X-Y两维宽平台大范围精密定位系统结构分析与设计
光电二维定位系统的设计
sch㈣e“dpId p eak-holding ciKnil
”定位信号*处理
终,值化妊理肝,在订敛妊内泣仃物体 卜『,CCD订效k光敏l自】的.值化输出均为尚 电甲,砷j柏物佛时,CCD#¨口光敏Ih】腑一 ff(化输Ⅲ删为低IU平(如嘲7).利川STM32 rl—fn立时描,求川输入捕欹模式埘二一{ff化输 nj进行捡删,!j自:订放像儿。I・检测剖低lUr 时,记录此时这喇个定时器中引数器的堙教, 印棚应的CCD光甚光像兀的位拦,根据前 面所述的定位原理,L}算}}{遮挡物的坐标. 墒过USB接口传朴电脑做定他处理.址终嵌 现定位功能。
time of the CCD
巾IO经过752个周期后需要形成~个宽 脉冲,利用定时器TIM2和外部触发同步可 以实现。将TIM4产生的①TG信号与11M2 的CH2相连,TIM2作为连接到TIM2 触发器(即①TG)的从定时器,11M2
172
引脚(TIM2_CH2配置为输入引脚)的外部
T12FP2
nothing
to
require coveting
s∞剐耶in
the
po觚omg
area,and
Call
positioning卸嘲has
p06itioning
do with its
it takes
advantage in
area
the large pmitioning systems.and It principle is
1引言
二维空间内的定位技术有很多的应用 场合:如触摸屏、靶标的弹着点定位等等。 传统的二维定位主要是利用二维空间传感器 实现的,常见的有电容型或电感型传感器。 这些传感器要求分布在整个二维空间上。对 于大面积的二维空间定位这是一个难题,有
七、柔性铰链微动机构的分析与设计

七、柔性铰链微动机构的分析与设计一. 实验目的1.认识柔性四连杆机构的形貌2.了解柔性铰链工作台的工作原理及应用前景3.掌握柔性铰链的分析与设计方法4.掌握微位移工作台的分析与设计方法二. 柔性铰链微动机构的用途与发展前景由于宇航和航空等技术发展的需要,对实现小范围内偏转的支承,不仅提出了高分辨率的要求,而且对其尺寸和体积提出了微型化的要求。
人们在经过对各类型的弹性支承的实验探索后,才逐步开发出体积小无机械摩擦、无间隙的柔性铰链。
随后,柔性铰链立即被广泛地用于陀螺仪、加速度计、精密天平、导弹控制喷嘴形波导管天线等仪器仪表中,并获得了前所未有的高精度和稳定性。
如日本工业技术院计量研究所,利用柔性铰链原理研制的角度微调装置,在3分的角度范围内,达到了1000万分之一度的稳定分辨率。
近年来,柔性铰链又在精密位移工作台中得到了实用。
柔性铰链微位移机构具有较高的位移分辨率,再配合压电陶瓷驱动器可实现微小位移,可适合各种介质环境工作。
微位移技术直接影响到微电子技术等高精度工业的发展,如微电子技术随着集成度的提高,线条越来越微细化,与之相对应的工艺设备:光刻机、电子束和x射线曝光机等,其定位精度要求为线宽的1/3~1/5,即亚微米甚至纳米级的精度,这就要求精密工作台具备相应的技术水准,柔性铰链是关键技术之一。
三. 柔性铰链工作台的结构a) 单柔性四连杆b) 双柔性四连杆图7-1 单、双柔性四杆机构变形原理图为保证位移方向的直线性,柔性工作台一般由平行四杆结构的铰链组成。
单柔性平行四杆机构沿一个移动方向产生位移时,在其垂直方向同时产生一个交叉耦合位移,参见图一中的Δ,且随柔性铰链弯曲偏转角的增大而增加,而双柔性平行四杆机构(图7-1b),由于结构对称,当沿一个方向受力产生位移时,两侧铰链均产生交叉耦合位移。
即:如果加工完全对称,双柔性平行四杆机构能产生严格的直线运动,从原理上克服了单柔性平行四杆机构易产生交叉耦合位移的缺陷,是超精密定位系统的首选结构,双柔性工作台结构参见图7-2。
地震地质2020年第42卷总目次

第42卷第6期地震地质Vol.42,No.6 2°20年12月SEISMOLOGY AND GEOLOGY Dec-2020地震地质2020年第42卷总目次第1期研究论文新疆巴里坤1842年和1914年2次M7%历史地震地表破裂的几何展布及特征...............................................................................徐良鑫冉勇康梁明剑等(1)青海都兰热水-桃斯托河断裂的新发现及构造意义...........................李智敏任治坤刘金瑞等(4)喜马拉雅东构造结主要断裂的地震矩亏损与危险性评估.....................田镇杨志强王师迪(33)合肥盆地中郯庐断裂带西支乌云山-合肥断裂最新活动特征...............郑颖平杨晓平疏鹏等(50)宜昌砾石层石英Ti-Li心ESR年龄及其对三峡贯通时限的指示............魏传义刘春茹李长安等(65)基于ALOS PALSAR影像的莫勒切河洪积扇地貌面定量分期...............苏强任俊杰梁欧博等(79)基于GPS观测的张家口-渤海断裂带活动性......................................陈阜超郭良迁郑智江(95)地表破裂的几何结构与同震位移的相关性......................................郝海健何宏林魏占玉(149)2008年汶川地震诱发滑坡灾害在映秀地区的演化特征...........................兰剑陈晓利(125)重庆地区地壳各向异性及其构造启示........................................高见杨宜海黄世源等(147)利用地貌形态估算西秦岭-松潘构造结及邻区的下地壳黏滞系数.............魏聪敏葛伟鹏张波(43)东昆仑断裂带东端和2012年九寨沟7O级地震区深部电性结构探测……孙翔宇詹艳赵凌强等(122)花岗质岩石在脆塑性转化域的变形机制...................................................党嘉祥周永胜(48)含石量和坡度变化对土石混合堆积体的动力响应及失稳的影响..........韩培锋樊晓一田述军等(212)基于海域地震资料的多次波及其鬼波的时距解释...........................支明郝重涛姚陈等(226)第2期序言...........................................................................................................张培震(I)活动地块假说理论框架的提出、发展及未来需关注的科学问题.............郑文俊王庆良袁道阳等(245)中国大陆活动地块边界带的地震活动特征研究综述........................邵志刚冯蔚王秡等(271)GNSS空间大地测量技术在中国大陆活动地块划分中的应用和研究进展...............郝明王庆良(283)青藏地块区大地震迁移规律与未来主体活动区探讨........................袁道阳冯建刚郑文俊等(297)基于GPS观测的鄂尔多斯地块及其周缘现今的运动学特征...............李长军柴旭超甘卫军等(316)利用Envisat ASAR数据探讨渭河盆地断层现今的滑动速率..................陈健龙张冬丽周宇(333)基于地震活动特征的鄂尔多斯西缘现今构造变形模式的限定.............詹慧丽张冬丽何骁慧等(346)基于高精度LiDAR数据的断裂活动习性精细定量——以香山-天景山断裂景泰小红山段为例.............................唐清郑文俊石霖等(366)华山山前正断层的分段活动特征一一来自河流地貌参数的约束..........王一舟郑德文张会平等(382)阳高-天镇断裂晚第四纪活动特征及滑动速率................................罗全星李传友任光雪等(399)京津地区顺义一塘沽高分辨地震折射剖面的走时成像结果及其揭示的上地壳断裂构造特征...............................................田晓峰熊伟王夫运等(414)阿尔金断裂中段南月牙山古地震地表破裂带及其构造意义...............邵延秀袁道阳刘静等(435)甘肃北山南缘俄博庙断裂的新活动特征及活动速率........................张波何文贵刘炳旭等(455)青藏高原东北部龙首山晚新生代剥露历史:来自磷灰石(U-Th)/He的证据...............................................................................李佳昱郑文俊王伟涛等(472)2017年8月8日四川九寨沟M7.0地震及其余震序列的震源参数..........吴微微魏娅玲龙锋等(492)1526地震地质42卷鲜水河断裂带雅拉河段晚第四纪活动性......................................梁明剑陈立春冉勇康等(513)川滇地区主要断裂带上的库仑应力变化及其对地震危险性的指示.......李玉江石富强张辉等(526)第3期2019年四川长宁6.0级地震主震及中强余震(M戸4.0)的震源机制及其应力场...............................................................................梁姗姗徐志国盛书中等(547)利用小震分布和区域应力场确定龙滩库区地震断层面参数..................阎春恒周斌李莎等(562)深地震反射剖面揭示的华北地块南缘地壳的精细结构........................酆少英刘保金李倩等(551)新疆天山中段的震源机制解与构造应力场特征分析.............................张志斌赵晓成任林(595)由km尺度的跨断层基线测量断层近场运动与变形——川滇块体东边界2个场地的初步实验................................曹建玲张晶闻学泽等(612)利用刃VSR方法研究广州地区的场地效应及估算地震灾害特征...............宗健业孙新蕾张鹏(628)琼东北马鞍岭-雷虎岭火山区深部岩浆系统大地电磁三维探测.............孙翔宇詹艳赵国泽等(640)高阶交错网格和PML吸收边界在横向各向同性介质地震波场模拟中的应用..........陈洁朱守彪(654)活动褶皱地区横向河演化与风口形成的研究进展和案例分析...............曹喜林耿豪鹏潘保田等(670)夏垫断裂荣家堡探槽揭示的断裂活动特征及未来地震危险性概率评价……余中元潘华沈军等(68)青海达日断裂中段晚第四纪活动性与947年M7%地震地表破裂带再研究...............................................................................梁明剑杨耀杜方等(703)岩石加载变形过程中超声尾波与声发射变化的实验...........................杨海明陈顺云刘培洵等(015)2种基于Matlab平台的断层位移测量软件对比分析—以阿尔金断裂东段为例.................................................康文君徐锡伟于贵华等(732)—基于模板匹配的地震应急制图方法..............................................徐敬海周海军聂高众等(748)防震减灾公共服务现状与需求全国公众调查结果分析.....................董丽娜连尉平陈为涛等(762)第4期研究论文北天山博罗可努-阿齐克库都克断裂精河段的古地震事件..................胡宗凯杨晓平杨海波等(773)北天山前陆盆地前缘西湖背斜带第四纪褶皱作用...........................王浩然陈杰李涛等(791)河套盆地第四纪晚期不整合面的时代厘定及其构造意义讨论.............白鸾羲徐锡伟罗浩等()6)郯庐断裂带新沂段地壳浅部结构和断裂活动性探测........................顾勤平许汉刚晏云翔等(825)利用面波频散和接收函数联合反演中国境内天山及邻区的地壳上地幔速度结构...............................................................................孔祥艳吴建平房立华等(844)用浅层人工地震方法探测唐山一河间一磁县地震构造带内的活动断裂……王继高战武刘芳晓等(26)云南通海2018年8月地震序列重定位及震源机制.............................李通郭志高星(41)利用浅层地震反射剖面探测研究大兴断裂北段新近纪一第四纪的构造特征...............................................................................何付兵徐锡伟何振军等(893)郯庐断裂带南段对近地表大地电流的分异性..............................................章鑫杜学彬(909)呼图壁M4.2地震前后重力变化特征分析--------------------------------------隗寿春祝意青赵云峰等(923)重庆小南海滑坡原始地形恢复及滑坡体体积计算---------------------------周鑫周庆高帅坡等(936)p m级形貌测量系统--------种新型的断层面微观形貌测量技术.............郝海健魏占玉何宏林等(955)利用居民地建筑物数据和高分遥感影像评估地震烈度的方法初探.......郭建兴张宇翔姬建中等(968)阿尔金断裂带中段现代沉积物样品钾长石红外激发后红外释光的残留信号——对年轻古地震事件测年的指示意义...................................覃金堂陈杰李涛(981)中国海域及邻区统一地震目录及其完整性分析.............................谢卓娟李山有吕悦军等(993)6期地震地质2020年第42卷总目次1527第5期研究论文鲜水河断裂带折多塘断裂西北段全新世活动的地质地貌依据.............马骏周本刚王明明等(1025)秋里塔格褶皱带东段探槽的古地震事件......................................张玲杨晓平李胜强等(1039)东天山唐巴勒-塔斯墩断裂带晚第四纪活动特征...........................黄帅堂胡伟华杨攀新等(1058)金沙江中游永胜昔格达层软沉积变形构造...................................王莅斌尹功明袁仁茂等(1072)2015年5月5日西藏米林M6.9地震对后续地震的静态库伦应力的影响……李振月万永革靳志同等(1091)长江断裂带安徽段上地壳速度结构及基底特征.............................邓晓果田晓峰杨卓欣等(109)郯庐断裂带中南段及邻区Rayleigh波相速度与方位各向异性.............顾勤平康清清张鹏等(129)广东阳江地区的地壳速度结构与地震活动性................................王小娜邓志辉叶秀薇等(153)横向不均匀性对视电阻率各向异性变化的影响和地震前电阻率的变化深度..........解滔卢军(1H2)山东庙岛群岛地区P波三维速度结构反演与2017年震群的发震构造分析...............................................................................李霞陈时军张正帅等(1H8)岷县漳县强震前的跨断层短临异常及亚失稳状态特征.....................张希贾鹏刘峡等(1205)地震动的空间相关性一一以纳帕地震为例...................................陈鲲俞言祥高孟潭等(1218)蒙脱石的弹性性质实验.......................................................................张明洋杨晓松(1229)新技术应用近景摄影测量在探槽地质信息获取中的应用——以泾阳南塬庙店4#滑坡为例........................................魏勇许强董秀军等(1240)利用分布式光纤声波传感器监测大容量气枪震源信号.....................李孝宾宋政宏杨军等(255)第6期研究论文普通角闪石的速率依赖性及其对俯冲带慢滑移机制的启示基于三维大地电磁AR-QN反演的长白山天池火山区电性结构2013年芦山地震同震地磁变化分析刘洋何昌荣(1267)阮帅汤吉董泽义等(1282)宋成科张海洋(101)利用孔壁竖向裂缝方位数据分析沂沭断裂带的地应力场特征.............王璞王成虎用微动台阵记录联合反演场地浅层速度结构一一以唐山响卩堂台3#场地为例...............................................................................王继鑫荣棉水青藏高原东北缘老虎山断裂的断层面参数拟合及其几何意义.............刘白云尹志文珠江三角洲西缘西江断裂鹤山一磨刀门段的活动性........................卢帮华王萍柴达木盆地北缘断裂(锡铁山段)的构造地貌特征与晚第四纪活动速率…姚生海盖海龙基于Sentinel-1A的新疆阿克陶MQ.7地震同震形变与滑动分布特征……温少妍单新建2019年1月1日印尼马鲁古海7O级地震的震源机制及海啸数值模拟......徐志国王君成长岛地区小地震断层面参数拟合及应力场特征.............................崔华伟郑建常王洪等(11)符力耘等(135)袁道阳等(154)王慧颖等(170)殷翔等(185)张迎峰等(101)王宗辰等(11)张正帅等(132)参与式渭南地震情景构建:中国地震风险对策的行动研究示范苏桂武Janise Rodgers田青等(146)新技术应用四川长宁Ms6.0地震震源干涉成像定位赵博高原刘杰等(174)地貌参数方法在小尺度地貌研究中的应用一-一以北天山独山子背斜为例…周朝何宏林魏占玉等(192)基于偏度的地震热红外异常提取刘文宝孟庆岩张继超等(109)地震地质2020年第42卷总目次(125)1528地震地质42卷SEISMOLOGY AND GEOLOGY,VOL.40,2220CONTENTSResearch paper No.1Geemetric distri-utioo and characteristics of the surface rupture of two historicat eerthquakes i-the Barkol Basis, Xinjiann..............................................................XU Liann-xic,RAN Yonn-kann,LISNG Ming-jian,et al.(1) New discoverf of ResUui-Taostuo Rivet Fnuli in Dulan,Qinghai Province and itr iDplicetioos..............................................................................................................LS Zhi-min,REN Zhi-Tuu,LIS JinTui,et al.(18) Moment deficits cm the major faultr and earthquane hazark assessment in the eesteru Himalnyan syntnxis ...............................................................................................................TIAN Zhee,YANG Zhi-xiang,WANG ShiTi(33) Study oo the latest activith of Wuyunshan-Hefei Fault in Hefei Basin,the westeru branch of the Tantu fault zooe ...........................................................................................ZHENG YD ct D c,YANG Xiao-pinn,SHU Peeg ,et al.(50) Chronolovn of Yichann gravel layer basee oo quartz Ti-LiESR dating and its impUcaWons for the incision timing of the Three Gorges vallen..........................WES Chuan-pi,LIS Chuu-ru,LS Chann-An,et al.(65/ Quuntitative mappinn of the MoUqie River alluviat fan morpholooie uuitr in China based oo ALOS PALSAR data ..............................................................................................................SU Qiang,REN Juu-jic,LISNG OuTo,et al.(79) Reseerch oo activith of ZhangjianouTohai fault zone baser oo GPS onservations................................................................................................CHEN FuThav,GUO Liang-pian,ZHENG Zhi-Dng(95) The cerrelatiou between geometric feature of ce-reismie rupture and ce-seismie displacement.......................................................................................................................HAO Hai-jian,HE HongTin,WES ZhtTuClOg) Evelutiou characteristics of landslinee triggeren by2008M s8.()Wenchuan earthquaUe in Yingxin area N Jian,CHEN XiaoTi(145) Crustat80501x(^and its WcWuie iDpUcaWous in the Chougqing reaiou.....................................................................................................GAO Jiao,YANG Yi-Pai,HUANG Shi-pnan,et a.(147) Eshmatinn the lowec crustat viscosity of the westeru Qinling-Pougpan tectonic nohe and its anjacent are o s by u-sinn landform morpholovn.........................................................WES Coug-min,GE Wei-peen,ZHANG Bo(163) Electricat structure of the2017M$7.0JiuzOai-ou earthquaUe reoiou and the eesteru terminus of the east Kuulun Fnua…………………………………………SUN Xnnngpnu ZHAN Ynn ZHAO Lnngpqnnng e a.((182 Deforma0ou mechanism of grauUie rochs in brittle-plastie Wausi0ou zouo..................................................................................................................................DANG Jia-xiaug,ZHOU Youg-shenn(118) Study oo dynamih respouse and instaUilitu of soil-roch mixture deposit with differet stouo couWeW and slope graUientr........................................................................HAN Pei-fenn,FAN Xiao-ni,TIAN Shu-jue,et al.(212) Research ou tiDo-Xistance inWrpreta0ou of multiples and ghostr basea ou marine seismit data..........................................................................................................ZHS Minn,HAO Choun-tav,YAO Chea,et al.(226)No.2The coucepZ,review at new insightr of the active-toctouie bloch hypothesis............................................................................ZHENG Weapuu,WANG Qing-liann,YUAN Dao-ppun,et a.(245) A studp review oo characteristics of seismit activitu of active-toctouie bloch boundaries in mainland China.....................................................................................................SHAO Zhi-pann,FENG Wei,WANG Pean,et a.(271)6期地震地质2022年第42卷总目次1529Progress in application of GNSS to division of active tectonic blocks in continental China............................................................................................................................................HAO Ming,WANG Qina-liaaa(283) Mioration of lares earthquakes in TiOetaa block ares ant dissccssion on major active recion in the future .................................................................................YUAN Dao-yapa,FENG Jiaa-gaa-,ZHENG Wen-jua,et al.(227) Present-day Sinematicc of the O t O os bock and its scrroundin-areas from GPS onservetions................................................................................................LI Zhaasdun,CHAI Xs-ckao,GAN Wei-jun,et al.(316) Estimatinn preseni slip rate of the faults in the Weihe sraaen using Envisat ASAR data..............................................................................................................CHEN Jiaa-lonn,ZHANG Don-di,ZHOU Yu(333) Limitation of current tectonic deformation moUes in the westera margin of OrOos based on seismic activity characi teristicc.......................................................................ZHAN Huidi,ZHANG Donndi,HE Xiao-hui,et al.(346) Qusatitative study of fault acUvPh baseS on hish-precision airOoroe LiSAR data:A case of Xiaohonashap Fault in Xiapesaap-Tiapjinesaap faiUt zons............................TANG Qinn,ZHENG Wen-jun,SHI Lin,et a.(366) Activity characteristics of the Huashaa pienmont normat fault:Insishts from Uuviat seomorphia parametere .................................................................................WANG Yi-zOou,ZHENG De-pen,ZHANG Hui-pinn,et a.(342) The Late Quuteroaro activita features aad slip rate of the Yauesao-Tiauzhen F cu U...........................................................................................LUO Quuu-xins,LI Chuaupou,REN Guaunpue,et a.(399) Uppev crustat velocith structure and ccnstrainine fault interpretation from Shunoi-Tauesu refraction experimen-data.................................................................................TIAN XiaoPene,XIONG Wei,WANG Fupon,et a/.(414) The paleoseismic suPace rupture at south of centrat Altyo Tagh Fault aud its tectonic impUcation ......................................................................................SHAO Yau-pin,YUAN Dao-poue,LIO-dENG Jinn,et a.(435) New activita characteristics aud slip rate of the Ebomiao Fault in the southera margin of Beishau,Gause卩^-...........................................................................................ZHANG Bo,HE Wen-pu-,LIO Binn-du,et a.(455) The northwarp growth of the northeastero TiSetau Plateau in Late Cenozoic:ImpUcaPons from apatite(U-Th)/He res of Loneshou Shau...............................................LI Jis-yo,ZHENG Wen-jun,WANG Wei-tao,et al.(472) Study on source parametere of the8August2017M40Jiuzhaisou earthquaUe aud its aftershocks,northere SS ckuvu......................................................................................WU Wei-pe-,WEI Ya-lino,LONG Fen-,et a.(492) Late-Quateroarp activita of the Yalahe Fault of the Xiaushuihe fault zone,easteru margin of the TiSet Plateau ......................................................................................LIANG Mina-jiau,CHEN Li-ckua,RAN Yonh-Paua,et a.(513) Coulomb stress chauae on active faults in Sickuau-Yunaau region aud its impUcations for seismit hazarp ..........................................................................................................LI Yu-jiaua,SHI Fu-piauh,ZHANG Hui,et al.(526)No.3Focat mechauism solutions aud stress fielO of the2019Chauanma,Sichuau maiashock and its monerate-strona afteohocSs(MS工厶.。
直线电机驱动二维精密定位平台的设计研究

基金项 目: 榆林学 院高层次人 才科 研启动基金项 目( 8 K 3 ) 0 G 0 7 作者简 介 : 曹卫锋 (97 ) 男 , 17一 , 陕西 武功人 , 助教 , 在读博 士 , 研究 方 向: 机械设计与制造 的教学 与研 究。
1
Eq i me t u p n Ma ua tig T c n lg . 2 1 n fc r e h oo y No9, 0 2 n
T ANG h - i g , AO Hu - a g , S u yn C i f n MA o q n W ANG e g’ Ru - u , Fn
( . ae t x m n t nC o eai etr f h aet fc B in 0 10C ia 1 P tn E a iai op rt nC ne e t i e ig10 9 ,hn ; o o o T P n O e, j 2 N c a dR da o a t C nr, e ig1 0 8 C ia . ul r n ait nS f y e t B in 0 0 2,hn ) e a i e e j
二维定位平 台总体设计结合 了大范 围超精密定 位系统的技术指标 , 其技术要求如下 : 自由度 : 、 x Y两维 ;
图 1 二 维定 位 平 台 结 构 简 图
在台子 的侧面上 。
收 稿 日期 :0 2 0 - 8 2 1- 6 0 -
重复计算 电机峰值 力和平均连续输 出力 ,校核被选
1 二维定 位平 台的设计
11 总体 设计 .
11. 、7底座导 轨 2上 台 3上 台 电极 动子 4上台输 出部分 5下 台直 . . . . 线 电机 磁轨 6 台光 栅读数头 7下台直线 电机 动子 8 . 上 . . 限位装 机械 置 9 台光栅支架 1 、5 台导 轨 l. . 上 O 1. 上 1 下台光栅支架 1. 台直线 2 上 电机 l . 3 上台光栅读数头 l . 台机械限位 1. 4 上 6 底座
大学生科研项目课题
大学生科研项目申报辅导员推荐课题
1.多自由度平面机构的设计与性能分析
2.空间机构的综合与三维设计
3.齿轮、凸轮与多杆机构综合与三维设计
4.自动洗瓶机构的三维设计(啤酒瓶、奶瓶等)
5.垃圾自动分类机构设计
6.水面垃圾收集装置设计
7.残疾人自动翻书机构设计
8.盲人行走导航机构设计
9.残疾人体育训练装置设计
10.机械产品回收再利用模式研究
11.典型材料的摩擦、磨损特性研究
12.微量磨损测量技术研究
13.滚动轴承参数化三维设计软件开发
14.齿轮参数化三维设计三维设计软件开发
15.滑动轴承油膜特性测量技术
16.滚动轴承在和分布规律测量技术
17.控制工程模型三维动画设计
18.液压原理模型三维动画设计
19.数控编程加工三维动画设计
20.机械加工在线测量方法研究
21.反馈控制技术应用研究
22.误差补偿在数控加工中的应用研究
有兴趣的同学可选择一个项目申报。
国家自然科学基金委员会关于发布精密测量物理重大研究计划项目指南的通告-

国家自然科学基金委员会关于发布精密测量物理重大研究计划项目指南的通告正文:---------------------------------------------------------------------------------------------------------------------------------------------------- 国家自然科学基金委员会关于发布精密测量物理重大研究计划项目指南的通告国家自然科学基金重大研究计划遵循“有限目标、稳定支持、集成升华、跨越发展”的总体思路,围绕国民经济、社会发展和科学前沿中的重大战略需求,重点支持我国具有基础和优势的优先发展领域。
重大研究计划以专家顶层设计引导和科技人员自由选题申请相结合的方式,凝聚优势力量,形成具有相对统一目标或方向的项目群,通过相对稳定和较高强度的支持,积极促进学科交叉,培养创新人才,实现若干重点领域或重要方向的跨越发展,提升我国基础研究创新能力,为国民经济和社会发展提供科学支撑。
国家自然科学基金委员会(以下简称自然科学基金委)现公布精密测量物理重大研究计划2013年度项目指南(见附件)。
一、申请条件本重大研究计划项目申请人应当具备以下条件:1.具有承担基础研究课题的经历;2.具有高级专业技术职务(职称);正在博士后站内从事研究、正在攻读研究生学位以及《国家自然科学基金条例》第十条第二款所列的科学技术人员不得申请。
二、限项规定1.具有高级专业技术职务(职称)的人员,申请或参与申请本次发布的重大研究计划项目与正在承担(包括负责人和主要参与者)以下类型项目合计限为3项:面上项目、重点项目、重大项目、重大研究计划项目(不包括集成项目和指导专家组调研项目)、联合基金项目(指同一名称联合基金项目)、青年科学基金项目、地区科学基金项目、优秀青年科学基金项目、国家杰出青年科学基金项目(申请时不限项)、国际(地区)合作研究项目(特殊说明的除外)、科学仪器基础研究专款项目、国家重大科研仪器设备研制专项(自由申请项目)、优秀国家重点实验室研究专项项目,以及资助期限超过1年的委主任基金项目和科学部主任基金项目等。
平面三维精密定位平台设计与研究
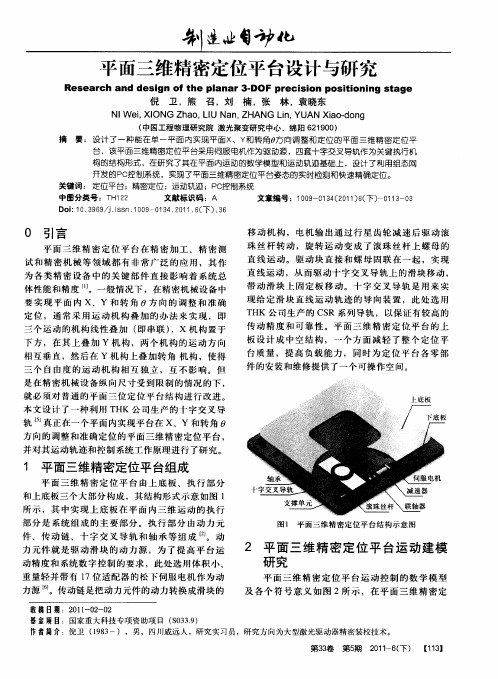
2 平 面 三维 精 密 定 位 平 台运 动建 模 研 究
平 面三 维精 密定 位 平 台运 动 控 制 的 数 学 模 型
力 源 。传动 链是 把动 力元 件的动 力转 换成 滑块 的
收 稿 日期 :2 1 - 2 0 0 1 0- 2
【 1 】 第3 卷 14 3 第5 期 21— ( ) 01 6下
图3 定 位 平 台控 制 系统 原 理 图
务l
在 控 制 系 统 中 ,采 用 位 置 闭 环 控 制 ,在 控 制 方 法 上 选 择 了 变 结 构 自适 P D控 制 ,以 达 到 时 间 I 最 短和误 差 最小 的最 佳控 制 。考虑 到工 作 特性 , 即
P C控 制工 作 台 ,进 行数 据 分析 和 算 法控 制 ,从 而
利 用可 编 程 控 制 器 直 接控 制 电机 适 配 器 驱 动 各 个 电机 进 行 控
制平 面三 维 精 密定 位 平 台运 动 ,如 图 3所 示 ,这
带 动 滑 块 上 固 定 板 移动 。十 字 交 叉导 轨 是 用 来 实 现 给 定 滑 块 直 线运 动 轨 迹 的导 向装 置 ,此 处 选 用 T HK公 司 生产 的 C R系列 导轨 ,以保 证有 较高 的 S 传 动 精 度 和 可靠 性 。平 面三 维 精 密定 位 平 台 的 上 板设 计 成 中 空结 构 ,一个 方 面 减 轻 了整 个 定 位平
6 = R C S6 + X1 ) RC S + o + 4 X1 (0 O + o - (X1 ) x( ) O O 6 = R C S5 + X + 0一 So + 0+ 5 X2 (0 O 2 ) R C (x2 ) x( ) O O
导航学
Vorkuta
Krasnoznamensk SCC MS
Zelenchuk
Schelkovo
MS TT&C
LS CC-M
Yenisseisk
MS
MS TT&C
Yakutsk Komsomolsk
MS TT&C
LS CC-M
MS
Ulan-Ude
MS Nurek
MS
SCC – system control center
一、GPS现代化
GPS现代化构成 空间区段现代化
Block IIR一M卫星、Black II F卫星以及GPSIII卫星上增 加发射L2C、L5、L1C和M码等新信号,以及增强卫星信 号功率等措施
地面控制区段现代化
随发射的新信号做相应升级 SAASM——GPS PPS 应用关键措施 AII——精度改善创新(Accuracy Improvement Initiative) WAGE——广域GPS提高
GNSS兼容与互用的合作, 民用信号互用共享
除全球系统,区域系统 和局域系统对其进行增 强
多系统兼容 多层次增强
多模化应用 多手段集成
除导航,还用于定位、 授时、测向
利用非卫星导航手段: 蜂窝移动通信(UMTS)网络、 WIFI网络、惯性导航、伪卫星、 无线电信标等
五、GNSS展望
GNSS 目标
CDMA
FDMA/CDMA
频率数
双频/三频
双频(未来三频)
Galileo
Galileo系统时 GTRF 3 56o
14小时05分 配备
CDMA
五频
BDS
北斗系统时 CGCS2000
3 55o / 配备
三自由度精密定位工作台的设计与运动学分析
台位移输 出的影 响 , 进一步提 高 了所建数 学模 型的精确度 . 用有 限元分析 工具仿 真 了所设 计的定位 工作 台的性 能, 利
确 定 了该 工作 台的修 正 系数 矩 阵 , 终仿 真 试 验 验 证 了所 建 运 动 学 模 型 的 正 确 性 . 最
关键 词:压印光刻 ;机构设计 ;运动学建模
Ab ta t sr c :A - 3 DOF pe o d ie o iz —rv n c mpl n a all o i o i g sa eh sb e e in d t e h e urm e to i tp r l st n n tg a e n d sg e o me tt er q i a e p i e n f
中 图分 类 号 :T 7 3 H 0 文 献 标 志码 :A 文章 编 号 :0 9 —17 2 1 ) 50 5 —7 4 32 3 (0 0 0 .4 70
De i n a d Fo wa d Ki e tc f - sg n r r n ma iso DOF Pr c so sto i g S a e 3 e ii n Po ii n n t g
d s lc me t O t a e a c r c ft e ma h ma i a o e a e n r ie Th i e tcp r o a c f h o i ip a e n ,S h t h c u a y o t e tc l t h m d l sb e a s d. ek n ma i e f r n e o ep s - h m t t n n t g a e n smu a e t n t l me ta a y i e h i u n t d f d c e c e tm a r a e n i i g sa e h sb e i l t d wi f i e e n n l ss t c n q e a d i mo i e o f i n ti h sb e o hi e s i i x d t r i e .S mu a i n r s l a e v l a e h sa ih d k n m a i o e ,wh c a lo b p l d t t e ee m n d i l to e u t h v a i t d t e e tbl e i e t m d l s d s c ih c n as e a p i o oh r e
双边驱动精密XY运动平台解耦控制研究
O 引 言
随着半 导 体 产业 的高 速发 展 ,c芯 片 集 成度 越 I
5 采 用 自适 应控 制策 略来协 调 双 电机 运动 达 到提 高 ]
同步精度 的 目的 文献 [ — ] 由旋 转 电 机 +滚 珠 67 对
丝 杠组成 的具有 强机 械 耦合 对 称平 台同步 运 动控 制 进行 了研 究 。文献 [ ] 直线 电机 与 横 梁通 过 铰 链 8 对
w a e o me s r h n ea to s Be i e , h e o pl o pe s t ra d o t tta f r to s us d t a u e t e it r ci n . sd s t e d c u i c m ng n a o n u pu rnso ma in ma ti u tbepaa t rv r n t sto fx sie Ther s l o h i a in s o st tt e o r m s r me e - a yig wih po iin o - l . x d e ut ft e smulto h w ha hed c u- pl g c n r tucu e c n a q r o d ta kn pe t n fe tvey r s ri h o c it r n e o n o tolsr t r a c uieg o r c ig pr y a d e fc i l e tan t e f r e d su ba c f i o r t e H - rv . h d ie K e o ds H - rv ; e iin X Y t g ;d c u ig c nto ; r m ee — r n yse yw r : d ie pr cso s a e e o pl o r l pa a trvayig s tm n
x-y工作台文献综述数控专业毕业设计文献综述
参考资料[1] 傅晓琳.机电一体化系统设计课程设计指导书.重庆: 重庆交通大学,2009,1~130.[2] 范超毅,赵天婵,吴斌方,等.数控技术课程设计.武汉: 华中科技大学出版社,2007,10~190.[3] 田振亚,高东强,郭文举,等.二维数控工作台设计.机械设计与制造,2009,(2):179~180.[4] 王晓明.电动机的单片机控制.北京:北京航空航天大学出版社,2002,181~214.[5] 尹志强.机电一体化系统设计课程设计指导书.北京: 机械工业出版社,2007,58~192.[6] 张毅刚,彭喜元,姜守达,等.新编MCS-51单片机应用设计.哈尔滨:哈尔滨工业大学出版社,2008,8~321.[7] 张志良.单片机原理与控制技术.北京:机械工业出版社,2001,222~227.[8] 安东省,崔焱.AT89C51单片机与PC及串行通信设计.山西电子技术,2009,(4):46~58.[9] 常喜,刘微.单片机和PC及串行通信设计. 网络与通信,2009,(4):105-108.[10] 甄任贺,愈寿益.单片机与PC机串行通信的实现方法.广东技术师范学院学报,2006,(4):25~27.[11] Kazuo Yamazkaki, Yadong Liu, Xingui Guo.STUDY ON SYSTEMATIC CNC CORE DESIGN METHOD FOLLOWING MODEL-DRIVEN DESIGN STRATEGY.Transactions of NAMRI/SME,2007,(35):497~504.[12] 李文元,明兴祖.基于MCS-51单片机的普通车床数控化改造设计.工艺与装备,2007,(5):75~78.[13] 康伟,王艳秋.基于单片机的机床经济型数控系统设计.辽宁工学院学报,2006,(3):161~163.[14] 王玉琳.三相反应式步进电机的一种实用型驱动器.电力电子技术,2005,(3):71~72.[15] 杜家熙,陈艳锋,李国厚.基于单片机的步进电机控制器设计.煤矿机械,2007,(2):88~90.[16] 杨辉媛,杨红海,谭伟杰.基于AT89C51单片机步进电机控制系统的设计.舰船电子工程,2008,(8):204~206.[17] 常喜,姜文龙,丁桂英.基于AT89C51单片机的步进电机控制系统.甘肃联合大学学报,2009,23(11):8~10.[18] 王海波,吴晓光,李沛,等.基于AT89S52单片机步进电机控制系统设计.机电产片开发与创新,2009,(6):161~162x-y工作台文献综述1 前言装备工业的技术水平和现代化程度决定着整个国民经济的水平和现代化程度,数控技术及装备是发展新兴高新技术产业和尖端工业(如信息技术及其产业、生物技术及其产业、航空、航天等国防工业产业)的使能技术和最基本的装备。
5双边驱动精密XY运动平台解耦控制研究
分的系统仿真也可以验证该策略能够获得较好的解
耦控制效果。因此, 双边驱动两直线电机的同步控 制通过解耦补偿器和输出变换矩阵能够将双边驱动
精密 XY运 动平台的控制 转换为 S ISO 系 统进行控 制, 即沿质心的平动 y 和绕质心的转动 H, 从而降低 了控制系统设计的难度。
根据 Q ( s )的主对角线元素设计控制器 C ( s), 采 用 P ID控制律, 表达式如下:
双边驱动是指用两个电机驱动完成一个方向的 运动, 通常称作 H-drive 结构, 双边驱动结构具有行 程大、驱动力大、负载高、带宽高等优点, 但是此类平 台的挑战是需要完成高精度同步控制。目前已有多 种控制方法用于解决双电机同步控制问题。文献 [ 4-
5 ]采 用自 适应 控制 策略 来协 调 双 电 机运 动 达 到提 高 同步精度的目的。文献 [ 6-7] 对由旋转 电机 + 滚珠 丝杠组成的具有强机械耦合对称平台同步运动控制 进行了研究。文献 [ 8] 对直线电机与横梁通过铰链 链接的双边同步控制采用分别独立控制 的方式, 而 没有考虑负 载位 置变 化对系 统模 型的 影响。文献 [ 9]采用理想解耦控制策略对双电机运动解耦, 并将 对解耦后的 SISO系统进行自适应控制设计, 但该解 耦策略对于耦合较大时难以实现, 且自适应控制算 法相对复杂。
从传递函数矩阵式 ( 1)可以看出, 任何一个输出
都不取决于一个输入, 即输入和输出之间有一种交 叉的影响。并且当系统按任何方式闭合后这种交叉
影响的关系可能会变得更加复杂。这种一个输入相
应多个输出, 或者一个输出受多个输入的影响, 称为
互联, 也称耦合。为了获得对象的双输入双输出模
型之 间 的 耦 合 关 系, 本 文 采 用 相 对 增 益 阵 列 M
双机协同交叉定位算法及误差分析

双机协同交叉定位算法及误差分析贺刚;赵雷鸣;刘昊;樊雷;黄秦煌【摘要】针对双机协同对地面或海面缓慢移动目标进行精确定位的需求,给出了双站协同定位的工作原理、定位流程及模型,从理论上推导了三维空间中双机协同交叉定位算法中的误差关系式,并详细分析了影响定位误差的各种因素,最后通过仿真验证了理论推导的正确性.研究结果为双机协同对敌目标精确定位的实际应用提供了理论支持.%Be demand for precise positioning dual synergistic move slowly on the ground or sea targets,this paper presents a dual station co-location of works,positioning processes and models, Theoretically derived from three-dimensional space dual synergistic cross-localization algorithm errors in the relationship,And a detailed analysis of the various factors influences the positioning error,and finally the simulation verify the theoretical derivation is correct. The results for the two-machine collaboration pinpoint enemy targets practical application provides theoretical support.【期刊名称】《火力与指挥控制》【年(卷),期】2015(040)011【总页数】4页(P69-71,76)【关键词】双机协同;测向交叉定位;精度分析【作者】贺刚;赵雷鸣;刘昊;樊雷;黄秦煌【作者单位】海军装备研究院,上海 200036;海军装备研究院,上海 200036;海军装备研究院,上海 200036;空军工程大学训练部,西安 710051;解放军91230部队,福州 350000【正文语种】中文【中图分类】TN92现代高技术条件下的战争[1-2],其突出特点就是空(天)、地、海、电磁波领域的四维一体化战争。
面向激光跟踪测量的大范围高精度姿态测量

面向激光跟踪测量的大范围高精度姿态测量高豆豆;董登峰;邱启帆;崔成君;王博【期刊名称】《光学精密工程》【年(卷),期】2024(32)7【摘要】针对我国高端制造业对高精度空间六自由度测量系统的迫切需求,提出一种面向激光跟踪测量的基于单目视觉的大范围全自动高精度姿态测量方法。
阐述了面向激光跟踪测量的姿态测量系统构成、合作靶标硬件设计,并建立了姿态测量数学模型;其次,分析了自适应清晰成像的姿态测量模块特性,基于光学畸变模型与张正友标定法建立了实时相机成像模型,动态校正特征点像素坐标模型,提升了特征点的提取精度;之后,结合合作靶标几何特性、EPnP算法、Soft-POSIT算法提出一种改进的姿态测量方法,建立了姿态测量系统的自动监测纠错机制,实现测量范围内任意动态位姿的自动测量。
最后,利用二维精密转台搭载合作靶标对激光跟踪测量的姿态测量系统进行精度测试。
实验结果表明:在3~10 m,方位角/俯仰角为±30°、滚动角为±180°内,适配有14个特征点的合作靶标,姿态测量精度优于0.049°;适配有10个特征点的合作靶标,姿态测量精度优于0.065°。
此方法普适性强,对合作靶标特征点布局约束较小,可以满足高端制造业激光跟踪测量的精密测量需求。
【总页数】11页(P976-986)【作者】高豆豆;董登峰;邱启帆;崔成君;王博【作者单位】中国科学院微电子研究所;中国科学院大学;南京航空航天大学自动化学院【正文语种】中文【中图分类】TH744;TP391.41【相关文献】1.齿轮激光跟踪在位测量的姿态调整模型2.动态目标全姿态激光跟踪测量3.用于大范围三维空间测量的激光跟踪仪4.基于深度学习和PnP模型的激光跟踪仪自动姿态测量5.一种基于相位测量的快速高精度大范围的激光测距法因版权原因,仅展示原文概要,查看原文内容请购买。
温州嘉泰激光JIATAI LASER 系列标记机 说明书
目录YAG激光标记机安全提示前言1、概述与型号2、YAG系列激光标记机系统基本构成及其工作原理3、技术参数4、安装与调试5、硬件与操作6、日常维护及简单故障处理7、冷水机使用说明警告!除本指南所规定的操作以外,对系统的任何其它操作,都可能使操作者遭受危险的激光辐射!防止激光辐射泄漏JIATAI LASER系列激光标记机采用封闭的激光光路设计,可以有效地防止激光辐射的泄漏。
激光器正常工作期间,标记机内部不得增设任何零件和物品。
不得在密封罩打开的状态下使用本标记系统。
严禁用眼睛直视出射激光或反射激光,以防损伤眼睛!电气安全对标记系统中电气设备进行的维护、调整必须由经过培训的对本系统各部分均熟悉的专业人员进行,以下几点特别注意:*若设备不工作时维护调整不需运行时,勿接通其电源*更换氪灯时,切勿接通系统电源,且氪灯正负极不要装反,尖端为负极,球头端为正极*系统应有良好的接地,并应定期检查*尽可能用一只手操作电气设备,以防在人体上构成回路*本标记系统的测试,有些需采用一些特殊的测量技术,参考地选择由专业技术人员决定。
前言欢迎使用我公司生产的JIATAI LASER YAG系列激光标记机,使用前请务必仔细阅读本手册。
激光标记机是一种集光学、精密机械、激光技术、电子技术、计算机和控制技术于一体的高新技术产品。
正确使用和维护此系统,对于更好的发挥其效能及延长寿命具有十分重要的意义。
通过本手册您能对激光标记机系统的工作原理有一个初步了解,并希望能按照所介绍的方法,步骤对标记机进行正确的使用和维护。
1概述与型号1.1概述本公司采用YAG激光器,高速伺服精密电机和简便易于操作的控制软件。
它集激光技术,精密机械电子技术和计算机技术于一体,广泛适用于电子、电脑、钟表及五金等行业,可标记多种金属(不锈钢、铝、铁、铜等)及非金属(PVC等)。
具有输出功率大、体积小、精度高、速度快、稳定性好、无污染、低噪音等优点。
1.2型号2JIATAI LASER YAG系列标记系统结构及工作原理2.1整机基本构成及工作原理JIATAI LASER标记系统由Nd:YAG激光器、主控柜、冷水机组、声光Q开关,“f-θ”透镜组、计算机控制系统、光学扫描振镜及其驱动器、升降工作台组成。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
关键 词 : 宽平 台
弯Th r c u e An lss a d De in o h e iin P st nn y t m t e St t r ay i n sg f e Pr cso o io ig S se wi u t i h
维普资讯
Dia eh ende r设计与研究 s n sc g Ra
X—y两 维 宽 平 台 大 范 围精 密 定 位 系统 结 构 分析 与设 计
,
杨 川 杨 必胜 王 光 亮 I
( 西安 交通大 学精 密工程 研 究所 , 陕西 西 安 7 0 4 ) 10 9
随着 I 造 、 密光 学工 程和超 精密 加工 等领 域 c制 精 的快速发展 , 迫切 需 要能 够 在 数 百 毫米 范 围 内进行 亚
1 精 密定位 系统 结构及设计要求
精密定位系统设计要求 : y两维大范围精密定 —
位 系统是具 有大 运动 范 围( 最大有 效运 行范 围 50m 5 m x50m 、 度 ( 5 m) 大跨 上平 台基座 跨度 50m 承载 工 5 m,
Ab t a t:Th r cso o i o i g s se wih lr e—s a e a d t sr c e p e iin p st n n y t m t a g i c l n wo—d me so r t b e,wh c s a p id i i n in wok a l ih i p le n u ta—p e iin p sto n l r r c so o i ni g,i e eo e a e n t e r q ie ns o C i s d v lp d b s d o h e u r me t f I ma u a t in n l a— n fcur g a d u t r p e ii n ma h n n .As t e hih s e d o he wi e wo k a l s e uie r cso c i i g h g p e f t d r tb e i rq r d,t e t e r a ay i n t e h h oy n lss o h fr e d fr t n o h i o c e o ma i ft e b g—s n wo k a l tu t r s rc s e o pa r tb e sr cu e i p o e s d;t e fn t lme ta ay i n t e h i e e n n l ss o h i e sai n y mi h r c e si ft e wo k a l t cu ei a re n。An h n t e p e iin p st — ttc a d d na c c a a tr tc o h r t b e sr t r sc ri d o i u d t e h r cso o ii o n n y tm t d r t b e o h a i ft e r t d sa h e e i g s se wih wi e wo k a l n t e b sso h o su y i c iv d.Thed v lp d s se h sr a— y e e o e y t m a e l ie r c so o i o n te c on n t e 3 0 mm 0 z d p e iin p st nig a a h p iti h 0 i x3 0 mm a g n t e 2 0 mm 5 r n e o h 5 x 2 0 mm r — wo k tb e un e h e i n la . a l d r te d sg o d Ke wo d W i e W o k a l y r s: d r t be;Be d Deo ma in;S a i a a trsi n fr t o ttc Ch r c e tc;Dy a c Ch r ce itc i n mi a a trsi
摘
要: 根据 I 制造 、 精 密) -等 行业 的 需求 , c 超 jr  ̄ 研发 了 能够用 于超 精密 定 位 系统的 两维 大范 围 、 宽平 台精 密定位 系统 。根 据宽平 台高 速运 动的要 求 , 大跨 度 平 台的 受 力变 形进 行 了理 论 分 析 , 对 系统 结 对 并 构的静 态和 动态特 性进 行 了有 限元分析 。在 理论 研 究 的基础 上 研 发 了精 密定 位 系统 。所 开 发 的 系 统能够 保证在 设计 载荷 下 , 于承 载面 积 为 20mm 5 对 5 x20mm 的 承 载 台上 任 意 一 点都 能 够在 30 0
L r e—s ae W ie W o ka l n x— Y Di n in ag c l d rt be i me so
YANG ua Ch n,YANG s e g,W ANG a ging Bih n Gu n la
(ntueo rc i n i eig X ’ nJatn nvr t, i a 0 9 C N) Istt f ei o E g er , ia i o gU i s y X ’n7 0 4 , H i P sn n n o ei 1