视觉方案做ADAS,单目和双目到底有什么差别?
ADAS单目双目三目到底有什么区别?终于有结果了

ADAS单⽬双⽬三⽬到底有什么区别?终于有结果了摄像头的智能化 摄像头在⽇常⽣活中⾮常常见,⼀般⽤来完成拍照、摄像这些基本的功能。
但⾃动驾驶以及⼈⼯智能的到来,使得⼈们有了从摄像头中,获取更为智慧的结果的需求,即通过摄像头的视野,分析感知环境的变化,做出判断,将结果反馈到终端或者云端的处理器当中,服务于更丰富的应⽤。
⾃动驾驶作为最先尝鲜的应⽤领域之⼀,摄像头很早就进⼊了科研专家的考察范围。
业内研究最早同时实⼒最强的,是Mobileye。
这家诞⽣于以⾊列的单⽬视觉公司,有着在汽车⾼级辅助驾驶系统领域12年的研发经验,提供芯⽚搭载系统和计算机视觉算法运⾏ DAS 客户端功能。
公司的产品可实现车道偏离警告 (LDW)、基于雷达视觉融合的车辆探测、前部碰撞警告(FCW)、车距监测 (HMW)、⾏⼈探测、智能前灯控制 (IHC)、交通标志识别 (TSR)、仅视觉⾃适应巡航控制 (ACC) 等功能,产品占据全球市场超过70%的份额。
之所以要花这么⼤的篇幅去介绍Mobileye,是因为他们是业内单⽬摄像头解决⽅案的绝对领导者。
对,没有之⼀,也没有任何含混不清,他们就是NO.1。
这也是为什么芯⽚巨头英特尔愿意花153亿美⾦买下这家在从前名不见经传的⼩公司的原因。
以上的表述中,眼尖的⼈⼀定主要到了⼀个词:单⽬摄像头。
那么什么是单⽬摄像头呢?⽂章开头提到的三⽬摄像头⼜是什么⿁?有没有双⽬的呢?接下来,我将带⼤家⼀⼀解开这⼀困扰我⼀个多⽉的问题。
单⽬摄像头 ⽬前应⽤于⾃动驾驶的路况判断,多以单⽬摄像头⽅案为主。
也就是业界⿐祖Mobileye的看家本领。
但单⽬摄像头有⼀个问题是,在测距的范围和距离⽅⾯,有⼀个不可调和的⽭盾,即摄像头的视⾓越宽,所能探测到精准距离的长度越短,视⾓越窄,探测到的距离越长。
这类似于⼈眼看世界,看的越远的时候,所能覆盖的范围就窄,看的近的时候,则覆盖的范围就⼴⼀些。
⼈眼是双⽬的,在性能上要远优于⼈造产品,但在观察周遭环境的时候,也依然会遇到覆盖不全的问题。
使用「双目摄像头」,中科慧眼打算怎么做ADAS?

使用「双目摄像头」,中科慧眼打算怎么做ADAS?展开全文做ADAS 的创业公司我们报道了很多,但这家叫「中科慧眼」的公司有点不一样,因为他们使用了「双目摄像头」。
目前,国内的ADAS 创业公司基本都是单目摄像头方案。
至于国外厂商,Mobileye 的现款产品也是单目的,但多目摄像头技术已经在研发阶段,博世也有相应的双目摄像头技术。
中科慧眼的 ADAS 项目立项是在 2015 年 6 月,之前也一直在做图像和视频智能处理与分析的工作,团队有 20 人左右。
关于中科慧眼的产品思路和商业逻辑,我们采访了他们的技术总监崔峰博士。
「双目」的两面性双目摄像头测距更像一个数学问题,主要是依靠两个平行布置的摄像头产生的「视差」。
把同一个物体所有的点都找到,依赖精确的三角测距,就能够算出摄像头与前方障碍物距离。
使用这种方案,需要两个摄像头有较高的同步率和采样率,说起来简单,做起来并不容易,特别是对于驾车场景来说。
双目摄像头是他们做ADAS 之初就确定的方案,「双目测距算法」和「实时计算效率」正是中科慧眼的技术优势所在,也已经申请相关专利。
但任何事物都讲究「两面性」,这里的「两面性」,是相对于单目摄像头方案来说的。
首先,来说说双目摄像头方案的优点。
由于单目摄像头方案很大程度上是依靠「图像识别」,也就是把采集到的信息与标定信息进行比对、识别,所以需要依靠大量的数据训练。
在这方面,Mobileye 有十多年的积累,在图像和算法上有得天独厚的优势。
而双目摄像头方案,本质上是对「距离」的探测。
通过双目实时深度计算,可以计算出视野内障碍物每个点到摄像头的距离,然后可以快速划分出障碍物平面。
如此一来,数据训练就显得不是那么重要了(相对于单目来说)。
另外一方面,对于一款后装ADAS 产品来说,安装过程中的「标定」是很重要的。
还是由于双目摄像头的特性,崔峰说他们的产品并不需要复杂的标定过程,只要在生产和安装的时候把摄像头光轴校准,以及确保成像质量和曝光即可。
视觉传感器在智能网联汽车中的应用

• 请说说基于霍夫变换的车道线检测的原理是什么? • 请问什么是基于仿射变换的车道线检测? • 什么是基于边缘点拟合的车道线检测?
• 请说说车道线跟踪的原理是什么?
• 2.语义分割
• 语义分割是指图像处理算法试图从语义 上理解图像中每个像素的角色,该物体 是汽车还是其他分类的物体,除了识别 人、路、车、树等,我们还必须确定每 个物体的边缘,需要使用语义分割模型 来对物体做出像素级的分割,并通过语 义形式提供物体的特征和位置等信息。
20米以外,很难缩小视差的范围。采用高像素摄像 头和较好的算法可以提高测距性能,双目摄像头间 距越小,测距镜头之间的距离越近,探测距离越大 ,镜头间距越大,探测距离越远。
单目视觉传感器的原理和特点
• 智能网联汽车传感系统是一个多传感器的复杂系统。使用单目摄像头是一种很好的方法,但是单目摄像 头依赖大量训练样本、特征提取过程难以观测和调整等。由于传感器的物理特性,摄像头测距精度远低 于激光雷达和多普勒雷达。因此在实际应用中,需要结合激光雷达和多普勒雷达等其他传感器进行探测 ,这些传感器在各自的约束条件下能够发挥各自最优的性能,各类传感器的融合将大大提高目标检测的 精度。
驾驶汽车拥有三个前视摄像头,三个后视摄像头 ,两个侧视摄像头,12个超声波雷达和一个安装 在车身上的前毫米波雷达。
视觉传感器在智能网联汽车中的实际应用
• 智能驾驶汽车的视觉传感器可实现车道偏离警告、前方碰撞预警、行人碰撞预 警、交通标志识别、盲点监控、驾驶人注意力监控、全景停车、停车辅助和车 道保持辅助等功能。
01
• 视觉传感器种类与原理
视觉传感器的基本认识
• 1.车载摄像头的功能
• 请说说智能网联汽车上的摄像头各有什么功能? • 单目传感器的工作原理是先识别后测距,首先通过
《智能网联汽车概论》练习答案

第1章智能网联汽车基础知识练习参考答案一、名词解释1.智能汽车答:智能汽车是在一般汽车上增加雷达和摄像头等先进传感器、控制器、执行器等装置,通过车载环境感知系统和信息终端实现与车、路、人等的信息交换,使车辆具备智能环境感知能力,能够自动分析车辆行驶的安全及危险状态,并使车辆按照人的意愿到达目的地,最终实现替代人来操作的目的。
2.网联汽车答:网联汽车是指基于通信互联建立车与车之间的连接,车与网络中心和智能交通系统等服务中心的连接,甚至是车与住宅、办公室以及一些公共基础设施的连接,也就是可以实现车内网络与车外网络之间的信息交互,全面解决人—车—外部环境之间的信息交流问题。
3.智能网联汽车答:智能网联汽车是指搭载先进的车载传感器、控制器、执行器等装置,并融合现代通信与网络技术,实现车与X(车、路、行人、云端等)智能信息交换、共享,具备复杂环境感知、智能决策、协同控制等功能,可实现车辆“安全、高效、舒适、节能”行驶,并最终可实现替代人来操作的新一代汽车。
4.自动驾驶汽车答:自动驾驶汽车是指汽车至少在某些具有关键安全性的控制功能方面(如转向、油门或制动)无须驾驶员直接操作即可自动完成控制动作的车辆。
自动驾驶汽车一般使用车载传感器、GPS和其他通信设备获得信息,针对安全状况进行决策规划,在某种程度上恰当地实施控制。
5.无人驾驶汽车无人驾驶汽车是通过车载环境感知系统感知道路环境,自动规划和识别行车路线并控制车辆到达预定目标的智能汽车。
它是利用环境感知系统来感知车辆周围环境,并根据感知所获得的道路状况、车辆位置和障碍物信息等,控制车辆的行驶方向和速度,从而使车辆能够安全、可靠地在道路上行驶。
二、填空题1.智能网联汽车发展的终极目标是无人驾驶汽车。
2.自动驾驶汽车至少包括自适应巡航控制系统、车道保持辅助系统、自动制动辅助系统、自动泊车辅助系统,比较高级的车型还应该配备交通拥堵辅助系统。
3.我国把智能网联汽车智能化划分为5个等级,1级为驾驶辅助(DA),2级为部分自动驾驶(PA),3级为有条件自动驾驶(CA),4级为高度自动驾驶(HA),5级为完全自动驾驶(FA)。
双目立体视觉原理
双目立体视觉原理双目立体视觉是人类视觉系统利用双眼获取深度信息的一种视觉方式。
在日常生活中,我们常常利用双眼来感知物体的位置、距离和深度,这得益于双目立体视觉原理的作用。
双目立体视觉原理是指人类通过左右两只眼睛同时观察同一物体,由于左右眼之间存在一定的视差,从而产生了深度信息,使我们能够感知到物体的立体形状和位置。
双目立体视觉原理的实现基于人类双眼之间的视差。
当我们观察远处的物体时,左右眼所看到的图像几乎是一样的,视差较小;而当观察近处的物体时,左右眼所看到的图像会有较大的差异,视差较大。
通过比较左右眼的视差,人类大脑能够计算出物体的距离和深度信息。
双目立体视觉原理在人类视觉系统中扮演着重要的角色。
首先,双目立体视觉使我们能够更准确地感知物体的位置和距离,这对于日常生活中的行走、操纵物体等活动至关重要。
其次,双目立体视觉也为我们提供了更加生动和真实的视觉体验,使我们能够感受到物体的立体形状和空间位置,这对于艺术、设计和娱乐等领域具有重要意义。
在工程应用中,双目立体视觉原理也被广泛应用于计算机视觉、机器人技术等领域。
通过模拟人类双目视觉系统,计算机可以实现对物体的三维重建和深度感知,从而实现对环境的理解和感知。
在机器人领域,双目立体视觉也被用于实现机器人的自主导航、避障和抓取等任务,为机器人赋予了更加灵活和智能的能力。
总的来说,双目立体视觉原理是人类视觉系统中一项重要的功能,它使我们能够感知物体的立体形状和位置,为我们的日常生活、艺术创作和工程应用提供了重要的支持。
随着科学技术的不断发展,双目立体视觉原理也将继续发挥着重要的作用,并为人类带来更加丰富和多彩的视觉体验。
ADAS基础知识

15
传感器 – 超声波雷达
超声波传感器的工作原理是通过送 波器将超声波(振荡频率大于20KHz以 上的声波)向对象物发送,受波器接收 这种反射波,从接收反射波的有无、多 少或从发送超声波到接收反射波所需的 时间与超声波声速的关系,来检测对象
14
酒精闭锁
alcohol interlock(AIL)
在车辆启动前测试驾驶员体内酒精含量,并在酒精含量超标时锁闭车辆动力系统开关。
15
自适应远光灯
adaptive driving beam(ADB)
能够自适应地调整车辆远光灯的投射范围,以减少对前方或对向其它车辆驾驶员的炫目干扰。
16
自适应前照灯
adaptive front light(AFS)
16
转向盲区监测
steering blind spot detection(STBSD)
在车辆转向过程中,实时监测驾驶员转向盲区,并在其盲区内出现其它道路使用者时发出警告信息。
17
后方交通穿行提示
rear crossing traffic alert(RCTA)
在车辆倒车时,实时监测车辆后部横向接近的其它道路使用者, 并在可能发生碰撞危险时发出警告信息。
应用在辅助驾驶领域的毫米波雷达主要有3个频段,分别是24GHz,77GHz和 79GHz。不同频段的毫米波雷达有着不同的性能和成本。
以Audi A8的传感器布局为例,看下不同频段毫米波雷达的功能。 短距离雷达: 24GHz频段 如图所示被标注了橙色框的Corner radar和Rear radar,就是频段在24GHz左右的雷达。 处在该频段上的雷达的检测距离有限,因此常用于 检测近处的障碍物(车辆 )。图中的这4个角雷达,能够实 现的ADAS功能有盲点检测、变道辅助等;在 自动驾驶系统中 常用于感知车辆近处的障碍物,为换道决策提供感知信息。
双目成像原理(一)

双目成像原理(一)双目成像双目成像是计算机视觉领域中常用的一项技术,它模拟了人眼的双目视觉原理,通过两个摄像头拍摄同一物体,从而获得三维信息,实现深度感知和立体显示。
本文将从浅入深地介绍双目成像的相关原理。
单目成像的局限性在讲双目成像前,我们需要先了解一下单目成像的局限性。
单目成像是指使用一台摄像机拍摄同一物体,得到二维图像信息。
单目成像的缺陷在于,它无法获得物体的深度信息,只能得到二维信息,这就限制了它在很多场景下的应用,比如虚拟现实、机器人视觉、自动驾驶等领域。
双目成像原理双目成像是通过两个摄像机同时拍摄同一物体并记录下不同的角度和距离信息,从而得到三维立体信息的一种技术。
它的原理可以简述为:1.两个摄像头同时拍摄同一物体,得到两张图片。
2.将两张图片进行匹配,找出对应的像素。
3.根据两个摄像头之间的距离及像素的匹配关系,确定每个像素在三维空间中的位置。
4.利用三维数据创建虚拟场景,并将其展示在二维屏幕上,实现立体显示。
双目成像的优势相比单目成像,双目成像的优势主要在于:1.获得了物体的深度信息,可以实现深度感知,更加精准地识别物体,提高了识别准确率。
2.三维立体感更强,可以实现真正的立体显示,增加了用户体验。
3.实现立体成像的多种方式,可以根据场景需求自由选择不同方式,提高了适用性。
双目成像的应用双目成像在计算机视觉领域有着广泛的应用,例如:1.智能摄像头:可以通过双目成像技术实现智能分析、目标跟踪和人脸识别等功能。
2.虚拟现实:可以通过双目成像技术实现更加真实的虚拟现实体验,增加用户沉浸感。
3.自动驾驶:可以通过双目成像技术实现精准的障碍物检测和跟踪,提高自动驾驶安全性。
4.机器人视觉:可以通过双目成像技术实现机器人的环境感知和路径规划等功能。
双目成像的不足之处双目成像也有其局限性,主要表现在以下几个方面:1.双目成像需要使用两个相机同时进行拍摄,因此成本较高。
2.双目成像依赖于相机之间的距离和角度,因此在不同的场景下需要对相机进行不同的调整,调整不好会影响成像效果。
单目和双目视觉技术原理
单目和双目视觉技术原理单目和双目视觉技术原理视觉是人类获取信息的最主要的方式之一,而单目和双目视觉技术则是用来模拟人类视觉系统的图像处理技术。
本文将介绍单目和双目视觉技术的原理及应用。
单目视觉技术是指通过一台摄像机获取的单个图像来进行视觉分析和处理的技术。
其原理是通过摄像机获取的图像,利用计算机进行图像处理和分析,从而实现对图像中目标的检测、识别、跟踪等操作。
虽然单目视觉只能提供一个视角的信息,但其广泛应用于机器人导航、目标追踪、图像识别等众多领域。
单目视觉技术的实现主要涉及以下几个关键步骤。
首先,图像采集与预处理。
通过摄像机采集图像后,需要对图像进行去噪、增强等预处理操作,以提高后续处理的效果。
其次,特征提取与描述。
通过对图像进行特征提取,可以将目标的主要信息从图像中提取出来。
常用的特征包括边缘、纹理、颜色等。
在进行特征提取后,需要对特征进行描述,以便进行后续的处理和分析。
最后,目标检测与跟踪。
基于图像特征和描述,可以进行目标的检测和跟踪,实现对目标的自动识别和追踪。
双目视觉技术是指通过两个相距一定的摄像机获取的立体图像来进行视觉分析和处理的技术。
其原理是通过两个摄像机同时获取的左右眼图像,利用计算机进行立体匹配,从而得到立体信息,实现对图像中的深度和距离的估计。
双目视觉技术能够模拟人类的双眼观察,可以提供更加准确的深度信息,因此在三维重建、虚拟现实、自动驾驶等领域具有重要的应用价值。
双目视觉技术的实现主要包括以下几个步骤。
首先,双目摄像机的标定。
由于双目摄像机的位置和焦距等参数可能存在差异,需要进行标定,以保证立体图像的准确性和一致性。
其次,图像的特征匹配与立体匹配。
通过对左右眼图像进行特征提取和匹配,可以得到两个图像之间的对应关系,进而进行立体匹配,得到图像的深度信息。
最后,三维重建与跟踪。
根据立体匹配得到的深度信息,可以对图像进行三维重建和跟踪,实现对目标的三维重构和运动跟踪。
单目和双目视觉技术在各自的应用领域具有广泛的应用前景。
2024 机器视觉单目与双目

2024 机器视觉单目与双目2024年,机器视觉领域的单目和双目技术将继续迎来重要的发展和突破。
单目机器视觉是指利用一台摄像机进行图像捕获和图像处理,可以实现物体检测、识别和跟踪等功能。
双目机器视觉则是指通过两个摄像机来获取场景的深度信息,可以实现3D重建和立体视觉等功能。
在单目机器视觉方面,预计会有更高效和精确的算法被提出和应用。
这些算法可以更好地处理复杂场景下的物体检测和识别任务,提高机器视觉系统的性能和稳定性。
同时,随着硬件的不断升级和性能的提升,单目机器视觉系统的处理速度和实时性将得到显著提升。
双目机器视觉技术方面,预计会有更多的应用场景和实际应用案例涌现。
双目技术可以对场景进行立体重建,使得机器可以更准确地感知和理解周围环境。
例如,在自动驾驶领域,双目机器视觉可以用于实时地感知车辆和行人的位置和距离,从而实现智能驾驶和自动避障等功能。
此外,与机器视觉相关的深度学习技术也将持续发展和应用。
深度学习在图像识别和物体检测等任务上取得了显著成果,可以通过卷积神经网络等方法提取图像中的特征并进行分类和识别。
预计未来会有更多的深度学习模型被应用到机器视觉系统中,提高其性能和功能。
综上所述,2024年机器视觉领域的单目和双目技术将迎来更大的发展和应用。
随着算法和硬件的不断提升,机器视觉系统的性能和功能将进一步提升,为各行业带来更多的应用和创新。
在2024年,随着机器视觉技术的进一步发展,越来越多的行业将受益于其应用。
以下是几个可能的应用领域:1. 工业自动化:机器视觉在工业自动化中的应用将更加广泛。
通过单目或双目机器视觉系统,可以实现对生产线上产品的自动检测和分类,提高生产效率和质量控制。
同时,机器视觉技术也可以用于机器人的视觉导航和操作,使得机器人可以更加灵活和智能地执行各种任务。
2. 医疗诊断:机器视觉在医疗领域的应用将更加重要。
例如,通过分析医学影像,机器视觉可以辅助医生进行癌症早期诊断和病灶检测。
ADAS的“眼睛”很难搞也很关键
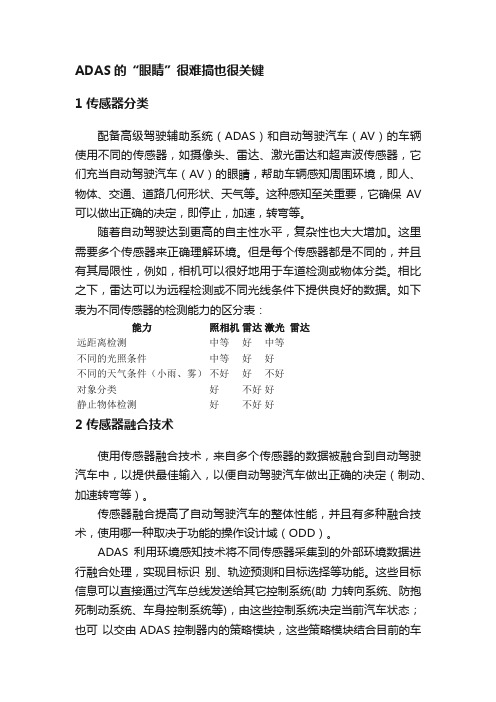
ADAS的“眼睛”很难搞也很关键1 传感器分类配备高级驾驶辅助系统(ADAS)和自动驾驶汽车(AV)的车辆使用不同的传感器,如摄像头、雷达、激光雷达和超声波传感器,它们充当自动驾驶汽车(AV)的眼睛,帮助车辆感知周围环境,即人、物体、交通、道路几何形状、天气等。
这种感知至关重要,它确保AV 可以做出正确的决定,即停止,加速,转弯等。
随着自动驾驶达到更高的自主性水平,复杂性也大大增加。
这里需要多个传感器来正确理解环境。
但是每个传感器都是不同的,并且有其局限性,例如,相机可以很好地用于车道检测或物体分类。
相比之下,雷达可以为远程检测或不同光线条件下提供良好的数据。
如下表为不同传感器的检测能力的区分表:能力照相机雷达激光雷达远距离检测中等好中等不同的光照条件中等好好不同的天气条件(小雨、雾)不好好不好对象分类好不好好静止物体检测好不好好2 传感器融合技术使用传感器融合技术,来自多个传感器的数据被融合到自动驾驶汽车中,以提供最佳输入,以便自动驾驶汽车做出正确的决定(制动、加速转弯等)。
传感器融合提高了自动驾驶汽车的整体性能,并且有多种融合技术,使用哪一种取决于功能的操作设计域(ODD)。
ADAS利用环境感知技术将不同传感器采集到的外部环境数据进行融合处理,实现目标识别、轨迹预测和目标选择等功能。
这些目标信息可以直接通过汽车总线发送给其它控制系统(助力转向系统、防抱死制动系统、车身控制系统等),由这些控制系统决定当前汽车状态;也可以交由ADAS控制器内的策略模块,这些策略模块结合目前的车辆运行状态,计算出减速、加速、增扭、减扭之类的控制命令,最后通过整车通信总线发送给不同的控制系统。
基于开发成本的原因,第二种架构被广泛应用与整车控制系统中。
根据传感器在数据融合中扮演的角色。
融合分为数据级融合、特征级融合和决策级融合。
在数据级融合中,传感器将采集的原始数据直接发送给控制器,控制器对这些数据进行同步、筛选、特征提取、数据聚类、目标轨迹预测、目标识别。
智能网联汽车基础(七)——ADAS激光雷达和视觉系统(上)

(接上期)一、激光雷达1.激光雷达相关定义China SAE标准《智能网联汽车激光雷达点云数据标注要求及方法》对激光雷达、场景、点云等给出一系列的定义和规范。
激光雷达(l g h t d e t e c t i o n a n d ranging):发射激光束并接收回波以获取目标三维信息的系统。
2.激光雷达特点车载激光雷达是目前车载环境感知精度最高的感知方式,探测距离可达300m,精度可控制在厘米级。
激光雷达以激光作为载波,激光是光◆文/江苏 周晓飞智能网联汽车基础(七)——ADAS激光雷达和视觉系统(上)波波段电磁辐射。
具有以下优点:①全天候工作,不受白天和黑夜的光照条件的限制。
②激光束发散角小,能量集中,有更好的分辨率和灵敏度。
③可以获得幅度、频率和相位等信息,可以探测从低速到高速的目标。
④抗干扰能力强,隐蔽性好。
激光不受无线电波干扰。
3.激光雷达类型 车载激光雷达根据其扫描方式的不同,可分为机械激光雷达和固态激光雷达。
机械激光雷达外表上最大的特点就是总成有机械旋转机构(图1)。
固态激光雷达由于无需旋转的机械机构,依靠电子部件来控制激光发射角度,其结构相对简单、体积较小,可安装于车体内。
长远来看微机电系统激光雷达(MEMS)、快闪激光雷达(Flash)等固态激光雷达有望成为重点。
4.激光雷达结构原理激光雷达主要包括激光发射、扫描系统、激光接收和信息处理四大系统,这四个系统相辅相成,形成传感闭环。
一般由光学发射部件、光电接收部件、运动部件和信号处理模块等部件组成。
激光雷达工作原理是向指定区域发射探测信号(激光束),经过目标物反射后,收集反射回来的信号,与发射信号进行处理比较,即可获得待测区域环境和目标物体的有关空间信息,如目标距离、方位角、尺寸、移动速度等参数,从而实现对特定区域的环境和目标进行探测、跟踪和识别。
5.微机电系统激光雷达(MEMS)法雷奥SCALA激光雷达是一款已经应用到量产车上的车规级激光雷达(图2),拥有145°的水平视场角(FOV),可以探测到150m以内的动态或静态障碍物,垂直视场角为3.2°(图3)。
基于SoC的双目视觉ADAS解决方案
基于SoC的双目视觉ADAS解决方案
相比于单目视觉,双目视觉(Stereo Vision)的关键区别在于可以利用双摄像头从不同角度对同一目标成像,从而获取视差信息,推算目标距离。
未来十年,为了完成从感知+预警到决策+执行的进化之路,高级辅助驾驶系统(ADAS)将接入更多的传感器,实现更为复杂的计算,同时具备更高的安全性。
S32V234 采用了4 颗ARM Cortex A53 作为核心CPU,以获得更高的性能功耗比。
另外,S32V234 包含了一颗ARM Cortex M4 来作为片上MCU,主要用于关键IO(如CAN-FD)的实时控制,并支持AutoSAR 操作系统。
芯片集成了两路MIPI-CSI2 和两路16bit 并行相机接口,以及Gbit 以太
网控制器,为双目视觉简介相比于单目视觉,双目视觉(Stereo Vision)的关键区别在于可以利用双摄像头从不同角度对同一目标成像,从而获取视差
信息,推算目标距离。
具体到视觉ADAS 应用来说,如果采用单目摄像头,为了识别行人和车辆等目标,通常需要大规模的数据采集和训练来完成机器学习
算法,并且难以识别不规则物体;而利用毫米波雷达和激光雷达进行测距的精
度虽然较高,但是成本和难度亦较高。
所以,双目视觉的最大优势在于维持开
发成本较低的前提下,实现一定精度的目标识别和测距,完成FCW(前方碰撞预警)等ADAS 功能。
双目视觉测距的基本原理并不复杂,如
根据双目视觉的测距原理,通常将其实现过程分为五个步骤:相机标定,基于S32V234 的双目视觉ADAS 解决方案S32V234 片上具有两路MIPI- CSI2 相机接口,每一路最大可提供6Gbps 的传输速率,可用于左右两路相机的。
智能网联汽车技术课后习题及其参考答案
《智能网联汽车技术》练习题及其参考答案项目一习题及思考题【填空题】1.智能网联汽车集中运用了计算机、现代、信息融合、识别、通信网络及等技术,是一个集环境感知、规划决策和驾驶辅助等于一体的高新技术综合体,拥有相互依存的技术链和产业链体系。
参考答案:传感;模式;自动控制;多等级2. 当两个车辆距离较远或被障碍物遮挡,导致直接无法完成时,两者之间的通信可以通过进行信息传递,构成一个无中心、完全自组织的车载自组织网络,车载自组织网络依靠短距离实现V2V和V2I之间的通信。
它使在一定通信范围内的车辆可以各自的车速、位置等信息和车载感知的数据,并自动连接建立起一个移动的网络,典型的应用包括行驶安全预警、交叉路口协助驾驶、交通信息发布,以及基于通信的车辆控制等。
参考答案:通信;路侧单元;通信技术;相互交换;传感器;纵向3. 控制和执行层控制和执行层的主要功能是按照决策层的指令,对车辆进行和协同控制,并为提供道路交通信息、安全信息、娱乐信息、救援信息,以及办公、网上消费等,保障汽车安全行驶和舒适驾驶。
从功能角度上讲,智能网联汽车与一般汽车相比,主要增加了与定位系统、无线通信系统、车载自组织和先进驾驶等。
参考答案:职能;操作;联网汽车;商务;环境感知;网络系统;辅助系统【问答题】1.简述智能网联汽车的发展历史。
参考答案:智能网联汽车的发展的第一阶段是基于汽车感知与控制的驾驶辅助系统(ADAS),这是智能网联汽车发展的基础阶段;第二阶段是应用信息通信(ICT)技术实现车-X之间的信息共享与控制协同,即网联化技术的应用;第三阶段是自动驾驶和无人驾驶的实现,这是智能汽车发展的最终目标。
基于此,各发达国家早在20 世纪70 年代就开始智能汽车的研究,随着以互联网、通信技术、云计算、人工智能等技术驱动的产业创新和以清洁能源替代化石燃料的能源创新,汽车产业正迎来承接着第四次重大变革的时代——智能网联汽车时代。
2.简述智能网联汽车、智能汽车和无人驾驶汽车的异同点。
智能汽车传感器技术2023

一、选择题1.智能网联汽车的终极目标是()。
A.辅助驾驶汽车B.有条件自动驾驶汽车C.高度自动驾驶汽车D.无人驾驶汽车2. 中美各国将智能网联汽车划为()级。
A.L0~L4B.L1~L3C.L1~L4D.L0~L53、智能网联汽车的聚焦点是在()上,发展重点是提高汽车安全性。
A.行人B.车C.路D.业务平台4. 以下夜间工作能力弱但目标识别能力强的环境感知传感器是()。
A.超声波雷达B.摄像头C.激光雷达D.毫米波雷达5. 车速传感器的电控组件根据()计算汽车的行驶速度。
A.脉冲频率B.脉冲幅值C.脉冲宽度D.脉冲阵列6. 将霍尔元件、永久磁铁和集成芯片封装在一个传感器壳体内的传感器是()。
A.转速传感器B.移动磁场式霍尔传感器C.固定磁场式霍尔传感器D.一体式霍尔传感器7. 凸轮轴位置传感器的工作原理属于()。
A.电磁式转速传感器B.移动磁场式霍尔传感器C.固定磁场式霍尔传感器D.一体式霍尔传感器8. 第三代EA888发动机转速传感器的工作原理是()。
A.电磁式转速传感器B.移动磁场式霍尔传感器C.固定磁场式霍尔传感器D.一体式霍尔传感器9. 可直接测量吸入的空气质量,具有更高的检测精度的空气流量传感器是()。
A.量芯式B.热膜式C.体积流量型D.质量流量型10. 目前在汽车上使用的空气流量传感器几乎都是()。
A.叶片式B.热线式C.热膜式D.卡门涡旋式11. 下面关于过量空气系数λ的描述,正确的是()。
A.大于1,表示浓混合气B.小于1,表示稀混合气C.大于1,表示实际空燃比小于理论空燃比D.小于1,表示浓混合气12. 氧化锆式氧传感器正常输出信号电压时,自身温度是()。
A.100℃B.200℃C.300℃D.350℃13. 氧化锆式氧传感器电压输出特征与()有关。
A.排气压力B.排气温度C.气体中氧含量D.气体中二氧化碳含量14.汽车测距超声波雷达主要使用的频率是()。
A.32kHzB.40kHzC.48kHzD.58kHz15. 毫米波传播时在()频段附近的衰减较小。
ADAS感知算法观察

ADAS感知算法观察ADAS感知算法观察如果把⼀台ADAS车辆⽐作⼀个⼈的话,那么激光雷达、毫⽶波雷达、摄像头、IMU及GPS等等部件就相当于⼈的眼睛、⿐⼦、⽿朵、触觉及第六感等器官或系统。
环境感知作为⽆⼈驾驶的第⼀环节,处于车辆与外界环境信息交互的关键位置,其关键在于使⽆⼈驾驶车辆更好地模拟⼈类驾驶员的感知能⼒,从⽽理解⾃⾝和周边的驾驶态势。
激光雷达、毫⽶波雷达、超声波雷达、定位导航系统、视觉系统等为⽆⼈驾驶车辆提供了海量的周边环境及⾃⾝状态数据,这些以图像、点云等形式呈现的数据包含了⼤量与驾驶活动⽆关的信息。
环境感知需要遵照近⽬标优先、⼤尺度优先、动⽬标优先、差异性优先等原则,采⽤相关感知技术对环境信息进⾏选择性处理。
⼈类驾驶员受限于视野范围,存在诸多驾驶盲区。
⽆⼈驾驶车辆上安装的每类传感器也都有⾃⾝的感知盲区。
实际上,这些区域仅相对于特定时刻⽽⾔,随着车辆的⾏进在下⼀时刻即会产⽣新的盲区。
⽆⼈驾驶过程中,通过组合使⽤多类传感器和运⽤时序关联的感知技术,可以缩⼩感知盲区的范围,⼀般不会影响正常驾驶。
⼀、环境感知功能系统构成⽆⼈驾驶车辆获取和处理环境信息,主要⽤于状态感知和 V2X ⽹联通信。
状态感知主要通过车载传感器对周边及本车环境信息进⾏采集和处理,包括交通状态感知和车⾝状态感知。
V2X ⽹联通信是利⽤融合现代通信与⽹络技术,实现⽆⼈驾驶车辆与外界设施和系统硬件配置⽅案之间的信息共享、互联互通和控制协同。
交通状态感知功能的实现依赖于环境感知传感器及相应的感知技术。
按照获取交通环境信息的途径,可将这些传感器分为两类:1)被动环境传感器,该类传感器⾃⾝不会发射信号,⽽是通过接收外部反射或辐射的信号获取环境信息,主要包括摄像头等视觉传感器和麦克风阵列等听觉传感器;2)主动环境传感器,该类传感器主动向外部环境发射信号进⾏环境感知,主要指激光雷达、毫⽶波雷达和超声波雷达。
车⾝状态感知功能的实现主要基于 GPS(Global Position System,全球定位系统)、北⽃卫星导航系统( BeiDou Navigation Satellite System,BDS)、惯性导航系统(Inertial Navigation System,INS)等设备,旨在获取车辆的⾏驶速度、姿态⽅位等信息,为⽆⼈驾驶车辆的定位和导航提供有效数据。
单目和双目摄像头到底有神马差?

单目和双目摄像头到底有神马差?很多对智能驾驶感兴趣的朋友都知道,无人驾驶的技术可以分为三大模块,感知、认知和控制。
这个顺序其实也正是一项操作进行的顺序,首先需要对环境进行准确的感知,然后对信息进行处理,最后向汽车的控制系统发出指令,实现具体的功能。
对于比无人驾驶更低一些水平的智能驾驶(辅助驾驶、驾驶辅助、自动驾驶)来说,控制不需要完全由机器来完成,尤其是ADAS以下的水平,还是人类来主导驾驶的。
但是感知和认知部分是必须有的,感知的准确是认知的基础。
在感知模块当中,传感器是最重要的硬件。
目前的传感器也有许多种类,除了各种各样的雷达之外(大家比较熟悉的可能是激光雷达、毫米波雷达),摄像头也是必不可少的。
基于计算机视觉技术的车载摄像头能够对环境中的很多物体进行感知,甚至有一部分人认为随着计算机视觉的发展,激光雷达并非是必需品。
目前的智能驾驶领域中,所应用的摄像头主要有单目摄像头和双目摄像头两类。
三目的摄像头目前也在研发当中,但是还没有太大量的使用。
那么单目和双目的区别在哪里呢?是不是双目的就比单目的好?一、车载摄像头的要求这得从智能驾驶摄像头的要求说起。
这一类摄像头的要求,肯定是出于安全考虑。
具体来说有两个方面:看得远,质量高。
这两点都比较好理解。
看得远就相当于提供了更充足的反应时间,直接提升了安全性;而质量高则是为了识别的准确率。
通常来讲,看得远需要长焦距,但焦距增加会导致视角变窄,所以需要综合考虑;质量高则要求成像效果,通常黑白相机效果会好些。
说到底,摄像头的功能核心,就是测距。
二、两种摄像头的区别测距原理上,两种摄像头便完全不同。
单目摄像头需要对目标进行识别,也就是说在测距前先识别障碍物是车、人还是别的什么。
在此基础上再进行测距。
而双目摄像头则更加像人类的双眼,主要通过两幅图像的视差计算来确定距离。
也就是说,双目摄像头不需要知道障碍物是什么,只要通过计算就可以测距。
从这个角度来看,单目摄像头的缺点在于需要大量数据,并且不断更新和维护,而且针对一些特殊地区特殊情况,还需要不断优化。
《智能网联汽车技术概论》课程授课教案

《智能网联汽车技术概论》课程授课教案《智能网联汽车技术概论》课程授课教案2《智能网联汽车技术概论》课程授课教案《智能网联汽车技术概论》课程授课教案min1.车载超声波雷达基础知识汽车雷达可分为超声波雷达、毫米波雷达、激光雷达等。
雷达的原理不同, 其性能特点也有各自的优点, 可用于实现不同的功能。
汽车车载雷达技术源自军工技术, 超声波雷达的工作原理是利用传感器中的超声波发生器产生 40kHz 的超声波, 然后接收探头接汽车车载雷达技术源自军工技术,超声波雷达的工作原理是利用方位。
超声波雷达是汽车最常用的一种传感器, 可以通过接收到反射后作业1、毫米波雷达拆装、标定、检测过程是什么?1.毫米波雷达拆装、标定、检测过程是什么?1、毫米波雷达拆装、标定、检测过程是什么?下次上课时检查课后反思《智能网联汽车技术概论》课程授课教案讲授与讨论内容回顾提问(第一部分 )15min毫米波是指长度为 1~10 毫米的电磁波, 毫米波的频带频率高于射频, 低于可见光和红外线, 相应的频率范围为 30~300GHz。
目前, 毫米波段有 24GHz、60GHz、77GHz、120GHz,其中 24 GHz和 77 GHz 用于汽车。
24GHz 主要用于5-70 米的中、短程检测, 主要用于 BSD、LDW、LKA、LCA、PA, 77GHz 主要用于 100-250米的中、远程检测, 如 ACC、FCW、AEB 等。
要用于 BSD、LDW、LKA.LCA.PA,77GHz 主要用于 100-250米的中、远程检测,如 ACC、FCW、AEB 等。
要用于 BSD、LDW、LKA、LCA、PA,77GHz 主要用于 100-250米的中、远程检测,如 ACC.FCW、AEB 等。
要用于 BSD.LDW、LKA、LCA、PA,77GHz 主要用于 100-250米的中、远程检测,如 ACC、FCW、AEB 等。
要用于BSD、LDW、LKA、LCA、PA,77GHz 主要用于100-250米的中、远程检测,如ACC、FCW、AEB 等。
汽车传感器行业研究:自动驾驶加速渗透,推动市场高速增长精选版

(/中国银河,傅楚雄、王恺)核心观点:自动驾驶加速渗透,推动汽车传感器市场的高速增长。
传感器是自动驾驶的关键,当前主流自动驾驶传感器主要包括毫米波雷达、车载摄像头以及超声波雷达。
2020 年国内 L2 级别自动驾驶的渗透率已近 15%。
车企相继推出具备 L3 功能的自动驾驶车型。
随着自动驾驶等级的提高,对传感器的数量和质量也提出了更高的要求,L2 级自动驾驶传感器数量约为 6 个,L3 约为 13 个,未来 L5 要达到 30 个以上,相应带动汽车传感器市场高速增长。
2016 年,中国汽车传感器行业市场规模已达百亿,预计到 2025 年,市场规模将突破 600 亿元。
车载摄像头发展较为成熟,是应用最广泛的“汽车之眼”。
车载摄像头环境条件更为严苛,也相应具有更高的价值量。
根据 ICVTank 预测,到 2025 年全球车载摄像头行业规模将达 270 亿美元,CAGR 约为 16%,中国车载摄像头行业市场规模将达 230 亿元,CAGR 约为 32%。
车载摄像头镜头方面舜宇光学是全球龙头,联创电子也已开始为头部企业供货;CMOS 传感器方面韦尔股份全球市占率排名第二,未来有望继续提高份额;模组与系统集成方面,海外企业占据主导,国内欧菲光、丘钛科技、德赛西威、华域汽车等企业积极布局,未来有望凭借成本优势占据更大份额。
毫米波雷达具有体积小、性价比高、可全天候工作的特点,是自动驾驶的核心传感器。
从技术发展看,随着技术的成熟以及成本的下降, 77GHz 雷达将逐渐取代 24GHz 雷达成为未来毫米波雷达市场的主流。
预计到 2022 年全球毫米波雷达市场规模将达 160 亿美元,其中短中距毫米波雷达约 84 亿美元,长距毫米波雷达 76 亿美元。
根据OFweek 预测,到 2025 年中国的毫米波雷达市场规模将超过 300 亿元。
目前博世、大陆等海外企业占据的毫米波雷达主要市场份额,2018 年 CR5 达到68%。
自动驾驶系列课两个摄像头挑战激光雷达双目ADAS牛在哪?

自动驾驶系列课两个摄像头挑战激光雷达双目ADAS牛在哪?一堂价值10万美金的ADAS课程;前微软、三星图像处理专家主讲;详解L2级自动驾驶新宠双目视觉。
车东西(公众号:chedongxi)导语:汽车产业经历剧变,自动驾驶浪潮来袭。
是被浪潮吞没,还是屹立于浪潮之巅?如何摘得“人工智能项目之母”桂冠,用智能代替双手掌控车辆?从9月14日起,智东西重磅推出9堂自动驾驶系列课。
9位实战派导师将为大家奉献超过810分钟的系统讲解和深度互动,完成对33个知识点的专业拆解,和你一起建立未来汽车的知识壁垒。
第3课为中科慧眼创始人兼技术总监崔峰带来的《双目摄像头如何改变ADAS系统》。
本课干货摘录如下,一分钟速览核心要点。
在车东西公众号对话框回复“自动驾驶”,获取系列课PPT及音频资料下载。
要点速览1、ADAS行业目前的技术现状按传感器类型划分,ADAS有毫米波雷达、激光雷达、摄像头三种主要的传感器方案。
毫米波雷达探测距离、精度、应对恶劣天气的能力较好,成本适中,但分辨率低,对非金属物体敏感度低,目前是ADAS市场主流。
激光雷达精度非常高,探测距离远,但在雨雾天气下工作困难,且眼下价格昂贵。
摄像头成本很低,信息量丰富,有较强的物体识别功能,但需要训练大量样本,也会受到成像环境的降质影响。
为取长补短,达到成本与安全的均衡,未来自动驾驶会采用多传感器融合的方案。
2、如何用双目摄像头打造ADAS系统双目(多目)摄像头既可以用于感知车外环境,也可以检测车内环境。
在车内,摄像头可以进行驾驶员的疲劳检测与乘客分析等;在车外,双目摄像头主要是用于测距与物体识别。
与单目ADAS不同,双目是利用物体在两枚摄像头中的成像视差来进行测距,输出距离点云表示物体远近。
同时,它又能融合单目摄像头基于深度学习的物体识别能力。
所以双目摄像头的立体视觉既拥有摄像头的成本、识别优势,又具有激光雷达的高精度点云测距优点。
与激光雷达相比,双目立体视觉在满足车规与售价上占据优势,市场售价不到激光雷达1/40;在性能上,双目视觉系统在角分辨率上更占优势,但测距精度与激光雷达仍有差距。
双目单筒夜视仪
双目单筒夜视仪夜视仪作为夜间户外工作的必备品,已经越来越进入人们生活工作中。
在购买望远镜时,大部分人都是购买双筒的望远镜,因为双筒望远镜使用起来更适合人们的双眼观测。
夜视仪也是一个需要人眼观测的设备。
从理论上讲,肯定是双目的夜视仪比单目的夜视仪使用起来更为舒服。
所以在资金够的情况下,是应该购买双目夜视仪的。
但是,与双筒望远镜相比,双目夜视仪在内部构造上会更有学问,我们这里说的是双目单筒夜视仪,而不是双目双筒的,其实双目单筒与双目双筒没多大差别的,都是两只眼睛观看,这样就不会出现重影的现像。
下面就详细给大家介绍,相信会对大家有帮助。
双目夜视仪相对单目夜视仪,具有更好的观测效果和观测距离,并且使用上也更符合人眼的观测。
一、双目单筒夜视仪的基本知识在进入下面介绍主题前,需要介绍一下夜视仪最基本的知识:1、增像管增像管其实就是一个光源电子放大器,增像管是夜视仪最为关键的器件,也是影响夜视仪成本的最为主要的因素。
增像管从原理角度说,可以分为1代,2代,3代甚至4代,理论上代数越高,越清晰2、夜视仪代数和价格之间的关系目前在国内销售的基本上没有4代的夜视仪。
3代的几乎很少,但是市面上有商家把2代+的产品宣传成3代的去销售,价格从2代的价格上升一个阶梯。
所以对于不懂的消费者而言,一定要了解清楚在下手。
在这里我就不讲一代的产品了了,因为一代的产品不能满足较高的工作,只能在一般日常情况下使用。
1代+的夜视仪,双筒一般在5000-8000元。
2代和2代+的夜视仪,单筒价格一般在20000-40000元,双筒一般在30000-60000元。
2代+双目单筒的夜视仪,双目单筒价格一般在30000-50000元3代数码夜视取证仪系统,单筒数码夜视取证仪的价格是在88000元,双筒数码夜视取证仪的价格是在118000元。
在讨论是应该买单目还是双目夜视仪之间,还需要了解双目夜视仪之间的本质差别二、双目单筒夜视仪这种双目夜视仪,在生产设计上,是直接在单目夜视仪结构上进行改造而成,简单的说就是在单目夜视仪的基础上,再前后增加一个目镜生产而成。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
视觉方案做ADAS,单目和双目到底有什么差别?
目前视觉方案做ADAS既有双目也有单目,两者在距离检测上用了不同的技术路线,产品化时也存在各自优缺点,对此作者谈了谈自己的看法。
本文作者姜安,为中科慧眼CTO。
ADAS功能的第一步是感知,也就是观察车辆周边负责的路况环境。
在这个基础上才能做出相应的路径规划和驾驶行为决策。
目前感知所采用的传感器包含各种形式的雷达、单目摄像头、双目摄像头等,或是由这些传感器进行不同组合形成的感知系统,而这些传感器件各有利弊,传感器融合是大势所趋。
在这其中,摄像头不可或缺,可以通过采集前方道路图像,实现车道线障碍物以及行人检测ADAS功能。
关于ADAS摄像头选用有哪些讲究?单双目方案存在哪些差异?在此谈一谈我的看法。
ADAS摄像头成像哪些要求?
根据ADAS检测需要,摄像头在选择时需要具备下面2个特点:
一是要看得足够远。
看的越远就能有更加充裕的时间做出判断和反应,从而避免或者降低事故发生造成的损失。
这类摄像头关注的参数是焦距,焦距越长看的会越远。
但是焦距越长,带来的问题是视角越窄,所以需要折衷考虑。
二是要求高动态。
选用具有高动态范围的黑白相机,可以有效抑制光晕现象,并增强暗处的细节,从而提高成像质量。
另外,彩色图像在镜头表面进行了镀膜,虽然提升了人眼的感知体验,但实际上降低了信噪比或者说信息量。
这对后续的图像处理不利。
根据这些要求,很容易发现目前行业里的一种炒作现象。
很多车上使用的智能硬件多是行车记录仪、云镜等产品,会在原来成像系统的基础上添加ADAS功能,其实只是厂家赚取噱头的方式。
因为行车记录仪的目的是记录车辆周边的状况,看的越清晰越好、越全面越好,即人友好。
这就需要成像系统具有超高的分辨率、超好的色彩还原性、超大的广角镜头,视角增大意。