ⚻☿Ẕ⌟఼ˈϬẔ⌟ܼ♝ၟ ⚻☿Ẕ⌟ᮍᓣDŽˊ ˊ ˊ ☿ FẔ ⚻ ˁ ˁ ⚻☿ˈϔᅮᯊⒸ བ V ݙּᯊՈ☿DŽˊ ˊ ˊ ☿ O R O W D Fᓣ ⚻♝ၟϔˈ᳝ ⚻ˈߎ ⚻ ᭄ₓৃ Ո☿DŽˊ ˊ ˊ ᾬ☿ S O R♝ၟϔϾ☿ ⚻☿DŽˊ ˊ ˊ ♝ၟ HϬₓϟˈễ♝ၟˈҹ┨ӏ ˈᑊ˖D ᯊⒸѢ P♝♝ၟݙ DŽˊ ˊ ˊ Āₓ S UϡѢܼₓՈ ˁˈᯊѢ ˁₓDŽ ˊ ˊ ˊ V ⚻☿఼ৢˈՓ ⚻ ᭭DŽˊ ˊ ˊ ⊍ V V R YˈV W Y ᭭ˈႮ ⚻ ᭭☿ DŽˊ ˊ W V L 7 ֕ ǃǃǃᴎ᭄ ՈDŽ ˊ ˊ ˊ Ḹ D PˈW S P ֕ḸDŽˊ ˊ ˊ W V P֕DŽˊ ˊ ˊ G H P֕DŽˊ ˊ ˊ D ҹˈ⌟ₓDŽˊ ˊ ˊ Ḹ Ḹ U H P֕ḸDŽˊ ˊ ˊ Ḹ Ḹ Vˋ Y P ֕ḸḸDŽˊ ˊ ˊ ] VᰃϔϾˈϬḸDŽˊ ˊ ˊ WϔˈDŽ⌟ₓḸ᭄ˈᑊ⌟ߎখDŽˊ ˊ ˊ Ϲ H F Sϔᓣˈҹˈ࿁⌟ₓ⌟ᜬѢᅝDŽˊ ˊ ˊ W⌟ₓḸDŽˊ ˊ ˊ ᬙ D U Hü P $'ᰃϔϾ Ḹ᭄ˈỞẔˈᇍǃ໘DŽẔ⌟ঞ᭄DŽ ˊ ˊ L᳝˖D བṗǃ♝ ⚻ ˈϔ᪂ᯊˈЎৢৢՈDŽ Ўߎϡ࣏ˈ໐ˈ₋࣏ˈҹˈབʌࡴDŽˊ ˊ ᴎ FথᯊˈՓ♝ϔˈৢˈৃᓣ˖D ˁ)ˈᰃᓣDŽˁ)ˈᰃ♝ᓣDŽˊ ˊ U 5ᰃDŽ བඝǃễǃᓩ থǃᴎᯊˈDŽ ˊ ˊ L Fϔখ᭄ࠄϔ᪂ᯊˈᯊϔ᪂DŽ ˊ ǃ F UˈF֜ ৄ ˈᇍĭDŽ ˊ ˊ X F U᳝ᯊࣙ֜ Ո֜ ৄ ˈᇍDŽˊ ˊ F U֜ ৄ ˈᇍDŽབൟ☿ǃ♝ǃ┨DŽˊ ˊ Џ H Fࣙǃবǃկ Ո֜ৄˈĭDŽˊ ˊ ϹϹ F UկDŽˊ ˊ O F Uˈᅝி֜ ৄ Ոˈབ♝ǃǃǃ┨ǃǃ ┨ᇬ DŽˊ ˊ ᴎ♝ üW F U♝ˈ♝ǃ֜ ৄ ՈDŽˊ ˊ HüQ F U֜ৄǃᇍDŽˊ ˊ Ϲ H Uᅝ ࣙ ᶰDŽˊ ˊ ؐ V H UϹՈˈݙDŽˊ ֜ ৄǃᶰˊ ˊ ֜ǃሣ SݙDŽ ϬѢᅝǃDŽˊ ˊ ᶰ Fˈੵ᳝ ݙǃDŽੵDŽˊ ˊ ֜ FǃՈ֜ ሣǃᶰ DŽ ˊ ˊ ৄ FਬৄDŽৄϞ֜ DŽˊ ˊ ᴎ֜ %֜ W J S♝ǃǃথ֜ ৄ DŽˊ ˊ ֜D S┨֜ˈ݊֜DŽˊ ˊ ֜ ሣ P S֜ ሣ Ϟ߾ˈҾǃ߾֜ ሣ DŽˊ ˊ ֜ ሣ VüP S֜ ሣ Ϟ߾֜ ሣˊ ˊ ֱੵ ᶰ Zü Fੵ ᶰ ݙࡴˈ࿁ݙੵ ᶰ DŽ֜ ሣ Ϟ߾DŽᇬ⓶ੵᶰDŽࡴˊ ˊ ⛁ᶰ ੵ üG Ўᶰ ੵ ˈᶰݙֱ݊DŽᶰᓣᓣᓣϸDŽˊ ˊ ੵ ᶰǃᶊ W FˈUկੵ ᶰǃᶊ ˈݙDŽˊ ˊ ᶰ U FញࡴᶰDŽˊ ˊ ൫ G R S൫ * ü ᬜ, ᷛẔˈᇍੵ ᶰ ˈĭ ࣙᇬ ẟDŽ, Lü W S ߾DŽ ˊ V DŽˊ ˊ ☿Ϲ S S Vᇍˈ࿁ˈЎDŽ ᭄݊Ո߾ǃǃ᪡ǃႮDŽˊ ˊ ܼǃ Ϣ֜ǃৄঞ݊ϞϔDŽẔ ᭄ՈϔˈᑊᯊՈˈDŽˊ ˊ ǃ U V K U᭄Ոϔˈ֜ǃৄњDŽ ǃˈ໐DŽˊ ˊ Ởൟ J Vϔˈ֜ ৄ ǃൟњˈ ᳝DŽˊ ˊᝯǃࡼDŽ ˊ ˊ ĭ Sĭ֜ǃৄDŽ ˊ ˊ ᝯ SϵDŽǃ᭄ൟ᭄ ՈDŽˊ ˊ ৄ ৄ L V֕ˈϔৄ&֜ˈ ࡴϔϾDŽˊ ˊ V VϬDŽ˖D Ϲൟ˗ৄ˗F ˗G ᩥிᅲDŽˊ ˊ V F ՈDŽϔ˖D Ꮉ ˗ᯊ˗F ᬙ┨˗G Ẕǃൟ˗H ₑ˗ᅲᯊǃ˗J ˗K ᭄໘˗L ˗DŽˊ ˊ R VᇍՈˈϔϔৄϔϾ֜ˈ֜DŽˊ ˊ ,ˋ2 ,ˋ2 L Hᇍ֜Ϟˈϔ$ˋ'ǃ'ˋ$ǃ',ǃ'2DŽˊ ˊ Ϲൟ S P VǃᅲᯊഄǃՈˈ݊ѢൟϬDŽˊ ˊ L V VЎDŽˊ ˊ ⌟᪙ G D W V ᇍ ࣙǃᜬ֜᪂,ˋ2 ẟ⌟᪙DŽᆵ᭛௦ᓩAabsolute expansion monitor of turbine ..............................................4.6.2.4 accuracy ...........................................................................3.2.17 accuracy class......................................................................3.2.18 actuator, actuating element ........................................................3.3.20 adaptive control ...................................................................3.3.11 air flow control ...................................................................4.3.2.4 alarm ..............................................................................4.5 arm cut out ........................................................................4.5.6 alarm display.......................................................................3.4.2.8 alarm system .......................................................................4.5.1 analog electro hydraulic control (AEH) .............................................4.3.4.4 analog input ˄AI ˅..................................................................3.4.3.2 analog output (AO) .................................................................3.4.3.4 analogue signal ................................................................... 3.4.2.3 annunciator ........................................................................4.5.4 application software .............................................................. 3.4.1.22 automated diagnostics for steam turbine [rotating equipment] (ADRE) ...............4.6.2.11 automation ........................................................................ 3.1 automatic control ................................................................. 3.3.1 automatic control system ...........................................................3.3.17 automatic dispatch system (ADS) ....................................................4.3.5.3 automatic generation control (AGC) .................................................4.3.5.2 automatic level ................................................................... 4.1 automatic synchronized system (ASS) ............................................... 4.3.5.4 automatic stand-by control ........................................................ 4.4.1.3 automatic turbine startup or shutdown control system (ATC) .........................4.3.4.6 auxiliary panel ................................................................... 4.8.6 available time .....................................................................3.5.2 availablity ....................................................................... 3.5.7 axial movement .................................................................... 4.6.2.1 Bbar chart display ................................................................. 3.4.2.12 (function) block .................................................................. 3.4.6.8 boiler control system ............................................................. 4.3.2boiler follow mode (turbine base) (BF) .............................................4.3.1.1 boiler-turbine centralized control................................................. 4.2.4 boiler-turbine control room ........................................................4.7.6 boiler turbine generator panel......................................................4.8.5 burner control system (BCS).........................................................4.4.1.4 bus ............................................................................... 3.4.1.11box ............................................................................ ...4.8.2bypass control system (BPC).........................................................4.3.5.1C cabinet.............................................................................4.8.2cable room..........................................................................4.7.4 cascade control ................................................................... 3.3.8 cathode ray tube (CRT) ............................................................ 3.4.4.7 centralized control ............................................................... 4.2.3 centralized monitoring system.......................................................3.1.7 combustion control..................................................................4.3.2.2 common mode interference .......................................................... 3.5.11 common mode rejection ............................................................. 3.5.12 common mode rejection ratio ....................................................... 3.5.13 common mode signal..................................................................3.5.9 common mode voltage ................................................................3.5.10 computer monitoring system..........................................................3.4.5.1 computer systems....................................................................3.4 computer supervisory................................................................3.4.5 computersupervisory system..........................................................3.4.5.2 configuration ..................................................................... 3.4.6.9 console.............................................................................4.8.4 continuous control system ......................................................... 3.3.18 control ........................................................................... 3.3control board.......................................................................4.8.3control building....................................................................4.7control display.....................................................................3.4.2.7 control mode........................................................................4.2.1control room....................................................................... 4.7.2control station.................................................................... 3.4.6.4 control valve.......................................................................3.3.22control with fixed set-point........................................................3.3.5 control with variable set-point.....................................................3.3.6 conventional true value[of a.quantity] .............................................3.2.11 A/D, D/A onverter...................................................................3.4.4.3 closed loop control.................................................................3.3.4critical flame......................................................................4.6.1.12D data................................................................................3.4.1.8data acquisition....................................................................3.4.5.3data acquisition station............................................................3.4.6.5 data base...........................................................................3.4.1.15data highway........................................................................3.4.1.12data processing.....................................................................3.4.5.4data record, data logging...........................................................3.4.5.5 dead band...........................................................................4.3.4.24 degree of protection................................................................4.8.13 design of thermal power plant automation........................................... 4.2 detecting device....................................................................3.2.21 deviation alarm.....................................................................4.5.3 diagnostic and test software........................................................4.9.15 differential expansion monitor......................................................4.6.2.3 digital electro-hydraulic control (DEH).............................................4.3.4.3 digital computer....................................................................3.4.1.2 digital input (DI)..................................................................3.4.3.1 digital output (DO).................................................................3.4.3.3 digital signal......................................................................3.4.2.2direct digital control (DDC)........................................................3.3.16 discontinuous control system........................................................3.3.19 display.............................................................................3.4.2.4display for window..................................................................3.4.2.13 display instrument..................................................................3.2.26CRT display.........................................................................3.4.5.14 distributed control system (DCS)....................................................3.4.6 droop...............................................................................4.3.4.23Eeddy current probe..................................................................4.6.2.9 electric automation.................................................................3.1.2 electric control building ..........................................................4.7.3 electric-net control room...........................................................4.7.7 electro-hydraulic control (EHC).....................................................4.3.4.2 electro-hydraulic converter........................................................ 4.3.4.19electronics room....................................................................4.7.8 elevation flame detection...........................................................4.6.1.10 emergency trip system (ETS).........................................................4.3.4.8 engineer station....................................................................3.4.4.11 error...............................................................................3.2.12error of indication.................................................................3.2.13Ffast cut back (FCB).................................................................4.6.4fast valving........................................................................4.3.4.18 fault...............................................................................3.5.6 feedforward control.................................................................3.3.7feed-water control..................................................................4.3.2.1 fiducial error..................................................................... 3.2.14 firmware............................................................................3.4.1.24first out...........................................................................4.5.5 flame...............................................................................4.6.1.4flame envelope......................................................................4.6.1.5flame detector......................................................................4.6.1.7fossil fired power plant simulator..................................................4.9.1 fuctional fidelity..................................................................4.9.5fuel control........................................................................4.3.2.5fuel trip...........................................................................4.6.1.3full furnace flame detection........................................................4.6.1.11full scope high realism simulator...................................................4.9.2 function group control..............................................................4.4.1.1 function key........................................................................3.4.4.5furnace pressure contro.............................................................4.3.2.3 furnace purge.......................................................................4.6.1.15 furnace safetyguard supervisory system (FSSS).......................................4.6.1 fuzzy control.......................................................................3.3.10Ggeneric simulator...................................................................4.9.4H hardware............................................................................3.4.1.23hard copy...........................................................................3.4.4.2historical trend display............................................................3.4.2.10Iindication [of a measuring instrument]..............................................3.2.9 indicator ˈindicating instrument ...................................................3.2.27 individual burner flame detection...................................................4.6.1.9 information.........................................................................3.4.1.9input device ˈinput unit............................................................3.4.3.7 input/output ˄I/O ˅.................................................................3.4.3input-output device, input-output unit..............................................3.4.3.9 input variable..................................................................... 3.2.5integrating instrument .............................................................3.2.29intelligent terminal................................................................3.4.1.18interface ......................................................................... 3.4.1.10interlock ......................................................................... 4.6.3interlock control ................................................................. 4.6.6intrinsic error ................................................................... 3.2.16instructor station................................................................. 4.9.8instructor station software ........................................................4.9.14 I/O interface eguipment ............................................................4.9.12 Kkeyboard............................................................................3.4.4.4keyphasor transducer .............................................................. 4.6.2.8Llocal areanetwork (LAN)............................................................ 3.4.1.14 life................................................................................3.5.5light pen...........................................................................4.4.8limit alarm.........................................................................4.5.2load control of ball mill ......................................................... 4.3.3.3 load governing......................................................................4.3.4.10load limit .........................................................................4.3.4.11local control...................................................................... 4.2.2local control room ................................................................ 4.7.5logic control ..................................................................... 3.3.14loss of all flame ................................................................. 4.6.1.8loss of flame to a corner ..........................................................6.1.13。
锅炉汽包水位的模糊控制系统的设计

诚信申明本人申明:我所呈交的本科毕业设计(论文)是本人在导师指导下对四年专业知识而进行的研究工作及全面的总结。
尽我所知,除了文中特别加以标注和致谢中所罗列的内容以外,论文中创新处不包含其他人已经发表或撰写过的研究成果,也不包含为获得北京化工大学或其它教育机构的学位或证书而已经使用过的材料。
与我一同完成毕业设计(论文)的同学对本课题所做的任何贡献均已在文中做了明确的说明并表示了谢意。
若有不实之处,本人承担一切相关责任。
本人签名:年月日锅炉汽包水位的模糊控制系统设计摘要汽包水位是锅炉运行的重要指标。
保持水位在一定范围内是保证锅炉安全运行的首要条件。
水位的过高、过低都会给锅炉及蒸汽用户的安全操作带来不得的影响。
过高,饱和水蒸气将会带水过多,导致过热器管壁结垢并损坏,进而进入汽轮机的蒸汽带液损坏汽轮机叶片,产生安全事故;反之,水位过低,汽化过快,锅炉供水不足,致使水冷壁烧坏,甚至引起爆炸。
锅炉汽包水位的控制又比较复杂,其中存在的虚假液位、滞后性、不易检测性等等又使传统控制很难达到较为完善的控制要求。
针对锅炉汽包水位存在虚假水位、控制系统复杂、具有滞后性、难以检测等特性,及采用传统PID控制时,效果不佳,如果控制不及时,甚至会产生安全事故的情况。
同时对比模糊控制的发展现状,可发现其适应性好、鲁棒性强、控制精度高等优势,所以本文设想在传统PID控制中引入模糊控制,改善汽包水位控制系统的静态和动态特性,使汽包水位恒定在一定范围之内,杜绝安全隐患,实现锅炉汽包水位的更精确、更有效的智能控制。
关键词:锅炉汽包水位模糊控制 Matlab仿真设计 PIDThe Suzzy Control Design about Boilder Drum Water LevelSystemAbstractThe drum water level is an important index of boiler operation. Keep the water level in certain scope is to ensure the safe operation of the boiler in the workplace. The low water level higher, and will give boiler and steam the safety of users may not bring the influence of the operation. Too high, saturated steam will bring too much water, resulting in superheater tube wall scaling and damage, and then into the steam turbine with liquid damage turbine blade, produce safety accident; Conversely, low water, vaporizing too fast, boiler water supply shortage, the water wall burn out, and even cause an explosion.The boiler drum water level control and more complex, the existing false liquid level, lagging, easily tested, and so on and that traditional control of it is difficult to reach a perfect control requirements.For boiler drum water level has false water level and control system with delay and complex, difficult to testing and other characteristics, and adopts the traditional PID control, the effect not beautiful, if not in time control, even can produce safety accidents. At the same time compared to current situation of the development of the fuzzy control, find the good adaptability, and robust, control precision higher advantage, so this paper in the traditional PID control idea introducing fuzzy control, improve the drum water level control system static and dynamic characteristics of the drum water level constant in certain limits, eliminate hidden dangers, realize the boiler drum water level of more accurate, more effective intelligent control.Key words:Boiler Drum Water Level Fuzzy Control Design Matlab PID目录前言 (1)第1章锅炉相关控制与前景 (2)第1.1节概述 (2)第1.2节锅炉设备的控制任务 (2)第1.3节研究状况 (3)第2章锅炉汽包水位的控制 (5)第2.1节汽包水位的动态特性 (5)第2.2节汽包水位的几种常规控制方法 (7)第3章模糊控制原理 (12)第3.1节模糊控制的形成与提出 (12)第3.2节模糊控制的优缺点 (13)第3.3节模糊控制的基本原理 (14)第4章锅炉汽包水位的模糊控制系统设计与仿真 (23)第4.1节输入输出变量的选择 (23)第4.2节隶属函数的选择 (25)第4.3节模糊规则表的建立 (26)第4.4节合成推理算法 (29)第4.5节模糊控制表 (32)第4.6节控制参数的自整定 (34)第5章模糊PID控制的MATLAB仿真 (35)第5.1节仿真流程图 (35)第5.2节模糊控制器模块的建立 (36)第5.3节仿真模型的建立 (37)第5.4节模糊PID控制与常规PID控制仿真的比较 (39)结论 (43)参考文献 (44)致谢 (45)前言锅炉是工业过程中不可缺少的动力设备为确保安全稳定生产对锅炉的自动控制十分重要其中汽水位是一个非常重要的被控变量由于锅炉的水位调节过程难以建立数学模型具有非线性不稳定性时滞等特点传统的锅炉水位三冲量控制系统大都采用PID控制其控制效果还可以进一步提高而模糊控制不要求知道被控对象的精确数学模型只需要操作人员的经验知识及操作数据鲁棒性强非常适合用于非线性滞后系统的控制但其静态性能不能令人满意限制了它的应用为消除模糊控制的稳态误差采用Fuzzy-PID控制是常用的一种方式,所以本论题具有一定的现实意义。
基于PLC的过程控制实验装置温度模糊PID控制

基于PLC的过程控制实验装置温度模糊PID控制陶 权,谢 彤(广西工业职业技术学院,广西 南宁 530003)摘 要:本文介绍了用S7-200实现过程控制系统实验装置中锅炉夹套的温度模糊控制设计思想,对模糊PID控制的结构、模糊PID控制器的设计、模糊PID控制的PLC实现进行了分析,文中详细介绍了模糊控制器程序的编写方法,结果表明,用PLC 实现的模糊控制器简单实用。
关键词:过程控制系统实验装置;模糊PID;PLC中图分类号:TP273 文献标识码:B 文章编号:1003-7241(2010)10-0022-05T emperature Fuzzy PID Control in the Process ControlExperimental Device Based on PLCTAO Quan, XIE Tong( Guangxi V ocational & Technical Institute of Industry, Nanning 530003 China )Abstract: This article describes design concept of realizing temperature fuzzy control for boiler jackets in the process control system experimental device by using S7-200, in which the structure of fuzzy PID control, fuzzy PID controller designing and PLC implementation of fuzzy PID control are analyzed,and the fuzzy controller programming is also introduced in detail. Results show that the fuzzy controllers consist of PLC are both simple and practical.Key words: process control system experimental device; Fuzzy-PID; PLC1 引言本校自动化实验室采用的“THJ-3型高级过程控制系统实验装置”是基于工业过程的物理模拟对象系统,该系统包括流量、温度、液位、压力等热工参数,可实现系统参数辨识,单回路控制,串级控制,前馈—反馈控制,比值控制,解耦控制等多种控制形式。
模糊控制毕业论文

模糊控制考核论文姓名:郑鑫学号:1409814011 班级:149641 题目:模糊控制的理论与发展概述摘要模糊控制理论是以模糊数学为基础,用语言规则表示方法和先进的计算机技术,由模糊推理进行决策的一种高级控制策。
模糊控制作为以模糊集合论、模糊语言变量及模糊逻辑推理为基础的一种计算机数字控制,它已成为目前实现智能控制的一种重要而又有效的形式尤其是模糊控制和神经网络、遗传算法及混沌理论等新学科的融合,正在显示出其巨大的应用潜力。
实质上模糊控制是一种非线性控制,从属于智能控制的范畴。
模糊控制的一大特点是既具有系统化的理论,又有着大量实际应用背景。
本文简单介绍了模糊控制的概念及应用,详细介绍了模糊控制器的设计,其中包含模糊控制系统的原理、模糊控制器的分类及其设计元素。
关键词:模糊控制;模糊控制器;现状及展望Abstract Fuzzy control theory is based on fuzzy mathematics, using language rule representation and advanced computer technology, it is a high-level control strategy which can make decision by the fuzzy reasoning. Fuzzy control is a computer numerical contro which based fuzzy set theory, fuzzy linguistic variables and fuzzy logic, it has become the effective form of intelligent control especially in the form of fuzzy control and neural networks, genetic algorithms and chaos theory and other new integration of disciplines, which is showing its great potential. Fuzzy control is essentially a nonlinear control, and subordinates intelligent control areas. A major feature of fuzzy control is both a systematic theory and a large number of the application background.This article introduces simply the concept and application of fuzzy control and introduces detailly the design of the fuzzy controller. It contains the principles of fuzzy control system, the classification of fuzzy controller and its design elements.Key words: Fuzzy Control; Fuzzy Controller; Status and Prospects.引言传统的常规PID控制方式是根据被控制对象的数学模型建立,虽然它的控制精度可以很高,但对于多变量且具有强耦合性的时变系统表现出很大的误差。
锅炉过热蒸汽温度控制系统的设计与仿真

低(5~IO) ̄C,效率就降低约 1%,因此严格 控制过热汽温在给定值 间 r约为 20s,具有较 良好的动态特性。但实际运行 中,蒸汽负荷
附近是大型火电机组运行 的重要任务之一[1J。
是变化的,因此不宜用来控制过热汽温 。
过热蒸汽温度控制 中,被控对象具 有非 线性 、时变性 、滞后 2-2 烟气传 热量扰 动的动态 特性
monitored control system is developed by Kingview.Th e results show that t he FUZZY-PID con troller not only improves the
system of nonlinear,time variability and ce , 桫 processing capacity,but also has better se L adaptive ca pa city a nd
第 4期 2016年 4月
机 械 设 计 与 制 造
Machinery Design & Manufacture
265
锅 炉过 热 蒸 汽 温度控 制 系统 的设 计 与仿 真
刘丽桑 ,张锦 枫
(福建工程学院 福建省数字化装备重点实验室 ,福建 福州 350118)
摘 要 :过热蒸汽温度 的高低直接影响着火电机组的安全性和经济性 。由于过 热蒸汽温度对象具有非线性 、时变等复杂 特 性 ,设 计了一种采用模糊 PID控制策略 的串级控制方案 ,分析 了锅炉过热蒸汽温度在 不同扰动作 用下的动 态特 性 ,设 计 了 FUZZY—PID控制 器,对 PID控制器参数进行 了整定,并对 FUZZY-PID控制器和常规控制器的控制效果进行 了仿真 比较 ,最后利用组态王 Kingview开发 了相应的过热蒸汽温度监控 系统。结果表明 ,FUZZY—PID自适应能力强 ,提高 了系 统对非线性、时变性和不确定性等的处理能力,改善 了控 制效果 ,具有更好的动态特性。 关键词 :过热蒸汽 ;温度控制;FUZZY-PID;串级控制 ;Kingview 中图分类号 :TH16;TP368.1;TK3 文献标识码 :A 文章编 号:1001—3997(2016)04—0265—03
工控常用英文单词
工控常用英文单词集散控制系统——Distributed Control System(DCS)现场总线控制系统——Fieldbus Control System(FCS)监控及数据采集系统——Supervisory Control And Data Acqusition(SCADA)可编程序控制器——Programmable Logic Controller(PLC)可编程计算机控制器——Programmable Computer Controller(PCC)工厂自动化——Factory Automation(FA)过程自动化——Process Automation(PA)办公自动化——Office Automation(OA)管理信息系统——Management Information System(MIS)楼宇自动化系统——Building Automation System人机界面——Human Machine Interface(HMI)工控机——Industrial Personal Computer(IPC)单片机——Single Chip Microprocessor计算机数控(CNC)远程测控终端——Remote Terminal Unit(RTU)上位机——Supervisory Computer图形用户界面(GUI)人工智能——Artificial Intelligent(AI)智能终端——Intelligent Terminal模糊控制——Fuzzy Control组态——Configuration仿真——Simulation冗余——Redundant客户/服务器——Client/Server网络——Network设备网——DeviceNET基金会现场总线——foundation fieldbus(FF)现场总线——Fieldbus以太网——Ethernet变频器——Inverter脉宽调制——Pulse Width Modulation(PWM)伺服驱动器——Servo Driver软起动器——Soft Starter步进——Step-by-Step控制阀——Control Valver流量计——Flowmeter仪表——Instrument记录仪——Recorder传感器——Sensor智能传感器——Smart Sensor智能变送器——Smart Transducer虚拟仪器——Virtual Instrument主站/从站——Master Station/Slave station操作员站/工程师站/管理员站——Operator Station/Engineer Station/Manager Stationabort 中断,停止abnormal 异常abrader 研磨,磨石,研磨工具absence 失去Absence of brush 无(碳)刷Absolute ABS 绝对的Absolute atmosphere ATA 绝对大气压AC Lub oil pump 交流润滑油泵absorptance 吸收比,吸收率acceleration 加速accelerator 加速器accept 接受access 存取accomplish 完成,达到accumulator 蓄电池,累加器Accumulator battery 蓄电池组accuracy 准确,精确acid 酸性,酸的Acid washing 酸洗acknowledge 确认,响应acquisition 发现,取得action 动作Active power 有功功率actuator 执行机构address 地址adequate 适当的,充分的adjust 调整,校正Admission mode 进汽方式Aerial line 天线after 以后air 风,空气Air compressor 空压机Air duct pressure 风管压力Air ejector 抽气器Air exhaust fan 排气扇Air heater 空气加热器Air preheater 空气预热器Air receiver 空气罐Alarm 报警algorithm 算法alphanumeric 字母数字Alternating current 交流电Altitude 高度,海拔Ambient 周围的,环境的Ambient temp 环境温度ammeter 电流表,安培计Ammonia tank 氨水箱Ampere 安培amplifier 放大器Analog 模拟Analog input 模拟输入Analog-to-digital A/D 模拟转换Analysis 分析Angle 角度Angle valve 角伐Angle of lag 滞后角Angle of lead 超前角anthracite 无烟煤Anion 阴离子Anionic exchanger 阴离子交换器Anode 阳极,正极announce 通知,宣布Annual 年的,年报Annual energy output 年发电量anticipate 预期,期望Aph slow motion motor 空预器低速马达Application program 应用程序approach 近似值,接近Arc 电弧,弧光architecture 建筑物结构Area 面积,区域armature 电枢,转子衔铁Arrester 避雷器Ash 灰烬,废墟Ash handling 除灰Ash settling pond 沉渣池Ash slurry pump 灰浆泵assemble 安装,组装Assume 假定,采取,担任Asynchronous motor 异步马达atmosphere 大气,大气压Atomizing 雾化Attempt 企图Attemperater 减温器,调温器Attention 注意Attenuation 衰減,减少,降低Auto reclose 自动重合闸Auto transfer 自动转移Autoformer 自耦变压器Automatic AUTO 自动Automatic voltage regulator 自动调压器Auxiliary AUX 辅助的Auxiliary power 厂用电Available 有效的,可用的Avoid 避免,回避Avometer 万用表,安伏欧表计Axial 轴向的Axis 轴,轴线Axis disp protection 轴向位移,保护Axle 轴,车轴,心捧BBack 背后,反向的Back pressure 背压Back wash 反冲洗Back up 支持,备用Back ward 向后Baffle 隔板Bag filter 除尘布袋Balance 平衡Ball 球Ball valve 球阀Bar 巴,条杆Bar screen materialclassifier栅形滤网base 基础、根据Base load 基本负荷Base mode 基本方式Batch processing unit 批处理单元Battery 电池Bearing BRG 轴承before 在…之前bell 铃Belt 带,皮带Bend 挠度,弯曲Besel 监视孔BLAS 偏置,偏压Binary 二进制,双Black 黑色Black out 大停电,全厂停电blade 叶片Bleed 放气,放水Blocking signal 闭锁信号Blow 吹Blow down 排污Blowlamp 喷灯blue 蓝色Bms watchdogBms 看门狗,bms 监视器boiler BLR 锅炉Boiler feedwater pump BFP 锅炉给水泵Boil-off 蒸发汽化bolt 螺栓bore 孔,腔boost BST 增压,提高Boost centrifugal pump BST CEP 凝升泵Boost pump BP 升压泵Boot strap 模拟线路,辅助程序bottom 底部Bowl mill 碗式磨brash 脆性,易脆的bracket 支架,托架,括号breadth 宽度break 断开,断路breaker 断路器,隔离开关Breaker coil 跳闸线路breeze 微风,煤粉Brens-chluss 熄火,燃烧终结bridge 电桥,跨接,桥形网络brigade 班,组,队,大队broadcast 广播brownout 节约用电brush 电刷,刷子Brush rocker 电刷摇环Brown coal 褐煤Buchholtz protecter 瓦斯保护bucket 斗,吊斗Buffer tank 缓冲箱built 建立bulletin 公告,公报bump 碰,撞击bunker 煤仓burner 燃烧器Burner management system 燃烧器管理系统Bus section 母线段busbar 母线Busbar frame 母线支架buscouple 母联button 按钮Bypass/by pass BYP 旁路Bypass valve 旁路阀Ccabinet 柜cable 电缆calculator 计算器caliber 管径、尺寸、大小calorie 卡caloric 热的、热量Caloric value 发热量、热值calorific 发热的、热量的Calorific efficiency 热效率cancel 取消、省略capacitance CAPAC 电容Capacitive reactance 容抗capacity 容量、出力、能量card (电子)板、卡carrier搬运机、载波、带电粒子Carrier protection 高频保护cascade CAS 串级Case pipe 套管casine 壳、箱casual偶然的、临时、不规则的Casual inspection 不定期检查、临时检查casualty 人身事故、伤亡、故障catastrophe 灾祸、事故Catastrophe failure 重大事故Cat-pad 猫爪cathode 阴板、负极Cathode ray tube CRT 显示器Cation exchanger 阳离子交换器caution 注意Center 中心centigrade 摄氏温标Central control room 中控室Central processing unit CPU 中央处理器Centrifugal 离心的Certificate 证明书、执照Centrifugal fan 离心风机Certification of fitness 合格证书、质量证书Chamber 办公室、会议室Change 改变Channel 通道、频道Character 字符Characteristics 特性、特性曲线Charge 负荷、充电、加注Charge indicator 验电器、带电指示器Chart 图、图线图chassis 底座、机壳Chassis earth 机壳接地Check 检查Check valve CK VLV 截止线、止回线Chemical 化学Chemical dosing 化学加药Chest 室Chief 主要的、首长、首领Chief engineer 总工程师Chief operator 值班长Chimney 烟囱、烟道Chlorine 氯Circuit 电路Circuit breaker 电路断路器Circuit diagram 电路图Circular current 环流Circulating 循环Circulating water pump 循环水泵Circulating cooling water 循环冷却水Clamp 夹具、钳Clarification 澄清Class 类、等级、程度Class of insulation 绝缘等级Clean 清洁的、纯净的Cleanse 净化、洗净、消毒Clear 清除CLEARING OF FAULT 故障清除Clock interface unit CIU 时钟接口单元Clockwise 顺时针、右旋的Close 关闭Closed cooling water 闭式冷却水Closed-loop 闭环Cluster 电池组、组、群Coal 煤Coal ash 煤灰Coal breaker 碎煤机Coal consumption 耗煤量、煤耗Coal crusher 碎煤机Coal handling 输煤设备、输煤装置Coal dust 煤粉Coal-fired power plant 燃煤发电厂Coal hopper 煤斗Coal yard 煤场Coarse 粗的、不精确的Coaxial cable 同轴电缆Code 代号、密码Coil 线圈Coil pipe 蛇形管Cold 冷Cold air 冷风Cold reheater CRH 再热器冷段Cold reserve 冷备用(锅炉)Cold start 冷态启动Cold test 冷态试验Collect 收集Collecting pipe 集水管Collector 收集器Colour 颜色Colour library 颜色库Combin 合并、联合Combustion 燃烧Command 命令、指挥Commission 使投入、使投产Common 共同的、普通的Communication 联系、通讯Commutator 换向器Compensation 补偿Company CO 公司Company limited CO LTD 有限公司Complexity 复杂Complete 完成Component 元件Compress 压缩Compress air 压缩空气Compresser 压缩机Computer 计算机Concrete 混凝土制的Concurrent 同时发生的、一致的Concurrent boiler 直流锅炉Cond press 凝结器压力Condensate 冷凝、使凝结Condensate extraction pump CEP 凝结水泵Condenser COND/CNDER 凝结器Condensive reactance 容抗Condition 条件、状况Conduct 传导Conductivity 导电率Conference 会议、商讨、谈判Congealer 冷却器、冷冻器Configure 组态Connection 联接Connector 联接器、接线盒Console 控制台Consult 商量、咨询、参考Consumption 消费、消耗Consumption steam 汽耗Constant 恒定的Contact 触点Contactor 接触器、触头Contact to earth 接地、触地、碰地Content 目录Contin blwdwn 连排Continuous 连续的Contract 合同Control CNTR/CNTPL 控制Control & instrument 仪控Control loop 控制环Control oil 控制油Control panel 控制盘Controller 控制器Control stage 调节级、控制级Control valve 调节阀Conve cton sh 低温过热器Convection 对流Convertor 运输机、传输机Cool 冷的Cooler 冷却器Cooling 冷却Cooling fan 冷却风机Cooling water pump 冷却水泵Cooling tower 冷却塔Coordinate COORD 协调Coordinate boiler followmode协调的锅炉跟随方式Coordinate control system 协调控制系统Coordinate turbine followmode协调的汽机跟随方式Copy 拷贝Core 铁心、核心、磁心Core loss 铁(芯损)耗Corner 角落Correction 修正、改正Corrosion 腐蚀Cost 价格、成本、费用Cost of fuel 燃料费用Cost of upkeep 日常费用、维护费用Coupler 联轴器Coupling 耦合、联轴Couple CPL 联轴器Crane 起重机Critical 临界的Critical speed 临界速度Crusher 碎渣机Current transformer CT 电流互感器Cube 立方(体)Cubicle illumination 箱内照明Curdle 凝固Current 电流、当前Cursor 光标Curve 曲线Custom 习惯、海关Custom keys 用户键Cutter 切削工具Cyanic 青色、深蓝色Cycle 循环、周期、周波Cymometer 频率表Cyclome classifier 旋风分离器Cylinder CYL 汽缸DDaily load curve 日负荷曲线Daily load 日负荷Damage 损坏、破坏Damper DMPR 阻尼器、挡板Danger 危险、危险物Dank 潮湿Danger zone 危险区Data 数据Data base 数据库Data acquisition system DAS 数据采集系统Data highway 数据高速公路Date 日期Data pool 数据库Dc lub oil pump 直流润滑油泵Dead band 死区DeaeratorDEA/DEAE/DEAER除氧器Decimeter 分米Decrease DEC 减少Deep 深度、深的、深Default 默认、缺席Degree 度、等级Demand 要求、查问Delay 延迟Delay time 延时Delete 删除Demineralized water 除盐水Demineralizer 除盐装置Deposit 沉积结垢Desalt 除盐设备Description 说明、描述Destination 目标、目的地Desuperheater 减温器Desuperheater water DSH WTE 减温水Detail 细节Detect 发现、检定Deviate 偏离、偏差Device 设备、仪器Diagnosis 诊断Diagram 图形、图表Diagram directory 图目录Diagram number 图形号Diameter 直径Diaphragm 膜片、隔板Dielectric 介质、绝缘的Diesel generator 柴油发电机Difference 差异、差别、差额Differential protection 差动保护Diff press 差压Diff expansion DIFF EXP 胀差Differential pressure DP/DSP 差压Digital 数字的Digital electric hydraulic 电调Digital input/output 数字量输入/输出Digital-to-analog D/A 数/模转换Dioxde 二氧化碳Direct current DC 直流(电)Direct digital control DDC 直接数字控制Disassembly 拆卸Disaster 事故、故障Disc 叶轮Disaster shutdown 事故停机Discharge 排除、放电、卸载Discharge current 放电电流、泄漏电流Disconnector 隔离器、隔离开关Disconnect switch 隔离开关Discrete input/output 离散输入/输出Disk 磁盘Disk manage commands 磁盘管理命令Dispatch 调度、发送派遣Dispatcher 调度员Dispatching station 调度站(局)Disconnector 隔离器、隔离开关Discrete input/output 离散输入/输出Disk 磁盘Displacement 位移Displacement pump 活塞泵Display 显示、列屏Distance 距离Distilled water DISTL WTR 蒸馏水Distributed分布\分配\配电(水、汽)Distributed control system DCS 集散控制系统Distributed processing unit DPU 分布处理单元Distributing board 配电盘Distribution network 配电网络Distribution substation 二次变电站Disturbance 扰动Diverter vlv 切换线Divided by 除以Design 设计、发明Division 分界、部门Division wall 分割屏Documentation 文件Door 门Dosing pump 加药泵Dowel pin 定位销Down pipe 下降管Download 下载Downtime 停机时间Dozer 推土机Draft 通风、草图Drain DRN 疏水、排放Drain pump 疏水泵Drain tank 疏水箱Drawing 图样、牵引Drill 钻孔、钻头、钻床Drive 驱动、强迫Drn collector 疏水收集器Drop 站Drowned pump 潜水泵Drum 汽包Drum-type boiled 汽包式锅炉Dry 干、干燥Dual 双重的Duct 风道、管道Dust 灰尘Dust helmet 防尘罩Dust catcher 除尘器、吸尘器Duty 责任Dynamic 动态的Dynamometer 功率表EEarth 大地Earth fault 接地故障Earth connector 接地线、接地Earth lead 接地线、接地Eccentricity 偏心、扰度Econ recirc vlv 省煤器再循环线Economizer ECON 省煤器Edit 编辑Efficiency 效率Eject pump 射水泵Ejection 射出Ejector 抽气器Electric 电的Elbow 弯管、弯头Electric-hydraulic control 电/液控制Electrical 电的、电气的Electrical lockout solenoid 电磁阀锁阀vlvElectrical machine 电机Electrical service 供电Electric power industry 电力工业Electrode 电极Electric power company 电力公司Electric power system 电力系统Electronic 电子的、电子学的Electrotechnics 电工学、电工技术Electrostaic precipitator 静电除尘器Electrostatic 静电的Element 元件、零件、单元Elevation ELEV 标高Elevator 升降机Ellipse 椭圆Emergency decree 安规Emerg lub oil 事故润滑油Emerg off 事故停/关闭Emerg seal oil 事故密封油Emergency EMERG 紧急事故Emergency drain 事故疏水Emergency governet/intercepter危急遮断器Employee 雇员Empty 排空Enclosure 外壳、包围End 末端、终结End cover 端盖Energize 激励、加电Energy 能、能量Energy meter 电度表Energy source 能源Engineer keyboard 工程师键盘Engineer station 工程师站Engineer's console 工程师操作站Engineering 工程Enter 开始、使进入Entry 输入Equalizer valve 平衡线Equipment 设备Erase 删除Error 错误Escape valve 安全线Evaporate 蒸发、冷化Evaporating 蒸发量Event 事件Excess 超过、过度Excess combustion air 过剩燃烧空气Excitation 励磁Exciter 励磁机Exhaust EXH 排汽Exhaust portion 排汽段Exit 出口Expansion EXP 膨胀Expansion tank 扩容箱Expenditure 费用Expert 专家、能手Explosion 爆炸Exponent 指数幂External 外部的、表面的Extinguisher 灭火器Extinguishing medium灭弧介质Extraction check valve EXTR CHK 抽汽逆止阀VLVExtra-high voltage超高压Extend扩展、延伸Exteral外部的、表面的Extr press抽汽压力Extr temp抽汽温度Extraction EXTR抽汽FFactor因素、因数Fahrenheit华式温标Failure FAIL失败FALSE假的、错误的Fan风扇、风机Fan duty风机负荷Fast cut back FCB快速切回Fault故障Faulty operation误操作Features特点Feed馈、供给Feedback反馈Feed forward前馈Feed water给水Feed-water makeup补给水Fiber optic光纤Field磁场、现场Field operator现场运行人员Figure数字、图案File文件Filter 滤网、过滤器Filter differentialpressureFILTR DP 滤网压差Final 最后的Final super-heater FSH 末级过热器、高过Fine ash silo 细灰库Fire 燃烧、火焰Fire-proof 耐火的、防火的Fire-extinguisher 灭火器Fire-hose 消防水带Fire hydrant 消防栓Fire-fight 灭火Fireproof 防火的、阻燃的Fire pump 消防水泵First stage 第一级、首级First stage guide vane 第一级导叶Flame 火焰Flame check 火检Flame detect cable FLM DET CAB 火检电缆Flange 法兰Flange joint 法兰结合面Flank 侧翼、侧面Flash 闪光、闪烁、闪蒸Flash lamp 闪光灯Flash light 闪光Flasher 闪光装置Flexible 灵活的、柔性的Flexible joint 弹性联接器Flip-flop 触发器、双稳态电路Float-charge 浮充电Floppy disk 软磁盘Floppy driver 磁盘机Flow 流量、流动Flowmeter 流量计Flue 烟道Format 形式、格式Flue gas 烟气Fluid 液体Fly ash 飞灰Follow 跟随Forbid 禁止Force 强制Force circulation 强制循环Force draft fan 送风机Forney 福尼(公司)Forward 向前Free end 自由端Frequency 频率From 从、来自Front 前面的Fuel 燃料Fuel safety 燃料保护Full speed 额定频率Fully 充分的、完全的Function 功能Function group 功能组Furnace 炉膛Fuse 保险丝、熔断器Fuse holder 保险盒Fusible cutout 熔断开关Fw bypass 给水旁路GGAIN 增益Gang 班、组Gas 气体、烟气Gate 闸门Gate damper 闸门式挡板Gateway 入口、途径Gauge 仪表、标准Gauge float 水位、指示、浮标Gear 齿轮Gear pump 齿轮泵Gear shift housing 变速箱Gen main breaker 发电机出口总开关General control panel 总控制屏General vlv 总阀Generate 引起、产生Generator 发电机、发生器Gland 密封套Gland heater GLAND HTR 轴封加热器Gland seal 轴封Glass-paper 砂纸Goal 目的、目标Go on 继续Govern vlv GV 调速器、调节器Graphics 调节阀Grease 图形Green 绿色Grid 高压输电网、铅板Grid system 电网系统Gross rating 总出力、总额定值Ground/earth 地、大地Group 组、群Group library 组库HHalt instruction 停机指令Hangers 悬吊管Hardware 硬件Hardness 硬度、困难的Hazardous 危险的、冒险的Header 联箱Heat 热、加热Heater 加热器Heating 加热Heat rate 热效率Heat soak 暖机Hertz HZ 赫兹Hesitate HESI 暂停、犹豫High 高的、高等的、高大的High pressure HP 高压High pressure heater HPH 高压加热器History 历史Historical date reporter HDR 历史数据报告Historical storage &retrieval unitHSR历史数据报告存储与检索单元Hold 保持Home 家、处所Hopper 漏斗、料斗Hori vib(vibration) 水平振动Horizontal 水平的、横式Horse power 马力Hose 软管、水龙带Hot 热的Hot air 热风Hot rh 再热(器)热段Hot start 热态启动Hot well 热水井Hour 小时Hp cyl cross pipe 高压缸短管Hp turb exh press 高压缸排汽压力Hybrid 混合物Hydraulic 液压Hydrogen 氢(H)Hydrogen purity 氢气纯度Hydrobin/ dewatering bin 脱水仓IIdiostaic 同电位的Idle 空载的、无效的Ignition light oil 轻油点火Ignition 引燃、电火Ignitor 电火器Ignore 忽视Illustrate 说明Impeller 推进器、叶轮Impedance 阻抗Import 进口、引入Impulse 脉冲、冲击、冲量Inch IN 英寸Inching 缓动、点动Income 进线Increase INC 增加Index 索引、指示Indicator 指示器Individual 单个的、独立的Inductive reactance 感抗Input/output I/O 输入/输出Induced draft fan IDF 引风机Inductance 电感Induction motor 异步电动机Industrial water 工业水Industry 工业Inflatable seal 充气密封Inhibit 禁止Initial 最初的Inlet 入口Input group 输入组Insert 插入Inside 内侧、内部Inspection 观察、检查Install 安装Inspection hole 检查孔、人孔Installed capacity 装机容量Instantaneous 即时的、瞬时的Instantaneous power 瞬时功率Instruction 说明书、指南、指导Instrument 仪器Instrument panel 仪表盘Insulate 绝缘、绝热、隔离Insulator 绝缘子Intake 输入端、进线Integer 整数Integral 积分Intensity 强度Interpole 换向板Inter-stage extraction 中间抽头Interface 接口Interference 干扰、干涉Interlock 联锁Intermediate 中间的Internal 内部的Interrogation 质问、问号Interrupt 中断Interval 间隔Interlock auto on 联锁投自动Inverter 逆变器、反向器、非门Invoice INV 发票、发货单、托运Intermediate pressure IP 中压Intermediate relay 中间继电器Invalid 无效的、有病的Investment 投资Ion-exchange 离子交换器IP.cyl 中压缸Isolation 隔离Isolator 隔离、刀闸JJacking oil 顶轴油Jacking pump 顶轴泵Job 工作Jumper 跳线、跨接Junction box 接线盒KKey 键销、钥匙、键槽Keyboard 键盘Key library 键库Key switch 键开关Kilovolt-ampere KVA 千伏安Kink 弯曲、缠绕Knack 技巧、窍门、诀窍Knife-switch 闸刀开关LLabel 标号、标签Laboratory 实验室Labyrinth seal 迷宫密封Ladder 梯子、阶梯Ladder diagram 梯形图Lamp 灯、光源Large platen LARGE PLT 大屏Last 最后的Latch 止动销、挂闸、插锁Leak 泄漏(动词)Leakage 泄漏(名词)Left 左Length 长度Level 液位、水平Lifebelt 安全带、保险带Lift 提、升Light 光亮、点、点燃、照亮Lightning 雷电Light run 空转Lightning arrestor 避雷器Limit LMT 极限、限制Limiter 限制器、限位开关Line 线、直线Line impedance 线路阻抗Lining 衬层、内衬Linkage 连杆List 列表Liter 公升Ljungstrom trisector airpreheaters容克式空预器Load 负荷Load demand compute LDC 负荷指令计算Load impedance 负荷阻抗Load limit 负荷限制Load rejection 甩负荷Load shedding 甩负荷Loading 加负荷Load thrown on 带负荷Local 局部Local attendant 现场值班员Local repair 现场检修Local start 就地启动Local stop 就地停止Location 处所、位置Lock 闭锁、密封舱、固定Logger 记录器、拖车Logic 逻辑Long 长Loop 环、回路Loss 损失、减少Loss of excitation 励磁损失Loss of phase 失相Low 低Low press LP 低压Low press heater LPH 低压加热器Low-half 下半Lower 较低的、降低Lower heating value 低位发热量Low pressure cylinder LPC/LP CYL 低压缸Low temperature superheater LT SH 低温过热器Lub oil 润滑油Lub oil pump 润滑油泵Lubricate LUB 润滑MMagenta 品红色Magnet 磁Main主要的/主蒸汽的/电力网Main oil tank 主油箱Main screen 主屏Main steam 主蒸汽Main transformer 主变压器Maintenance 维护、检修、小修Maintenance manual 检修手册Major overhaul 大修Make up 补充(补给)Makers works 制造厂Malfunction 出错、误动、失灵Management 管理、控制、处理Manhole 人孔、检查孔、出入孔Manifold各式各样的联箱、集气管Manometer 压力表Man-machine interaction 人机对话Manual 手动、手册Manual reject MRE 手动切换Manual/Auto station M/A STATION 手动/自动切换站Mark型号、刻度、标志、特征Mass memory 大容量存储器Master 主要、控制者Master control room 主控室、中央控制室Master fuel trip MFT 主燃料跳闸Maximum 最高的、最大Maximum continue rate MCR 最大连续率Mechanocaloric 热机的Mean 平均值、中间的Mean water level 平均水位Measure 量度、测量Mechanical 机械的、力学的Mechanical trip vlv 机械跳闸阀Mechanism 机械、力学、方法Medial 中间的、平均的Mediate 间接的、调解Medium 装置、介质、工质Megawatt 兆瓦Memory 存储Metal 金属Meter 集量器、仪表、米Meter switch 仪表开关Method 方法、规律、程序Method of operation 运行方式Mica 云母Mica dielectric 云母电介质Microcallipers 千分尺Microphone 麦克风、话筒Middle MID 中间的Middle-temperature rh MT RH 中温再热器Mill 磨、磨煤机、铣刀Minimum 最小的Minor overhaul 小修Minus 减、负号Minus phase 负相位Minute 分钟Miss operation 误动作、误操作Miss trip 拒跳闸Mistake 错误、事故Mixed bed 混床Mixture 混合物Man-machine interface MMI 人机接口Modem 调制解调器Modify 修改Modulating control 调节控制Modulating valve 调节阀Module 模件Moisture 湿度、湿汽Monitor 监视器、监视Monoxide 一氧化物Month 目Motor MTR 马达Motor control center MCC 马达控制中心Motor winding 电动机组绕组Mouldproof 防霉的Mount 安装、固定Mountain cork 石棉Mouse 鼠标Move 移动Multidrop 多站Multispeed 多速Mult-multi 多、多倍Multimeter 万用表Multiplication 乘Multivibrator 多谐振荡器NName 名、名字Natural 自然的Naught line 零线Needlepoint vlv 针阀Negative 负的Negative pressure NEG PRESS 负压Neon tester 试电表Net ratine/net output 净出力Network 网络Neutral line 中性线Neutral 中性的Neutral point 中性点Next 其次的Night shift 夜班Nipper 钳子、镊子Noise 噪音No-loading 空载Nominal 标称的、额定的Nominal power 额定功率Nominal rating 标称出力、额定出力Non-return vlv 逆止线Non-work 非工作的Normal 正常的、常规的Normal closed contact 常闭触点Normal makeup wtr 正常补水Not available 无效、不能用No touch relay 无触点继电器Non-work pad / n-work pad 非工作瓦Nozzle 喷嘴Number 数字、号码、数目Number of turns 匝数Nut 螺母、螺帽OOccur 发生Odd 奇数Office 办公室Oil 油Oil breaker 油开关Oiler 注油器Oil fuel trip OFT 油燃料跳闸Oil gun 油枪Oil immersed natural 油浸自然冷却coolingOil purifier 油净化装置On-line 在线、联机的On-load test 带负荷试验On/off 开/关Onset 开始、发作Open 开、打开Open-air 露天的、开启的Open-loop 开环Open work 户外作业Operating panel 操作盘Operation 操作、运行Operational log 运行记录Operator 操作员Operator keyboard 操作员键盘Operator station 操作员站Operator's alarm console 操作员报警台Optimal 最优的、最佳的Optimal value 最佳值Optional 可选的Option switch 选择开关Orifice plate 孔板Original 初始的、原始的Oscillator 振荡器Oscilloscope 示波器Out 出、出口Outage 停用Out-of-service 为投入运行的Outlet 出口Output 产量、产品、输出Output group 输出组Outside 外边、外面Over current 过流Over load 过负荷Overload protection 过载保护Overall design 总体设计Over voltage 过压Overflow 溢流Overflow vlv station 溢流阀门站Overhaul 大修Overhaul life 大修间隙Overhead 顶部Overhead line 架空线Override 超越Overspeed 超速Overspeed trip 超速跳闸Overview 概述、总述Own demand 厂用电量Oxide film 氧化膜、氧化层Oxygen 氧PPackage 组件、包Packed group 组合组Pad 瓦、衬垫Page 页Panel 屏、盘Parameter 参数Part 部分、部件Part per million PPM 百万分率Password 口令Path 路线Peak 峰值Peak load 峰值负荷Pendant 悬吊Pendant pull switch 拉线开关Penthouse 顶棚Penumatics 汽动装置Percent PCT 百分数Percentage 百分比Perfect 完全的、理想的Perfect combustion 完全燃烧Performance 完成、执行、性能Performance calculation 性能计算Performance curve 性能曲线Periodic 周期的、循环的Periodic inspection 定期检查Peripheral 周围的Peripheral equipment 外围设备Permanent 永久的、持久的Permanent magneticgenerator永磁发电机Permit 允许Permit to work 允许开工Petrol 汽油Phase PH 阶段、状态、方面、相Phase angle 相角Phase-failure protection 断相保护Phase not together 缺相、失相Phase sequence 相序Phase-in 同步Piezometer 压力计Pitch coal 烟煤Pid drawing 流程图Pilot 导向、辅助的、控制的Pilot bearing 导向轴承Pipe 管、管道Pitch 投、掷、节距、螺距Plan 计划Plant 工场、车间Plant load factor 电厂负荷因数Plastics 塑料Platen 台板、屏式Platen superheater PLT SH 屏式过热器Plug 塞子、栓、插头Plug socket 插座Plunger 柱塞、滑阀Plunger pump 柱塞泵Plus 加Plyers 钳子、老虎钳Pneumatic 气动的Point 点Point database 测点数据库Point directory 测点目录Point name 测点名Point record 测点记录Point field 泡克区Phase voltage 相电压Pole 机、柱Policher 除盐装置Pollution 污染Pop valve 安全阀、突开阀Portion 一部分Position POS 位置Positive 确定的、正的、阳性的Potable water 饮用水Potential transformer PT 电压互感器Pound LB 磅Power PWR 功率、电源Power factor 功率因子Power plant 电厂Pre-alarm 预报警PrecipitatorPRECI/PRECIP除尘器Preheat 预热Pre light 预点火Preliminary 准备工作Present 出现Preset 预设、预置Pressure PRES 压力Primary 初级的、一次的Primary air 一次风Primary air fan PAF 一次风机Primary superheater 低温过热器Primary grid substation 主网变电站Prime 首要的Printer 打印机Principle 原理、原则Priority 优先级、优点Probe 探头Process 过程、方法Processing time 处理时间Program 程序Programmable 可编程的Programmable logicalcontrollerPLC 可编程逻辑控制器Prohibit 禁止Proportional / integral /derivativePID 比例/积分/微分Protection PROT 保护Protection bolt 危急遮断器飞锤Protection ring 危急遮断器飞环Protocol 规约(数据通信)Potential transformer PT 电压互感器Psig磅/平方英寸(表压力)Psia磅/平方英寸(绝对压力)Puffer breaker 压力式断路器Pulse 脉冲、脉动Pulverizer PULV 磨煤机Pump 泵Punch 冲床、冲压机Purge 净化、吹扫Purifier 净化器Purify 纯度Purpose 目的、用途Push and pull switch 推拉开关Push button 按钮Put into operation 投入运行Pyod 热电偶Pyrology 热工学QQ-line Q 线Quad 回芯组线Quality 质量Quartz 石英、水晶Query 询问、查询Quick 快Quicksilver 水银、汞Quick open 快开Quit 停止、离开、推出RRack earth 机壳接地Radial 径向的、半径的Radication 开方Radiator wall rh 壁式再热器Radiator 散热(辐射)器Radiation fin 散热片Raise 升高Range 范围、量程Rap 敲打Rap device (除尘器)振打装置Rapid charge 快速充电Rated 额定的、比率的Rated conditions 额定条件Rated power 额定功率Ratio 比率Raw material 原材料Ray 光线、射线Reactance 电抗、反作用Reactive capacity 无功容量Reactive power 无功功率Read out 读出、结果传达Ready 准备好Real power 有效功率Real time 实时的Rear 后面Recall 重新调用、重查Receive tank 回收箱、接收箱Recipe 处方、配方Recire/Recycle damper 再循环挡板Recirculate 再循环Reclaim 再生回收Reclosing 重合闸Recommend 介绍、建议Recording 记录、录音、唱片Recovery 恢复、再生Recovery time 恢复时间Rectification 整流、检波、调整Rectifier 整流器Red 红色Reduction 还原、缩小、降低Redundancy 冗余、多余Reference REF 参考、参照、证明书Reflux 倒流、回流Region 地域、领域Register 寄存器Regulate 调节、控制Regulating stage 调节级Regulating valve 调节阀Reheater RH 再热器Relative REL 相对的Relative expansion 相对膨胀Relay 继电器Relay panel 继电器屏Release 释放Reliability 可靠的、安全的Relief去载、卸载、释放、解除Relieve valve 安全阀、减压阀Remote 遥远的、远方的Remote select 遥控选择Remote technical center RTC 遥控技术中心Renewal 更新、更换Repair 修理Repairer 修理工、检修工Repeat 重复、反复Replacement parts 备件、替换零件Request REO 请求Require 要求Reserve parts 备件Reserved 备用的Reset 复位Resistance 阻力、电阻Resonate 谐振、调谐Response 响应Responsibility 责任Retract 可伸缩的、缩回Retractable thermoprobe 可伸缩的温度探头Retrieval 可检索的、可追忆的Return 返回Return oil 回油Reverse power 逆功率Reverse rotation 反转Review 检查Rig 安装、装配、调整Right 右Right-of-way 公用线路Ring 环Roller 辊子Roof 顶、炉顶Root 跟Rotary switch 转换开关Rotating 旋转Rotating joint 液压联轴器Rotor 转子Routine 例行的、日常的Routing inspection 日常检查、日常检测Routing maintenance 日常维护Run 运行Run back 返回Rundown 迫降Running conditions 运行情况Running current 工作电流Running in 试运行、试转Running/operation overhaul 临时检修SSafe安全的、可靠的、稳定的Safe potential 安全电压Safety 安全Safety cap 安全帽Safety measure 安全措施Safety rules 安全规程Safety valve 安全线Sample 取样、举例Sampler 取样器Saturate 饱和Saturate condition 饱和条件、饱和状态Saturated steam SAT STM 饱和蒸汽Scale 铁锈水垢Scan 扫描Schedule 时间表、计划表Schematic 图解的、简图Scoop 勺管Scr controller 屏幕控制器Screen 屏幕Screw 螺杆、螺丝Screwdriver 螺丝刀Scroll 滚屏Sea 海Seal 密封Seal air 密封风Sealing gland 密封盖Seal oil 密封油Seal steam SEAL STM 密封蒸汽Search 寻找、查找Seawater 海水Second 秒、第二Second air SEC AIR 二次风Secondary 二次的Seep 渗出、渗漏Seepage 渗漏现象Select 选择Self 自己、自我、本人Self-hold 自保持Self-running 自启动Sensor 传感器Sensitive 灵敏器Sensitiveness 灵敏性Separator 分离器Sequence 顺序、序列Sequence of emergence SOE 事故追忆Sequential control system SCS 顺序控制系统Series-longitudinal layout 串联纵向布置Service 服务、伺服Service power 厂用电Servomotor 伺服电机Set 设定Setpoint 设定点Set up 安装、调整、建立Severity 刚度、硬度、严重Sewage treatment 废水处理Shadow 影子、屏蔽Shaft 轴、烟囱Shaft seal 轴封Shake 摇动、振动Shakeproof 防振Shaft 轴、手柄、矿井Shaped 形状Share 共享、分配Share memory 共享存储器Sheet 表格、纸张Shell 壳Shield 屏蔽层Shift 值、替换Shift charge engineer 值班工程师Shoe 推力瓦Shortage of water 缺水Short circuit 短路Shot 发射、冲击、钢粒Shunt reactor 并联电抗器Shut off 关闭Shutdown 停止、停机Siccative 干燥剂Side 侧边Sidewall 侧墙Sifter 筛子、滤波器Signal 信号Signal lamp 信号等Sign 标记、注册Significance 意义、有效Silence 消音、沉寂Silicon SI 硅Silicon stack 硅堆Silo 灰库Single 单个的、个体的Station interface module SLM 站接口模件Simple 单纯的、简单的Similar 同样的、类似的Simulator 仿真机Single blade switch 单刀开关Sinusoid 正弦曲线Site 现场Site commissioning test 现场投运方式Size 尺寸、大小Size of memory 存储量Sketch 图纸、草图Skin effect 集肤效应Skip 空指令、跳跃Slag 结垢Sliding key 滑销Sliding press mode 消压方式Sluiceway 水沟Slurry 灰浆Smoke 烟、冒烟Smokes-stack 烟囱Smooth 平滑的、光滑的Socket 插座Soft 软的、柔软的Software 软件Solenoid SOLN 螺线圈Solid 固体Sootblower 吹灰、吹灰器Sound detection 声音探测Source 源、电源Spanner 扳手Spare 备用的、空余的Spare parts 备件、备品Specification 技术说明Specific weight 比重Speed 速度Speed protection 超速保护Spray 喷射。
汽车配件说明书

Indicators................................ 131 Shift Lever Positions ................. 131 Shift Lock Release..................... 134
基于Matlab/Simulink的锅炉汽包水位控制建模仿真

基于Matlab/Simulink的锅炉汽包水位控制建模仿真金璐;陈勇【摘要】A new type of boiler dnnn water level fuzzy PID controller is designed in this paper, which analysed the mathematical model of the boiler drum water level control system, the constructure of the fuzzy PID controller and working principle and effect. The water level controlling of fuzzy PID controller and the common controller is simulated respectivelyby applying Matlab/simulink. The result shows that the fuzzy PID controller design is reason- able and controllable.%设计了一种新型的锅炉汽包水位模糊PID控制器,分析了锅炉汽包水位控制系统的数学模型和模糊PID控制器的结构、工作原理和作用,并运用Matlab/Simulink对模糊PID控制器和常规控制器分别在锅炉汽包水位控制中进行仿真.结果表明,模糊PID控制器设计合理,控制效果良好,具有更好的控制特性.【期刊名称】《淮阴师范学院学报(自然科学版)》【年(卷),期】2012(011)002【总页数】4页(P150-153)【关键词】Matlab;模糊PID;汽包水位【作者】金璐;陈勇【作者单位】南京师范大学电气与自动化工程学院,江苏南京210042;淮阴师范学院物理与电子电气工程学院,江苏淮安223300【正文语种】中文【中图分类】TP272锅炉是化工、石油、电力等工业部门的重要热源、能源动力设备[1],锅炉控制系统的水平已经成为衡量锅炉性能的一个重要因素.锅炉控制是一个比较复杂的控制过程,各个环节的工艺参数必须严格控制,而汽包水位控制系统是锅炉自动控制系统中最重要的环节,汽包水位是锅炉正常运行的重要参数,维持汽包水位在一定的范围内变化,是锅炉水位控制的重要任务之一.随着锅炉汽包水位的控制应用领域的不断扩大,要求控制系统设计简易、成本低廉、控制算法合理、开发周期短,建立锅炉汽包水位控制系统的仿真模型,可以充分利用计算机仿真的优越性,人为地改变系统的结构、加入不同的扰动和参数变化,以便考察系统在不同结构和不同工况下的动态特性[2].本文在分析锅炉汽包水位控制数学模型的基础上,对通常的运动控制系统仿真模型进行了改进,并借助于Matlab/Simulink强大的仿真建模能力,建立了锅炉汽包水位控制系统的计算机仿真模型.锅炉汽包中储水量的变化是由汽包水位决定的[3],在水位下汽泡容积的变化过程趋于平衡时,水位的逐渐上升反映了汽包中储水量的增加,因为给水温度比汽包内饱和水的温度低,当给水流量增加后,原有饱和水中的部分热量就被吸收,所以水位下汽泡容积有所减少.锅炉的给水流量实际反映了给水控制系统的操纵变量,可以把汽包水位看作单容量无自衡过程.用传递函数G1表示锅炉汽包水位H与给水流量W之间关系,如果给水量为阶跃变化时,汽包水位在起始状态不会迅速增加,而是呈现出起始惯性段,此过程可近似于积分环节与时滞环节的串联系统特性,G1可表示为:式中,S为拉普拉斯算子,T1为时间常数,k1为给水单位流量改变时锅炉水位变化速度.用传递函数G2表示“虚假水位”时水位H与蒸汽流量D之间关系,所谓“虚假水位”,即蒸汽流量突然增加时,水位先上升,然后再下降,而不是当蒸汽流量D大于给水量W时,水位应下降,这是因为蒸汽用量增加,瞬间导致汽包压力下降的缘故.(反之,蒸汽流量突然减少时,则水位先下降,然后再上升),G2可表示为:式中,S为拉普拉斯算子,T2为时间常数,k2为放大系数,kf为蒸汽单位流量改变时水位变化速度.模糊PID参数自整定的设计思想是先找出PID三个参数与偏差e和偏差变化率ec 之间的模糊关系[4],为使被控对象具有良好的动、静态性能,在系统控制过程中,通过不断检测偏差e和偏差变化率ec,在线校正参数Kp、Ki和Kd,从而满足不同偏差e 和偏差变化率ec对控制器参数的不同要求.模糊PID控制器通过偏差e和偏差变化率ec作为输入,在线对PID参数进行校正,从而可以实现不同时刻偏差和偏差变化率对PID参数自整定的要求.2.1 模糊PID控制器的组成模糊PID锅炉汽包水位控制是运用模糊控制理论及传统PID控制理论来实现对锅炉汽包水位进行控制的装置[5],其基本组成如图1所示.图1中H0为汽包水位的给定值,H为汽包水位的实际值.汽包水位模糊控制器采用双入单出结构.两个输入变量分别为:水位的偏差e和水位偏差的变化量ec.输出控制量U控制汽包水位调节阀的开度.2.2 参数PID模糊控制规则模糊PID控制器输入变量为e(系统给定值H0与实际输出值H之间的偏差)和(偏差变化率),经模糊控制器后输出语言变量E,偏差变化率Ec,不断校正PID参数KP,Ki 和Kd.可以选取PB,PM,PS,ZO,NS,NM,NB作为偏差语言变量E,偏差e的离散论域为{-3,-2,-1,0,1,2,3},偏差E的隶属函数选用三角函数.选取PB,PM,PS,ZO,NS,NM,NB作为偏差变化率语言变量Ec,偏差变化率ec的离散论域为{-0.3,-0.2,-0.1,0,0.1,0.2,0.3},偏差变化率的隶属函数也选三角形函数.根据PID 控制的基本原理,比例系数KP的作用在于加快系统的响应速度,提高系统调节精度;积分系数Ki的作用在于消除系统的稳态误差;微分系数Kd的作用在于改善系统的动态特性.根据以上控制规则设计锅炉汽包水位控制回路的PID参数模糊控制规则表,如表1-表3所示.采用加权平均法进行反模糊化[4],将模糊推理结果转化为精确值.本文中通过模糊PID控制器,得到模糊控制量所对应的PID参数KP,Ki和Kd的控制增量ΔKP,ΔKi,ΔKd.最后,采用增量式的PID控制算法计算控制系统当前控制增量ΔUi,将ΔUi附加在前一时刻的控制量ΔUi-1上,即可得到当前时刻的输出控制量Ui.在Matlab/Simulink中根据上文PID参数模糊控制规则对锅炉水位控制系统进行了仿真,结果如图3所示,为了方便比较对常规PID控制系统也进行了仿真,仿真曲线如图2所示,比较结果表明模糊PID控制器的超调量较小,稳态误差较小,响应速度快.本文锅炉汽包水位控制采用模糊PID控制原理,在线地对三个参数进行了调整.模糊PID控制器采用二维输入量,即偏差e和偏差变化ec,从仿真结果看,具有较好的控制性能,既达到了较快的响应速度,又抑制了超调量,达到了优化PID控制器和模糊控制器的目的,为锅炉汽包水位控制系统的设计提供了一定的参考价值.【相关文献】[1] 马艳梅.基于DSP的锅炉汽包水位控制系统的控制策略的研究[D].安徽理工大学,2009.[2] 李中宁.基于MATLAB的锅炉水位模糊控制系统的设计和分析[D].长春理工大学, 2008.[3] 陈平,陈小云.基于MATLAB的锅炉水位控制系统的设计与仿真[J].机电技术,2006,29(1):4-5.[4] 刘静纨,魏东,戴正伟.基于模糊PID控制的VAV控制系统研究与实现[J]. 北京理工大学学报,2010,30(8):920-924.[5] 王卓,付冬梅,刘德军.锅炉汽包水位控制系统的研究[J].自动化仪表,2006,27(11):51-56.[6] 沈刚,丛大成,韩俊伟.模糊免疫PID控制在淀粉生产线中的应用[J].农业机械学报,2008,39(10):109-118.[7] 王万召,赵兴涛,宋艳萍.模糊RBF自整定PID控制器在过热汽温控制中应用[J]. 电力自动化设备,2007,27(11):48-50.[8] 胡包钢,应浩.模糊PID控制技术研究发展回顾及其面临的若干重要问题[J]. 自动化学报,2001,27(4):567-584.[9] 杨鹏,文喜星,周伶俐.基于模糊PID控制的静电悬浮研究[J]. 西北工业大学学报,2010,28(2):308-312.[10] 宋淑然,阮耀灿,洪添胜,等. 果园管道喷雾系统药液压力的自整定模糊PID控制[J].农业工程学报,2011,27(6):157-161.。
外文翻译-锅炉燃烧系统的模糊控制
Faintness controller of burning boilerThe text which study series coal powder burning boilers control a scheme, presented heat load system level modules control, and enter the circuit vague courting superior control, simulation results confirm the feasibility of the scheme.Currently, many large domestic plants have adopted computer fire control, and the effect is very good. However, because of our electric energy is very tense, there were many small plants in the pot guarding the plant, especially t-he automatic control system coal powder boilers, and have not been properly addressed. The reason is Coal powder boilers factors to be charged more, strong internal link, external disturbances are frequent and has distinct characteristics and nonlinear characteristics purely lag for automatic control system for high security. Thus the system is a category difficult to control. Although many smallpower plant boilers designed conventional instrumentation system, but did not achieve the desired purpose, and most still use manual control. This is because conventional instruments can only achieve a salt sinks control, not con trolled process changes, not the entire boiler system coordination and control. Development of the mid-1970s .To obscure control theory, Coal powder boiler combustion control system has good performance and achieve giant burning boilers ambiguous control system. Boilers operating system is an important way to achieve automation. Model steam boiler steam drum boiler combustion syst-ems burning pressure is the main target was the transfer of control, causing steam pressure changes a number of factors, such as fuel volume, enter volume, to water, steam flow and the various changes in the nature burn. It is the m-ain disturbance fuel volume change (known as the three), and steam flow changes (known as the three). Changes in the volume of fuel, ignoring some minor factors, the pressure steam boilers similar to the dynamics of the target. Bonus Point forinertial links with the chain link. From the actual process gas pr-essure for the transmission of a certain lag, the time lag in net .We can burn between about 1 s~2s; mathematical models for the systemG (S)=P(S)/M(S)=Ke/ (TS (TZS+1)) (1)Type of P, T pressure steam, and one time constants; a delay of one to powder one time, K ratio factor.This mathematical model, it is only a similar time constants difficult to identify the precise measurements, changes in operating conditions and the presence of system equipment error and other factors will cause the parameters, constant changes, suchchanges resulting mathematical model and the actual syste-m. Often do not match to ensure better control over performance, the use ofvague control is of great significance.Control scheme, boiler combustion system is a complex of three export targets, as seen in figure 1, but exists between the volume of Figure 1 targets ex-pressed by the actual in depth study,It found that : the main chamber pressur-e from the wind and enter the film, and the volume of its other effects are smallit can be fuel volume, Steam chamber pressure as the pressure brought fans ofthe former fed single circuit control Unification.. In addition, the plan is to ensure access to the traditional economic practices combustion boilers that fall through a synthesizing Calibration of gasblast wind of synthesizing. Departmentcited various constraints s methods as a result of the effect is not ideal C27, first as a means of economic control of the main temple burned Zr0 mutilated synthesizing checking device is expensive, life short; Secondly, the longerthe time lag synthesizing signals when the load changes, the volume of coal mutations, synthesizing not timely response, maintained the original air blow volume will inevitably cause giant roast inadequate. Therefore, we do not adopt such an approach, but to use thermal efficiency than coal and wind between peaks identity to chamber temperature accused of using courting superior control, automatic search of the best wind than coal. So that the fuel can design for two inches as mutually independent and affiliated control systems that heat load control systems (to maintain steam pressure) roast economic control syste-m (P O With the best wind / coal than). The diagram showed in figure 1. Usedto control steam pressure on the chamber temperature control parameters for deputy to vapour pressure for control parameters string level control. In terms of timing, because chamber temperature much more than vapour pressure advance, and inertia time constants are smaller. Advance .To the volume of coal toovercome system transition time, the volume of superlarge, the slow recovery of the parameters, such as poor quality control shortcomings, but also for people deputy circuit into disturbances (such as greenhouses, cited wind, chamber pressure, the volume of coal, coal, etc.) has a fairly strong anti-interference capability. Plans for China had to powder machine rotational speed, fans of The Ir. Proportionalto the rotational speed with powder machine to achieve rate control, as fans often rough-and will adjust to the optimal working point for the work points near. When changes to the volume of coal, fans correspondingly changed, chamber temperature changes at this time since an excellent startam-biguous signal controllers, automatic search of the best wind than coal.Control algorithms vague control algorithms, ambiguous signal controllers Kan said one reason single two-part, the acquisition of control is part of the Separation Line algorithms table, partly by the control table online algorithm. Separation Line algorithm is based on the experience of operators, based on fuzy math synthetic reasoning process, with the ultimate aim of producing a blured controller for the on-line application control enquiries table (that is, vaguecontrol table). Online algorithm is actually table export control process. The lessons learned from artificial vague control table is very crude, causing crude -easons, is vague in defining subset. Fully rely on the subjective and will not necessarily realistic. The need to control online vague control table online ame-nded. We therefore adopted a vague signal controller to improve. Compared with the basic ambiguity controller, which added a vague controller parameters will be online from the agency. The agency revised algorithm is based on fakeintelligence people controlled thinking, analysis and identification system exportstatus, dynamically independently conducted online amended to adjust the cont-rol of the entire process simulation tests according to control a scheme, and the use of (1) a mathematical model parameters elected T1=120s,T2=60s, t=20s lag time, sampling cycle circuit as is, outside circuit for 2so P=3 a number of gas pressure circuit emulation, Figure spirit vapour pressure vague stringclass control system diagram Figure 5 gives the string class vague control simulation curve, and in Bands touring interference. The results can be seen by the simulation operation, the string class vague control has strong antinterference- capability, the use of improved Ambiguous signal controllers for boiler combustion control system has a very good performance.So, the wind coal than courting distinctions blurred control algorithms in thetrial operation of a boiler plant coal powder, if testing elements (temperature Heat, Puppet kits) installed suitable location, the operating results were very good. As this is an excellent control of the export of a fifteenvolume amendment, thus, isparticularly applicable to coal volatile occasions.锅炉燃烧系统的模糊控制本文研究了煤粉锅炉燃烧系统的控制方案,提出了热负荷系统的串级模糊控制,及送风回路的模糊自寻优控制,仿真结果证实了该方案的可行性。
电力系统英语
智能终端---- In tellige nt Termi nal模糊控制---- Fuzzy Con trol组态---- Con figurati on仿真---- Simulatio n冗余---- Redundant客户/服务器--- Client/Server网络---- Network设备网——DeviceNET 基金会现场总线foundation fieldbus (FF)现场总线---- Fieldbus以太网---- Ethernet变频器---- In verter脉宽调制——Pulse Width Modulation (PWM)伺服驱动器Servo Driver软起动器一一Soft Starter 步进Step-by-Step控制阀---- Co ntrol Valver流量计---- Flowmeter仪表---- In strume nt记录仪---- Recorder传感器---- Sen sor智能传感器---- Smart Se nsor智能变送器---- Smart Tran sducer虚拟仪器------ Virtual In strume nt主站/ 从站 --- Master Statio n/Slave stati on操作员站/工程师站/管理员站---- Operator Station/Engineer Station/Manager Station电力专业英语(1)元件设备三绕组变压器:three-colum n tran sformer ThrCl nTrans双绕组变压器:double-colu mn tra nsformer DblCl mnTrans电容器:Capacitor并联电容器:shunt capacitor电抗器:Reactor母线:Busbar输电线:TransmissionLine发电厂:power plant断路器:Breaker刀闸(隔离开关):Isolator分接头:tap电动机:motor(2)状态参数有功:active power无功:reactive power电流:current容量:capacity电压:voltage档位:tap position有功损耗:reactive loss无功损耗:active loss功率因数:power-factor功率:power功角:power-angle电压等级:voltage grade空载损耗:no-load loss铁损:iron loss铜损:copper loss空载电流:no-load current阻抗:impedance正序阻抗:positive sequence impedance负序阻抗:negative sequence impedance零序阻抗:zero sequence impedance电阻:resistor电抗:reactance电导:conductance电纳:susceptance无功负载:reactive load 或者QLoad有功负载: active load PLoad遥测:YC(telemetering)遥信:YX励磁电流(转子电流):magnetizing current定子:stator功角:power-angle上限:upper limit下限:lower limit并列的:apposable高压: high voltage低压:low voltage中压:middle voltage电力系统power system发电机generator励磁excitation励磁器excitor电压voltage电流current母线bus变压器transformer升压变压器step-up transformer高压侧high side输电系统power transmission system输电线transmission line固定串联电容补偿fixed series capacitor compensation稳定stability电压稳定voltage stability功角稳定angle stability暂态稳定transient stability电厂power plant能量输送power transfer交流AC装机容量installed capacity电网power system落点drop point开关站switch station双回同杆并架double-circuit lines on the same tower 变电站transformer substation补偿度degree of compensation高抗high voltage shunt reactor无功补偿reactive power compensation故障fault调节regulation裕度magin三相故障three phase fault故障切除时间fault clearing time极限切除时间critical clearing time切机generator triping高顶值high limited value强行励磁reinforced excitation线路补偿器LDC(line drop compensation)机端generator terminal静态static (state)动态dynamic (state)单机无穷大系统one machine - infinity bus system机端电压控制AVR电抗reactance电阻resistance功角power angle有功(功率)active power无功(功率)reactive power功率因数power factor无功电流reactive current下降特性droop characteristics斜率slope额定rating变比ratio参考值reference value电压互感器PT分接头tap下降率droop rate仿真分析simulation analysis传递函数transfer function框图block diagram受端receive-side裕度margin同步synchronization失去同步loss of synchronization阻尼damping摇摆swing保护断路器circuit breaker电阻:resistance电抗:reactance阻抗:impedance电导:conductance电纳:susceptance导纳:admittance电感:inductance电容: capacitance常用电力专业英语(1)元件设备三绕组变压器:three-column transformer ThrClnTrans 双绕组变压器:double-column transformer DblClmnTrans 电容器:Capacitor 并联电容器:shunt capacitor 电抗器:Reactor母线:Busbar输电线:TransmissionLine 发电厂:power plant 断路器:Breaker 刀闸(隔离开关):Isolator 分接头:tap电动机:motor(2)状态参数有功:active power无功:reactive power电流:current容量:capacity电压:voltage档位:tap position有功损耗:reactive loss 无功损耗:active loss 功率因数:power-factor 功率:power 功角:power-angle 电压等级:voltage grade 空载损耗:no-load loss 铁损:iron loss 铜损:copper loss 空载电流:no-load current 阻抗:impedance 正序阻抗:positive sequence impedance 负序阻抗:negative sequence impedance 零序阻抗:zero sequence impedance 电阻:resistor 电抗:reactance 电导:conductance 电纳:susceptance无功负载:reactive load 或者QLoad 有功负载: active load PLoad 遥测:YC(telemetering) 遥信:YX 励磁电流(转子电流):magnetizing current 定子:stator 功角:power-angle 上限:upper limit 下限:lower limit 并列的:apposable 高压: high voltage 低压:low voltage 中压:middle voltage 单位标准:正确错误电能:千瓦时kW.h k,h 小写W 大写有功功率千瓦kW k 小写W 大写无功功率千乏kvar k,v,a,r 均小写视在功率千伏安kVA k小写V、A大写电压千伏kV k 小写V 大写长度千米km k,m 均小写电流安培 A A 大写电力系统power system 发电机generator 励磁excitation 励磁器excitor 电压voltage 电流current 母线bus 变压器transformer 升压变压器step-up transformer 高压侧high side 输电系统power transmission system 输电线transmission line 固定串联电容补偿fixed series capacitor compensation 稳定stability 电压稳定voltage stability 功角稳定angle stability 暂态稳定transient stability 电厂power plant 能量输送power transfer 交流AC 装机容量installed capacity 电网power system 落点drop point 开关站switch station 双回同杆并架double-circuit lines on the same tower 变电站transformer substation 补偿度degree of compensation 高抗high voltage shunt reactor 无功补偿reactive power compensation 故障fault 调节regulation 裕度magin 三相故障three phase fault 故障切除时间fault clearing time极限切除时间critical clearing time 切机generator triping 高顶值high limited value 强行励磁reinforced excitation 线路补偿器LDC(line drop compensation) 机端generator terminal 静态static (state) 动态dynamic (state) 单机无穷大系统one machine - infinity bus system 机端电压控制AVR 电抗reactance 电阻resistance 功角power angle 有功(功率) active power 无功(功率) reactive power 功率因数power factor 无功电流reactive current 下降特性droop characteristics 斜率slope 额定rating 变比ratio 参考值reference value 电压互感器PT 分接头tap 下降率droop rate 仿真分析simulation analysis 传递函数transfer function 框图block diagram 受端receive-side 裕度margin 同步synchronization 失去同步loss of synchronization 阻尼damping 摇摆swing 保护断路器circuit breaker 电阻:resistance 电抗:reactance 阻抗:impedance 电导:conductance 电纳:susceptance 导纳:admittance 电感:inductance 电容: capacitance热工自动化常用英文缩写词ABC Automatic boiler control 锅炉自动控制AC Alternating current 交流(电)ACC Automatic combustion control 燃烧自动控制ACP Auxiliary control panel 辅助控制盘ACS Automatic control system 自动控制系统ACT actuator 执行机构A/D Analog /digital(conversion)模/数(转换)ADP Annunciation display panel 报警显示板AEH Analog electro- 模拟式电液调节AFC Air flow control ' 送风控制AGC Automatic generation control 自动发电量控制AI Analog input 模拟量输入A/M Automatic/manul 自动/手动AO Analog output 模拟量输入APC Automatic plant control 电厂自动控制ASS Automatic synchronized system 自动同期系统ARP Auxiliary relay panel 辅助继电器盘ATC Automatic turbine startup or shutdown control system 汽轮机自启停系统BCS Burner control system 燃烧器控制系统BF Boiler follow 锅炉跟踪BFC Boiler fuel control 锅炉燃料控制BPS By-pass control system 旁路控制系统BTG Boiler turbinegenerator(panel)锅炉、汽轮机、发电机(控制盘)CCR Central control room 单元(中央)控制室CHS Coal handing system 输煤控制系统CJC Cold junction compensator 冷端补偿器CPU Central processing unit 中央处理器CRT Cathode-ray tube 阴极射线管屏幕显示器D/A Digtal/analog(conversion)数/模(转换)DAS Data acquisition system 计算机监视系统或数据采集系统DC Direct current 直流(电)DCE Data circuit-terminating equipment 数据电路终端设备DCS Distributed control system 分散控制系统DDC Direct digital control 直接数字控制DDP Distributed datd processing 分散数据处理DEH Digital electro-hydraulic control system 数字式电液控制系统DI Digital input 数字量输入DMP Damper 挡板、风门DO Digital output 数字量输出DSB Distributed switch-board 配电盘DTE Data terminal equipment 数据中端设备EEPROM Electrically-erasable programmable read only mrmory 电可擦写只读存储器E/P Electro/pneumatic(converter)电/气(转换器)EPROM Electrically programmable read only memory 电可编程只读存储器ES Expert system 专家系统ETS Emergency trip system 紧急停机系统EWS Engineer wok station 工程师工作站FA Full arc 全周进汽FB Field bus 现场总线FCB Fast cut back (机组)快速甩负荷FDC Furnace draft control 炉膛压力控制FSS Furnace safety system 炉膛安全系统FSSS Furnace safeguard supervisory system 锅炉炉膛安全监控系统GV Governor valve 调节阀门HBP High-pressure by-pass valve 高压旁路I&C Instrumentation &control 仪表与控制INT Interlock 连锁I/O Input/output 输入/ 输出IDP Integrated data processing 集中数据处理KB Keyboard 键盘LBP Low-pressure by-pass valve 低压旁路LCD Liquid-crystal display 液晶显示器LED Light emitting diode 发光二极管LS Limit switch 限位开关LS Level switch 液位开关M/A Manual/automatic 手动/自动MAX Maximum 最大值MCC Motor control center 电动机控制中心MCR Maximum continuous rating 最大连续运行负荷MCS Modulating control system 模拟量控制系统MEH (BFTP)micro-electro-hydraulic control system (锅炉给水泵汽轮机)电液控制系统MFT Master fuel trip 总燃料跳闸MHC Mechanicial hydraulic control 机械液压式控制MIN Minimum 最小值MIS Management information syrtem 管理信息系统MTBF Mean time between failures 平均无故障工作时间MTTF Mean time to failure MTTR Mean time to repair NC Normally Closed 常闭NO Normally open 常开失效(故障)前平均工作时间平均故障修复时间OCS On-off control system 开关量控制系统OEI Optic electric interface 光电接口OFT Oil fuel trip 燃油跳闸OPC Overspeed protection CONTROL 超速保护控制OS Operator station 操作员站PA Partial arc 部分进汽PC Programmable controller 可编程控制器PCS Pulverizer control system 磨煤机控制系统PI Purse input 脉冲量输入PID Proportional integral derivative 比例-积分-微分PLC Programmable logic controller 可编程序逻辑控制器PO Pulse output 脉冲量输出RAM Random access memory 随机存取存储器RB Run back (辅机故障)快速甩负荷ROM Read only memory 只读存储器RTC Reheat steam temperature control 再热气温控制SBC Soot blower control system 吹灰控制系统SCM Single chip microcomputer 单片机SCS Sequence control system 顺序控制系统SER Sequence events recorder 事件顺序记录仪SOE Sequence of events 事件顺序记录ST Smart transmitter 智能变送器STC Superheated steam temperature control 过热气温控制TAS Turbine automatic system 汽轮机自动控制系统TBP Tuibine by-pass system 汽轮机旁路系统TCS Turbine control system 汽轮机控制系统TF Turbine follow 汽轮机跟踪TSI Turbine supervisory instrument 汽轮机监视仪表UCC Unit coordinated control 机组协调控制ULD Unit load demand(command)机组负荷指令UPS Uninterrupted power system 不间断电源WTS Water treatment contrd system 水处理控制系统7 月24 日电力专业英语电力专业英语carrie85 lj0185(1)元件设备三绕组变压器:three-column transformer ThrClnTrans 双绕组变压器:double-column transformer DblClmnTrans 电容器:Capacitor并联电容器:shunt capacitor 电抗器:Reactor 母线:Busbar 输电线:TransmissionLine 发电厂:power plant 断路器:Breaker 刀闸(隔离开关):Isolator 分接头:tap 电动机:motor(2)状态参数有功:active power无功:reactive power电流:current 容量:capacity 电压:voltage 档位:tap position 有功损耗:reactive loss 无功损耗:active loss 功率因数:power-factor 功率:power 功角:power-angle 电压等级:voltage grade 空载损耗:no-load loss 铁损:iron loss 铜损:copper loss 空载电流:no-load current 阻抗:impedance 正序阻抗:positive sequence impedance 负序阻抗:negative sequence impedance 零序阻抗:zero sequence impedance 电阻:resistor 电抗:reactance 电导:conductance 电纳:susceptance 无功负载:reactive load 或者QLoad 有功负载: active load PLoad 遥测:YC(telemetering) 遥信:YX 励磁电流(转子电流):magnetizing current 定子:stator 功角:power-angle 上限:upper limit 下限:lower limit 并列的:apposable 高压: high voltage 低压:low voltage 中压:middle voltage 电力系统power system 发电机generator 励磁excitation 励磁器excitor 电压voltage 电流current 母线bus 变压器transformer升压变压器step-up transformer 高压侧high side 输电系统power transmission system 输电线transmission line 固定串联电容补偿fixed series capacitor compensation 稳定stability 电压稳定voltage stability 功角稳定angle stability 暂态稳定transient stability 电厂power plant 能量输送power transfer 交流AC 装机容量installed capacity 电网power system 落点drop point 开关站switch station 双回同杆并架double-circuit lines on the same tower 变电站transformer substation 补偿度degree of compensation 高抗high voltage shunt reactor 无功补偿reactive power compensation 故障fault 调节regulation 裕度magin 三相故障three phase fault 故障切除时间fault clearing time 极限切除时间critical clearing time 切机generator triping 高顶值high limited value 强行励磁reinforced excitation线路补偿器LDC(line drop compensation) 机端generator terminal 静态static (state) 动态dynamic (state) 单机无穷大系统one machine - infinity bus system 机端电压控制AVR 电抗reactance 电阻resistance 功角power angle 有功(功率) active power 无功(功率) reactive power 功率因数power factor 无功电流reactive current 下降特性droop characteristics斜率slope 额定rating 变比ratio 参考值reference value 电压互感器PT 分接头tap下降率droop rate 仿真分析simulation analysis 传递函数transfer function 框图block diagram 受端receive-side 裕度margin 同步synchronization 失去同步loss ofsynchronization 阻尼damping 摇摆swing 保护断路器circuit breaker 电阻:resistance 电抗:reactance 阻抗:impedance 电导:conductance 电纳:susceptance 导纳:admittance 电感:inductance 电容: capacitanceAGC Automatic Generation Control 自动发电控制AMR Automatic Message Recording 自动抄表ASS Automatic Synchronized System 自动准同期装置ATS Automatic Transform System 厂用电源快速切换装置AVR Automatic V oltage Regulator 自动电压调节器BCS Burner Control System 燃烧器控制系统BMS Burner Management System 燃烧器管理系统CCS Coordinated Control System 协调控制系统CISConsumer Information System 用户信息系统CRMS Control Room ManagementSystem 控制室管理系统CRT Cathode Ray Tube 阴极射线管DA DistributionAutomation 配电自动化DAS Data Acquisition System 数据采集与处理系统DCS Distributed Control System 分散控制系统DDC Direct Digital Control 直接数字控制(系统)DEH Digital Electronic Hydraulic Control 数字电液(调节系统) DMS Distribution Management System 配电管理系统DPU Distributed Processing Unit 分布式处理单元DSM Demand Side Management 需求侧管理EMS Energy Management System 能量管理系统ETS Emergency Trip System 汽轮机紧急跳闸系统EWS Engineering Working Station 工程师工作站FA Feeder Automation 馈线自动化FCS Fieldbus Control System 现场总线控制系统FSS Fuel Safety System 燃料安全系统FSSS Furnace Safeguard Supervisory System 炉膛安全监控系统FTU Feeder Terminal Unit 馈线远方终端GIS Gas Insulated Switchgear 气体绝缘开关设备GPS Global Position System 全球定位系统HCS Hierarchical Control System 分级控制系统LCD Liquid Crystal Display 液晶显示屏LCP Local Control Panel 就地控制柜MCC Motor Control Center (电动机)马达控制中心MCS Modulating Control System 模拟量控制系统MEH Micro Electro Hydraulic Control System 给水泵汽轮机电波控制系统MISManagement Information System 管理信息系统NCS Net Control System 网络监控系统OIS Operator Interface Station 操作员接口站OMS Outage Management System 停电管理系统PAS Power Application Software 电力应用软件PID Proportion Integration Differentiation 比例积分微分PIO Process Input Output 过程输入输出(通道)PLC Programmable Logical Controller 可编程逻辑控制器PSS Power System Stabilizator 电力系统稳定器RTU Remote Terminal Unit 站内远方终端SA Substation Automation 变电站自动化文档来源为:从网络收集整理.word 版本可编辑.欢迎下载支持SCADA Supervisory Control And Data Acquisition 数据采集与监控系统SCCSupervisory Computer Control 监督控制系统SCS Sequence Control System 顺序(程序)控制系统SIS Supervisory Information System 监控信息系统TDCS (TDC)Total Direct Digital Control 集散控制系统TSI Turbine Supervisory Instrumentation 汽轮机监测仪表UPS Uninterrupted PowerSupply 不间断供电WMS Work Management System 工作管理系统11文档收集于互联网,如有不妥请联系删。
自适应内模控制
控 制 理 论 与 应 用Control Theory & Applications收稿日期:-年-月-日;修回日期:-年-月-日.1 1文章编号:******自适应内模控制摘要:为了降低系统模型参数变化对测试转台控制系统的影响,提出了基于惯量辨识技术的自适应内模控制方案。
首先建立了某型号测试转台数学模型,设计了测试转台内模控制器,在此基础上采用基于扰动转矩观测器的惯量辨识算法来辨识测试转台转动惯量的变化情况,然后通过模糊控制器根据转动惯量的变化自动调整内模控制器的参数,从而确保了控制器的控制性能。
仿真和实验结果表明,该控制方案对惯量的变化有着很强的自适应性,提高了测试转台控制系统的抗干扰性能和系统的鲁棒性,取得了较好的控制效果。
关键词:测试转台;参数变化;内模控制;惯量辨识;模糊控制;自适应控制 中图分类号:TP273 文献标识码:AAdaptive internal model control of *******Abstract :In order to reduce the influence of variation of model parameters to the test turntable, an adaptive IMC based on inertia identification technology is proposed. Firstly, an IMC controller is designed based on the mathematical model of a type of test turntable. Then the inertia identification method using disturbance observer is proposed to identify the inertia variations of the test turntable. And a fuzzy logic controller is introduced to adjust the parameters of the IMC controller online with the inertia variations to ensure the effectiveness of the system. Simulation and experimental results show that the proposed scheme has a strong adaptation to the inertia variations which can enhance the disturbance rejection property and improve the robustness of the system.Key words : test turntable; parameter variation; internal mode control; inertia identification; fuzzy controller; adaptation control1 引言(Introduction )惯性导航与制导技术的发展水平是决定航空、航天和航海技术发展的重要因素,而高精度、高性能的测试转台是惯性导航与制导技术发展的有力保障[1]。
中英文翻译--电锅炉系统

中文2570字Electric Boiler SystemThe boiler to electric power for energy, heating through the electric heating tube heating, air conditioning or sanitation with hot water, heating it faster, high thermal efficiency, small size, no noise, modular heating, energy conservation, the installation of easy to use, a combination of all aspects of domestic and foreign advanced technology from the latest generation of products.Control PrincipleBoiler YLZK series used computer controller. I absorb advanced foreign technology companies, combined with domestic boiler control automation applications and specific needs of the status quo, the use of modern computer-controlled technology, and the introduction of a new generation of boiler controller. Apply to steam boilers, hot water boilers and automatic control of heat-conducting oil furnace, high reliability, high degree of automation, easy to use, easy to operate, feature-rich, flexible control, beautiful model, high cost performance.This machine adopts intelligent modular IPC (iPC) as the core control system. Smart Modular Industrial Computer (iPC) is a serial bus based on a variety of industrial control modules computer systems. As a result of the serial bus, which used more than ever parallel bus (such as STD, PC104, ISA, etc.) have more advantages. It is each module with a microprocessor (CPU) of the intelligent unit, itself a powerful programmable function independently of the unit features a variety of complex, computer controller boiler is the most advanced products.With the boiler water temperature control, boiler water level control, backwater temperature detection, the second backwater valve electric control, water protection, over-temperature protection, automatic control functions such as timing control.Control the plant-type electric boiler is a combination of various aspects of technology at home and abroad to form a new generation of products. It uses the principle of fuzzy control, combined with PLC controllers, temperature sensors, the system constitutes a closed-loop regulation. By temperature and the optimal operation of the principle of energy conservation, with changes in temperature, the temperature control system for continuous sampling, logic and artificial neural computing control algorithms adjust operations in order to achieve the purpose of automatic thermostat.Features(1) for the use of touch-screen interface, the realization of human-computerdialogue, easy-to-understand, easy to learn, easy to remember, easy to operate. Through the screen to check the function keys can be set and modify a variety of adjustment parameters.(2) the core system control PLC, great flexibility of its programmable logic processing capability with high speed and reliability.(3) organizations to adopt the international advanced the implementation of electrical components.(4) Controller with Built-in real-time clock calendar. System users can request, at any time to set up a number of different temperature settings to achieve the best energy-saving effect.(5) boiler control cabinet has a stop, over-temperature, over-pressure, short circuit, leakage, lack of phase, such as over-current protection, the boiler is running more stable and safe.(6) to peripheral storage boiler water storage tanks, the use of night-time trough of hot water heating to 95 ℃, storage tanks for storage, the day after the use of heat exchangers for heat exchangers for power grid Valley start-up the role of Tim Clipping run more economy.(7) boiler load function can be changed, health water and air-conditioning or hot water can be provided separately to provide cross-play of a machine or machines with multi-purpose use.(8) boilers to use the most clean energy - electricity, true green, zero emission, to maximize the protection of human life.Unit performance parameters Description:Rated hot water heating export / import Temperature: 85 ℃ / 65 ℃ (a backwater pressure electric water temperature: 95 ℃ / 70 ℃)Working pressure: atmospheric pressure (pressure electric water boiler and pressure 0.7MPa/1.0MPa)The scope for automatic adjustment of heat (no thermostat level) :10-100%Power: 380 ∨ 50HzAllowed outlet temperature: 85 ℃ (specification <90 ℃)All boiler water should be attached to GB1576-2001 "industrial boiler water" requirement.Boiler structureThe overall structure of the boiler and auxiliary equipment of two major parts.Boiler in the furnace, drum, burner, wall superheater, economizer, air preheater, furnace wall structure and composition of major components of the core of the production of steam, known as the boiler. Boiler in the two most important components are the furnace and the drum.Also known as furnace combustion chamber, fuel combustion for space. Will be on solid fuel on the grate for the fire-bed combustion furnace known as the layer burning stoves, also known as the fire-bed furnace; will be liquid, gas or ground into a powder of the solid fuel, is injected into the combustion chamber of the furnace of fire known as the Room burning furnace, furnace room, also known as the fire; air will hold its coal combustion was boiling and low-grade fuel for combustion furnace known as the boiling furnace, also known as the fluidized bed furnace; the use of coal particles of air flow so that high-speed rotation, and strongly burning furnace of cylindrical furnace known as the Tornado.Furnace cross-section of generally square or rectangular. Fuel combustion in the furnace flame and high temperature flue gas to form, so the stove around the furnace wall by the high temperature materials and thermal insulation materials. In the furnace wall on the inner surface of the regular laying of water-wall tube, it will not burn the protection of furnace wall and the flame and high temperature flue gas to absorb the large number of radiant heat.Furnace designed to take full account of the characteristics of the use of fuel. Each boiler shall be fueled with the original design as much as possible fuel. Burning characteristics of the larger difference in fuel economy when the boiler operation and reliability can be reduced.Drum is a natural cycle and multiple forced circulation boiler, the economizer to accept the water supply, circuit connection to the steam superheater cylinder delivery device described. Traditional drum made from high quality thick steel plate is a boiler in one of the most important components.Drum's main function is water, soft drinks to the separation of pot ruled out running in the saline water and mud residue, to avoid high concentrations of salt and impurities in the boiler water with the steam entering the superheater and the steam turbine in.Device includes an internal drum separator and steam cleaning equipment, water distribution pipes, sewage processing equipment such as drugs. Separator device which is to come from the wall and the saturated steam from the water and tominimize the steam in small water droplets carried. , The low-pressure boilers used as a baffle and baffle gap separating coarse components; over medium-pressure boiler in addition to a variety of widely used types of cyclone for the separation of rough, but also with 100 windows, steel mesh or steam, etc. are carried out further separated. Drum water level is also equipped with a table, a safety valve, such as monitoring and protection facilities.To assess performance and to improve the design, often have to go through the boiler heat balance test. Directly from the efficient use of energy to calculate the thermal efficiency of boiler is a balanced approach is called, from a variety of heat loss to the efficiency of counter-balance method is called counter-balance. Consider the practical benefits of the boiler room not only depends on the thermal efficiency of boilers, but also taking into account the auxiliary boiler and the amount of energy.Unit mass or unit volume of fuel combustion, the chemical reaction is calculated according to the theory of air known as air traffic demand. In order to make the fuel in the furnace, there are more opportunities for contact with oxygen combustion, the actual volume of air into the furnace is greater than the total theoretical air. Although more air into the incomplete combustion can reduce heat loss, but the smoke will increase heat loss, but also exacerbate corrosion of sulfur oxides and nitrogen oxides generated. Therefore efforts should be made to improve the combustion technology for small to minimize the excess air ratio so that the combustion chamber completely.Boiler flue gas contained dust (including fly ash and carbon black), oxides of sulfur and nitrogen pollution in the atmosphere are the material, without purification of their emission targets can be achieved several times indicators of environmental protection provisions of the several dozen times. Emissions control measures of these substances have a pre-combustion, improved combustion technology, dedusting, desulfurization and denitrification, such as. High chimney with only the area around the chimney to reduce atmospheric concentrations of pollutants.Flue gas dust removal of the force used by gravity, centrifugal force, inertia force of adhesion, as well as sound waves, static electricity and so on. Generally used for coarse particle sedimentation and inertial force of gravity separation, at a high capacity centrifugal separation under the regular use of electrostatic precipitators and bag dust filter with high collection efficiency. And the Sultan's wet - water film dust collector in the droplet adhesion film can fly, can absorb a very high collection efficiency of gaseous pollutants.The twentieth century since the 50's, people strive to develop comprehensive utilization of ash, Wei of harm. Ash manufacturers such as cement, brick and concrete aggregate and other construction materials. 70s extract from fly ash from Cenosphere, such as a fire-resistant insulation materials.Boiler future development will further enhance the thermal efficiency of boilers and power plants; boilers and power plants to reduce the unit cost of power equipment; to improve the operation of boiler unit level of flexibility and automation; to develop more varieties to suit different boiler fuel; raise the boiler unit and its the operation of auxiliary equipment reliability; to reduce environmental pollution.电锅炉系统该锅炉以电力为能源,通过电加热管加热供暖、空调或卫生用热水,该机加热快、热效率高、体积小、无噪音、模块式供热、节约能源、安装使用方便、综合了国内外各方面先进技术而成的最新一代产品。
模糊控制理论外文文献翻译

模糊控制理论概述模糊逻辑广泛适用于机械控制。
这个词本身激发一个一定的怀疑,试探相当于“仓促的逻辑”或“虚假的逻辑”,但“模糊”不是指一个部分缺乏严格性的方法,而这样的事实,即逻辑涉及能处理的概念,不能被表达为“对”或“否”,而是因为“部分真实”。
虽然遗传算法和神经网络可以执行一样模糊逻辑在很多情况下,模糊逻辑的优点是解决这个问题的方法,能够被铸造方面接线员能了解,以便他们的经验,可用于设计的控制器。
这让它更容易完成机械化已成功由人执行。
历史以及应用模糊逻辑首先被提出是有Lotfi在加州大学伯克利分校在1965年的一篇论文。
他阐述了他的观点在1973年的一篇论文的概念,介绍了语言变量”,在这篇文章中相当于一个变量定义为一个模糊集合。
其他研究打乱了,第二次工业应用中,水泥窑建在丹麦,即将到来的在线1975。
模糊系统在很大程度上在美国被忽略了,因为他们更多关注的是人工智能,一个被过分吹嘘的领域,尤其是在1980年中期年代,导致在诚信缺失的商业领域。
然而日本人对这个却没有偏见和忽略,模糊系统引发日立的Seiji Yasunobu和Soji Yasunobu Miyamoto的兴趣。
,他于1985年的模拟,证明了模糊控制系统对仙台铁路的控制的优越性。
他们的想法是被接受了,并将模糊系统用来控制加速、制动、和停车,当线于1987年开业。
1987年另一项促进模糊系统的兴趣。
在一个国际会议在东京的模糊研究那一年,Yamakawa论证<使用模糊控制,通过一系列简单的专用模糊逻辑芯片,在一个“倒立摆“实验。
这是一个经典的控制问题,在这一过程中,车辆努力保持杆安装在顶部用铰链正直来回移动。
这次展示给观察者家们留下了深刻的印象,以及后来的实验,他登上一Yamakawa酒杯包含水或甚至一只活老鼠的顶部的钟摆。
该系统在两种情况下,保持稳定。
Yamakawa最终继续组织自己的fuzzy-systems研究实验室帮助利用自己的专利在田地里的时候。
BOILER CONTROLLER

专利名称:BOILER CONTROLLER发明人:OSHIMA HIROSHI,MIYAMA YUKIO 申请号:JP13031988申请日:19880530公开号:JPH01300101A公开日:19891204专利内容由知识产权出版社提供摘要:PURPOSE:To perform such control as to minimize starting loss while maintaing opti mum rates of temperature rise and pressure rise by inferring a rate of change of fluid temperature by a fluid temperature change rate-inferring part incorporating a fuzzy inference function which uses a rate of change of steam temperature and a maximum thermal stress as input data, and controlling the rate of change of fluid temperature with the inferred rate of change as a set point. CONSTITUTION:When a requirement such as a scheduled time of end of starting is changed during a boiler starting operation, control rules for fuzzy inference in a steam temperature change rate-calculating part 80 are changed, for instance, a life consumption is changed from 80% to 90% whereas a limit for rate of change of steam temperature is raise, by a control rule change signal 85 supplied from a keyboard 94 through a simulator 92, and simulation is repeated until a result corresponding to the change in requirement is obtained. A control of a plant is maintained in the present condition by outputting a control-stopping signal 84 from the simulator 92 to a controlling part 81, and the control-stopping signal84 is not added or removed until a new manipulated variable signal 61 according to the change in requirement is obtained. This function makes it possible to cope with a change in operation requirements and to perform control with due consideration of safety.申请人:BABCOCK HITACHI KK 更多信息请下载全文后查看。
模糊控制相关英语
模糊控制相关英语Fuzzy control (模糊控制) is a control method based on fuzzy logic, which is a mathematical framework for dealing with uncertainty and imprecision. It is used to control systems that are difficult to model or have complex dynamics.Fuzzy control works by using linguistic variables, which are variables that are expressed using natural language terms rather than precise numerical values. These linguistic variables are defined using fuzzy sets, which describe the membership function of each term. The fuzzy sets aretypically represented by fuzzy if-then rules, which incorporate expert knowledge or empirical data.Fuzzy control uses a fuzzy inference system to combine the input variables and apply the fuzzy rules to determine the output. The input variables are fuzzified, which means converting the crisp numerical values into fuzzy values based on their membership to the fuzzy sets. The fuzzy rules are then applied to the fuzzy input variables to determine the fuzzy output variables. Finally, the fuzzy output variables are defuzzified to obtain crisp numerical values for control actions.Fuzzy control has been successfully applied in various fields, such as robotics, process control, and traffic control. It has the advantage of being able to handle complex systems with imprecise or incomplete information. It can also capture the knowledge and expertise of human operators or experts in the form of linguistic rules, making it a useful tool for systems that lack mathematical models.In summary, fuzzy control is a control method based on fuzzy logic that allows for the control of systems with uncertain or imprecise information. It uses linguistic variables, fuzzy sets, and fuzzy rules to determine control actions.。
工业锅炉的变氧量模糊校正及热效率模糊自寻最优点控制
1
引言
燃煤工业锅炉是极其广泛的工业设备之一, 在世 界性矿物燃料价格上涨和供应紧张的情况下, 提高其 热效率是目前学者和专家极为关注的问题。 对锅炉燃烧系统的分析可知,热量损失的主 要原因是化学不完全燃烧和排烟。出现这两种情 况的原因分别为供煤量过多和供风量过多,这就 要求我们使空气和煤的混合要恰到好处,以实现 风煤的合理配 比,体现此合理配 比的参数是过剩 空气系数“:
Fuzzy Ad ustment of Variable 0 xygen Quantity and Thermal j Ef ciency Fuzzy 0 Ptimum Seeking Control f r Industry Boiler i f o
Dong De a f Liu C uan ia Z ao Mingshan h j h (Daqing Petroleum lnstitute, Daqing l 63318)
3.1 锅炉对象特性及厅 之间的关系 与仓
锅炉是一个多输入多输出系统,是难于建立数 学模型的,而且系统受环境干扰或遇到一些无法测 量的随机干扰因素,这就需要其系统本身在运行的
过 中“断 量 、“断 解 , 摸 当 系 程 不测 ” 不理 ”以清 时
统运行的条件及此时的最佳参数,以适应过程动态 的变化而修正控制动作,这就涉及到自 寻最优点控
50 一一般, NG一较差; 蒸汽负荷的论域: D= {2, 3, 4, 6 } : 相应的FUZZY 子集: 刀 5, ={VS, , B, 5 M,
文献翻译—二轴转台控制系统设计
附录1转台广泛应用十航空、航天、兵器、航海等领域,有各种不同的类型和用途。
本文所研究的二轴转台与可见光目标模拟器一起构成可见光目标模拟检测系统,用以完成导引头装前测试。
可见光目标模拟器模拟产生电视导引头在测试和试验过程中所需的各种目标,由二轴转台带动目标模拟器形成满足导引头要求的图像视场及目标运动特性,作为导引头测试的模拟目标。
可见,二轴转台控制系统设计的优劣对能否成功地完成导引头的性能测试和检验有重要的影响。
1.1转台控制算法概述本文所研究的二轴转台,包括方位轴和俯仰轴,每一轴的控制通常采用双闭环控制结构,即由内到外依次是速度环和位置环。
速度环的作用是提高系统的刚度来抑制系统的非线性及外部扰动,控制系统的精度由位置环来保证。
从控制律的类型来看,速度环通常采用pi控制,采用模拟方式实现。
种类繁多的控制算法多数在位置环实现。
其是转台控制系统的核心,是影响转台控制系统性能的关键因素。
从模拟控制系统开始,到数模混合控制系统及计算机控制系统的长期发展过程中,形成了许多行之有效的控制方法。
从它们的发展过程和应用特点出发,大体可分为二类:传统控制策略,现代控制策略和智能控制策略人工神经网络是人工智能的一个主要分支。
它是一些科学家从模仿人脑神经细胞的组成、结构及工作机理出发,提出的一套思想方法。
其目的在于研究一种新的理论,实现一种新的系统使之能够完成人脑的功能[[12,13]。
尽管在理论和应用方面还存在很多不足之处,但它的出现却给遇到挑战的自动控制带来了新的生机和曙光。
1.2模糊控制的发展从1965年美国著名控制论学者L. A. Zadeh发表开创性论文,首次提出一种完全不同十传统数学与控制理论的模糊集合理论以来,模糊集和模糊逻辑理论迅速发展,形成了一门完善的数学理论。
1974年E. H. Mamdani首次将模糊控制理论应用十蒸气机及锅炉的控制,取得了优十常规调节器的控制品质,从此,模糊控制诞生了。
模糊控制理论和技术变成智能控制领域最活跃的学科之一,受到广泛地重视和发展,并取得了有目共睹的成就。
彩色电视副载波校频及误差分析
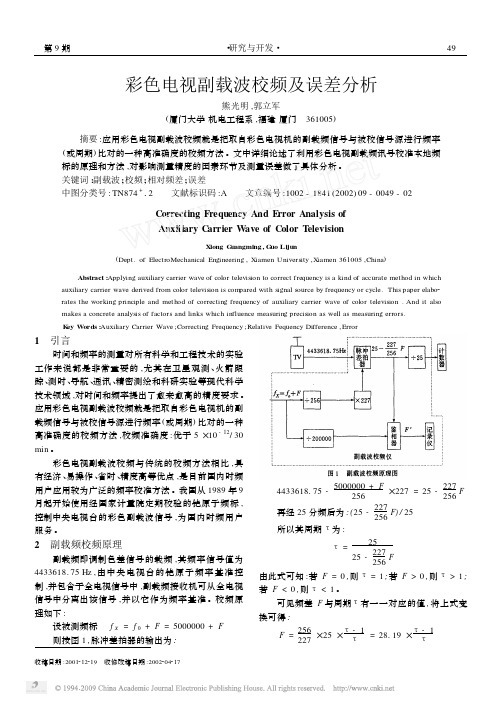
τ- 1 τ- 1 256 ×25 × τ = 28 . 19 × τ 227
50 28119 × 10 - 6
仪表技术与传感器 τ- 1 τ τ- 1 = τ ×5 . 64 × 5000000
311 铯原子频标相对国家基准的误差
2002 年
则相对频差 :
F f0
=
根据 JJ G349 - 84 检定规程的定义 ,频率准确度 :
业大学出版社 ,1996 :294 - 308.
[5 ] Goodwin , G. C : Adaptive filtering prediction and control [ M ] . New York Englewood cliffs NJ : Prentice Hall ,1984 :121 - 129.
参 考 文 献
dle speed control of internal combustion engines[J ] . Control Engineer2 ing Practice ,1999 ,7 (10) :1061 - 1069. [2 ] Li Wei ,Chang Xiaoguang. A neuro - fuzzy control for a stoker - fired boiler based on behavior modeling [J ] . Control Engineering Practice. 1999 ,7 (4) :469 - 481. [3] M. C Readman ,M. R Muldoon and L Reynolds :Control of free lengt h when coiling a helical spring [J ] . IEE proc - Control Theory Appl , 2001 ,148 (3) :239 - 244. [4 ] 李士勇 . 模糊控制 、 神经控制和智能控制论 [ M ] . 哈尔滨 : 哈尔滨工
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Fuzzy Control in BoilerAbstract: At present, there are many small and medium sized industrial and commercial boilers, most of them very low level of automation, there is incomplete combustion and exhaust high oxygen content, exhaust heat loss big issues such as a direct result of the low thermal efficiency of boiler and a lot of energy waste, but also a great pollution to the environment, so to achieve a computer-controlled boiler has an important significance. Siemens 300PLC for the Development platform, design of fuzzy self-tuning PID controller used in the industrial boiler control system of the boiler control system to overcome the inertia of large, non-linear characteristics, combined with PID control of steady-state characteristics of high accuracy, so that control systems are a good control effect. In the study of fuzzy control combined with the traditional PID control based on the targeted industrial boilers, designed a comprehensive and practical automatic control system.Keywords: fuzzy control; PID; self-tuning; boiler; PLCA control system for the program will be designed to the boiler drum water level control system as the main Research content of the boiler drum water level is to write papers in an important parameter, which reflects the amount of boiler steam generated, and to the dynamic balance between water relations, is an important condition for safe operation of the boiler. Drum water level high will the heating surface of superheater fouling have been burned; and drum water level is too low will destroy soft cycle, resulting in inadequate water supply waterwall tubes have been burned, even lead to a boiler explosion. Automatic boiler water level task is to control the water flow, to adapt them to changes in evaporation to maintain the drum water level at the permitted range. The fuzzy control algorithm is introduced into the system, the use of fuzzy control is easy to realize the complex control of the characteristics of the object, there will be experienced operator to control the Experience and expertise applied to the control process, manually control rules under the organizational control decision table,and then the decision by the table PID parameters of the output value, with the combination of the traditional PID control, according to the boiler drum water level occurred in the course of the different states and disturbances, on-line real-time pairs of PID parameter tuning, allowing the system to maintain proper operation of transient parameters, easy to maintain drum water level setting. Boiler water level control system for the characteristics of the steam flow from the feed-forward signal and the water flow to control signals, designed a three-impulse control systems. 1.1 The boiler drum water level of the three impulse control mode. Three-impulse drum water level control, steam flow rate as a feed-forward signal, the water flow as a control signal, composed of the three-impulse drum water level control system. 1.2 System hardware configuration. Controller is constituted by the PLC using Siemens 300PLC as development platform. Input-output system uses a distributed I / O (ET200M), through the input and output module will capture the signal sent to the scene to the PLC controller.Two fuzzy self-tuning PID controller design 2.1 design principles. Fuzzy self-tuning PID control algorithm is based on the PID algorithm to the amount of error e and error change ec as a fuzzy controller input in order to meet different e and ec the different requirements of the controller parameters, according to design of fuzzy PID synthesis reasoning parameters of fuzzy matrix. In the boiler drum water level control system, the input variables selected as drum water level deviation. Variation and deviation values of ec, the output variable selection for the PID parameters of the school is positive, that is △ kp,△ki, and △kdd. In the fuzzy self-tuning PID controller, using the two-dimensional fuzzy controller. 2.2 Fuzzy controller design process, system architecture constructed in four steps in 2.2.1, according to the system output to be sampled to calculate the system of choice of input variables. The work accomplished by this step is to determine the fuzzy controller input and output. 2.2.2 "fuzzy", ie the input volume or output of the fuzzy, through the factor and scale factor to quantify the exact amount of change in the scope of (basic theory of the domain) fuzzy fuzzy set theory into the domain range. We can use exactly the amount of "Chia", "middle", "negative in the" "negative small" and other vague language to be divided into several files. The relationshipbetween the size of these files we have used in the domain of fuzzy theory to represent the fuzzy sets. The fuzzy sets and membership functions of the size of the related membership function is usually used: triangular membership function, normal membership function and trapezoidal membership functions and so on. Different membership function represents the characteristics of different systems, we generally used a larger error in the system with a low-resolution of membership function, while the smaller error in the system used with a high-resolution of membership function. 2.2.3 Synthesis of fuzzy control table operation, with the first two steps of work, input and output of the fuzzy numbers, combined with operational experience or data, we can control the input volume and the amount of fuzzy numbers to arrange by the a series of if-then control rules consisting of a collection, using the rules of information, using minimax synthesis or other synthetic method, we can be controlled synthesis of the table. The control table stored in the Computer for the program check the output. 2.2.4 Query output and output precision, computer control program by querying the control table, which corresponds to a particular fuzzy number can be found in the control of the amount of input fuzzy numbers, and then through the output scale factor to convert the fuzzy output control for the amount of The precise amount of control output, which is in fact an output range, the find is considered one of the most representative, and can directly drive control unit controls the exact value of the output. 2.3 Fuzzy self-tuning PID control algorithm in the PLC programming. Fuzzy self-tuning PID control algorithm used in Siemens 300PLC statement on the table programmatically programming. Capture changes in the amount of error signal and error signal, its fuzzy variables in the domain of language, using off-line calculation method of the fuzzy look-up table of fuzzy rules are made, by way of online queries fuzzy control output, and finally PID parameter correction add value and reference value to obtain the instantaneous value of PID parameters, at last PID operation, calculate the amount to the control object to control the actuators. In the PLC, use the FB function blocks and data blocks DB to implement fuzzy control algorithms. First, a good off-line calculation of fuzzy relation look-up table, the scale factor values, errors and fuzzyrelationship between the upper and lower limits for R sent to the DB look-up table stored in data blocks. In the DB data block, the fuzzy relation R according to the dumping order emissions, that is, in order to input the first column, then enter the second column, third column, and then in FB function blocks to complete the calculation look-up table feature. It is noteworthy that, in the rounding will be used here E singleton fuzzifier, and then, from the fuzzy sets and fuzzy relations polaron wind derived fuzzy decision-making. In the process, the comparison instruction and the use of this part of the nested loop to complete. Finally, using the maximum membership degree method, derived from the fuzzy decision △ kp, △ ki, △ kd, further incremental PID output control the amount of computing too. Reposted elsewhere in the paper for free download3 Conclusion According to the characteristics of the boiler control system, analysis of the boiler drum water level control system control tasks and control objectives for industrial processes appeared nonlinear, large time delay, strong coupling, difficult to control the industrial boiler control object characteristics, In the traditional PID controller is difficult to achieve the desired control effect of the premise, combined with relatively rapid current development of fuzzy control theory, control theory and the use of fuzzy PID controller combined to transform the original ID control method, combined with PID control of the steady-state the advantages of high precision design of fuzzy self-tuning PID controller to achieve the PID parameters on-line self-tuning, allowing the system to maintain optimal transient parameters of the fuzzy control and PID control of combining organic and easy to achieve satisfactory control performance .References[1] Lee-friendly. Automatic Control Theory (third edition) [M]. Beijing, National Defense Industry Press, 2005.[2] Sun You-Xian, SHAO Hui-He. Industrial process control Technology(application of chapter X sperm) [M]. Beijing: Chemical Industry Press, 2006.[3] Cai Jianjun, etc.. Based on PLC and frequency control of the heating boiler control system design [J]. Instrumentation users, 2004 (2).[4] Liu Shuguang, Weijun Min, Zhi-Chao Zhu forward. Fuzzy controltechnology [M]. Beijing: China Textile Press, 2001.[5] Timothy J. Ross. Fuzzy Logic and Its Application[M]. Beijing: Electronic Industry Press, 2001.[6] Siemens (China) Co., Ltd., Siemens S7-300/400PLC programming software manual.[7] Feng Junkai, Shen Youting, Rui-Chang Yang. Boiler theory and computing (third edition) [M]. Beijing: Science Press, 2003. Reposted elsewhere in the paper for free download。