XMC4000中文参考手册-第07章 存储器组织
C4000中文操作手册
• 产品组态
对那个产品进行组态? P01 ... P08 (1-8 种产品用户自行定义) • 定义产品名称 新名字: • 定义结果 M01 ... M04 (1-4 种结果用户自行定义) 定义名称 功能 X 毫安输入 X 线性化 量程起点 量程终点 单位 格式 • 线性化定义 需要定义那组线性表? L01 ... L16 (1 - 16 个线性段/ 用户自行定义) 起名 01 ... 11个点对应的输入输出 • 设定报警点 那个继电器节点输出需要设定? 报警输出 01 到 报警输出 03 结果 报警点设定 多少秒后报警 报警类型
按下 CLEAR 键
12
C4000 型控制器
3 基础设定
3.2 菜单语言选择Language assortment
进入到菜单页选择合适的 语言 用▲▼键选择 LANGUAGE/SPRACHE 条目,然后ENTER确认
则得到根目录Language / Sprache下面的子目录显 示, 用▲▼键选择所要的 语言,按键ENTER.确认选 择的语言。
Optek输入 通道1 通道2 通道3 通道4
毫安输入 毫安输入1 毫安输入2
传感器1系统数据 型号 系列号 光程长 波长 Optek输入端 电缆长
传感器2系统数据 型号 系列号 光程长
10
C4000 型控制器
波长 Optek输入端 电缆长
• 服务
系统清零设定 系统诊断 传感器匹配
功能 系数 毫安输入校准 毫安输入 校准 毫安输出校准 毫安输出 校准 服务
页码
4 5
6 7 8
12 13 14 15 16 18
19 20 21 22 23 24 25 26 27
Infineon Technologies AG XMC4000家庭应用板用户手册(第1版,2012

Hexagon Application Kit For XMC4000 FamilyAUT_ISO-V1Automation I/O CardBoard User's Manual Revision 1.0, 2012-02-28Edition 2012-02-28Published byInfineon Technologies AG81726 Munich, Germany© 2012 Infineon Technologies AGAll Rights Reserved.Legal DisclaimerThe information given in this document shall in no event be regarded as a guarantee of conditions or characteristics. With respect to any examples or hints given herein, any typical values stated herein and/or any information regarding the application of the device, Infineon Technologies hereby disclaims any and all warranties and liabilities of any kind, including without limitation, warranties of non-infringement of intellectual property rights of any third party.InformationFor further information on technology, delivery terms and conditions and prices, please contact the nearest Infineon Technologies Office ().WarningsDue to technical requirements, components may contain dangerous substances. For information on the types in question, please contact the nearest Infineon Technologies Office.Infineon Technologies components may be used in life-support devices or systems only with the express written approval of Infineon Technologies, if a failure of such components can reasonably be expected to cause the failure of that life-support device or system or to affect the safety or effectiveness of that device or system. Life support devices or systems are intended to be implanted in the human body or to support and/or maintain and sustain and/or protect human life. If they fail, it is reasonable to assume that the health of the user or otherTrademarks of Infineon Technologies AGAURIX™, C166™, CanPAK™, CIPOS™, CIPURSE™, EconoPACK™, CoolMOS™, CoolSET™, CORECONTROL™, CROSSAVE™, DAVE™, EasyPIM™, EconoBRIDGE™, EconoDUAL™, EconoPIM™, EiceDRIVER™, eupec™, FCOS™, HITFET™, HybridPACK™, I²RF™, ISOFACE™, IsoPACK™, MIPAQ™, ModSTACK™,my-d™, NovalithIC™, OptiMOS™, ORIGA™, PRIMARION™, PrimePACK™, PrimeSTACK™, PRO-SIL™, PROFET™, RASIC™, ReverSave™, SatRIC™, SIEGET™, SINDRION™, SIPMOS™, SmartLEWIS™, SOLID FLASH™, TEMPFET™, thinQ!™, TRENCHSTOP™, TriCore™.Other TrademarksAdvance Design System™ (ADS) of Agilent Technologies, AMBA™, ARM™, MULTI-ICE™, KEIL™, PRIMECELL™, REALVIEW™, THUMB™, µVision™ of ARM Limited, UK. AUTOSAR™ is licensed by AUTOSAR development partnership. Bluetooth™ of Bluetooth SIG Inc. CAT-iq™ of DECT Foru m. COLOSSUS™, FirstGPS™ of Trimble Navigation Ltd. EMV™ of EMVCo, LLC (Visa Holdings Inc.). EPCOS™ of Epcos AG. FLEXGO™ of Microsoft Corporation. FlexRay™ is licensed by FlexRay Consortium. HYPERTERMINAL™ of Hilgraeve Incorporated. IEC™ of Commission Electrotechnique Internationale. IrDA™ of Infrared Data Association Corporation. ISO™ of INTERNATIONAL ORGANIZATION FOR STANDARDIZATION. MATLAB™ of MathWorks, Inc. MAXIM™ of Maxim Integrated Products, Inc. MICROTEC™, NUCLEUS™ of Mentor Graphics Corporation. Mifare™ of NXP. MIPI™ of MIPI Alliance, Inc. MIPS™ of MIPS Technologies, Inc., USA. muRata™ of MURATA MANUFACTURING CO., MICROWAVE OFFICE™ (MWO) of Applied Wave Research Inc., OmniVision™ of OmniVision Technologies, Inc. Openwave™ Openwave Systems Inc. RED HAT™ Red Hat, Inc. RFMD™ RF Micro Devices, Inc. SIRIUS™ of Sirius Satellite Radio Inc. SOLARIS™ of Sun Microsystems, Inc. SPANSION™ of Spansion LLC Ltd. Symbian™ of Symbian Software Limited. TAIYO YUDEN™ of Taiyo Yuden Co. TEAKLITE™ of CEVA, Inc. TEKTRONIX™ of Tektronix Inc. TOKO™ of TOKO KABUSHIKI KAISHA TA. UNIX™ of X/Open Company Limited. VERILOG™, PALLADIUM™ of Cadence Design Systems, Inc. VLYNQ™ of Texas Instruments Incorporated. VXWORKS™, WIND RIVER™ of WIND RIVER SYSTEMS, INC. ZETEX™ of Diodes Zetex Limited.Last Trademarks Update 2011-02-24Table of ContentsTable of Contents1Overview (7)1.1Key Features (7)1.2Block Diagram (8)2Hardware Description (8)2.1ISOFACE OUT (9)2.2ISOFACE IN (9)2.3IO Expander (10)2.4Power (11)2.5Satellite Connector (12)3Production Data (13)3.1Schematics (13)3.2Layout and Geometry (16)3.3Bill of Material (17)List of FiguresFigure 1Automation I/O Card (AUT_ISO-V1) (8)Figure 2Automation I/O Card Interfaces (8)Figure 3Power Circuit (11)Figure 4ACT Satellite Connector (12)Figure 5Satellite Connector Type ACT (12)Figure 6Satellite Connector, IO Expander, Power (14)Figure 7ISOFACE (15)Figure 8Automation I/O Card Layout (16)List of TablesTable 1ISOFACE OUT Connector Pinout (9)Table 2ISOFACE OUT signal connection to the Satellite Connector (9)Table 3ISOFACE IN Connector Pinout (9)Table 4ISOFACE IN signal connection to the Satellite Connector (10)Table 5GPIO channel LED/SMD pad mapping (10)Table 6IO Expander I2C signal connection to the Satellite Connector (10)Table 7Power LED’s (11)Table 8PowerScale Jumper (11)Table 9Automation I/O Card BOM (17)OverviewIntroductionThis document describes the features and hardware details of the Automation I/O Card (AUT_ISO-V1) designed to work with Infineon’s XMC4500 CPU board. This board is part of Infineon’s Hexagon Application Kits.1 OverviewThe AUT_ISO-V1 board is an application expansion satellite card of the Hexagon Application Kits. The satellite card along with a CPU board (e.g. CPU_45A-V2 board) demonstrates ISOFACE capabilities together with XMC4500. The focus is safe operation under evaluation conditions. The satellite card is not cost optimized and cannot be seen as reference design.1.1 Key FeaturesThe AUT_ISO-V1 satellite card is equipped with following featuresConnection to CPU board (e.g. CPU_45A-V2) via satellite connector ACTISOFACE OUT, up to 8 channelsISOFACE IN, up to 8 channelsI2C based IO expander up to 8 channelsPower supplyo Powerjack for external 24 V supplyo From CPU board via ACT satellite connector1.2Block DiagramFigure 1 shows the block diagram of the AUT_ISO-V1 satellite card. There are following building blocks:Figure 1Automation I/O Card (AUT_ISO-V1)2 Hardware DescriptionThe following sections give a detailed description of the hardware and how it can be used.Figure 2 Automation I/O Card InterfacesISOFACE OUT (ISO1H812G)ISOFACE IN (ISO1I811T)Power 3.3 V (IFX1763SJV33)ISOFACE IN ConnectorACT Satellite ConnectorPower Jack24 V2.1 ISOFACE OUTISOFACE output device used in AUT_ISO-V1 satellite card is ISO1H812G. It is supplied by VDD3.3 on the CPU side and VDD24 for the ISOFACE OUT side. VDD24 and GNDISO can to be connected either by X300 or by X240(24 V external power jack). This is the same net that supplies the DC/DC converter. VDD24 is +24 Vdc (referred to GNDISO)Table 1 below gives the signal details of ISOFACE OUT connector.Table 12 below gives the details of SPI signal connection to the satellite connector.2.2 ISOFACE INISOFACE input device used in AUT_ISO-V1 satellite card is ISO1I811T. It is supplied by 3.3 V on the CPU side and VBB (24V) for the ISOFACE IN side. VBB and GNDBB need a separate connection to 24 V external power source through connector X320.Resistor R337 is used on board for setting input type to IEC61131-2 Type 1.Resistors R326 and R327 sets the frequency of ISOFACE IN to 100 kHz (default).Table 3 gives the details of ISOFACE IN connector pin mapping.Table 3 ISOFACE IN Connector PinoutISOFACE IN shares the same SPI lines with ISOFACE OUT except the chip select as shown in Table 4.2.3 IO ExpanderThe AUT_ISO-V1 satellite card supports GPIO expansion though I2C IO-Expander on board (U230). The I2C Address for IO expander device is 0x1001000X. The satellite card supports 8 such GPIO’s. All t he GPIO’s are connected to LEDs (V230-V237) and SMD-Pads (TP230 – TP237). The Table 5 gives the GPIO channel and corresponding LED/PAD mapping.Table 6 shows the connection of the IO Expander device to the ACT satellite connector.2.4 PowerThe AUT_ISO-V1 satellite card can be supplied by an external power supply (24 V / 1 A) to be connected to the power jack X240 or by a 5 V supply via the 80-pin ACT satellite connector. An external power supply is necessary only in case the current coming via the ACT satellite connector is not sufficient.A DC-DC converter on board (U240) steps down the input voltage from the power jack X240 to 5 V (VDD5). The input voltage can be in the range from 12 V to 24 V. An on board linear voltage regulator is generating a 3.3 V (VDD3.3) power supply out of the VDD5.Figure 3 Power CircuitA Diode V242 protects the reverse flow of current to an external source. Therefore a simultaneous power supply of the satellite boards via both the power jack and the satellite connector with not harm.LED V210 indicates the presence of 5 V power and LED V211 indicates the presence of 3.3 V power.Table 7 Power LED’sThe AUT_ISO-V1 satellite card supports a PowerScale probe for power measurement purpose.Table 8 PowerScale Jumper2.5 Satellite ConnectorThe satellite connector of the AUT_ISO-V1 satellite card interfaces it’s the signals to a CPU board e.g. CPU_45A-V2. Take care to connect the ACT satellite card always to the corresponding ACT satellite connector of the CPU board only.Figure 4 ACT Satellite ConnectorThe signal mapping of the ACT satellite connector and correponding CPU function are provided in figure 6Figure 5 Satellite Connector Type ACT3 Production Data3.1 SchematicsThis chapter contains the schematics for the Automation I/O Card:Satellite Connector, IO Expander, PowerISOFACEFigure 6 Satellite Connector, IO Expander, PowerFigure 7 ISOFACE3.2 Layout and GeometryFigure 8 Automation I/O Card Layout3.3 Bill of MaterialTable 9 Automation I/O Card BOMTable 9 Automation I/O Card BOMw w w.i n f i n e o n.c o mMouser ElectronicsAuthorized DistributorClick to View Pricing, Inventory, Delivery & Lifecycle Information:I nfineon:KIT_XMC4x_AUT_ISO-001。
XMC4000中文参考手册-第08章 闪存与程序存储器单元(PMU)

参考手册 PMU,V1.18
8-6
V1.2, 2012-12 请遵守产品信息使用协议
XMC4500 XMC4000 家族
闪存与程序存储单元(PMU)
字线:一条“字线”由两页组成,一个偶数页和一个奇数页。在 PFLASH 中一条字线包含 512 字节对齐。 页:“页”是一条字线正在编程的部分。在 PFLASH 中一页包含一个 256 字节对齐组。 闪存结构
8.1.1
PMU 框图如图 8-1 所示。
图 8-1
PMU 框图
8-1 V1.2, 2012-12 请遵守产品信息使用协议
ห้องสมุดไป่ตู้
参考手册 PMU,V1.18
XMC4500 XMC4000 家族
闪存与程序存储单元(PMU)
8.2
Boot ROM(BROM)
在 PMU0 中的 Boot ROM 有 16KB 的容量。BROM 包含的固件有: 启动程序 引导程序装载软件
预取单元的作用是减少更高系统频率下的闪存延迟差距,以增强每周期指令性能。 8.3.1 概述
预取单元将性能和闪存的数据访问按如下配置分开: 4K 字节指令缓冲区 — 双向设置关联 — 最近最少使用(LRU)的替换策略 — 缓存线大小:256 位 — 关键字优先 — 流动式接收 1) — 线环绕 — 奇偶校验,32 位粒度 — 可旁路缓冲区 — 可全局失效的缓冲区 256 字节数据缓冲区 — 单行缓冲线 — 关键字优先 — 流动式接收 1) — 线环绕 _________________
参考手册 PMU,V1.18
8-5
V1.2, 2012-12 请遵守产品信息使用协议
XMC4500 XMC4000 家族
XMC4000中文参考手册-第09章 窗口看门狗定时器(WDT)

9.8.1
初始化和启动操作
系统复位后,需要完成WDT模块的初始化。 • 检查最后一次系统复位的原因,以确定电源状态 - 读出SCU_RSTSTAT.RSTSTAT寄存器位段,确定最后一次系统复位的原因 - 依据最后系统复位的原因执行适当的操作 看门狗软件初始化序列 用SCU_CLKSET.WDTCEN寄存器位段启用WDT时钟 用SCU_PRCLR2.WDTRS寄存器位段释放WDT复位 用WDT_WLB寄存器设置窗口下限 用WDT_WUB寄存器设置窗口上限 配置外部看门狗服务指示(可选,请参阅SCU/HCU章节) 用SCU_WDTCLKCR寄存器选择和启用WDT输入时钟 用SCU_NMIREQEN寄存器在系统级上启用系统陷阱预警报警(可选,仅用在WDT预警 模式) 软件启动序列 - 选择模式(超时或预警)和用WDT_CTR寄存器启用WDT模块 服务看门狗 - 在WDT_TIM寄存器中,对编程时间窗口检查当前定时器值 - 在有效时间窗内,写魔字到WDT_SRV寄存器 9.8.2 重新配置和重新启动操作 - - - - - - -
参考手册 WDT, V2.3
9-3
V1.2, 2012-12 请遵守产品信息使用协议
XMC4500 XMC4000 家族
窗口看门狗定时器(WDT)
图 9-2
无预警复位
图 9-2中描绘的示例场景展示了在有效时间窗口内WDT模块成功服务后产生的两个连续的服务 脉冲。对于没有服务执行的情况,在计数器的值已经超过窗口上限值后立即触发在wdt_rst_req 输出上的复位请求生成。 9.3 预警模式
在预警模式时,溢出事件的作用在有和没有启用预警是不同的。当预警启用时,计数器第一次 超过上限时触发输出报警信号wdt_alarm。只能在下一个溢出产生复位请求。报警状态通过寄 存器WDTSTS指示且通过寄存器WDTCLR清除。清除报警状态将使WDT回到正常状态。报警 信号发送请求到SCU,在那里上报到NMI。
XMC4000中文参考手册-第06章 灵活的CRC引擎(FCE)
灵活的CRC引擎(FCE)6 灵活的CRC引擎(FCE)FEC提供一个循环冗余码(CRC)算法的并行执行。
现行XMC4500微控制器的FCE版本能实现符合IEEE802.3的以太网CRC32,CCITT的CRC16和SAE J1850的CRC8多项式算法。
FCE的基本目标是作为一个为使用CRC识别标志的软件应用或操作系统服务的硬件加速引擎。
FCE作为一个标准外围总线从设备操作,通过一组配置和控制寄存器实现完全控制。
不同的CRC算法彼此相互独立,它们可以同时用在不同的软件任务上。
注:在6-11页描述为“寄存器”的FCE内核寄存器名称是参考于一个产品参考手册上的模块名称前缀“FCE_”。
参考文献[5] 一个无痛的CRC错误检测算法指南,Ross N.Williams[6] 互联网应用的32字节CRC,Philip Koopman,独立系统和网络(DSN)国际会议,2002相关标准和规范[7] IEEE 802.3 的以太网32位CRC表6-1 FCE涉及的缩写词CRC 循环冗余码FCE 灵活的循环冗余码引擎IR 输入寄存器RES 结果STS 状态CFG 配置6.1 概述本节提供了FCE模块的功能,应用和逻辑结构的概述。
6.1.1 功能FCE提供如下功能:• FCE执行如下的循环冗余码多项式:灵活的CRC引擎(FCE)— CRC内核0和1:IEEE802.3 CRC32以太网多项式:0x04C11DB71) - x32+x26+x23+x22+x16+x12+x11+x10+x8+x7+x5+x4+x2+x+1 —CRC内核2:CCITT CRC16 多项式:0x1021 - x16+x12+x5+1— CRC内核3:SAE J1850 CRC8多项式:0x1D - x8+x4+x3+x2+1• 并行CRC实现—通过FCE计算的数据块会是一个多重二次多项式—通过FCE计算的数据块的开始地址会被排列到二次多项式中• 寄存器接口:— 输入寄存器— CRC寄存器— 配置寄存器启用控制CRC操作和对信息的末端进行自动校验。
XMC4000内核及外设
单精度浮点运算单元(FPU) 灵活的事件处理 嵌套矢量中断控制器(NVIC) 事件请求处理单元 (ERU) DMA 丰富的安全机制 存储器保护单元(MPU) 灵活的CRC校验单元(FCE) WDT
XMC4500 特性简介
片上存储器 高达1024KBytes Flash、4KB程序缓存(ICache) 64KByte PSRAM, 64KBytes DSRAM 32KBytes Communication RAM 通信/人机交互单元 以太网控制器 MultiCAN (3个节点) USB OTG LEDTS SDMMC接口 3个通用串行单元(USIC) 外部总线接口(EBU)
Page 2
XMC4500 结构框图
ARM Cortex-M4F
处理器
FPU ICode
MPU DCode
DEBUG System
DMA0
DMA1
ETH FIFO DMA
USB FIFO DMA
通信接口
PSRAM
DSRAM system comm
程序存储器
BROM FLASH FCE WDT STM RTC
数据存储器
系统控制单元
EBU
通讯接口
AHB 总线矩阵
ADC
Dem
Peripheral Bus A
USIC1 LEDTS DAC
Peripheral Bus B
MCAN SDMMC CCU43 PORTS
CCU40
CCU80 CCU81 POSIF0 POSIF1 EXTINT
USIC2
控制相关 外设
Page 12
其他存储单元特性
BC-4000中文版(详细)
BC-4000系列
用户手册
警告
• 未透彻了解本手册内容之前,请勿安装、操作、 维护和维修。
• 安装、操作、维修和维修时请注意始终保持本手 册可随时查阅。
BC-4000 用户手册 900-3315-07
上海石田电子衡器有限公司
打印计价电子秤
您可通过关注本手册的差错及介绍改 进方法来提供帮助使手册更臻完备。 请把您的意见转达给附近的ISHIDA地 区营销代表。
3.2 标签菜单 ........................................................................................................................................... 15 3.2.1 标签打印设定 ............................................................................................................................. 15 3.2.2 标签格式编辑 ............................................................................................................................. 18
第4章登录模式
4.1 进入/退出登录模式 .............................................................................................. 42
XMC4000学习、应用
英飞凌XMC4000单片机DIY设计与非网英飞凌技术社区经典分享——XMC4000ahui886 车载仪表产品开发简单介绍: XMC4500开发板负责I/O控制,数据采集,按键处理等,通过UART发送相关数据和命令给TFT驱动板,驱动7寸TFT液晶显示屏显示。
实现时间日期显示、时速表、燃油油量、发动机相关参数等功能。
各种按键的设定亦完善了系统功能。
作品已完成,视频是亮点。
elej基于XMC4500 系统板的智能数字充电器设计简单介绍: 制作智能充电器ELEJ-IDBC,预期实现多种功能,如全数字控制、界面显示多种数据,对传统充电方法的优化。
多种办法提高电池安全性很令人期待!作品已完成,用户手册很值得一看。
ddllxxrr温度采集多路输出系统简单介绍:原板图加上温度传感器18B20。
从XMC4500进行温度采集。
然后通过UART ,CAN,及USB 实时传输。
作品已完成。
yang_alex多功能电池充电器简单介绍:多功能电池充电器,PWM开关电源(为了安全采用12V~9V输入),ADC检测电池电压和充电电流。
LCD显示各参数,充电曲线。
USB与PC通讯。
huonululu 基于XMC4500控制系统的动态节能照明电源装置设计简单介绍:设计电路主要由驱动电路、滤波电路、辅助电源等部分组成。
XMC4500作为作为主控制器,完成整个系统采样检测、动作保护、脉冲输出、串口通信等功能。
设计过程中出现并解决的问题,经验笔记等都有分享,初涉英飞凌单片机的同学可参考。
Jimmy 交流电机控制开发简单介绍:利用XMC4000的运算处理能力做一点交流电机的控制,以后可以广泛的推广到工业应用之中常青智能控制系统简单介绍:设计一个简单的控制系统,通过无线网络控制工业、农业设备或者家居设施。
bobcherish传感器的模块化控制简单介绍:基于Cortex™-M4内核不错的性能,以及可靠性设计舵机控制系统。
作品未完成。
大器所成小功率逆变电源设计晕船单相全桥整流器开发【推荐阅读】XMC4000问答XMC4500仿真器和下载问题XMC4000仿真器问题XMC4500串口怎么下关于DAVE教程dave3_demoDAVE3 软件,如何在C程序中嵌入汇编XMC4500F144K1024芯片KEIL软件下载问题XMC4000中 int 表示多少位USIC 波特率问题 新手上路求大侠指点新手上路 xmc4500 UART通信问题 请各位大仙指点有人用过XMC4500的DSD么?求指教关于DAVE开发环境的使用问题1POSIF 正交编码模式下应用问题。
7计算机组成原理(第七章)
3
1、外设的一般功能 、
外设在计算机和其它机器之间、 外设在计算机和其它机器之间、以及计算机和用户之 间提供联系,其主要作用如下: 间提供联系,其主要作用如下: 人机对话的通道 完成数据变换的设备 软件和信息的驻留地 计算机在各领域应用的桥梁 外设种类很多,归纳起来具有以下特点: 外设种类很多,归纳起来具有以下特点: 由信息载体、 由信息载体、驱动装置和控制电路组成 工作速度比主机慢得多 信息类型和结构各不相同 电气特性也不相同
8
2、信息的记录方式 、
在实际应用中,磁性材料写入二进制 或 是靠不同的写入电流 在实际应用中,磁性材料写入二进制0或1是靠不同的写入电流 波形来实现的。形成不同写入电流波形的方式称为记录方式 记录方式。 波形来实现的。形成不同写入电流波形的方式称为记录方式。
调频制:写“1”时,磁头线圈加正向脉冲电流,然后电流归 ;写 归零制: 每个位单元起始处,写电流改变一次方向, 归零制 :每个位单元起始处,写电流改变一次方向,写入信号作为 时 磁头线圈加正向脉冲电流,然后电流归0; 本位的同步信号;位单元中间记录信息, 时位单元中间不变, 本位的同步信号;位单元中间记录信息,写0时位单元中间不变, 时位单元中间不变 “0”时,磁头线圈加负向脉冲电流,写完后电流也归 。归零制具 时 磁头线圈加负向脉冲电流,写完后电流也归0。 改进调频制写“1”时,磁头线圈有正向电流;写“0”时,磁头线圈 :写“1”时,写电流在位单元中间改变一次方向;写 时 写电流在位单元中间改变一次方向; 不归零制: 不归零制: 时 磁头线圈有正向电流; 时 时位单元中间改变一次方向。这样, 时位单元变化1次 写1时位单元中间改变一次方向。这样,写0时位单元变化 次,写 时位单元中间改变一次方向 已经不用。 时位单元变化 有自同步能力,但记录密度低, ;写两个或两个以上“0”时,写电 有自同步能力磁头线圈中始终有电流。无自同步能力,也不用。 一个“ 时,磁头线圈中始终有电流。无自同步能力,也不用。 一个“0”时。,但记录密度低,已经不用。 有负向电流。 写电流不改变方向; 有负向电流 写电流不改变方向 写两个或两个以上“ 时 就翻不归零制: 用频率的变化表示0和 。“ 时改变方向 时改变方向, 见1就翻不归零制:流过磁头的电流只有在记录有自同步能力。 , 就翻不归零制 1时位单元变化 次。用频率的变化表示 和1。有自同步能力。 时位单元变化2次 流过磁头的电流只有在记录“1”时改变方向 时位单元变化 流在位单元边界改变方向(位间相关性编码,以减少磁通翻转次数, 流在位单元边界改变方向(位间相关性编码,以减少磁通翻转次数, 记录“ 时电流方向不变 磁头线圈中始终有电流。无自同步能力, 时电流方向不变。 记录“0”时电流方向不变。磁头线圈中始终有电流。无自同步能力, 提高记录密度)。有自同步能力。 )。有自同步能力 提高记录密度)。有自同步能力。 );写 调相制 :写“1”时,写电流在位单元中间正跳变 时 写电流在位单元中间正跳变( ); 需要增设同步磁道来提供外加同步选通信号。 需要增设同步磁道来提供外加同步选通信号。 (-I→+I);写 )。读出时 “0”时,写电流在位单元中间负跳变(+I→-I)。读出时,位单元 时 写电流在位单元中间负跳变( )。读出时, 中间的转换区将产生读出信号,该信号既是数据信号, 中间的转换区将产生读出信号,该信号既是数据信号,又是同步信 所以调相制具有自同步能力。 号,所以调相制具有自同步能力。
TMC4000 系列大屏幕处理器 说明书
TMC4000 系列大屏幕处理器使用说明书
9.不宜将本设备放置于散热片附近或其它高温地方使用; 10.请妥善整理放置电源线,以防破损; 11.下列情况,应拔掉本设备电源插头,由专业维修人员处理:
1) 插头电源线损坏或磨损时; 2) 有液体溅入本设备时; 3) 本设备跌落或机箱损坏时; 4) 本设备出现明显功能异常或性能变化时。
输入 输入格式 视频窗口数
可以支持复合视频输入或 S-Video 输入 NTSC、PAL、SECAM TMC4100 整个系统最大支持 16 个视频窗口 TMC4200 整个系统最大支持 128 个视频窗口
输入类型 最大分辨率
窗口数
VGA(HD15) TMC4100 最大支持 1280X1024@30Hz,TMC4200 最大 支持 1600X1200 TMC4100 整个系统最大支持 8 路实时 RGB TMC4200 整个系统最大支持 16 路实时 RGB
口用电缆接入各显示单元的相应输入端口;
10
TMC4000 系列大屏幕处理器使用说明书
4、 根据系统需求,将处理器网口使用网线和控制软件所在的计算机联接起来; 5、 根据系统需求,将系统内其他设备逐一安装完毕;
检查无误后打开各屏幕电源,打开各辅助设备电源,打开处理器电源开始运行
第 6 章 系统设置
6.1 服务端主界面:
2.3.6 支持远程IP窗
只要在和处理器同一个局域网的计算机上安装受控端,就能在处理器上开一个远程 IP 窗 显示来该计算机的图像,在该计算机上做的任何操作都可以显示在该窗口中。远程 IP 窗也 可以够任意漫游、拖放、叠加、调整大小。
2.3.7 支持保存效果
控制软件允许用户自定义用什么信号源开窗口,以及这些窗口的位置和布局,并且支持保 存成效果文件方便用户随时调用,而且效果的数目不受限制。
C4000中文操作手册
5
C4000 型控制器
2 软件概览
2.1 软件定义
该C4000型控制器的软件是用您自己的语言构成的逻辑结构或菜单式设计方便操作,通电系统自 动显示主菜单:
• Display 显示测量结果、数据记录信息和系统自身信息 • Product 测量产品的切换、测量产品的定义 • System 系统的设定、服务以及语言的种类 当初始上电时需要设定如下基本的系统参数: • 选择菜单语言 • 设定时间和日期 • 光源灯泡电压 •等 下步骤即对测量分析的产品进行定义,最多可以定义8种不同产品的,测量的产品可以与实际过 程介质没有关联,但更多的C4000型控制器的设定参数如下: 产品 (最多 8 种)
13
C4000 型控制器
3 基础设定
3.3 日期/时间
用▲ ▼键在主菜单中选择 SYSTEM SETUP条目, ENTER键输入,即进入更改 日期时间的子菜单
子菜单将会出现左图显示, 用▲ ▼箭头选择 DATA/TIME条目,ENTER 键输入即进入下一子菜单
选择日期格式,输入日期。 然后保存或退出。
7.1 显示模式
50
8 数据记录
8.1 数据记录显示
51
9 维护
9.1 系统调零设定
52
9.2 系统诊断
54
9.3 传感器匹配
55
9.4 mA输入校验标定
56
9.5 mA输出校验标定
57
9.6 维护
58
10 显示信息
59
11 故障信息
60
第1部分 – 硬件手册(请参照相关文件)
第3部分 – 防爆产品 (请参照相关文件)
• 语言
德语/英语(法语、西班牙语、意大利语、荷兰语和葡萄牙语即将出炉)
英飞凌 psoC4 4000 系列数据手册说明书
请注意赛普拉斯已正式并入英飞凌科技公司。
此封面页之后的文件标注有“赛普拉斯”的文件即该产品为此公司最初开发的。
请注意作为英飞凌产品组合的部分,英飞凌将继续为新的及现有客户提供该产品。
文件内容的连续性事实是英飞凌提供如下产品作为英飞凌产品组合的部分不会带来对于此文件的任何变更。
未来的变更将在恰当的时候发生,且任何变更将在历史页面记录。
订购零件编号的连续性英飞凌继续支持现有零件编号的使用。
下单时请继续使用数据表中的订购零件编号。
PSoC ® 4:PSoC 4000系列数据手册可编程片上系统(PSoC ®)概述PSoC ® 4是一个可扩展和可重配置的平台架构,是一个包含Arm ® Cortex TM -M0 CPU 的可编程嵌入式系统控制器。
通过灵活自动布线资源,它将可编程及可重新配置的模拟模块与数字模块相结合。
PSoC 4000产品系列是PSoC 4平台架构的最小成员。
该产品系列是下列三者的组合:拥有标准通信和时序外设的微控制器、具有一流性能的电容式触摸感应系统(CapSense )以及通用模拟。
针对新应用和设计要求的方面来说,PSoC 4000产品与PSoC 4平台系列产品向上兼容。
特性32位MCU 子系统■16 MHz Arm Cortex-M0 CPU ■包含读取加速器的可达16 KB 的闪存■SRAM 容量可达2 KB可编程模拟资源■用于通用目的或电容式感应应用场合的两个电流DAC (IDAC )■拥有内部参照的低功耗比较器■电容感应模块提供的有限ADC 功能低功耗操作:1.71 V 至5.5 V■通过中断和I 2C 地址检测唤醒的深度睡眠模式电容式感应■赛普拉斯的CapSense Sigma-Delta (CSD )感应技术提供了一流的信噪比(SNR )和防水性能■通过赛普拉斯提供的软件组件可以更容易地实现电容式感应设计■传感器的电容范围为5 pF 到45 pF 时,可以自动调校硬件(SmartSense™)串行通信■在深度睡眠模式下,许多主设备I 2C 模块可以进行地址匹配,并且在匹配后唤醒设备。
VMediaX VX4000系列MCU用户手册
VX4000系列MCU用户手册VMediaX VX4000系列MCU用户手册声明版权信息版权所有南京超然科技有限公司保留所有权利。
除非版权法允许,否则,事先未经书面许可,任何人不得进行复制、改编、翻译或用于其它商业目的。
声明本产品为A级产品,在生活环境中,该产品可能会造成无线电干扰。
在这种情况下,可能需要对其干扰采取切实可行的措施。
由于软硬件变化可能导致本文信息与实际情况有偏差,以实际情况为准。
南京超然科技有限公司保留该文档的最终解释权。
VMediaX VX4000系列MCU用户手册目录声明 (1)目录 (2)第1章产品简介 (4)1.1 开箱检查 (4)1.2 设备的安装 (4)1.3 使用注意事项 (4)第2章快速操作指导 (6)2.1 系统登陆 (6)2.2 页面介绍 (6)2.2.1 快捷键 (7)2.2.2 管理菜单 (7)第3章MCU模块管理 (9)3.1 管理菜单 (9)3.2 会议快速创建及控制 (10)3.2.1 终端管理 (10)3.2.2 创建会议(模板) (12)3.2.3 会议基本控制 (14)第4章会议高级功能介绍 (17)4.1 会议调度功能 (17)4.2 多分屏功能 (18)4.3 主席功能 (20)4.4 发言者功能 (21)4.5 终端主动呼叫功能 (22)4.6 双流功能 (22)4.7 会议参数设置 (24)4.8 滚动字幕功能 (25)4.9 会场名称功能 (26)4.10 会场画面轮询功能 (26)4.10.1 广播轮询功能 (27)4.10.2 主席轮询功能 (27)4.11 点名功能 (28)4.12 语音激励功能 (28)4.13 互控级联功能 (29)第5章系统配置 (32)5.1 常规设置 (32)5.1.1 设备名称 (32)5.1.2 日志等级 (32)5.2 网络设置 (32)5.2.1 RTP最大缓存的包个数 (33)5.2.2 RTP最大Payload (33)5.3 H.323设置 (33)VMediaX VX4000系列MCU用户手册5.4 其他 (34)5.5 系统 (35)5.5.1 状态 (35)5.5.2 系统 (35)5.5.3 日志下载 (36)5.6 产品信息 (36)第6章故障排除 (37)第7章安全事项 (40)第8章保修服务 (41)8.1 保修内容 (41)8.2 售后服务方式 (41)8.3 延长保修服务期限 (41)8.4 保修期以外的售后服务 (42)VMediaX VX4000系列MCU用户手册第1章产品简介1.1开箱检查1.2设备的安装首先将设备安置在网络机房相应的机柜上;将电源线接入设备电源插口,将网线连接到LAN4口,按下电源开关;在客户端的PC机增加一个IP地址:10.10.10.x(x为除10以外的1~254之间的任意一个数字),子网掩码为255.255.255.0。
XMC4000单片机系列原创技术资料——英飞凌技术社区
XMC4000单片机原创技术资料——英飞凌技术社区XMC4000系列采用了ARM内核,可以应用在许多工业应用环境,比如工业自动化、电机驱动、太阳能、汽车等行业。
尤其是针对节能工业应用,XMC4000更是有着突出的表现。
XMC4000产品家族包含5个系列:XMC4100、XMC4200、XMC4400、XMC4500 和XMC4700。
这些系列的差别主要体现在内核频率、内存容量、外设功能和I/O数量等方面。
现在XMC4000已发布一年有余,英飞凌技术社区许多网友已经积累了一定的使用经验,在此分享,希望帮助大家的设计。
一、官方资料:XMC4000系列数据手册、选型指南、应用笔记、开发例程、开发工具等资料下载:英飞凌官方FAQ解答—XMC4000系列产品和设计一百问二、社区原创笔记XMC4200 minikit使用Infineon Memtool烧写程序,图文教程拿到XMX4200 minikit已经有几天了,用Keil,Dave3,IAR都做了测试,配合Jlink可以调试。
心血来潮,想做串口的程序烧写,今天就把过程简单的分享下。
xmc4200 minikit + JlinkXMC4200的JTAG接口改2.54mm了,终于不用自己做转接线了,直接插Jlink详解英飞凌芯片仿真环境搭建DAVE3+JLINK记录一下dave3和jlink配合的使用过程。
DAVE3是专为XMC家族打造的基于Eclipse的免费软件开发平台xmc4500初级使用目前我还出处于学习使用的初级阶段,我的第一个例程也是led闪烁程序,这个论坛上有很多人分享了自己的成功经验,十分感谢,程序可以下载到,还有免费的编译环境,所以我先研究的了一下程序下载,遗憾的是程序下载并不容易,至少需要Miniwiggler,ulink,jlink其中的一种,可这些我好像都没有。
但好消息是英飞凌的最新的免费工具Memtool4.5已经支持了串口下载程序。
GC4000_系列硬件手册

51
实时时钟 (RTC) . . . . . . . . . . . . . . . . . . . . . . . . .
55
5
4.2 接线规则 . . . . . . . . . . . . . . . . . . . . . . . . . . .
57
连接电源线 . . . . . . . . . . . . . . . . . . . . . . . . . .
修订号
1 面板 2 直流电源连接器 3 螺钉安装扣件 (GC-4408W 和 GC-4401W x 4, GC-4501W x 6) 4 GC4000 安装指南
您可从面板的产品标签上找到产品版本 (PV) 和修订级别 (RL)。 下图表示的是一个典型标签:
12
部件标识和功能
GC4000 部件标识
侧面 正面
z 在卸除任何护盖或门,或安装或卸除任何附件、硬件、电缆或导线之前,先断 开所有设备的电源连接 (包括已连接设备),此设备的相应硬件指南中另有指 定的特定情况除外。
z 始终使用合适的额定电压传感器确认所有电源已关闭。 z 从设备和电源上拔下电源线的插头。 z 更换并紧固所有护盖、附件、硬件、电缆与电线,并确认接地连接正确后再对
47
章 4 安装和接线 . . . . . . . . . . . . . . . . . . . . .
49
4.1 安装 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
50
安装步骤 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
相关的文件
XMC4000中文参考手册-第01章 XMC4500简介
简介1 简介XMC4500系列属于工业微控制器XMC4000家族,该系列以ARM Cortex-M4核心处理器为基础。
优化的XMC4000系列器件用于电机控制、功率变换、工业连接和检测及控制应用。
如今高效节能的嵌入式控制应用变得更加复杂,需要微处理器具有DSP(数字信号处理)特性和FPU(浮点运算单元)能力的更高性能的CPU内核,以及对集成外设的性能进行优化的解决方案。
XMC4500微控制器系列利用了英飞凌公司在微控制器设计领域数十年的经验,同时辅以可以缩短产品生产时间,提高生产效率的环境,提出了一种优化的设计方案,足以应对如今嵌入式控制应用对性能的挑战。
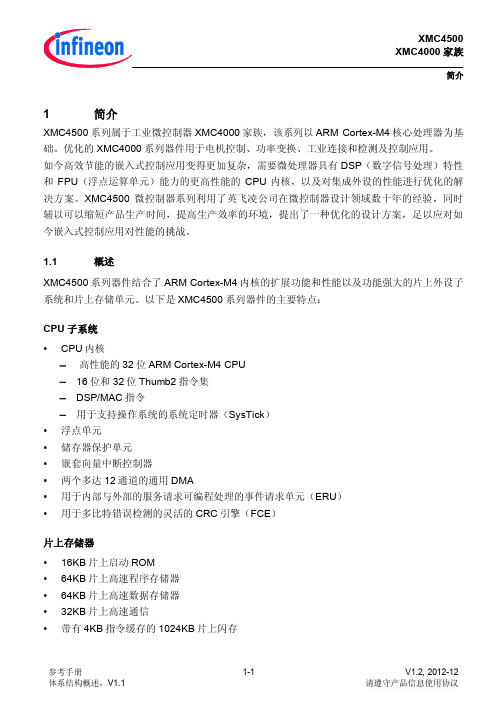
1.1 概述XMC4500系列器件结合了ARM Cortex-M4内核的扩展功能和性能以及功能强大的片上外设子系统和片上存储单元。
以下是XMC4500系列器件的主要特点:CPU子系统•CPU内核−高性能的32位ARM Cortex-M4 CPU−16位和32位Thumb2指令集−DSP/MAC指令−用于支持操作系统的系统定时器(SysTick)•浮点单元•储存器保护单元•嵌套向量中断控制器•两个多达12通道的通用DMA•用于内部与外部的服务请求可编程处理的事件请求单元(ERU)•用于多比特错误检测的灵活的CRC引擎(FCE)片上存储器•16KB片上启动ROM•64KB片上高速程序存储器•64KB片上高速数据存储器•32KB片上高速通信•带有4KB指令缓存的1024KB片上闪存简介通信外设•以太网MAC模块,能够容纳10/100 MB/s的传输速率•通用串行总线,USB2.0主机,全速OTG,带有集成PHY•控制器局域网接口(MultiCAN),具有三节,64个消息对象,数据速率最高可达1 MB/s 的 Full-CAN/Basic-CAN•6个通用串行接口通道(USIC),可用作通用异步收发传输器(UART),双线与四线串行外设接口(SPI),IIC, IIS 与 LIN接口•用于人机交互的LED灯和触摸感应控制器(LEDTS)•用于储存数据的SD和多媒体卡接口(SDMMC)•外部总线接口单元(EBU)启用与外部储存设备以及片外外设通信,如SRAM,SDRAM,NOR,NAND和突发模式闪存。
英飞凌新一代控制器XMC4000在三电平逆变器中的应用概要

英飞凌新一代控制器 XMC4000在三电平逆变器中的应用--北京晶川电子SEP. 2012三电平逆变器控制策略三电平逆变器的控制策略主要是 PWM 控制技术所谓 PWM 技术,就是利用半导体器件的开通和关断,把直流电压变成一定形状的电压脉冲序列, 以实现变频、变压并有效地控制和消除谐波的一种技术。
目前常用 PWM 控制策略有:单脉冲控制方式多载波控制方式空间电压矢量(SVPWM 控制方式三电平逆变器通常采用矢量控制技术和直接转矩控制技术三电平逆变器的中点电位平衡是影响逆变器可靠性的关键因素之一设计中需要机、电、热、磁及其相互的耦合英飞凌控制器 XMC4000家族概况XMX4000家族主要资源XMC4000内核(Cortex-M4主要特点Cortex-M4内核特点:RISC 处理器:高性能 32位 CPU 、运算能力可达1.25DMIPS/MHzThumb-2®指令集:16/32位指令的最佳混合,提供最佳代码密度低功耗模式:集成的睡眠状态、多电源域、基于架构的软件控制嵌套矢量中断控制器 (NVIC:低延迟、低抖动中断响应、不需要汇编编程、以纯 C 语言编写的中断服务例程。
能完成出色的中断处理;工具和 RTOS 支持:广泛的第三方工具支持、Cortex 微控制器软件接口标准 (CMSIS、最大限度地增加软件成果重用,缩短新产品的上市时间调试和跟踪:包括 JTAG 和 SWD 模式、支持多处理器、实时跟踪ARM Cortex™-M4高效的信号处理功能与低功耗、低成本和易于使用的优点组合,可满足电机控制、汽车、电源管理、嵌入式音频和工业自动化以及新兴市场等灵活应用。
XMC4500产品的结构框架XMC4500产品的主要特性强大的运算能力Cortex-M4:32位 CPU ,工作频率 120MHz 集成 DSP 指令集单精度浮点运算单元 (FPU灵活的事件处理嵌套矢量中断控制器 (NVIC事件请求处理单元 (ERUDMA丰富的安全机制存储器保护单元 (MPU灵活的 CRC 校验单元 (FCEWDT片上存储器高达 1024KBytes Flash、 4KB 程序缓存(ICache 64KByte PSRAM, 64KBytes DSRAM32KBytes Communication RAMXMC4500产品的主要特性通信 /人机交互单元以太网控制器 3个通用串行单元(USIC MultiCAN (3个节点 USB OTGLEDTS SDMMC 接口外部总线接口(EBU模拟信号相关外设4核 ADC 、 12位精度、 28通道 4通道 Delta-Sigma 解调器 2路 DAC 、 12位精度驱动控制相关外设2 x CCU8 (捕获比较单元8 4 x CCU4(捕获比较单元4 2 x POSIF(位置信号接口单元其他RTC Die Temperature Sensor (DTS 芯片仿真支持 8个硬件断点, CoreSight, Trace支持 JTAG, SWD, 单线 Trace封装形式:PG-LFBGA-144, PG-LQFP-144, PG-LQFP-100 工作温度范围:-40℃–85 ℃ , -40 ℃ -125 ℃工作电压 : 3.2 – 3.6VXMC4500产品的关键特性——DMA 及 USIC DMA两个专用 DMA 单元以太网, USB 两个通用 DMA 单元12路 DMA 通道每通道均配置 FIFO (8-32Byte,–支持 Burst Mode可编程通道优先级分散-收集模式(Scatter-GatherUSIC可以软件灵活的配置为 UART (LIN、 SSC 、 IIC 、 IIS USIC 在 XMC4000系列中的新特性支持 Single/Dual/QuardSPI–支持最新的 Serial NAND Flash Serial NAND Flash»e.g. Spansion: S25FL032P支持最多8个片选信号生成–多个从设备访问–硬件自动根据配置选择片选信号XMC4500产品的关键特性——驱动控制外设驱动控制主要相关外设:多功能定时器CCU4 – Capture Compare Unit 4 CCU8 – Capture Compare Unit 8 POSIF –位置接口单元定时器:1个系统时钟(Cortex M4内核24位定时器,向下计数,自动重载CCU4每个 CCU4模块包含 4路 16位多功能定时器CCU8每个 CCU8模块包含 4路 16位多功能定时器XMC4000 定时器个数=1 + (CCU4模块数 X 4 + (CCU8模块数 X 4XMC4500产品的关键特性——CCU4XMC4500产品的关键特性——CCU8XMC4500产品的关键特性——CCU8XMC4500产品的关键特性——POSIF 特性包含两个模块每个模块支持增量编码器霍尔传感器多通道模式与 CCU4、 CCU8配合进行位置、速度的检测与CCU8配合进行直流无刷电机控制示例——增量编码器信号处理XMC4500产品的关键特性——模拟部分 DSDDelta-Sigma ADC转换精度高(过采样动态范围大ΔΣ 解调器 (DSD –特性4个 DSD 通道梳状滤波器及积分单元辅助梳状滤波器及比较器用于快速边界检测支持旋变激励信号生成及反馈信号处理载波信号生成单元载波消除信号延迟补偿以及同步积分中断信号产生及 DMA 支持 .ΔΣ 解调器 (DSD –应用隔离电流测量直接通过电阻测量相电流宽动态输入范围,在各种负载均能得到较高的转换精度过流保护及滤波功能多相电流同步采样可与 PWM 同步,且积分窗口可控,避开噪声旋变信号接口低成本激励信号生成反馈信号解调,自动载波解调及积分功能XMC4500产品的关键特性——模拟部分 ADCADC 电气参数内核个数4转换分辨率 12位精度 TUE +/-4LSB参考电压范围 1,0 – 3,65V 采样时间 min. 67ns 转换时间 min. 483ns @ 12Bit 双通道 DAC 单元:波形生成器功能:支持正弦、三角、自定义信号生成噪声信号生成 (12位伪随机数斜坡信号生成 (12位灵活的触发源DAC 定时器或外部信号( 8路支持连续数据传输(FIFO 、 DMAADC 主要特性:XMC4500在三电平逆变器中的应用——光伏逆变器三电平光伏逆变器结构框图XMC4500在三电平逆变器中的应用——光伏逆变器光伏逆变器应用资源需求 XMC4500资源特性光伏逆变器(三电平通过捕获比较单元 CCU8产生脉冲通过电流隔离△ -∑ 调制器测量相电流和热电压△ -∑ 调制器(DSD交错的 Buck/Boost整流功率因数校正(PFC 通过捕获比较单元 CCU4产生脉冲线同步通过捕获比较单元 CCU4做时间测量通过互联网做远程控制和数据采集以太网控制器(MAC 显示端口快速 SPI 接口(速度高达 20M 通过热插拔接口作数据访问服务 USB2.0 OTG接口电池供电的实时时钟 RTC 单元三电平光伏逆变器资源需求三电平光伏逆变器对 MCU 资源需求专用 PWM 单元 CCU80可最多硬件同步输出 16路 PWM信号,满足三电平逆变器需要 12路驱动 PWM 信号的特殊要求。
XMC4000中文参考手册-第13章 SD MMC 接口(SDMMC)

参考手册 SDMMC,V1.5
13-5
V1.2, 2012-12 请遵守产品信息使用协议
Device Guide XMC4500 XMC4000 家族
SD/MMC 接口(SDMMC)
13.3
卡检测
当 检测 到 卡在 窄 槽内 插 入或移 出 时 , 状 态 会通过中 断方法 发送 给 CPU 。 低电平 卡 信 号 SDCD_n 在卡检测期间设置为 0。SDMMC_PRESENT_STATE.CARD_INSERTED 位表明卡 是 否 已 经 插 入 。 从 0 变 到 1 生 成 了 在 正 常 中 断 状 态 寄 存 器 SDMMC_INT_STATUS_NORM.CARD_INS=1 中的卡插入中断,并且从 1 变到 0 生成了在正 常中断状态寄存器 SDMMC_INT_STATUS_NORM.CARD_REMOVAL=1 中的卡移出中断。
Device Guide XMC4500 XMC4000 家族
SD/MMC 接口(SDMMC)
13
SD/MMC 接口(SDMMC)
本章描述了 SD/MMC 模块。XMC4500 使用以下 SD 和 MMC 卡标准规范。获取有关如何操作 SDMMC 界面的更多详细信息,请参考下面的 SD 和 MMC 参考规范。 参考 [10] SD 规格部分 A2,SD 主控制器标准规范,版本 2.00,2007 年 2 月 https:///developers/overview/host_controller/simple_spec [11] SD 规格部分 1,物理层规范,版本 2.00,2006 年 5 月 https:///downloads/pls [12] SD 规格部分 E1,SDIO 规范,版本 2.00,2007 年 1 月 https:///developers/overview/sdio/sdio_spec [13] SD 存储卡安全规范,版本 1.01 [14] 多媒体卡系统规范,版本 3.31,4.2 和 4.4 13.1 概述
XMC4000中文参考手册-第03章 总线系统

系统总线
3
总线系统
XMC4500 的目标是用于嵌入式系统。因此关键特点是时序确定性以及实时事件的低延迟。对 于通讯外设尤其需要总线带宽。 因此总线系统将提供:
时序确定 低延迟 性能 处理量 总线接口
3.1
本节介绍 2 种接口的特点。
存储接口 外设接口
XMC4500 XMC4000 家族
系统总线
专用仲裁方案提供了最优访问冲突解答,从而提高系统稳定性和实时行为。
图 3-1
多层总线矩阵
仲裁优先级 若发生同时对同一从部件的访问请求,总线控制权授予具有最高优先级的主部件。
参考手册 系统总线2012-12 请遵守产品信息使用协议
1) 较小的数字意味着较高的优先级
DSRAM 优先级依据数据存储来支持应用程序:
DSRAM1:通用数据存储 DSRAM2:以太网和 USB 数据存储
参考手册 系统总线,V1.1
3-3
V1.2, 2012-12 请遵守产品信息使用协议
总线系统的中心部分是围绕多层 AHB-lite 相容矩阵构建。通过这种技术手段主总线和从总线能 够以一种灵活的方式相连,同时保持较高的总线性能。 图 3-1 中描述的总线矩阵实现了一个优化拓扑使零等待状态数据访问主和从连接的总线矩阵。
参考手册 系统总线,V1.1
3-1
V1.2, 2012-12 请遵守产品信息使用协议
XMC4500 XMC4000 家族
系统总线
表 3-1
每个从部件 1)的访问优先级 GPDMA0 2 2 2 4 2 2 2 2 GPDMA1 3 3 3 5 3 3 3 3 ETH - - 4 2 - - - - USB - - 5 3 - - - -
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
地址空间 外部专用总线
生产商指定 1 生产商指定 2 7.4
E0100000 F0000000
服务请求生成
存储模块和其他系统组件能够产生表明对 CPU 总线错误异常或中断的错误响应。 错误原因的类型 未支持的存取模式 访问无效的地址 奇偶校验误差(仅存储器) 缓冲写入访问外设
不能用总线错误表明的错误表示作为中断传播到 CPU 的服务请求。通常,缺乏总线错误反应 能力,适用于缺乏从系统总线直接访问存储模块,这适用于服务内部 FIFOs 和本地存储缓冲器 目的存储器。 不支持的访问模式 不支持的访问模式可以用很多种方式分类,并且经常指定给执行访问的模块。典型的不支持的 访问模式的例子是读取访问至只写或写入访问至只读地址映射资源,不支持的存取数据宽度, 保护存储区域。欲了解模块特定限制,请参考单独模块章。
图 7-1
Cortex-M4 处理器地址空间
参考手册 存储器组织,V2.1
7-2
V1.2, 2012-12 请遵守产品信息使用协议
XMC4500 XMC4000 家族
存储器组织
7.2
存储器区域
XMC4500 装置特定地址映射呈现了内部和外部存储及外设的存在。XMC4500 存储区在表 7-1 中都有描述。 表 7-1 开始 00000000 存储区 结束 1FFFFFFF 大小(十六进制) 20000000 空间名称 代码 用法 引导只读存储器(ROM) 闪存 程序存储器(SRAM) 20000000 40000000 48000000 50000000 58000000 60000000 A0000000 E0000000 E0100000 F0000000 3FFFFFFF 47FFFFFF 4FFFFFFF 57FFFFFF 5FFFFFFF 9FFFFFFF DFFFFFFF E00FFFFF EFFFFFFF FFFFFFFF 20000000 08000000 08000000 08000000 08000000 40000000 40000000 00100000 0FF00000 10000000 SRAM 外设 0 外设 1 外设 2 外设 3 外部 SRAM 外部设备 专用 外部总线 厂商指定 1 厂商指定 2 保留 保留 快速内部 SRAM 内部 外设 组 0 内部 外设 组 1 内部 外设 组 2 内部 外设 组 3 外部存储 外部设备 CPU
ROM PPB ETM TPIU
0xFFFFFFFF
0xE0100000 0xE0040000 0xE0000000
SCS FPB DWT ITM 1.0GB
0xA0000000
RAM
1.0GB
0x60000000 0.5GB 0x40000000 SRAM 0.5GB 0x20000000 0.5GB 0x00000000
参考手册 存储器组织,V2.1
7-6
V1.2, 2012-12 请遵守产品信息使用协议
XMC4500 XMC4000 家族
存储器组织
表 7-2
存储器映射(续表) 开始地址(十六进制) E0000000 E0001000 E0002000 E0003000 E000E000 E000E010 E000EF34 E000F000 E0040000 E0041000 E0042000 E00FF000 结束地址(十六进制) E0000FFF E0001FFF E0002FFF E000DFFF E000EFFF E000E01C E000EF47 E003FFFF E0040FFF E0041FFF E00FEFFF E00FFFFF EFFFFFFF FFFFFFFF 模块 ITM DWT FPB 保留 SCS 系统标志 FPU 保留 TPIU ETM 保留 ROM 表 保留 保留
地址空间
SRAM
20000000 20010000 30000000 30008000
参考手册 存储器组织,V2.1
7-4
V1.2, 2012-12 请遵守产品信息使用协议
XMC4500 XMC4000 家族
器映射(续表) 开始地址(十六进制) 40000000 40004000 40008000 4000C000 40010000 40014000 40018000 4001C000 40020000 40024000 40028000 4002C000 40030000 40034000 40038000 4003C000 40044000 40048000 结束地址(十六进制) 40003FFF 40007FFF 4000BFFF 4000FFFF 40013FFF 40017FFF 4001BFFF 4001FFFF 40023FFF 40027FFF 4002BFFF 4002FFFF 40033FFF 40037FFF 4003BFFF 4003FFFF 40047FFF 47FFFFFF 48003FFF 48007FFF 4800BFFF 4800FFFF 48013FFF 48017FFF 4801BFFF 4801FFFF 48023FFF 48027FFF 4802BFFF 4FFFFFFF 模块 PBA0 VADC DSD CCU40 CCU41 CCU42 保留 保留 CCU80 CCU81 POSIF0 POSIF1 USIC0 保留 保留 保留 ERU1 保留 PBA1 CCU43 保留 保留 LEDTS0 CAN DAC SDMMC USIC1 USIC2 端口 保留
存储器组织
表 7-2 代码
存储器映射 开始地址(十六进制) 00000000 00004000 08000000 08100000 09E20000 09E24000 0C000000 0C100000 0DE20000 0DE24000 10000000 10010000 结束地址(十六进制) 00003FFF 07FFFFFF 080FFFFF 09E1FFFF 09E23FFF 0BFFFFFF 0C0FFFFF 0FFFFFFF 0DE23FFF 0FFFFFFF 1000FFFF 1FFFFFFF 2000FFFF 2FFFFFFF 30007FFF 3FFFFFFF 模块 BROM (PMU ROM) 保留 PMU/FLASH (缓存) 保留 保留 保留 PMU/FLASH (未缓存) 保留 保留 保留 PSRAM (代码) 保留 DSRAM1 (系统) 保留 DSRAM2 (通信) 保留
XMC4500 XMC4000 家族
存储器组织
表 7-2 外设 2
存储器映射(续表) 开始地址(十六进制) 50000000 50004000 50008000 5000C000 50010000 50014000 50018000 5001C000 50020000 50024000 50040000 50080000 结束地址(十六进制) 50003FFF 50007FFF 5000BFFF 5000FFFF 50013FFF 50017FFF 5001BFFF 5001FFFF 50023FFF 5003FFFF 5007FFFF 57FFFFFF 58003FFF 58007FFF 5800BFFF 5800FFFF 58013FFF 58017FFF 5FFFFFFF 63FFFFFF 67FFFFFF 6BFFFFFF 6FFFFFFF 9FFFFFFF A3FFFFFF A7FFFFFF ABFFFFFF AFFFFFFF DFFFFFFF 模块 PBA2 SCU & RTC WDT ETH 保留 DMA0 DMA1 保留 FCE 保留 USB 保留 PMU0 寄存器 PMU0 预取 EBU 寄存器 保留 保留 保留 保留 EBU 存储 CS0 EBU 存储 CS1 EBU 存储 CS2 EBU 存储 CS3 保留 EBU 设备 CS0 EBU 设备 CS1 EBU 设备 CS2 EBU 设备 CS3 保留
XMC4500 XMC4000 家族
存储器组织
7
存储器组织
本章提供了系统存储器结构的描述和有关于奇偶性测试和奇偶校验错误处理的基本信息。 参考: [8] CortexTM-M4 用户指南,ARM DUI 0508B(ID062910)。 7.1 概述
存储器映射的目的是在不同等级的系统总线基础架构下平衡解码成本。 7.1.1 功能
存储器映射能实现以下性能: 与标准 ARM Cortex-M4 CPU 的兼容[8] 在整个 XMC4000 家族中的兼容 最优化的功能模块地址空间分组 Cortex-M4 地址空间
7.1.2
系统的存储器映射定义为几个区域。每一个区域的地址边界由 Cortex-M4 核心架构决定。
参考手册 存储器组织,V2.1
7.3
存储器映射
表 7-2 定义了 XMC4500 的详细的系统存储映射,在映射中每个外设或存储实例执行它自己的 地址空间。获取系统组件和外设的寄存器详细描述,请参考此文档的相关章。
参考手册 存储器组织,V2.1
7-3
V1.2, 2012-12 请遵守产品信息使用协议
XMC4500 XMC4000 家族
地址空间
外设 3
58000000 58004000 58008000 5800C000 58010000 58014000 58018000
外部 SRAM
60000000 64000000 68000000 6C000000 70000000
外部设备
A0000000 A4000000 A8000000 AC000000 B0000000
7-1
V1.2, 2012-12 请遵守产品信息使用协议
XMC4500 XMC4000 家族
存储器组织
0xE0100000 0xE00FF000 0xE0042000 0xE0041000 0xE0040000 0xE0040000 0xE000F000 0xE000E000 0xE0003000 0xE0002000 0xE0001000 0xE0000000