葫芦科营养钵苗单人操作嫁接机器人设计与试验
接机平台苗木输送系统的设计

摘要目前在蔬菜种植中,由于营养钵育苗在移栽时对幼苗无损伤,所以有取代传统穴盘育苗的趋势。
为了满足营养钵育苗日益普遍的现状,研制新型嫁接机成为现在的一个热门课题。
本次设计的自动嫁接机针对的是采用营养钵育苗的葫芦科植物,实现了砧木苗在营养钵内无需拔苗即可直接的操作,有助于嫁接以后苗的恢复,在生产中具有较高的使用价值。
本次毕业设计是葫芦科植物自动嫁接机的苗木传输系统及平台。
通过分析原有各种嫁接机,我们决定选取传感器配合带式运输机作为苗木传输系统。
首先对嫁接机及其苗木传输系统和胶带输送机作了简单的概述;接着分析了带式输送机的选型原则及计算方法;然后根据这些设计准则与计算选型方法按照给定参数要求进行选型设计;接着对所选择的输送机各主要零部件进行了校核。
普通型带式输送机由六个主要部件组成:传动装置,机尾和导回装置,中部机架,拉紧装置以及胶带。
简单的说明了输送机的安装与维护。
最后说明了传感器的选择,平台的设计。
关键词:嫁接机;苗木传输系统;平台;带式输送机;选型设计;主要部件AbstractBecause the bowl seeding has no harm to the stock when transplanted, therefore it is used widely and tends to replace the hole seeding. In order to apply to the current increasing numbers for nutritional bowl seeding of vegetables, the development of new Grafting automatic machine now become a hot topic. The Grafting automatic machine is the cucurbitaceous vegetables which seedling in nutritional bowl.. It solves a difficult problem in vegetables’ grafting., therefore, has high value for use in vegetable production.The graduation project is the transmission system of grafting automatic machine and platform design. After all of the original graft machine, we decided to select the sensor with a belt conveyor as seedlings transmission system. At first, it is introduction about the grafting automatic machine, seedlings transmission system and the belt conveyor. After that the belt conveyor abase on the principle is designed. Then, it is checking computations about main component parts. The ordinary belt conveyor consists of six main parts: Drive Unit, Jib or Delivery End, Tail Ender Return End, Intermediate Structure, Loop Take-Up and Belt. At last, it is explanation about fix and safeguard of the belt conveyor.Keyword: Grafting automatic machine, seedlings transmission system , belt conveyor; Lectotype Design, main parts目录摘要 (I)Abstract (II)目录 (III)第一章引言 (1)1.1 课题目的意义 (1)1.2 葫芦科嫁接机的发展现状 (1)1.3 苗木传输系统的研究现状 (3)1.4 带式输送机的概述 (3)1.4.1 带式输送机的应用 (3)1.4.2 带式输送机的分类 (4)1.4.3 各式输送机的特点 (4)1.4.4 带式运输机的发展现状 (5)1.4.5 带式运输机的工作原理 (6)1.4.6 带式运输机的机构和布置形式 (8)1.5 传感器简介 (10)第二章带式输送机设计 (11)2.1带式输送机的设计计算 (11)2.1.1 已知原始数据及工作条件 (11)2.1.2 计算步骤 (12)2.1.2.1 带宽的确定: (12)2.1.2.2输送带宽度的核算 (15)2.1.3 圆周驱动力 (15)2.1.3.1 计算公式 (15)2.1.3.2 主要阻力计算 (16)2.1.3.3 主要特种阻力计算 (18)2.1.3.4 附加特种阻力计算 (18)2.1.3.5 倾斜阻力计算 (18)2.1.4传动功率计算 (18)P)计算 (18)2.1.4.1 传动轴功率(A2.1.4.2 电动机功率计算 (19)2.1.5 输送带张力计算 (20)2.1.5.1 输送带不打滑条件校核 (20)2.1.5.2 输送带下垂度校核 (21)2.1.6传动滚筒最大扭矩计算 (22)2.1.7 拉紧力计算 (23)2.1.8绳芯输送带强度校核计算 (23)2.2 驱动装置的选用与设计 (23)2.2.1 电机的选用 (24)2.2.2 联轴器 (25)2.3 带式输送机部件的选用 (26)2.3.1 输送带 (26)2.3.2 传动滚筒 (26)2.3.3 托辊 (27)2.3.4 制动装置 (28)2.3.5 拉紧装置 (28)2.4其他部件的选用 (29)2.4.1 机架与中间架 (29)2.4.2 电气及安全保护装置 (31)第三章传感器的选择 (33)3.1 传感器的概述 (33)3.1.1定义 (33)3.1.2 分类 (33)3.2 传感器的选择 (34)3.2.1 传感器的类型 (34)3.2.2 传感器水平间距 (34)3.2.3 传感器垂直间距 (34)3.2.4 传感器电源 (34)第四章平台设计 (35)4.1材料选取 (35)4.2 结构示意图 (35)4.3 联接方式 (35)第五章结论和建议 (36)5.1结论 (36)5.2 建议 (36)参考文献 (37)致谢 (39)第一章引言1.1 课题目的意义嫁接就是把两种幼苗安插、结合到一起的作业。
瓜科全自动嫁接机设计与试验
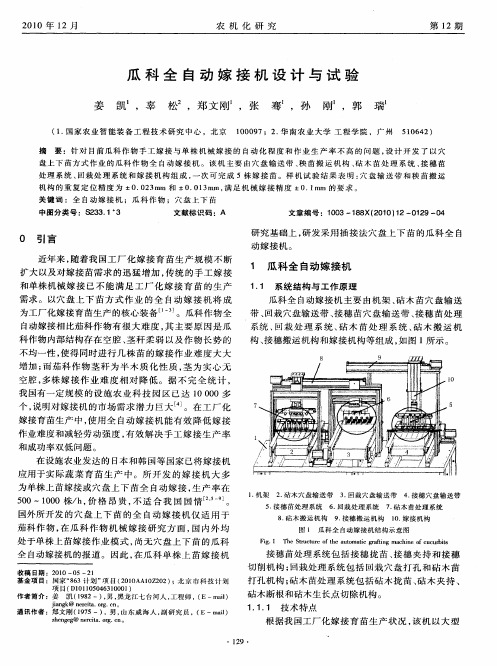
图 1 瓜 科 全 自动 嫁 接 机 结 构 示 意 图
Fi . Th t c u e o h u o t r fi g ma h n fc c r is g1 e S r t r f t e a t ma i g atn c i e o u u b t u c
为工 厂 化 嫁接 育 苗 生产 的核 心装 备 ¨ ] 。瓜 科 作 物 全 自动嫁 接 相 比茄科 作 物 有 很 大 难 度 , 主 要 原 因 是 瓜 其
瓜 科 全 自动嫁 接 机 主要 由 机 架 、 木 苗 穴 盘 输 送 砧 带、 回栽 穴 盘输 送 带 、 接穗 苗 穴 盘 输 送 带 、 穗 苗 处 理 接 系统 、 回栽 处 理 系 统 、 木 苗 处 理 系 统 、 木 搬 运 机 砧 砧
国外 所 开 发 的 穴 盘 上 下 苗 的全 自动 嫁 接 机 仅 适 用 于
1机架 . 2 砧木 穴盘输送带 . 3 I 穴盘输送 带 .团栽 4 接 穗 穴 盘 输 送 带 .
5 接穗苗处理 系统 .
8 砧木搬 运机构 .
6 回栽处理 系统 .
9 接穗搬运 机构 .
7 砧木苗处理 系统 .
和单株 机 械 嫁 接 已不 能 满 足 工 厂 化 嫁 接 育 苗 的 生 产
研 究基 础 上 , 发 采 用 插 接 法 穴 盘 上 下 苗 的 瓜 科 全 自 研 动嫁 接 机 。
1 瓜 科 全 自动 嫁 接 盘 上 下 苗 方 式 作 业 的 全 自动 嫁 接 机 将 成
关 键 词 :全 自动 嫁 接 机 ; 瓜 科 作 物 ;穴 盘 上 下 苗 中 图 分 类 号 :¥ . . 3 23 1 3 文 献 标 识 码 :A 文章 编 号 :1 0 0 3—1 8 2 1 ) 2—0 2 0 8 X( 0 0 1 1 9— 4
蔬菜钵苗移栽机取苗机构人机交互参数优化与试验
农 业 机 械 学 报
第 44 卷 第 2 期
蔬菜钵苗移栽机取苗机构人机交互参数优化与试验
叶秉良 刘 安 俞高红 骆春晓
( 浙江理工大学机械与自动控制学院 ,杭州 310018 ) 摘要: 针对蔬菜钵苗自动取苗机构多目标优化设计问题 , 利用可视化人机交互优化方法进行求解 。 建立了移栽机 取苗机构优化数学模型 , 编制基于 Visual Basic 的计算机辅助分析与优化软件 , 分析设计变量对目标和约束的影 响, 进而优化得到满足取苗要求的结构参数组合 。利用 ADAMS 软件和高速摄像技术对取苗机构运动特性进行了 移栽机仿真和台架试验验证 。试验结果与理论分析结果基本一致 , 表明了机构运动学模型及其优化设计理论和方 法的正确性和可靠性。通过取苗试验证明该机构能完成取苗作业 , 且取苗成功率为 80% 。 关键词: 移栽机 蔬菜钵苗 取苗机构 参数优化 仿真 台架试验 中图分类号: S223. 92 文献标识码: A 1298 ( 2013 ) 02005706 文章编号: 1000-
*
Parameters Optimization with Humancomputer Interaction Method and Experiment of Vegetable Seedling Pickup Mechanism
Ye Bingliang Liu An Yu Gaohong Luo Chunxiao
( School of Mechanical Engineering and Automation,Zhejiang SciTech University,Hangzhou 310018 ,China)
树苗劈接嫁接机器人机械系统设计与试验

树 苗嫁 接作 业仍 然延 续 传统 的手 工方 式 , 导致 劳动 强度 大 、 生产 效率 低 、 嫁接 苗木 的成 活率 也不 高 , 而 且
不适 应 种植 业 季节性 强 的特 点 , 难 以实现树 苗 育 苗 工 厂 化生 产 计 。有 关 树 苗 嫁 接机 器 人 的研 究 在 国 际上 尚未见 到报 道 , 中 国 见 诸 文 献 报 道 的研 究 主 要 集 中在 苗 木 力 学 特 性 试 验 - o 和苗 木 嫁 接 机 构设 两个 方 面。 “ 劈接 法 ” 是 树 苗嫁 接 的一种 主要 方式 , 多 用 于杨木 、 葡萄、 枣、 梨、 苹果、 柿子 等树 苗 , 其手 工 操作 流程 为 : ① 将 穗木 削成 正 双面楔 形 切 口; ②砧 木劈 成 一字 形劈 口 ; ③ 将穗 木插 入砧 木劈 口 , 使 砧木 横 断面 形成 层 和穗木 楔形 切 削 面形成 层 紧密接 合 , 若松 动 , 可 以捆绑 。本 文 以杨树 苗劈 接嫁接 为研 究对 象 , 模拟 手 工嫁接 作 业 , 研 制 出一 种树 苗嫁 接机 器人 样机 。
Vo 1 . 3 4 No. 1
Fe b.
2 01 3
文章 编 号 : 1 6 7 2— 6 8 7 1 ( 2 0 1 3 ) 0 1— 0 0 6 9— 0 3
树 苗 劈 接 嫁 接 机 器 人 机械 系统 设 计 与 试 验
孙 群, 赵栋杰 , 赵 颖
( 聊城大学 汽车与交通工程学 院 , 山东 聊 城 2 5 2 0 5 9 )
基金项 目: 山 东 省 自然 科 学 基 金 项 目( Z R 2 0 1 l E L 0 3 8, Z R 2 0 1 2 C Q 0 2 6 ) ; 山东 省高 等 学 校 科 技 计 划 基 金 项 目( j 1 1 L D 1 6 )
单行蔬菜钵体苗自动移栽机的设计—取苗装置设计
本科毕业设计(论文)通过答辩目录Abstract (3)第1章绪论 (6)1.1前言 (6)1.2国内外蔬菜钵苗取苗机构的发展概述 (8)1.2.1我国蔬菜钵苗移栽机械化发展概况 (8)1.2.2我国蔬菜钵苗移栽机存在的问题 (9)1.2.3我国蔬菜钵苗移栽机存在问题解决途径分析 (9)1.2.4国外蔬菜钵苗自动移栽机的发展和研究成果 (10)1.2.5蔬菜钵苗移栽机发展方向 (11)1.3国内取苗机构存在的主要问题和发展方向 (12)1.3.1国内取苗机构发展存在的主要问题 (12)1.3.2国内蔬菜取苗机构的发展方向 (12)1.4本文的研究目标 (13)1.5本文的主要工作及内容安排 (14)1.6本章小结 (14)第2章蔬菜钵苗取苗机构的运动学分析 (15)2.1取苗爪工作要求的实现 (15)2.2蔬菜钵苗取苗机械手的机构组成与工作原理 (16)2.3 椭圆齿轮传动的运动分析 (18)2.3.1 椭圆齿轮的啮合特性及优点 (18)2.3.2 椭圆齿轮的角位移、角速度和传动比分析 (19)2.4蔬菜钵苗取苗机械手运动学模型的建立 (21)2.4.1运动学分析符合的说明 (21)2.4.2蔬菜钵苗取苗机械手位移分析 (22)2.4.3机械手上各点位移方程和各构件角位移方程 (23)2.4.4 机构上各点的速度方程和各构件角速度方程 (25)2.4.5 机械手上各点的加度方程和各构件角加速度方程 (26)2.5本章小结 (28)第3章蔬菜钵体苗自动移栽机取苗机构的参数优化 (29)3.1优化目标与变量 (29)3.2辅助分析优化软件 (29)3.2.1人机交互简介 (30)3.2.2本课题人机交互软件介绍 (31)3.2.3椭圆齿轮参数计算 (31)3.2.4取苗机构参数优化步骤 (32)3.2.5取苗爪尖点的速度分析 (33)3.3本章小结 (35)第4章蔬菜钵苗自动移栽机取苗机构的结构设计 (36)4.1蔬菜钵体自动移栽机取苗机构的整体结构设计 (36)4.2取苗臂机构设计 (37)4.3 CAD软件介绍 (38)4.3.1 CAD二维取苗机构零件图 (39)浙江理工大学本科毕业设计4.4 Proe软件介绍 (40)4.4.1 三维Proe取苗机构零件图 (41)4.5总装配图 (42)4.6 本章小结 (43)第5章总结与展望 (44)5.1 总结 (44)5.2 进一步的展望 (45)致谢 (46)参考文献 (47)附录 (49)蔬菜钵体苗自动移栽机——取苗装置设计摘要移栽是蔬菜生产过程中的重要环节之一,移栽具有对气候的补偿作用和使作物生育提早的综合效益,可以充分利用光热资源,其经济效益和社会效益均非常可观。
瓜科全自动嫁接机砧木苗夹持切削机构的设计与试验

物受 到 的影 响 更 为 严 重 。蔬 菜 嫁 接 育 苗 既 能保 持 接
穗 品种 的优 良性 状 , 能 利 用 砧 木 的 有 利 特 性 , 到 又 达
早结果 、 强抗寒性 、 旱性 、 病 虫害 的能力。 目 增 抗 抗
前 , 国瓜科 蔬 菜 普 遍 采 用 手 工 嫁 接 , 仅 作 业 生 产 我 不 率低 、 作业 质 量 难 以 保 证 , 且 随 着 嫁 接 苗 需 求 量 不 而 断 增加 和 劳动力 成本 的提 高 , 工 嫁 接 的 劣势 日渐 明 人
两 片 子 叶的 展 开 方 向 基 本 一 致 , 与 前 进 方 向垂 直 , 且 相 邻 两株 苗 的子 叶避 免 互相 搭 接 。 砧 木夹 结 构 如 图 3所 示 。其 包 括 砧 木 左 排 夹 、 砧
图 2 夹 持 切 削机 构 工 作 流 程
首先 , 传送带 将砧 木苗 盘输 送 到工 作 位 置 , 苗杆 拢 依次 完成 向下 、 向前 动作 , 第 一排 的 5株 幼 苗 完全 拢 将 人夹 口; 然后 砧 木 夹 预 夹 紧 , 夹 口留有 一 定 间 隙 , 使 切 刀夹完 全 闭合 , 时 0 5 后切 刀第 1次切 削 ; 5株 幼 延 .s 待
图 1 砧 木夹 持 切削 机 构 整 体 结 构
夹持 机切 削机构 工作 流程 , 图 2所 示 。 如
夹 夹 口时 , 苗 杆 的 动 作 为 推 杆 先 下 移 , 后 前 移 拢 拢 然
苗 , 秧 苗送 至 夹 口的 限位 杆 处 , 样 便 可 安 全进 行 将 这 夹 持作 业 , 免秧 苗 被 夹伤 。 避
2 总体 方 案
蔬菜钵苗自动移栽机送苗装置的设计与分析
蔬菜钵苗自动移栽机在农业机械领 域得到了一定程度的应用,其应用主要 形式包括钳夹式、链夹式、导苗管式、 挠性圆盘式和吊杯式 5 种,在具体送苗 过程中,半自动的移栽机需要人工取苗 和喂苗,这对于移栽机应用效率产生了 较大的影响。传统的移栽机受到人工喂 苗 速 度 影 响, 移 栽 效 率 在 30 ~ 40 株 / min。 随着我国蔬菜移栽技术的快速发展, 对半自动移栽机进行改进,提升移栽机 送苗效率,成为近年来农业机械发展关 注的一个热门话题。现就这一问题从蔬 菜钵苗自动移栽机的特征入手,分析其 送苗、取苗的实际情况,有针对性地进 行设备改进,提升送苗速度。 一、蔬菜钵苗自动移栽机装置结构 与工作原理 (一)蔬菜钵苗自动移栽机装置结构 蔬菜钵苗自动移栽机装置结构主要 涉及机械、取苗机构的连接轴、滑轨、 秧板、支架、方向轮、双螺旋轴机构和 取苗爪支座等装置。通过各个装置之间 的协调合作,实现蔬菜钵苗自动移栽机 的工作目标。 (二)工作原理 蔬菜钵苗自动移栽机工作过程中, 秧板、 秧箱支架、 连接轴实现装置的工作。 移栽机的电机为其工作提供动力,并且 由链轮带动连接轴,实现秧板、滑轨等 机械设备的工作。穴盘位于秧板上面, 链条向前移动时,链轮与棘轮的联动, 实现纵向简洁送苗的目标。横向结构方 面,分割器和双螺旋轴机构是实现蔬菜 钵苗自动移栽机工作的主要部分。在这 一过程中, 电机为分割器提供动力支撑, 双螺旋轴是主要输出部分,双螺旋轴的
滑块部分会控制双螺旋轴上的秧箱进行 移动从而实现送苗功能。同时,在取苗 设计过程中,通过利用取苗机构,可以 实现送苗工作和取苗工作的自动化发展。 二、蔬菜钵苗自动移栽机送苗装置 的设计 在进行蔬菜钵苗自动移栽机送苗装 置设计过程中,考虑其自动化水平,需要 保证送苗装置具有横向送苗和纵向送苗 能力,并对取苗机构和壮苗位置进行有 效设计。具体设计情况如下:钵苗盘规 格选择上,纵向 16 穴,横向 8 穴,穴口 大小为 32 mm×32 mm,深度为 42 mm, 中心间距为 35 mm, 中心孔距离为 36 mm。 蔬菜取苗机构设计过程中,采取旋转式设 计方法,保证送苗装置工作具有较高的自 动化水平。送苗装置设计过程中,配备 2 个取苗爪,能够保证移栽机进行较好的协 调作业,提升工作效率。 蔬菜钵苗自动移栽机整体方案设计 过程中,要注重对取苗机构进行固定, 并且横向取苗装置设计时,应采取往复 间歇式的送苗作业方式。纵向取苗装置 设计时,采取纵向间歇式的设计方式, 实现纵向送苗作业。这一过程中,钵苗 盘位置选择时,根据钵苗盘的选型,8 穴为横向,16 穴为纵向。结合设计方案 来看,送苗装置的设计要求需要对以下 内容予以考虑。第一,秧箱以横向进行 往复运动,间隔距离为 36 mm,秧箱完 成 2 次移动后,取苗爪旋转一周。秧箱 运动到取苗位置后停止,保证取苗爪能 够抓取秧苗,并且保证取苗爪和秧箱的 运动是相互独立的,避免二者之间出现 干扰, 影响到工作质量和工作效率。 第二, 钵苗盘运动过程中,采取了纵向间歇作
我国最新研制营养钵苗嫁接机器人
w r clcl rt n , .. a n 8 6 5 2 0 ) o k e ab a o U S p t t ,1 , (0 4 l i i e 6 26
[ 7 】张华等 , 旋转 电弧传感 弧焊机器人 焊缝实时 纠偏 系统研 究. 器人, .3 7 01 机 Vo2 , 0 . 1 No 2 [ 8 】汤青 ,李辉 ,岳 国志 ,扈晓曼 ,刘 晓鸣. 一种机器 人砂芯 锁 芯 、下 芯 方 法 及 系 统 ,专 刊2 0 1 09 7 o8叭 00 . x,受理 时 间 ,
2 08.. 6 0 —. 22
2 1年 9 3 日 0 0 月 0 《 器 人 技 术 与 应 用 》 25 机
偿装置 ,通过在线 测量位姿误 差 ,对程序进 行局部校
Hale Waihona Puke 准 ,进一步提高编程精度 。
, .总结及展望
本 文介 绍 了R MM系 统及 基 于R MM的工程 应 C C
[ C a met F a d Huc is n S(0 6 V s a sr o c nr l 2 h u t n thn o 2 0 ) i l ev o t ] e u o
技术应用
Teh iu n p ain cnq ea dAp lcto i
参 考 文 献
[] Cev r , . ryP. ri e.s3 u eu n see iu l 1E. r e a FBe r, Mat t D s fli tro vs a n I
c onto1 00 E EE nt r tona r .2 2 I I e nai 1Conf r nc e e e on Robotc i s& Aut a on. om t i PP.6 0— 6 . 1 3 1 35
一种营养钵茄苗自动嫁接装置及嫁接方法[发明专利]
![一种营养钵茄苗自动嫁接装置及嫁接方法[发明专利]](https://img.taocdn.com/s3/m/d9b764fac281e53a5902ffcb.png)
专利名称:一种营养钵茄苗自动嫁接装置及嫁接方法专利类型:发明专利
发明人:孙群,赵颖,张来刚,张翠华,赵栋杰
申请号:CN201410635853.2
申请日:20141112
公开号:CN104303858A
公开日:
20150128
专利内容由知识产权出版社提供
摘要:本发明提供了一种营养钵茄苗自动嫁接装置及嫁接方法,包括机架,其特征是:所述机架上设置有砧木机械手组件和砧木切削组件,所述砧木机械手组件和砧木切削组件的一侧设置有传送带组件,所述传送带组件的另一侧设置有接穗机械手组件和接穗切削组件,在所述传送带的后方是自动推夹组件和自动顺夹组件。
本发明具有结构简单、成本低的优点,能够实现茄苗嫁接的自动化,提高嫁接效率。
申请人:聊城大学
地址:252000 山东省聊城市湖南路1号聊城大学机械与汽车工程学院
国籍:CN
代理机构:济南智圆行方专利代理事务所(普通合伙企业)
代理人:杜文娟
更多信息请下载全文后查看。
嫁接机器人

嫁接机器人嫁接机器人技术,是近年在国际上出现的一种集机械、自动控制与园艺技术于一体的高新技术,它可在极短的时间内,把蔬菜苗茎杆直径为几毫米的砧木、穗木的切口嫁接为一体,使嫁接速度大幅度提高;同时由于砧、穗木接合迅速,避免了切口长时间氧化和苗内液体的流失,从而又可大大提高嫁接成活率。
因此,嫁接机器人技术被称为嫁接育苗的一场革命。
日本西瓜的100%,黄瓜的90%,茄子的96%都靠嫁接栽培,每年大约嫁接十多亿棵。
从1986年起日本开始了对嫁接机器人的研究,以日本“生物系特定产业技术研究推进机构”为主,一些大的农业机械制造商参加了研究开发,其成果已开始在一些农协的育苗中心使用。
由于看到了蔬菜嫁接自动化及嫁接机器人技术在农业生产上的广阔前景,日本一些实力雄厚的厂家如YANMA、MITSUBISHI等也竟相研究开发自己的嫁接机器人,嫁接对象涉及西瓜、黄瓜、西红柿等。
总体来讲,日本研制开发的嫁接机器人有较高的自动化水平,但是,机器体积庞大,结构复杂,价格昂贵。
90年代初,韩国也开始了对自动化嫁接技术进行研究,但其研究开发的技术,只是完成部分嫁接作业的机械操作,自动化水平较低,速度慢,而且对砧、穗木苗的粗细程度有较严格的要求。
在蔬菜嫁接育苗配套技术方面,日本、韩国已生产出专门用于嫁接苗的育苗营养钵盘。
在欧洲,农业发达国家如意大利、法国等,蔬菜的嫁接育苗相当普遍,大规模的工厂化育苗中心全年向用户提供嫁接苗。
由于这些国家尚未有自己的嫁接机器人,所以嫁接作业,一部分仍采用手工嫁接,一部分采用日本的嫁接机器人进行作业。
1997年,我国设施栽培面积达到120万公顷,成为世界上最大的设施栽培国家。
特别是以日光温室为代表的具有中国特色的保护地蔬菜栽培和塑料大棚的发展尤为迅速,目前已突破1000万亩。
它缓解了蔬菜淡季的供需矛盾,同时也成为我国农民致富的重要途径。
但由于蔬菜的生物特性和生长环境特性,连茬病害和低温障碍一直是严重影响设施蔬菜生产的主要问题。
葫芦科营养钵苗单人操作嫁接机器人设计与试验

( b) 切削后穗木搬运
穗木夹持搬运机构的作用是完成对穗木苗的 夹持和搬运 , 以保证穗木的正常切削并搬运至指 定位置完成嫁接工作 。 目前国内外半自动嫁接机 都设有砧木 和 穗 木 供 苗 台 , 由两人分别将砧木和 穗木放到供 苗 台 上 , 然后由搬送机械手从供苗台 上将幼苗 夹 持 搬 送 到 切 苗 处 、 进 行 切 苗 嫁 接。 在 一人操作的 情 况 下 , 若沿用老方法设置供苗台将 会使机器结构分布松散 、 给操作带来不便 、 降低工 作效率 。 为此 , 本研究设计了集供苗台 、 搬送机械 手于一身的穗木夹持搬送机构 , 结构如图 2 所示 。 主要包括 : 机架 、 旋转气缸 、 直推气缸 、 直推气缸连 接板 、 穗木 检 测 传 感 器 、 穗 木 夹 持 气 爪、 穗木切削 支点等 。 具体工作过程如图 3 所示: 当操作人员将穗木 放置于穗木固定支板的豁口处时, 穗木检测传感器 检测到穗木苗到位, 随即穗木夹持气爪闭合夹持住 旋转气缸旋转 90° 将穗木细苗旋转搬运至切 穗木, 苗处进行切苗( 图 3a) 。当穗木苗切削完毕后, 旋转 气缸反向旋转 90° , 将已切削的穗木苗又旋回搬运 置供苗处原位, 然后直推气缸将穗木苗推送至嫁接 处进入嫁接过程( 图 3b) 。 根据工作环境及机构布局, 选定直推气缸工作 行程为 100 mm; 为保证完成穗木的夹持和搬运, 穗木 固定支板、 穗木气爪和穗木切削支点的相对位置必须 精确, 经理论计算及试验分析, 确定穗木固定支板上
葫芦科营养钵苗单人操作嫁接机器人设计与试验26313嫁接钵苗自动排列摆放机构fig13graftedseedlingbowlautoarrangingunit苗钵收纳盘苗嫁接完成后由人工放置于苗钵输送带上苗钵输送带将嫁接苗钵输送至苗钵收纳盘附近苗钵纵向位置传感器检测到嫁接苗钵后通过控制系统的识别判断嫁接钵苗应该推送的位置然后在推送线性组和苗钵推板的作业下推送至苗钵收纳盘中的指定位进行切削时如果穗木茎秆在切口附近弯曲过大容易造成切削后进行贴合时贴合失败不利于嫁接作业的顺利进行2来自0农业机
蔬菜穴盘苗钵体力学分析与移栽机器人设计研究

蔬菜穴盘苗钵体力学分析与移栽机器人设计研究我国穴盘苗移栽处于人工取苗半自动栽苗水平,研发结构简单、功能精良并适于当地育苗生产的取苗装置是实现穴盘苗全自动移栽的关键。
目前,国内尚无法设计出能够实际生产应用的自动移栽机,主要原因是机构设计中取苗爪与钵体互作规律不清,穴盘苗的生物力学特性数据短缺,机构设计与育苗工艺不相结合,严重制约着自动移栽机的发展。
针对这些制约因素,本研究主要完成以下工作:(1)研究了穴盘苗脱盘力学规律和钵体抗压力学行为。
研究发现穴盘苗脱盘过程是钵土与幼苗根系相互牵动摆脱孔穴粘附的过程,对穴盘苗的夹取作用主要用于克服钵体与穴孔之间建立的粘附力,当使用128穴盘育苗移栽时,沿垂直穴孔方向取出穴盘苗的夹取力约为1.94N。
钵体的抗压力与变形呈非线性变化规律,抗压力随着压缩变形的增大先缓慢增大再显著增大。
在平板压缩过程中,钵体无明显的屈服破坏点,其压缩破坏特征是从钵体盘根稀疏的区域开始,逐渐扩大破碎度。
在弹塑性方面,随着压缩变形的增大,滞后损失Ep、抗压峰值力Fmax均增大,弹性度rε减小,并且穴盘苗钵体压缩加载变形越大,其塑变能力越强,具有一定的可塑性,可以使用夹取针夹持钵体而不破坏其整体性。
利用Burgers模型能有效表征穴盘苗钵体的压缩蠕变特性,利用二单元Maxwell模型能有效描述穴盘苗钵体的力松弛特性,获得了对应的粘弹性参数,并分析了压缩加载蠕变和力松弛规律。
对于穴盘苗自动移栽而言,其流变学特性影响微弱,可以不加考虑。
通过试验测试方法对比分析了多种穴盘苗的力学特性,研究发现不同蔬菜穴盘苗处理间的脱盘力无显著性差异,不同穴盘苗钵体的抗压力与变形关系均遵从非线性曲线,都没有明显的线弹性。
(2)基于对穴盘苗脱盘力、夹取针插入钵体拉拔的摩阻特性以及钵体抗压力分析,建立了穴盘苗的脱盘力FL、钵体抗压力F、压缩加载的面积AY与夹取针的插入角度α、夹持变形角△α、夹持钵体的面积AJ、钵体夹持变形量x之间的数学关系。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
对蔬菜 自 动 嫁 接 机 装 置 也 相 继 开 展 了 研 究 。 但 到目前为止 , 国内外 研 制 出 的 自 动 嫁 接 机 基 本 上 机器的人均工作效率 都需要 2 个人向机 器 供 苗 , 。 并不理想 式
[11 - 12 ]
营养钵育苗是我国一些地区普遍采用的育苗方 。采用营养钵育苗方式的幼苗嫁接作业由
[11 , 15 ] , 葫芦科的“贴接法 ” 嫁接方式 设计只需一个 人就能进行砧木钵苗、 穗木供苗和嫁接操作的高效
Structure diagram of grafting robot
木夹持搬运机构 8. 砧木固定机构 9. 砧木旋切机构 送夹器 11. 穗木穴盘托盘
其工作过程如下: ①穗木供苗切苗: 由穗木穴盘 托盘的穗木穴盘中取出穗木苗, 放置于穗木夹持搬 运机构上, 随即该机构将穗木幼苗夹持并搬送到穗 木切削机构, 进行穗木的切苗处理。 ② 砧木供苗搬
单人葫芦科营养钵苗嫁接机。
0730 修回日期: 20140825 收稿日期: 2014* 国家高技术研究发展计划( 863 计划) 资助项目( 2012AA10A5062) 、 09 ) 和北京农业智能装备技 公益性行业科技资助项目( 201303014KFZN2011W06 ) 术研究中心开放课题资助项目( Email: chujia_1117@ 126. com 作者简介: 褚佳, 博士生, 主要从事生物生产自动化研究, : Email: zhangtz56@ 163. com 通讯作者 张铁中, 教授, 博士生导师, 主要从事生物生产自动化及机电一体化研究,
图4
穗木切削过程示意图 Cutting of scion
Fig. 4
增刊
褚佳 等: 葫芦科营养钵苗单人操作嫁接机器人设计与试验
261
质量: 开口太小, 不利于切刀进退; 开口太大, 穗木茎 秆容易弯曲, 影响切苗质量。 理论上, 开口大小 w 与切刀宽度 b 以及穗木预定切留角度 φ 间存在关系 w ≥bcosφ ( 1) 切刀选用普通 11 号手术刀片, 宽度为 8. 0 mm, 穗木预定切留角度 30° , 由式( 1 ) 计算出穗木切削开 因此确定穗木切削支点 口大小的理论值为 7. 0 mm, 开口大小为( 7. 5 ± 0. 5 ) mm。 2. 3 砧木夹持搬运机构 葫芦科砧木苗嫁接的关键是生长点能否准确切 除。因此, 本文砧木夹持搬运机构由两部分组成 , 分 别是砧木固定装置和砧木钵苗搬运装置 。如图 5 所 示, 主要由各直推气缸、 砧木定位支板、 砧木夹持气 爪等组成。
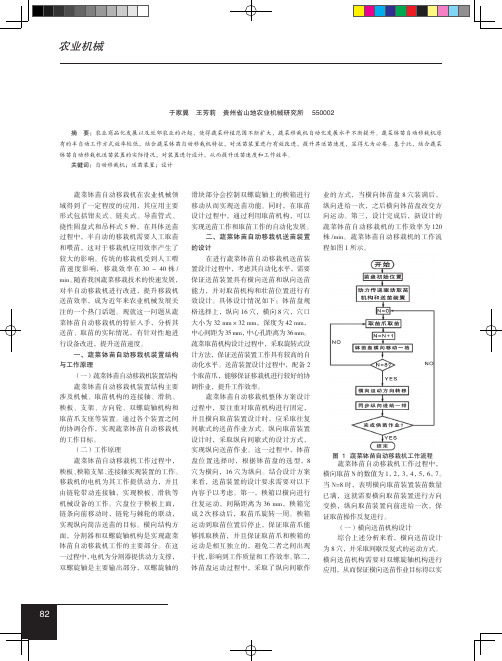
图8 Fig. 8 砧木切削几何模型 Modeling of stock cutting
图 8 中, 旋转切刀的旋转中心设为 O, 其距砧木 茎秆中心轴的距离为 d, 该距离亦是安装旋转切刀 机构时以砧木茎秆为基准时的水平安装尺寸 。另设 切刀切完砧木后与砧木茎秆相交的 2 点分别是 A 和 B, 理论上 AB 为砧木茎秆被切的形状, 为便于计算, 将弦 AB 与竖直方向的夹角 β 设定位砧木的切角。 于是可得 β+ π-θ + 2 - ( α - θ) ] = π [π 2 θ d = rcos ( α - ) 2 ( 2) ( 3)
Fig. 2 图2
1. 机架 2. 旋转气缸 削支点
穗木夹持搬运机构
3. 直推气缸 4. 直推气缸连接板 7. 穗木夹持气爪 5. 穗
Scion pregripping and transporting unit
8. 穗木切
木固定支板 6. 穗木检测传感器
2
2. 1
关键部件设计与分析
穗木夹持搬运机构
260
农
业
机
械
学
报
2014年
送切苗: 在完成穗木供苗后即可将砧木钵苗托盘中 的砧木钵苗放置于砧木钵苗夹持搬运机构中 , 通过 砧木固定机构、 砧木旋切机构进行砧木子叶和生长 点的切割处理。③ 砧木穗木贴合嫁接: 砧木旋切机 构将砧木切除一片子叶后, 穗木夹持搬运机构将刚 刚完成切苗、 处在待命状态的穗木推送至贴合嫁接 处与砧木贴合。④ 夹合固定: 自动送夹器将由振动 送夹料盘排列的嫁接夹送至砧、 穗木贴合处, 并使嫁 接夹自动张开闭合, 将贴合的砧木和穗木幼苗夹合 固定在一起, 完成嫁接作业。 ⑤ 回位排苗: 砧、 穗木 搬运机构各自归位, 等待下次作业; 与此同时, 已嫁 接完成的钵苗被放置于嫁接钵苗自动摆放机构中的 传送带上。⑥钵苗输送摆放: 传送带将嫁接钵苗运 通过位置传感器的检测, 检测 送置嫁接钵苗放置区, 由推送板将嫁接钵苗 出嫁接钵苗需要放置的位置, 推送至苗钵收纳盘中的指定位置, 规整摆放。 ⑦ 当 苗钵收纳盘中的嫁接钵苗排列满之后, 即可将其更 新。
[1 - 4] 。进 决这些问题 , 嫁接机器人技术应运而生 入 21 世纪 , 嫁接机器 人 技 术 在 日 本 、 韩国有了一
1
系统组成及工作原理
葫芦科营养钵苗单人操作嫁接机器人主要由 6 部分组成, 包括穗木夹持搬运机构、 穗木切削机 构、 砧木夹持搬运机构、 砧木旋切机构、 嫁接夹自动 排列输送机构以及嫁接钵苗自动排列摆放机构等 , 如图 1 所示。
砧木夹持搬运机构主要完成对钵苗砧木的定位 、 夹持 搬运以及砧木切削夹持。 其主要工作过程如 图 6 所示。当砧木上苗时, 将茎秆上端两子叶根部 卡于砧木上 定 位 支 板 的 豁 口 处 , 茎秆下端卡于砧 木下定位支 板 的 豁 口 处 , 砧木检测传感器检测到 夹持气爪闭合夹持住砧木 , 随后砧木 砧木就位后 , 上定位支板 连 接 气 缸 带 动 砧 木 定 位 支 板 后 退 , 与 砧木分离 , 砧木搬运气缸伸出将砧木钵苗推送到 随即砧木切苗支点气缸伸出使砧 砧木切苗位 置 , 木切苗支点 抵 住 砧 木 生 长 点 下 方 茎 秆 , 准备进入 砧木切削环节 。 根据工作环境以及机构布局, 选定砧木搬运气 砧木切苗支点气缸的行程为 缸的行程 为 90 mm, 50 mm, 砧木上定位支板连接气缸的行程为 30 mm。 2. 4 砧木旋切机构 砧木旋切机构的作用是完成对砧木的削切, 保 证切除砧木生长点。 采用旋切方式, 有利于砧木生 长点的切除, 又能使另一片子叶完整保留。 旋切机 构主要由旋转气缸、 刀片以及各连接件组成。 式中
图1 Fig. 1
1. 穗木夹持搬运机构 摆放机构 4. 机架
嫁接机器人结构示意图
2. 穗木切削机构 5. 振动送夹料盘 3. 嫁接钵苗自动排列 6. 砧木钵苗托盘 7. 砧 10. 自动
于不用将苗从穴盘内取出, 因而对根系损伤较小, 利 于嫁接后缓苗和生长; 并可直接将钵苗移栽至大田, 省工省力。 为进一步提高人均操作效率以及自动化水平, 500 型嫁接机[13 - 14]基础上, 在前期研制的 BMJ采用
图3 Fig. 3 穗木夹持搬运机构工作示意图 Pregripping and transporting of scion
( b) 切削后穗木搬运
穗木夹持搬运机构的作用是完成对穗木苗的 夹持和搬运 , 以保证穗木的正常切削并搬运至指 定位置完成嫁接工作 。 目前国内外半自动嫁接机 都设有砧木 和 穗 木 供 苗 台 , 由两人分别将砧木和 穗木放到供 苗 台 上 , 然后由搬送机械手从供苗台 上将幼苗 夹 持 搬 送 到 切 苗 处 、 进 行 切 苗 嫁 接。 在 一人操作的 情 况 下 , 若沿用老方法设置供苗台将 会使机器结构分布松散 、 给操作带来不便 、 降低工 作效率 。 为此 , 本研究设计了集供苗台 、 搬送机械 手于一身的穗木夹持搬送机构 , 结构如图 2 所示 。 主要包括 : 机架 、 旋转气缸 、 直推气缸 、 直推气缸连 接板 、 穗木 检 测 传 感 器 、 穗 木 夹 持 气 爪、 穗木切削 支点等 。 具体工作过程如图 3 所示: 当操作人员将穗木 放置于穗木固定支板的豁口处时, 穗木检测传感器 检测到穗木苗到位, 随即穗木夹持气爪闭合夹持住 旋转气缸旋转 90° 将穗木细苗旋转搬运至切 穗木, 苗处进行切苗( 图 3a) 。当穗木苗切削完毕后, 旋转 气缸反向旋转 90° , 将已切削的穗木苗又旋回搬运 置供苗处原位, 然后直推气缸将穗木苗推送至嫁接 处进入嫁接过程( 图 3b) 。 根据工作环境及机构布局, 选定直推气缸工作 行程为 100 mm; 为保证完成穗木的夹持和搬运, 穗木 固定支板、 穗木气爪和穗木切削支点的相对位置必须 精确, 经理论计算及试验分析, 确定穗木固定支板上
定 发 展, 并 已 应 用 于 实 际 蔬 菜 育 苗 生 产 中, 但此 类嫁接机价格较为 昂 贵 , 并不适合一般农户和中
[2 ,5 - 9] 。 国 内, 小育苗基 地 中国农业大学率先研 600 型 穴 盘 嫁 接 机 以 及 BMJ500 型 营 制 出 2 JSZ[10] , 养钵苗嫁接机 此 后, 国内一些院校科研单位
2 0 1 4 年 11 月 doi: 10. 6041 / j. issn. 10001298. 2014. S0. 042
农 业 机 械 学 报
第 45 卷 增 刊
葫芦科营养钵苗单人操作嫁接机器人设计与试验
褚 佳 张铁中
( 中国农业大学工学院,北京 100083 )
*
“贴接法” 摘要: 基于葫芦科营养钵苗的 嫁接技术, 设计了由穗木夹持搬运机构 、 穗木切削机构、 砧木夹持搬运机 构、 砧木旋切机构、 嫁接夹自动排列输送机试验得出, 该机器人的理论嫁接速度可达 440 株 / h, 实际操作嫁接速度达到 285 株 / h, 嫁接成功率为 92% , 与同类型的双人操作营养钵苗嫁接机相比, 人均作业效率提高 36% 。增加了嫁接钵苗的后续自动排列摆放 提高了嫁接生产自动化程度 。 机构, 关键词: 嫁接机器人 葫芦科 营养钵苗
— —线段 OA 与水平方向的夹角 α— — —圆心角∠AOB θ—
)
262
农
业