简易智能电动车的设计毕业设计
简易智能电动车的设计与制作

简易智能电动车的设计与制作介绍本文档将介绍如何设计和制作一辆简易智能电动车。
智能电动车是一种环保、高效的交通工具,有着越来越广泛的应用。
我们将主要涵盖以下内容: 1. 设计目标与需求 2. 器材与零件的选择 3. 构造与装配过程 4. 控制系统的设计与实现 5. 测试与优化 6. 结论与展望1. 设计目标与需求首先,我们需要明确设计目标与需求,以确保设计满足用户的期望。
以下是一些常见的设计目标和需求: - 轻便:车辆整体重量不超过一定限制,以提高操控性和节能性。
- 高效:电路和电池的设计要尽量提高能量转化和储存效率。
- 安全:车辆需要具备一定的安全措施,如制动系统和防撞装置等。
- 智能化:车辆的控制系统需要具备一定的智能特性,如自动巡航和避障等。
- 成本低廉:设计需要尽量选用经济实惠的材料和零件,以降低生产成本。
2. 器材与零件的选择在设计智能电动车时,我们需要选择适当的器材和零件来满足设计目标和需求。
2.1 电动机选择合适的电动机至关重要,它将提供车辆的动力。
常见的电动机类型包括直流无刷电动机和步进电机。
我们需要根据设计需求选择适合的电动机类型,考虑功率、转速和电流等因素。
2.2 控制系统为了实现智能化功能,我们需要设计一个控制系统。
这个系统将负责监测车辆的状态并做出相应的决策。
控制系统的核心部分是微控制器或单片机。
根据需求选择适合的微控制器,考虑处理能力、接口和编程环境等因素。
2.3 电池和电源管理电池是车辆的能源来源,因此选择适当的电池很重要。
常用的电池类型包括锂电池和铅酸电池。
我们需要根据需求选择适合的电池类型,并设计一个电源管理系统来管理电池的充电和放电过程,以确保电池的寿命和安全。
2.4 传感器与执行器为了实现智能化功能,我们需要选择适当的传感器和执行器。
传感器可以用于检测车辆的状态,如速度、位置和距离等。
执行器可以用于执行某些操作,如制动和转向等。
常用的传感器和执行器包括超声波传感器、红外线传感器和舵机等。
毕业设计论文《智能电动车设计》

摘 要随着微电子和计算机技术的发展,电动车的需求量与日俱增。
智能车(自主移动机器人)是一类通过内部、外部传感器感知外部环境信息和自身状态,在有障碍物的复杂环境中实现面向目标的自主运动,从而完成一定作业功能的机器人系统。
研究智能电动车的控制系统,对提高控制精度和响应速度、节约能源能都具有重要的意义。
该设计所研究的智能电动车系统是以ATMEL 生产的8位单片机AT89C51为处理器,以安装在车顶部的激光管和光敏电阻作为道路识别传感器,以超声波模块作为避障传感器,以接近开关作为金属片检测传感器,以LCD1602液晶作为数据显示器,以BTS7960芯片组成的H 桥电路作为电机驱动,以直流电机作为方向控制器的智能车系统。
在智能电动车的控制上,针对不同的控制对象采取了不同的控制策略:对激光传感器采取分时选通,增强了抗干扰能力;对驱动电机采用PWM 调速,可以使智能车在行驶过程中进行加减速等。
该设计在对智能电动车系统的研究上取得了一定的成果,可以完成系统预定的功能,但是还存在许多不完善之处,需要进一步深入研究。
关键词关键词::智能车智能车;;电机电机;;单片机单片机;;传感器传感器;;AbstractWith microelectronics and computer technology development, the increasing demands of electric. Intelligent vehicle (autonomous mobile robot) is a kind of certain homework function robot system which obtains external environment information and their own state through the internal and external sensors, and realizes object-oriented independent movement in a complex environment. Research of control system, to improve control precision and response speed, energy saving etc all has important significance.The study of this design is such an intelligent vehicle system, which is based on the processor of 8-bit microcontroller AT89C51 produced by ATMEL, whichKey Words: Intelligent car, Motor, MCU, Sensor目 录摘 要 (I)Abstract ......................................................................................................................... I I 1绪论. (1)1.1课题背景与意义 (1)1.2课题的研究现状 (2)1.3课题的研究内容与目标 (3)2智能电动车硬件系统设计 (4)2.1智能电动车控制系统方案 (4)2.2电源系统设计 (5)2.3微控制器模块 (5)2.3.1微控制器介绍 (5)2.3.2主控制器的最小系统电路 (6)2.4单片机外部扩展模块 (7)2.5方向控制模块 (7)2.6循迹模块 (8)2.7金属片探测模块 (9)2.8障碍物检测模块 (9)2.9光源跟踪模块 (10)2.10电机驱动模块 (11)2.10.1驱动电机选择 (11)2.10.2转速控制方法 (11)2.10.3电机驱动电路 (12)2.11显示及声光指示系统 (13)2.11.1显示模块 (13)2.11.2声光指示模块 (13)2.12硬件原理图设计软件介绍 (14)2.13硬件电路PCB板设计 (14)2.14硬件设计中注意的问题 (16)3控制系统的软件设计 (18)3.1软件开发平台介绍 (18)3.2系统程序设计 (19)3.2.1系统总体流程图 (19)3.2.2循迹模块程序设计 (19)3.2.3方向控制模块程序设计 (19)3.2.4金属探测及声光指示模块程序设计 (19)3.2.5障碍物及光源检测模块程序设计 (21)3.2.6电机驱动模块程序设计 (21)3.2.7显示模块程序设计 (21)结论 (22)致谢 (23)参考文献 (24)附录系统总体程序 (25)1 绪论1.1 课题背景与意义在众目期盼之下,“勇气”号和“机遇”号火星车分别在2004年1月3日和2004年1月24日顺利的登陆了火星,这两辆火星车在三个月内完成了所有的既定任务。
毕业设计 智能电动车

目录1 引言 (2)2 智能电动车的原理 (2)3 红外线光控电路 (3)3.1 红外线相关 (3)3.2 继电器 (4)3.3 红外线光控电路的组成 (4)3.4 LM324芯片在具体电路中的应用 (5)4 LM567芯片 (9)4.1 LM567在红外光电探测电路中的应用 (10)4.2 小车电路所需元器件 (14)4.3小车内部电路以及连线 (15)4.4小车电路分析结束语 (15)4.5小车整体性能的调试 (16)5小车前景 (17)结束语 (17)致谢 (17)参考文献 (17)1 引言近年来机器人的智能水平不断提高,并且迅速地改变着人们的生活方式。
人们在不断探讨、改造、认识自然的过程中,制造能替代人劳动的机器一直是人类的梦想。
而机器人在复杂地形中行进时自动避障是一项必不可少也是最基本的功能。
因此,自动避障系统的研发开始显得尤为重要。
避障控制系统是基于自动导引小车,使用传感器感知路线,实现自动识别路线,判断并自动避开障碍,选择正确的行进路线。
自动避障小车就是自动避障机器人中的一类。
自动避障小车可以作为地域探索机器人和紧急抢险机器人的运动系统,让机器人在行进中自动避过障碍物。
2 智能电动车的原理图1 电动车的原理示意图智能小车原理示意图如图1所示,小车的电路基本有六部分组成,包括手动控制电路、无线遥控控制电路、转换开关、继电器、红外线光控电路和小车马达,其中红外线光控电路是小车的核心部件,它在一定意义上体现了小车的智能。
小车的工作过程大致是:小车手动控制电路和无线遥控控制电路通过转换开关将反射物体红外线发射管 红外线光敏管红外线光控电路继电器转换开关小车手动控制电路 小车无线遥控电路M小车马达控制信号传给小车继电器,小车继电器平时处于常闭状态,继电器直接接在小车马达上.而红外线光控电路则直接作用于继电器上,红外线光控电路的探测距离在1.5厘米之内(探测距离可通过可变电阻W进行调节,此电路将在下面介绍)当小车在行使过程中,红外线光控电路的红外线发射管不断的向外发射红外线,不论是手动控制还是无线遥控控制,当小车的前方出现障碍物时,红外线发射管发出的红外线被物体反射回来,被红外线光敏管接受,接受到的信号通过红外线光控电路的四级放大后(此放大电路将在下面介绍到)作用于继电器,使继电器的常闭触点断开,使小车马达断电,实现了小车的避障.3 红外线光控电路3.1 红外线相关红外线是太阳光线中众多不可见光线中的一种,由英国科学家霍胥尔于1800年发现,又称为红外热辐射,他将太阳光用三棱镜分解开,在各种不同颜色的色带位置上放置了温度计,试图测量各种颜色的光的加热效应。
简易智能电动车的设计

简易智能电动车(E题)摘要:本设计对象为一个简易小车的智能控制系统。
该系统以FPGA技术作为核心控制技术,以行为控制作为核心控制策略。
控制决策所需的信息主要来源于光电传感器、金属探测传感器以及超声传感器等传感器。
通过光电传感器获取小车的车速、行驶距离、引导线以及引导性光源等信息;金属探测传感器主要获取轨道上的金属标志信息;超声传感器主要用来探测障碍物的位置。
小车根据以上诸信息“了解”它所处的位置,并根据运动策略做出运动决策。
实验表明,本文所提供的设计方案正确可行,能够达到设计要求。
本设计的主要特色:(1) 控制电路电源和电动机电路电源隔离,信号通过光电耦合器耦合;(2) 采用以FPGA控制脉宽调制(PWM)信号的方式实现了八个档位的车速调节;(3) 基于行为的智能控制策略;关键词:智能电动车FPGAAbstract:This paper describes an approach of designing an intelligent control system for a facility car. In this control system, FPGA chips act as a core hardware surpport, and FPGA technology as a core technology. Based on the signals (information) picked up by sensors such as photoelectrical sensors, metal sensors, and ultrasonic wave sensors, the information about circumstance are “known of” by c ar. On knowing of these pieces of information, the car can infer about actions it will take. This control system is characteristic of its:(1) dual powers supply, which separate motor control circuits system from that of others;(2) control system based on FPGA technology;(3) and intelligent control algorithms based on bahavior.Key words:FPGA/ Facility car /Intelligent control system目录1.简易智能电动车设计方案的比较、论证与选取 (3)1.1 控制方案与控制策略的选取 (3)1.2 信号检测与处理方案的选取 (4)1.2.1 小车移动距离(速度)检测 (4)1.2.2小车移动引导线信号的检测 (4)1.2.3 小车金属路标信号的检测 (4)1.2.4 路障信号的检测 (5)1.2.5 引导性光源信号的检测 (5)1.3 执行部件和显示模块的方案及选取 (5)1.4 小车控制、驱动系统电源的方案及选取 (6)1.5 简易智能小车测控系统的总体方案 (6)2.简易智能小车测控系统的设计 (7)2.1小车的电动机驱动控制模块设计 (7)2.2 信号检测与处理模块的设计 (8)2.2.1小车移动距离(速度)信号的检测与处理模块的设计 (8)2.2.2小车移动引导线信号的检测与处理模块的设计 (8)2.2.3金属探测传感系统的设计 (9)2.2.4障碍物信号的检测和处理系统设计 (9)2.2.5小车运动方向引导光源信号的检测系统设计 (10)2.3 简易智能小车运动控制策略设计 (11)3.实际测试 (12)3.1 测试设备 (13)3.2 测试过程 (13)3.3 测试结果 (13)3.4 测试结论 (14)4.结论 (14)参考文献 (14)1.简易智能电动车设计方案的比较、论证与选取简易智能电动车控制系统主要包括三个模块:小车的行动决策控制模块、信号的检测与处理模块以及小车的执行/显示模块。
简易智能电动车的设计毕业设计

毕业设计题目:简易智能电动车的设计专业机电一体化班级姓名指导教师目录第一部分设计任务与调研 (3)第二部分设计说明 (5)第三部分设计成果 (10)第四部分结束语 (16)第五部分致谢 (17)第六部分参考文献 (18)第一部分设计任务与调研1、毕业设计的主要任务本设计的主要任务为在如图1-1所示的行驶路线图中完成如下任务:①电动车从起跑线出发(车体不得超过起跑线)、沿宽度为2cm的黑色引导线到达B点。
在“直道区”铺设的白纸下沿引导线埋有1~3块宽度为15cm、长度不等的薄铁片。
电动车检测到薄铁片时,立即发出声光指示信息,并实时存储、显示在“直道区”检测到的薄铁片数目。
②电动车到达B点后进入“弯道区”,沿圆弧引导线到达C点(也可脱离圆弧引导线到达C点)。
C点下埋有边长为15cm的正方形薄铁片,要求电动车到达C点检测到薄铁片后在C处停车5秒,停车期间发出断续的声光信息。
③电动车在光源的引导下,通过障碍区进入停车区并到达车库。
电动车必须在两个障碍物之间通过且不得与其接触。
④电动车完成上述任务后立即停车,全程不得超过90秒,行驶时间达到90秒时立即自动停车。
跑图1-1 智能电动车行驶路线示意图2、研究意义智能小车,也就是轮式机器人,最适合在那些人类无法工作的环境中工作,该技术可应用于无人驾驶机动车,无人生产线,仓库,服务机器人等领域。
以下列举了机器人的一些应用,所有这些用途正逐步渗入到工业和社会的各个层面。
在产品检测方面,对零部件、线路板及其它类似产品的检测是机器人比较常见的应用。
一般来说,监测系统中还集成有其它一些设备,他们是视觉系统、X 射线装置、超声波探测仪或其它类似仪器。
在瓦斯、地压检测方面,瓦斯和冲击地压是井下作业中的两个不安全的自然因素,一旦发生突然事故,是相当危险和严重的。
但瓦斯和冲击地压在形成突发事故前,都会表现出种种迹象,如岩石破裂等。
采用带有专用新型传感器的移动式机器人连续监视采矿状态,以便及早发现事故突发先兆,采取相应的预防措施。
基于单片机的智能电动小车设计毕业设计
目录1绪论 (1)1.1智能小车设计背景 (1)1.2智能小车的意义 (1)2智能电动小车的总体设计方案 (3)2.1总体方案论证与比较 (3)2.2探测轨迹模块 (4)2.3检测金属铁片模块 (5)2.4 避障模块 (6)2.5寻找光源模块 (6)2.6显示模块 (7)2.7测量里程模块 (7)2.8 电动机驱动模块 (8)3系统的硬件电路设计 (9)3.1检测轨迹电路 (9)3.2 检测金属片电路 (11)3.3 检测障碍物电路 (11)3.4检测光源电路 (16)3.5显示电路 (16)3.6测量里程电路 (18)3.7电动机驱动电路 (19)4 系统的软件设计 (21)4.1 程序设计 (21)4.2主程序设计 (21)4.3 探测金属程序设计 (23)4.4 测量里程程序设计 (23)4.5躲避障碍物子程序设计 (24)结束语 (25)参考文献 (26)附录A 源程序 (27)附录B 总硬件图 (33)致谢 (34)毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:摘要80C51单片机是一款八位单片机,他的易用性和多功能性受到了广大使用者的好评。
简易智能电动车的设计与制作

摘要本课题设计制作了一款具有简易智能判断功能的小车,它具有自动寻迹功能(在一定范围内行驶),设计了电路图,编制了软件并完成安装、调试,形成了样机。
作品以两电动机为主驱动,通过光电三极管来采集信息,送入主控单元AT89S52单片机,处理数据后完成相应动作,以达到自身控制。
电机驱动电路采用高电压,高电流,四通道驱动的达林顿管原理的三极管组合。
其中,黑带检测采用红外线接收三极管完成;将信号送单片机处理判别方向。
由控制单元处理数据后完成相应动作,实现了无人控制即可完成一系列动作,相当于简易机器人。
通过本课题的设计,使我们学习了单片机技术的中断技术,更好的掌握了单片机的核心内容。
又巩固了模拟电路中的功率放大电路知识,把实践和理论更好的结合。
关键字:单片机智能控制光电信号收发寻迹行驶AbstractThis topic-based group designed manufactures one section to have the intelligent judgment function car, the car has evades automatically bonds the function; Seeks the mark (Moving in a certain range) function: May study the embedded control as the university student the powerful application example. The work take two electric motors as the focus actuation, gathers the information through the electro-optical sensing component, sends in the master control unit AT89S52 monolithic integrated circuit, after processing the data, completes the corresponding movement, achieves own control. The motor-driven electric circuit uses the high voltage, the high electric current, four channels actuate Darington tube. And, the blanking bar examination uses the photosensitive triode to complete; Delivers the monolithic integrated circuit processing distinction direction the signal. Through this topic's design, caused us to study in the monolithic integrated circuit technology interrupt technology, better has grasped monolithic integrated circuit's central content. Causes us the theoretical knowledge which studies to apply in the practice, caused the practice and the theory obtained a better union.key words: Monolithic integrated circuit intelligent controlelectro-optic signal receiving and dispatching seeks the mark travel第一章单片机及其应用一、什么是单片机所谓单片机就是将计算机的基本部件微型化并集成到一块芯片上,具备独特功能的微型计算机。
简易智能电动车的设计与制作
简易智能电动车的设计与制作随着全球能源问题的日益严重,越来越多的人开始关注环保交通工具的研发和应用,电动车也成为了发展趋势之一。
基于此,本文旨在设计一款简易智能电动车,方便市民进行短途出行。
一、设计思路1.车身设计本款电动车的车身采用紧凑型设计,身长1.5米,身高1.3米,宽度0.7米,方便停放在狭窄的路边,车身前半部分采用小圆形设计,减小风阻,后半部分为方形设计,增加装载空间。
2.动力系统本款电动车采用电机驱动,安装在车后轮上。
驱动电机采用直流电机,功率为500W,电池组采用三节12V蓄电池串联,总电压为36V。
为避免过充与过放,电池组安装过程中将安装过充保护电路和过放保护电路。
3.控制系统本款电动车采用单片机控制系统。
主控制器采用STM32F103 MCU,支持扩展模块的接口,采用CAN总线,可以与其他电控模块进行数据通讯,能实现电机转速控制、方向控制等功能,同时也能实现智能电池管理,如状态预报、充电管理等。
4.外围设备本款电动车的外围设备包括OLED显示屏、GPS 导航仪和蓝牙模块。
OLED显示屏配备车速显示、剩余电量显示、车况信息显示、故障提示等,GPS导航仪可实现车辆导航、路线规划等,蓝牙模块支持蓝牙音乐等外部设备接入,丰富车辆使用性能。
二、实现步骤1.车架制作选用高强度较轻的铝合金材质,现代工艺制作车身,使车身结构更加坚固,且良好稳定性可以促进马路上行驶的舒适度和安全性。
2.电机及电池组选购考虑到本款电动车主要用于城市日常短途行驶,采用功率为500W的直流电机,轻便、节能,总电压36V的蓄电池,可以满足车辆长距离移动的需求,并且减少中途充电的压力。
3.控制系统的设计在软件角度上,针对单片机的选用,可以利用c语言编程实现模块式控制,除电机驱动外的其他设备的控制、信息反馈等功能,也可以通过单片机与其他控制器进行数据交换。
这样不仅可充分利用多种功能模块的优势,还可实现方便、灵活,气缸的控制与协作。
简易智能电动车 毕业设计

毕业设计(论文)中文摘要简易智能电动车摘要:本小车以MSP超低功耗单片机系列MSP430F149和MSP430FE425为核心,完成寻迹、检测金属、避障、寻光、测速等功能。
在机械结构上,对普通的小车作了改进,即用一个万用轮来代替两个前轮,使小车的转向更加灵敏。
采用PWM 驱动芯片控制电机,红外传感器检测黑线,金属传感器检测铁片,光敏器件检测光强,红外LED和一体化接收头来避障。
基于可靠的硬件设计和稳定的软件算法,实现题目要求。
而且附加实现显示起跑距离、行驶时间、检测金属数目等扩展功能。
关键词:MSP430 寻迹检测金属避障寻光毕业设计(论文)外文摘要Title: Simple Intelligent CarAbstract: This design is controlled with the MCU(MSP430F149,MSP430FE425) to complete the function of finding trace, detecting medal, avoiding barrier, tending to light and measure speed. By using infrared sensor to locate the trace、photoelectricity sense to measure the light、metal sensor to detect the metal and ultrasonic wave sensor to avoid the barrier. Based on the reliable hardware and software designing,this design is well fulfilled. In addition, such extended functions as measuring thedistance and recording the running-time are completed well. On the level of machine structure, we use a perfect wheel to make the car turning more convenience.Key words:MSP430 find trace detect medal avoid barrier and tend to light目录1 引言 (4)2 系统设计 (4)2.1 设计要求 (4)2.1.1 基本要求 (4)2.1.2发挥部分 (4)2.2方案论证与比较 (5)2.2.1电机驱动方案的选择与论证 (5)2.2.2路面寻线模块 (5)2.2.3金属检测模块 (5)2.2.4寻光模块 (5)2.2.5避障模块 (5)3硬件电路设计 (6)3.1 主控制模块 (6)3.2 电机驱动模块 (8)3.3 寻迹模块 (9)3.4 金属检测模块 (11)3.5 寻光避障模块 (11)3.6 测距和显示模块 (12)3.7电源模块 (13)4软件设计 (14)4.1 寻迹算法 (14)4.2 寻光,避障算法 (16)4.3串口通信 (20)5.系统测试 (22)5.1测试用仪表: (22)5.2测试数据: (22)结论 (23)致谢 (23)参考文献 (23)附录 (24)附件1:使用TI芯片 (24)附件2:元器件清单 (24)附件3:实物及PCB 图片 (25)1 引言随着素质教育的越来越被重视,很多学校都把制作智能小车作为首选课题,智能小车有趣生动并且还牵扯到机械结构、电子基础、传感器原理、自动控制、单片机、编程等诸多学科知识,学生通过动手实践能大大提高解决实际问题的能力,而且智能小车还是一个很好的硬件平台,只要增加一些控制电路就能完成循迹小车,机器人等课题。
电动车设计毕业设计

第一章概述1.1设计的主要目的和意义此次设计的目的是掌握产品造型的设计,包括材料、尺寸的合理选择,灵活运用制作技术、形态表达语言,根据人机工程学和美学来设计电动自行车的尺寸和颜色。
矚慫润厲钐瘗睞枥庑赖。
根据同类型产品的类比和设计,力学分析,考虑人机工程学中的人体尺寸和人的舒适程度来综合设计电动自行车的尺寸。
聞創沟燴鐺險爱氇谴净。
设计的目的其实包括好几个层面,第一,加工工艺的了解;第二,进一步提出不同材质的优化组合课题;第三,探究材料与产品结构、功能的有机联系;第四,熟悉产品结构连接件的运用;第五,产品形态讨论;第六,寻求产品设计制作的个性化等等。
残骛楼諍锩瀨濟溆塹籟。
通过这半年的设计,我们很好的复习了已经学过的课程,并对部分材料的应用有了一定了解,在颜色搭配上也有了一定的学习,而且能熟练操作制图软件和办公软件。
对我们以后在工作上有很大的帮助。
酽锕极額閉镇桧猪訣锥。
1.2国内外电动自行车的发展情况1.2.1国外及我国台湾地区电动自行车的发展情况为创造市场需要,适合老弱妇孺各种年龄层骑乘自行车,国外厂商多年前即开始研制辅助驱动自行车并且在新电池和驱动机械马达技术成熟发展之下,电动自行车应运而生。
海外发展较早的要数日本、奥利地、德国、台湾等国家和地区,近几年美国发展也比较快。
国外的电动自行车主要是作为一种轻松代步及休闲健身工具。
例如,在大型的停车场、超市和旅游区里使用。
从1994到1999年6年时间中,全球电动自行车数量,从3.6万辆剧增1600万辆,如按2%算,电动车需要量会在30万辆以上。
同时,东南亚、中东、印度增到50万辆,而在2000年,仅日本就需要50万辆。
总体来说,电动自行车在全球的潜在市场很大,并呈上升趋势。
彈贸摄尔霁毙攬砖卤庑。
日本电动车的生产及技术都占世界领先地位,商品化的电动自行车由日本雅马哈公司率先于1994年推出,并随着本田、三洋、松下等知名公司的参与,生产规模日益放大。
但日本对电动自行车的使用管理上采取了严格限制,日本只许智能型电动自行车上路,并对智能型电动自行车的要求制定了很严格规定。
电子设计毕业设计-简易智能电动车论文资料-3

E9简易智能电动车设计报告中国海洋大学郭长玉许林林闫芳芳摘要本智能小车采用凌阳单片机SPCE061A作为控制器,利用感光、感铁及红外接近传感器来感知外界信号的变化,实现了小车能够沿着黑线走,并且越过障碍物通过光源的引导顺利的达车库,途中记录了遇到的铁块数目并且显示出来。
一、方安论证与比较1.方案比较方案一:用继电器来控制电机的停与转,但是转速不可调。
用红外传感器实现避障,红外传感器发出了红外光,障碍物反射光,距离障碍物远近不同,传感器输出的信号不同,将信号送入单片机进行A/D转换,控制小车的左传、右转。
方案二:用单片机的PWM信号控制电机的转速,即可实现电机转弯,用红外接近传感器实现避障,当距离障碍物10cm时,红外接近传感器由低电平变为高电平。
由单片机控制小车转弯,用磁接近开关检测铁片,有铁片即使开关由常开变常闭,单片机进行声光报警,有光敏三极管检测200w光源。
有光敏电阻来检测白纸上的黑线,是小车顺黑线运动。
2.方案的确定比较两种方案,运用方案一,信号的处理比较复杂,不容易实现对小车的控制。
方案二运用了比较先进的传感器,使问题的处理变得相对简单。
通过比较我们最终选用了方案二,并基本完成了题目设计要求二、工作原理、框图及电路设计1、工作原理利用光敏电阻来感知黑线,能够使小车沿着黑线的轨迹走;利用感金属的接近开关来感知铁块,使小车遇到铁块时发出信号;当碰到障碍物时,光电开关由低电平变为高电平;利用光敏三极管来感知光源,引导小车进入车库。
2、电路方框图感金属接近传感器接近传感器单片机SPCE061A声音电机运转3、单元电路设计及分析(1)光敏电阻部分利用光敏电阻可以感知颜色的深浅,并根据颜色的深浅的不同而输出不同的电压信号,从而使小车区分白纸和黑线。
具体实现电路如下所示图1。
图1 图2(2)感金属的接近传感器和红外接近传感器部分利用感金属的接近传感器可以检测到铁皮向单片机发送出信号,使单片机可以记录下铁块的数目;在小车的前、左、右方各放置一红外接近传感器,当小车遇到障碍物时,可以由传感器向单片机发出电压信号,使小车能够根据信号的不同做出相应的反应,从而实现避开障碍物。
基于单片机的简易智能电动车设计课程设计

《单片机应用技术》课程设计报告题目:基于单片机的简易智能电动车设计课程设计任务书设计名称:基于单片机的简易智能电动车设计基于单片机的智能电动车设计摘要智能作为现代的新发明,是以后的发展方向,他可以按照预先设定的模式在一个环境里自动的运作,不需要人为的管理,可应用于科学勘探等等的用途。
智能电动车就是其中的一个体现。
本设计以单片机作为主控芯片,控制两个步进电机的正反转,实现了小车的不同方向运动。
利用红外对管做成的红外传感器来检测路面信息,完成了小车的巡线功能。
避障与寻光均采用红外对管来实现。
采用LCD1602液晶显示屏来显示时间与路程等信息。
关键词: 巡线避障寻光显示AbstractThe new smart as a modern invention, is the future direction of development, he can follow the pattern set in advance in an environment where the operation automatically, without human management, etc. can be applied to the use of scientific exploration. Smart electric car is one of expression.The design of a microcontroller as the master chip, the two stepper motor reversing control and achieve the car's different direction. Using Infrared Emitting Diode made of infrared sensors to detect road surface information, completed the car's transmission line functions. Obstacle avoidance and infrared search light tubes are used to achieve. By LCD1602 LCD to display information such as time and distance.Keyword: Search online Avoid object Search light Show Information目录一总体概括 (5)二方案的论证与比较 (5)2.1 主控芯片的选择 (5)2.2 智能巡线设备的选择 (5)2.3 显示设备的选择 (6)2.4 声光信号设备的选择 (6)三电路设计 (6)3.1单元电路设计 (6)3.1.1 寻光电路的设计 (6)3.1.2 红外检测电路设计 (7)3.1.3 金属探测电路的设计 (8)3.2 电机驱动电路设计 (9)四软件设计 (10)4.1主程序流程图 (10)五调试结果 (11)六参考文献 (12)七附录 (13)八总结与体会 (23)第一章总体概括具体的系统方框图如下所示:图1 系统框图第二章方案的论证与比较2.1 主控芯片的选择方案一:采用单个单片机作为主控芯片。
毕业论文电动车总体设计【范本模板】

本科毕业设计题目:某型电动车总体设计学院: 汽车与交通工程学院专业:学号:学生姓名:指导教师:日期: 二○一五年六月摘要电动车(简称EV)是由车载动力电池作为能量源的车辆,可实现车辆零污染排放。
随着环境日趋恶化,我们迫切需要使用环境友好型车辆,而本次设计的电动车正好拟合这个趋势,所以这一款电动车具有很强的现实意义。
本次毕业设计主要是对电动车的车架设计和总体布置。
根据本款电动车的实际工况和参考现有电动的一些参数,按照动力性能要求,运用汽车理论、汽车设计等相关知识计算,选出各个部分需要的零部件和总成.根据各类零件和总成的参数,再加上对车辆行驶性能部分的要求,来完成车架框架部分的设计。
然后在将每个部分按照相对位置关系,布置在车架上,完成车架的装配。
最后,根据现有的计算的结果,完成对车辆的外部装饰和布置.通过已知计算和选取得来的各个零部件和总成的相关尺寸,利用制图软件CAD进行相关装配图、布置图、零件图形的绘制,得到理论上合为5张A1的图纸,该电动车基本满足要求。
关键词:电动车;总体布置;车架设计AbstractElectric vehicles (referred to EV)is a vehicle-mounted battery as an energy source. vehicle, which can achieve zero emissions vehicles。
With the deterioration of the environment, we urgently need to use environment—friendly vehicles, and electric vehicles is designed just to fit this trend,so that an electric car has a strong practical significance.The graduation project is mainly for electric vehicle frame design and overall layout。
智能电动小车设计方案

智能电动小车设计方案
设计目标:设计一个智能电动小车,具有定位导航、避障、智能充电等功能,适用于室内外使用。
1. 外观设计:
- 小车应具有时尚简约的外观设计,外壳选用轻量化材料,
如塑料或铝合金,以便提高小车的机动性和携带性;
2. 电机与驱动系统:
- 选择高效能的无刷直流电机,以提供强劲的动力;
- 配备电机驱动电路,能够实现精确的速度和方向控制;
- 电池采用锂电池,以提供持久的续航能力;
- 设备电路保护系统,以确保小车的安全使用;
3. 定位导航系统:
- 集成全球定位系统(GPS)和惯性导航系统,以提供准确
的定位和导航功能;
- 配备地图应用程序,以可视化显示小车的位置和路线;
- 具备自主导航功能,能够设置目的地并自动规划最优路径;
4. 避障系统:
- 配备超声波或红外传感器,用于检测前方障碍物;
- 使用避障算法,以决策如何避免障碍物;
- 配备声光报警系统,以提醒用户注意避障情况;
5. 智能充电系统:
- 小车底部装备感应线圈,用于与充电基站进行无线充电;
- 设备充电管理系统,能够智能地控制充电过程,提高充电
效率;
- 具备自动寻找充电基站的功能,以方便小车无需人工介入
即可完成充电;
6. 控制系统:
- 配备中央处理器,用于处理传感器数据和执行控制算法;
- 配备无线通信模块,以便与其他智能设备交互;
- 集成操作界面,通过手机或平板电脑实现远程控制和监控;
通过以上设计方案,能够实现智能电动小车的定位导航、避障、智能充电等功能,提高小车的便携性和智能性,适用于多种应用场景。
基于单片机简易智能电动车设计报告
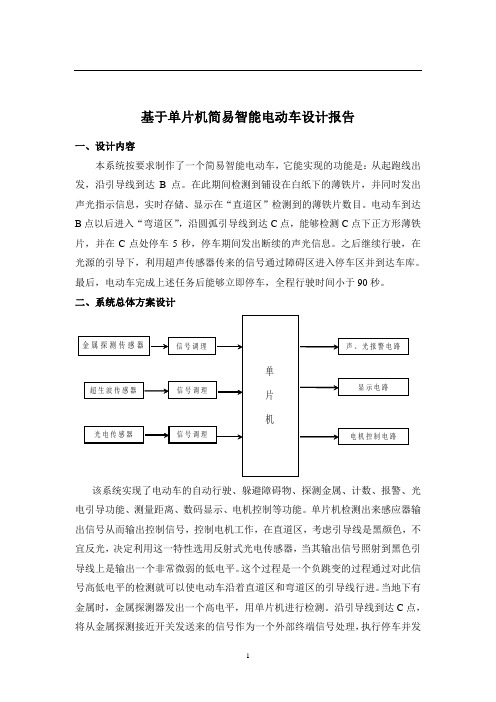
基于单片机简易智能电动车设计报告一、设计内容本系统按要求制作了一个简易智能电动车,它能实现的功能是:从起跑线出发,沿引导线到达B点。
在此期间检测到铺设在白纸下的薄铁片,并同时发出声光指示信息,实时存储、显示在“直道区”检测到的薄铁片数目。
电动车到达B点以后进入“弯道区”,沿圆弧引导线到达C点,能够检测C点下正方形薄铁片,并在C点处停车5秒,停车期间发出断续的声光信息。
之后继续行驶,在光源的引导下,利用超声传感器传来的信号通过障碍区进入停车区并到达车库。
最后,电动车完成上述任务后能够立即停车,全程行驶时间小于90秒。
二、系统总体方案设计该系统实现了电动车的自动行驶、躲避障碍物、探测金属、计数、报警、光电引导功能、测量距离、数码显示、电机控制等功能。
单片机检测出来感应器输出信号从而输出控制信号,控制电机工作,在直道区,考虑引导线是黑颜色,不宜反光,决定利用这一特性选用反射式光电传感器,当其输出信号照射到黑色引导线上是输出一个非常微弱的低电平。
这个过程是一个负跳变的过程通过对此信号高低电平的检测就可以使电动车沿着直道区和弯道区的引导线行进。
当地下有金属时,金属探测器发出一个高电平,用单片机进行检测。
沿引导线到达C点,将从金属探测接近开关发送来的信号作为一个外部终端信号处理,执行停车并发出断续的声光信号,同时进行5秒定时计数工作。
三、系统硬件设计根据系统要求,硬件电路包括:电源部分,单片机最小系统、超声波测距电路、金属探测电路、光电传感器、黑白探测传感器、电机控制电路、显示电路,电动车整体图示如下:1)电源部分设计随着微电子技术的不断进步,系统电源的设计在单片机应用系统设计中显得越来越重要,它对单片机系统是否正常工作起着至关重要的作用。
由于电动车本身为六节1.5V电池供电,根据系统要求,选择7805稳压管将直流9V电压转成5V输出。
7805直流稳压电路图:Vi VoutLM7805C1C22)单片机最小系统利用单片机最小系统实验电路板完成传感器与电动机的连接和控制。
电子设计大赛智能小车设计报告

简易智能电动车设计报告小组成员:日期:摘要本设计以STC89C52单片机为控制核心。
经光敏电阻和红外对射完成循迹,寻光以及躲避障碍物,测距的检测,停车,控制时间等,经比较器LM393进入单片机。
单片机通过内部程序完成对小车的控制,从而完成相关要求。
关键字:控制;检测;红外对射;智能小车;AbstractThe design for STC89C52 core control. The photosensitive resistor and infrared to radio complete tracking, search light and avoid obstacles, ranging detection, parking, control the time, by the comparator LM393 into the single chip microcomputer. SCM through internal procedures performed on the control car, thereby completing the relevant requirements.Keywords: control; testing; infrared; smart car;目录1 方案设定 02 各模块的选择方案 (1)2.1电源模块选择方案 (1)2.2系统控制模块方案 (1)2.3红外对射模块方案 (1)2.4恒流源模块 (2)2.5比较器转换模块 (2)3 系统硬件设计 (3)3.1电源电路设计 (3)3.2恒流源电路设计 (4)3.3电机驱动模块 (5)3.4循迹检测设计 (5)3.5测距检测设计 (6)3.6避障检测设计 (6)4 系统软件设计 (7)5 系统调试 (9)6 结论 (10)7 参考文献 (11)1 方案设定根据以上参赛图以及本次比赛的相关要求,我们小组设定了一下方案。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
毕业设计题目:简易智能电动车的设计专业机电一体化班级姓名指导教师目录第一部分设计任务与调研 (3)第二部分设计说明 (5)第三部分设计成果 (10)第四部分结束语 (16)第五部分致谢 (17)第六部分参考文献 (18)第一部分设计任务与调研1、毕业设计的主要任务本设计的主要任务为在如图1-1所示的行驶路线图中完成如下任务:①电动车从起跑线出发(车体不得超过起跑线)、沿宽度为2cm的黑色引导线到达B点。
在“直道区”铺设的白纸下沿引导线埋有1~3块宽度为15cm、长度不等的薄铁片。
电动车检测到薄铁片时,立即发出声光指示信息,并实时存储、显示在“直道区”检测到的薄铁片数目。
②电动车到达B点后进入“弯道区”,沿圆弧引导线到达C点(也可脱离圆弧引导线到达C点)。
C点下埋有边长为15cm的正方形薄铁片,要求电动车到达C点检测到薄铁片后在C处停车5秒,停车期间发出断续的声光信息。
③电动车在光源的引导下,通过障碍区进入停车区并到达车库。
电动车必须在两个障碍物之间通过且不得与其接触。
④电动车完成上述任务后立即停车,全程不得超过90秒,行驶时间达到90秒时立即自动停车。
跑图1-1 智能电动车行驶路线示意图2、研究意义智能小车,也就是轮式机器人,最适合在那些人类无法工作的环境中工作,该技术可应用于无人驾驶机动车,无人生产线,仓库,服务机器人等领域。
以下列举了机器人的一些应用,所有这些用途正逐步渗入到工业和社会的各个层面。
在产品检测方面,对零部件、线路板及其它类似产品的检测是机器人比较常见的应用。
一般来说,监测系统中还集成有其它一些设备,他们是视觉系统、X 射线装置、超声波探测仪或其它类似仪器。
在瓦斯、地压检测方面,瓦斯和冲击地压是井下作业中的两个不安全的自然因素,一旦发生突然事故,是相当危险和严重的。
但瓦斯和冲击地压在形成突发事故前,都会表现出种种迹象,如岩石破裂等。
采用带有专用新型传感器的移动式机器人连续监视采矿状态,以便及早发现事故突发先兆,采取相应的预防措施。
在智能轮椅领域,随着社会的发展和人类文明程度的提高,人们特别是残疾人愈来愈需要运用现代高新科技技术来改善他们的生活质量和生活自由度。
智能轮椅主要有口令识别与语音合成、机器人自动定位、动态随机避障、多传感器信息融合、实时自适应导航控制功能。
用于帮助残障人行走。
在危险环境下,机器人非常适合在危险的环境中使用。
在这些险恶的环境下工作,人类必须采取严密的保护措施。
而机器人可以进入或穿过这些危险区域进行维护和探测工作,而且不需要得到像对待人一样的保护。
在智能车辆领域,智能小车自动行驶功能的研究将有助于智能车辆的研究。
特别能够对人类的汽车交通带来巨大的影响,在改进道路交通安全方面提供了新的解决途径。
汽车交通是世界上交通事故发生最多的交通工具,而对于避障智能小车而言,小车在遇到人或者其他障碍物时,可发出声光警告提前预警,提醒司机,从而减少交通事故的发生。
因此研究智能小车有利于减少交通事故的发生。
对于探索型智能小车而言,它可以代替人们在恶劣的环境下执行任务。
智能小车在探索未知的事物,特别是对于探索太空其他星球而言,智能小车具备有人类不具备的优势:智能小车适应环境能力非常强,可以在恶劣的环境下工作,如在无氧,高温,低温,高压,强辐射等恶劣的环境下。
这是人类无法适从的。
所以研究智能小车是很有必要的。
当然要使智能小车更完美就需要人类制造更先进传感器,制造出更先进的处理器,编写更合理的程序,这对我们来说是一个挑战。
第二部分设计说明1、整体方案设计本设计为简易智能电动车,包括单片机最小系统、红外避障模块、红外循迹模块、寻光模块、电机驱动模块、电源模块,声光报警模块。
小车能根据传感器采集到的信号经单片机编程处理后,从而实现对小车的智能控制。
系统整体框图如图2-1所示。
图2-1 系统总体框图2、方案选择与电路设计2.1 线路跟踪电路方案一:采用CCD单色摄像头,配计算机主板及图像采集卡。
对白背景下,黑线的识别,目前做的比较成熟,效果相当好。
但成本高,很难找到合适的载体。
方案二:采用颜色传感器。
目前颜色传感器的应用,越来越广泛,效果也可以。
但几百元的价格及相对复杂的处理电路,并且还需要光源,所以也不是一个很好的选择。
方案三:采用一左一右两个红外发射接收对管。
该传感器不但价格便宜,容易购买,而且处理电路(如图2-2所示),简单易行,实际使用效果很好,能很顺利地引导小车到达C点。
在该电路中,加比较器LM311的目的,是使模拟量转化为开关量,便于处理。
为使发射有一定的功率,发射回路要求不小于20mA的电流。
根据 mA R I 2017.15>-=,故可选择R1=150Ω。
启动时,小车跨骑在黑线上。
两个红外发射接收对管,分别安装在黑线的两侧的白色区域,输出为低电压,当走偏,位于黑线上时,输出为高电压。
因黑线较窄(2cm ),为及时调整车的方向,选择比较器的阀值为 2.5v ,即黑白相间的位置,即开始调整。
实验表明,效果较理想图2-2 红外发射接收对管处理电路2.2 避障电路方案一:采用激光传感器测距。
能非常准确地测出小车与障碍物的距离,但价格也高,处理复杂,不符合我们的要求。
方案二:采用超声传感器。
进口的超声传感器,换能器薄,并且带处理电路,输出与距离成比例的模拟信号,通过AD 转换,可获得距离信息,价格贵。
也有一些较简单的超声传感器及处理电路,能输出开关量信息,价格也不贵,是一个好的选择,但由于没买到现成的处理电路,平常又没有做过这种电路,时间紧,故未采用。
方案三:采用左右两个红外传感器。
红外传感器,是目前使用比较普遍的一种避障传感器,其处理电路如图2-3所示,通过调节R23、R24两个电位器,可调节两个红外传感器的检测距离为10—80cm ,开关量输出(TTL 电平),简单、可靠。
我们采用这种电路,能可靠地检测左前方、右前方、前方的障碍情况,为成功避障提供了保证。
D9图2-3红外发射及接收处理电路2.3 光源检测电路为了检测光线的强弱,我们在小车左前方、右前方加了2只光敏传感器,即光敏电阻。
电路如图2-4所示。
光敏传感器根据照射在它上面的光线的强弱,阻值发生变化,输出电压随之变化,通过ADC0809后,得到与光强相对应的数字量,从而引导小车,向光源靠近。
不同型号的光敏电阻,暗电阻及亮电阻差别较大,需根据不同参数的光敏电阻,选用不同大小的分压电阻。
+5v04图2-4光源检测电路2.4 电机驱动电路电动小车的本身自带的换向及驱动电路,相当粗糙,电机的特性也很不好,不能调速。
电压低了,速度慢,驱动力矩小,走不动;电压高时(刚换上电池时),速度又很快,难以调整。
在这上面,花费了不少的时间,效果很不好。
最后,决定对小车的电机及驱动电路,进行了更换。
后轮采用了一对减速直流电机,其驱动电路如图2-8所示。
采用PWM控制,可较方便的对电机进行调速。
+-图2-5电机驱动电路3、软件设计3.1 软件所实现的功能①路线跟踪②障碍检测③寻找光源④金属探测,数目存储、显示⑤运行时间显示⑥起跑线与金属铁片中心点间的距离计算与显示3.2 软件流程系统的主程序流程框图如图2-6所示。
图2-6 系统的主程序流程框图第三部分设计成果程序清单#include <reg52.h>#define uchar unsigned char#define uint unsigned int/***********************控制使能端调速************************/sbit en1=P1^4;sbit en2=P1^5;/***********************电机输入控制端************************/sbit in1=P1^0;sbit in2=P1^1;sbit in3=P1^2;sbit in4=P1^3;/***********************报警控制端************************/sbit P16=P1^6; //光警报sbit P17=P1^7; //声音警报uchar temp3,temp0,temp2;uint t;void dmot(); //直走void lmot(); //左拐void rmot(); //右拐void tmot(); //后退void smot(); //停止void xgt(); //寻光调试void bzt(); //避障调试void xjt(); //循迹调试void init() //初始化函数{P1=0X7F;P2=0XFF;P0=0XFF;en1=0;en2=0;P3=0XFF;temp0=P3;/*******************************定时器初始化********************************/TMOD=0X01; //设置定时器0为工作方式1 TH0=(65536-46080)/256; //装初值TL0=(65536-46080)%256;EA=1; //开总中断ET0=1; //开定时器0中断TR0=1; //启动定时器0}void delay(uint z) //延时调速函数{uint x;for(x=z;x>0;x--);}void main() //主函数{init();while(1){P16=1; //灯灭P17=0; //声音关if(t<2400){P16=1; //灯灭P17=0; //声音关if(P3!=0XF8){xgt(); //寻光调试}else{if(P2!=0xff){bzt(); //避障调试}else{xjt(); //循迹调试}}}elsesmot();}}void dmot() //直进走程序{en1=1;en2=1;in1=0;in2=1;in3=0;in4=1;delay(150);en1=0;en2=0;delay(150);}void lmot() //前左拐{en1=1;en2=0;in1=0;in2=1;in3=0;in4=1;delay(300);en1=0;en2=0;delay(300);}void rmot() //前右拐{en1=0;en2=1;in1=0;in2=1;in3=0;in4=1;delay(300);en1=0;en2=0;delay(300);}void tmot() //后退{en1=1;en2=1;in1=1;in2=0;in3=1;in4=0;delay(300);en1=0;en2=0;delay(300);}void smot() //停{en1=0;en2=0;}void xgt() //寻光调试{temp3=P3;switch(temp3){case 0xf9:rmot();break;case 0xfa:dmot();break;case 0xfb:rmot();break;case 0xfc:lmot();break;case 0xfe:lmot();break;case 0xff:smot();break;}}void bzt() //避障调试{P16=0; //灯亮P17=1; //警报temp2=P2;switch(temp2){case 0xff:dmot();break;case 0xfb:rmot();break;case 0xfe:lmot();break;case 0xf9:rmot();break;case 0xfc:lmot();break;case 0xfd:lmot();break;case 0xf8:tmot();break;case 0xfa:tmot();break;}}void xjt() //循迹调试{temp0=P0;switch(temp0){case 0xe0:dmot();break;case 0xe4:dmot();break;case 0xe8:lmot();break;case 0xec:lmot();break;case 0xf0:lmot();break;case 0xf8:lmot();break;case 0xe6:rmot();break;case 0xe2:rmot();break;case 0xe1:rmot();break;case 0xe3:rmot();break;case 0xfc:lmot();break;case 0xe7:rmot();break;case 0xfe:lmot();break;case 0xef:rmot();break;case 0xee:tmot();break;}}void exter0() interrupt 1{TH0=(65536-46080)/256;TL0=(65536-46080)%256;t++;第四部分结束语本设计系统以单片机AT89C52芯片为核心控制,用各种传感器来进行循迹,探测金属、障碍物和光源。