煤矿用履带式巷道修复机工作机构的仿真分析
巷道修复机试用中的改进及创新
巷道修复机试用中的改进及创新作者:刘宝来源:《中国化工贸易·上旬刊》2018年第03期摘要:我队负责北翼采区失修巷道维修,由于失修巷道多、距离长,人工风镐开挖结合耙矸机出矸使职工劳动强度大,因此巷修任务比较重,巷修效率低。
4月份,矿引进试用了巷道修复机,并在我队26回风大巷巷修点进行试用。
通过对巷道修复机的观察试用和现场实践总结,我队发现巷道修复机存在一些不足之处阻碍生产及影响职工人身健康。
关键词:巷道;修复机;改进及创新1 巷道修复机在试用中的不足之处巷道修复机在26回风大巷使试用,由于回风巷粉尘较大、风速高,操作室前方无挡风防尘设施,司机在操作时受环境影响,看不清前方具体施工点,造成开挖后巷道不符合标准或者开挖时破坏到巷道内其它管路或设备等。
此外,出矸系统无降尘设施,不符合国家相关规定,未做好职业病防治工作,对作业人员造成伤害。
设备在出厂时,破碎锤上配置的破碎钎杆是700mm长钎杆,而在扩刷时,由于挖斗的阻挡,钎杆扩刷长度只能达到300mm,与棚距700mm不相适应,还需在出矸、再进行扩刷,浪费工时。
巷道修复机挖斗与破岩钎杆在同一摇臂上,落底或者装矸时,由于钎杆过长影响挖斗出矸,需将钎杆去掉,而钎杆去掉之后,在挖斗装矸时,碎矸块会进入钎杆孔内,使钎杆孔堵塞、污染,影响钎杆的安装。
巷道修复机进行出矸作业时,需人工推车出矸,而在人工推车时,矿车不能及时停止而到达最佳位置,以致矿车撞到巷道修复机尾部,因而降低了出矸效率,还损坏了新设备。
巷道修复机在破碎岩石时,由于破碎锤油缸接头高出油缸护板40mm,而造成油缸接头碰到顶板后损坏,不能正常作业。
另外,破碎锤油缸销子,由于在生产中油缸冲击频繁、冲击力大,易造成损坏,而且备用少,成本高。
2 巷道修复机试用中的改进及创新2.1 增加挡风尘塑料隔板及防尘喷雾为了克服恶劣环境的影响,使操作司机作业视线清晰,我队在操作室前方安装挡风尘塑料隔板,让操作司机在良好环境下操作,提高了作业标准。
巷道修复机在巷道底板治理中的应用分析

FORUM 论坛装备184 /矿业装备 MINING EQUIPMENT巷道修复机在巷道底板治理中的应用分析□ 闫 佳 晋城宏圣建筑工程有限公司1 国产某型号巷道修复机WPZ-55/900 型煤矿用多功能巷道修复机结构特点:(1)采用三节臂的设计,可以根据巷道大小变化,调节臂的高低,避免触碰锚杆,锚索,巷顶板,从而使修复机在不同高度的断面内灵活作业。
(2)中间臂采用旋转油缸结构,可以无障碍 360°破碎挖掘。
(3)三节臂油缸采用内藏式结构,有效的保护油缸,且装设有保护套,避免工作过程中发生碰撞而损坏油缸。
(4)配有“推土铲”可满足平整巷道工作面和支稳机身的作用。
(5)液压系统安装紧凑,液压管路在臂的两侧,且有弹簧保护套。
(6)液压系统采用高压系统,可以实现挖斗较大的挖掘力。
(7)液压油路的链接密封可靠。
(8)操作室采用半封闭式结构,视线好,强度高,顶棚高度可调,拆装方便。
(9)设备主机动力部分采用集中紧凑式结构,外加保护罩,减少矸石等对动力部件损伤,降温采用强制风冷式降温方式。
(10)挖斗可以快速更换成破碎锤,可以破碎 360°无死角,实现一机多用。
(11)采用防爆电动液压系统,具有噪声低、无尾气污染的特点,同时电气系统用防爆元件,更适用于井下(尤其是煤矿)使用。
2 本巷道修复机在巷道底板治理中的具体示范应用分析2.1 主要操控结构和主要操控流程各操作手柄、踏板及按钮的功能及操作方向(方向基准为机器行走马达位于后部,操作者面向机器前进方向)主要功能和操作如下。
电铃启动按钮:点动式按钮,按下即发出声响;启动控制远程按钮:按启动按钮,设备运转;先导开关:首先打开先导开关,才能进行工作部件的操作;右脚踏阀:自复位式开关,向前踏,破碎锤启动;松开脚,破碎锤即停止工作;左操作手柄:向前推,小臂开;向后拉,小臂收;向左推,左转;向右推,右转。
巷道修复机是煤矿巷道中应用较多的一种高自动化机械装置,近年来我国一些设备厂商开始研发和应用这种煤矿机械。
煤矿用巷道修复机说明书
煤矿用巷道修复机说明书一、引言1.1 任务背景在煤矿开采过程中,巷道的损坏是一项常见的问题。
需要及时修复巷道才能保证矿工的安全以及煤矿生产的正常进行。
为解决这一问题,煤矿用巷道修复机应运而生。
1.2 修复机的作用煤矿用巷道修复机是一种专门用于煤矿巷道修补与加固的设备。
它能够快速、高效地修复损坏的巷道,提高工作效率,降低维护成本,确保巷道的稳定性和安全性。
二、巷道修复机的组成部分煤矿用巷道修复机包括以下几个主要组成部分: 1. 主体结构:由底座、支撑臂、高压喷射器、液压泵站等组成。
2. 控制系统:采用先进的自动控制技术,实现对修复机的操作和控制。
3. 传动系统:由电机、传动装置等组成,用于驱动修复机的各个动作。
4. 工作装置:包括喷射器、补强材料输送装置等,用于对巷道进行修补和加固。
三、巷道修复机的工作原理3.1 巷道扫描修复机首先需要对巷道进行扫描,获取巷道的完整结构图。
通过激光扫描仪等设备,能够快速、准确地获取巷道的形状和尺寸。
3.2 损坏区域识别通过计算机图像处理技术,修复机可以识别出巷道中的损坏区域,并将其标记出来。
这样操作人员就能清楚地知道哪些区域需要进行修补。
3.3 材料喷射修复机采用高压喷射技术进行修补。
根据巷道的材料特性和修复要求,选择合适的补强材料,并通过喷射器将其喷射到损坏区域。
3.4 补强材料固化修复机喷射的补强材料通常是快干型的,其固化时间较短。
在喷射完成后,补强材料会迅速固化,并与巷道墙面形成牢固的结合。
四、巷道修复机的优势修复机在巷道修复方面具有以下优势: 1. 高效快速:采用自动化技术,能够快速扫描、识别、喷射和固化,提高工作效率。
2. 精确准确:凭借先进的传感器和图像处理技术,修复机能够准确识别损坏区域,并对其进行精细修补。
3. 安全可靠:修复机操作简单,操作人员无需直接进入巷道,降低了工作风险。
4. 降低维护成本:通过及时修复巷道,可以延长巷道的使用寿命,降低了后期的维护成本。
煤矿井下巷道修复机在巷修施工中的应用

煤矿井下巷道修复机在巷修施工中的应用摘要:龙煤集团鹤岗分公司下属富力煤矿,针对目前井下开采,随着矿井的延深,矿山压力显现明显增大,已施工巷道出现严重变形,底板鼓起、顶板下沉、两帮位移严重,断面缩小,需要恢复场所增多,人工修复巷道已不能满足生产接续需要,为提高快速修复巷道能力,富力煤矿井下巷道恢复采用型号:MWD5.1/0.13L 型煤矿用液压巷道修复机,该机结构紧凑、外形尺寸小,行走灵活,利用机械臂配合可互换的机构,实现多功能切换,机械配备挖斗、破碎器、能够旋转360度,具有足够的强度,破碎强度达到f≤10以内的岩壁,可进行巷道开帮、挑顶;卧底、装货;支护前利用机械臂升起刹杆,撑起钢筋网可作为巷道临时支护等功能来保证煤矿安全生产奠定基础,实现煤矿巷修机械化,从而提高煤矿安全、高产、高效巷道修复技术。
关键词:富力煤矿;巷道修复机;电力液压系统;巷修机械化前言:随着富力煤矿不断的开采,深部巷道已处于高应力集中区,巷道围岩变形严重,底板鼓起,顶板下沉,两帮向巷道里侧位移明显增大,巷道需要恢复场所明显增多,依靠人工体力恢复巷道缓慢,工作效率低,工人劳动强度大,开帮挑顶放炮时对巷道电缆及各种管路损坏严重,并且围岩松动圈加大,存在不安全隐患。
因此我矿引进型号:MWD5.1/0.13L 型煤矿用液压巷道修复机,该机结构紧凑、外形尺寸小,由于采用电动液压系统,因而具有节约能源、卧底、开帮、挑顶等多功能集于一身的巷道修复机替代人工进行巷道恢复工作,既省时又省力,巷修作业效率高,实现煤矿巷修机械化,从而提高掘进巷道恢复速度。
1.结构特征及功能特点辽宁鑫丰矿电设备制造,MWD5.1/0.13L 型煤矿用液压巷修机由 1、挖斗、2 、工作装置、3 回转平台、4液压系统、5 底盘总成、6 机罩、7、破碎锤、8、电气系统等组成,同时由于采用电动液压系统,因而具有节约能源、噪声低、污染小、效率高等特点,可用于恢复巷道开帮挑顶、卧底、拉水沟、装岩(煤)及掘进作业。
煤矿用巷道修复机说明书

煤矿用巷道修复机说明书
煤矿用巷道修复机是一种高效、可靠的设备,用于煤矿巷道的修复和维护。
本文将为您介绍煤矿用巷道修复机的操作指南、注意事项和维护方法。
操作指南:
1. 巷道修复机工作前,需将设备的各个部分进行检查和维护,确保设备正常运转。
2. 在使用巷道修复机时,必须使用符合规定的安全阀门、紧急停车按钮等安全装置。
3. 巷道修复机工作时,操作人员必须站在安全地带,防止被机器吸入或夹住。
注意事项:
1. 巷道修复机使用时一定要注意安全,特别是在巷道壁面不平整的情况下,要注意维持设备的平稳运行。
2. 工作时要注意集中精力,避免因疏忽大意造成事故,严禁酒后操作。
3. 在清洗设备时,使用的清洗剂应当符合环保要求。
对设备的各个部件要进行及时的清洗,防止沉积和积尘影响设备的正常使用。
维护方法:
1. 工作结束后,要及时清理设备周围的灰尘和污垢。
长时间的灰
尘和污垢会堵塞设备通风口,影响设备的正常运转。
2. 检查设备各个部分的螺丝是否松动,如有松动应及时进行紧固。
3. 定期更换设备的滤芯和滤网,保证设备正常运转,并延长设备
的使用寿命。
总的来说,煤矿用巷道修复机是一种非常重要的设备,对于煤矿
工业的生产和安全起着关键的作用。
因此,我们必须对其进行严格的
操作、维护和保养,保证设备的正常工作,并为您的工作带来更大的
安全和效率。
履带式起重机行走机构故障分析及修复
履带式起重机行走机构故障分析及修复履带式起重机是一种依靠履带装置行走的移动式起重机械,依靠其独特的行走机构,使起重机具有带载行驶、接地比压小、爬坡能力强、转弯半径小等特点,行走机构的动态特性,直接影响着履带起重机整车的性能。
在平常的使用中常常出现走行跑偏的现象,使操作起重机的工作效率大打折扣。
为了解决这一问题,本文针对一个故障排查的实例来对整机液压系统进行探讨研究,加以AMESim为平台进行仿真分析,并提出一些日常使用中的建议。
1工作原理该起重机行走液压系统采用双泵、双马达结构,即左、右行走机构各有1个变量泵、1组控制主阀和I个变量马达,各自独立驱动。
以右侧为例:右控制主阀为力士乐MO-5205-00/4M0型电液控制阀。
该阀为四联阀,分别控制右侧履带的行走、主变幅机构、主钩和副钩。
压力油通过右控制主阀的右行走阀片后进入中心回转接头,再通过胶管及快换接头连接到右侧行走变量马达,将动力传递到右侧行走马达。
左侧与右侧相同。
2故障原因分析2.1磨损原因行走机构的机械部件承担自重、作业载荷及运行中的冲击载荷,还要受到砂石、泥水的污染侵蚀,工作条件恶劣,易被磨损。
从行走机构的结构分析,引导轮、支重轮和驱动轮三者的轴线必须和支重轮架的对称中心线重合,该中心线与起重机的半轴轴线垂直,才能保证履带吊直线行走,但驱动轮、托轮、引导轮及支重轮的轮齿磨损,轴承轴套、轴磨损及变形,使驱动轮、引导轮、支重轮与轨链发生啃削,严重时发生履带跑偏、脱轨,进一步加剧这些零部件的磨损,造成恶性循环。
1)土壤、砂石等不利外部环境对磨损的影响。
土壤和砂石对行走机构的影响主要体现在土壤的酸碱度和砂石的硬度、形状上,酸性土壤、带有锐角的碎石、硬度大的砂石等对零部件的腐蚀和磨损较为严重。
2)零部件之间压力及润滑的影响。
在相同材质下,磨损量与作用在零部件上的压力成正比,单位压力越大,磨损量也越大。
因此应尽量避免过大的单位压力。
缺少润滑使零件直接接触,加剧磨损的产生。
科技成果——煤矿用巷道修复机

科技成果——煤矿用巷道修复机技术开发单位石家庄煤矿机械有限责任公司适用范围该机可应用于煤巷、半煤岩巷和全岩巷,可以对巷道顶板、底板及侧帮进行破碎、挖装、侧掏、装运等日常维护作业,也可以对大块的岩石、煤块进行破碎,以便装运,可满足煤矿井下使用条件和要求,实现了地面用工程机械中的挖掘、破碎、清理、平整、吊装、出矸等施工作业。
成果简介1、采用新型工作臂旋转机构,并申请国家发明专利,使工作臂沿轴线旋转±180°,传动扭矩大,可实现多向灵活作业,不仅可以进行垂直的挖掘操作,而且还可以水平状态对设备的底部进行清扫;2、实现铲斗、冲击锤互换设计,可对坚硬岩石或大块矸石进行破碎,实现一机多用功能;3、集成了液压锚杆机,对巷道进行修复的同时进行锚护作业;4、自带输送机,可将修复后的矸石直接转载到皮带机或矿车,不必再配备专门的出矸设备。
关键技术1、修复工艺简单,小型巷道修复机装机采用旋转油缸,一个工作臂可实现修复作业;2、在煤矿用扒装机基础上,增加了工作臂旋转功能,并增加了可自动切换挖斗及破碎锤的机构,省去人工更换,使挖掘臂升级为修复臂;3、其自带的输送功能,大大提高了出矸量,提高了修复效率。
应用情况许疃矿自2016年3月1日开始使用WPZ-55/400型巷道修复机以来,修复巷道断面为3m×3m(高×宽),目前单班进尺已超过原两班进尺。
系统性能稳定,质量可靠,可实现挖掘毛水沟、卧底、破岩、清理浮煤、运输、平整巷道及小型配件吊装等多种功能,巷道修复机具有断面成形质量好、修复效率高等突出优势,能有效减轻工人劳动强度,延长设备使用寿命。
煤矿用巷道修复机的研制成功,促进了煤矿机械化的发展,为煤矿巷道修复提供了新技术装备,进一步加快了煤矿建设“机械化减人”进程;改善了巷修作业工作环境,替代人工挖掘底鼓的底板,清理巷道浮煤,挖掘顺槽毛水沟等工作,减轻职工的重体力劳动,提高劳动效率和安全可靠性。
矿用履带式管道清洁机器人的改进与运动学仿真

矿用履带式管道清洁机器人的改进与运动学仿真摘要:本文讨论了矿用履带式管道清洁机器人的改进及其运动学仿真。
首先概述了该种机器人的基本构造,并详细介绍了改进思路,其中包括使用传感器优化机器人的操作,以及动力学分析、物理模型和控制设计。
然后结合专业软件对机器人进行了运动学仿真,具体参数如下:垂直旋转半径1.5m,水平旋转半径2.0m,螺距6mm,步进角0.1 度,外部电源电压12V。
最后,以实验数据为基础,检验了最终设计的有效性。
关键词:机器人,改进,运动学仿真,传感器,动力学分析,物理模型,控制设计正文:1. 绪论由于管道系统的复杂性和深度,传统的入侵检查和清洁方法存在一定的局限性。
为了加快清洁速度,提高清洗效率,我们设计了一种基于履带的管道清洁机器人,用于清洁大型铁路隧道。
2. 改进思路本研究着重改进该履带清洁机器人:(1)传感器优化:配备激光传感器进行定位,高精度惯性测量单元(IMU)用于检测机器人的姿态,摄像头用以实时观察机器人的运动情况。
(2)动力学分析:考虑机器人的物理参数(质量,惯性,摩擦等),建立完整的动力学模型,以便提供准确的操控系统。
(3)物理模型:使用多体系统模型(MBS)对机器人的运动特性进行分析,建立完整的模型,使用多种材料来设计具有耐久性的机器人。
(4)控制设计:根据上述物理模型和动力学分析,提出了一种可行的控制设计方法。
它涉及到两个步骤:首先是定义机器人的运动学结构及其相关参数,然后确定控制方法及其所需的参数。
3. 运动学仿真将所有物理参数整合到一起,使用专业软件对改进的机器人进行了运动学仿真。
实验中,垂直旋转半径为1.5m,水平旋转半径为2.0m,螺距6mm,步进角0.1 度,外部电源电压12V。
4. 结论使用传感器优化机器人的操作、动力学分析和物理模型,以及控制设计,本文设计并实现了一种矿用履带式管道清洁机器人,并且在运动学仿真方面取得了良好的效果。
实验结果表明,改进后的机器人较传统的清洗机器人具有较高的清洗效率,能够满足大型铁路管道的清洗需求。
煤矿井下多功能巷道修复机的研究与应用
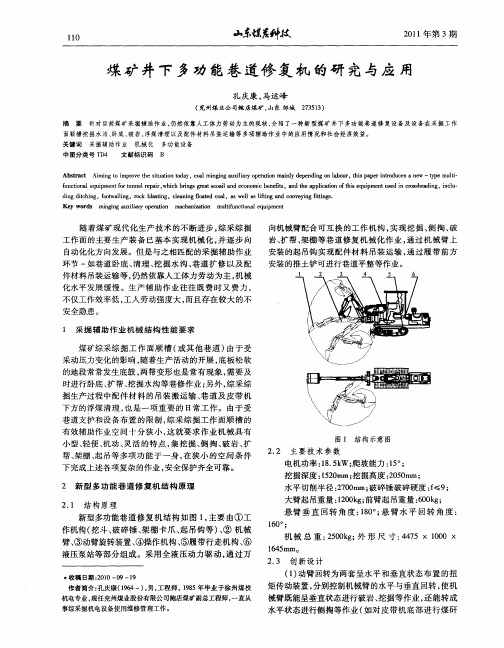
图 1 结构示意 图
2 2 主 要技术 参 数 . 电机功 率 :85 W; 1. k 爬坡能力 :5 ; 1 。 挖掘深度 : 2 m 挖掘 高度 :0 nn 破 碎锤 破碎硬度 :≤9 2 0u ; 7 f ; 大臂起 吊重量 :20 g 前臂起 吊重量 :0 k ; 10 k ; 6 0 g 悬 臂 垂 直 回转 角 度 : 8 。 悬 臂 水 平 回转 角 度 : 10 ;
安全隐患。 1 采 掘辅助 作业 机械 结构 性 能要求
煤矿综采综 掘工 作 面顺 槽 ( 或其 他巷 道 ) 由于受 采动压力变化 的影响 , 随着生产活动 的开展 , 底板松 软 的地段常常发生底鼓 , 两帮变形也是常有 现象 , 需要及 时进行卧底 、 扩帮 、 挖掘水沟等巷修作业 ; 另外 , 采综 综 掘生产过程 中配 件材 料 的吊装搬 运输 、 道及皮 带机 巷 下方 的浮煤清 理 , 也是 一项重 要 的 日常 工作 。由于受 巷道支护和设备 布置 的 限制 , 综采综 掘工作 面顺 槽 的 有效辅助作业空 间十 分狭小 , 这就要 求作业 机械 具有 小型 、 轻便 、 机动 、 活 的特点 , 灵 集挖 掘、 掏、 岩 、 侧 破 扩 帮、 架棚 、 吊等多项 功 能于一 身 , 起 在狭 小 的空间 条件 下完成上述各项复杂 的作业 , 安全保护齐全可靠 。
面顺槽挖掘水 沟、 卧底 、 破岩 、 浮煤清理 以及配件材料 吊装运输等多项辅助作 业中的应用情 况和社会经济效益。 关键词 采掘辅助作 业 机械化 多功 能设备
中 图分 类号 T 4 D 文 献标 识 码 B
Ab ta t Ai n oi rv h i aintd y,ca n iga xlayo eainmanyd p n igo a o r hsp p rito u e e —tp l — sr c migt mpo et est t a u o o o lmign u iir p rt il e e dn nlb u ,ti a e rd c san w o n y emut i
浅谈煤矿巷道修护机
浅谈煤矿巷道修护机摘要:介绍了什么是煤矿巷道修护机,煤矿巷道修护机的技术背景,煤矿巷道修护机的基本工作原理,并结合实际的施工过程简单的诉述一下煤矿巷道修护机的施工方式和施工工序以及配置的设备,将煤矿巷道修护机与传统巷道修路工序进行比较。
总结出煤矿巷道修护机的具体优势。
关键词:煤矿巷道修护机;基本工作原理;施工方式;优势随着我国煤矿井下高产高效技术的全面推广,井下辅助运输机械的应用越来越多,机械化程度越来越高,很多井下辅助运输机械需要借助导轨进行运动,故对井巷底面的平整度的检验也成为矿山井巷验收标准及检验评定的一项重要指标,井巷底面的平整度一般要求小于等于50mm。
但是初期,掘进机工作后的底板难以达到要求,另外对于长期使用的矿(巷)道,由于设备碾压,地层应力释放,很多矿道会出现鼓包,塌陷等状况,所以矿道初期建设时需要对底板进行修建,对于已经使用的煤矿矿下地面也需要经常派出人员进行维护。
现在的建设维修工作多以人工用锤子凿平地面作业为主,这种方法费时费力,劳动量大,严重影响煤矿井下高产高效技术的推广。
煤矿巷道修护机设备就是为了解决这种传统低效的工作方式,以达到煤矿作业高效高机械化目标而研发出来的。
煤矿巷道修护机的铣刨技术主要目的是:通过带有刀头的铣刨鼓高速旋转对地面进行切削作业(铣刨作业)来达到平整地面的目的,通过对矿下施工环境的调研,针对井巷的初期建设与日常维护,开发设计一种的煤矿巷道修护机,这一设备若投入使用可大大缩短井巷修建与维护的时间,大大的减轻了矿下工人的作业、维护负担。
由于该产品是专门用于井巷作业,所以安全性也必须全部合乎有关标准。
下面我就在煤矿巷道修护机的基本结构、基本工作原理、施工方式和煤矿巷道修护机的优越性等几个方面来介绍一下煤矿巷道修护机,也希望能够给工作在煤矿机械相关岗位的朋友一些帮助。
1、煤矿巷道修护机的基本结构煤矿巷道修护机主要有:机架、动力装置、前桥、后桥、铣刨装置、液压系统、电气系统、防爆系统、消尘冷却系统等组成。
巷道修复机的研究及应用

巷道修复机的研究及应用分析现有煤矿巷道掘进、修复施工类设备行走机构的工作特点,研究开发一种适应多功能工具部的煤矿用巷道修复机行走机构,满足修复机快速调车、大力铲装推进、大坡度行驶工作、底盘空间狭小、结构紧凑、底部具备运输通道等具体工况要求。
标签:修复机;行走机构;多功能;驱动装置一、巷道概况受深部地压和采动压力的影响,华丰煤矿-1100m大巷(矸石井下车场进车线以西)U型棚变形,背板断裂,底板底鼓量较大;巷道下帮岩石破碎,支护失效。
现局部净宽在3.2-4.0m,净高在3.2-3.6m,为确保支护质量,保证运输及管线敷设的需要,由我单位对该段巷道扩修。
二、巷道布置及支护说明我单位施工的-1100m大巷扩修荒断面为17.31㎡,支棚后断面为14.2㎡,采用直墙半圆拱断面,锚网喷支护后打设注浆锚索并支设U型棚作加强支护。
永久支护:采用锚网喷支护作为永久支护,顶部另打7根五花锚杆作为加强支护。
一次支护顶部打7根锚杆使用MSGLD-600(X)等强螺纹钢树脂锚杆,其余位置锚杆使用MSGLD-335等强螺纹钢树脂锚杆,使用8#铁丝编织而成的经纬网,喷射C18混凝土(水泥、石子、砂子),喷体总厚度不低于100mm。
加强支护:巷道顶部按照1200×2000mm的间排距打设注浆锚索,打锚索后集中复棚作加强支护。
U棚为三节对称式直腿半圆拱U29可缩支架,棚距中~中为1000mm。
三、巷道岩层情况该巷道位于煤8(2)上部的细砂岩,岩石性脆波状交错斜层理发育,且受压后易冒落,属Ⅲa类。
四、巷道施工情况该巷道前37米施工时由西向东扩修,前15米施工时使用打眼爆破的方式,然后使用巷道修复机配合扒装机施工。
施工至矸石井车场进车线三岔口后,采用巷道修复机由原扩修位置由东向西使用巷道修复机施工。
五、使用巷道修复机及打眼爆破工序情况六、使用巷道修复机及打眼爆破对比优点:1、使用巷道修复机破岩时施工人员不用进入迎头,防止了顶板掉矸砸伤人员的情况,彻底消除了顶板事故,确保了无人则安,做到了本质安全。
巷道修复机在平煤天安煤业一矿的应用研究

巷道修复机在平煤天安煤业一矿的应用研究摘要:平煤天安煤业一矿现开采的煤层赋存厚度一般在1.6~2.3m之间,而掘进高度在2.6~3.3m之间,造成巷道底板全部为岩,而我矿现在埋深最深处已近千米,围岩压力大,巷道底鼓现象特别明显,采用人工拉底时,需要投入大量的人员,且效率很低。
通过引进WPZ-37/600煤矿用巷道修复机,每班只需要2名职工进行操作(一名司机,一名配合拉、移电缆和替换作业),人行侧及皮带下方可以直接用巷道修复机进行掏挖装皮带,且掏挖超深0.3m左右,然后人工将-32080机巷外段拉底用时10天全皮带里侧的渣直接散到皮带下方及人行侧,丁6部结束。
该设备适用于井下环境恶劣、狭小空间,特别对巷道拉底时,更能发挥其优势。
不但加快了拉底的施工进度,还降低了职工的劳动强度,为煤矿的安全、高效生产做出一定的贡献。
关键词:巷道修复机巷道拉底狭小空间破碎装载一、项目研究背景及意义:平煤天安煤业一矿现开采的煤层赋存厚度一般在1.6~2.3m之间,而掘进高度在2.6~3.3m之间,造成巷道底板全部为岩,而该矿现在埋深最深处已近千米,围岩压力大,巷道底鼓现象特别明显,采用人工拉底时,需要投入大量的人员,且效率很低。
由于当前人员紧张,巷道拉底工程量大,为了加快拉底进度,减少人员的投入,降低工人的劳动强度,平煤天安煤业一矿引进了华泰WPZ-37/600煤矿用巷道修复机。
二、研究的内容和技术关键:(一)项目主要研究内容:0.5~1.0m,约2008m3。
采用人工风、手镐配合拉底,每人每班可以拉底约3m3(折合长度1m),全部采用人工拉底约630个工,我单位全部投入需32天。
华泰WPZ-37/600煤矿用巷道修复机投入使用后,每班只需要2名职工进行操作(一名司机,一名配合拉、移电缆和替换作业),人行侧及皮带下方可以直接用巷道修复机进行掏挖装皮带,且掏挖超深0.3m左右,然后人工将皮带里侧的渣直接散到皮带下方及人行侧,丁-32080机巷外段拉底用时10天全部结束。
履带式管道巡检修复机器人弯管通过性研究

2023年第47卷第4期Journal of Mechanical Transmission履带式管道巡检修复机器人弯管通过性研究李健1闫宏伟1刘翼1寇子明2张登崤3(1 中北大学机械工程学院,山西太原030051)(2 太原理工大学机械与运载工程学院,山西太原030024)(3 山西宏安翔科技股份有限公司,山西运城044000)摘要管道在能源的运输方面具有重要的作用,其安全、合理、稳定的运行具有重要的意义。
以DN250~350 mm的油气管道为主要应用场景,设计了一种以丝杆螺母变径机构达到自适应目的的履带式管道巡检修复机器人。
该履带式管道巡检修复机器人分为驱动单元、检测单元、连接单元和隔离修复单元。
通过几何分析研究管道几何约束对弯管通过性的影响可知,当该机器人组成单元的长度小于452.88 mm时,从几何约束角度分析可以通过弯管;运用坐标转化法对机器人运行过程进行了运动状态分析,研究该管道机器人的运动特性,得到该机器人的速度方程。
由分析可知,履带式机器人采用3履带差速特性的方式通过弯管时运动更加平稳。
采用仿真分析的方式,验证了其对弯曲管道形态的通过性。
该研究可为油气管道的稳定巡检、应急安防与处理处置提供参考。
关键词油气管道履带式巡检修复弯管通过性Adams仿真分析Research on the Elbow Passing Ability of Crawler Pipeline Inspection and Repair Robots Li Jian1Yan Hongwei1Liu Yi1Kou Ziming2Zhang Dengxiao3(1 School of Mechanical Engineering, North University of China, Taiyuan 030051, China)(2 College of Mechanical and Vehicle Engineering, Taiyuan University of Technology, Taiyuan 030024, China)(3 Shanxi Hong'anxiang Technology Co., Ltd., Yuncheng 044000, China)Abstract The pipeline plays an important role in the transportation of energy, and its safe, reasonable and stable operation is of great significance. This study takes DN250-350 mm oil and gas pipelines as the main application scenario, and plans to design a crawler-type pipeline inspection and repair robots that use a screw nut reducing mechanism to achieve diameter reduction to achieve self-adaptive purposes. The crawler-type pipeline inspection and repair robot can be divided into a drive unit, a detection unit, a connection unit and an isolation repair unit. When the length of the constituent unit of the robot is less than 452.88 mm, it can pass through the elbow from the analysis of geometric constraints. The speed equation of the robot can be obtained by analyzing the motion state of the robot during the running process by the coordinate transformation method. The crawler robot moves more smoothly when passing through the bend with the 3-track differential characteristic. By means of simulation analysis and experimental verification, the passing ability of the elbow is verified. The research on the passing ability of the crawler-type pipeline inspection and repair robot can provide some references for the stable inspection, emergency security and treatment of oil and gas pipelines.Key words Oil and gas pipelines Crawler type Inspection and repair Elbow passing performance Adams simulation analysis0 引言油气管道是油气能源的主要输送工具,随着使用年限增加,由于自然损坏、人为干扰或流体腐蚀等多种因素的影响,极易在流体输送过程中发生裂纹或破损等现象,若不能及时检测,一旦发生事故,就会对人们的生产生活造成巨大的影响[1-3]。
巷道修复机专项安全风险辨识评估报告(2019)

巷道修复机专项安全风险辨识
评估报告
XX煤矿
二〇一九年三月二十八日
WPZ-55/900型巷道修复机专项安全风险辨识
人员名单
一、设备概况
煤矿井下使用WPZ-55/900型巷道修复机进行巷道修复工作,为保证修复机的安全运行,对修复机进行专项风险辨识。
二、设备参数
巷道修复机型号:WPZ-55/900
装机功率:55KW
液压系统额定压力:27.5Mpa
液压系统最大流量:140L/min
行走驱动方式:集成液压马达减速器驱动履带行走
爬坡能力:30°
三、风险辨识评估方法
(一)安全风险辨识的方法:经验对照分析法
(二)安全风险评估的方法:风险矩阵分析法
四、评估时间地点
2019年3月28日矿调度会议室
五、评估人员
组织者:
参与人员:
六、风险类型确定
按照设备使用过程中可能导致的事故和伤害类型,确定该设备存在的风险类型有:
机电(触电、机械伤害):设备运转、检维修作业等过程中,
可造成机械伤害、人员触电事故。
运输:设备在斜面上行驶、移动过程中可发生倾斜、侧翻挤伤人员运输事故。
物体打击:设备工作时,挖斗、破碎锤和铣挖头运转可发生煤矸及异物飞出伤人事故。
瓦斯爆炸:周围瓦斯超限,设备转动或漏电产生电火花会导致瓦斯爆炸风险。
七、危害因素辨识
根据设备确定存在的风险类型,逐一辨识导致该风险的各类危害因素。
辨识情况如下表:
危害因素辨识表
八、辨识结论
经辨识评估,设备在运行期间存在的一般风险有:机电(触电、机械伤害)5项、运输1项、物体打击2项、瓦斯爆炸1项。
九、风险管控清单
7
8。
电动履带式桩机的仿真模拟与优化设计方法探讨
电动履带式桩机的仿真模拟与优化设计方法探讨电动履带式桩机是一种常用于基础建设领域的工程机械,其主要功能是在土地或者岩石中钻孔并安装或移除桩基。
随着科技的发展,仿真模拟和优化设计方法在工程领域的应用越来越广泛。
本文将探讨电动履带式桩机的仿真模拟与优化设计方法。
首先,我们来介绍电动履带式桩机的基本原理。
电动履带式桩机是一种通过电动机驱动履带前进和旋转的机械设备。
它通常由车体、履带、旋挖头和控制系统等部件组成。
在施工过程中,电动履带式桩机通过旋挖头上的钻杆钻入地面,并将桩基材料挖除或安装新的桩基。
其履带设计使其具备在各种地形和环境下工作的能力,并能方便地进行移动和定位。
仿真模拟是一种通过计算机模拟真实环境和工程施工过程的方法。
对于电动履带式桩机的仿真模拟,我们可以使用计算机软件对桩机的运动、工作过程、施工效率等进行模拟和分析。
通过仿真模拟,我们可以更好地了解桩机在不同工况下的工作状态,找出问题所在,并优化设计方案。
在电动履带式桩机的仿真模拟中,我们需要考虑以下几个方面:首先是机械结构和动力系统的建模。
通过建立准确的机械结构模型和动力系统模型,我们可以模拟桩机在不同工况下的受力、变形和运动状态。
其次是土壤和岩石的模型。
土壤和岩石的性质对桩机的工作效果有很大影响,因此在仿真模拟中需要准确地描述土壤和岩石的力学性质。
最后是施工过程的模拟。
桩机在施工过程中需要考虑的因素很多,包括旋挖头的转速、钻杆的进给速度、土壤和岩石的性质等。
通过模拟这些因素,我们可以评估不同施工方案的效果,并找出最优的设计方案。
除了仿真模拟,优化设计方法也是提高电动履带式桩机性能的重要手段。
优化设计方法通过数学建模和计算方法,寻找最优的设计参数和工艺方案,以提高桩机的施工效率和性能。
在电动履带式桩机的优化设计中,我们可以采用遗传算法、粒子群算法等优化算法,通过对设计参数的搜索和优化,找到最佳的设计方案。
优化设计方法可以帮助我们提高桩机的工作效率,减少施工成本,并提高施工质量。
矿用履带式管道清洁机器人的改进与运动学仿真

矿用履带式管道清洁机器人的改进与运动学仿真李怡伸【摘要】通风管道的通畅直接关系到煤矿的正常生产.现有大多数矿用履带式管道清洁机器人方案的承重轮固连在车体上,在行走过程中容易引起较大的振动和冲击,与管壁的接触面积也较小,履带磨损较大.针对此缺陷设计了一种改进型履带机器人,对承重轮的连接形式进行了改进.通过分析固定型和改进型矿用履带式管道机器人的爬坡过程,并利用RecurDyn对二者的爬坡过程进行运动学仿真,经过比较,验证了改进型机器人的优越性.【期刊名称】《煤矿机电》【年(卷),期】2015(000)001【总页数】3页(P86-87,90)【关键词】矿用管道清洁;履带机器人;爬坡性能;运动学仿真【作者】李怡伸【作者单位】华晋焦煤有限责任公司沙曲煤矿,山西吕梁033300【正文语种】中文【中图分类】TH693.90 引言煤矿中使用的通风管道会因灰尘堆积造成管道不畅,送风不清洁,增加风机负载,缩短风机使用寿命,因此需要采用管道清洁机器人清理管道[1]。
现有的固定式履带机器人的行走机构较为简易,主动轮、诱导轮和负重轮的转动轴均固定在车体上,爬坡性能较差,引起的振动和冲击也较大。
因此,对这种行走机构进行了改进设计,并用动力学仿真软件RecurDyn 对爬坡过程进行运动学仿真,验证了改进型履带式管道机器人爬坡性能的优越性。
1 两种履带机器人爬坡过程分析1.1 固定式履带机器人爬坡过程分析固定式履带机器人爬坡过程,如图1 所示。
图1 固定式履带机器人爬坡过程示意图第一阶段,履带车处于静平衡位置。
第二阶段,前履带的前负重轮与斜面接触,而后负重轮悬空,后履带的前负重轮也翘起悬空。
第三阶段,前履带的前负重轮爬上斜坡,着地前行,前履带的后负重轮和后履带的前负重轮仍处于悬空状态,车体质心水平移动,直到前履带的后负重轮爬上斜坡,使车体质心升高。
第四阶段,前履带已完全爬上斜坡,后履带开始与斜面接触,前履带的前负重轮和后履带的后负重轮处于悬空位置,车体质心逐渐升高直至整车爬上斜坡。
煤矿巷道修复机机械臂运动学建模及仿真

煤矿巷道修复机机械臂运动学建模及仿真
李驰
【期刊名称】《煤矿机械》
【年(卷),期】2024(45)5
【摘要】以WPZC-150/2100L型巷道修复机为研究对象,采用几何法和D-H法建立了巷道修复机机械臂的数学模型,使用蒙特卡洛法分析了机械臂的工作空间,并使用ROS中的MoveIt功能包求逆解及路径规划,通过rviz实时显示机械臂的位置并控制其运动。
将路径规划的结果传递给控制器,实现了液压机械臂的控制。
【总页数】4页(P119-122)
【作者】李驰
【作者单位】中煤科工机器人科技有限公司
【正文语种】中文
【中图分类】TD266
【相关文献】
1.五自由度机械臂运动学系统建模与仿真
2.基于P-Rob六自由度机械臂运动学建模与仿真
3.液压支架油缸内壁缺陷修复机械臂的运动学分析与仿真
4.煤矿巷道开槽机械臂构型设计及运动学特性分析
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
mo d e l s o f b o o m a n d b u c k e t r o d a r e e s t a b l i s h e d f o r s i mu l a t i o n a n a l y s i s v i a f i n i t e e l e me n t s o f t wa r e . As s u c h , i t i S f o u n d t h a t t h e ma x i mu m s t r e s s a n d d i s p l a c e me n t o f b o o m a r e 2 9 1 . 7 3 0 MP a a n d 0. 2 8 9 0 0 0 mm , r e s p e c t i v e l y, wh e r e a s t h e ma x i mu m s t r e s s a n d d i s p l a c e me n t o f b u c k e t r o d a r e 1 0 2 . 6 6 0 0 0 0 MP a a n d 0 . 0 9 6 2 2 1 mm , r e s p e c t i v e l y . Ac c o r d i n g l y, t h e s t r e n g t h a n d s t i f f n e s s r e q u i r e me n t s a r e s a t i s f i e d. Th e r e i n ,
阚 志涛 , 张 幼振 , 邵 俊 杰
( 中煤 科 工 集 团 西 安 研 究 院 有 限 公 司 , 陕西 西安 7 1 0 0 7 7 )
摘要: 在工作过程 中, 煤矿用履带式巷道修 复机工作 机构 容易受 到较 大的 冲击力 , 使 薄弱 部位产 生变 形甚 至断 裂. 对修复机工作机构在挖掘工况下进行 受力分析 , 建立煤矿 用履带 式巷道修复机的动臂和斗杆 的三维模型 , 并 利用有限元分析软件进行仿真分析 . 结果 表明 : 煤矿用履带 式巷道修复机动臂 的最大应力 为 2 9 1 . 7 3 0 MP a , 最大
Abs t r a c t: Th e wo r k i n g mec h a ni s m o f c o l l i e r y c r a wl e r r o a dwa y r e pa i r ma c hi ne s i s e a s i l y i mp a c t e d d u r i ng wor k i ng pr o c es s t o pr o d u c e we a k p o s i t i o n d e f o r ma t i o n e v e n f r a c t ur e. Ba s e d o n t he l o a di n g a na l ys i s, t he 3 D
中图分类号 : T H 1 1 4 文献标志码 : A 文章 编 号 : 1 6 7 2~5 5 8 1 ( 2 0 1 4 ) 0 4—0 3 4 6— 0 5
Si m ul a t i o n a nal ys i s o n wo r ki ng me c hani s m f o r c o l l i e r y c r aw l e r r oa dw a y r e pa i r m ac hi ne s
KA NZ h i . t a o,Z H AN G Y o u — z h e n,S H AO J u n - j i e
( C CTEG Xi ’ a n Re s e a r c h I n s t i t u t e,Xi ’ a n 71 0 0 7 7,Ch i n a )
位 移为 0 . 2 8 9 0 0 0 mm , 斗杆的最大应 力为 1 0 2 . 6 6 0 0 0 0 MP a , 最大位 移为 0 . 0 9 6 2 2 1 mm, 均 满 足 强 度 和 刚 度 要 求, 验 证 了结 构 设 计 的合 理 性 .
关键词 : 巷道 ; 底鼓; 修复机 ;工作机构 ; 仿真 分析
t h e s t r u c t ur a l d e s i g n r a t i o na l e i s v e r i f i e d t o p r o vi d a b a s i s f o r f u r t he r o p t i mi z a t i o n o n wor ki ng mec h a ni s m. Ke y wo r ds:r o a dwa y;f l o o r h e a ve;r e p a i r ma c h i n e;wo r ki n g me c h a ni s m ;s i mul a t i o n a na l y s i s
第 1 2卷 第 4期 2 0 1 4年 8月
中
国
工
程
机
械
学
报
Vo 1 . 1 2 No. 4 Au g.2 01 4
C HI NES E J ( ) UR NAL OF C ONS TRUC TI ON MA CHI NERY
煤 矿 用 履 带 式 巷 道 修 复 机 工 作 机 构 的 仿 真 分 析