基于S7—200 PLC USS协议通信的速度闭环定位控制系统设计
西门子PLC的USS通信程序原来是这样编写,赶紧转发收藏!
西门子PLC的USS通信程序原来是这样编写,赶紧转发收藏!展开全文S7-200 SMART本体集成的RS 485 通信口可以工作在自由口模式下,支持 USS 通信协议。
S7-200 SMART 与驱动装置(变频器)进行 USS 通信时可以:1)根据驱动装置的具体USS 通信规范,我们自己编程实现USS 通信。
此方式可以保证该驱动装置的所有USS 通信功能都能得到使用;2)使用西门子提供的 USS 通信指令库,实现与 Micro Master 系列的 MM3/MM4 和 SINAMICS G110/V20 的USS 通信。
此指令库只能有限地支持与其他驱动装置的 USS 连接。
使用西门子提供的USS 指令库,这样我们就不必自己配置复杂的PKW/PZD 数据,或者计算校验字节。
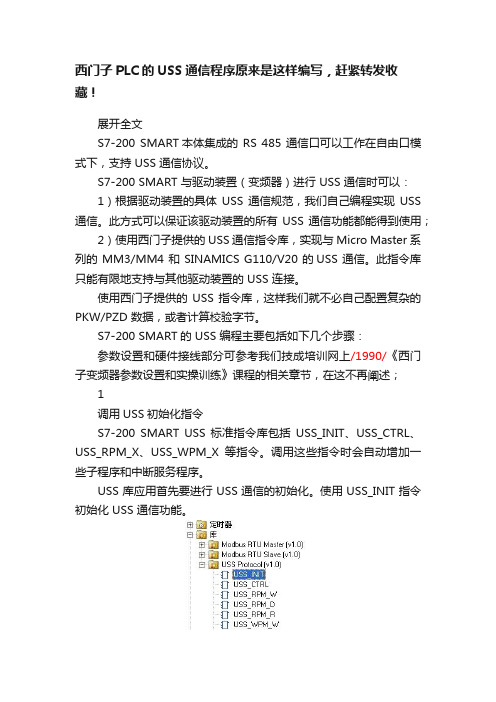
S7-200 SMART的 USS 编程主要包括如下几个步骤:参数设置和硬件接线部分可参考我们技成培训网上/1990/《西门子变频器参数设置和实操训练》课程的相关章节,在这不再阐述;1调用USS初始化指令S7-200 SMART USS 标准指令库包括USS_INIT、USS_CTRL、USS_RPM_X、USS_WPM_X等指令。
调用这些指令时会自动增加一些子程序和中断服务程序。
USS 库应用首先要进行 USS 通信的初始化。
使用 USS_INIT 指令初始化 USS 通信功能。
图 1. 选择 USS_INIT 指令打开 USS 指令库分支,像调用子程序一样调用 USS_INIT 指令。
图 2. 调用 USS_INIT 指令图中:EN:初始化程序USS_INIT 只需在程序中执行一个周期就能改变通信口的功能,以及进行其他一些必要的初始设置,因此可以使用SM0.1 或者沿触发的接点调用 USS_INIT 指令;Mode:模式选择,执行USS_INIT 时,Mode 的状态决定在通讯端口上是否使用 USS 通信功能;=1 设置为 USS 通信协议并进行相关初始化=0 恢复为 PPI 协议并禁用USS通信Baud:USS 通信波特率。
基于S7-200PLC步进电机调速控制(含全套CAD图纸)
基于S7-200PLC步进电机调速控制(含全套CAD图纸)设计毕业任务书论文一、题目及专题:1、题目基于S7-200PLC步进电机调速控制—步进驱动控制系统设计2、专题二、课题来源及选题依据本课题是设计基于S7-200PLC步进电机调速控制。
PLC是一种专门为在工业环境下应用而设计的数字运算操作的电子装置。
它采用可以编制程序的存储器~用来在其内部存储执行逻辑运算、顺序运算、计时、计数和算术运算等操作的指令~并能通过数字式或模拟式的输入和输出~控制各种类型的机械或生产过程。
随着计算机技术的发展~可编程逻辑控制器的功能不断扩展和完善~其功能远远超出了逻辑控制的范围~具有了PID、A/D、D/A、算术运算、数字量智能控制、监控、通信联网等多方面的功能~它已变成了实际意义上的一种工业控制计算机。
PLC作为简单化的计算机~以其通用性强、可靠性高、指令系统简单、编程简便易学、易于掌握、体积小、维修工作少、现场接口安装方便等一系列优点~在全世界广泛应用~为生产生活带来巨大效益方便。
三、本设计(论文或其他)应达到的要求:1、掌握步进电机的原理及其驱动方法。
2、掌握西门子S7-200 PLC的原理与程序设计方法。
3、掌握步进电机的电气控制试验系统的工作原理。
4、基于该系统设计S7-200 PLC程序。
四、接受任务学生:机械93 班姓名肖超五、开始及完成日期:自2012年11月12日至2013年5月25日六、设计(论文)指导(或顾问): 指导教师签名签名签名教研室主任学科组组长〔〕签名研究所所长系主任签名2012年11月12日摘要步进电动机具有快速起停、精确步进和定位等特点,所以常用作工业过程控制及仪器仪表,使用PLC可编程控制器实现步进电动机驱动,可使步进电动机的抗干扰能力强,可靠性高,同时,由于实现了模块化结构,是系统结构十分灵活,而且编程语言简短易学,便于掌握,可以进行在线修改,柔性好,体积小,维修方便。
本设计是利用PLC做进电动机的控制核心,用按钮开关的通断来实现对步进电机正,反转控制,而且正,反转切换无须经过停车步骤。
S7_200PLC程序的设计举例
S7_200PLC程序的设计举例S7-200是一款西门子公司推出的小型可编程逻辑控制器(PLC),广泛应用于工业自动化控制系统中。
它具有编程灵活、功能强大、性能稳定等特点,可用于控制各种设备和过程。
下面将通过一个具体的举例来说明S7-200PLC程序的设计思路和步骤。
假设我们要设计一个自动化控制系统,控制和监测一个简单的流水线加工过程。
该流水线有一个进料输送带、一个加工工位和一个出料输送带。
整个过程需要按照以下步骤进行控制:1)启动进料输送带;2)当物料到达加工工位时,启动加工工位;3)当物料加工完成后,停止加工工位并启动出料输送带;4)当物料离开出料输送带时,停止出料输送带。
首先,我们需要对整个流程进行拆分,确定各个步骤所对应的PLC程序。
按照上述步骤,我们可以将整个流程拆分为以下几个部分:进料输送带控制、加工工位控制、出料输送带控制。
接下来,我们逐一来设计每个部分的PLC程序。
1.进料输送带控制:我们需要一个输入信号来检测物料是否到达起始位置,可以使用一个光电开关来实现。
建立一个标记位用于记录物料是否到达起始位置,当光电开关感应到物料时,标记位置为1;当物料离开起始位置时,标记位置为0。
此外,我们还需要一个输出信号来控制输送带的启停,设为Q0.0。
进料输送带的PLC程序可以如下设计:-PLC程序设计-I:1.0/0---,-----+当输入I:1.0/0检测到物料到达起始位置时,输出O:0.0/0为1,启动输送带;当检测到物料离开起始位置时,输出O:0.0/0为0,停止输送带。
2.加工工位控制:加工工位需要一个输入信号来检测物料是否到达工位,同样可以使用光电开关来实现。
建立一个标记位用于记录物料是否到达工位,当光电开关感应到物料时,标记位置为1;当物料离开工位时,标记位置为0。
此外,我们还需要一个输出信号来控制工位的启停,设为Q0.1、加工工位的PLC程序可以如下设计:-PLC程序设计-I:1.0/1---,-----+O:0.1/0---+-----+-()当输入I:1.0/1检测到物料到达工位时,输出O:0.1/0为1,启动工位;当检测到物料离开工位时,输出O:0.1/0为0,停止工位。
USS协议在变频器与S7_200PLC通信系统中的应用
深 至 0.04m m ~ 0.045m m, 而 上 胶 区 其 它 区 域 深 度 保 持 在 0.025m m ~ 0.030m m,以减少切纸鼓轮、搓板、搓轮、切刀轮清理次
[参考文献]
[1] 德国 HAUNI 公司.PR OTOS70 机械操作手册.
数。
图 4 改进后的控胶辊
4 效果验证 改进后,ZJ 17 卷接机组生产低焦油卷烟牌号时,在成品烟支满足 质量符合控制标准的前提下,设备可以稳定运行于 7000 支 / 分,即机 组可以全速生产,有效作业率也由改进前 46.75% 提高到改进后的 9 2.3 3% 以上。 另外,由于烟支卷制质量稳定,与改进前相比较,一套卷接机组可 节省一个劳动力,而且机台操作工和维修工的劳动强度明显下降,且卷 接机组和包装机组可以连机生产。
PKW 域:参数值域,由参数识别码、子参数号和参数值构成,参
P2258=1.0 s PID 设定值斜坡上升时间
数个数根据设备的定义最大可有 124 个字;
P2291=100% PID 输出上限
PZD域:过程控制数据域,包括控制字 / 状态字,设定值 / 实际值多可有 16 个字符;
应用科技
USS 协议在变频器与 S7- 200 PLC 通信系统中的应用
李敏
(青岛科技大学,山东青岛 266000)
ÄÁÁÂÃÂÇÄÅÆÇÄÈÉÁÈÂÉÃÆÄÄÁÃÇÁÄÄÁÅÆÄÄ [摘要]西门子S7-200和MicroMaster变频器之间采用通讯协议USS,用户可通过程序调用的方式实现通信,编程的工作量小,是一种
[1] 西门子公司.MM440 标准变频器使用大全,2007.
粗纱机中 4 台电机分别传动牵伸罗拉、锭翼、筒管和龙筋升降,
[2] 西门子公司.S7- 200 可编程控制器系统手册,2005.
基于西门子S7-200PLC的USS通信软件设计
支持 U S S 通信协议。 这是 因为 s —0P C的 自由口 720 L 模式的( 硬件 ) 字符传输格式 , 以定义为 U S 可 S 通信
对 象所需 要 的模式 , 因而可 以实 现 s .0 驱动装 720和
( )简单可靠 的报文格式 , 4 使数据传输灵活高
效; ( ) 易实现 , 5容 成本 较低 。
参数; @P m: WE 参数值数据 ;
.
基
于
⑤P D:此 区域用于在主站和从站之间传递控 z 参数按设定好舳
西
门
c) ,
I
子
连 续 的 字 符 帧 组 成 US S报 文 。 在 一 条 报 文 中 , 符 帧之 间 的问 隔延 时要 小 于两 个 字符 帧 的传 字
置之间的 U S通信控制 ,其 中 s — 0C U将 在 S 72 P 0
US S通信 中作为 主站 。
1 S U S通信协 议简 介
U S的工作机制是 , S 通信总是 由主站发起 , S US
主站 不断 循环轮 询各个 从站 ; 站根据 收 到 的指令 , 从
US ( iesl eil tr c, 通用 串行 通 信 SUnvra Sr ef e即 aI a n
文献标 识码 : A
文章 编号 :6 14 9 一 0 2 10 5 .3 17 .7 2( 1 ).1 60 2
Ab ta t T i a t l a e M 4 0 c n et rwi 7 2 0 b t e S c mmu i ai n a n e a l , n s r c : h s r c et k sM i 4 o v re t S — 0 ewe n US o h n c t s a x mp e i - o to u e eUS rv e i ec n r l u c i nb o k d sg f o w a ei ea l r d c st S d i ed v c o t n t l c e i n o f r d t i h o f o st n .
基于PLC的中央空调温度控制系统设计设计

摘要中央空调已经广泛应用于商用与民用建筑中,用于保持整栋建筑温度恒定。
传统的设计中,无论季节、昼夜和用户负荷的怎样变化,各电机都长期固定在工频状态下全速运行,所以会造成极大的的能源浪费。
本设计采用变频器、PLC、温度传感器等器件的有机结合,构成温差闭环自动控制系统,自动调节水泵的输出流量达到节能目的。
该系统采用西门子的S7—200PLC作为主控制单元,利用传统 PID 控制算法,通过西门子 MM440 变频器控制水泵运转速度,保证系统根据实际负荷的情况调整流量,实现恒温控制,从而最大程度的解决能源浪费问题。
本设计通过采用基于 USS 协议的RS-485总线通讯的网络,通过西门子TD200文本显示器实现人机界面的设计,使用 MCGS 工控组态软件,对系统进行理论分析。
通过分析该设计,验证了该设计的可靠性,可以解决中央空调的能源浪费问题。
关键词:中央空调,PLC,PID,变频器ABSTRACTThe central air conditioning has been widely used in commercial and civil buildings, which are used to maintain constant temperature of the building. In traditional design, regardless of the season, day and night, and how the user load changes, the motor is fixed to run at full speed for a long time in the condition of power frequency. It will cause great waste of energy.This design is developed based on the combination of frequency converter, PLC, temperature sensor. It makes up a temperature difference closed-loop automatic control system and automatically adjust the output flow of pump to achieve energy saving. The system adopts the Siemens S7-200 PLC as the main control unit, using the traditional PID to control algorithm, using Siemens MM440 inverter to control of pump speed, to guarantee system adjust load flow according to actual situation. All of these will bring out constant temperature control, so as to solve the problem of energy waste to a great extent.This design use RS - 485 bus communication networks which is based on USS protocol and using the Siemens TD200 to realize the human-computer interface design, and using the software made from MCGS, to carries on the theoretical analysis to the system. Verified the reliability of the design, the design can solve the problem of central air conditioning energy waste through the analysis of the design.KEY WORDS: The central air conditioning, PLC, PID, frequency converter目录摘要 (I)ABSTRACT (II)第1章绪论 (1)1.1 中央空调的发展 (1)1.1.1 中央空调现在状况 (1)1.1.2 中央空调发展趋势 (1)1.2 本设计的意义 (1)1.2.1 设计的主要内容 (1)1.2.2 设计的意义 (2)第2章中央空调系统介绍 (3)2.1 中央空调结构 (3)2.1.1 中央空调概述 (3)2.1.2 中央空调结构 (3)2.2 中央空调系统工作原理 (4)2.2.1 制冷原理 (4)2.2.2 工作原理 (4)2.2.3 中央空调的控制原理 (4)2.3 中央空调的评价 (5)2.4 本章小结 (5)第3章中央空调控制系统的硬件设计 (6)3.1 变频器 (6)3.1.1 变频器的介绍 (6)3.1.2 变频调速的原理 (6)3.1.3 变频器的选择 (9)3.1.4 使用注意的问题 (10)3.2 电机的软启动原理及应用 (11)3.2.1 软启动的介绍 (11)3.2.2 软启动工作原理 (11)3.2.3 软启动的优点 (11)3.2.4 软启动与变频器的对比 (12)3.3 PLC选型 (12)3.3.1 PLC的工作原理 (12)3.3.2 西门子S7—200介绍 (13)3.4 温度传感器 (14)3.5 温度变送器 (15)3.6 人机界面选型方案 (15)3.7 总体硬件设计 (16)3.8 本章小结 (18)第4章软件设计 (20)4.1 PID控制 (20)4.1.1 PID控制简介 (20)4.1.2 PID参数整定 (20)4.1.3 对中央空调的PID控制 (21)4.2 应用软件STEP7 (21)4.3 plc编程 (22)4.3.1 程序流程图 (22)4.3.2 中央空调控制系统的I/O分配表 (24)4.3.3 程序中使用的存储器及其功能 (25)4.3.4 中央空调温度控制系统程序 (25)4.4 设备通讯 (26)4.4.1 RS-485介绍 (26)4.4.2 USS协议软件与S7—200间的通讯 (26)4.5 MCGS组态软件 (27)4.5.1 MCGS组态软件简介 (27)4.5.1 MCGS组态画面 (27)4.6 本章小结 (29)第5章结论 (30)致谢 (31)参考文献 (32)附录 (33)第1章绪论1.1 中央空调的发展1.1.1 中央空调现在状况中央空调行业现在存在着巨大的竞争,这种竞争是产品革新所产生的,产品革新主要围绕低碳环保进行,低碳环保在这个时代有着很重大的意义。
基于VSS通信方式的变频调速系统设计

摘要PLC和变频器是工厂实现远程控制,提高生产效率的重要硬件。
采用PLC的优点就在于PLC的程序编制过程不是很复杂。
而组态软件又使得工厂在生产过程中能够远程监控设备的运行,能够及时有效的处理突发事件。
组态王控制功能强大,界面创建简单,编写程序方便,有利于初学者使用。
本次设计是在熟悉KING VIEW 组态王、S7-200编程软件、西门子MM420变频器、以及USS通信协议的基础上完成的。
本文主要体现了,PLC与变频器之间利用USS协议连接起来,共同控制电动机调速,最终要实现的是利用组态王的监控界面可以改变PLC的打开/闭合,能够监控电机的运转画面。
文中重点介绍了组态王界面的制作及参数的设置、USS协议的应用、PLC程序的编写过程及参数设置、变频器的参数设置、PLC 与变频器的通信等。
关键词:PLC;变频器;USS通信协议;组态王AbstractPLC and transducer is important hardware which realizes long control and improve the yield in the factory. PLC’S merits consist that weaving PLC’S programs aren’t very hard. King view make the factory can watch and control the running facilities between the producing processes, also deal with matters which break out in season. The king view has powerful control function, it settees up interfaces very easy, it writes programs easy, and it is propitious to using for novice.In this design is completed on the bases of knowing KING VIEW, s7-200 programming software, SIEMENSE MM420, transducer and USS communication protocol. This essay mainly materializes that PLC linked up with transducer, making use of USS communication protocol. They controlled the speed of electromotor. Finally we well realized the interface of king view and can change PLC’s on/off, and then we can supervise and control the working menu of electromotor. In this essay, I introduce the facture of king view and the parameter’s setting of king view, the application of USS protocol, the writing process of the PLC’s program and parameter setting, the parameter setting of transducer, communication between PLC and transducer, etc.Keywords: PLC; transducer; USS communicating protocol; king view目录1 引言 (1)1.1课题背景及设计研究方向 (1)1.1.1 课题背景 (1)1.1.2 设计研究方向 (2)2 PLC可编程控制器 (3)2.1 可编程控制器梯形图编程规则 (3)2.1.1 编程的几个步骤 (3)2.2 S7—200的通信方式与通信参数的设置 (4)2.2.1 S7-200的通信方式 (4)2.2.2 S7-200通信的硬件选择 (4)2.2.3 网络部件 (5)2.2.4 使用PC/PPI电缆通信 (6)2.2.5 计算机使用的通信接口参数的设置 (7)2.3 S7-200的网络通信协议 (7)2.3.1 点对点接口协议 (7)2.3.2 多点接口协议(MPI) (8)3 变频器 (9)3.1 变频器介绍 (9)3.1.1 变频器面版图 (9)3.1.2 快速调试 (10)3.1.3 控制端子 (12)4 通信协议介绍 (13)4.1 USS通信协议 (13)4.1.1 USS协议的网络结构 (13)4.2 采用通用的串行接口协议 (14)4.2.1 通讯报文的结构 (14)4.2.2 USS协议有关信息的详细说明 (15)4.2.3 USS的物理连接 (17)4.3 MICROMASTER4 有关USS 通讯的参数设置 (18)4.3.1 基本设定 (18)4.4 USS库中指令介绍 (19)4.4.1 USS_INIT指令 (19)4.4.2 USS_CTRL指令 (20)4.4.3 USS_RPM_x指令 (22)4.4.4 USS_WPM_x指令 (23)5 KING VIEW组态软件介绍 (25)5.1 组态软件的概述 (25)5.2 制作一个工程的一般过程 (25)5.2.1 建立组态新工程 (26)5.2.2 创建组态画面 (28)5.2.3 定义I/O设备 (31)6 设计过程及设备调试 (35)6.1 PLC与变频器通信设置 (35)6.1.1 PLC软件应用及参数设置 (35)6.1.2 变频器通信参数设置 (40)6.2 电机调试过程 (41)结论 (42)致谢 (43)参考文献 (44)附录A (45)附录B (50)1 引言1.1课题背景及设计研究方向1.1.1课题背景在工业控制自动化领域的发展过程中,手工操作的进行工业生产的设备已经逐渐被淘汰,取而代之的是利用先进的设备及软件系统实现远程控制,这样一来,工人不用在车间工作,减少了不小的危险性,更重要的是先进设备及软件系统的引用使得生产过程简单化,生产车间标准化,生产效率大大提高,控制性能大大加强。
基于S7-200PLCUSS协议通信的速度闭环定位控制系统设计
鼷霭擎蟊 蕊堕 腻
豫麓糍 黪 = = = = =
= = = = = == =二 = = 二 二 = == : = = = :
蔓三 妻r_
_
l L 龟 [
誊 器 ≯ | 巷 。 蓦 拼 麓 t 棼 端 谨 i 嚣 搿 簿 辨 掰 薅 i l 搿 帮 | I 蹦 曩 誊 岛 0
P 1 l 3 5 P 1 2 3 2 P 1 2 3 3 5 . 0 1 0 0 0
C O M 链 路 的U S S ) 0 停 止 时 间 1 5 O 直 流 制 动 电 流 1 直流制动电流持续时间
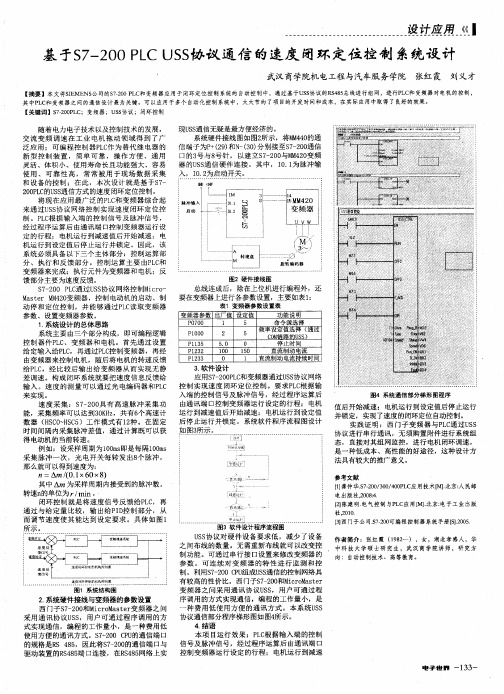
3 . 软件设计 应用s 7 — 2 0 0 P L C  ̄变频器通过U S S 协议网络 控制 实现速度 闭环定位控 制 。要求P L C 根 据输 入端 的控 制信号及脉冲 信号 ,经过程 序运算后 图4 系统 通信部分梯形 图程序 由通讯端 口控制变频器 运行设定 的行 程; 电机 值后 开始减速 ;电机 运行到设定值后停 止运 行 运行到减 速值后开始减 速; 电机运 行到设定值 并锁定 ,实现 了速度 的闭环定位 自动控制 。 后停止运 行并锁定 。系统软件程序流 程图设计 实践 证 明:西 门子 变频 器与P L C 通过 U S S 如 图3 所示 。 协议 进行串行通讯 ,无须购置附件进行 系统组 …………………… 囊 ………………………………一 . ¨ 态 ,直接对其组 网监 控,进行 电机 闭环 调速 , 是一种低成本 、高性 能的好途径 ,这种 设计 方 法具有较大 的推广 意义。 一………………
…
…
…
…
鳗 廛 一 I
基 于S 7 — 2 0 0 P L C U S S 协议 通 信 的速 度 闭环 定 位 控 制 系统设 计
USS通讯的定义、作用、结构及使用过程图文详解
USS通讯的定义、作用、结构及使用过程图文详解
主要内容:
S7-200 PLC USS通讯概述
S7-200 PLC USS通讯指令
S7-200 PLC USS通讯常问问题
(1)USS通讯S7-200 PLC 的USS通讯主要用于PLC与西门子系列变频器之间的通讯:PLC与驱动装置连接配合,主要实现的任务是:
控制驱动装置的启动、停止等运行状态
控制驱动装置的转速等参数
获取驱动装置的状态和参数
USS协议的基本特点如下:
支持多点通信(因而可以应用在RS 485等网络上)
一个网络上最多可以有32个节点(最多31个从站)
获取驱动装置的状态和参数
USS支持的通讯对象目前包括:
Micromaster 3/Micromaster 4系列
SINAMICS G110
MaterDrive 6SE70/6RA70
(2)USS通讯规约S7-200的USS通讯
USS的字符帧格式:
字符帧格式包括1个起始位,8位数据位,1位偶校验位和1位停止位。
USS的报文帧格式:
报文帧格式中起始字符固定为02H,1个字节的报文长度,之后是数据区,最后付上一个字节的BCC校验。
上表中间的净数据区由PKW区和PZD区组成:。
利用USS通讯协议完成S7-200对MM420变频器的控制
如 果干扰 比较严 重, 可 以采用屏蔽双绞线 , 也可以采 f P L C 1 和最多3 1 个从 站( 变频器 ) , 总站上 的每 一个从 站都 即可 , 用 P r o i f b u s — D P电缆 , 在采用屏蔽双绞线作为通信 电缆 时, 有唯 一 的标识码 ( 即站地址 , 在从 站参数 中设定 ) , 主站依 在互连 电缆 中 靠 标 识 码 识 别 各个 从 站 , 每个 从 站 也 可 以 对 主 站 发 来 的信 把具 有不同 电位参 考点的设备连接在一起 , 会 产 生 不应 有 的 电流 , 从 而 造 成 通 信 口 的损 坏 。 所 以 为 了 息 报 文做 出 响应 并 回 应报 文 , 从 站 与从 站 之 间 不 能 直 接 进
摘要 :本文通过对 U S S通信协议 的介 绍, 利用 P L C通过 U S S协议完成对 西门子 变频 器 MM4 2 0的启动与停止 , 也可以通过相应 的指令完成对变频器参数 的写入与读取 。
Ab s t r a c t :B a s e d o n t h e i n t r o d u c t i o n o f U S S c o mmu n i c a t i o n p r o t o c o l , u s i n g P L C a n d t h r o u g h t h e US S p r o t o c o l t o c o mp l e t e t h e s t a r t a n d s t o p o f S i e me n s i n v e r t e r MM4 2 0 . c o mp l e t e t } l e w r i t e a n d r e a d o f f r e q u e n c y i n v e t r e r p a r a me t e r t h r o u g h he t c o r r e s p o n d i n g i n s t r u c t i o n s .
基于S7—200PLC的伺服电机位置控制系统
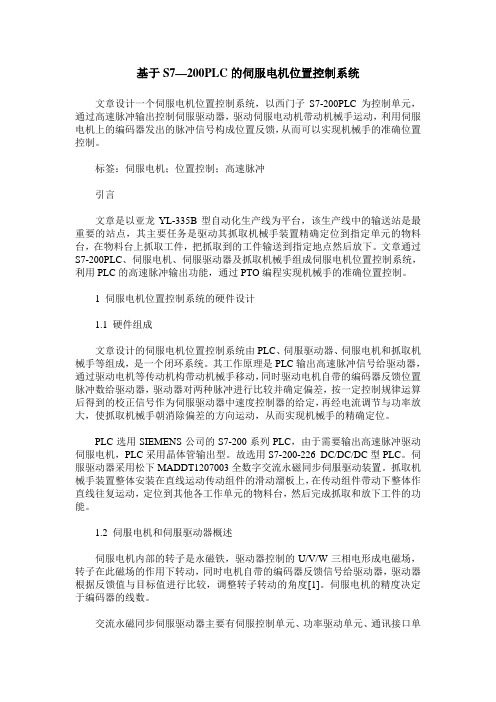
基于S7—200PLC的伺服电机位置控制系统文章设计一个伺服电机位置控制系统,以西门子S7-200PLC为控制单元,通过高速脉冲输出控制伺服驱动器,驱动伺服电动机带动机械手运动,利用伺服电机上的编码器发出的脉冲信号构成位置反馈,从而可以实现机械手的准确位置控制。
标签:伺服电机;位置控制;高速脉冲引言文章是以亚龙YL-335B型自动化生产线为平台,该生产线中的输送站是最重要的站点,其主要任务是驱动其抓取机械手装置精确定位到指定单元的物料台,在物料台上抓取工件,把抓取到的工件输送到指定地点然后放下。
文章通过S7-200PLC、伺服电机、伺服驱动器及抓取机械手组成伺服电机位置控制系统,利用PLC的高速脉冲输出功能,通过PTO编程实现机械手的准确位置控制。
1 伺服电机位置控制系统的硬件设计1.1 硬件组成文章设计的伺服电机位置控制系统由PLC、伺服驱动器、伺服电机和抓取机械手等组成,是一个闭环系统。
其工作原理是PLC输出高速脉冲信号给驱动器,通过驱动电机等传动机构带动机械手移动,同时驱动电机自带的编码器反馈位置脉冲数给驱动器,驱动器对两种脉冲进行比较并确定偏差,按一定控制规律运算后得到的校正信号作为伺服驱动器中速度控制器的给定,再经电流调节与功率放大,使抓取机械手朝消除偏差的方向运动,从而实现机械手的精确定位。
PLC选用SIEMENS公司的S7-200系列PLC,由于需要输出高速脉冲驱动伺服电机,PLC采用晶体管输出型。
故选用S7-200-226 DC/DC/DC型PLC。
伺服驱动器采用松下MADDT1207003全数字交流永磁同步伺服驱动装置。
抓取机械手装置整体安装在直线运动传动组件的滑动溜板上,在传动组件带动下整体作直线往复运动,定位到其他各工作单元的物料台,然后完成抓取和放下工件的功能。
1.2 伺服电机和伺服驱动器概述伺服电机内部的转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度[1]。
西门子S7-200使用USS协议指令和变频器通信

使用 USS 协议指令和变频器通信本章描述能使 S7-200 控制 MicroMaster 变频器的标准 USS 协议指令STEP 7-Micro/WIN 32 软件工具包通过专为 USS 协议通信而设计的预配置子程序和中断程序这些程序在STEP 7-Micro/WIN 指令树的库文件夹中作为指令出现的当你选择 USS 协议指令时而不需编程者的参与11.1 USS 协议指令的要求USS 协议指令需要能提供以下资源的 CPU端口 0: 当端口 0 用于 USS 协议通信时包括与 STEP 7-lMicro/WIN 的通信一旦端口 0分配给 USS 使用或将MODE开关置于在 STOPÍ£Ö¹Óë±äƵÆ÷µÄͨÐŻᵼÖ±äƵÆ÷Í£Ö¹¹¤×÷¿ª·¢ÕßÓ¦ÓÃÒ»¸öCPU 226 或EM 277 PROFIBUS –DP与 PC 中的一个 PROFIBUS CP 卡一起使用这样做能提供第二个通信端口在端口0上都会受USS协议指令的影响l除了被每个指令占用的空间外V存储器l一个从用户分配的存储单元开始的16字节通信建议为USS协议指令的每个实例分配一个唯一的缓冲区全局符号表配置当为第一个符号输入一个地址后图11-1表示符号表的USS标记起始的V区地址图11-1 符号表配置变频器通信时间与变频器的通信完成一个变频器通信事务通常需要几次 CPU 扫描波特率表11-1表示通信处理时间CPU有规律地按表11-1中的时间间隔轮询所有有效的变频器表11-1 变频器能信时间波特率轮询有效变频器的间隔时间 1200 *变频器数2400 *变频器数4800 *变频器数9600 *变频器数19200 *变频器数约束一次只能启动一个READ_PM或WRITE_PM指令每个指令的Done输出应发出输出完成的信号11.2 编程顺序使用 USS 协议指令的编程顺序如下只能通过一次扫描调用USS_INIT以启动或改变 USS 通信参数见11-4页所有其它地址都是自动地分配的选择图11-1中的USS标签即可看到相关的符号表可以任意添加 READ_PM 和 WRITE_PM 指令4. 配置变频器参数参阅 11.5 节中的非常重要的是均需用一根短注意有不同参数电位的设备互连会在互连电缆中流通不希望有的电流要确实保证或是共用一个公共电路参考点以防止不希望有的电流流通用隔离电路的接地和电路参考点屏蔽线必须连接到机箱接地点或9针连接器的插针 1注如不能读出 USS 指令块上的所有变量然后增加栏的宽度即可11.3 USS 协议指令USS_INITUSS_INIT 指令用于允许和初始化或禁止 MicroMaster 变频器通信必须先执行 USS_INIT 指令且没有错误返回完成位立即置位当 EN 输入为接通时每一次要改变通信状态因此一旦 USS 协议已启动必须通过执行一个新的 USS_INIT 指令以禁止 USS 协议1 将端口 0 分配给 USS 协议和允许该协议BAUD 设定波特率在 12004800或 19200ÓÐЩ±äƵÆ÷Ö»Ö§³ÖµØÖ· 0 至 30±ê¼ÇΪ ACTIVE 的任何变频器都是自动地在后台进行轮询控制的并防止变频器的串行链路超时计算状态轮询之间的时间参数11.5节D r i v e 0 激活位驱动器未激活驱动器激活D r i v e 1 激活位 驱动器未激活 驱动器激活图 11-2 激活变频器的描述和格式当 USS_INIT 指令完成时ERR 输出字节包含指令执行的结果表11-2 表示 USS 子程序的操作数和数据类型D0 Drive 0 激活位 驱动器未激活 驱动器激活D1 Drive 1 激活位 驱动器未激活 驱动器激活图 11-3 表示如何使用 LAD图 11-3 在 USS_INIT 子程序中使用 LADDRV_CTRLDRV_CRTL 指令用于控制 ACTIVE MicroMaster 变频器缓冲区中的命令发送到编址的变频器每个变频器只应有一个 DRV_ CTRL 指令以启动 DRV_CRTL 指令这个指令总是在允许状态RUN/STOP10当RUN位是接通时以便开始以规定的速度和方向运动必须具备以下条件OFF1 和 OFF2必须设定为 0lÔò·¢ËÍ MicroMaster 变频器一个命令OFF2 位用来使 MicroMaster 变频器减速到停止F_ACKλÓÃÀ´È·ÈÏÒ»¸ö¹ÊÕϱäƵÆ÷Çå³ý¹ÊÕÏ方向0-逆时针方向变频器地址有效地址为 0 至 31SPD_SPÊÇÈ«ËٶȰٷÖÖµµÄ±äƵËÙ¶È注每台变频器只能分配一个 DRV_CTR 指令对所有激活的变频器轮询最新的变频状态信息RSP_R 位接通进行一次扫描ERR 是一个错误状态字节11-16 页上的表 11-6定义指令执行中可能会出现的错误图11-4表示标准状态字和主反馈的状态位-200.0% 至 200.0%注有些变频器只报告正值的速度变频器仍报告正值的速度方向RUN_EN ָʾ±äƵÆ÷ÕýÔÚÔËÐÐ或已停止0-逆时针方向0-不禁止FAULT 位必须断开OFF2 FAULT 指示故障位的状态1-故障变频器显示故障代码参阅变频器使用手册要清除 FAULT 位并接通 F_ACK 位准备好启动 准备好运行 允许运行 存在驱动器故障 当前是滑行停止命令 当前是快速停止命令 禁止接通有驱动器的警告信息 没有使用1允许串联运行锁定串联运行一只能本地操作 频率已达到 频率没有达到 变频器输出是顺时钟 变频器输出是逆时钟留作将来之用这个位不一定总是为留作将来之用这个位不一定总是为留作将来之用这个位不一定总是为低字节高字节图 11-4 标准状态字和主要反馈的状态位表 11-3 DRV_CTRL 子程序的操作数和数据类型输入/输出操作数数据类型RUN I, Q, M, S, SM, T, C, V, L, 功率流布尔数OFF2 I, Q, M, S, SM, T, C, V, L, 功率流布尔数OFF3 I, Q, M, S, SM, T, C, V, L, 功率流布尔数F_ACK I, Q, M, S, SM, T, C, V, L, 功率流布尔数DIR I, Q, M, S, SM, T, C, V, L, 功率流布尔数DRIVE VB, IB, QB, MB, SB, SMB, LB, AC, 常数, *VD, *AC, *LD 字节SPD_SP VD, ID, QD, MD, SD, SMD, LD, AC, *VD, *AC, *LD, 常数实数RSP_R I, Q, M, S, SM, T, C, V, L 布尔数ERR VB, IB, QB, MB, SB, SMB, LB, AC, *VD, *AC, *LD 字节STATUS VW, T, C, IW, QW, SW, MW, SMW, LW, AC, AQW, *VD, *AC, *LD 字SPEED VD, ID, QD, MD, SD, SMD, LD, AC, *VD, *AC, *LD 实数RUN_EN I, Q, M, S, SM, T, C, V, L 布尔数DIR_CW I, Q, M, S, SM, T, C, V, L 布尔数INHIBIT I, Q, M, S, SM, T, C, V, L 布尔数FAULT I, Q, M, S, SM, T, C, V, L 布尔数图 11-5 说明如何使用 LAD网络2 变频器 0 的控制块图 11-5 在 DRV_CTRL 子程序中使用LADREAD_PMREAD_PM 指令读取变频器参数则完成READ_PM 指令的处理逻辑扫描仍继续进行这个位应保持接通一直到 DONE 位被置位才标志着整个处理结束每一次扫描READ_PM发送请求到变频器XMT_REQ的输入端必须与脉冲边缘检测语句相联接都会向变频器发出请求DRIVE input READ_PM命令将被发送到这个地址PARM 是参数号必须将 16 字节缓冲区的地址提供给 DB_PTR输入READ_PM 指令完成时第11-16 页上的表 11-6定义在执行指令时有可能出现的错误类型注在同一时间内表 11-4 READ_PM 子指令的操作数和数据类型表 11-4 READ_PM 子程序中的操作数和数据类型输入/输出操作数数据类型XMT_REQ I, Q, M, S, SM, T, C, V, L, 通过上升沿跳变检测指令触发布尔数DRIVE VB, IB, QB, MB, SB, SMB, LB, AC, 常数, *VD, *AC, *LD 字节PARM VW, IW, QW, MW, SW, SMW, LW, T, C, AIW, 常数, AC *VD, *AC,字*LDDB_PTR &VB 双字DONE I, Q, M, S, SM, T, C, V, L 布尔数表 11-14 用于 READ_PM 子程序的操作数和数据类型输入/输出操作数数据类型ERR VB, IB, QB, MB, SB, SMB, LB, AC. *VD, *AC, *LD 字节VAL VW, T, C, IW, QW, SW, MW, SMW, LW, AC, AQW, *VD, *AC, *LD 字图 11-6 说明如何使用 LAD图 11-6 在 READ_PM 子程序中使用 LAD 这两个触点必须是同一个触点这两个触点必须是同一个触点这两个触点必须是同一个触点WRITE_PMWRITE_PM 指令将变频器参数写入到指定的位置则完成WRITE_PM指令处理逻辑扫描仍继续进行这个位应保持接通一直到DONE 位被设置表明已完成了处理每一次扫描因此使得EN输入端每次上升沿到来时变频器输入是MicroMaster变频器的地址每个变频器的有效地址为 0 到 31VAL 是要写入的参数值WRITE_PM 指令使用这个缓冲区以存储向变频器所发出命令的结果DONE 输出接通和 ERR 的输出字节包含有执行这个指令的结果注在一个时间内注意当使用 WRITE_PM 指令来更新保持在变频器 EEPROM 中的参数集时约为 50,000次读周期的数量没有限制则首先必须设置 P971Ϊ 0图 11-7 说明如何使用 LAD图 11-7 在WRITE_PM 子程序中使用 LAD 这两个触点必须是同一个触点这两个触点必须是同一个触点这两个触点必须是同一个触点表 11-6 在 USS 指令中出现的执行错误出错号说明0 没有出错1 变频器不能响应2 检测到变频器响应中包含加和校验错误3 检测到变频器响应中包含奇偶校验错误4 由用户程序干扰引起的错误5 企图执行非法命令6 提供非法的变频器地址7 没有为 USS 协议设置通信口8 通信口正忙于处理指令9 输入的变频器速率超出范围10 变频器响应的长度不正确11 变频器响应的第一个字符不正确12 变频器响应的长度字符不正确13 变频器错误响应14 提供的 DB_PTR 地址不正确15 提供的参数号不正确16 所选择的协议无效17 USS 激活变频器没有激活20 在变频器中响应中的参数或数值有误11.4 变频器连接可用标准的 PROFIBUS 电缆和连接器将 CPU 连接到 MicroMaster 变频器网络连接器互连电缆正确的偏置和终接 注意把具有不同电位参考点的设备互连会在互连电缆中产生不应有的电流要确实保证通信电缆连接的所有设备或是相互隔离的见 2.3 节中的建议将 MicroMaster 变频器上的端子 2-0V连接到机箱接地点开关位置=O n 有终端和偏置开关位置=O ff 无终端和偏置开关位置=O n 有终端和偏置开关位置=O n 有终端和偏置开关位置=O ff 没有终端和偏置电缆屏蔽层电缆屏蔽层插针号插针号网络连接器网络连接器互连电缆电缆屏蔽层网络连接器有编程端口的网络连接器电缆的两个末端必须有终端匹配和偏置裸屏蔽层所有位置必须连接金属导槽11.5 变频器的设置将变频器连接到 PLC 之前变频器已有以下的系统参数按以下步骤设定变频器参数可选的按 P 键按向上或向下箭头键按 P 键P944=12. 允许读/写所有参数按向上或向下箭头键按 P键P009=33. 检查变频器的电动机设定值按 P 键直到显示器显示电动机的设定值为止输入参数HzRPMAVKW/HP°´ P 键直到显示器显示 P910ÊäÈë²ÎÊý°´ P 键直到显示出P092ÊäÈë²ÎÊýÖ±µ½ÏÔʾÆ÷ÏÔʾ³öÓëÄãµÄ RS-485 串行接口相对应的波特率数字为止输入参数1200波特2400波特4800波特9600波特缺省值19200波特每个变频器可经过总线运行按向上或向下箭头键按 P 键按向上或向下箭头键按 P 键输入可选的这是以秒表示的电动机加速到最大频率所需的时间按向上或向下箭头键按 P 键按向上或向下箭头键直到显示器出现所需要的增速时间为止输入参数8. 斜坡减速时间按 P键直到出现 P003 为止输入参数按 P 键输入这是二个输入数据报文之间的最大允许时间间隔收到了有效的数据报文后如果在规定的时间间隔内没有收到其它的数据报文将值设定为0±äƵÆ÷½øÐбí11-1 计算״̬ÂÖѯ֮¼äµÄʱ¼ä¿ÉÓÃ按向上或向下箭头键按 P 键输入参数按 P 键输入0是缺省值10. 串行链路额定系统设定点但是典型情况是相当于50Hz或60Hz°´ P 键直到出现P094 为止按向上或向下箭头键直到显示器出现所需要的串行链路额定系统设定点为止可选的按P键直到出现 P 095°´ÏòÉÏ»òÏòÉϼýÍ·¼üÖ±µ½ÏÔʾÆ÷³öÏÖËùÐèÒªµÄ°´ P 键输入缺省值任选按 P 键直到出现 P 971°´ÏòÉÏ»òÏòϼýÍ·¼üÖ±µ½ÏÔʾÆ÷³öÏÖËùÐèÒªµÄ°´ P 键输入丢失更改的参数设定值 1 断电期间仍保持更改的参数设定值13. 运行显示退出参数方式 PUSS 协议程序的实例图 11- 9 至 11-11 表示使用 LAD STL语言的 USS 程序的实例网络1 初始化 USS 协议网络2 变频器 0 的控制框网络3 从变频器 0 读取一个参数这二个触点必须是相同的网络1 初始化 USS 协议网络2 用于驱动器 0 的控制框这两个触点必须是同一个触点网络3 从驱动器 0 读取一个参数图 11-10 使用 SIMATIC FBD 语言的 USS 指令举例网络2网络1网络3初始化U S S协议第一个扫描周期使能端口0的U S S协议激活0号站地址的驱动器从驱动器0读取一个参数保存I0.1的状态给临时的L寄存器保存I0.2的上升沿状态给临时的L寄存器这两个触点必须是同一个触点图 11-11 使用 SIMATIC STL 语言的 USS 指令举例。
基于S7-200PLC与步进电机的位置控制系统设计
步 进 电机驱 动器 ,用 于放 大控 制 信号 ,驱 动步 进 电机 ,带动 负载 ,步进 电机 系 统 的性 能很大 程度
上 取决 于步 进 电机 驱动器 。
设计 了一套基于 S 7 , 2 0 0 P L C的步进 电机位 置控制 系统, 由软件和硬件两部分组成 。使用 P L C高速脉冲
输 出功 能,控制步进 电机运动 。旋转编码器 作为系统的检测元件,其输 出脉冲信号反馈到 P L C,利用 P L C 的高 速计数功能 ,实现位置 的半 闭环控制 。 关键词 P L C 步进 电机 步进 电机驱动器 脉冲编码器
精 密制 造 与 自动化
2 0 1 6 年第 4 期
基于 ¥ 7 - 2 0 0 P L C与步进 电机 的位置控制 系统 设计
谷 纪 广 唐 明媚
( 1 . 新 地 能源 工 程技 术有 限公司 河 北廊坊 0 6 5 0 0 1 ;
2 .北华 航 天工业 学 院
摘 要
河北 廊坊 0 6 5 0 0 0 )
上 的拨 码开 关选 择设 定 。 旋 转编码 器 为 电压 2 4 V 的光 电编码 器 ,有 黑 、
丢 步现 象 ,停止 时 转速过 高 易 出现 过 冲现 象 ,所 以 为保证 其控 制精 度 ,往往 加 入反馈 环 节组 成高 性 能
的 闭环 、 半 闭环 控制 系统 。本文采 用 旋转 编码 器作
旋 转编 码器 是 一种光 电式旋转 测 量装 置 ,它将 被 测 的角位 移直 接转 换成 数字 信 号( 高速脉 冲信 号 ) 。 此 信号 输入 给 P L C, 利用 P L C 的高速 计数器 进 行计
毕业设计(论文)-基于S7-200 plc的自动门控制系统设计与仿真
目录1引言 (1)2系统总体设计 (3)2.1系统控制要求 (3)2.2自动门的门体结构及参数 (3)2.3自动门的机械传动机构 (4)2.4自动门的导轨及滑轮结构 (4)2.5自动门的控制系统方案确定 (5)3控制系统硬件设计 (7)3.1 PLC选型及扩展 (7)3.1.1 PLC的选型 (7)3.1.2 I/O地址分配 (8)3.1.3 PLC扩展模块 (9)3.1.4变频器的选型 (10)3.2电机及驱动控制 (10)3.2.1电机的选型 (10)3.2.2电机的主线路图 (11)3.3检测元件选型 (11)3.4低压电器选型 (12)3.4.1低压断路器的选型 (12)3.4.2熔断器的选型 (13)3.4.3控制按钮的选型 (14)3.5电源设计 (15)3.6人机接口设计 (15)3.6.1 HMI简述 (15)3.6.2 HMI的功能 (15)3.6.3 HMI的分类 (15)3.6.4 TD200按键说明 (16)4控制系统软件设计 (17)4.1控制程序流程图 (17)4.2控制程序设计 (18)4.3显示操作界面设计 (20)4.4程序调试(仿真图) (25)5结束语 (29)参考文献 (30)附录 (31)第1章引言1.1设计目的进入90年代以来,自动化技术发展很快,技术已经很成熟,并取得了惊人的成就,自动化技术是自动门的重要部分。
在现在人们生活中自动门可以节约空调能源、降低噪音、防尘、防风,同时可以使出入口显得很庄重高档,因此自动门在人们的生活中的运用越来越广泛,自动门适合于宾馆、酒店、银行、写字楼、医院、商店等。
使用中自动门的控制方法较多,但在实际中相当多的自动门系统一般采用继电器逻辑控制,这种控制方式故障率高、可靠性低、维修不方便等缺点。
而在自动门控制系统的研究设计中,稳定、安全可靠及人性化是首先考虑的因素。
因此,找到一种具有可靠性高、使用和维护方便的控制方法用于自动门的控制是目前值得研究的课题。
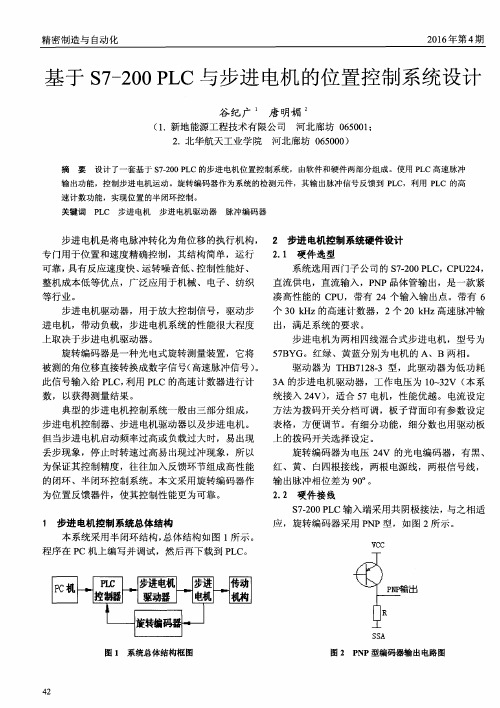
21 可编程控制器技术(PLC) 企业案例:基于PLC通信方式的速度闭环定位控制
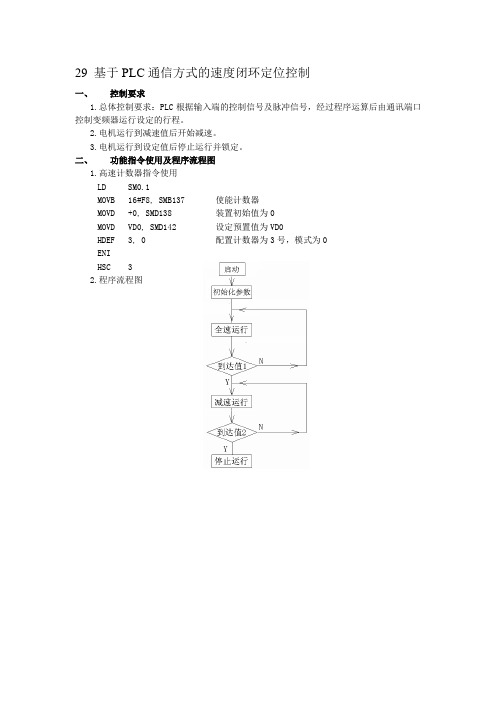
29 基于PLC通信方式的速度闭环定位控制
一、控制要求
1.总体控制要求:PLC根据输入端的控制信号及脉冲信号,经过程序运算后由通讯端口控制变频器运行设定的行程。
2.电机运行到减速值后开始减速。
3.电机运行到设定值后停止运行并锁定。
二、功能指令使用及程序流程图
1.高速计数器指令使用
LD SM0.1
MOVB 16#F8, SMB137 使能计数器
MOVD +0, SMD138 装置初始值为0
MOVD VD0, SMD142 设定预置值为VD0
HDEF 3, 0 配置计数器为3号,模式为0
ENI
HSC 3
2.程序流程图
三、端口分配及接线图
1.端口分配及功能表
序号PLC地址(PLC端子)电气符号(面板端子)功能说明1I0.1 脉冲输入
2I0.2 启动开关程序开始运行3主机1M、面板V+接电源+24V 电源正端4转速盒M 电源负端
2.PLC外部接线图
四、参数功能表
序号变频器参数出厂值设定值功能说明1P0700 1 5 命令源选择
2P1000 2 5 频率设定值选择(通过 COM 链路的USS)
3P1135 5.0 0 停止时间
4P1232 100 150 直流制动电流
5P1233 0 1 直流制动电流持续时间。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于S7—200 PLC USS协议通信的速度闭环定位控制系统设计
【摘要】本文将SIEMENS公司的S7-200 PLC和变频器应用于闭环定位控制系统的自动控制中,通过基于USS协议的RS485总线进行组网,进行PLC和变频器对电机的控制,其中PLC和变频器之间的通信设计最为关键。
可以应用于多个自动化控制系统中,大大节约了项目的开发时间和成本,在实际应用中取得了良好的效果。
【关键词】S7-200PLC;变频器;USS协议;闭环控制
随着电力电子技术以及控制技术的发展,交流变频调速在工业电机拖动领域得到了广泛应用;可编程控制器PLC作为替代继电器的新型控制装置,简单可靠,操作方便、通用灵活、体积小、使用寿命长且功能强大、容易使用、可靠性高,常常被用于现场数据采集和设备的控制;在此,本次设计就是基于S7-200PLC 的USS通信方式的速度闭环定位控制。
将现在应用最广泛的PLC和变频器综合起来通过USS协议网络控制实现速度闭环定位控制。
PLC根据输入端的控制信号及脉冲信号,经过程序运算后由通讯端口控制变频器运行设定的行程;电机运行到减速值后开始减速;电机运行到设定值后停止运行并锁定。
因此,该系统必须具备以下三个主体部分:控制运算部分、执行和反馈部分。
控制运算主要由PLC和变频器来完成;执行元件为变频器和电机;反馈部分主要为速度反馈。
S7-200 PLC通过USS协议网络控制Micro-Master MM420变频器,控制电动机的启动、制动停和定位控制,并能够通过PLC读取变频器参数、设置变频器参数。
1.系统设计的总体思路
系统主要由三个部分构成,即可编程逻辑控制器件PLC、变频器和电机。
首先通过设置给定输入给PLC,再通过PLC控制变频器,再经由变频器来控制电机,随后将电机的转速反馈给PLC,经比较后输出给变频器从而实现无静差调速。
构成闭环系统就要把速度信息反馈给输入。
速度的测量可以通过光电编码器和PLC来实现。
速度采集:S7-200具有高速脉冲采集功能,采集频率可以达到30KHz,共有6个高速计数器(HSC0~HSC5)工作模式有12种。
在固定时间间隔内采集脉冲差值,通过计算既可以获得电动机的当前转速。
例如:设采样周期为100ms即是每隔100ms采集脉冲一次,光电开关每转发出8个脉冲,那么就可以得到速度为:
其中为采样周期内接受到的脉冲数。
转速n的单位为。
闭环控制就是将速度信号反馈给PLC,再通过与给定量比较,输出给PID 控制部分,从而调节速度使其能达到设定要求。
具体如图1所示。
2.系统硬件接线与变频器的参数设置
西门子S7-200和MicroMaster变频器之间采用通讯协议USS,用户可通过程序调用的方式实现通信,编程的工作量小,是一种费用低使用方便的通讯方式。
S7-200 CPU的通信端口的规格是RS 485,因此将S7-200的通信端口与驱动装置的RS485端口连接,在RS485网络上实现USS通信无疑是最方便经济的。
系统硬件接线图如图2所示,将MM440的通信端子为P+(29)和N-(30)分别接至S7-200通信口的3号与8号针,以建立S7-200与MM420变频器的USS 通信硬件连接。
其中,I0.1为脉冲输入,I0.2为启动开关。
3.软件设计
应用S7-200PLC和变频器通过USS协议网络控制实现速度闭环定位控制。
要求PLC根据输入端的控制信号及脉冲信号,经过程序运算后由通讯端口控制变频器运行设定的行程;电机运行到减速值后开始减速;电机运行到设定值后停止运行并锁定。
系统软件程序流程图设计如图3所示。
USS协议对硬件设备要求低,减少了设备之间布线的数量。
无需重新布线就可以改变控制功能。
可通过串行接口设置来修改变频器的参数。
可连续对变频器的特性进行监测和控制。
利用S7-200 CPU组成USS通信的控制网络具有较高的性价比。
西门子S7-200和MicroMaster变频器之间采用通讯协议USS,用户可通过程序调用的方式实现通信,编程的工作量小,是一种费用低使用方便的通讯方式。
本系统USS协议通信部分程序梯形图如图4所示。
4.结语
本项目运行效果:PLC根据输入端的控制信号及脉冲信号,经过程序运算后由通讯端口控制变频器运行设定的行程;电机运行到减速值后开始减速;电机运行到设定值后停止运行并锁定,实现了速度的闭环定位自动控制。
实践证明:西门子变频器与PLC通过USS协议进行串行通讯,无须购置附件进行系统组态,直接对其组网监控,进行电机闭环调速,是一种低成本、高性能的好途径,这种设计方法具有较大的推广意义。
参考文献
[1]龚仲华.S7-200/300/400PLC应用技术[M].北京:人民邮电出版社,2008:4.
[2]陈建明.电气控制与PLC应用[M].北京:电子工业出版社,2010.
[3]西门子公司.S7-200可编程控制器系统手册[S].2005.。