汽车线控转向实验台转向驱动系统的辨识及其PID控制
线控转向系统的PI^λD^μ控制器研究
Abs t r a c t :F o l l o wi ng t h e c h a r a c t e r i s t i c s o f t h e s t e e in r g — b y- wi r e s y s t e m, t he d y na mi c s e q u a t i o n s o f t h e ro f nt wh e e l s t e e in r g mo de l we r e e s t a b l i s he d .A n e w PI n D ̄ c o n t r ol me t h o d b a s e d o n ra f c t i o n a l c a l c u l u s wa s
汽车线控技术系列9----主动转向和四轮转向控制

2-主动转向和四轮转向控制
下图为PID控制时的横摆角速度变化,PID控制使车辆实际 横摆角速度跟踪目标整车模型所输出的目标横摆角速度, 横摆角速度收敛,汽车稳定。2-主动转向和四轮转向控制
下图为PID控制时的质心侧偏角变化。PID控制使质心侧偏 角变化较小,最后收敛到0。
2-主动转向和四轮转向控制
2-主动转向和四轮转向控制
基于PID控制的前轮主动转向控制
图为基于PID控制的前轮主动转向控制算法框图。转向盘模块输出的转 向盘转角经过转向传动比算法得到目标前轮转角值,经过非线性三自由度整车模型 计算得到目标横摆角速度。进行经典的PID控制算法,由目标横摆角速度与干扰引 起的整车实际横摆角速度的偏差得到转向电机的电流,转向电机力矩驱动前轮转向模块得到 实际前轮转角,经过三自由度整车操纵稳定性模型得到实际横摆角速度,反 馈到转向电机PID控制模块处,枃成转向电机电流的闭环控制,实现对于目标横摆 角速度的跟踪控制,保障侧向干扰下的整车操纵稳定性。
2-主动转向和四轮转向控制
基于模糊PID控制的前轮主动转向控制
基于模糊PD控制的前轮主动转向控制算法与上图类似,而将转向电机P 控制模块改为转向电机模糊PID控制模块。下图所示为模糊PID算法。模控 制有两个输入量,即目标横摆角速度与实际横摆角速度的偏差及偏差的变 化率。三个输出量为比例系数kp、积分系数ki、微分系数kd。输入与输出均 采用三角型隶属度函数。模糊控制整定的PID控制参数用于经典PID,得到 转向电机电流,驱动前轮转向模块。
下图为PID控制时的整车侧倾角变化,整车侧倾较小。
2-主动转向和四轮转向控制
下图为PID控制时的车辆轨迹,车辆基本保持以期望的行驶轨迹行驶。以车 辆实际横摆角速度与目标横摆角速度的偏差的均方根值、车辆实际侧向位移 与目标侧向位移的偏差的均方根值作为车辆侧向稳定性的评价指标。側向风 力100N、500N时,车辆横摆角速度偏差的均方根值分别为0.02"/s0.12°/s, 车辆侧向位移偏差的均方根值分别为0.05m、0.25m。PID控制参数的整定是 实现控制目标的关键。以上表明,当干扰变化时,采用固定的PID控制参数 不能保证仍然具有较好的抵制侧向干扰而保持侧向稳定性的能力。经典PID 控制应与模糊控制结合,PID控制参数由模糊控制实时整定。
多轴车辆第三轴电控液压转向系统及其PID控制
多轴车辆第三轴电控液压转向系统及其P I D 控制钱立军 胡伟龙 邱利宏 刘少君合肥工业大学,合肥,230009摘要:为了改善多轴车辆后轴轮胎的磨损,设计了一种第三轴电控液压转向系统㊂重点研究了该系统的液压执行机构和对中自锁油缸的工作原理,拟合出了符合阿克曼转角定理的第三轴预期转角,建立了电控液压转向系统的模型,设计了分数阶P I D 控制器并提出了该分数阶P I D 控制器参数的选取方法,最后进行了仿真分析㊁台架试验㊁实车试验㊂拟合结果表明,第三轴预期转角在车速为10m /s 和20m /s 时,期望值和实际值的残差平方都在0.16以内,拟合度都在0.985以上㊂仿真分析结果表明,分数阶P I D 控制系统比整数P I D 控制系统具有更小的超调量和更短的调节时间㊂台架试验结果表明,第三轴预期转角在车速为10m /s 和20m /s 时,期望值和实际值的误差都在±0.3°以内㊂由实车试验可以定性看出,安装该第三轴电控液压转向系统比不安装该系统在空载和满载时轮胎磨损情况都有所改善㊂关键词:多轴车辆;转向系统;液压执行机构;期望转角;分数阶P I D 控制器中图分类号:U 463.4 D O I :10.3969/j.i s s n .1004‐132X.2015.22.005E l e c t r o n i cH y d r a u l i c S t e e r i n g S ys t e ma n d I t s P I DC o n t r o l l e r A p p l i e d t oT h i r dA x l e o fM u l t i ‐a x l eV e h i c l e s Q i a nL i j u n H u W e i l o n g Q i uL i h o n g L i uS h a o ju n H e f e iU n i v e r s i t y o fT e c h n o l o g y ,H e f e i ,230009A b s t r a c t :T h e e l e c t r o n i c h y d r a u l i c s t e e r i n g s y s t e m o f a t h i r da x i s a i m e da t r e d u c i n g th ew e a ro f t h e r e a r t i r e so f t h e m u l t i ‐a x i sv e h i c l e s .T h ea c t u a t o ro fe l e c t r i ch y d r a u l i cs t e e r i n g s y s t e m a n dt h e w o r k i n gp r i n c i p l e s o f t h e c e n t e r i n g a n d s e l f ‐l o c k i n g c y l i n d e r o f h y d r a u l i c s y s t e m w e r e f o c u s e d .A n e x -p e c t e d a n g l e o f t h e t h i r d a x l ew a s f i t t e db a s e d o n t h eA c k e r m a n a n g l e t h e o r e m.A m o d e l o f e l e c t r o n i c h y d r a u l i c s t e e r i n g s y s t e m w a s b u i l t .Af r a c t i o n a l o r d e rP I Dc o n t r o l l e r a n d t h e a l go r i t h mo f f r a c t i o n a l o r d e rP I Dc o n t r o l l e r p a r a m e t e r sw e r e p u t f o r w a r d .A t l a s t t h e s i m u l a t i o n a n a l ys e s ,a b e n c h t e s t a n d a v e h i c l e t e s tw e r ec o n d u c t e d .T h e f i t t i n g r e s u l t s s h o wt h a t t h e r e s i d u a l s q u a r eb e t w e e nt h ee x p e c t e d v a l u e s a n d t h e r e a l v a l u e s o f t h e a n g l e s o f t h e t h i r d a x l e a r ew i t h i n 0.16a n d t h e f i t t i n g d e gr e e i s a b o v e 0.985w h e n t h e s p e e d o f v e h i c l e i s a s 10m /s o r 20m /s .A n d t h e s i m u l a t i o n r e s u l t s s h o wt h a t t h e s y s -t e mc o n t r o l l e db y f r a c t i o n a l o r d e rP I Dc o n t r o l l e r h a s s m a l l e r o v e r t i m e a n d s h o r t e r a d j u s t i n g t i m e t h a n t h e o n e o f i n t e g r a l o r d e rP I Dc o n t r o l l e r .T h eb e n c ht e s t r e s u l t s s h o wt h ee r r o r sb e t w e e nt h ee x pe c t v a l u e s a n d t h e r e a l v a l u e s of t h e t h i r d a x l e a r ew i t h i n (±0.3°)w h e n t h e s pe e dof v e h i c l e i s a s 10m /s o r 20m /s .V e h i c l e e x pe r i m e n t a l r e s u l t s s h o wt h a t t i r ew e a r a r e r e d u c e dn om a t t e r i n t h e c a s eof n o ‐l o a d e do r f u l l ‐l o a d e da f t e r t h ef r a c t i o n a lo r d e rP I Dc o n t r o l e l e c t r i ch y d r a u l i cs t e e r i ng s y s t e mi s i n -s t a l l e d .K e y w o r d s :m u l t i ‐a x l ev e h i c l e ;s t e e r i n g s y s t e m ;h y d r a u l i c a c t u a t o r ;e x p e c t e da n g l e ;f r a c t i o n a l o r -d e rP I Dc o n t r o l l e r 收稿日期:20150112基金项目:工业信息化部电子信息产业发展基金资助项目(财[2009]453号);中航工业产学研合作创新工程专项资助项目(C X Y 2010H F G D 26)0 引言传统多轴车辆第三轴转向一般使用杆系结构等机械式助力转向系统跟随第一轴转向,这一方法不满足A c k e r m a n 几何关系,导致后轴轮胎易磨损[1]㊂这就需要在第三轴使用电控液压转向系统控制第三轴的转角㊂国内外的研究多集中在理论研究阶段㊂文献[2‐3]建立了多轴车辆转向系统的A D AM S 模型;文献[4‐5]基于零质心侧偏角分析并得出了不同轴间的转向关系;文献[6‐7]对电液系统建模后,提出了基于模糊自适应的P I D 控制策略,并利用MA T L A B 进行了仿真分析㊂本文设计了一种电控液压转向系统,使得控制器可以根据第一轴的转角控制车辆第三轴的转㊃8003㊃中国机械工程第26卷第22期2015年11月下半月Copyright ©博看网. All Rights Reserved.动,并设计了对中自锁的液压油缸,使得载重汽车在长时间直线行驶的工况下第三轴不发生偏转㊂本文还对第三轴预期转角进行分段模拟,并建立了电控液压转向系统模型,设计了分数阶P I D控制器,提出一种该分数阶P I D控制器参数的选取方法并进行了仿真分析和试验验证㊂1 电控液压转向系统设计本文研究的电控液压转向系统应用于某型号的8×2载重车辆的第三轴转向控制㊂车辆第一和第二轴转向通过机械液压助力转向系统实现,第四轴是不转向的驱动轴㊂电控液压转向系统由电液比例阀㊁辅助装置㊁控制器㊁角度传感器和速度传感器组成㊂角度传感器安装在第一轴和第三轴的转向主销顶端,液压油缸安装在第三转向轴的转向横拉杆上㊂通过角度传感器测得第一轴和第三轴的当前转角,通过控制器得出第三轴期望转角,控制电液比例阀推动对中自锁液压油缸,使第三轴转动㊂1.1 液压执行机构设计液压执行机构的原理如图1所示㊂控制器控制各阀流量和开关㊂转向系统中,对中自锁油缸的左端和车桥固连,右端通过A1面的连杆和第三转向轴的转向横拉杆固连㊂整个缸筒浮动安装㊂当对中自锁油缸左边的活塞移动到液压左缸的右端面(A2面)且右边的活塞移动到液压右缸的右端面(A1面)时,第三轴轮胎直线行驶㊂图1 液压执行机构原理图正常状态下,阀3打开,阀1㊁阀2关闭,控制器根据比例换向阀4和比例换向阀5控制对中自锁油缸的运动,实现第三轴转向功能㊂系统检测到故障时,将阀1㊁阀2打开,将阀3关闭,阀4㊁阀5回到中位㊂阀1使对中自锁油缸的左缸移动到A2面,阀2使对中自锁油缸的右缸移动到A1面㊂这时,第三轴转角不随第一轴转角变化而发生变化㊂1.2 对中自锁油缸载重汽车直线行驶的工况比较多,这种工况下第三轴车轮一般处于不偏转状态,即对中自锁油缸对中工况运作时间较长㊂转向系统中采用的对中油缸通常通过高压油液实现对中锁死,缺点是锁死不牢靠,受地面冲击时稳定性差㊂为了克服该缺点,设计了一种能够在中位实现可靠机械自锁的对中自锁液压油缸,其结构见图2㊂自锁卡板与拉伸弹簧相连,通过控制拉伸弹簧就可以控制液压油缸处于自锁或解锁状态㊂在油缸自锁过程中,油液驱动活塞运动,活塞端的环形凸起将自锁卡板推出,使得自锁卡板嵌入到环槽内实现机械自锁㊂在油缸解锁过程中,油液反方向流入,油液推动活塞向解锁一侧运动,在拉伸弹簧拉力的作用下,自锁卡板回位到安装基体之中,从而实现解锁㊂正常情况下自锁卡板嵌入安装基体内,不伸出来,因而液压油缸不会被锁住㊂弹簧卡板总成的结构见图3㊂图2 对中自锁油缸的装配图图3 弹簧卡板总成的结构图2 第三轴预期转角在不考虑转向系统刚度且车轮保持纯滚动的情况下,根据阿克曼原理,同一轴上的外转向轮转角与内转向轮转角之间的关系如下:c o tαi=c o tβi+B l i(1)式中,αi为第i轴外转向轮的转角;βi为第i轴内转向轮的转角;B为轮距;l i为第i轴车轮中心到瞬时转动中心的距离㊂㊃9003㊃多轴车辆第三轴电控液压转向系统及其P I D控制 钱立军 胡伟龙 邱利宏等Copyright©博看网. All Rights Reserved.根据阿克曼原理,不同轴外转向轮转角之间还应满足关系:αi α1≈t a n αi t a n α1=1i l 1=L i -Δl 1(2)式中,L i 为第i 轴车轮中心到车辆质心的距离;Δ为车轮瞬时转动中心到质心的距离㊂根据文献[8]中零质心侧偏角控制策略,有Δ=m v 2∑ni =1C iL 2i ∑n i =1C i ∑ni =1C i L 2i-(∑ni =1C i L i )2+mv 2∑ni =1C i L i(3)式中,m 为车辆质量;v 为车辆行驶速度;C i 为第i 轴综合侧偏刚度㊂车辆的部分参数如表1所示㊂表1 车辆部分参数m (k g)L 1(m )L 2(m )L 3(m )L 4(m )540002.200.600.521.88C 1(k N /r a d )C 2(k N /r a d )C 3(k N /r a d )C 4(k N /r a d )440440474474根据阿克曼转角公式,在不同速度下,对应每一个第一轴车轮的转角,可求出相应的第三轴车轮目标转角,并且进行分段直线拟合,结果如下:当车速为10m /s 时,设第三轴预期转角为y ,第一轴转角为x ,有y =0.3004x +2.0904° x <-21°0.1880x -21°≤x ≤18°0.2972x -1.8914°x >{18°(4)当车速为20m /s 时,设第三轴预期转角为y ,第一轴预期转角为x ,有y =0.3516x +2.0770° x <-21°0.2455x -21°≤x ≤18°0.35667x -2.0230°x >{18°(5)第一转向轴的转动范围为[-45°,45°],在该范围,车辆速度v 分别为10m /s 和20m /s 时,测量相应的第一轴车轮实际角度和第三轴车轮实际角度,再计算出相应的第三轴车轮期望角度,结果如图4所示㊂图4 第三轴的实际转角和期望转角计算期望值与实际值残差平方和拟合度,结果如下:v =10m /s 时,残差平方为0.1536,拟合度为0.9886;v =20m /s 时,残差平方为0.1598,拟合度为0.9859㊂这说明拟合的三段直线比较符合实际情况㊂3 电控液压转向系统模型电控液压转向系统模型主要包括转向系统的模型和电液比例阀的模型两部分㊂电液比例阀采用带位移反馈式的比例阀,根据其运动学特性可得出传递函数为[9]x (s )I (s )=k 1k 2s 2ω2n +2ξn s ω2n+1(6)式中,x (s )为阀芯位移;I (s )为比例阀电流;K 1为比例放大器增益;K 2为比例阀放大系数;ωn 为控制阀的固有频率;ξn 为液压相对阻尼系数㊂阀芯位移x (s)就是第三轴横向拉杆的位移x v (s )㊂根据转向系统模型,第三轴横向拉杆的位移x v (s )与第三轴转角θ(s )之间的传递函数为θ(s )x v (s )=A ρs 2ω2h+2ξh s ω2h +1(7)式中,A 为活塞面积;ρ为系统系数;ωh 为液压无阻力固有频率;ξh 为液压阻尼比㊂由式(6)和式(7)可以得到第三轴转角θ(s)与比例阀电流I (s)之间的传递函数:G c (s )=θ(s )x v (s )x (s )I (s )=k 1k 2A ρ(s 2ω2n +2ξn s ω2n +1)(s 2ω2h +2ξh s ω2h+1)(8)一般情况下ωn 远大于ωh ,因此第三轴转角θ(s )与比例阀电流I (s )之间的传递函数G c (s)可做如下近似:G c (s)≈k 1k 2A ρs 2ω2n +2ξn s ω2n+1(9)代入车辆相关参数可以得到G c (s)≈15600s 2+73s +6089(10)4 第三轴电液助力转向系统分数阶P I D控制器及其参数的求解分数阶微积分的介绍和分数阶微积分的求解方法在文献[10‐14]有详细论述,这里分数阶微积分的定义采用C a pu t o 定义,求解分数阶微积分,借助于M A T L A B ,根据分数阶定义,使用截断M a -c L a u r i n 表达式展开,S 表达式选用S i m p s o n 公式法,编制分数阶微积分求解模块,在M A T L A B 中构造一种求解分数阶M a c L a u r i n 展开式的函数f r a c t i o n C ,并在S i m u l i n k 中构造分数阶模块㊂㊃0103㊃中国机械工程第26卷第22期2015年11月下半月Copyright ©博看网. All Rights Reserved.4.1 分数阶P I D 的求解方法相对于整数P I D 控制器,分数阶P I D 控制器包含积分阶数λ和微分阶数μ,控制更加精确㊁灵活㊂分数阶P I D 控制器的微分方程形式如下:u (t )=k P e (t )+k I D -λI e (t )+k D D μte (t )(11)其中,D -λI 表示λ阶积分,D μt 表示μ阶微分㊂通过对式(11)进行拉氏变换,得到分数阶P I D 的传递函数[15‐17]:G f o c (s )=k P +k I s -λ+k Ds μ(12)对于闭环系统,存在特征方程:1+G c (s )G f o c (s )=0(13)寻找一个系统的幅值裕量A m 和相位裕量φm ,满足下式A m =1|G f o c (jωp )G c (j ωp )|φm =ar g (G f o c (j ωg )G c (j ωg ))+}π(14)其中,ωp ㊁ωg 满足下式|G f o c (j ωg )G c (j ωg )|=1a r g (G f o c (j ωp )G c (j ωp ))=}π(15)4.2 使用MA T L A B 求解分数阶P I D 的参数目标幅值裕量A m 取1.5,目标相位裕量取π/2,将式(10)代入式(13)~式(15)中有k P +k I ωp λc o s πλ2+k D ωμpc o s πμ2= 23(115600ω2p -608915600)-k I ωλps i n πλ2+k D ωμp s i n πμ2=-237315600ωp k P +k Iωλgc o s πλ2+k D ωμg c o s πλ2=7315600ωg -k I ωλgs i n πλ2+k D ωμg s i n πμ2=115600ω2g -6089üþýïïïïïïïïïïïï15600(16)式(16)中有k P ㊁k I ㊁k D ㊁λ㊁μ㊁ωp ㊁ωg 7个参数㊁4个等式,我们将λ㊁μ均从0.1开始按0.1递增取值,一直到5.0㊂优化目标为时间乘以误差绝对值积分(I T A E )J I T A E :f (x )=J I T A E =∫∞0|v (t )-y (t )|dt (17)当J I T A E 最小时,认为系统性能达到最优㊂在MA T L A B 中使用f m i n c o n 函数求解P I D参数,f m i n c o n 函数的数学模型为m i n xf (x )s .t .c (x )≤0A x ≤b l b ≤x ≤u b c e q (x )=0A e q x =b e üþýïïïïïïïïq(18)令k P ㊁k I ㊁k D ㊁λ㊁μ㊁ωp ㊁ωg 分别对应x 1㊁x 2㊁x 3㊁x 4㊁x 5㊁x 6㊁x 7,令初始条件为-10㊁-10㊁-10㊁0.1㊁0.1㊁0㊁0,不等式约束中下限l b 分别为-10㊁-10㊁-10㊁0.1㊁0.1㊁0㊁0,上限u b 分别为10㊁10㊁10㊁5㊁5㊁90㊁90,等式约束c e q (x )为式(16)中的4个等式,在MA T L A B 中求出最优的k P ㊁k I ㊁k D ㊁λ㊁μ分别为18㊁0.15㊁10.5㊁1.8㊁1.5,得到J I T A E =2.47,分数阶P I D 控制器为G f r c ‐pi d =18+0.15s -1.8+10.5s 1.5(19)5 试验验证5.1 仿真分析确定λ和μ的取范围值后,I T A E 性能指标曲线如图5所示,发现当μ从0增大到1.5时,I T A E下降,当μ从1.5开始增大时I T A E 上升,故μ为1.5时I T A E 最优㊂图5 μ对阶跃响应下的I T A E 影响当取μ=1.5,输入为单位阶跃信号,λ由0到5递增变化时,I T A E 性能指标如图6所示,可见λ=1.8时I T A E 性能指标值达到最小㊂综上所述,由仿真结果可知,本文所提算法中当λ=1.5,μ=1.8时控制效果最理想,与f m i n c o n 函数求解的分数阶P I D 参数结果一致㊂图6 λ对阶跃响应下的I T A E 影响如果采用整数阶P I D ,则解得整数阶P I D 控制器为G i n t ‐pi d =4.0+0.0015s -1+3s (20)比较使用分数阶P I D 控制器㊁整数阶P I D 控制器和不使用控制器三种情况下系统的单位阶跃㊃1103㊃多轴车辆第三轴电控液压转向系统及其P I D 控制钱立军 胡伟龙 邱利宏等Copyright ©博看网. All Rights Reserved.响应,结果如图7所示㊂从图7可以看出,分数阶P I D 比整数阶P I D 具有更小的超调量和调节时间㊂图7 分数阶P I D 控制㊁整数阶P I D 控制和无控制下系统阶跃输出5.2 台架试验在实车试验前,设计试验台架以验证系统的可靠性㊂试验台架中第一轴和第三轴用两个安装了转角传感器的转向主销代替㊂第一轴转向用手柄模拟㊂转角通过两个主销的转动量指针和刻度盘来读取㊂第一轴外轮最大转角27°,内轮的最大转角33°,第三轴转角随第一轴转角的变化关系如图8所示,其中,曲线1表示无电控液压转向系统时第(a )v =10m /s(b )v =20m /s图8 分数阶P I D 控制㊁整数阶P I D 控制和无电控液压转向系统下第三轴转角及其期望转角的误差三轴转角与期望转角的差,曲线2表示无电控液压转向系统时第三轴转角,曲线3表示整数阶P I D 控制下的第三轴转角与期望转角的差,曲线4表示整数阶P I D 控制下的第三轴转角,曲线5表示分数阶P I D 控制下的第三轴转角与期望转角的差,曲线6表示分数阶P I D 控制下的第三轴转角,曲线7表示第三轴期望转角㊂可以看出,在v =10m /s 和v =20m /s 时,使用分数阶P I D 控制器后第三轴的实际转角和第三轴预期转角的误差值都在允许的误差值(±0.3°)内,且使用分数阶P I D 控制的第三轴转向效果比使用整数阶P I D 和不使用第三轴电控液压转向系统的效果都要好㊂5.3 实车试验为了验证该电控液压转向系统在车辆实际运行过程中的转向效果,进行了实车试验㊂比较未安装电控液压转向系统空载转向后轮胎的磨损情况(图9a )和安装分数阶控制器的电控液压转向系统空载转向后轮胎的磨损情况(图9b )后,可以非常明显的看出,图9a 中轮胎磨损严重,图9b 中轮胎磨损较小㊂安装分数阶控制器的电控液压转向系统后,车辆空载转向工况下轮胎的磨损情况得到很大的改善㊂图9c 中,车辆加载铁块,第三轴承重最大,单轴承载7.5t ㊂试验过程中车辆在正常行驶时运行良好且没有出现轮胎磨损现象,如图9d 所示㊂说明安装分数阶控制器的电控液压转向系统后,车辆满载转向工况下轮胎的磨损情况也得到很大的改善㊂(a)未安装电控液压转向系统空载转向后轮胎的磨损情况(b )安装分数阶P I D 电控液压转向系统空载转向后轮胎的磨损情况(c )满载试验(d)满载试验后轮胎磨损情况图9 实车试验6 结论(1)重点研究了电控液压转向系统的液压执行机构,由于该机构中设有对中自锁油缸,使得长㊃2103㊃中国机械工程第26卷第22期2015年11月下半月Copyright ©博看网. All Rights Reserved.时间直线行驶时第三轴不会发生自动偏转㊂(2)建立了电控液压转向系统模型及分数阶P I D控制器并解出了控制器参数㊂仿真结果验证了P I D控制器参数求取方法的正确性㊂(3)进行了台架试验,结果表明安装分数阶P I D控制的电控液压转向系统后,第三轴实际转角比整数阶或不安装电控液压转向系统更接近期望转角,且误差很小㊂进行了实车试验,发现在空载和满载下安装分数阶P I D控制的电控液压转向系统比不安装的系统,轮胎磨损得到了改善㊂参考文献:[1] 刘少君.多轴车辆第三轴电控液压转向系统研究[D].合肥:合肥工业大学,2013.[2] Z h u Y o n g q i a n g,Z h a n g P i n g x i a.S t e e r i n g A n a l y s i so f M u l t i‐a x l e V e h i c l e B a s e d o n A D AM S/V I E W[C]//2n d I n t e r n a t i o n a l C o n f e r e n c e o n A d v a n c e dE n g i n e e r i n g M a t e r i a l sa n d T e c h n o l o g y(A E M T).Z h u h a i,C h i n a,2012:2878‐2881.[3] L i uY u n.O p t i m u m D e s i g no fM u l t i‐a x l eT r a i l e r’sS t e e r i n g M e c h a n i s m B a s e do nA D AM S[C]//I n t e r-n a t i o n a l C o n f e r e n c e o nG r e e nP o w e r,M a t e r i a l s a n dM a n u f a c t u r i n g T e c h n o l o g y a n dA p p l i c a t i o n s(G P M-M T A2011).C h o n g q i n g,2011:289‐293. [4] W a n g S h u f e n g,Z h a n g J u n y o u.T h e D e s i g na n dP e r f o r m a n c eA n a l y s i s o fM u l t i‐a x l eD y n a m i cS t e e r-i n g S y s t e m[C]//I n t e r n a t i o n a lC o n f e r e n c eo n A p-p l i e d M e c h a n i c s a n d M e c h a n i c a lE n g i n e e r i n g.C h a n-g s h a,2010:756‐761.[5] W a n g S h u f e n g,L iH u a s h i.A n a l y s i s o fV e h i c l eP a-r a m e t e r sE f f e c t s o nS t e e r i n g P e r f o r m a n c e o fT h r e e‐A x l eV e h i c l ew i t h M u l t i‐a x l eS t e e r i n g[C]//2n dI n-t e r n a t i o n a lC o n f e r e n c e o n M o d e l l i n g a n d S i m u l a-t i o n.T o k y o,2009:240‐244.[6] 王云超.多轴转向车辆转向性能研究[D].长春:吉林大学,2007.[7] 韩汪利.多轴车辆转向控制系统设计及仿真[D].长沙:湖南大学,2011.[8] 田阳阳.多轴车辆电液比例转向控制系统研究[D].长春:吉林大学,2008.[9] 江桂云,王勇勤,严兴春.液压伺服阀控缸动态特性数学建模及仿真分析[J].四川大学学报(工程科学版),2008,40(5):195‐198.J i a n g G u i y a n,W a n g Y o n g q i n g,Y a n X i n g c h u n.M a t h e m a t i c s M o d e l i n g a n dS i m u l a t i o n A n a l y s i so fD y n a m i cC h a r a c t e r i s t i c sf o r H y d r a u l i cC y l i n d e rb yS e r v o‐v a l v e[J].J o u r n a l o f S i c h u a nU n i v e r s i t y(E n g i-n e e r i n g S c i e n c eE d i t i o n),2008,40(5):195‐198.[10] 王淼.分数阶控制器设计与仿真研究[D].北京:北京交通大学,2014.[11] K i r y a k o v aV.F r o mt h eH y p e r‐B e s s e l O p e r a t o r s o fD i m o v s k it ot h e G e n e r a l i z e d F r a c t i o n a l C a l c u l u s[J].F r a c t i o n a lC a l c u l u sa n d A p p l i e d A n a l y s i s,2014(12):977‐1000.[12] S r i v a s t a v aH M,G a b o u r y S,B a y a dA.E x p a n s i o nF o r m u l a sf o ra n E x t e n d e d H u r w i t z‐L e r c h Z e t aF u n c t i o nO b t a i n e dv i aF r a c t i o n a l C a l c u l u s[J].A d-v a n c e s i nD i f f e r e n c eE q u a t i o n s,2014(6):169.[13] V a l e r i oD,M a c h a d o JT,K i r y a k o v aV.S o m eP i o-n e e r so ft h e A p p l i c a t i o n s o f F r a c t i o n a l C a l c u l u s[J].F r a c t i o n a lC a l c u l u sa n d A p p l i e d A n a l y s i s,2014(6):552‐578.[14] M a c h a d oJT,K i r y a k o v aV,M a i n a r d iF.R e c e n tH i s t o r y o f F r a c t i o n a l C a l c u l u s[J].C o mm u n i c a t i o n si n N o n l i n e a r S c i e n c ea n d N u m e r i c a lS i m u l a t i o n,2011,16(3):1140‐1153.[15] 赵春娜.分数阶系统分析与设计[M].北京:国防工业出版社,2011.[16] 邓立为,宋申民,庞慧.控制系统的分数阶建模及分数阶P IλDμ控制器设计[J].电机与控制学报,2014,18(3):85‐92.D e n g L i w e i,S o n g S h e n m i n,P a n g H u i.F r a c t i o n a lO r d e r M o d e l f o rC o n t r o lS y s t e m a n d D e s i g n O f-f r a c t i o n a lO r d e rP IλDμC o n t r o l l e r[J].E l e c t r i cM a-c h i n e s a n dC o n t r o l,2014,18(3):95‐92.[17] Z h a o C h u n n a,X u eD i n g y u,C h e n Y a n g q u a n.AF r a c t i o n a l O r d e r P I D T u n i n g A l g o r i t h m f o r aC l a s s o f F r a c t i o n a l O r d e r P l a n t s[C]//I E E EI C MA.N i a g a r aF a l l s,2005:216‐221.(编辑 王旻玥)作者简介:钱立军,男,1962年生㊂合肥工业大学机械与汽车工程学院教授㊁博士研究生导师㊂主要研究方向为汽车现代设计理论与方法㊁电动汽车技术㊁汽车电子控制㊂胡伟龙,男,1988年生㊂合肥工业大学机械与汽车工程学院博士研究生㊂邱利宏,男,1989年生㊂合肥工业大学机械与汽车工程学院博士研究生㊂刘少君,男,1989年生㊂合肥工业大学机械与汽车工程学院硕士研究生㊂㊃3103㊃多轴车辆第三轴电控液压转向系统及其P I D控制 钱立军 胡伟龙 邱利宏等Copyright©博看网. All Rights Reserved.。
汽车动力转向器试验台测试系统设计

数据输出模块:该模块将处理后的数据上传至上位机监测程序,同时将数据 保存至本地数据库以供后续分析。
上位机监测程序:上位机监测程序采用WinCC编写,实现试验过程的实时监 控和数据可视化。程序中包括以下几个功能:
实时监控:通过与PLC通信,实时获取试验台的转速、位置、制动力矩等数 据,并在界面上显示。
数据存储:将获取的数据保存至本地数据库,以便后续分析和调用。
数据分析:通过对历史数据的分析,得出制动器的性能曲线、制动力矩随转 速变化曲线等,为操作人员提供参考。
系统实现
在完成硬件和软件设计后,需要进行系统实现。具体步骤如下:
1、根据设计图纸搭建试验台架,并完成电机、编码器、惯性飞轮等硬件的 安装与调试。
软件设计
汽车制动器惯性试验台的软件部分包括PLC程序和上位机监测程序。
PLC程序:PLC程序采用STEP 7编写,实现试验台的自动化控制。程序中包括 以下几个模块:
数据输入模块:该模块主要用于接收操作人员输入的参数,如试验速度、时 间等。
数据处理模块:该模块根据试验要求,对输入数据进行处理,如计算制动器 的制动力矩、转速等。
传感器选择:选择高精度、高可靠性的传感器,如力矩传感器、角度传感器、 位移传感器等,实现对动力转向器集处理:采用数据采集卡和计算机组成的数据采集处理系统,对传感 器采集的数据进行实时采集、处理、分析,以提高测试效率。
2、软件设计测试软件是整个测试系统的核心,应具有以下功能:
汽车动力转向器试验台测试系统设 计
01 引言
03 系统设计 05 总结与展望
目录
02 需求分析 04 试验验证 06 参考内容
引言
汽车动力转向器是汽车的重要组成部件之一,其性能直接影响着汽车的安全 性和舒适性。因此,对于汽车动力转向器的性能测试和可靠性验证显得尤为重要。 本次演示将介绍一种汽车动力转向器试验台测试系统的设计方法,该系统旨在满 足各种测试需求,提供精确、可靠的测试结果,为汽车动力转向器的研发和生产 提供强有力的支持。
基于模糊PID控制的智能小车转向系统设计
基于模糊PID控制的智能小车转向系统设计一、引言智能小车是一种具备自主行驶能力的机器人,广泛应用于工业、仓储、物流等领域。
其中,转向系统的设计是实现智能小车自主导航和路径规划的关键环节。
在本文中,将介绍一种基于模糊PID控制的智能小车转向系统设计方案。
1.系统结构智能小车转向系统的主要组成部分包括传感器、控制器和执行器。
其中传感器用于感知环境和获取车辆当前状态信息,控制器用于分析传感器信息并生成控制指令,执行器则根据控制指令进行相应动作。
2.环境感知为了实现智能小车的自主导航,需要通过传感器获取车辆当前所处位置和周围环境的信息。
一种常用的方法是使用激光雷达进行环境感知,通过扫描周围环境的障碍物,生成地图并定位当前位置。
3.控制算法在智能小车转向系统中,常用的控制算法是PID控制算法。
PID控制算法基于车辆当前位置和目标位置的差异,通过计算比例、积分和微分调节参数,生成控制指令,实现车辆转向。
然而,传统PID控制算法对于非线性和时变系统的控制效果有限。
为了克服这一缺点,本文采用模糊控制器结合PID控制的方式,提高控制算法的适应性和鲁棒性。
模糊控制器能够通过建立一套规则库,根据当前输入变量和模糊规则库进行模糊推理,确定输出变量的控制值。
模糊PID控制算法能够在控制过程中根据系统自身的特性自适应调整。
4.系统建模与仿真为了验证设计方案的可行性和有效性,可以使用Matlab/Simulink等软件进行智能小车转向系统的建模与仿真。
通过建立车辆动力学模型,并引入传感器准确度模型和控制指令噪声模型,得到系统的闭环模型。
在仿真过程中,可以设置不同的路线和障碍物,观察智能小车的转向行为和控制效果。
通过对比不同控制算法的性能指标,选择最佳的转向控制策略。
三、实验结果与讨论在实际实验中,基于模糊PID控制的智能小车转向系统设计表现出较好的性能。
通过采用模糊控制器,系统的抗干扰能力和适应性得到了显著提高。
然而,该设计方案还存在一些改进空间。
电动助力转向综合前馈和模糊PID反馈的电流控制算法
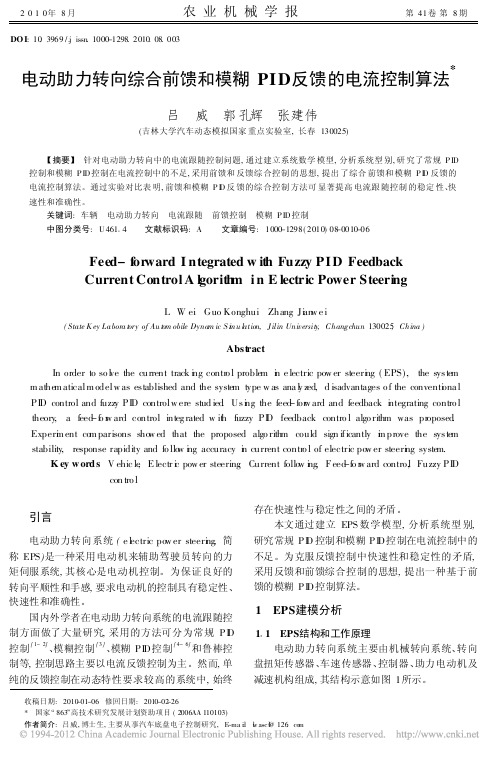
2010年8月农业机械学报第41卷第8期DO I :10.3969/.j issn .1000-1298.2010.08.003电动助力转向综合前馈和模糊PID 反馈的电流控制算法*吕 威 郭孔辉 张建伟(吉林大学汽车动态模拟国家重点实验室,长春130025)=摘要> 针对电动助力转向中的电流跟随控制问题,通过建立系统数学模型,分析系统型别,研究了常规P ID 控制和模糊P ID 控制在电流控制中的不足,采用前馈和反馈综合控制的思想,提出了综合前馈和模糊P I D 反馈的电流控制算法。
通过实验对比表明,前馈和模糊P I D 反馈的综合控制方法可显著提高电流跟随控制的稳定性、快速性和准确性。
关键词:车辆 电动助力转向 电流跟随 前馈控制 模糊P ID 控制中图分类号:U 46114文献标识码:A文章编号:1000-1298(2010)08-0010-06Feed-for ward I ntegrated w ith Fuzzy PID FeedbackCurrent Control A l gorith m i n E lectric Power Steeri ngL W ei Guo Konghui Zhang Ji a n w e i(State K ey Labora t ory of Au t om obile Dyna m ic S i m u l ation,J ilin Universit y,Changchun 130025,China )Abst ractIn order to so l v e the current track i n g contr o l proble m i n e lectric pow er steeri n g (EPS),the syste mm athe m aticalm odelw as established and the syste m type w as ana l y zed,d isadvantages o f the conventi o na l PI D control and fuzzy PI D controlw ere stud ied .Usi n g the feed -for w ard and feedback i n tegrating contro l theory ,a feed -f o r w ard control integ rated w it h fuzzy PI D feedback contro l algo rithm was pr oposed .Experi m ent co m parisons sho w ed that the proposed algo rithm could sign ificantly i m prove the syste m stability ,response rapidity and fo llo w i n g accuracy i n current contr o l of electric po w er steeri n g syste m.K ey w ords V ehic le ,E lectr i c pow er steering ,Current follo w i n g ,Feed -fo r w ard contro,l Fuzzy PI Dcon tro l收稿日期:2010-01-06 修回日期:2010-02-26*国家/8630高技术研究发展计划资助项目(2006AA 110103)作者简介:吕威,博士生,主要从事汽车底盘电子控制研究,E -ma i :l l w asc@l 126.co m引言电动助力转向系统(e l e ctric po w er steeri n g ,简称EPS )是一种采用电动机来辅助驾驶员转向的力矩伺服系统,其核心是电动机控制。
纯电动智能车辆线控转向系统设计与控制方法

实验验证
实验验证
为了验证所设计的纯电动智能车辆线控转向系统的有效性,需要进行实验验 证。实验流程包括以下步骤:
实验验证
1、搭建实验平台:组建纯电动智能车辆线控转向系统实验平台,包括车辆、 传感器、执行器、控制器等部件。
实验验证
2、数据采集:在实验过程中,通过传感器采集车辆的状态信息,如车速、角 速度、横摆角等。
实验验证
3、控制策略实施:根据所设计的控制策略,将控制指令发送给执行器,实现 线控转向系统的控制。
实验验证
4、实验结果分析:对实验数据进行整理和分析,对比不同控制策略下的实验 结果,评估所设计的纯电动智能车辆线控转向系统的性能。
实验验证
通过实验验证,可以证明所设计的纯电动智能车辆线控转向系统能够达到预 期效果。与传统的机械转向系统相比,线控转向系统具有更高的灵活性和可靠性, 能够更好地适应复杂路况和行驶需求。同时,应用PID控制、模糊控制或神经网 络控制等算法,可以进一步提高转向系统的性能和稳定性。
结论
结论
本次演示对纯电动智能车辆线控转向系统设计与控制方法进行了深入研究。 首先介绍了研究背景和研究现状,然后详细阐述了线控转向系统的设计方法,包 括系统架构、传感器、执行器、控制器等。接着介绍了PID控制、模糊控制和神 经网络控制等常用的控制方法,并分析了每种方法的优缺点。最后通过实验验证 了所设计的纯电动智能车辆线控转向系统的有效性。
系统设计
系统设计
在纯电动智能车辆线控转向系统设计方面,需要考虑到以下几个方面:
系统设计
1、系统架构:包括传感器、执行器、控器等部件的选型和布局。系统设计
2、传感器设计:为了实现精确的转向控制,需要选择合适的传感器来获取车 况信息。
汽车四轮转向的PID控制方法研究毕业论文设计
汽车四轮转向的PID控制方法研究毕业论文设计本科毕业设计(论文)题目汽车四轮转向的PID控制方法研究毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
涉密论文按学校规定处理。
作者签名:日期:年月日导师签名:日期:年月日注意事项1.设计(论文)的内容包括:1)封面(按教务处制定的标准封面格式制作)2)原创性声明3)中文摘要(300字左右)、关键词4)外文摘要、关键词5)目次页(附件不统一编入)6)论文主体部分:引言(或绪论)、正文、结论7)参考文献8)致谢9)附录(对论文支持必要时)2.论文字数要求:理工类设计(论文)正文字数不少于1万字(不包括图纸、程序清单等),文科类论文正文字数不少于1.2万字。
线控转向系统路感PID控制仿真研究
1 S W 的特 点 及 路 感 反 映 B
在线 控 转 向系统 中 , 驶员 的转 向操 作 与转 向车 轮 之 间通 过 信 号 、 制 器 、 行器 柔 性 连接 , 驾 控 执 驾驶 员 仅需 向车辆输 入 自己的转 向操 作 , 制 器根 据 驾驶 员 的操 作 、 控 当前 车辆 状 态 和路 面 状 况 确定 合理 的前 轮 转角 , 制转 向电机完 成转 向任 务 。 控 驾驶 员 的“ 路感 ” 指在 一定 侧 向加 速度 下 , 是 作用 于 转 向轮 上 的转 向阻 力矩 在 方 向盘 上 产生 的手 感 , 能够 向驾驶 员 提供 路 面信息 ] 。在 S W 中 , B 驾驶员 的“ 感 ” 过 回正 力 矩 电机 模 拟生 成 。 电子控 制 系 路 通 统从 信号 中取 出最 能够 反 映汽 车行 驶状 态 和路 面状 况 的信 、作 为 方 向盘 回正 力矩 的控 制 变量 , 向盘 皂, 方 向驾驶 员 只提 供有 用信 息 , 而 提供 符合 驾驶 员 需要 的“ 从 路感 ” 。
维普资讯
第l 6卷
第 2期
山东交通学院学报
J OURNAL OF S HANDONG JAOTONG I UNI VERSTY I
Vn . 6 No 2 1 1 .
20 0 8年 6月
Jn2 0 u .0 8
线 控 转 向 系 统 路 感 P 系
一
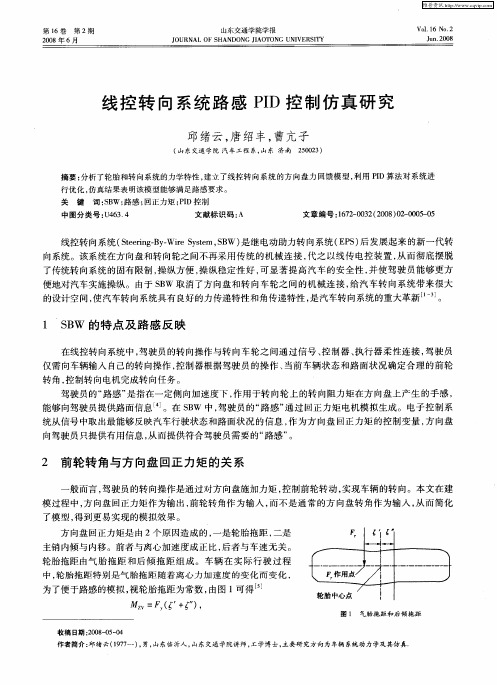
般 而言 , 驾驶 员 的转 向操 作是 通过 对 方 向盘施 加力 矩 , 控制 前轮 转 动 , 现 车辆 的转 向。本 文在 建 实
模 过 程 中 , 向盘 回正 力矩 作为 输 出 , 轮转 角作 为 输 入 , 不 是 通 常 的方 向盘 转 角作 为 输入 , 而 简 化 方 前 而 从
汽车电动助力转向系统控制策略及仿真研究
汽车电动助力转向系统控制策略及仿真研究首先,本文介绍了汽车电动助力转向系统的原理和结构。
汽车电动助力转向系统由电动电机、转向机构和控制单元组成。
电动电机通过转向机构与汽车的转向轴相连接,当驾驶者转动方向盘时,电动电机会提供相应的力量辅助转向。
接下来,本文提出了一种基于PID控制的汽车电动助力转向系统控制策略。
PID控制是一种经典的控制方法,通过不断调节比例、积分和微分三个控制参数,使得系统的输出能够稳定地跟踪期望的轨迹。
在汽车电动助力转向系统中,PID控制可以通过测量转向轴的角度和驾驶者的方向盘输入来自动计算出合适的转向力量,以达到准确转向的目的。
为了验证PID控制策略的有效性,本文利用Simulink工具进行了仿真实验。
仿真实验采用了真实的汽车转向系统参数,通过输入不同的方向盘转动信号,模拟不同的转向操作。
实验结果表明,基于PID控制的汽车电动助力转向系统能够准确地跟踪方向盘输入,并提供适当的转向力量,实现稳定的转向。
最后,本文总结了汽车电动助力转向系统控制策略及仿真研究的主要结果和贡献。
通过研究和仿真实验,本文验证了基于PID控制的汽车电动助力转向系统的有效性和稳定性。
这一研究为汽车电动助力转向系统的设计和控制提供了一定的参考和借鉴。
综上所述,本文对汽车电动助力转向系统的控制策略进行了研究,并进行了相关的仿真实验。
本文的研究结果表明,基于PID控制的汽车电动助力转向系统能够实现准确转向,并具有稳定性和可靠性,为汽车驾驶员提供了良好的转向体验。
但是,仍然有一些问题和挑战需要进一步研究和解决,比如如何提高转向系统的响应速度和抗干扰能力。
对于未来的研究,可以考虑将其他的控制方法应用到汽车电动助力转向系统中,并进一步优化转向系统的性能。
汽车四轮转向系统模糊PID控制仿真研究

第27期2018年9月No.27September ,2018汽车四轮转向系统模糊PID 控制仿真研究陈益新,陈炎冬*,华逸人(无锡太湖学院机电工程学院,江苏无锡214064)摘要:为提升汽车四轮转向系统的操纵性能,该研究通过比例前馈和模糊PID 反馈控制进行后轮主动转向控制。
以横摆角速度偏差及变化率作为模糊控制器输入,经过模糊推理输出PID 控制器3个参数,控制器的量化因子和比例因子采用经验法得到。
在Matlab/Simulink 中进行操纵稳定性指标对比仿真实验,结果表明,模糊PID 控制器时的转向系统3个指标的动态性能优于PID 控制器和二轮转向时的动态性能,且一定程度上超过理想比例控制的效果。
可见文章采用的四轮转向控制策略是有效的。
关键词:模糊PID 控制;四轮转向系统;前馈与反馈控制仿真中图分类号:TP13文献标识码:A江苏科技信息Jiangsu Science &Technology Information基金项目:江苏省大学生创新创业项目;项目编号:201713571010Y 。
江苏省高校自然科学研究项目;项目编号:18KJD460006。
作者简介:陈益新(1996—),男,江苏苏州人,本科生;研究方向:车辆四轮转向及控制。
*通信作者:陈炎冬(1983—),男,浙江金华人,讲师,硕士;研究方向:分数阶微积分理论及车辆动力学及控制算法。
引言模糊逻辑理论至今只有几十年的历史,但是这几十年间的研究成就却十分丰富,因此该种控制方法越来越成为国际社会的主流控制方法,模糊控制方法从1974年首次将模糊控制运用到实际生活开始,就不断地在应用领域得到发展,由于经典控制理论经常是理想的、线性的。
因此对于工业环境中出现的非线性不能很好地进行控制,而模糊控制却有极好的非线性,而且控制性好,更加可靠。
目前,汽车四轮转向控制应用了各种控制策略,模糊PID 控制已有一些研究[1-5],各有侧重,本文重点考虑通过模糊推理找到合适的PID 控制器的参数,同传统PID 控制器相比,使四轮转向系统的性能在一定程度上得到提高。
线控转向系统理想传动比控制研究
SUiXi罠验AUTOMOBILE APPLIED TECHNOLOGY2020年第22期10.16638/ki.1671-7988.2020.22.038线控转向系统理想传动比控制研究朱恒伟,张建臣,孟俊焕,刘豪睿,郑全,苏世耀(德州学院,山东德州253000)摘要:传统的汽车转向系统多为固定传动比或是传动比变化值较小的形式,汽车在实际转向时由于路况不同、车速的变化以及整车其他系统的非线性变化,对汽车转向响应特性影响较大,驾驶员在转向操作时,常常需要通过时时校正方向盘来补偿汽车横向行驶的稳定性,增加了操作负担和行驶风险。
而文章试图通过对线控转向系统不同工况下的理想传动比进行研究,找到理想传动比变化规律,改善汽车的操纵稳定性和行驶安全性。
关键词:线控转向;转向响应特性;操纵稳定性中图分类号:U463.4文献标识码:A文章编号:1671-7988(2020)22-110-03Research on Ideal Transmission Ratio Control of Wire Steering System Zhu Hengwei,Zhang Jianchen,Meng Junhuan,Liu Haorui,Zheng Quan,Su Shiyao(Dezhou College,Shandong Dezhou253000)Abstract:Traditional automobile steering system for fixed ratio or smaller values of the ratio changes of forms,due to different road conditions and the speed of t he car when the car in the actual to the change of the nonlinear changes,and other systems for vehicle steering response for cars,drivers in steering operation,often need to pass all the correction of the steering wheel to compensate for the cars drive lateral stability,increased the burden and risk.By studying the ideal transmission ratio under different working conditions of the drive-by-wire steering system,this paper tries to find out the changing law of the ideal transmission ratio and improve the vehicle handling stability and form safety.Keywords:SBW;Steering response characteristic;Handling stabilityCLC NO.:U463.4Document Code:A Article ID:1671-7988(2020)22-110-03____1—刖言传统的汽车转向系统由于整个转向传动机构都是由机械结构连接,其在转向操作过程中传动比很难改变,因此在不同工况下很难保证汽车都具有良好的转向特性,并且也不容易实现基于无人驾驶的主动转向控制。
线控转向系统变传动比特性及稳定性控制研究

摘要线控转向系统变传动比特性及稳定性控制研究 线控转向系统是一种新兴的汽车转向系统。
与传统的机械转向系统不同,线控转向系统中转向盘和转向器之间没有刚性的机械连接,整个转向系统的机械部分只有转向盘模块和转向执行模块,且两模块间的信息传递完全由电信号取代,每个模块配有一个电机来提供动力输入。
转向执行模块的电机负责驱动转向轮,而转向盘模块的电机负责模拟机械转向系统中,路面传递给转向盘的路感力矩。
两模块间通过中央控制器进行电信号的传输,设定控制器中的控制算法来调控两个电机,进而实现整个线控转向系统的运转。
本文使用两两对比的方式,对线控转向系统的模型搭建,传动比设计和稳定性控制进行深入研究。
并将双向控制理论应用于线控转向系统的结构设计和建模思路上,最后采用无源控制中的波变量法,设计波变量控制器来保证系统的整体稳定性。
本文的主要工作内容如下:1.模型的建立及仿真验证本文采用Simulink与CarSim联合建模的方法对车辆模型建模。
设计了两种不同的建模思路,通过实验仿真对两种建模思路的优缺点进行对比分析。
最后选取了仿真效果更佳的方法,即通过设置CarSim中转向系统参数并采用三环PID控制器对转型执行电机进行控制的建模方法。
2.变角传动比设计本文对比了两种不同的变角传动比设计方法,分析了定增益法的不足,并依此改进了设计方法。
采用恒定车速定横摆角速度增益和转向灵敏度两个指标,对变角传动比进行设计。
并对随车速变化的角传动比和随小齿轮转角变化的角传动比分别设计拟合,最后给出整体的线控转向系统变角传动比特性。
3.线控转向系统双向控制结构和力传动比特性研究采用双向控制理论对线控转向系统结构进行设计,通过阅读大量文献对不同双向控制结构的线控转向系统进行对比分析,选取了应用广泛且结构简单的力反馈-位置型I线控转向系统双向控制结构,并依此结构进行力传动比特性的设计和整体模型的完善。
4.线控转向系统稳定性控制研究采用无源理论对线控转向系统的稳定性进行研究。
汽车线传转向系统的转向盘操纵识别与双向同步控制
汽车线传转向系统的转向盘操纵识别与双向同步控制李尚司;蔡智凯;陈曦;连小珉【摘要】为了实现汽车线传转向系统对传统机械转向系统基本转向回正功能的模拟再生,首先根据转向盘转矩变化率对转向盘操纵模式进行识别,完成线传转向系统中电控方向机的主从工作模式转换判断.运用PID的转角闭环控制,实现线传转向系统的双向同步控制,包括电控方向机主动模式中转向机小齿轮的转角跟随及电控方向机从动模式中转向盘的转角跟随.通过台架试验验证了转矩变化率识别法和双向同步控制的可行性.【期刊名称】《汽车技术》【年(卷),期】2015(000)012【总页数】5页(P17-21)【关键词】线传转向系统;转向盘操纵识别;双向同步控制;PID【作者】李尚司;蔡智凯;陈曦;连小珉【作者单位】清华大学汽车安全与节能国家重点实验室;清华大学汽车安全与节能国家重点实验室;清华大学汽车安全与节能国家重点实验室;清华大学汽车安全与节能国家重点实验室【正文语种】中文【中图分类】U463.4汽车线传转向系统取消了转向盘与转向器之间的直接机械连接,主要由电控方向机与电控转向机进行控制,电控方向机与电控转向机之间的角度信息与力矩信息交互通过线传递进行。
相比于现阶段应用在量产车上的传统机械转向系统,汽车线传转向系统具有提高汽车操纵稳定性、提高被动安全性及改善驾驶环境等一系列优势。
目前有关线传转向系统回正控制的研究[1~4]集中在主动控制转向盘回正及车轮转角随动跟踪控制方面。
这些控制方法能够保证回正没有振荡,但未考虑汽车在车轮回正力矩下的回正特性,会降低汽车的操纵性能。
为此,本文在现有控制方法基础上设计了一种汽车线传转向系统的双向同步控制策略,通过对电控方向机和电控转向机在不同模式下的主动-从动切换协调控制,考虑汽车自由回正特性,提高汽车的操纵性能。
首先根据转向盘部分的转矩变化率[5],对不同的转向盘操纵模式进行识别;然后对不同转向盘操纵模式下电控方向机与电控转向机的主从控制关系进行分类考虑,以PID(比例积分微分)控制进行从动机的跟踪随动控制;最后通过试验台架进行试验,验证汽车线传转向系统转向盘操纵识别与双向同步控制的可行性与合理性。
汽车线控转向硬件在环实验台研究现状
汽车线控转向硬件在环实验台研究现状综述摘要:概述了国内外线控转向实验台发展现状,描述了线控转向实验台相关重要组成部分,分析了国内外相关高校的实验台设计方案优缺点,最后简述了本单位自主研发线控转向实验台设计思路及主要功能。
关键词:线控转向;实验台;发展现状;设计方案转向系统作为“人-车”交换界面,其性能好坏直接影响汽车的操纵稳定性、驾驶舒适性及行驶安全性。
线控转向作为转向技术发展的必然阶段,特征表现为:通过电信号传递控制取代了方向盘与转向执行机构间的机械部分,以获得更稳定、更安全、更舒适、更智能的转向系统。
线控转向硬件在环实验台作为介于虚拟软件仿真和实物实验之间的重要实验方式,在获得高仿真度的同时,还可以灵活的进行一些实际中不可能或不易进行的实验,如故障模拟、故障诊断、软件测试及紧急状况处理等。
通过相对更安全的台架实验,可以测试得到线控转向系统的各项参数及主要性能指标,进而对线控转向控制算法进行设计和改进,提高系统可靠性。
线控转向实验台需要满足下述功能:1)SBW系统驾驶员路感特性研究;2)SBW 系统控制策略研究;3)系统中相关电机控制策略及算法验证;4)系统故障诊断策略研究与验证;5)模拟动画实时显示;6)模拟不同工况下的阻力。
线控转向实验台不仅要为线控转向研究提供复杂的模拟、检验、调整以及验证平台,还需为实验人员提供真实的驾驶体验,以实现“人-车-路”的实时闭环仿真平台。
1 国内外现状随着计算机技术的发展,线控转向及线控转向实验台逐渐成为当今汽车行业与科研机构研究的热点。
由于西方国家针对线控转向的理论研究及概念机研发起步较早,故在线控转向实验台的研究领域也较为深入,目前已取得了一定实用性成果。
1.1亚洲各国SBW实验台发展与现状韩国汉阳大学[1]线控转向实验台主要由液压阻力模拟系统、实时控制器、线控转向系统等部件组成。
通过电机实现路感模拟和转向操纵功能;液压系统用来模拟转向阻力;通过信号发生器模拟输入,反映车辆运行状态下的各类信号;利用数字信号处理器处理和分析各种输入信号,对系统进行实时控制;最终通过主控制计算机控制整个系统,分析各种反馈信息及向各驱动器发送执行指令,保证系统正常运行。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
行离线 PID整定 。对 比实物试验与仿真结果 ,结果 表明 2组试 验阶跃 响应指标误差在 1.44%左右 。通过此方法可
缩短 PID整定时 间 ,减轻实验人员工作量。
关键词 :转 向驱动 系统 ;线控转 向实验台 ;系统辨 识 ;PID控码 :A
在 系统 控制 策略设 计 中 ,控 制器 参数 的确 定 主 要 有工 程方 法 和理论 方法 。工 程方 法不 用建模 ,但 存在调试 困难 、不易得到最佳效果等缺点 ,且真机 调 试 消耗资 源 ,甚 至 可能损 坏设 备 。本 文 中在对 转 向驱动 系统 的控 制 中 ,拟 采用 理论方 法 来克 服这 些 缺点 ,基于Matlab系统辨识工具箱对某国外 EPS转 向梯形 硬件 进行 系统 辨识 ,得 到转 向驱 动 系统数 学 模 型 。利 用 Matlab/Simulink离 线 整定 出对 此 传 递 函数有 效控 制 的 PID参数 。
Abstract:The steer ing dr ive system used in the research group was mechanically and electr ically disas— sembled and ana lyzed,the structure of the system transfer function was der ived.Based on Matlab Sys— tem Identif ication Toolbox.the transfer function was identif ied and obtained.Compared with the physi. cal test data。the correctness of identification of the transfer function was ver if ied.Based on Matlab/ Simulink,the PID control parameters of the transfer function were tuned off line.The physica l test and simulation results were compared.The results show the two exper imental step response error indicators is around 1.44% .By this method,PID tuning time can be shortened and laboratory personnel workload can be reduced. Key words:steer ing dr ive system;steer—-by—‘wire test bench;system identif ication;PID control
度 与 角速度 关 系式 (2)代 人式 (1)中 ,得 到直 流 电机
转角 (s)关于电压 v(s)变化的传递函数(式(3))。
图 1 SBW 硬 件 在 环 实 验 台转 向驱 动 系 统 组 成 图
O(s)= (s){
(2)
移传感器采集的转角信号进行误差处理计算 ,得到 相应的PWM信号 ,并驱动转 向驱动系统的电机 ,经 过蜗轮蜗杆 、齿轮齿条 2级机械减速机构 ,拉动转 向节臂 带动 转 向轮转 动相应 的转角 。
第 30卷 第 2期 2016年 6月
湖 北汽 车工 业 学院 学报
Journal of Hubei University of Automotive Technology
Vo1.30 No.2 Jun.2016
doi:10.3969 ̄.issn.1008—5483.2016.02.001
一 2一
湖北 汽车工业 学院学报
2016年 6月
(s)为 电机加载电压 的拉斯变换 ,V;Tl为电磁 时 间 常数 ;rm为机 械 时间常数 ;C 为反 电势 常数 。
由于线 控 转 向 的控 制 中 ,角度 作 为 控 制量 ,需
要得到角度 (s)关于电压 v(s)的变化关系,将角
好 坏 直接影 响 实验 台 的仿 真精 度 。 转 向驱 动 系统 也 是 线 控转 向系 统 的重 要 硬件
组成 ,由电控单元 (ECU)、转 向驱动器、信号传感器 3个 部 分组 成 ,如 图 1所 示 。 当 ECU获取 上 位 机发 送 的车速 、目标转角等整车状态信号时 ,结合角位
收稿 日期 :2016—04—27 基金项 目:湖北省科技支撑计划项 目(2015BAA046);湖北省 自然科学基金项 目(2013CFA134):
汽车动力传动与电子控制湖北省重点实验室项 目(ZDK201214) 作者简介 :余 颖弘(1991一),男 ,湖北荆州人 ,硕士生 ,从事 汽车动力学仿 真与控 制研究 。 E-mail:79824220@qq-c0m
文章编 号 :1008—5483(2016)02—0001—04
Identification and PID Control of Steering Drive System for Vehicle Steer-by 。wire Test Bench
Yu Yinghong,Wang Baohua (School of Automotive Engineering,Hubei University of Automotive Technology,Shiyan 4 2002,China)
汽 车线 控 转 向(steer ing-by一 re,SBw )硬件 在 环 实验 台具 有很 高 的仿 真度 ,可 以灵 活地进 行一 些 实 际 中不可 能或 不易 进行 的实 验 ,是介 于虚 拟软 件 仿 真 和 实 物 实验 之 间 的重 要 实 验 方 式 n 。其 中转 向驱动系统作为实验台的重要硬件组成 ,对其控制
汽 车线控 转 向实验 台转 向驱动 系统 的辨识 及 其 Pl D控 制
余 颖 弘 ,王 保 华
(湖北汽车工业学院 汽车工程学院 ,湖北 十堰 442002)
摘 要 :对本课题组采用 的转 向驱动系统进行机 电分解 ,推导得 到系统传递 函数结构 。基 于 Matlab系统辨识工具
箱 ,辨识得到其传 递函数 ,对 比实物试验 数据 ,验证 了辨识传 函正确性 。利用 Matlab/Simulink对辨识传递 函数进