东北大学 复杂工业过程的智能控制与优化
工业过程控制与优化
工业过程控制与优化一、引言随着机械化、自动化和信息化技术的不断发展,工业生产过程中的控制与优化变得越来越重要。
在这个过程中,工业过程控制技术是实现自动化生产、提高生产效率、降低成本的关键所在。
因此,本文将讨论工业过程控制与优化的相关内容,主要包括传感器、控制器、调节器等基础技术,以及现代控制理论与智能化控制技术的应用。
二、传感器技术在工业过程控制中的应用传感器技术在工业过程控制中扮演着举足轻重的角色。
传感器用于测量生产工艺中的各种参数,如温度、压力、流量、液位等,将这些参数转换为电信号输出,然后通过控制器对生产过程进行调节,从而实现生产自动化。
在工业生产中,常用的传感器有以下几种:(1)温度传感器温度传感器是工业自动化的重要组成部分,它用于对各个工艺设备的温度进行实时监测。
温度传感器有多种类型,如热电偶、热电阻、红外线测温等,不同的类型适用于不同的环境和工艺需求。
(2)压力传感器压力传感器广泛用于生产过程中的气体和液体压力的测量。
它可以测量各种压力范围,如微小的气压、高压气缸和油气管道中的压力。
常见的压力传感器有压阻型传感器、压力电容传感器和压力电势传感器等。
(3)液位传感器液位传感器广泛应用于各种液体储罐、化学反应器、蒸馏塔等容器的液位测量。
液位传感器的种类繁多,包括浮球式液位传感器、超声波液位传感器、压阻液位传感器和电容式液位传感器等。
三、控制器技术在工业过程控制中的应用控制器是自动化生产过程中的控制中心,它用于对采集到的各种参数进行处理及控制,从而实现自动化控制。
常见的控制器类型有以下几种:(1)PLC(可编程逻辑控制器)PLC 是一种专门用于工业自动化的数字电子计算机。
PLC 可以模拟机械继电器的功能,可通过编程实现感应、计量、控制、保护等多种功能。
PLC 已经成为自动化生产控制系统中不可替代的一部分。
(2)DCS(分布式控制系统)DCS 是一种分散的控制系统,用于控制工业生产中的各种过程。
东北大学信息学院导师

音视频信号处理
嵌入式系统
数字信号处理 嵌入式计算机及其开发技术的研究 流量工程技术 三维成像 计算机网络安全 CAD
软件无线电 移动通信系统及关键 技术的研究
自适应盲信号分离与图像处 信号检测与估值技术 理 的研究及应用 宽带交换网络中的QoS路由 智能光网络及光网络 技术 生存性 智能图像处理 计算机网络通信技术 计算机网络与通信 图像处理与模式识别 计算机视觉 模式识别 足球机器人与教育机器人 模式识别 通信编码
复杂工业过程建模与优化控 智能优化方法及其应 复杂工业过程故障监测与诊断 制 用 复杂工业过程建模、控制与 复杂工业过程综合自 传动与计算机控制 优化 动化 生产过程自动控制
智能控制理论与应用
复杂过程建模、控制 与优化
复杂系统建模与优化
智能优化算法
生产与服务系统的管理技术
弹复性工程与紧急响 应
系统工程研究所
*研究方向二
*研究方向三
研究方向四
分布式仿真
复杂工业过程建模、控制与 智能解耦控制 优化 流程工业综合自动化 光纤传感器技术 软测量技术 生产执行系统 光电检测技术 自动化测试技术与仪器
智能检测技术
智能控制技术
红外辐射测温理论与技术 梅国辉 李新光 刘克金 邵富群 石亚和 红外辐射测温技术
图像处理技术的研究 与应用 生产过程参数检测、系统建模与优化控制 连铸参数检测 建模与优化
工业过程数学模型研究 数字图像处理 复杂系统的智能控制 网络应用 网络应用 网络应用 网络应用 网络应用 网络应用 网络应用 无线通信 过程监测诊断控制 人工智能
系统仿真技术
人工智能识别与分析技术
计算机应用
复杂工业过程建模、 计算机仿真技术 仿真与控制 智能优化方法及应用 基于视频的智能交通系统 数据库应用 数据库应用 数据库应用 数据库应用 数据库应用 数据库应用 数据库应用 信号处理 自适应控制 信息挖掘 信息挖掘 信息挖掘 信息挖掘 信息挖掘 信息挖掘 信息挖掘 信息挖掘 网络应用 通信网络系统控制 数据库应用 计算机网络
工业自动化领域的领军者_记中国工程院院士_东北大学教授柴天佑

柴天佑教授于1947年出生在甘肃省兰州市,1963年在西北师大附中毕业,现为东北大学自动化研究中心主任,中国工程院院士,国际知名的控制科学与工程专家,国家冶金自动化工程技术研究中心主任,国家863计划先进制造与自动化领域专家委员会副主任,国家重点基础研究发展计划(973计划)项目首席科学家。
他率先在国际上提出并建立多变量自适应解耦控制理论与方法,带领一批科研人员研究开发出具有自主知识产权的多变量智能解耦技术,改造冶金、电力等行业,创造经济效益数亿元。
他先后荣获国家科技进步二等奖2项,省部级特等奖、一等奖8项,辽宁省科技功勋奖及全国五一劳动奖章、全国优秀教师、省特等劳动模范等荣誉称号。
他培养出的10名博士后、50余名博士和百余名硕士,如今都已成为工业自动化科研及应用领域的领军人物。
攻克难题建奇功对于柴天佑来说,2004年春天成了他的收获季节,年初刚当选为中国工程院院士,不久又捧回了省科技功勋奖。
这是他攻克难题建奇功的结果。
在工业生产领域,工业控制自动化是一个长期存在的难题。
以前的冶金、电力等行业生产采用的都是人工控制方法,逐项解决温度、压力等因素对生产的影响。
比如每一批煤的热值高低会有所不同,含水量的多少也不同,用人工控制方法就得逐批逐项地去适应不同类型的煤和不同的生产环境。
这样必然造成生产消耗高、产品质量差、企业效益低。
如何把各种因素影响程度降到最低,保证稳定运行并根据环境的变化调整生产?解决了这个难题,无疑就突破了复杂工业控制的第一道关卡。
柴天佑就选择了这个难题作为自己的主攻方向。
1985年,柴天佑首先在国际上提出多变量自适应解耦控制的研究理论,提出通过自动化控制解决所有影响工业生产过程中的不定性因素,把这些因素的相互作用降到最低,能提高工业产量、产品质量和产品效益。
凭此,他在东北大学拿到了工学博士学位并留校任教。
此后,他带领课题组将自适应解耦控制方法与智能控制、计算机集散控制技术相结合,研发了智能解耦控制技术及系统,并应用国产20万千瓦发电机组的钢球磨中储式制粉系统、进口30万千瓦发电机组的机炉协调等复杂工业过程,解决了能耗高、◆院士春秋◆工业自动化领域的领军者——记中国工程院院士、东北大学教授柴天佑翟厚宗污染重这一重大关键技术难题,取得显著经济效益和社会效益。
东北大学导师信息

究
交通系统
识别方法
复杂工业过程建模、 控制与优化
复杂系统综合自动化
机器视觉
电力系统的谐波分析 电力系统无功功率补 电力系统有源滤波器 软开关电力变换回路 直流开关电源及逆变
与抑制
尝技术的研究
的研究
及控制方式
器的软开关技术
数字图像处理
复杂工业过程建模、 仿真与控制
计算机仿真技术
秦皇岛分校
党群 网络应用
单位名称
姓名
*研究方向一
*研究方向二
*研究方向三
秦皇岛分校
白秋果
工程与环境检测技术 及智能仪器
计算机自动测试技术
嵌入式计算机系统
计算机软件与理论研究 所
鲍玉斌
数据库技术
研究方向四
研究方向五
备注
秦皇岛分校
才书训 人工智能
信息挖掘
数据库应用
计算机网络
计算机监控
自动化中心
柴天佑 多变量智能解耦控制 自适应控制
图像处理
的研究及应用
发技术的研究
技术的研究
流程工业综合自动化 与先进控制技术
智能控制理论与系统
故障检测与诊断方法
医学成像技术、图像 处理与人工智能
东软集团
江早 图像处理、数字放送
软件学院
姜慧妍 智能图像处理
模式识别
三维成像
CAD
专家系统
秦皇岛分校
蒋学英 网络应用
数据库应用
信息挖掘
秦皇岛分校
控制理论与导航技术研 究所
装置的故障诊断
研究
成控制
预测控制理论与应用
自适应控制理论与应 用
复杂工业系统建模、 控制与优化
东北大学信息科学与工程学院研究生导师研究方向总表

单位名称姓名性别职称学科*研究方向一*研究方向二*研究方向三研究方向四电力系统与电力传动研究所刘震男副教授电力系统及其自动化、电力电子与电力传动电力系统自动化电力系统信息化研究虚拟仪表在电力系统中的研究及应用电力系统与电力传动研究所满永奎男副教授电力系统及其自动化、电力电子与电力传动电能质量控制新型电力电子整流技术的研究电力系统及电力传动装置的故障诊断风力发电关键技术的研究电力系统与电力传动研究所王大志男教授电力电子与电力传动、电力系统及其自动化、控制理论与控制复杂系统建模与控制智能控制理论及其应用研究随机系统理论及应用复杂系统故障诊断技电气自动化研究所褚恩辉男副教授电力系统及其自动化、电力电子与电力传动电力系统的谐波分析与抑制电力系统无功功率补尝技术的研究电力系统有源滤波器的研究软开关电力变换回路及控制方式电气自动化研究所冯健男副教授电力系统及其自动化、电力电子与电力传动电能质量分析与控制电力系统SCADA技术电力系统优化运行控制智能过程控制电气自动化研究所李爱平女副教授电力系统及其自动化、电力电子与电力传动微型燃气轮机控制技术电力系统远程监控智能化电气传动系统控制电气设备网络远程控制技术电气自动化研究所佟玉鹏男副教授电力系统及其自动化、电力电子与电力传动电力系统无功补偿电力系统自动化高频开关电源研究变频调速控制电气自动化研究所王占山男副教授电力系统及其自动化、电力电子与电力传动无功优化负荷预测电力系统智能控制电气自动化研究所阎士杰男副教授电力系统及其自动化、电力电子与电力传动电力系统滤波和无功补偿电能质量分析与控制高压大功率交流调速系统高性能交流调速系统及其智能控制电气自动化研究所张化光男教授电力电子与电力传动、电力系统及其自动化、控制理论与控制电力系统自动化理论分析及应用大功率电机的节能控制理论及应用模糊自适应控制理论及应用复杂网络和混杂系统控制理论及应用电子科学与技术研究所康恩顺男副教授电路与系统电子技术应用 EDA技术应用智能控制电子科学与技术研究所李宏毅男副教授电路与系统交流调速技术电力电子技术电子科学与技术研究所李晶皎女教授计算机科学与技术、电路与系统、检测技术及自动化装置图像处理技术电子科学与技术研究所李景宏男副教授电路与系统 EDA技术应用集成电路设计数字信号处理及其硬件实现图像处理与识别电子科学与技术研究所刘纪红女副教授电路与系统数字信号处理及其硬件实现智能信息处理 EDA技术应用图像处理与识别电子科学与技术研究所马学文女副教授电路与系统智能控制数字信号检测与处理 EDA技术应用电子技术应用电子科学与技术研究所王旭男教授电路与系统智能化信息检测与处理盲信号分离技术电子科学与技术研究所赵丽红女副教授电路与系统生物特征识别图像处理与识别智能信息处理 EDA技术应用电子信息工程研究所丁山男副教授电工理论与新技术、信号与信息处理可重构计算计算机辅助VLSI设计可重构实时调度理论嵌入式实时操作系统电子信息工程研究所贺立红女副教授电工理论与新技术、信号与信息处理电磁污染与电磁兼容研究故障检测与诊断技术研究脉冲功率技术及其应用医学影像处理技术研究电子信息工程研究所李华女副教授电工理论与新技术、信号与信息处理电路故障诊断方法研究电磁兼容性研究图像压缩技术研究图像配准及融合方法研究电子信息工程研究所李世平男副教授电工理论与新技术、信号与信息处理可再生能源控制技术研究先进工业控制技术研究可编程逻辑器件及应用技术研究大规模集成电路技术研究电子信息工程研究所刘晓志女副教授电工理论与新技术、信号与信息处理电气设备的故障诊断电气传动及控制电力系统动态控制理论与技术信号处理的统计分析方法研究电子信息工程研究所王安娜女教授电工理论与新技术、信号与信息处理电路故障诊断:故障诊断算法、基于PC机及嵌入式系统的故障电力系统故障诊断:故障诊断算法、基于PC机及嵌入式系统的电磁成像:电阻抗及电磁成像技术研究及实现电磁兼容:电磁兼容及抗电磁干扰电子信息工程研究所吴春俐女副教授电工理论与新技术、信号与信息处理电工理论与新技术电磁兼容设计与干扰抑制技术超导电工技术单片机应用电子信息工程研究所吴建华女教授电工理论与新技术、信号与信息处理脉冲功率技术理论与应用研究电能质量控制技术可编程逻辑器件及应用技术电磁兼容技术电子信息工程研究所肖军女副教授电工理论与新技术、信号与信息处理电工理论与新技术电气传动及控制节能新技术信号与信息处理电子信息工程研究所张石男教授电工理论与新技术、信号与信息处理嵌入式系统技术实时信号处理与DSP技术医学影像处理生物医学信号处理东北大学软件中心胡景德男副研究员计算机应用技术东北大学软件中心江根苗男研究员计算机科学与技术医学成像技术、图像处理与人工智能东北大学软件中心江早男教授计算机科学与技术图像处理、数字放送东北大学软件中心李品彦男副教授计算机科学与技术电子商务东北大学软件中心刘春雨男副研究员计算机科学与技术多媒体技术、图像处理与人工智能东北大学软件中心刘积仁男教 授计算机科学与技术分布式多媒体、计算机网络、嵌入式软件东北大学软件中心柳玉辉男副研究员计算机科学与技术图像处理、网络安全技术东北大学软件中心卢朝霞女教 授计算机科学与技术计算机网络安全、数据库理论与计算机集成管理东北大学软件中心温涛男教授计算机科学与技术网络安全、知识管理与知识工程东北大学软件中心杨利男教授计算机科学与技术数据库与多媒体技术、分布式处理技术东北大学软件中心余克清男副研究员计算机科学与技术嵌入式计算机软件开发、计算机工作流系统研究东北大学软件中心袁 淮男副研究员计算机科学与技术工作流系统设计与实现、计算机网络安全东北大学软件中心张 霞女教授计算机科学与技术数据管理系统东北大学软件中心张立东男副教授计算机科学与技术商业智能东北大学软件中心张伟男副教授计算机科学与技术人工智能、计算机网络东北大学软件中心赵 宏男教 授计算机科学与技术分布式多媒体信息系统及多媒体网络技术东北大学软件中心赵大哲女教授计算机科学与技术软件工程学东北大学软件中心郑全录男研究员计算机科学与技术医学成像技术东北大学软件中心邹豪男副教授计算机科学与技术医学成像技术计算机软件与理论研究所鲍玉斌男副教授计算机科学与技术数据库技术计算机软件与理论研究所邓庆绪男副教授计算机科学与技术嵌入式系统计算机软件与理论研究所董晓梅女副教授计算机科学与技术安全及保密的理论与技术计算机软件与理论研究所胡明涵女副教授计算机科学与技术自然语言处理计算机软件与理论研究所林树宽女副教授计算机科学与技术机器学习计算机软件与理论研究所申德荣女教授计算机科学与技术分布式数据库及Web信息管理计算机软件与理论研究所王大玲女教授计算机科学与技术数据挖掘计算机软件与理论研究所王义男教授计算机科学与技术计算机软件与理论研究所杨晓春女副教授计算机科学与技术分布式数据管理与访问控制计算机软件与理论研究所于戈男教授计算机科学与技术数据库理论与技术、嵌入式软件计算机软件与理论研究所张俐女副教授计算机科学与技术自然语言处理计算机软件与理论研究所朱靖波男教授计算机科学与技术自然语言处理计算机系统研究所高福祥男教授计算机科学与技术嵌入式计算机网络计算机网络安全无线传感器网络计算机系统研究所刘辉林男副教授计算机科学与技术信息检索嵌入式计算机技术计算机系统研究所乔建忠男教授计算机科学与技术分布式、并行计算技术分布式、并行操作系统计算机系统研究所史岚女副教授计算机科学与技术计算机网络与信息安全嵌入式计算机技术计算机系统研究所王波涛男教授计算机科学与技术数据流移动计算时空间数据库不确定性计算计算机系统研究所王国仁男教授计算机科学与技术P2P数据管理可视媒体数据管理传感器网络数据管理计算机系统研究所王剑男副教授计算机科学与技术计算机网络嵌入式计算机技术计算机系统研究所夏利女副教授计算机科学与技术下一代网络服务质量移动IPv6计算机系统研究所徐久强男教授计算机科学与技术普适计算与嵌入式系统无线传感器网络计算机体系结构计算机网络计算机系统研究所于亚新女副教授计算机科学与技术跨媒体信息检索数据空间管理XML数据管理数据流计算机系统研究所赵海男教授计算机科学与技术Internet宏观拓扑结构之复杂性嵌入式技术与操作系统传感器网络与数据融合软件拓扑结构中模型驱动型软件测试支撑平台计算机应用技术研究所黄玉基男副教授计算机科学与技术人工智能理论与应用基于事例推理系统研究智能化信息处理方法计算机应用技术研究所马宗民男教授计算机科学与技术Web数据库个性化查询技术本体工程与应用传感器数据管理计算机应用技术研究所王兴伟男教授计算机科学与技术自组织网络基础理论与关键技术认知网络基础理论与关键技术可信网络基础理论与关键技术信息安全基础理论与关键技术计算机应用技术研究所张斌男教授计算机科学与技术服务计算Web信息处理数据挖掘计算机应用技术研究所张锡哲男副教授计算机科学与技术数据挖掘服务计算web智能计算机应用技术研究所赵林亮男教授计算机科学与技术计算机网络智能网络管理智能信息处理计算机应用技术研究所周福才男教授计算机科学与技术网络与信息安全可信计算电子商务基础理论与关键技术混沌分形理论及其应用计算中心常桂然男教授计算机科学与技术网络与协同计算技术网络信息安全技术分布式多媒体系统计算中心高克宁女副教授计算机科学与技术web信息集成计算中心黄卫祖男教授计算机科学与技术知识工程教育技术自然语言处理计算中心吕振辽男副教授计算机科学与技术企业信息化互联网知识挖掘嵌入式计算机系统控制理论与导航技术研究所高立群男教授控制理论与控制工程、导航、制导与控制学科、模式识别复杂系统与智能控制图像识别控制理论与导航技术研究所井元伟男教授控制理论与控制工程、导航、制导与控制学科复杂控制系统研究通信网络系统控制控制理论与导航技术研究所石海彬男副教授控制理论与控制工程、导航、制导与控制学科切换控制网络控制控制理论与导航技术研究所王明顺男副教授控制理论与控制工程、导航、制导与控制学科嵌入式控制系统:微控制器硬件系统设计及软件设计智能控制:智能控制理论在MCU系统中的应用控制理论与导航技术研究所杨光红男教授控制理论与控制工程、导航、制导与控制学科容错控制、故障诊断控制理论与导航技术研究所张嗣瀛男教授控制理论与控制工程、导航、制导与控制学科、模式识别复杂系统与智能控制控制理论与导航技术研究所赵军男教授控制理论与控制工程、导航、制导与控制学科非线性系统切换系统控制理论与导航技术研究所郑艳女副教授控制理论与控制工程、导航、制导与控制学科导航制导研究流程工业综合自动化实验室罗小川男副教授系统工程复杂生产过程运行控制钢铁生产过程动态优化动态优化算法设计与分析化工过程运行优化方法流程工业综合自动化实验室曲蓉霞女副教授系统工程大型系统建模、优化方法及其应用钢铁企业生产过程管理与优化软件工程、系统体系架构与数据库技术ERP、MES系统研发与计划调度模型优化流程工业综合自动化实验室王成恩男教授系统工程知识工程在复杂产品研制中应用多学科设计系统集成技术制造执行系统技术秦皇岛分校白秋果男副教授控制理论与控制工程工程与环境检测技术及智能仪器计算机自动测试技术嵌入式计算机系统秦皇岛分校才书训男教授计算机科学与技术人工智能信息挖掘数据库应用计算机网络秦皇岛分校党群男教授计算机科学与技术网络应用数据库应用信息挖掘秦皇岛分校丁顺利男副教授计算机科学与技术网格计算信息挖掘数据库应用秦皇岛分校顾德英男副教授控制理论与控制工程智能控制理论与应用复杂系统综合自动化过程监测、诊断与安全控制秦皇岛分校郭福田男副教授通信与信息系统无线通信信号处理密码学与信息安全秦皇岛分校贺忠海男副教授测试计量技术及仪器、检测技术与自动化装置计算机层析成像技术多相流检测控制工程与环境检测技术及智能仪器生产过程参数测量与优化控制系秦皇岛分校黄力群男副教授通信与信息系统无线通信信号处理光纤通信秦皇岛分校蒋学英女副教授计算机科学与技术网络应用数据库应用信息挖掘秦皇岛分校金伟男教授测试计量技术及仪器、检测技术与自动化装置生产过程参数测量与优化控制系统工程与环境检测技术及智能仪器计算机层析成像技术多相流检测控制秦皇岛分校李雅珍女副教授通信与信息系统无线通信信号处理密码学与信息安全秦皇岛分校刘杰民男副教授计算机科学与技术网络应用数据库应用信息挖掘秦皇岛分校刘星女副教授计算机科学与技术网络应用数据库应用信息挖掘秦皇岛分校马淑华女副教授控制理论与控制工程智能控制理论与应用复杂系统综合自动化过程监测、诊断与安全控制秦皇岛分校孟庆山男副教授通信与信息系统无线通信信号处理密码学与信息安全秦皇岛分校彭艳东男教授计算机科学与技术无线通信信号处理密码学与信息安全秦皇岛分校齐世清男副教授控制理论与控制工程工程与环境检测技术及智能仪器生产过程参数测量与优化控制系统计算机层析成像技术多相流检测控制秦皇岛分校曲荣欣女副教授计算机科学与技术计算机网络路由体系结构计算机网络安全加密算法分析秦皇岛分校曲秀云女副教授测试计量技术及仪器、检测技术与自动化装置生产过程参数测量与优化控制系统工程与环境检测技术及智能仪器计算机层析成像技术多相流检测控制秦皇岛分校任彦硕男副教授控制理论与控制工程智能控制过程监测诊断控制复杂工业过程自动化秦皇岛分校汪晋宽男教授通信与信息系统、控制理论与控制工程、导航制导与控制新一代高速信息网络关键技术自适应自组织网络结构及关键技术软件无线电技术与应用智能控制理论与应用秦皇岛分校王翠荣女教授计算机科学与技术无线网络信息挖掘数据库应用秦皇岛分校王凤文男副教授通信与信息系统新一代高速信息网络关键技术无线通信系统及关键技术软件无线电技术与应用秦皇岛分校王娟女副教授计算机科学与技术网络应用数据库应用信息挖掘秦皇岛分校王雷震男副教授系统工程制造系统生产与物流运作管理商业与服务系统运作优化与决策复杂系统建模与优化的软计算方法秦皇岛分校吴朝霞女副教授测试计量技术及仪器、检测技术与自动化装置计算机层析成像技术多相流检测控制工程与环境检测技术及智能仪器软测量技术与故障诊断方法研究秦皇岛分校于丁文男教授控制理论与控制工程过程监测诊断控制鲁棒控制非线性系统的建模与控制秦皇岛分校袁静波女副教授计算机科学与技术网络应用数据库应用信息挖掘秦皇岛分校张春宏男副教授计算机科学与技术网络应用数据库应用信息挖掘秦皇岛分校张家生男副教授控制理论与控制工程智能控制非线性系统的建模与控制复杂工业过程自动化秦皇岛分校张金泉男副教授控制理论与控制工程过程监测诊断控制自适应控制通信网络系统控制秦皇岛分校张文志男副教授通信与信息系统无线通信信号处理网络应用秦皇岛分校张瑛女副教授通信与信息系统无线通信信号处理密码学与信息安全秦皇岛分校赵一丁男副教授控制理论与控制工程智能控制理论与应用复杂系统综合自动化过程监测、诊断与安全控制人工智能与机器人研究所陈东岳男副教授模式识别与智能系统生物视觉系统模型研究基于视频信息的智能交通系统视频信息的快速模式识别方法人工智能与机器人研究所崔建江男副教授模式识别与智能系统数字图像处理复杂工业过程建模、仿真与控制计算机仿真技术人工智能与机器人研究所郝培锋男教 授模式识别与智能系统工业过程数学模型研究系统仿真技术人工智能识别与分析技术计算机应用人工智能与机器人研究所佟国峰男副教授模式识别与智能系统足球机器人与教育机器人模式识别与智能机器人移动视场全景重建和虚拟现实技术机器人支撑平台软件与仿真技术人工智能与机器人研究所王斐男副教授模式识别与智能系统模式识别智能控制智能机器人助残康复机器人人工智能与机器人研究所王晓哲女副教授模式识别与智能系统复杂系统的智能控制智能优化方法及应用基于视频的智能交通系统人工智能与机器人研究所魏颖女副教授模式识别与智能系统图像处理与模式识别计算机辅助诊断技术自动检测技术人工智能与机器人研究所吴成东男教 授模式识别与智能系统图像智能处理多源信息融合无线传感器网络建筑智能化技术人工智能与机器人研究所薛定宇男教授模式识别与智能系统分数阶控制理论网络控制理论图形与影像处理控制系统仿真与计算机辅助设计人工智能与机器人研究所赵姝颖女副教授模式识别与智能系统计算机视觉机器人智能人机交互虚拟现实软件学院高晓兴男副教授计算机科学与技术、通信与信息系统计算机网络通信技术通信编码计算机网络安全视音频通讯软件学院姜慧妍女副教授计算机科学与技术智能图像处理模式识别三维成像CAD软件学院朱志良男教授计算机科学与技术、通信与信息系统计算机网络与通信通信与信息系统研究所杜荔女副教授通信与信息系统宽带交换网络中的QoS路由技术智能光网络及光网络生存性流量工程技术通信与信息系统研究所郭磊男副教授通信与信息系统智能光网络网络生存性新一代互联网通信与信息系统研究所季策女副教授通信与信息系统自适应盲信号分离与图像处理信号检测与估值技术的研究及应用嵌入式计算机及其开发技术的研究移动通信系统及关键技术的研究通信与信息系统研究所沙毅男副教授通信与信息系统音视频信号处理嵌入式系统数字信号处理软件无线电通信与信息系统研究所宋清泮女副教授通信与信息系统下一代无线通信网中的QoS保证体系多模终端的的网络选择和垂直切换决策异构无线网络的负载平衡和呼叫准入控制无线移动网的移动性管理通信与信息系统研究所原萍女副教授通信与信息系统无线自组织网络通信服务的研究卫星互联网关键技术研究图像处理算法及其应用研究通信与信息系统研究所张振川男副教授通信与信息系统音视频信号处理与编码无线通信技术与系统智能家居网络系统及技术计算机通信及组网技术物流优化与控制高振男副教授系统工程、物流优化与控制生产计划与控制物流优化优化算法物流优化与控制唐立新男教授系统工程、物流优化与控制流程工业生产计划与调度数学规划计算机生产管理制造执行系统系统工程研究所胡清河男副教授系统工程复杂系统建模与优化项目管理理论与应用电子商务/供应链/物流系统工程研究所黄敏女教授系统工程智能优化与决策方法及其应用物流管理及供应链优化与决策面向全球制造的计划与存储控制的建模与优化系统工程研究所刘士新男教授系统工程项目管理与优化调度工业与服务业物流系统建模与优化生产计划/调度理论与方法制造执行系统系统工程研究所刘树安男副教授系统工程复杂系统的建模与优化的软计算方法系统工程研究所庞哈利男教授系统工程制造系统建模、优化与仿真供应链与物流系统运作决策管理ERP/MES系统设计与开发公共交通系统建模、优化与仿真系统工程研究所唐加福男教授系统工程制造系统供应链与物流运作优化质量管理与质量工程商业与服务系统运作优化决策分析与优化的理论、方法系统工程研究所汪定伟男教授系统工程复杂系统建模与优化智能优化算法生产与服务系统的管理技术弹复性工程与紧急响应。
各校控制理论与控制工程情况
中国空间技术研究院(航天五院 中国空间技术研究院 航天五院... / 航天五院
研究方向 04 计算机控制 年份 招生 人数
专业名称: 专业名称:081101 控制理论与控制工程
导师姓名 考试科目 ①101 政治②201 英语一③301 数学一④901 自动 控制原理 招生类别 普通统招 学历层次 硕士研究生 备注
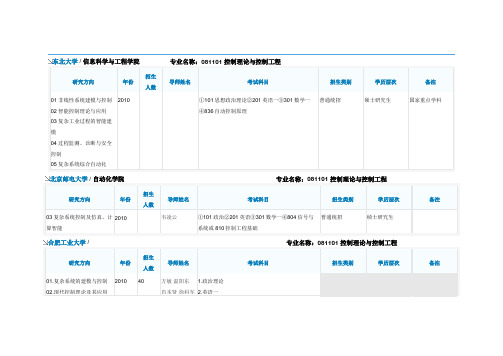
东北大学 / 信息科学与工程学院
研究方向 01 非线性系统建模与控制 02 智能控制理论与应用 03 复杂工业过程的智能建 模 04 过程监测、诊断与安全 控制 05 复杂系统综合自动化 年份 招生 人数
专业名称: 专业名称:081101 控制理论与控制工程
导师姓名 考试科目 ①101 思想政治理论②201 英语一③301 数学一 ④836 自动控制原理 招生类别 普通统招 学历层次 硕士研究生 备注 国家重点学科
专业名称: 专业名称:081101 控制理论与控制工程
导师姓名 考试科目 ①101 思想政治理论②201 英语一③301 数学一 ④814 控制综合基础或 815 智能科学基础 招生类别 普通统招 学历层次 硕士研究生 备注 控制综合基础含: 自控原理、现代控 制论各 1/2;智能 科学基础含:自控 原理、计算机视觉 各 1/2
06 先进系统建模方法与仿真 2010 技术
北京机械工业自动化研究所 /
研究方向 01 工业自动化系统集成 02 物流与仓储自动化 03 工业机器人 年份 招生 人数
专业名称: 专业名称:081101 控制理论与控制工程
导师姓名 考试科目 ①101 政治②201 英语③301 数学一④801 自动控 制原理 招生类别 普通统招 学历层次 硕士研究生 备注 复试科目: 数字、模拟电子 技术基础
53生产全流程多目标动态优化决策与控制一体化理论及应用

(National RFID Centre) Lee Eng Wah教授提出该项目组“提出了一 种改进的差分进化算法,采用嵌入增量机制和实时事件出现时前一差分 进化求解过程的最终种群生成新的初始种群”。原文:"They proposed an improved differential evolution(DE) algorithm by embedding an incremental mechanism to generate a new initial population for the DE whenever a real-time event arises, based on the final population in the last DE solution process代表性论文[2]入选了ESI高被 引论文。
(2)第三方对科学发现2的评价[代表性论文1,2,3]
引文[3]引用了代表性论文[3]。澳大利亚New South Wales大学Ruhul Sarker教授指出该项目组提出的智能优化算法“对28个无约朿 问题算例进行了测试,结果表明它的性能优于最先进的算法”。原文:“Th亡algorithm was tested on 28 unconstrained problems, with the results demonstrated that it was superior to state-of-the-art algorithms"o代表性论文[3]入选了ESI高被引论文。
2019
项目名称
生产全流程多目标动态优化决策与控制一体化理论及应用提源自单位教育部提名意见
(不超过600字)
工业自动化中的智能算法与优化

工业自动化中的智能算法与优化工业自动化是指利用各种自动化设备和技术,对工业生产过程中的各种操作进行自动化控制和管理的系统。
随着科技的不断发展,智能算法的应用在工业自动化中变得越来越重要。
智能算法可以通过学习和优化的方式,提高工业生产的效率、质量和稳定性。
本文将介绍工业自动化中的智能算法及其优化应用。
一、智能算法在工业自动化中的应用1. 人工神经网络(Artificial Neural Network,ANN)人工神经网络是一种模拟人脑神经网络行为的计算模型,其结构由神经元和神经元之间的连接组成。
在工业自动化中,人工神经网络可以通过学习大量的历史数据,实现对生产过程中各种参数的预测和优化控制。
例如,通过训练人工神经网络,可以预测产品的质量和故障发生的概率,提前采取相应的措施。
2. 遗传算法(Genetic Algorithm,GA)遗传算法是一种模拟生物进化过程的优化算法。
它通过对候选解进行自然选择、交叉和变异等操作,以求得最优解。
在工业自动化中,遗传算法可以应用于生产调度、物流优化、机器人路径规划等问题。
例如,在生产调度中,通过遗传算法可以找到最佳的生产顺序和时间分配,以最大化产能和降低生产成本。
3. 模糊逻辑控制(Fuzzy Logic Control,FLC)模糊逻辑控制是一种基于模糊推理的控制方法。
它能够处理不确定和模糊的输入,根据一系列模糊规则进行推理,得出相应的控制输出。
在工业自动化中,模糊逻辑控制常用于处理具有模糊性的输入和输出,如温度、压力和湿度等。
例如,在温度控制系统中,模糊逻辑控制可以根据温度的变化趋势和误差程度,自动调整加热或降温的控制策略,实现温度的稳定控制。
二、智能算法优化工业自动化的应用案例1. 生产线优化通过智能算法进行生产线优化可以提高生产效率和降低生产成本。
例如,利用遗传算法对生产线进行优化调度,可以最大限度地减少生产周期和生产成本,提高生产线的利用率。
同时,通过人工神经网络对生产参数进行预测和优化,可以减少人为干预,提高生产过程的稳定性和一致性。
机械设计制造及自动化专业教学的改革实践

收稿日期:2020-09-29作者简介:杨乐(1986),男,辽宁沈阳人,博士,实验师,研究方向为复杂工业生产全流程智能建模与优化控制。
此文为河北省高等教育教学改革研究与实践项目“光机电一体化的实践教学体系改革研究”(2018GJJG427)的研究成果。
机械设计制造及自动化专业教学的改革实践杨乐(东北大学秦皇岛分校,河北秦皇岛066000)摘要:依据综合实践、实验教学、实习与毕业设计等环节的特点,设计机械设计制造及自动化专业教学改革实践体系。
在综合实践教学方面,加强实践教学内容的设计性、综合性、操作性;在实验教学方面采取开放性与创新性实验教学和自主研制实验设备;在学生实习方面采取构建校企合作实践教学基地方式;在学生毕业设计方面通过监控不同时期毕业设计质量,达到理论、知识与技能的综合运用。
关键词:机械设计制造;自动化专业;教学改革;实践能力;实验教学中图分类号:G642文献标识码:A文章编号:2096-3769(2021)02-089-05一、改革实践教学体系内容机械设计制造及自动化专业主要培养在工业生产第一线从事机电产品设计、制造、技术应用与运行管理等方面的复合型工程技术人才。
在教学理念上,应以知识为基础,能力为重点,将知识与能力教育协调展开。
因此,培养机械设计制造及自动化专业人才的实践能力是重点,须改变传统的教学理念,创新思维,改革实践教学体系。
在教学改革实践中,加强基础理论知识与实践的有机结合[1]。
在教学过程中综合考虑学生在学习方面相关的兴趣爱好,增设实践课程,使学生的创新能力及学习能力得到全方位提升。
在增强学生专业基础理论知识的基础上,为学生增加更多与专业有关的实践机会。
依据综合实践、实验教学、实习与毕业设计等环节的走向,图1的改革实践体系呈现出该专业教学的实践改革模式。
全部教学环节中,该改革体系可使学生的创新精神与实践能力紧密联系,依据“实际、实干、实地、实效”四个方向体现实践改革教学体系优势[2]。
东北大学电气工程及其自动化专业介绍-2013年

电气工程及其自动化专业介绍东北大学信息科学与工程学院二O一三年五月本学科历史与发展历程1875年法国巴黎火车站建成世界上最早的一座火力发电厂,1882年爱迪生建立商业化电厂和直流电力网能发660kw电力,1876-1878年俄国人亚布洛切科夫成功试验了单相交流输电技术。
1880年前后英国费朗蒂改进了改进了交流发电机,并力主采用交流输电。
1882年法国人高兰德和英国人约翰。
吉布斯成功研制了第一台实用变压器,使得交流输电,变压变得得心应手,1885年英国工程师菲尔安基设计的第一座交流单相发电站建成发电发电功率1000kw,电压2500v升压后10kv传输,最后用户供电电压为100v,交流和直流输电在历史上有过很大的争议,但是最终交流输电走上了历史的舞台。
电气工程及其自动化专业是电气信息领域的一门新兴学科,但由于和人们的日常生活以及工业生产密切相关,发展非常迅速,现在也相对比较成熟。
已经成为高新技术产业的重要组成部分,广泛应用于工业、农业、国防等领域,在国民经济中发挥着越来越重要的作用。
电力网理论和控制理论是电气工程及自动化专业的基础,电力电子技术、计算机技术则为其主要技术手段,同时也包含了系统分析、系统设计、系统开发以及系统管理与决策等研究领域。
该专业还有一些特点,就是强弱电结合、电工电子技术相结合、软件与硬件相结合,具有交叉学科的性质,电力、电子、控制、计算机多学科综合,使毕业生具有较强的适应能力,是“宽口径”专业。
我国许多大学设立了本专业,主要实践性教学环节包括电路与电子技术实验、电气工艺实习、金工实习课程设计、生产实习、毕业设计,并为国家培养了许多的这方面人才。
他们已成为本行业的专家学者,分布在我国许多省、市,成为骨干力量。
“文革”期间,由于受政治的影响,全国的高等院校相继停止招生,本专业受到了很大的影响,先是老师被批斗,后来学校根本办不下去了,只能停止招生。
但是,即便如此,许多老师并没有停止研究。
东北大学最优化方法

为了一般地描述函数 f x 在点 x0 处沿 p 方向的变化
情况及变化速度,须引入上升方向和下降方向及方向导数 的概念。
函数 f x 在点 x0 处沿 p 方向的变化反映的是函数 f x在一条直线上的变化,空间中由一点 x0 和一方向 p
所确定的直线方程为
其实,a,b aTb a1, a2,
b1
,
an
b2
。
bn
向量也常用希腊字母 , , , ,, 等表示。
向量内积的性质:
ⅰ) , ,(对称性);
ⅱ) , , , k, k , (线性性);
ⅲ) , 0 ,当且仅当 0 时,, 0(正定性);
向量的长 ,
今考虑一点 B ,不妨取坐标为 x0 0,3T。设想有
一动点从 B 出发沿某个方向移动到了点 M ,其坐标
设为 x0 p ,那么目标函数值将产生如下变化量
f x0 p f x0
假定 p 1 。试问:动点沿哪个方向移动会使
目标函数值有最多的下降或上升?
从图上看,这相当于问:在以点 B 为圆心、以1为半径
定理1.2又表明:只要 f x0 T p 0 ,则 p 方向是 f x
在点 x0 处的上升方向;只要 f x0 T p 0,则 p 方向是
f x 在点 x0 处的下降方向。
函数值升降的快慢则是由方向导数绝对值的大小决 定的。绝对值越大,升或降的速度就越快;绝对值越小, 升或降的速度就越慢。这是因为
2 f x 也称为多元实值函数 f x 的Hesse矩阵。
例1.9 P21
几个特殊的向量值函数的导数公式:
(1)c O ; (2)x I ;
(3) Ax AT ; (4)设 t f x0 tp,其中 f : Rn R1, : R1 R1 。则
东北大学-复杂工业过程的智能检测与先进控制装置

“985工程”流程工业综合自动化科技创新平台学术方向建设《项目指南》(第一批)学术方向:复杂工业过程的智能检测与先进控制装置责任教授:王福利流程工业综合自动化科技创新平台二ΟΟ六年五月二十八日一、研究方向支持的主要领域检测与先进控制资助检测技术与自动化装置、先进控制技术及相关交叉学科领域的基础理论和关键技术研究,主要资助以下研究主题:1)复杂过程建模与优化;2)连铸生产过程参数专用检测技术;3)复杂过程故障检测及诊断;4)多总线系统集成设计理论及应用;5)过程控制器的评估理论及方法;6)不确定性时滞系统的鲁棒故障辨识;7)多智能体控制策略;8)容错控制技术;9)气力输送粉体流动参数可视化监控系统;10)粉尘浓度在线检测技术。
二、研究方向建设的总体目标1)凝炼检测技术与先进控制学术方向,将其建设成为国际先进、国内领先的学术方向;2)形成一支以责任教授为核心、以国家自然科学基金获得者为主要学术骨干、以创新团队为核心的年龄和知识结构合理的基础研究与应用研究相结合的研究队伍;3)取得一批代表性的具有国际先进水平的科研成果;4)申请省级自然科学基金、国家自然科学基金等5项以上;5)在国内一级期刊及国际杂志上发表论文70篇以上,被三大检索收录47篇以上;6)培养博士研究生18名以上,硕士研究生70名以上。
三、建议课题课题1:复杂过程建模与控制1.1、研究目的与意义:系统建模是控制理论研究的一个重要分支,它是控制系统设计的基础。
随着控制过程复杂性的提高,控制理论的应用日益广泛。
神经网络领域取得的研究成果,给非线性系统的建模提供了一定的途径。
目前,基于神经网络的建模方法尚处于探索阶段,这就需要我们做进更深、更广的研究,以使其逐渐趋于完善。
虽然,从理论上来讲,神经网络具有逼进任意非线性函数的能力,但直接将其应用于复杂生产过程的建模还存在许多问题。
因此,本课题组针对复杂过程,针对基于神经网络的各种混合建模方法进行深入研究。
东北大学自动化各方向.doc

(1)081101控制理论与控制工程培养目标:培养从事自动控制理论研究、工程技术领域内各种控制方法与技术研究、控制系统开发与设计、独立担负工程技术工作和管理工作等方面的高级专门人才。
在本学科上掌握坚实的理论基础和系统的专门知识;具有从事科学研究工作或独立担负技术工作的能力。
师资情况:国家级重点学科,1981年建立有全国首批博士点,设有博士后流动站。
现有博士生导师13人,教授22人,学科带头人有科学院院士张嗣瀛教授、工程院院士柴天佑教授等。
主要课程:现代控制理论、系统辨识、智能控制理论与应用、复杂过程控制技术、计算机控制理论与设计、非线性系统控制理论基础等。
毕业生适应范围:适于在高等院校从事自动化相关领域的学术、教学及管理工作;在科研院所从事自动化及计算机相关领域的科研、开发及管理工作;在IT企业从事信息领域的科研、开发及管理工作。
(2)081102 检测技术与自动化装置培养目标:培养具有综合素质,开拓意识,适应市场经济需要的检测技术与自动化装置学科及相关领域的综合型人才:1. 具有坚实的理论基础及系统的专业知识。
2. 能够进行本学科及相关学科的研究和设计开发。
3. 注意培养研究问题和解决问题的能力。
4. 将理论研究与生产实际紧密结合,培养技术研究型人才。
5. 实行目标管理、奖学金制度、学术交流等管理机制,培养研究生的团队精神和管理意识。
对于优秀的硕士研究生,鼓励硕博连读,提前开展博士生课题。
师资情况:本学科具有40余年的历史,隶属自动化一级学科。
现有博士生导师2名,教授2名,副教授10名,讲师3名。
已获国家、省部级奖励10余项,承担科研经费4000余万元,出版教材及学术专著8部,发表论文被三大国际检索机构收录80余篇。
主干课程: 仪表智能化技术、现代检测技术基础、现代过程控制基础、计算机控制理论与设计、数字图像处理、生产过程参数测量与优化控制系统、过程计算机断层成像技术。
毕业生适应范围:可在高等院校、科研院所以及中外企业从事本专业或相关专业的科研、工程技术和教学工作。
智能控制与优化系统的设计与应用
智能控制与优化系统的设计与应用智能控制与优化系统是指通过人工智能、机器学习、优化算法等技术实现的自动化控制、优化过程。
该系统可以应用于许多领域,例如工业制造、交通运输、能源管理等,以提高生产效率、降低成本、减少能源消耗,并为人类社会带来更舒适、更便捷的生活。
一、智能控制系统的设计与应用智能控制系统受到了人工智能技术的推动,其设计方案的完善使其应用领域不断拓展。
智能控制系统通过数据采集、模型建立、算法优化等环节实现自动控制与分析优化,取代了传统的手动控制方式,实现了能耗降低、环保、生产效率提高等目标。
智能控制系统的应用范围包括工业制造、交通运输、智慧城市建设等。
首先,智能控制系统在工业制造领域中的应用非常广泛。
在制造领域中,智能控制系统可以用于自动生产线、自动化加工、智能仓储等环节,提高生产效率,减少人员和设备的成本。
智能控制系统可以结合智能设备如机器人、传感器等,实时进行数据的监控、采集与分析,从而实现设备的自动化控制。
其次,智能控制系统在交通运输领域中也有广泛的应用。
智能交通系统是以智能控制为核心的技术,其主要目标在于提高交通系统的效率,降低交通交通成本,减少交通事故等。
智能交通系统通过采集车辆和路况等数据,分析交通状况,实现车辆的智能控制、智能导航、道路网优化等。
最后,在城市智慧化建设中,智能控制系统在智慧交通、智慧能源、智慧安防等方面的应用也受到了广泛的关注。
以智慧交通为例,智能控制系统可以应用于城市交通信号控制、智慧停车管理、城市公交自动化等方面,优化交通路网,提高交通流量,减少交通事故。
二、智能优化系统的设计与应用除了智能控制系统,智能优化系统也是目前人工智能技术的重要应用之一。
智能优化系统通过一系列的算法优化、数据采集与分析等环节进行建模和处理分析,从而可以实现对各种工程系统的优化。
智能优化系统对于大规模复杂的系统有很大的适用性,例如能源系统优化、网络分配优化、制造过程优化等。
首先,智能优化系统在能源管理领域中有着广泛的应用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
“985工程”流程工业综合自动化科技创新平台学术方向建设《项目指南》(第一批)学术方向复杂工业过程的智能控制与优化责任教授:杨光红流程工业综合自动化科技创新平台二ΟΟ六年五月二十八日一、研究方向支持的主要领域复杂工业过程的智能控制与优化方向将开展复杂系统的多目标优化理论与方法研究,容错控制方法研究以提高容错能力和可靠性,考虑在网络化环境下智能控制与优化的新挑战;以及复杂工业过程控制系统中各层次的智能控制与特殊问题研究。
主要支持以下研究主题:1)容错控制系统的多目标优化设计方法及应用;2)基于模糊模型的非线性鲁棒与智能控制;3)广义系统的鲁棒控制:不确定性广义系统的鲁棒控制理论、以受限机器人系统、电力系统、经济系统、生物系统为背景的控制器设计方法和仿真。
4)切换系统的鲁棒控制、多目标优化设计方法及应用;5)运动目标视觉跟踪技术;6)巡诊查房机器人技术及原型样机;7)网络控制系统:通信网络系统、基于无线传感器网等的控制方法、控制系统优化设计及复杂互联系统协调控制方法。
二、研究方向建设的总体目标本学术方向建设的总体目标是:取得一批原创性强的研究成果,部分成果有重大突破并达到国际领先水平,推动复杂工业过程的智能控制与优化理论的进一步发展,以提高我国在相关学科的整体研究水平。
具体指标:1)在国内外主要学术刊物和重要国际会议上发表60篇以上论文,其中SCI等检索收录论文30篇,包括在本领域著名国际杂志发表论文15篇;2)争取申请成功4项国家自然科学基金,2项省部、市自然科学基金项目;3)培养博士生和硕士生50名(毕业25名以上)。
三、建议课题课题1:容错控制系统的多目标优化设计1.1 研究目的与意义在许多实际工程系统(诸如飞行器控制系统、电力控制系统、网络控制系统等)设计过程中,为了降低由于系统出现故障而带来的损失,通常要求所设计的系统具有可靠性,即所设计的系统要有容错功能。
容错控制控制系统是指所设计的控制器不但能对系统正常运行时提供理想的性能保证,而且在执行器、传感器或元部件发生故障时,仍能使闭环系统是稳定的并具有可接受的特性。
容错控制方法主要分为:主动容错控制与被动容错控制。
主动容错控制是指在故障发生后需要重新调整控制器的参数,也可能需要改变控制器的结构以取得可靠性的目的。
主要分成三大类:1)控制律重新调度;2)控制器重构设计;3)模型跟随重组控制。
其中控制律重新调度与控制器重构设计方法是以有效的故障检测与诊断为基础的,而这对许多实际工程系统而言是非常困难的。
第三类方法,模型跟随重组控制可以避免这一困难,其基本原理是采用模型参考自适应控制的思想,使得被控制过程的输出始终自适应地跟踪参考模型的输出。
但这类方法的缺点是很难优化闭环系统的性能。
被动容错控制方法是指设计一个或多个固定参数的控制器去达到容错目的,其优点是闭环系统的性能可以得到优化,但一般在系统发生故障后,与系统正常运行时相比,被动容错控制系统的性能会有所下降,甚至无法满足实际的需要。
在不使用故障检测与诊断技术的前提下,如何结合被动容错控制方法、模型跟随重组控制方法以及鲁棒自适应控制技术,研究能充分优化闭环系统在不同运行模式下性能的容错控制方法,无疑是非常重要的。
本项目将对这一问题进行深入研究,其结果无论对容错控制理论本身的发展,还是对工程控制系统的应用都具有相当重要的意义。
本项目的研究将对上述容错控制问题,给出有效的容错控制系统多目标优化设计方法,并使得所取得的成果能够应用于实际工程系统。
提出一套能有效计算的数值方法,在理论上能够证明所提出的设计方法能取得比只用被动容错控制方法要好的性能保证;并能通过系统实时仿真来加以验证。
预期目标:1)在国内外主要学术刊物和重要国际会议上发表30篇以上论文,其中SCI等检索收录论文15篇,包括在本领域著名国际杂志发表论文10篇;2)争取申请成功1项国家自然科学基金;3)培养博士生和硕士生20名(毕业10名以上)。
1.2 主要研究内容本项目的主要研究内容包括:1) 针对执行器与传感器故障的情况,研究容错控制系统的优化设计方法。
2) 针对系统含有参数不确定性的情况,研究鲁棒容错控制系统的优化设计方法。
3) 将综合所发展的容错控制器设计方法,能够应用于容错飞行控制系统(诸如F-16模型)的设计,并进行实时仿真研究。
1.3 研究期限:2005年1月1日至2007年12月31日1.4 拟支持经费:50万元课题2:基于高性能模糊模型的非线性鲁棒控制器的研究2.1研究目的与意义本课题的研究目的是以复杂工业过程的建模与控制问题为背景,以模糊集和非线性系统为主要理论,提出一种高性能的模糊建模方法和模糊控制方法,使研究成果达到国际前沿水平,最终形成高控制精度和强鲁棒稳定的控制方法,并力争形成产品。
目前用于模糊控制系统建造的模糊模型结构主要有两类:模糊关系模型和T-S模糊模型。
Cao于1997年提出的动态模糊模型本质上也可以看作T-S模糊模型。
深入研究上述两种模型会发现如下三个缺陷:(1)辨识上述模型时, 必须辨识模糊模型的前提结构。
现有的方法计算烦琐、费时,且难以保证得到全局最优的结构;(2)当基于上述两种模糊模型设计控制器时,通常是对每个模糊子空间的局部模型分别设计控制器,要求所设计的模糊控制规则的模糊前提描述与模型的前提描述完全相同。
但是这将给系统的稳定性、鲁棒性设计和分析带来很大的困难。
(3)上面两类模糊模型还具有共同局限性:其模糊性或不确定性均来自于模糊产生式规则的前提和结论部分的语言描述。
可事实上,操作人员在表达和处理知识和操作经验的过程中,对诸条模糊产生式规则的置信程度(或重要程度)也具有模糊性。
只有稳定的控制系统在工程实际中才有意义,模糊控制系统也不例外。
由于模糊模型是本质非线性时变模型,因此控制系统的稳定性、鲁棒性设计极为困难,难以提出有效的通用方法。
T-S模型因其结构的局部为线性模型,有关稳定性的分析较为完善。
以T. Tanaka为代表的学者曾提出了当控制器的前提与模糊模型的前提完全相同时(不允许有任何偏离)的控制系统稳定性设计方法,得到的是在Lyapunov意义下解矩阵Ricatti 方程的方法,要求存在公共的正定阵P。
很明显对于实际的多变量模糊系统寻找正定阵P是很困难的,有时是无解的。
实质上,此类方法最多只分析了该模糊模型的结论存在未建模偏差时,模糊控制器的鲁棒稳定性设计问题。
但实际上模糊模型的前提部分也存在着未建模偏差,所以前述假设通常难以成立。
因此,这种方法存在着局限性,对于复杂工业过程对象,闭环控制系统的稳定性难以保证。
因此,研究高性能的模糊模型结构、建模方法以及相应的模糊自适应控制器设计方法是十分重要的。
这项研究将推动模糊自适应控制理论和非线性控制理论的深入发展,同时也可以进一步形成具有自主知识产权的高科技产品,解决工业生产过程中非线性系统控制的许多老大难问题,取得可观的经济效益和社会效益,促进我国工业自动化产品的深入发展。
预期目标:1)在国内外主要学术刊物和重要国际会议上发表20篇以上论文,其中SCI等三大检索收录论文10篇;2)争取申请成功2项国家、省部、市自然科学基金;3)培养博士生和硕士生25名(毕业10名以上),培养在职攻读博士学位和博士后的青年教师5名以上。
2.2 主要研究内容1)针对数学模型未知的一类多干扰多变量时变非线性复杂对象,构筑一种先进的多维动态模糊模型──改进的模糊双曲正切模型;2)综合采用粗糙集理论和模糊聚类分析方法辨识其模型,建立反馈控制器。
3)研究小波变换的改进算法,并据此形成新型频域前馈控制方案,解决大时滞和持续的不确定性扰动这两个难点问题;最终形成高控制精度和强鲁棒稳定的控制方法。
2.3 研究期限:2005年1月1日至2007年12月31日2.4 拟支持经费:10万元课题3:广义系统的鲁棒控制理论与应用3.1、研究目的与意义广义系统又称为微分代数系统,历经近30年的研究,取得了许多理论成果,并在航空、航天、机器人、电力系统、电子网络、化工、生物和经济等领域得到了一定的应用。
目前,广义系统的研究仍然是国内外控制界研究的一个热门领域。
广义系统用微分方程和代数方程来表示,描述了一类更为广泛的实际系统模型。
尤其是,广义系统具有正常系统所不具有的脉冲行为,致使有关研究变得复杂而结果富于新颖性。
因此,对于广义系统的研究,具有重要的学术价值和广泛的实际应用背景。
对于广义系统的研究,一些学者考虑导数反馈作用下的广义系统极点配置、脉冲消除和正常化等问题。
在这些工作中,导数项系数矩阵是变化的。
特别是系统动态阶的变化,往往引起系统极点在无穷区间上变化,造成系统稳定性的改变,或者产生新的脉冲行为。
另外,Taniguchi 等人通过实际问题建模,提出了广义T-S模糊系统模型。
这个模型在一定前件变量条件下,是一类导数项系数矩阵为时变的广义系统。
可见,无论是理论上,还是应用上,广义系统中都存在着导数项系数矩阵变化的情况。
同时,导数反馈在广义系统控制中是重要的,也是必不可少的。
有关导数反馈作用下的广义系统结构性质分析与相关控制问题的研究,需要进一步地开展工作,来细致地描述和刻画这类系统的形态和性能。
本项目研究广义系统的分析与控制的新方法,发展导数项系数矩阵具有不确定性的广义系统的鲁棒控制理论,以及混沌控制理论;以受限机器人系统、电力系统、经济系统、生物系统为应用背景,提出相关的控制器设计方法和仿真程。
预期目标:1)在国内外主要学术刊物和重要国际会议上发表30篇以上论文,其中SCI检索收录论文10篇。
2)争取申请成功2项国家、省部、市自然科学基金;3)培养博士生和硕士生25名(毕业10名以上),培养在职攻读博士学位和博士后的青年教师5名以上。
3.2 主要研究内容1)研究在导数反馈作用下,受控广义系统的性质和性能。
细致地刻画系统动态阶的变化和脉冲行为,以及对初始状态的敏感性,分岔、失稳和混沌现象;产生跳跃输入时,系统响应的间断形态;2)探讨导数项系数矩阵具有不确定性时,广义系统结构性质的鲁棒性和混沌想象,以及相关的控制问题,包括鲁棒控制、带有性能指标的优化控制(如H 控制),保成本控制和混沌控制等;3)借助于矩阵不等式方法,以及Matlab软件,求解出对应的控制器,并给出控制器的设计和仿真程序;4)以控制仿真及受限机器人系统、电力系统和生物系统中的实际为背景的应用研究。
3.3 研究期限:2005年1月1日至2007年12月31日3.4 拟支持经费:10万元课题4:切换系统的分析与鲁棒控制4.1 研究目的与意义:切换系统(Switched Systems)是一类重要的混杂系统。
十几年来,切换系统的研究颇受重视。
切换系统有着十分广泛的实际背景,很多实际系统如机器人控制系统、电力系统、交通管理系统、工业控制系统等都不可以简单地用单一的连续模型或离散模型来描述,但却可以用切换系统来描述其动态行为。