两轮助力车的总体设计
老年助理车设计

老年助力车的设计专业:学号:学生:指导教师:摘要:随着科技和社会的发展和进步,各种各样的车辆将会陆续出现在公路上面,与此同时,随着生活水平的提高,针对老年人所开发的车辆也日益普遍,老年助力车也越来越得到广泛的应用,但传统的老年助力车的结构陈旧,笨重且行驶速度慢,制动性能差,所以开发出新式的结构简洁,运行平稳的老年人助力车是当今必须要解决的问题。
对这个问题解决的程度如何,反映着一个社会从科技水平到人文关怀等各方面的发达程度。
我国对这种现状的重视程度还是不够,即在交通工具上没有安装各种有效的节能设施,这种现状存在着许多不和谐因素,更使群体分化加剧,社会人文关怀程度的下降。
实现绿色驾车无污染化,并实现通过司乘人员,以及经过专门培训的人员对此类老年人助力车的简单辅助操作,即可完成的老年助力车的制动、行驶等等方面的控制,达到环保节能无污染的目的。
首先应该从机理的可行性方案上进行深入讨论,通过对动力单元研究着手,然后经过反复细致的可行性,安全性分析以及对整个系统的运动校核,功能分析,而得到并形成系统的整体的结构,并且针对本系统的特点,来选择最适合的系统方案。
因此,本文首先就方案的选择进行了研究,通过设计者掌握的专业基础知识,互联网上的相关资料以及国内外已有的设计种类的现状,经过详细的方案调查,为本次毕业设计设计出了一套环保节能的老年助力车。
关键词:老年助力车;结构;制动;调查The design of old bicycleSpecialty:Student Number:Student:Supervisor:Abstract:With the aging of the population problem is becoming more and more serious, the elderly and disabled travel, there is a problem in any country. How to solve this problem, which reflectsthe developed degree of a society from the level of science and technology to the humanistic care and other aspects of the. Our attention to this situation or not, that is no easy installation in vehicles off disabilities on facilities, this situation there are many inharmonious factors, more make the populationdifferentiation, a decline in social humanistic concern degree. The arrangement oflifting system for disabled people in the car, can improve the above situation.The disabled to pedal accessibility, and realize the company by personnel, andtrained personnel to operate this set of machinery, control to complete the disabledspecial automobile seat lifting system, to enable the disabled smoothly on the trainobjective. Should first in-depth discussion from the feasibility scheme of the mechanism, through the hands of the power unit, and then after repeated and carefulfeasibility, safety analysis and correction of motion,.the system function analysis, and get and the formation of system's overall structure, and according to the characteristics of the system, to select the most suitable system scheme the.Key words:Electric vehicle;Environmental protection and energy saving;Car door目录绪论 (1)1. 老年助力车发展概述.................................... 错误!未定义书签。
风行者-自平衡两轮车设计说明
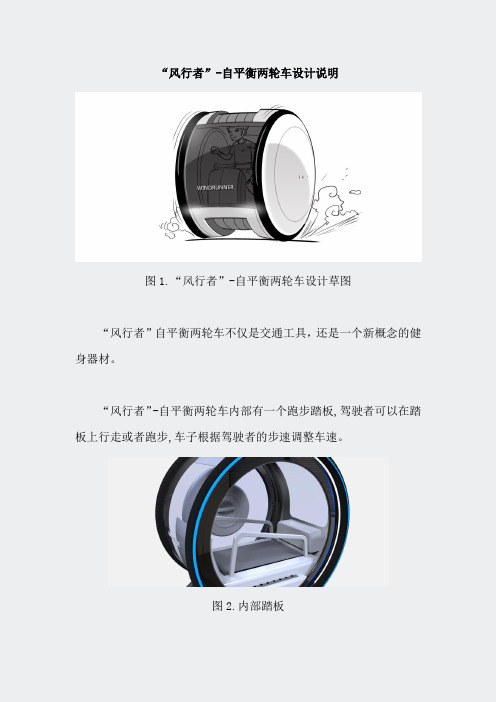
“风行者”-自平衡两轮车设计说明图1.“风行者”-自平衡两轮车设计草图“风行者”自平衡两轮车不仅是交通工具,还是一个新概念的健身器材。
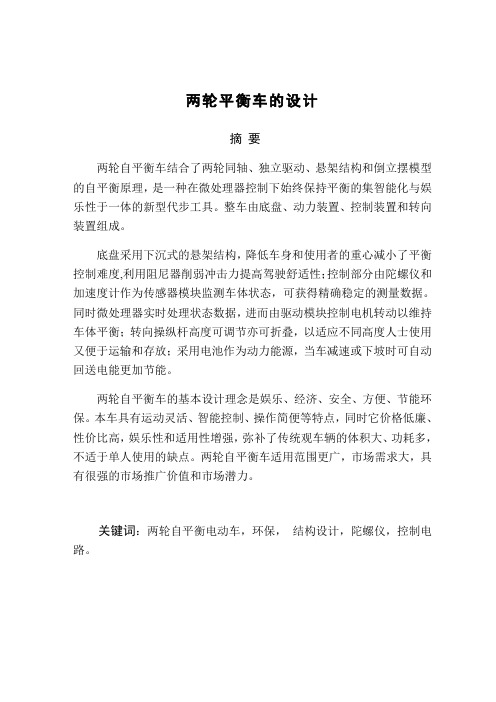
“风行者”-自平衡两轮车内部有一个跑步踏板,驾驶者可以在踏板上行走或者跑步,车子根据驾驶者的步速调整车速。
图2.内部踏板驾驶者可以通过车内的交互系统设置速度差比例。
最高可设置10倍速度差,例如人步行每小时5公里,如果设置5倍速度差,“风行者”将以每小时25公里的时速前进。
如果设置10倍速度差,“风行者”将以50公里每小时的速度前进。
由于安全的因素,“风行者”最高可以设置10倍速度差比例。
图3.通过车内交互系统设置速度差由于“风行者”采用了与传统的车辆完全不同的驾驶方式,因此车辆的转弯需要依靠驾驶者的身体语言来控制,在奔跑的过程中驾驶者通过倾斜身体来控制车子行进的方向,“风行者”监测到身体倾斜的角度后通过电脑控制车辆的转弯方向和角度。
“风行者”没有传统车辆的转弯结构,转弯是依靠两个车轮的旋转方向和旋转差速实现车辆转弯。
图4.方向控制示意图“风行者”利用人类走路或者跑步时的平衡模式原理,使车仓在运动模式下保持空间平衡。
“风行者”在驾驶者驾驶过程中全程监测驾驶者身体状态。
一旦发现驾驶者身体出现意外状况,就会自动接通医院急救电话和驾驶者的亲属,并告知其原因和地点。
并自动将车辆安全停靠到安全地带,等待救援人员到来。
图5.安全实时监控“风行者”采用电能作为动力能源。
可以采用家庭交流电和加电站为“风行者”充电。
“风行者”采用快速充电技术,可以在极短的时间内为“风行者”充满电能。
另外“风行者”可以将驾驶人员跑步所产生的的能量转为电能,使资源利用最大化。
图6.充电示意图当驾驶人员疲惫后,但又没有到达目的地,“风行者”可以切换为自动驾驶模式,弹出隐藏的座椅。
并根据设定好的目的地自动识别路线,自动避让车辆,将驾驶者安全快速的送达到目的地。
图7.隐藏式座椅由于“风行者”独特的车身结构,无法采用传统车辆“车轴”式的模式。
浅谈segway代步车原理及设计

“Segway双轮电动车”的分析工设11 赵晋19 2012/5/9初到北京,“segway双轮电动车”是让我印象最深的一个东西。
当时和家人去鸟巢观光,意外地看到那儿的保安在使用一种两个轮子的、看似简单却新奇得很的行驶工具。
当时一直记在脑海里却也说不出这个是什么。
这回通过向相关人员进行的咨询,再加上自己对网上一系列资料的整理,使我对于这种工具有了进一步的了解与思考。
对于我个人而言,实在有种“幸甚至哉”的雀跃之感。
——序言Segway双轮电动车,俗称电动代步车,是一种电力驱动、具有自我平衡能力的个人用运输载具。
该车在操作时不需要刹车装置或者节流杆,当驾驶者身体前倾时,机车前进;当驾驶者身体直立时,机车停止。
下面我来介绍一下segway的工作原理,以及就此车型而言提出几点设计方面的想法。
运作原理segway主要是建立在一种被称为“动态稳定”的基本原理上,也就是车辆本身的自动平衡能力。
以内置的精密固态陀螺仪来判断车身所处的姿势状态,透过精密且高速的中央微处理器计算出适当的指令后,驱动马达来做到平衡效果。
就如同人体站立前倾时会失去平衡,但人体天生的平衡器官会告知大脑这一情形,并由大脑下达移动脚步的指令以维持平衡。
Segway用轮子取代了脚的功能,复制了人类高精密的平衡动作。
segway最基本的内部构造可被概括为传感系统、控制系统和马达系统。
1)传感系统最原始的传感系统是一个陀螺仪的组合,但陀螺仪的框架会自由地在空间移动。
通过测量轮子相对于框架的位置,精确的传感器能感知倾斜度(从正直的方向偏离多少)和倾斜速度(倾斜得有多快)。
但原始的陀螺仪过于笨重,segway运用不同的机械机制达到相同的效果。
它使用一种特殊的电晶体硅传感器,这种陀螺仪能通过地球自转偏向力的效果在一个非常小的范围里决定旋转。
就好像飞机飞的是直线,但看起来好像是弯曲的,这是因为下面的地球在旋转。
一个典型的电晶体硅传感器包括一个安装在支持性框架上的硅钢片。
两轮自平衡小车的设计

两轮自平衡小车的设计设计原理:两轮自平衡小车的设计原理基于倾角控制算法和正反馈控制理论。
当车身发生倾斜时,传感器将感知到倾角,并通过控制算法计算出合适的电机控制信号,使车身产生逆倾的力矩,从而使车身重新回到平衡状态。
当车辆向前倾斜时,电机会产生足够的力矩向前旋转,使小车向前加速,反之亦然。
通过不断监控和调整车体的倾角,小车能够保持平衡,并根据用户的指令进行前进、后退、转弯等动作。
硬件组成:1.IMU:IMU是最核心的传感器之一,通常由陀螺仪和加速度计组成。
陀螺仪用于测量车身的旋转角速度,加速度计则用于测量车身的倾角。
通过对陀螺仪和加速度计测量结果的融合,可以得到较为准确的车身姿态信息。
2.电机驱动器:电机驱动器用于控制电机的转速和方向。
它接收来自控制器的电机控制信号,并根据信号的大小和方向来调整电机的运转。
常见的电机驱动器有H桥驱动和PWM调速电路。
3.电机:两轮自平衡小车通常采用直流电机作为动力源。
电机的规格和功率根据车辆的大小和负载来确定。
一般情况下,电机的转速和扭矩越高,小车的稳定性和运动性能越好。
5.控制器:控制器是小车的主要计算和决策中心。
它接收来自IMU的姿态信息,通过算法计算出电机控制信号,并将信号传递给电机驱动器。
控制器通常采用单片机或微控制器作为基础,并配备相应的传感器接口、通信接口和控制算法。
软件控制:1.姿态控制算法:姿态控制算法通过对IMU传感器测量数据的处理,确定小车的倾角,并根据倾角的变化来计算电机的控制信号。
常见的姿态控制算法有PID控制器和卡尔曼滤波算法等。
2.运动控制算法:运动控制算法用于实现小车的前进、后退、转弯等动作。
它通过根据用户的指令调整电机的转速和方向,使小车按照预定的路径和速度运动。
常见的运动控制算法有速度控制和位置控制等。
3.用户界面:用户界面是与用户交互的界面,用于发送指令和接收反馈信息。
用户可以通过按钮、摇杆等设备来控制小车的运动,并通过显示屏、LED灯等设备来获取小车的工作状态。
两轮电动车系统设计

学位论文作者签名:王宇娜 日期: 2008 年 2 月 18 日
指导教师签名: 胡立生 日期: 2008 年 2 月 18 日
-4-
上海交通大学硕士学位论文
第一章 绪论
Hale Waihona Puke 1.1 研究背景及意义随着人们环保意识的日趋加强,石油资源的日趋告急,微电脑技术、电子技术、 智能控制技术、电机技术、传感器技术、电池等的高速发展,电动车尤其是采用高 新技术的智能电动车日益显现出强劲的发展势头。两轮电动车作为一种新型代步工 具,引起了业界的广泛关注。 在国外,日本 Electro-Communications 大学的 Kazuo Yamafuji 教授在 1986 年提 出制造一种自动站立机器的构思。该机器人有两个轮子,但没有平衡台,控制电路 和驱动电动安装在上部,利用绑在轮子上的小杠杆与地面相接触,作为传感器来检 测机器人的倾斜度。由于受当时计算机、传感器等技术的限制,该项技术的前景和 实用性并不明朗,所以其研究并没有受到太多人们的重视。直到 2001 年 12 月,美 国发明家卡门 (Dean Kamen) 发明了一种新型的方便快捷的两轮交通工具 “Segway” , 该项技术才成为全球机器人控制技术。 在国内, 也有很多大学进行了相应的研究[1][2]。 两轮电动车是一种特殊轮式移动机器人,其动力学方程是一多变量严重不稳定、 耦合、时变、参数不确定性的非线性高阶方程,加上运动学方程中的非完整性约束, 要求完成的控制任务也具有多重性,因此,两轮电动车是作为一个具体的复杂系统, 给控制理论提出了很大的挑战,是检验各种控制方法处理能力的典型装置。两轮车 作为一种研究装置,可在上面进行不确定性系统控制、非线性系统控制、自适应控 制、智能控制等研究。同时,两轮电动车也是一种便利的交通工具,具有较强的实 用价值。
两轮自平衡车的设计研究

两轮自平衡车的设计研究首先,两轮自平衡车的设计中最重要的组件是姿态感知器和控制系统。
姿态感知器通过加速度计和陀螺仪等传感器来感知车辆的姿态变化,并将数据传递给控制系统。
控制系统根据这些数据来计算出应该施加的力矩,以保持车辆的平衡。
我们需要精确地设计和调整这些组件,以确保车辆能够稳定地保持平衡。
其次,两轮自平衡车的动力系统也至关重要。
目前常用的动力系统是电池供电的电动机。
电动机将电能转化为机械能,驱动车辆前进。
设计动力系统时需要考虑能量效率、稳定性和驱动力的大小。
另外,选择合适的电池类型和容量也是关键,以确保车辆的续航能力。
此外,两轮自平衡车的操控系统也需要设计和研究。
一个简单直观的操控系统可以提高用户体验,并减少操作难度。
常见的操控系统包括使用身体重心移动来控制车辆的前进、后退和转向。
此外,也可以考虑添加智能化的操控功能,如蓝牙连接手机进行远程操控等。
在结构设计方面,两轮自平衡车需要考虑车辆的稳定性和可靠性。
一个好的结构设计能够提高车辆的抗风性和减震性能。
此外,车辆的重心位置也需要合理安排,以减小车辆倾倒的风险。
最后,两轮自平衡车的安全性是设计中不可忽视的因素。
设备应具备紧急停止和防护措施,以防止意外伤害。
例如,可以在车辆上加装限位开关,在发生故障时停止电机的运转。
另外,可以考虑添加LED灯和蜂鸣器等装置,以提高车辆的可见性和警示效果。
总之,两轮自平衡车的设计研究涉及姿态感知器和控制系统、动力系统、操控系统、结构设计和安全性等多个方面。
通过合理设计和研究,可以提高车辆的平衡性、稳定性和安全性,进一步推动两轮自平衡车的发展和广泛应用。
自动平衡同轴双轮电动小车系统设计

--自动平衡同轴双轮电动小车系统设计Design of Automatic Balance Coaxial Double Electric Car System学生学号:学生姓名:专业班级:指导教师:职称:起止日期:2----摘要本课题旨在研制一种自平衡同轴双轮自平衡小车。
该系统是一种两轮左右平行布置的单人电动车,像传统的倒立摆一样,本身是一个自然不稳定体,必须施加强有力的控制手段才能使之稳定。
由于它的行为与火箭飞行以及两足机器人行走有很大的相似性,因而对其进行研究具有重要的理论和实践意义。
系统以姿态传感器(陀螺仪、加速度计)来检测侧身所处的俯仰状态和状态变化率,通过高速中央处理器计算出适当数据和指令后,驱动电动机产生前进或后退的加速度来达到车体前后平衡的效果。
控制技术是运动控制的核心,在实际生产实践中应用最普遍的是各种以PID为代表的基本控制技术。
按照偏差的比例、积分和微分进行控制的调节器,简称为PID调节器,是连续系统中技术成熟且应用广泛的一种调节器。
本文对系统用到的PID 控制技术做了相应的研究,从理论上分析了变积分的PID控制技术的优势,并在系统的实际测试中获得了良好的效果。
关键词:自平衡;陀螺仪;加速度计;PID控制----AbstractIn this thesis, a two-wheeled vehicle with the characteristic of self-balancing was developed. For the prototype design, the vehicle is arranged by two paralleled wheels and powered by electric motor, which is an unstable object needed force to keep balance, just as the traditional ‘inverted pendulum’. Since the action principle is similar to rocket flying and robot waking, this research is meaningful for the theory and practice.According to the inertial sensor (gyroscope, accelerometer ),the monitoring data of pitching state changing are input into the MCU(Micro Control Unit)calculation for the acceleration commands to drive the motor forward/backward for the balance keeping. Control technique is the core of vehicle movement, which is typical with PID (Proportion Integration Differentiation) technique in practice. PID moderator is a technology-matured moderator for wide application in continuous system, which based on deviation proportion, integration and differentiation. In this thesis, PID control technique was detailed investigated in theory, especially for the advantages of PID variational integralion, and finally well-performance was achieved in the application.Key words: self-balance; gyroscope; accelerometer; PID----目录摘要 (II)Abstract (III)第1章绪论 (1)1.1前言 (1)1.2自平衡同轴双轮小车的研究意义 (1)1.3 两轮自平衡小车的发展历程和现状 (1)1.3.1国外研究成果 (2)1.3.2国内的研究成果 (3)1.4 本文的研究内容 (4)第2章系统原理分析 (5)2.1控制系统要求分析 (5)2.2平衡控制原理分析 (6)2.3姿态检测系统分析 (7)2.3.1陀螺仪数据处理 (7)2.3.2加速度计数据处理 (8)2.3.3传感器数据处理的必要性 (9)2.3.4基于卡尔曼滤波的数据融合 (10)2.4 PID控制技术 (12)2.4.1 PID控制技术的应用现状 (13)2.4.2 PID调节规律 (13)2.4.3 积分分离的PID算法 (14)2.4.4 PID控制器参数的确定 (14)第3章系统硬件结构 (16)3.1系统硬件组成及工作原理 (16)3.1.1系统的结构框图 (16)3.1.2系统的组成 (16)3.2直流无刷电动机 (17)3.2.1 直流无刷电机选择理由 (17)3.2.2 直流无刷电机调速 (17)3.2.3 直流无刷电机控制方法 (18)3.3电机驱动器 (18)----3.3.1电源部分 (19)3.3.2功率元件部分 (19)3.3.3功率管驱动芯片 (20)3.3.4硬件设计中的抗干扰措施 (21)3.4陀螺仪 (22)3.4.1陀螺仪简介 (22)3.4.2 陀螺仪的应用电路 (23)3.5加速度计 (24)3.5.1加速度计简介 (24)3.5.2加速度计应用电路 (25)3.6控制器 (26)3.6.1微控制器选型 (26)3.6.2 AVR 、ATmega16L单片机简介 (28)3.6.3复位电路 (29)3.6.4 A/D模数转换电路 (29)第四章系统软件设计与实际测试 (31)4.1系统软件功能模块划分 (31)4.2软件功能模块设计 (31)4.2.1初始化和主循环模块 (31)4.2.2 A D采样及采样数据滤波处理模块 (32)4.2.2陀螺仪与加速度计输出值转换 (33)4.2.3卡尔曼滤波器的软件实现 (34)4.2.4平衡PID控制软件实现 (37)4.2.5两轮自平衡车的运动控制 (38)结论 (41)致谢 (42)参考文献 (43)----第1章绪论1.1前言移动机器人是机器人学的一个重要分支,对于移动机器人的研究,包括轮式、腿式、履带式以及水下式机器人等,可以追溯到20世纪60年代。
两轮平衡车的设计
两轮平衡车的设计摘要两轮自平衡车结合了两轮同轴、独立驱动、悬架结构和倒立摆模型的自平衡原理,是一种在微处理器控制下始终保持平衡的集智能化与娱乐性于一体的新型代步工具。
整车由底盘、动力装置、控制装置和转向装置组成。
底盘采用下沉式的悬架结构,降低车身和使用者的重心减小了平衡控制难度,利用阻尼器削弱冲击力提高驾驶舒适性;控制部分由陀螺仪和加速度计作为传感器模块监测车体状态,可获得精确稳定的测量数据。
同时微处理器实时处理状态数据,进而由驱动模块控制电机转动以维持车体平衡;转向操纵杆高度可调节亦可折叠,以适应不同高度人士使用又便于运输和存放;采用电池作为动力能源,当车减速或下坡时可自动回送电能更加节能。
两轮自平衡车的基本设计理念是娱乐、经济、安全、方便、节能环保。
本车具有运动灵活、智能控制、操作简便等特点,同时它价格低廉、性价比高,娱乐性和适用性增强,弥补了传统观车辆的体积大、功耗多,不适于单人使用的缺点。
两轮自平衡车适用范围更广,市场需求大,具有很强的市场推广价值和市场潜力。
关键词:两轮自平衡电动车,环保,结构设计,陀螺仪,控制电路。
Two balanced car designAbstract:Two-wheeled self-balancing two-wheeled vehicle combines a coaxial , independent drive , suspension structure and the inverted pendulum model of self-balancing principle , under microprocessor control is always a balanced set of intelligent and entertainment in one of the new means of transport. The vehicle chassis , power means , control means and steering components.Chassis sunken suspension structure, reducing the user's center of gravity of the body and reduces the balance control difficulty, weaken the impact of the use of dampers to improve driving comfort ; controlled in part by a gyroscope and accelerometer sensor module status monitoring body obtained accurate and stable measurement data. Real-time processing while the microprocessor status data , and thus the motor rotation is controlled by the drive module in order to maintain the balance of the vehicle body ; height adjustable steering lever can fold to accommodate users of different heights and easy transport and storage ; using batteries as a power and energy , when the vehicle deceleration or downhill can be automatically sent back more energy saving and environmental protection .Two self-balancing tour bus basic design philosophy is entertainment , economic, safe and convenient.The sports car has a flexible , intelligent control, simple operation , but it is inexpensive , cost-effective , entertainment and fitness enhancement, make up the traditional tourist vehicles bulky, power consumption and more suitable for single use shortcomings. Two-wheeled self-balancing vehicle suitable for a wider range of sightseeing , market demand , with strong marketing value and market potential.Key words:Twoself-balancingelectric vehicle, environmental,structural design,Gyro,control circuit.目录第一章绪论...............................................................................................................错误!未定义书签。
多功能老人助力车设计与分析
174研究与探索Research and Exploration ·工艺与技术中国设备工程 2019.08 (下)我国60岁以上老年人口20243万,占总人口的14.9%。
其中65岁及以上人口13161万人。
全世界老年人口超过1亿的国家只有中国。
2亿老年人口数几乎相当于印尼的总人口数,已超过了巴西、俄罗斯、日本等人口大国的人口数。
如果作为一个国家的总人口数,也能排世界第四位。
预计2033年前后将翻番到4亿,2050年左右,老年人口将达到全国人口的1/3,“银发潮”将对我国的经济、社会、政治、文化发展产生深远的影响。
设计了一款新型老年助力车,这款实用新型老年助力车,是参照不锈钢折叠椅、三角爬楼车轮和轮椅等原理设计而成。
单人出门时可当老人手推车使用,能防止老人摔倒。
与他人聊天时,可当椅子坐。
双人出行可坐可推,方便实用;出远门时可折叠起来,节约空间。
除爬山外,该款老年助力车可实现任一景点旅游观光使用。
老年助力车能帮助子女尽孝、方便老人的日常生活,减振性好,为构建和谐社会创造了条件。
1 助力车总体设计助力车结构设计合理,主骨架采用无缝钢管焊接而成,联接点采用铆钉固定。
助力车高度适宜,老人乘坐方便,有扶手和靠背,同时配有可折叠遮阳下雨两用伞,可手动上下调节、高温和雨天均可出行。
配备有旅行袋,可放置食品、药品和水,确保可以安全、舒适、轻便地为老人的晚年生活服务。
这种助老车椅主要由主体框架、万向轮、三角轮、坐板、曲柄摇杆机构、齿轮齿条机构、伞、旅行袋等相互组装而成。
系统组成如图1所示,三维实体装配如图2所示。
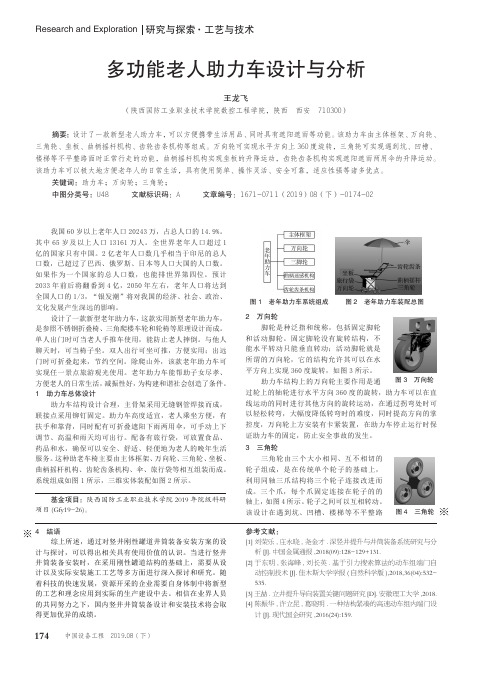
多功能老人助力车设计与分析王龙飞(陕西国防工业职业技术学院数控工程学院,陕西 西安 710300)摘要:设计了一款新型老人助力车,可以方便携带生活用品、同时具有遮阳遮雨等功能。
该助力车由主体框架、万向轮、三角轮、坐板、曲柄摇杆机构、齿轮齿条机构等组成。
万向轮可实现水平方向上360度旋转,三角轮可实现遇到坑、凹槽、楼梯等不平整路面时正常行走的功能,曲柄摇杆机构实现坐板的升降运动,齿轮齿条机构实现遮阳遮雨两用伞的升降运动。
两轮平衡车的设计
两轮平衡车的设计两轮平衡车是一种电动交通工具,具有非常好的操控性和平衡性。
它被广泛应用于短途出行、城市交通等方面。
一个好的设计和工艺不仅能提高车辆的性能,还能增加驾驶者的安全性。
在下面的文章中,将介绍两轮平衡车的设计及其主要部件。
首先,两轮平衡车的主要部件包括车身、电机、电池、控制器和传感器。
车身是整个平衡车的框架,必须具有足够的强度和刚度以支撑驾驶者和其他部件。
车身通常由高强度材料制成,如铝合金或碳纤维复合材料。
这些材料具有轻量化和高强度的特点,可以减少车身的重量,增加驾驶的灵活性。
电池是平衡车的能量储存装置,可以提供电机所需的电能。
目前市场上主要有铅酸电池、镍氢电池和锂电池等多种类型的电池。
铅酸电池价格低廉,但体积大、重量重。
镍氢电池体积小,容量大,使用寿命长。
锂电池不仅容量大,而且体积小,重量轻,适合平衡车的应用。
平衡车的电池容量也应根据车辆的需求进行选择,以确保车辆的行驶里程。
控制器是平衡车的核心部件,它包含了车辆的控制算法和电机驱动电路。
控制器通过读取传感器的数据,实时计算车辆的姿态和加速度等信息,并根据设定的控制策略来控制电机的工作。
控制器不仅要保证车辆的平衡,还要具有过载保护、过压保护、过流保护等功能,以确保车辆的安全性和稳定性。
传感器是平衡车的感知器官,通过感知车辆的姿态、加速度、角度等信息,并将这些信息传递给控制器。
常用的传感器有陀螺仪、加速度计、角度传感器等。
陀螺仪可以感知车辆的旋转角速度,加速度计可以感知车辆的加速度,角度传感器可以感知车辆的倾斜角度。
通过这些传感器的合理组合和数据处理,可以实现车辆的平衡和操控。
除了上述主要部件之外,两轮平衡车还可以配备照明灯、喇叭、液晶显示屏等附加设备,以提高驾驶者的安全性和便利性。
照明灯可以增加车辆的可见性,喇叭可以提醒行人和其他车辆,液晶显示屏可以显示车辆的速度、电量和故障信息等。
这些设备的设计应考虑到车辆的美观性和人机交互性,以便驾驶者能够方便地获取相关信息。
两轮平衡小车硬件设计的原理!

两轮平衡小车硬件设计的原理!1.结构设计原理:两轮平衡小车的基本结构包括车身、轮子、电机、电机控制器、传感器等。
车身是支撑整个小车的主要部分,可以采用金属材料或者塑料制作。
轮子通过轴与电机相连,通过电机的旋转产生推力,实现小车的运动。
电机控制器负责控制电机的转速和方向,进而控制小车的运动。
传感器用于测量小车的倾斜角度、速度等信息,将这些信息反馈给电机控制器,以实现车身平衡的控制。
2.电机驱动原理:两轮平衡小车通常采用直流无刷电机作为驱动装置,其驱动原理为通过电磁场的作用,使电机产生旋转力矩,进而驱动车轮的转动。
电机控制器通过控制电机的通电和断电来控制电机的转速和方向。
根据小车的运动情况,电机控制器计算出相应的驱动信号,通过PWM调制的方式对电机进行控制,使其产生合适的力矩,保持整车平衡。
3.传感器反馈原理:为了实现小车的平衡控制,需要通过传感器获取小车的倾斜角度和速度等信息。
常见的传感器包括陀螺仪和加速度计。
陀螺仪用于测量小车的倾斜角度,通过检测绕垂直轴的旋转变化来确定倾斜角度的变化情况。
加速度计用于测量小车的加速度和速度,根据牛顿第二定律将加速度转换为车身的倾斜角度。
传感器将获取到的数据传输给电机控制器,以进行平衡控制。
4.控制算法原理:两轮平衡小车的控制算法主要包括PID控制算法和卡尔曼滤波算法。
PID控制算法通过对误差、偏差和积分的计算和比较,得到控制信号,实现平衡控制。
卡尔曼滤波算法通过对传感器的测量数据进行预测和修正,消除传感器噪声,提高控制的精度和稳定性。
5.电源系统原理:两轮平衡小车的电源系统主要包括电池和电源管理模块。
电池作为提供电能的装置,需要充分满足电机和控制器的功率需求。
电源管理模块用于对电池进行保护,包括电池的充放电控制、电压监测、温度保护等功能,以确保电池的安全和长寿命。
通过以上原理,两轮平衡小车的硬件设计能够实现车身平衡控制、运动控制和电源管理等功能,为实现小车的平稳运行提供了必要的支撑。
手动坐站两用助力车的设计研究

工装设计手动坐站两用助力车的设计研究徐肖松 张 琪 李泽晨 孙秋艳 吕志伟(华北理工大学 机械工程学院,河北 唐山 063210)摘 要:为了帮助行动不便人群出行设计了这款手动坐站两用助力车,只需要运用手部便能提供动力,使助力车移动。
在研究过程中建立了助力车整体模型,重点设计了助力车的手动操作装置,这种手动坐站两用助力车成本较低、更加安全、环保,能在一定程度上解决腿部残疾人群出行不便的问题。
关键词:坐站两用;助力车;手动;操作装置前言:中国已经逐渐进入老龄化社会,截止2020年底,60岁以上老年人口达到2.55亿,2.3亿的人里有近4400万人是失能、半失能的老人。
到2035年老年人口将达到4亿人,失能、半失能的老人数量会进一步增多,在这种情况下中国对助力车的需求很大,对车辆的要求也比以前更高。
目前主流的电动助力车成本高,速度过快,不够安全环保,市场上存在的少量手动助力车刹车系统不安全,为了改善这些弊端,解决行动不便人群的出行问题,我们设计了这款手动助力车,希望能为行动不便人群提供一种满足出行要求的交通工具。
1. 助力车设计1.1工作原理手动坐站两用助力车操作装置安装在车架前面,采用前轮驱动。
使用者坐在座椅上,一只手摇动左右摇臂提供动力,另一只手控制方向和制动,左右摇臂转动使转动轴转动,从而带动链轮转动,将动力通过链条传递给前车轮,助力车运动。
1.2整体结构设计助力车整体模型如下图1所示,主要包括五大部分:操作装置、传动装置、车轮、座椅、车架。
操作装置至于车身前方,可以提供动力、控制方向。
通过传动装置连接操作装置与车轮,前轮转动带动后轮使助力车移动。
车身后方配有站立扶手和载物篮。
图1 手动坐站两用助力车整体模型图1.3手动操作装置设计本文设计的手动助力车操作装置如下图2所示,主要包括:左右手柄、左右摇臂、转动轴、扶手、制动手柄、链轮等。
转动轴贯穿整个操作装置,通过轴承安装在车体上,左右摇臂连接在转动轴的两端,左右摇臂和转动轴之间采取键连接,左手柄连接左摇臂,右手柄连接右摇臂,左右摇臂外侧有锁紧螺母紧固,轴承位于左右摇臂的内侧,转动轴通过过盈配合与轴承内圈相连,车体通过过渡配合与轴承外圈相连,链轮安装在转动轴上,防尘罩罩在链轮外面,转动轴通过安装在上面的链轮将左手柄或右手柄的扭矩传递到车轮上。
手扶式智能电动助力两轮车的设计
手扶式智能电动助力两轮车的设计
孔维蓉;何培祥;黄儒毅;李博;徐丹
【期刊名称】《贵州农业科学》
【年(卷),期】2014(000)004
【摘要】为解决山地丘陵地区物资运输问题,进行了手扶式智能电动助力两轮车整车机械结构、手柄推力检测传感器的设计和系统主程序的设计。
电动助力两轮车以 DSPIC30F2010单片机为控制核心,采用模块化设计思想,设计了电流检测模块、电源模块、手柄推力检测模块、刹车信号检测模块、转子位置检测模块和电机驱动模块,构成控制器硬件系统。
经测试,手扶式智能电动助力两轮车能实现智能电动助力,让操作更便捷省力,可提高农民的工作效率。
【总页数】4页(P216-218,223)
【作者】孔维蓉;何培祥;黄儒毅;李博;徐丹
【作者单位】西南大学工程技术学院,重庆 400715;西南大学工程技术学院,重庆 400715;西南大学工程技术学院,重庆 400715;西南大学工程技术学院,重庆400715;西南大学工程技术学院,重庆 400715
【正文语种】中文
【中图分类】S229.1
【相关文献】
1.电动两轮车电池智能监控器 [J], 海南
2.智能电动助力车精确助力控制系统设计 [J], 张艳燕;张桂香
3.一种手扶式小型电动挖蒜机的设计与试验研究 [J], 秦贞龙;高迟
4.电动两轮车再启动控制系统设计 [J], 宋锦;万清;李克靖
5.手扶式田间电动运输车的虚拟样机设计 [J], 刁天成;李云伍;陈冀平;张长华;曾庆庆
因版权原因,仅展示原文概要,查看原文内容请购买。
双轮自平衡车设计报告

双轮自平衡车设计报告学院…………..........班级……………………姓名………………..手机号…………………..姓名………………..手机号…………………..姓名………………..手机号…………………..目录一、双轮自平衡车原理二、总体方案三、电路和程序设计四、算法分析及参数确定过程一.双轮自平衡车原理1.控制小车平衡的直观经验来自于人们日常生活经验。
一般的人通过简单练习就可以让一个直木棒在手指尖上保持直立。
这需要两个条件:一个是托着木棒的手掌可以移动;另一个是眼睛可以观察到木棒的倾斜角度和倾斜趋势(角速度)。
通过手掌移动抵消木棒的倾斜角度和趋势,从而保持木棒的直立。
这两个条件缺一不可,让木棒保持平衡的过程实际上就是控制中的负反馈控制。
图1 木棒控制原理图2.小车的平衡和上面保持木棒平衡相比,要简单一些。
因为小车是在一维上面保持平衡的,理想状态下,小车只需沿着轮胎方向前后移动保持平衡即可。
图2 平衡小车的三种状态3.根据图2所示的平衡小车的三种状态,我们把小车偏离平衡位置的角度作为偏差;我们的目标是通过负反馈控制,让这个偏差接近于零。
用比较通俗的话描述就是:小车往前倾时车轮要往前运动,小车往后倾时车轮要往后运动,让小车保持平衡。
4.下面我们分析一下单摆模型,如图4所示。
在重力作用下,单摆受到和角度成正比,运动方向相反的回复力。
而且在空气中运动的单摆,由于受到空气的阻尼力,单摆最终会停止在垂直平衡位置。
空气的阻尼力与单摆运动速度成正比,方向相反。
图4 单摆及其运动曲线类比到我们的平衡小车,为了让小车能静止在平衡位置附近,我们不仅需要在电机上施加和倾角成正比的回复力,还需要增加和角速度成正比的阻尼力,阻尼力与运动方向相反。
5 平衡小车直立控制原理图5.根据上面的分析,我们还可以总结得到一些调试的技巧:比例控制是引入了回复力;微分控制是引入了阻尼力,微分系数与转动惯量有关。
在小车质量一定的情况下,重心位置增高,因为需要的回复力减小,所以比例控制系数下降;转动惯量变大,所以微分控制系数增大。
两轮自平衡载具的设计
两轮自平衡载具的设计两轮自平衡载具具有巨大的发展潜力和广泛的前景,已成为机器人研究领域中的热点。
在对国内外两轮自平衡载具的研究成果进行总结和归纳的基础上,设计了一种两轮自平衡载具。
该载具的两侧各装有一个直流无刷轮毂电机,使用者可以站立在载具的脚踏板上,通过改变身体重心来操作载具前进、后退和转向。
所设计的载具包括机械和电路两部分。
在设计载具的电路时秉持模块化的思想,将该电路分为主控制电路和电机驱动电路,两者均采用Cortex-M内核的处理器。
主控制电路测量载具的运行姿态后,根据控制算法计算出电机所需的输出转矩,再将指令发送到电机驱动电路,控制无刷电机转动。
给出了电机驱动器的测试波形,证明该驱动器能实现电子换向和闭环调速。
在设计载具的机械本体时,从安全、舒适和简单的角度出发,讨论了载具的搭乘和操作方案,接着给出了载具的设计图及装配图。
使用陀螺仪和加速度计测量载具的运行姿态。
因为陀螺仪存在漂移问题,加速度计动态性能差,所以单独使用其中任何一种传感器都不能准确测量载具的运行姿态。
为了满足测量要求,同时使用陀螺仪和加速度计测量载具姿态,并提出了一种滤波和数据融合算法,以弥补两者在测量载具姿态时的不足。
通过搭建测试平台并实验,证明该算法能较准确地拟合出载具的姿态。
针对载具的平衡和转向问题,分别建立了数学模型并设计控制算法。
一方面设计了一种参数自整定控制算法,可根据载具的俯仰姿态计算出两侧电机的共模调速指令,实现平衡控制。
另一方面根据载具的偏航姿态,使用PID控制算法控制两侧电机的差模调速信号,实现转向控制。
该参数自整定模糊控制算法不需要设计者精心挑选控制参数,而是通过比较系统响应与给定之间的差别来对控制参数进行自整定,降低了控制器设计过程中对设计者经验的要求。
文章末尾给出了在Simulink环境下的仿真结果和在小型载具模型上的实验结果,验证了该模糊控制算法的有效性。
电动两轮车驱动系统解决方案
电动两轮车驱动系统解决方案一、引言电动两轮车是一种环保、便捷的交通工具,其驱动系统的设计和选择对于车辆的性能和效率至关重要。
本文将详细介绍电动两轮车驱动系统的解决方案,包括机电选择、电池组设计、控制器选型和传动系统设计等方面。
二、机电选择1. 功率需求根据电动两轮车的使用需求和车辆分量,确定所需的机电功率。
普通来说,电动两轮车的机电功率在500W至2000W之间。
根据实际情况,选择适合的机电功率。
2. 类型选择目前市场上常见的电动两轮车机电类型有直流无刷机电和交流无刷机电。
直流无刷机电结构简单、成本较低,适合于低功率电动两轮车;交流无刷机电效率较高,适合于高功率电动两轮车。
根据需求选择合适的机电类型。
3. 额定转速根据车辆的最高速度和轮胎直径,计算出电动机的额定转速。
确保机电在额定转速下能够提供足够的扭矩和功率。
三、电池组设计1. 电池类型目前常见的电动两轮车电池类型有铅酸电池、镍氢电池和锂离子电池。
铅酸电池成本低、安全性高,但能量密度较低;镍氢电池能量密度较高,但成本较高;锂离子电池能量密度高、自放电率低,但成本较高。
根据需求选择合适的电池类型。
2. 电池容量根据车辆的续航里程需求和机电功率,计算出所需的电池容量。
确保电池能够满足车辆的行驶里程要求。
3. 充电系统设计合适的充电系统,包括充电器和充电接口。
充电器的功率和充电时间应与电池容量相匹配,充电接口应方便快捷。
四、控制器选型1. 控制策略根据电动两轮车的需求,选择合适的控制策略。
常见的控制策略有电流控制、速度控制和位置控制等。
根据车辆的性能要求和成本考虑,选择最合适的控制策略。
2. 控制器参数根据机电的额定电流和电压,选择合适的控制器。
控制器的额定电流和电压应与机电匹配,以确保系统的正常运行。
3. 保护功能控制器应具备过电流保护、过温保护、过压保护和欠压保护等功能,以保证电动两轮车的安全运行。
五、传动系统设计1. 齿轮传动根据电动两轮车的功率需求和速度比要求,设计合适的齿轮传动系统。
两轮自平衡电动车设计方案的探讨
两轮自平衡电动车设计方案的探讨周小仨【期刊名称】《办公自动化(综合版)》【年(卷),期】2013(000)003【摘要】The traditional electric vehicles possessed the structure withfront&rear wheels, this paper discusses a new 2-wheeled electric transportation vehicles possessed the structure with right&left wheels, and needn't the riding skill for the people, it can be balanced automatically.The control thought of inverted pendulum will be used and adopted the modern electronic technology, composed with the hardware of micro controller, gyroscope and accelerometer, Hall element, brushless motor and mechanical structure etc. introduced PID fuzzy control algorithm, Kalman filter, multi-sensor data convergence etc. software algorithms to implement the forward&backward of the electric bike, flexible turning around as well as auto-balancing.% 传统的电动车是前后轮结构,本文探讨一种新的两轮电动交通工具是左右轮结构,且不需要人的骑行技术,能自动平衡。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
两轮助力车的总体设计
电动助力车,是指以蓄电池作为辅助能源在普通小型车的基础上,安装了电机、控制器、蓄电池、转把、闸把等操纵部件和显示仪表系统的机电一体化的交通工具。
1明确设计任务,编写设计任务书
2系统功能描述
3工艺原理选择
工作原理一般所说的直流电动机是指具有换向器和电刷的直流电动机。
在这种电动机中定子侧安装固定主磁极和电刷,转子侧安放电枢绕组和换向器。
直流电源的电能通过电刷和换向器进入电枢绕组,产生电枢电流,电枢电流与主磁场相互作用产生转矩,带动负载。
原理图如图1
图1
4功能分解
为了完成助力车在载运目的,首先是主功能,从安全性考虑应使助力车具有测速功能,使其不超最大速度;还应具有载重显示功能,使其不超载。
另外还应具有驱动功能,调控功能,和其他功能等。
5总体方案设计
(1)功能求解
根据功能树中所提出的各分功能,寻求可能的功能载体,形成功能载体形态学矩阵,如下表所示。
根据形态学矩阵可组合出很多方案。
考虑到相容性及最佳配置原则,将各功能载体组合成四个原理解答方案,分别为:
方案1:A1+B2+C1+D2+E1
方案2:A2+B1+C2+D3+E5
方案3:A2+B1+C2+D2+E1
两轮助力车的形态学矩阵
(2)方案评价
1)评价指标及加权系数的确立
本设计从技术,经济,社会性三方面确定了评价指标。
技术指标主要指性能指标,具体可分为主要性能,运行性能,制造性能指标;经济性能分为功能/成本比及制造成本两项指标;社会指标分为外观、人机工程学指标。
考虑其相对重要程度,确定加权系数并建立评价目标树,如下图2所示。
2)专家组评分并决策
专家组评分如下表所示
由于方案3总评价值最高,各评分评价也全部符合要求,故选取方案4位原理解答方案。
方案评价结果
6总体布局设计
根据方案4进行总体布局设计,由于控制与信息传递以及显示部分需根据工程使用设备现场情况单独布置,因此,对该设备而言,总体布局主要是指机械结构部分的布置。
完成布局草图如下图。