RTEMS 4.10 and Beyond
Unit 1 Reading and Thinking 高中英语人教版(2019)选择性必修第四册
Pre-reading
Think about the following questions. ➢ How do robots already help humans in their lives today?
shop
education
ChatGPT
factory
home
Think about the following questions. ➢ What is a domestic robot? Name some domestic robots you know or use.
and caring;
kindly;
emotions can change
always the same warm body
Use the words in the boxes to describe the similarities and differences.
EXAMPLE A human being’s facial expression changes often, whereas Tony’s never changes.
Cultural notes
Science fiction, abbreviation SF or sci-fi, is a form of fiction that deals principally with the impact of actual or imagined science upon society or individuals.
➢ Will there be a robot in this novel? What type of robot will it be?
While-reading
H[1].264_MPEG-4 Part 10 White Paper
![H[1].264_MPEG-4 Part 10 White Paper](https://img.taocdn.com/s3/m/0ceb553e0912a2161479298a.png)
© Iain E G Richardson
07/10/02
Page 1 of 1
H.264 / MPEG-4 Part 10 : Overview
(current) ME
Fn
+
Dn
X
T Q Reorder
Inter
Entropy encode
NAL
(reference)
(reference)
(1 or 2 previously encoded frames)
F'n-1
P
பைடு நூலகம்
(reconstructed)
F'n
uF'n
Filter
+
D'n
X
T-1 Q-1 Reorder Entropy decode
+
NAL
Figure 2-2 AVC Decoder
2.1
Encoder (forward path)
An input frame Fn is presented for encoding. The frame is processed in units of a macroblock (corresponding to 16x16 pixels in the original image). Each macroblock is encoded in intra or inter mode. In either case, a prediction macroblock P is formed based on a reconstructed frame. In Intra mode, P is formed from samples in the current frame n that have previously encoded, decoded and reconstructed (uF’n in the Figures; note that the unfiltered samples are used to form P). In Inter mode, P is formed by motion-compensated prediction from one or more reference frame(s). In the Figures, the reference frame is shown as the previous encoded frame F’n-1 ; however, the predicton for each macroblock may be formed from one or two past or future frames (in time order) that have already been encoded and reconstructed. The prediction P is subtracted from the current macroblock to produce a residual or difference macroblock Dn. This is transformed (using a block transform) and quantized to give X, a set of quantized transform coefficients. These coefficients are re-ordered and entropy encoded. The entropyencoded coefficients, together with side information required to decode the macroblock (such as the macroblock prediction mode, quantizer step size, motion vector information describing how the macroblock was motion-compensated, etc) form the compressed bitstream. This is passed to a Network Abstraction Layer (NAL) for transmission or storage. 2.2 Encoder (reconstruction path)
Real-Time Systems and Embedded Systems

Real-Time Systems and Embedded Systems Real-Time Systems and Embedded Systems have become an integral part of our daily lives. From the smartphones we use to the cars we drive, these systems play a crucial role in ensuring efficient and reliable operation. In this response, we will explore the importance of real-time systems and embedded systems frommultiple perspectives. From a technological perspective, real-time systems are designed to respond to events or inputs within a specific time frame. These systems are used in various domains such as aerospace, automotive, healthcare, and industrial automation. For example, in an automotive application, a real-time system is responsible for controlling the engine, braking system, and othercritical components. Any delay or failure in these systems could have catastrophic consequences. Therefore, the real-time nature of these systems is of utmost importance to ensure safety and reliability. Embedded systems, on the other hand, are a combination of hardware and software designed to perform specific tasks within a larger system. These systems are often found in devices that we use on a daily basis, such as smartphones, smartwatches, and home appliances. The main advantage of embedded systems is their ability to perform tasks efficiently and autonomously, without the need for human intervention. For example, a smart thermostat embedded with sensors can monitor the temperature of a room and adjust the heating or cooling system accordingly, providing comfort and energy savings. From a user perspective, real-time systems and embedded systems enhance our daily lives by providing convenience, efficiency, and safety. Consider the example of a smartphone. The embedded systems within the device enable us to make phone calls, send messages, browse the internet, and use various applications seamlessly. The real-time systems ensure that these tasks are performed instantaneously, providing us with a smooth user experience. Additionally, embedded systems in smartphones also enable features such as GPS navigation, facial recognition, and augmented reality, further enhancing the user experience. From a societal perspective,real-time systems and embedded systems have a significant impact on various industries and sectors. For instance, in the healthcare industry, real-time systems are used in medical devices such as pacemakers and insulin pumps to monitor and regulate patients' vital signs in real-time. These systems can detectabnormalities and deliver life-saving treatments immediately. Similarly, in the transportation industry, real-time systems are used in traffic management systems to optimize traffic flow, reducing congestion and improving overall efficiency. This not only saves time for individuals but also reduces fuel consumption and greenhouse gas emissions, contributing to a more sustainable environment. However, it is important to consider the challenges and risks associated with real-time systems and embedded systems. One of the main challenges is ensuring the security and privacy of these systems. With the increasing interconnectedness of devicesand systems, there is a higher risk of cyber-attacks and unauthorized access. For example, a hacker gaining control of a real-time system in a power plant could cause a blackout or disrupt critical operations. Therefore, it is crucial to implement robust security measures, such as encryption and authentication protocols, to protect these systems from potential threats. Another challenge is the complexity of developing and maintaining real-time and embedded systems. These systems often require specialized knowledge and expertise in both hardware and software design. Additionally, as technology advances, the requirements and specifications of these systems change, necessitating frequent updates and modifications. This can be a time-consuming and costly process. Therefore, it is essential to have a skilled workforce and effective development methodologies in place to ensure the successful implementation and maintenance of these systems.In conclusion, real-time systems and embedded systems are vital components of our technological landscape. They provide us with convenience, efficiency, and safetyin various domains. From a technological perspective, these systems ensure timely and reliable operation, while from a user perspective, they enhance our dailylives by providing seamless and intuitive experiences. Moreover, from a societal perspective, these systems have a significant impact on industries and sectors, improving efficiency and sustainability. However, it is important to address the challenges associated with these systems, such as security and complexity, to ensure their successful implementation and maintenance.。
美国文学5、T.S.Eliot艾略特

i Aesthetic Views
1 . Apoem should be an organic thing i n i t s e l f , a made o b j e c t . Once i t i s f i n i s h e d t h e poet w i l l no longer have c o n t r o l of i t I t should be judged, analyzed by i t s e l f without the interference of the p o e t ’ s personal influence and intentional elements and other elements.
l ys
According t o h i s t h e o r y , verse drama should conform to natual -rhythm and not be consciously poetic. His plays are w r i t t e n i n a blank verse of h i s own invention, i n which the metrical e f f e c t i not separated from the meaning, thus bringing p o e t i c a l drama t o t h e popular stage.
h
I. The Burial of t h e Dead II. AGame of Chess III. The F i r e Sermon IV. Death by Water V. What t h e Thunder Said
极限交换机VDX6740和VDX6740T产品介绍说明书
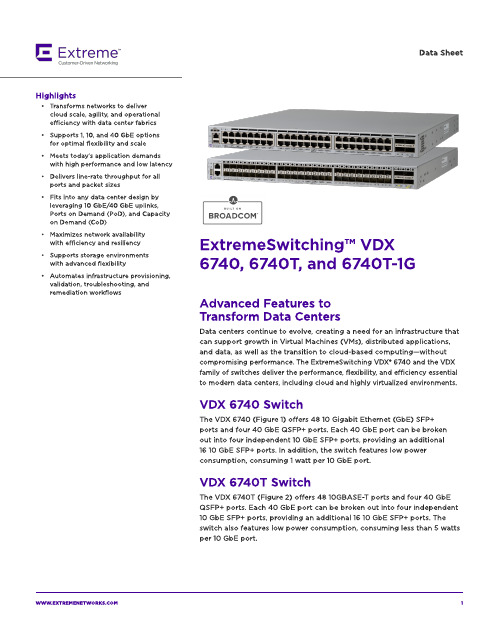
The VDX 674 0 T-1G ( Fig ure 3) offers 4 8 10 0 0 BA SE-T p ort s and t w o 4 0 Gb E QSFP+ p ort s. Each 4 0 Gb E p ort can b e b roken out int o four ind ep end ent 10 Gb E SFP+ p ort s, p rovid ing an ad d it ional eig ht 10 Gb E SFP+ p ort s for up link. A ll 4 8 10 0 0 BA SE-T p ort s can b e up g rad ed t o 4 8 10 GBA SE-T p ort s via t he Cap acit y on Dem and (CoD) soft w are license. Tw o 4 0 Gb E p ort s are enab led as p art of t he b ase license. The ad d it ional t w o 4 0 Gb E p ort s can b e up g rad ed via t he Port s on Dem and ( PoD) soft w are license.
- Meet s t od ay?s ap p licat ion d em and s w it h high perform ance and low latency
- Delivers line-rate t hroughput for all p ort s and p acket sizes
Dat a Sheet
T.W. ANDERSON (1971). The Statistical Analysis of Time Series. Series in Probability and Ma
425 BibliographyH.A KAIKE(1974).Markovian representation of stochastic processes and its application to the analysis of autoregressive moving average processes.Annals Institute Statistical Mathematics,vol.26,pp.363-387. B.D.O.A NDERSON and J.B.M OORE(1979).Optimal rmation and System Sciences Series, Prentice Hall,Englewood Cliffs,NJ.T.W.A NDERSON(1971).The Statistical Analysis of Time Series.Series in Probability and Mathematical Statistics,Wiley,New York.R.A NDRE-O BRECHT(1988).A new statistical approach for the automatic segmentation of continuous speech signals.IEEE Trans.Acoustics,Speech,Signal Processing,vol.ASSP-36,no1,pp.29-40.R.A NDRE-O BRECHT(1990).Reconnaissance automatique de parole`a partir de segments acoustiques et de mod`e les de Markov cach´e s.Proc.Journ´e es Etude de la Parole,Montr´e al,May1990(in French).R.A NDRE-O BRECHT and H.Y.S U(1988).Three acoustic labellings for phoneme based continuous speech recognition.Proc.Speech’88,Edinburgh,UK,pp.943-950.U.A PPEL and A.VON B RANDT(1983).Adaptive sequential segmentation of piecewise stationary time rmation Sciences,vol.29,no1,pp.27-56.L.A.A ROIAN and H.L EVENE(1950).The effectiveness of quality control procedures.Jal American Statis-tical Association,vol.45,pp.520-529.K.J.A STR¨OM and B.W ITTENMARK(1984).Computer Controlled Systems:Theory and rma-tion and System Sciences Series,Prentice Hall,Englewood Cliffs,NJ.M.B AGSHAW and R.A.J OHNSON(1975a).The effect of serial correlation on the performance of CUSUM tests-Part II.Technometrics,vol.17,no1,pp.73-80.M.B AGSHAW and R.A.J OHNSON(1975b).The influence of reference values and estimated variance on the ARL of CUSUM tests.Jal Royal Statistical Society,vol.37(B),no3,pp.413-420.M.B AGSHAW and R.A.J OHNSON(1977).Sequential procedures for detecting parameter changes in a time-series model.Jal American Statistical Association,vol.72,no359,pp.593-597.R.K.B ANSAL and P.P APANTONI-K AZAKOS(1986).An algorithm for detecting a change in a stochastic process.IEEE rmation Theory,vol.IT-32,no2,pp.227-235.G.A.B ARNARD(1959).Control charts and stochastic processes.Jal Royal Statistical Society,vol.B.21, pp.239-271.A.E.B ASHARINOV andB.S.F LEISHMAN(1962).Methods of the statistical sequential analysis and their radiotechnical applications.Sovetskoe Radio,Moscow(in Russian).M.B ASSEVILLE(1978).D´e viations par rapport au maximum:formules d’arrˆe t et martingales associ´e es. Compte-rendus du S´e minaire de Probabilit´e s,Universit´e de Rennes I.M.B ASSEVILLE(1981).Edge detection using sequential methods for change in level-Part II:Sequential detection of change in mean.IEEE Trans.Acoustics,Speech,Signal Processing,vol.ASSP-29,no1,pp.32-50.426B IBLIOGRAPHY M.B ASSEVILLE(1982).A survey of statistical failure detection techniques.In Contribution`a la D´e tectionS´e quentielle de Ruptures de Mod`e les Statistiques,Th`e se d’Etat,Universit´e de Rennes I,France(in English). M.B ASSEVILLE(1986).The two-models approach for the on-line detection of changes in AR processes. In Detection of Abrupt Changes in Signals and Dynamical Systems(M.Basseville,A.Benveniste,eds.). Lecture Notes in Control and Information Sciences,LNCIS77,Springer,New York,pp.169-215.M.B ASSEVILLE(1988).Detecting changes in signals and systems-A survey.Automatica,vol.24,pp.309-326.M.B ASSEVILLE(1989).Distance measures for signal processing and pattern recognition.Signal Process-ing,vol.18,pp.349-369.M.B ASSEVILLE and A.B ENVENISTE(1983a).Design and comparative study of some sequential jump detection algorithms for digital signals.IEEE Trans.Acoustics,Speech,Signal Processing,vol.ASSP-31, no3,pp.521-535.M.B ASSEVILLE and A.B ENVENISTE(1983b).Sequential detection of abrupt changes in spectral charac-teristics of digital signals.IEEE rmation Theory,vol.IT-29,no5,pp.709-724.M.B ASSEVILLE and A.B ENVENISTE,eds.(1986).Detection of Abrupt Changes in Signals and Dynamical Systems.Lecture Notes in Control and Information Sciences,LNCIS77,Springer,New York.M.B ASSEVILLE and I.N IKIFOROV(1991).A unified framework for statistical change detection.Proc.30th IEEE Conference on Decision and Control,Brighton,UK.M.B ASSEVILLE,B.E SPIAU and J.G ASNIER(1981).Edge detection using sequential methods for change in level-Part I:A sequential edge detection algorithm.IEEE Trans.Acoustics,Speech,Signal Processing, vol.ASSP-29,no1,pp.24-31.M.B ASSEVILLE, A.B ENVENISTE and G.M OUSTAKIDES(1986).Detection and diagnosis of abrupt changes in modal characteristics of nonstationary digital signals.IEEE rmation Theory,vol.IT-32,no3,pp.412-417.M.B ASSEVILLE,A.B ENVENISTE,G.M OUSTAKIDES and A.R OUG´E E(1987a).Detection and diagnosis of changes in the eigenstructure of nonstationary multivariable systems.Automatica,vol.23,no3,pp.479-489. M.B ASSEVILLE,A.B ENVENISTE,G.M OUSTAKIDES and A.R OUG´E E(1987b).Optimal sensor location for detecting changes in dynamical behavior.IEEE Trans.Automatic Control,vol.AC-32,no12,pp.1067-1075.M.B ASSEVILLE,A.B ENVENISTE,B.G ACH-D EVAUCHELLE,M.G OURSAT,D.B ONNECASE,P.D OREY, M.P REVOSTO and M.O LAGNON(1993).Damage monitoring in vibration mechanics:issues in diagnos-tics and predictive maintenance.Mechanical Systems and Signal Processing,vol.7,no5,pp.401-423.R.V.B EARD(1971).Failure Accommodation in Linear Systems through Self-reorganization.Ph.D.Thesis, Dept.Aeronautics and Astronautics,MIT,Cambridge,MA.A.B ENVENISTE and J.J.F UCHS(1985).Single sample modal identification of a nonstationary stochastic process.IEEE Trans.Automatic Control,vol.AC-30,no1,pp.66-74.A.B ENVENISTE,M.B ASSEVILLE and G.M OUSTAKIDES(1987).The asymptotic local approach to change detection and model validation.IEEE Trans.Automatic Control,vol.AC-32,no7,pp.583-592.A.B ENVENISTE,M.M ETIVIER and P.P RIOURET(1990).Adaptive Algorithms and Stochastic Approxima-tions.Series on Applications of Mathematics,(A.V.Balakrishnan,I.Karatzas,M.Yor,eds.).Springer,New York.A.B ENVENISTE,M.B ASSEVILLE,L.E L G HAOUI,R.N IKOUKHAH and A.S.W ILLSKY(1992).An optimum robust approach to statistical failure detection and identification.IFAC World Conference,Sydney, July1993.B IBLIOGRAPHY427 R.H.B ERK(1973).Some asymptotic aspects of sequential analysis.Annals Statistics,vol.1,no6,pp.1126-1138.R.H.B ERK(1975).Locally most powerful sequential test.Annals Statistics,vol.3,no2,pp.373-381.P.B ILLINGSLEY(1968).Convergence of Probability Measures.Wiley,New York.A.F.B ISSELL(1969).Cusum techniques for quality control.Applied Statistics,vol.18,pp.1-30.M.E.B IVAIKOV(1991).Control of the sample size for recursive estimation of parameters subject to abrupt changes.Automation and Remote Control,no9,pp.96-103.R.E.B LAHUT(1987).Principles and Practice of Information Theory.Addison-Wesley,Reading,MA.I.F.B LAKE and W.C.L INDSEY(1973).Level-crossing problems for random processes.IEEE r-mation Theory,vol.IT-19,no3,pp.295-315.G.B ODENSTEIN and H.M.P RAETORIUS(1977).Feature extraction from the encephalogram by adaptive segmentation.Proc.IEEE,vol.65,pp.642-652.T.B OHLIN(1977).Analysis of EEG signals with changing spectra using a short word Kalman estimator. Mathematical Biosciences,vol.35,pp.221-259.W.B¨OHM and P.H ACKL(1990).Improved bounds for the average run length of control charts based on finite weighted sums.Annals Statistics,vol.18,no4,pp.1895-1899.T.B OJDECKI and J.H OSZA(1984).On a generalized disorder problem.Stochastic Processes and their Applications,vol.18,pp.349-359.L.I.B ORODKIN and V.V.M OTTL’(1976).Algorithm forfinding the jump times of random process equation parameters.Automation and Remote Control,vol.37,no6,Part1,pp.23-32.A.A.B OROVKOV(1984).Theory of Mathematical Statistics-Estimation and Hypotheses Testing,Naouka, Moscow(in Russian).Translated in French under the title Statistique Math´e matique-Estimation et Tests d’Hypoth`e ses,Mir,Paris,1987.G.E.P.B OX and G.M.J ENKINS(1970).Time Series Analysis,Forecasting and Control.Series in Time Series Analysis,Holden-Day,San Francisco.A.VON B RANDT(1983).Detecting and estimating parameters jumps using ladder algorithms and likelihood ratio test.Proc.ICASSP,Boston,MA,pp.1017-1020.A.VON B RANDT(1984).Modellierung von Signalen mit Sprunghaft Ver¨a nderlichem Leistungsspektrum durch Adaptive Segmentierung.Doctor-Engineer Dissertation,M¨u nchen,RFA(in German).S.B RAUN,ed.(1986).Mechanical Signature Analysis-Theory and Applications.Academic Press,London. L.B REIMAN(1968).Probability.Series in Statistics,Addison-Wesley,Reading,MA.G.S.B RITOV and L.A.M IRONOVSKI(1972).Diagnostics of linear systems of automatic regulation.Tekh. Kibernetics,vol.1,pp.76-83.B.E.B RODSKIY and B.S.D ARKHOVSKIY(1992).Nonparametric Methods in Change-point Problems. Kluwer Academic,Boston.L.D.B ROEMELING(1982).Jal Econometrics,vol.19,Special issue on structural change in Econometrics. L.D.B ROEMELING and H.T SURUMI(1987).Econometrics and Structural Change.Dekker,New York. D.B ROOK and D.A.E VANS(1972).An approach to the probability distribution of Cusum run length. Biometrika,vol.59,pp.539-550.J.B RUNET,D.J AUME,M.L ABARR`E RE,A.R AULT and M.V ERG´E(1990).D´e tection et Diagnostic de Pannes.Trait´e des Nouvelles Technologies,S´e rie Diagnostic et Maintenance,Herm`e s,Paris(in French).428B IBLIOGRAPHY S.P.B RUZZONE and M.K AVEH(1984).Information tradeoffs in using the sample autocorrelation function in ARMA parameter estimation.IEEE Trans.Acoustics,Speech,Signal Processing,vol.ASSP-32,no4, pp.701-715.A.K.C AGLAYAN(1980).Necessary and sufficient conditions for detectability of jumps in linear systems. IEEE Trans.Automatic Control,vol.AC-25,no4,pp.833-834.A.K.C AGLAYAN and R.E.L ANCRAFT(1983).Reinitialization issues in fault tolerant systems.Proc.Amer-ican Control Conf.,pp.952-955.A.K.C AGLAYAN,S.M.A LLEN and K.W EHMULLER(1988).Evaluation of a second generation reconfigu-ration strategy for aircraftflight control systems subjected to actuator failure/surface damage.Proc.National Aerospace and Electronic Conference,Dayton,OH.P.E.C AINES(1988).Linear Stochastic Systems.Series in Probability and Mathematical Statistics,Wiley, New York.M.J.C HEN and J.P.N ORTON(1987).Estimation techniques for tracking rapid parameter changes.Intern. Jal Control,vol.45,no4,pp.1387-1398.W.K.C HIU(1974).The economic design of cusum charts for controlling normal mean.Applied Statistics, vol.23,no3,pp.420-433.E.Y.C HOW(1980).A Failure Detection System Design Methodology.Ph.D.Thesis,M.I.T.,L.I.D.S.,Cam-bridge,MA.E.Y.C HOW and A.S.W ILLSKY(1984).Analytical redundancy and the design of robust failure detection systems.IEEE Trans.Automatic Control,vol.AC-29,no3,pp.689-691.Y.S.C HOW,H.R OBBINS and D.S IEGMUND(1971).Great Expectations:The Theory of Optimal Stop-ping.Houghton-Mifflin,Boston.R.N.C LARK,D.C.F OSTH and V.M.W ALTON(1975).Detection of instrument malfunctions in control systems.IEEE Trans.Aerospace Electronic Systems,vol.AES-11,pp.465-473.A.C OHEN(1987).Biomedical Signal Processing-vol.1:Time and Frequency Domain Analysis;vol.2: Compression and Automatic Recognition.CRC Press,Boca Raton,FL.J.C ORGE and F.P UECH(1986).Analyse du rythme cardiaque foetal par des m´e thodes de d´e tection de ruptures.Proc.7th INRIA Int.Conf.Analysis and optimization of Systems.Antibes,FR(in French).D.R.C OX and D.V.H INKLEY(1986).Theoretical Statistics.Chapman and Hall,New York.D.R.C OX and H.D.M ILLER(1965).The Theory of Stochastic Processes.Wiley,New York.S.V.C ROWDER(1987).A simple method for studying run-length distributions of exponentially weighted moving average charts.Technometrics,vol.29,no4,pp.401-407.H.C S¨ORG¨O and L.H ORV´ATH(1988).Nonparametric methods for change point problems.In Handbook of Statistics(P.R.Krishnaiah,C.R.Rao,eds.),vol.7,Elsevier,New York,pp.403-425.R.B.D AVIES(1973).Asymptotic inference in stationary gaussian time series.Advances Applied Probability, vol.5,no3,pp.469-497.J.C.D ECKERT,M.N.D ESAI,J.J.D EYST and A.S.W ILLSKY(1977).F-8DFBW sensor failure identification using analytical redundancy.IEEE Trans.Automatic Control,vol.AC-22,no5,pp.795-803.M.H.D E G ROOT(1970).Optimal Statistical Decisions.Series in Probability and Statistics,McGraw-Hill, New York.J.D ESHAYES and D.P ICARD(1979).Tests de ruptures dans un mod`e pte-Rendus de l’Acad´e mie des Sciences,vol.288,Ser.A,pp.563-566(in French).B IBLIOGRAPHY429 J.D ESHAYES and D.P ICARD(1983).Ruptures de Mod`e les en Statistique.Th`e ses d’Etat,Universit´e deParis-Sud,Orsay,France(in French).J.D ESHAYES and D.P ICARD(1986).Off-line statistical analysis of change-point models using non para-metric and likelihood methods.In Detection of Abrupt Changes in Signals and Dynamical Systems(M. Basseville,A.Benveniste,eds.).Lecture Notes in Control and Information Sciences,LNCIS77,Springer, New York,pp.103-168.B.D EVAUCHELLE-G ACH(1991).Diagnostic M´e canique des Fatigues sur les Structures Soumises`a des Vibrations en Ambiance de Travail.Th`e se de l’Universit´e Paris IX Dauphine(in French).B.D EVAUCHELLE-G ACH,M.B ASSEVILLE and A.B ENVENISTE(1991).Diagnosing mechanical changes in vibrating systems.Proc.SAFEPROCESS’91,Baden-Baden,FRG,pp.85-89.R.D I F RANCESCO(1990).Real-time speech segmentation using pitch and convexity jump models:applica-tion to variable rate speech coding.IEEE Trans.Acoustics,Speech,Signal Processing,vol.ASSP-38,no5, pp.741-748.X.D ING and P.M.F RANK(1990).Fault detection via factorization approach.Systems and Control Letters, vol.14,pp.431-436.J.L.D OOB(1953).Stochastic Processes.Wiley,New York.V.D RAGALIN(1988).Asymptotic solutions in detecting a change in distribution under an unknown param-eter.Statistical Problems of Control,Issue83,Vilnius,pp.45-52.B.D UBUISSON(1990).Diagnostic et Reconnaissance des Formes.Trait´e des Nouvelles Technologies,S´e rie Diagnostic et Maintenance,Herm`e s,Paris(in French).A.J.D UNCAN(1986).Quality Control and Industrial Statistics,5th edition.Richard D.Irwin,Inc.,Home-wood,IL.J.D URBIN(1971).Boundary-crossing probabilities for the Brownian motion and Poisson processes and techniques for computing the power of the Kolmogorov-Smirnov test.Jal Applied Probability,vol.8,pp.431-453.J.D URBIN(1985).Thefirst passage density of the crossing of a continuous Gaussian process to a general boundary.Jal Applied Probability,vol.22,no1,pp.99-122.A.E MAMI-N AEINI,M.M.A KHTER and S.M.R OCK(1988).Effect of model uncertainty on failure detec-tion:the threshold selector.IEEE Trans.Automatic Control,vol.AC-33,no12,pp.1106-1115.J.D.E SARY,F.P ROSCHAN and D.W.W ALKUP(1967).Association of random variables with applications. Annals Mathematical Statistics,vol.38,pp.1466-1474.W.D.E WAN and K.W.K EMP(1960).Sampling inspection of continuous processes with no autocorrelation between successive results.Biometrika,vol.47,pp.263-280.G.F AVIER and A.S MOLDERS(1984).Adaptive smoother-predictors for tracking maneuvering targets.Proc. 23rd Conf.Decision and Control,Las Vegas,NV,pp.831-836.W.F ELLER(1966).An Introduction to Probability Theory and Its Applications,vol.2.Series in Probability and Mathematical Statistics,Wiley,New York.R.A.F ISHER(1925).Theory of statistical estimation.Proc.Cambridge Philosophical Society,vol.22, pp.700-725.M.F ISHMAN(1988).Optimization of the algorithm for the detection of a disorder,based on the statistic of exponential smoothing.In Statistical Problems of Control,Issue83,Vilnius,pp.146-151.R.F LETCHER(1980).Practical Methods of Optimization,2volumes.Wiley,New York.P.M.F RANK(1990).Fault diagnosis in dynamic systems using analytical and knowledge based redundancy -A survey and new results.Automatica,vol.26,pp.459-474.430B IBLIOGRAPHY P.M.F RANK(1991).Enhancement of robustness in observer-based fault detection.Proc.SAFEPRO-CESS’91,Baden-Baden,FRG,pp.275-287.P.M.F RANK and J.W¨UNNENBERG(1989).Robust fault diagnosis using unknown input observer schemes. In Fault Diagnosis in Dynamic Systems-Theory and Application(R.Patton,P.Frank,R.Clark,eds.). International Series in Systems and Control Engineering,Prentice Hall International,London,UK,pp.47-98.K.F UKUNAGA(1990).Introduction to Statistical Pattern Recognition,2d ed.Academic Press,New York. S.I.G ASS(1958).Linear Programming:Methods and Applications.McGraw Hill,New York.W.G E and C.Z.F ANG(1989).Extended robust observation approach for failure isolation.Int.Jal Control, vol.49,no5,pp.1537-1553.W.G ERSCH(1986).Two applications of parametric time series modeling methods.In Mechanical Signature Analysis-Theory and Applications(S.Braun,ed.),chap.10.Academic Press,London.J.J.G ERTLER(1988).Survey of model-based failure detection and isolation in complex plants.IEEE Control Systems Magazine,vol.8,no6,pp.3-11.J.J.G ERTLER(1991).Analytical redundancy methods in fault detection and isolation.Proc.SAFEPRO-CESS’91,Baden-Baden,FRG,pp.9-22.B.K.G HOSH(1970).Sequential Tests of Statistical Hypotheses.Addison-Wesley,Cambridge,MA.I.N.G IBRA(1975).Recent developments in control charts techniques.Jal Quality Technology,vol.7, pp.183-192.J.P.G ILMORE and R.A.M C K ERN(1972).A redundant strapdown inertial reference unit(SIRU).Jal Space-craft,vol.9,pp.39-47.M.A.G IRSHICK and H.R UBIN(1952).A Bayes approach to a quality control model.Annals Mathematical Statistics,vol.23,pp.114-125.A.L.G OEL and S.M.W U(1971).Determination of the ARL and a contour nomogram for CUSUM charts to control normal mean.Technometrics,vol.13,no2,pp.221-230.P.L.G OLDSMITH and H.W HITFIELD(1961).Average run lengths in cumulative chart quality control schemes.Technometrics,vol.3,pp.11-20.G.C.G OODWIN and K.S.S IN(1984).Adaptive Filtering,Prediction and rmation and System Sciences Series,Prentice Hall,Englewood Cliffs,NJ.R.M.G RAY and L.D.D AVISSON(1986).Random Processes:a Mathematical Approach for Engineers. Information and System Sciences Series,Prentice Hall,Englewood Cliffs,NJ.C.G UEGUEN and L.L.S CHARF(1980).Exact maximum likelihood identification for ARMA models:a signal processing perspective.Proc.1st EUSIPCO,Lausanne.D.E.G USTAFSON, A.S.W ILLSKY,J.Y.W ANG,M.C.L ANCASTER and J.H.T RIEBWASSER(1978). ECG/VCG rhythm diagnosis using statistical signal analysis.Part I:Identification of persistent rhythms. Part II:Identification of transient rhythms.IEEE Trans.Biomedical Engineering,vol.BME-25,pp.344-353 and353-361.F.G USTAFSSON(1991).Optimal segmentation of linear regression parameters.Proc.IFAC/IFORS Symp. Identification and System Parameter Estimation,Budapest,pp.225-229.T.H¨AGGLUND(1983).New Estimation Techniques for Adaptive Control.Ph.D.Thesis,Lund Institute of Technology,Lund,Sweden.T.H¨AGGLUND(1984).Adaptive control of systems subject to large parameter changes.Proc.IFAC9th World Congress,Budapest.B IBLIOGRAPHY431 P.H ALL and C.C.H EYDE(1980).Martingale Limit Theory and its Application.Probability and Mathemat-ical Statistics,a Series of Monographs and Textbooks,Academic Press,New York.W.J.H ALL,R.A.W IJSMAN and J.K.G HOSH(1965).The relationship between sufficiency and invariance with applications in sequential analysis.Ann.Math.Statist.,vol.36,pp.576-614.E.J.H ANNAN and M.D EISTLER(1988).The Statistical Theory of Linear Systems.Series in Probability and Mathematical Statistics,Wiley,New York.J.D.H EALY(1987).A note on multivariate CuSum procedures.Technometrics,vol.29,pp.402-412.D.M.H IMMELBLAU(1970).Process Analysis by Statistical Methods.Wiley,New York.D.M.H IMMELBLAU(1978).Fault Detection and Diagnosis in Chemical and Petrochemical Processes. Chemical Engineering Monographs,vol.8,Elsevier,Amsterdam.W.G.S.H INES(1976a).A simple monitor of a system with sudden parameter changes.IEEE r-mation Theory,vol.IT-22,no2,pp.210-216.W.G.S.H INES(1976b).Improving a simple monitor of a system with sudden parameter changes.IEEE rmation Theory,vol.IT-22,no4,pp.496-499.D.V.H INKLEY(1969).Inference about the intersection in two-phase regression.Biometrika,vol.56,no3, pp.495-504.D.V.H INKLEY(1970).Inference about the change point in a sequence of random variables.Biometrika, vol.57,no1,pp.1-17.D.V.H INKLEY(1971).Inference about the change point from cumulative sum-tests.Biometrika,vol.58, no3,pp.509-523.D.V.H INKLEY(1971).Inference in two-phase regression.Jal American Statistical Association,vol.66, no336,pp.736-743.J.R.H UDDLE(1983).Inertial navigation system error-model considerations in Kalmanfiltering applica-tions.In Control and Dynamic Systems(C.T.Leondes,ed.),Academic Press,New York,pp.293-339.J.S.H UNTER(1986).The exponentially weighted moving average.Jal Quality Technology,vol.18,pp.203-210.I.A.I BRAGIMOV and R.Z.K HASMINSKII(1981).Statistical Estimation-Asymptotic Theory.Applications of Mathematics Series,vol.16.Springer,New York.R.I SERMANN(1984).Process fault detection based on modeling and estimation methods-A survey.Auto-matica,vol.20,pp.387-404.N.I SHII,A.I WATA and N.S UZUMURA(1979).Segmentation of nonstationary time series.Int.Jal Systems Sciences,vol.10,pp.883-894.J.E.J ACKSON and R.A.B RADLEY(1961).Sequential and tests.Annals Mathematical Statistics, vol.32,pp.1063-1077.B.J AMES,K.L.J AMES and D.S IEGMUND(1988).Conditional boundary crossing probabilities with appli-cations to change-point problems.Annals Probability,vol.16,pp.825-839.M.K.J EERAGE(1990).Reliability analysis of fault-tolerant IMU architectures with redundant inertial sen-sors.IEEE Trans.Aerospace and Electronic Systems,vol.AES-5,no.7,pp.23-27.N.L.J OHNSON(1961).A simple theoretical approach to cumulative sum control charts.Jal American Sta-tistical Association,vol.56,pp.835-840.N.L.J OHNSON and F.C.L EONE(1962).Cumulative sum control charts:mathematical principles applied to their construction and use.Parts I,II,III.Industrial Quality Control,vol.18,pp.15-21;vol.19,pp.29-36; vol.20,pp.22-28.432B IBLIOGRAPHY R.A.J OHNSON and M.B AGSHAW(1974).The effect of serial correlation on the performance of CUSUM tests-Part I.Technometrics,vol.16,no.1,pp.103-112.H.L.J ONES(1973).Failure Detection in Linear Systems.Ph.D.Thesis,Dept.Aeronautics and Astronautics, MIT,Cambridge,MA.R.H.J ONES,D.H.C ROWELL and L.E.K APUNIAI(1970).Change detection model for serially correlated multivariate data.Biometrics,vol.26,no2,pp.269-280.M.J URGUTIS(1984).Comparison of the statistical properties of the estimates of the change times in an autoregressive process.In Statistical Problems of Control,Issue65,Vilnius,pp.234-243(in Russian).T.K AILATH(1980).Linear rmation and System Sciences Series,Prentice Hall,Englewood Cliffs,NJ.L.V.K ANTOROVICH and V.I.K RILOV(1958).Approximate Methods of Higher Analysis.Interscience,New York.S.K ARLIN and H.M.T AYLOR(1975).A First Course in Stochastic Processes,2d ed.Academic Press,New York.S.K ARLIN and H.M.T AYLOR(1981).A Second Course in Stochastic Processes.Academic Press,New York.D.K AZAKOS and P.P APANTONI-K AZAKOS(1980).Spectral distance measures between gaussian pro-cesses.IEEE Trans.Automatic Control,vol.AC-25,no5,pp.950-959.K.W.K EMP(1958).Formula for calculating the operating characteristic and average sample number of some sequential tests.Jal Royal Statistical Society,vol.B-20,no2,pp.379-386.K.W.K EMP(1961).The average run length of the cumulative sum chart when a V-mask is used.Jal Royal Statistical Society,vol.B-23,pp.149-153.K.W.K EMP(1967a).Formal expressions which can be used for the determination of operating character-istics and average sample number of a simple sequential test.Jal Royal Statistical Society,vol.B-29,no2, pp.248-262.K.W.K EMP(1967b).A simple procedure for determining upper and lower limits for the average sample run length of a cumulative sum scheme.Jal Royal Statistical Society,vol.B-29,no2,pp.263-265.D.P.K ENNEDY(1976).Some martingales related to cumulative sum tests and single server queues.Stochas-tic Processes and Appl.,vol.4,pp.261-269.T.H.K ERR(1980).Statistical analysis of two-ellipsoid overlap test for real time failure detection.IEEE Trans.Automatic Control,vol.AC-25,no4,pp.762-772.T.H.K ERR(1982).False alarm and correct detection probabilities over a time interval for restricted classes of failure detection algorithms.IEEE rmation Theory,vol.IT-24,pp.619-631.T.H.K ERR(1987).Decentralizedfiltering and redundancy management for multisensor navigation.IEEE Trans.Aerospace and Electronic systems,vol.AES-23,pp.83-119.Minor corrections on p.412and p.599 (May and July issues,respectively).R.A.K HAN(1978).Wald’s approximations to the average run length in cusum procedures.Jal Statistical Planning and Inference,vol.2,no1,pp.63-77.R.A.K HAN(1979).Somefirst passage problems related to cusum procedures.Stochastic Processes and Applications,vol.9,no2,pp.207-215.R.A.K HAN(1981).A note on Page’s two-sided cumulative sum procedures.Biometrika,vol.68,no3, pp.717-719.B IBLIOGRAPHY433 V.K IREICHIKOV,V.M ANGUSHEV and I.N IKIFOROV(1990).Investigation and application of CUSUM algorithms to monitoring of sensors.In Statistical Problems of Control,Issue89,Vilnius,pp.124-130(in Russian).G.K ITAGAWA and W.G ERSCH(1985).A smoothness prior time-varying AR coefficient modeling of non-stationary covariance time series.IEEE Trans.Automatic Control,vol.AC-30,no1,pp.48-56.N.K LIGIENE(1980).Probabilities of deviations of the change point estimate in statistical models.In Sta-tistical Problems of Control,Issue83,Vilnius,pp.80-86(in Russian).N.K LIGIENE and L.T ELKSNYS(1983).Methods of detecting instants of change of random process prop-erties.Automation and Remote Control,vol.44,no10,Part II,pp.1241-1283.J.K ORN,S.W.G ULLY and A.S.W ILLSKY(1982).Application of the generalized likelihood ratio algorithm to maneuver detection and estimation.Proc.American Control Conf.,Arlington,V A,pp.792-798.P.R.K RISHNAIAH and B.Q.M IAO(1988).Review about estimation of change points.In Handbook of Statistics(P.R.Krishnaiah,C.R.Rao,eds.),vol.7,Elsevier,New York,pp.375-402.P.K UDVA,N.V ISWANADHAM and A.R AMAKRISHNAN(1980).Observers for linear systems with unknown inputs.IEEE Trans.Automatic Control,vol.AC-25,no1,pp.113-115.S.K ULLBACK(1959).Information Theory and Statistics.Wiley,New York(also Dover,New York,1968). K.K UMAMARU,S.S AGARA and T.S¨ODERSTR¨OM(1989).Some statistical methods for fault diagnosis for dynamical systems.In Fault Diagnosis in Dynamic Systems-Theory and Application(R.Patton,P.Frank,R. Clark,eds.).International Series in Systems and Control Engineering,Prentice Hall International,London, UK,pp.439-476.A.K USHNIR,I.N IKIFOROV and I.S AVIN(1983).Statistical adaptive algorithms for automatic detection of seismic signals-Part I:One-dimensional case.In Earthquake Prediction and the Study of the Earth Structure,Naouka,Moscow(Computational Seismology,vol.15),pp.154-159(in Russian).L.L ADELLI(1990).Diffusion approximation for a pseudo-likelihood test process with application to de-tection of change in stochastic system.Stochastics and Stochastics Reports,vol.32,pp.1-25.T.L.L A¨I(1974).Control charts based on weighted sums.Annals Statistics,vol.2,no1,pp.134-147.T.L.L A¨I(1981).Asymptotic optimality of invariant sequential probability ratio tests.Annals Statistics, vol.9,no2,pp.318-333.D.G.L AINIOTIS(1971).Joint detection,estimation,and system identifirmation and Control, vol.19,pp.75-92.M.R.L EADBETTER,G.L INDGREN and H.R OOTZEN(1983).Extremes and Related Properties of Random Sequences and Processes.Series in Statistics,Springer,New York.L.L E C AM(1960).Locally asymptotically normal families of distributions.Univ.California Publications in Statistics,vol.3,pp.37-98.L.L E C AM(1986).Asymptotic Methods in Statistical Decision Theory.Series in Statistics,Springer,New York.E.L.L EHMANN(1986).Testing Statistical Hypotheses,2d ed.Wiley,New York.J.P.L EHOCZKY(1977).Formulas for stopped diffusion processes with stopping times based on the maxi-mum.Annals Probability,vol.5,no4,pp.601-607.H.R.L ERCHE(1980).Boundary Crossing of Brownian Motion.Lecture Notes in Statistics,vol.40,Springer, New York.L.L JUNG(1987).System Identification-Theory for the rmation and System Sciences Series, Prentice Hall,Englewood Cliffs,NJ.。
JDSU T-BERD 6000 光纤测试平台说明书

T-BERD ®6000Compact Optical Test Platform Key Features •Compact,lightweight,and highly integrated platform•More than 40 application modules already supported formultimode and single-mode•Built-in VFL,power meter,LTS,ORL,and video inspectionscope options •Choose from IL/ORL,OTDR,PMD,CD,AP and/or WDMplug-ins•Exceeds Telcordia specifications for ruggedness,droptesting,and extended battery life•Compatible with plug-in modules from the MTS-51001and T-BERD 8000The JDSU T-BERD 6000 is a highly integrated test platform designed for all phases of the fiber network life cycle.It provides field service technicians with the highest levels of performance and upgradeability on the market today.The modular design of the T-BERD 6000 offers an extensive portfolio of test functionality with over 40 different fiber modules supporting a wide range of applications.The versatility of the T-BERD 6000 allows technicians to standardize using one type of test equipment and then introduce new testing capabilities in the field without incurring additional training or device costs.The T-BERD 6000 is compatible with our existing fiber module product line,so technicians can exchange plug-in modules between the T-BERD-8000 Scalable Optical Test Platform and the T-BERD 6000,in the field and without the need for additional tools.To ensure the highest level of return on your capital investment for test equipment,an extension allows you to upgrade existing OTDR modules from the MTS-5100 for use with the T-BERD 6000.To ensure the highest-level return on investment for your test equipment,upgradeexisting optical time domain reflectometer (OTDR) modules from the MTS-5100(with an extension) for use with the T-BERD 6000.Compatible with the M T S-5100 line of MM,SR,DR,HD,and VHD OTDR modulesApplications•Performs multimode andsingle-mode OTDR and optical losstest (bidirectional)•Conducts connector inspection andcontinuity testing•Finds faults and identifies traffic•Tests FTTx/PON and CWDMnetworks•Performs fiber dispersion testing(PMD/CD/AP) for 10G/10GE/40G•Allows for use of talk set/data portfor automated end-to-endcommunication and unit control•Generates proof-of-performancereports P r o vided b vided by y : com (800)40404-A -ATE TEC CAd Advanced vanced T Test est E quipment Rentals ®Microphone(4) Molded Bumpers(7) Soft Keys(Context Sensitive)(5) Direct Access Keysand Start/StopNavigation Key PadRemovable High-CapacityLi Ion Battery (8-hour battery life)T-BERD 6000 Front Panel Ideal for Field TestingThe T-BERD 6000 is a highly integrated platform with a single module slot and the option to extend internal memory up to 1 gigabyte.The platform features an intuitive graphical user interface (GUI) shown on a large 8.4 inch transreflective color display (with an optional touchscreen) to improve viewing under any condition.The high capacity Lithium ion battery adds extended life.Other features include an optional video inspection scope (via USB port),and optional built-in optical test functions,such as a visual fault locator (VFL),power meter,optical return loss (ORL) and loss test sets (LTS).The T-BERD 6000 also has a built-in optical talk set option for communicating and controlling remote units along the fiber,and it can transfer data fast using the USB or Ethernet port.8.4 in Indoor/Outdoor TFT Color Display,Touchscreen ConfigurablePower Meter Visual Fault Locator AC InputHeadsetOptical Talk Set/Light Source/ORL High-SpeedEthernet Port (2) USB Ports (Video Inspection Scope Option)T-BERD 6000 Top SideOverview of Fiber Optic Applications Compact and Highly IntegratedThe versatility of the T-BERD 6000 allows it to address premises to long-haul network s comprising new technologies,such as various fiber network s (FTTx),remote optical add/drop multiplexers (ROADMs),and 40 G.–Built-in VFL,laser source power meter,LTS,talk set/data,and video inspection scope options (simultaneously)–Bidirectional insertion loss (IL) and ORL capabilities combined in one module –OTDR and chromatic dispersion (CD) capabilities combined in one module –Polarization mode dispersion (PMD),wave division multiplexing (WDM),and attenuation profile (AP) capabilities combined in one module –PMD,CD,and AP capabilities combined in one module Wide Range of Test Applications–10 GigE local area network (LAN) qualification Solution:T-BERD 6000 with the unique universal SRL 850/1300/1310/1550/1625 nmOTDR Module–End-to-end connectivity on point-to-point network s,including sectionalized testing on a passive optical network (PON) (without a splitter)Solution:T-BERD 6000 with the VSRe,SRe,MR OTDR module at 1310/1550 nm –End-to-end connectivity on PONs,including splitter qualification Solution:T-BERD 6000 with the MR,LR,or VLR at 1310/1490/1550 nm OTDR moduleAdd optional VFL,power meter,and video inspection scope–In-service maintenance and troubleshooting without service disruption Solution:T-BERD 6000 with the filtered LR OTDR module at 1625 nm –End-to-end connectivity and fiber splice qualificationSolution:T-BERD 6000 with the MR,LR,or VLR at 1310/1550/1625 nm OTDR module Add optional VFL,power meter,and video inspection scope LAN/WAN Premises Metro/Core NetworksFTTx/Access Networks4–End-to-end connectivity and fiber splice qualification Solution:T-BERD 6000 with the UHD OTDR module at 1310/1550/1625 nmDynamic range of 50 dB available at 1550 nm–Characterize fiber in high-speed transmission systems for loss/dispersion Solution:T-BERD 6000 with the PMD/CD/AP ,ODTR,and OFI module–Characterize fiber and prove suitability to carry multiple channels (water peak)Solution:T-BERD 6000 with the VLR OTDR module at 1383 nmAdd the combined PMD/WDM/SA or CDWM OTDR module–New technologies developed in the futureSolution:T-BERD 6000 with the new JDSU field-upgradeable application module 10G/40G Fiber Characterization CWDM/DWDM Modular PlatformUltralong-Haul Networks Modular designOTDR and IL/ORL TestingA Wide Range of OTDR ModulesThe JDSU OTDR plug-in module family provides a wide range of high-performance OTDRs.Over 40 field-interchangeable modules are compatible withthe T-BERD 6000 for testing and troubleshooting any multimode or single-mode network.The OTDR family includes six lines of OTDRs featuring:–New wavelengths to cover 1383 nm (CWDM) and 1490 nm (FTTx) –Highest dynamic range up to 50 dB–Shortest dead zones down to 0.5 m in multimode and 0.8 m in singlemode–Fastest scan speed at 0.1 s in real-time modeFrom Simple Fault Locator to Expert OTDR…The fault locator boosts productivity in the field by providing:The expert mode offers high-level trace analysis possibilities,mak ing yourT-BERD 6000 platform a powerful instrument for commissioning and trouble-shooting by offering:-Manual settings (pulse,acquisition time,resolution,distance range)-Manual addition and deletion of events-Manual slopes,splices,and reflectances measurementIndustry leader for dynamicrange with 50 dB Revolutionary 50 cm dead zone automationloss,and ORL measurementsFigure 2 Fault locator modeIdeal for End-to-End CommissioningOTDR bidirectional testing is required to obtain true and accurate splice loss readings.JDSU has developed an innovative automatic bidirectional analysis function that is integrated directly into the T-BERD 6000 platform,saving at least 50 percent of the time required for traditional bidirectional analysis.–Offers communication between two units via the link under test to set up the same optimized acquisition parameters–Displays and saves automatic acquisitions in both directions on both units –Eliminates operator errorUnique to the market:Fully automatic bidirectionalacquisition and analysisLocalT-BERD 6000T-BERD 6000Remote Figure 3Bidirectional OTDR measurement CWDM OTDR ModulesThe CWDM OTDR module allows in-service OTDR measurements at International Telecommunications Union (ITU-T) G.694.2 CWDM wavelengths.This solution was developed to help network operators and dark fiber providers characterize,maintain,and troubleshoot CWDM systems from short- to medium-haul fiber networks.Figure 4 Qualification of a CWDM networkFTTx/PON In-Service ModulesTo avoid interrupting customer traffic (in-service testing) of B/G/E-PON networks the filtered OTDR module performs an out-of-band test using 1625 nm wavelength.Insertion Loss and Optical Return Loss Testing–Measures bidirectional IL,ORL,and fiber length –Offers one-button automated testing –Choose three wavelengths from 1310,1490,1550,and 1625 nm –Compatible with the OFI-2000 Multifunction Loss Test SetCD,PMD,AP,and WDM TestingThe T-BERD 6000 enables CD and PMD measurements to identify fiber viability for very high-speed transmission systems.It also enables WDM and AP tests to validate the link compatibility with DWDM system implementation.Polarization Mode Dispersion Testing–Fast and accurately measures PMD delay,PMD coefficient,andsecond-order values–Offers high dynamic range (up to 65 dB) dedicated for metropolitan,long haul, and very long haul fiber optic links–Offers shock- and vibration-proof design (with no moving parts)–Allows for measurement through multiple amplifiers–Provides statistics and long-term monitoringChromatic Dispersion Testing - OTDR-Based Method–Requires access to only one end of the fiber–Offers dynamic range (up to 120 km) dedicated for any metropolitan fiber optic links–Includes acquisition points around 1310,1480,1550,and 1625 nm for accurate CD from 1260 to 1650 nm–Integrates a four-wavelength OTDR and light source–Provides sectional analysis capability for troubleshooting–Offers shock- and vibration-proof design (with no moving parts)9T-BERD 6000 COMPACT OPTICAL TEST PLATFORMChromatic Dispersion Testing - Phase-Shift Method–Offers high dynamic range (up to 55 dB) dedicated for metropolitan,long haul, and very long haul fiber optic links–Provides full wavelength range characterization (1260 to 1640 nm)–Allows for measurement through multiple amplifiers–Offers shock- and vibration-proof design (with no moving parts)Attenuation Profile Testing–Provides total loss and dB/km values for full band testing (1260 to 1640 nm)–Allows CDWM and dense wavelength division multiplexing (DWDM) transmission band characterization–Provides water peak (1383 nm area) characterization–Offers shock- and vibration-proof design (with no moving parts)–Combined with WDM and PMD functions or with CD and PMD functionsDWDM Maintenance Testing–Measures channel level,power,and wavelength in the S,C,and L bands–Provides the most compact DWDM test solution that measures optical signal-to-noise ratio (OSNR)–Tests wavelengths from 1260 to 1640 nm or 1485 to 1640 nm–Offers high wavelength accuracy–Provides statistics and long-term monitoring–Offers shock- and vibration-proof design (with no moving parts)10Generate cable acceptance reportsReport single test resultsP rofessional acceptance test reports OTDR trace report Options and AccessoriesGreater Productivity with CommunicationsWith limited telephone line and cell phone coverage during fiber testing,the T-BERD 6000 offers a built-in optical talk set option for permanent communication between test technicians.Near- and far-end technicians can communicate with each other,avoiding many of the testing mistakes that can prove costly if another truck roll is required to fix a problem.For bidirectional testing that requires both the near- and far-end units to acquire data,the Data mode on the optional talk set synchronizes data acquisition for both units during OTDR testing and retrieves test results for pass/fail analysis.–Provides 45 dB optical talk set–Provides file transfer capability through the fiber–Provides remote control of the far-end unit–Provides a talk set compatible with the OFI-2000 and with the OTS-55 Optical Talk Set stand-alone unitEffective Test Report GenerationTransfer data and generate comprehensive reports using JDSU FiberTrace and FiberCable analysis software.–Generate proof-of-performance reports with a high degree of customization –Create dedicated tables for each test result (OTDR,CD,PMD,and ORL)–Provides pass/fail indicators for quick analysis of problem areas –Identifies macro bends and provides fault report summary11Comprehensive Line of AccessoriesA wide range of available accessories provide technicians with everything needed to benefit from the complete testing capabilities of the of the T-BERD 6000.Join the T-BERD Family of Optical Test SolutionsBased on the same graphical user interface (GUI) and file formats,the T-BERD 6000,T-BERD 6000A,and the T-BERD 8000 form a family of solutions for high-performance field testing.In addition,the fiber application plug-in modules are field interchangeable with the T-BERD 6000,T-BERD 6000A,and the T-BERD 8000,ensuring maximum flexibility and investment protection.The T-BERD 6000 can house one fiber application plug-in module.The T-BERD 6000A with the Multi-Services Application Module (MSAM) offers Ethernet and SONET/SDH testing at line rates from 10 Mb/s up to 10 Gb/s,as well as the ability to verify and troubleshoot higher-layer IP video,Layer 4 UDP/PCP ,FTP ,and HTTP .The T-BERD 8000 can house multiple modules simultaneously,enabling the perform-ance of almost any combination of network test functions in a single unit.In addition,the T-BERD 8000 also offers:–DWDM turn-up testing–Dual-port optical spectrum analysis–DWDM channel isolation for BERT analysis –E1/T1 to 10G BERT analysis–10/100/1000/1G/10G Ethernet testingT-BERD 6000 LITE Compact OTDR T-BERD 6000Compact Optical Test Platform T-BERD 6000ACompact Network Test Platform T-BERD 8000Scalable Optical Test PlatformThe T-BERD 6000 with the optional mouse,keyboard,battery,headset,AC/DC adapter charger,and video inspection scopeT-BERD 8000 field-scalable optical test platformView clean and dirty fiber end faces with the connector inspection option.Test & Measurement Regional SalesProduct specifications and descriptions in this document subject to change without notice.© 2008 JDS Uniphase Corporation November 200830162566 000 1108 TB6000.DS.FOP .TM.AESpecifications for Typical 25°CDisplayTFT color,8.4 in LCD,800 x 600,high-visibility (standard)Touchscreen,TFT color,8.4 in LCD,800 x 600,high-visibility (optional)Storage and I/O Interfaces Internal memory 1000 test results Extended memory (optional)Minimum 1 GB (optional)2x USB V1.1,1x RJ45 Ethernet Power Supply Battery type Standard removable Li-ion batteries AC/DC adapter Input 100–240 V,50–60 Hz,Output 19 V DC/3.1 AOperation time Up to 11 hrs with standard display,Telcordia GR-196-CORESize and WeightMainframe with one plug-in module and battery (L x H x W)285 x 195 x 93 mm(11.2 x 7.7 x 3.7 in)Mainframe only (without battery and module) 2.4 kg (5.3 lb)Mainframe (with one plug-in module and battery) 3.4 kg (7.5 lb)Environmental SpecificationsOperating temperature range on mains (no options)–20 to +50°C (–4 to 122°F)Operating temperature range (all options)0 to +40°C(32 to 104°F)Storage temperature range –20 to +60°C (–4 to 140°F)Humidity,non-condensing 95%Base Unit Optical Interfaces (optional)Power Meter Power level+10 to –60 dBm Calibrated wavelengths 850,1310,and 1550 nm Connector type Universal push/pull (UPP)Talkset Wavelength 1550 nm ±20 nmDynamic range 45 dBFunction With data/file transferLaser safety Class 1M laser Connector typeField interchangeableOptical Return Loss Selectable wavelength 1310 / 1550 nm Measurement range 0 dB to 45 dBMeasurement uncertainty ±1 dB Display resolution0.01 dBVisual Fault Locator Wavelength 635 nm ±15 nm Output power level <1 mW Laser safety Class 2 laser Connector type Universal push/pull (UPP)Continuous Wave Light Source Wavelengths (selection)1310,1550,and 1625 nm Output power level –3.5 dBm Stability in 15 min ±0.02 dB Stability in 8 hrs ±0.2 dB Laser safety Class 1M laser Connector type Field interchangeable Video Inspection Scope (via USB)Magnification 250X and 400X,through the USB portBase InstrumentT-BERD 6000 platform with high-visibilitycolor display and battery packTB6000T-BERD 6000 platform with high-visibility touchscreen color display and battery pack TB6000T Extended memory (1 GB)E60EXTMEM VFL with 2.5 mm UPP E80VFL Optical talk set E80TS Optical power meter with UPP connector (2.5 mm provided as standard)E80PM Optical loss test set 1550/1625 nm with talk set E8029LTSTS Optical loss test set with talk set (1310/1550/1625 nm)E8036LTSTS Combined LTS and ORL with talk set(1310/1550 nm )E8026LTSTSORL Bidirectional OTDR acquisitionoption for single-mode moduleE80bidir Quick capture video microscope,200x/400x with USB converterEFSCOPE400AccessoriesCigarette lighter power adapterE80lighter Additional Li-Ion rechargeable batteryE60LiIon Wrap around carrying case for 6000 platformESCASE5Application SoftwareOptical FiberTrace software (for post-analysis)EOFS100Optical FiberCable software(for acceptance report generation)EOFS200Optical connectors for the loss test set and talk set options (connector must be of the same type)Field replaceable connectors:EUNIPCFC,EUNIPCSC,EUNIPCST,EUNIPCDIN,EUNIPCLC,EUNIAPCFC,EUNIAPCSC,EUNIAPCST,EUNIAPCDIN,EUNIAPCLCPlease refer to the separate module datasheets for detailed specifications.。
A note on negligible functions

快速治口臭的最好方法口臭是一种常见的口腔健康问题,给人们的生活和社交带来了很多困扰。
许多人都希望能够找到一种快速有效的方法来治疗口臭,以恢复自信和舒适感。
下面将介绍一些治疗口臭的最好方法,希望对您有所帮助。
首先,保持良好的口腔卫生习惯是治疗口臭的基础。
定期刷牙、使用牙线和漱口水是非常重要的。
刷牙可以有效清除口腔中的食物残渣和细菌,使用牙线可以清洁牙齿间的难以触及的部位,漱口水可以杀灭口腔中的细菌并保持口气清新。
此外,定期洁牙也是保持口腔清洁的重要手段,可以有效预防口臭的产生。
其次,注意饮食习惯对口臭的影响也是非常重要的。
食物中的大蒜、洋葱等会在消化后释放出刺激性气味物质,而过多的咖啡因和酒精也会对口气产生不良影响。
因此,适当控制这些食物的摄入量,多吃一些清新口气的食物,如苹果、胡萝卜等,对改善口臭有很大帮助。
另外,定期去口腔科检查也是治疗口臭的重要手段。
口腔科医生可以帮助您检查口腔健康状况,及时发现口腔问题并进行治疗。
有些口腔疾病,如牙龈炎、牙周炎等,如果不及时治疗,会导致口腔异味,甚至影响全身健康。
此外,定期饮用温水也是改善口臭的好方法。
饮用温水可以有效促进口腔血液循环,清洗口腔细菌,并且可以帮助口腔黏膜保持湿润,减少口腔异味的产生。
最后,保持良好的生活习惯也是治疗口臭的关键。
戒烟限酒、保持充足的睡眠、减少压力等都对口臭的改善有积极作用。
因为吸烟和酗酒会导致口腔内细菌增加,口腔黏膜受损,从而产生口臭。
而长期的睡眠不足和过度的压力也会影响口腔健康,导致口臭问题加重。
总之,治疗口臭需要综合考虑口腔卫生、饮食习惯、口腔健康和生活习惯等多个方面的因素。
希望以上方法对您治疗口臭有所帮助,祝您拥有清新自信的口气!。
IEEE期刊缩写

1IEEE Abbreviations for Transactions, Journals, LettersNOTE: * denotes past acronyms/abbreviations of journals (used for pre-1988 publications).Publication Acronym Reference Abbreviation IEEE T RANSACTIONS ON A DVANCED P ACKAGING ADVP IEEE Trans. Adv. Packag.CPMTB * IEEE Trans. Compon., Packag., Manuf. Technol. B * (1994–1998) IEEE T RANSACTIONS ON A EROSPACE AND E LECTRONIC S YSTEMS AES IEEE Trans. Aerosp. Electron. Syst. ANE* IEEE Trans. Aeronaut. Navig. Electron.* ANE* IEEE Trans. Aerosp. Navig. Electron.* AS* IEEE Trans. Aerosp.* MIL* IEEE Trans. Mil. Electron.* AE* IEEE Trans. Airborne Electron.* IEEE T RANSACTIONS ON A NTENNAS AND P ROPAGATION AP IEEE Trans. Antennas Propag. IEEE A NTENNAS AND W IRELESS P ROPAGATION L ETTERS LAWP IEEE Antennas Wireless Propag. Lett. IEEE T RANSACTIONS ON A PPLIED S UPERCONDUCTIVITY ASC IEEE Trans. Appl. Supercond. IEEE T RANSACTIONS ON A UTOMATIC C ONTROL AC IEEE Trans. Autom. Control IEEE T RANSACTIONS ON A UTOMATION S CIENCE AND E NGINEERINGASE IEEE Trans. Autom. Sci. Eng. (from July 2004) IEEE T RANSACTIONS ON A UTONOMOUS M ENTAL D EVELOPMENT AMD IEEE Trans. Auton. Mental Develop. IEEE R EVIEWS IN B IOMEDICAL E NGINEERING RBME IEEE Rev. Biomed. Eng. IEEE T RANSACTIONS ON B IOMEDICAL E NGINEERING BME IEEE Trans. Biomed. Eng. BME* IEEE Trans. Bio-Med. Eng.* BME* IEEE Trans. Bio-Med. Electron.* PGME* IEEE Trans. Med. Electron.* IEEE T RANSACTIONS ON B IOMEDICAL C IRCUITS AND S YSTEMS BCAS IEEE Trans. Biomed. Circuits Syst. IEEE T RANSACTIONS ON B ROADCASTING BC IEEE Trans. Broadcast. BC* IEEE Trans. Broadcast. Technol.* IEEE T RANSACTIONS ON C IRCUITS AND S YSTEMS —I: R EGULAR P APERS CSI IEEE Trans. Circuits Syst. I, Reg. Papers IEEE T RANSACTIONS ON C IRCUITS AND S YSTEMS —II: E XPRESS B RIEFS CSII IEEE Trans. Circuits Syst. II, Exp. Briefs IEEE T RANSACTIONS ON C IRCUITS AND S YSTEMS —I: F UNDAMENTAL T HEORY AND A PPLICATIONS CAS1* IEEE Trans. Circuits Syst. I, Fundam. Theory Appl. (1993–2003) IEEE T RANSACTIONS ON C IRCUITS AND S YSTEMS —II: A NALOG AND D IGITAL S IGNAL P ROCESSING CAS2* IEEE Trans. Circuits Syst. II, Analog Digit. Signal Process.(1993–2003) CAS* IEEE Trans. Circuits Syst.* (1974–1992) CT* IEEE Trans. Circuit Theory * (until 1973) IEEE T RANSACTIONS ON C IRCUITS AND S YSTEMS FOR V IDEO T ECHNOLOGY CSVT IEEE Trans. Circuits Syst. Video Technol. IEEE T RANSACTIONS ON C OMMUNICATIONS COM IEEE Trans. Commun. COM*IEEE Trans. Commun. Technol.* (through 1971) IEEE C OMMUNICATIONS L ETTERS COMML IEEE Commun. Lett. IEEE T RANSACTIONS ON C OMPONENTS AND P ACKAGING T ECHNOLOGY CAPT IEEE Trans. Compon. Packag. Technol.CPMTA* IEEE Trans. Compon., Packag., Manuf. Technol. A * (1994–1998)CHMT* IEEE Trans. Compon., Hybrids, Manuf. Technol.* (1978–1993)MFT* IEEE Trans. Manuf. Technol.* (1972–1977)PHP* IEEE Trans. Parts, Hybrids, Packag.* (June 1971–1977) PMP* IEEE Trans. Parts, Mater., Packag.* (until 1971)Publication Acronym Reference AbbreviationIEEE T RANSACTIONS ON C OMPUTER-A IDED D ESIGN OFI NTEGRATED C IRCUITS AND S YSTEMS CAD IEEE Trans. Comput.-Aided Design Integr. Circuits Syst. IEEE T RANSACTIONS ON C OMPUTATIONAL I NTELLIGENCEAND A RTIFICIAL I NTELLIGENCE IN G AMES CIAIG IEEE Trans. Comput. Intell. AI in Games.IEEE C OMPUTER A RCHITECTURE L ETTERS IEEE Comput. Archit. Lett.IEEE T RANSACTIONS ON C ONSUMER E LECTRONICS CE IEEE Trans. Consum. Electron.IEEE T RANSACTIONS ON C ONTROL S YSTEMS T ECHNOLOGY CST IEEE Trans. Control Syst. Technol.IEEE T RANSACTIONS ON D EVICE AND M ATERIALSR ELIABILITY DMR IEEE Trans. Device Mater. Rel.IEEE T RANSACTIONS ON D IELECTRICS AND E LECTRICALI NSULATION DEI IEEE Trans. Dielectr. Electr. Insul.EI* IEEE Trans. Electr. Insul.*(until 1993)IEEE/OSA J OURNAL OF D ISPLAY T ECHNOLOGY DT J. Display Technol.IEEE T RANSACTIONS ON E DUCATION E IEEE Trans. Educ.IEEE T RANSACTIONS ON E LECTROMAGNETICC OMPATIBILITY EMC IEEE Trans. Electromagn. Compat.RFI* IEEE Trans. Radio Freq. Interference*IEEE T RANSACTIONS ON E LECTRON D EVICES ED IEEE Trans. Electron DevicesIEEE E LECTRON D EVICE L ETTERS EDL IEEE Electron Device Lett.IEEE T RANSACTIONS ON E LECTRONICS P ACKAGINGM ANUFACTURING EPM IEEE Trans. Electron. Packag. Manuf.CPMTC* IEEE Trans. Compon., Packag., Manuf.Technol. C* (1996–1998)IEEE E MBEDDED S YSTEMS L ETTERS ES IEEE Embedded Syst. Lett.IEEE T RANSACTIONS ON E NERGY C ONVERSION EC IEEE Trans. Energy Convers.IEEE T RANSACTIONS ON E NGINEERING M ANAGEMENT EM IEEE Trans. Eng. Manag.IEEE T RANSACTIONS ON E VOLUTIONARY C OMPUTATION EVC IEEE Trans. Evol. Comput.IEEE T RANSACTIONS ON F UZZY S YSTEMS FUZZ IEEE Trans. Fuzzy Syst.IEEE T RANSACTIONS ON G EOSCIENCE AND R EMOTES ENSING GRS IEEE Trans. Geosci. Remote Sens.IEEE G EOSCIENCE AND R EMOTE S ENSING L ETTERS GRSL IEEE Geosci. Remote Sens. Lett.IEEE T RANSACTIONS ON I MAGE P ROCESSING IP IEEE Trans. Image Process.IEEE T RANSACTIONS ON I NDUSTRIAL E LECTRONICS IE IEEE Trans. Ind. Electron.IEEE T RANSACTIONS ON I NFORMATION F ORENSICS ANDS ECURITY IFS IEEE Trans. Inf. Forensics SecurityIEEE T RANSACTIONS ON I NDUSTRIAL I NFORMATICS IINF IEEE Trans Ind. Informat.IEEE T RANSACTIONS ON I NDUSTRY A PPLICATIONS IA IEEE Trans. Ind. Appl.IEEE T RANSACTIONS ON I NFORMATION T ECHNOLOGYIN B IOMEDICINE ITB IEEE Trans. Inf. Technol. Biomed.IEEE T RANSACTIONS ON I NFORMATION T HEORY IT IEEE Trans. Inf. TheoryIEEE T RANSACTIONS ON I NSTRUMENTATION ANDM EASUREMENT IM IEEE Trans. Instrum. Meas.I, PGI* IEEE Trans. Instrum.*IEEE T RANSACTIONS ON I NTELLIGENT T RANSPORTATIONS YSTEMS ITS IEEE Trans. Intell. Transp. Syst.IEEE T RANSACTIONS ON K NOWLEDGE AND D ATAE NGINEERING KDE IEEE Trans. Knowl. Data Eng.IEEE/OSA J OURNAL OF L IGHTWAVE T ECHNOLOGY LT J. Lightw. Technol.IEEE T RANSACTIONS ON M AGNETICS MAG IEEE Trans. Magn.IEEE/ASME T RANSACTIONS ON M ECHATRONICS MECH IEEE/ASME Trans. MechatronicsIEEE T RANSACTIONS ON M EDICAL I MAGING MI IEEE Trans. Med. Imag.IEEE/ASME J OURNAL OF M ICROELECTROMECHANICALS YSTEMS MEMS J. Microelectromech. Syst.IEEE M ICROWAVE AND G UIDED W AVE L ETTERS MGWL IEEE Microw. Guided Wave Lett. (until 2002)IEEE M ICROWAVE AND W IRELESSC OMPONENTS L ETTERS LMWC IEEE Microw. Wireless Compon. Lett.IEEE T RANSACTIONS ON M ICROWAVE T HEORY ANDMTT IEEE Trans. Microw. Theory Tech.T ECHNIQUESPublication Acronym Reference AbbreviationIEEE T RANSACTIONS ON M ULTIMEDIA MM IEEE Trans. MultimediaIEEE T RANSACTIONS ON M OBILE C OMPUTING MC IEEE Trans. Mobile Comput.IEEE T RANSACTIONS ON M ULTIMEDIA MM IEEE Trans. MultimediaIEEE T RANSACTIONS ON N ANO B IOSCIENCE NB IEEE Trans. Nanobiosci.IEEE T RANSACTIONS ON N ANOTECHNOLOGY NANO IEEE Trans. Nanotechnol.IEEE T RANSACTIONS ON N ETWORK AND S ERVICEM ANAGEMENT NSM IEEE Trans. Netw. Service Manag.IEEE/ACM T RANSACTIONS ON N ETWORKING NET IEEE/ACM Trans. Netw.IEEE T RANSACTIONS ON N EURAL N ETWORKS NN IEEE Trans. Neural Netw.IEEE T RANSACTIONS ON N UCLEAR S CIENCE NS IEEE Trans. Nucl. Sci.IEEE T RANSACTIONS ON N EURAL S YSTEMS ANDR EHABILITATION E NGINEERING NSRE IEEE Trans. Neural Syst. Rehabil. Eng.IEEE T RANSACTIONS ON R EHABILITATION E NGINEERING RE* IEEE Trans. Rehabil. Eng.*(1993–2000)IEEE J OURNAL OF O CEANIC E NGINEERING OE IEEE J. Ocean. Eng.IEEE J OURNAL OF O PTICAL C OMMUNICATIONS ANDN ETWORKING OCN IEEE J. Opt. Commun. Netw.IEEE T RANSACTIONS ON P ARALLEL AND D ISTRIBUTEDS YSTEMS PDS IEEE Trans. Parallel Distrib. Syst.IEEE T RANSACTIONS ON P ATTERN A NALYSIS ANDM ACHINE I NTELLIGENCE PAMI IEEE Trans. Pattern Anal. Mach. Intell.IEEE P HOTONICS T ECHNOLOGY L ETTERS PTL IEEE Photon. Technol. Lett.IEEE P HOTONICS J OURNAL PJ IEEE Photon. J.IEEE T RANSACTIONS ON P LASMA S CIENCE PS IEEE Trans. Plasma Sci.IEEE T RANSACTIONS ON P OWER A PPARATUS AND S YSTEMS PAS* IEEE Trans. Power App. Syst.*(through 1985)IEEE T RANSACTIONS ON P OWER D ELIVERY PWRD IEEE Trans. Power Del.IEEE T RANSACTIONS ON P OWER E LECTRONICS PEL IEEE Trans. Power Electron.IEEE P OWER E LECTRONICS L ETTERS LPEL IEEE Power Electron Lett.IEEE T RANSACTIONS ON P OWER S YSTEMS PWRS IEEE Trans. Power Syst.IEEE J OURNAL OF P RODUCT S AFETY E NGINEERING IEEE J. Product Safety Eng.IEEE T RANSACTIONS ON P ROFESSIONAL C OMMUNICATION PC IEEE Trans. Prof. Commun.IEEE J OURNAL OF Q UANTUM E LECTRONICS QE IEEE J. Quantum Electron.IEEE T RANSACTIONS ON R ELIABILITY R IEEE Trans. Rel.IEEE T RANSACTIONS ON R OBOTICS RO IEEE Trans. Robot..IEEE T RANSACTIONS ON R OBOTICS AND A UTOMATION RA* IEEE Trans. Robot. Autom.*(1989–June 2004)RA* IEEE J. Robot. Autom.* (1985–1988)IEEE J OURNAL OF S ELECTED T OPICS IN A PPLIED E ARTHO BSERVATIONS IN R EMOTE S ENSING STAERS IEEE J. Sel. Topics Appl. Earth Observ. IEEE J OURNAL ON S ELECTED A REAS IN C OMMUNICATIONS SAC IEEE J. Sel. Areas Commun.IEEE J OURNAL OF S ELECTED T OPICS IN Q UANTUME LECTRONICS STQE IEEE J. Sel. Topics Quantum Electron.IEEE J OURNAL OF S ELECTED T OPICS IN S IGNALP ROCESSING STSP IEEE J. Sel. Topics Signal Process.IEEE T RANSACTIONS ON S EMICONDUCTORM ANUFACTURING SM IEEE Trans. Semicond. Manuf.IEEE S ENSORS J OURNAL SEN IEEE Sensors J.IEEE T RANSACTIONS ON S IGNAL P ROCESSING SP IEEE Trans. Signal Process.ASSP* IEEE Trans. Acoust., Speech, SignalProcess. * (1975–1990)AU* IEEE Trans. Audio Electroacoust.(until 1974)IEEE S IGNAL P ROCESSING L ETTERS SPL IEEE Signal Process. Lett.IEEE S YSTEMS J OURNAL SYSJ IEEE Syst. J.IEEE T RANSACTIONS ON S OFTWARE E NGINEERING SE IEEE Trans. Softw. Eng.IEEE J OURNAL OF S OLID-S TATE C IRCUITS SSC IEEE J. Solid-State CircuitsIEEE T RANSACTIONS ON S PEECH AND A UDIO P ROCESSING SAP IEEE Trans. Speech Audio Process.IEEE T RANSACTIONS ON S YSTEMS,M AN, ANDC YBERNETICS—P ART A:S YSTEMS AND H UMANS SMCA IEEE Trans. Syst., Man, Cybern. A, Syst., HumansPublication Acronym Reference AbbreviationIEEE Transactions on Sustainable Energy IEEE T RANSACTIONS ON S YSTEMS,M AN, ANDC YBERNETICS—P ART B:C YBERNETICS STESMCBIEEE Trans. Sustainable EneryIEEE Trans. Syst., Man, Cybern. B, Cybern.IEEE T RANSACTIONS ON S YSTEMS,M AN, ANDC YBERNETICS—P ART C:A PPLICATIONS AND R EVIEWS SMCC IEEE Trans. Syst., Man, Cybern. C, Appl. Rev. SMC* IEEE Trans. Syst., Man, Cybern.*(1971–1995)SSC* IEEE Trans. Syst. Sci. Cybern.*(through 1970)IEEE T RANSLATION J OURNAL ON M AGNETICS IN J APAN TJMJ IEEE Transl. J. Magn. Jpn.MMS* IEEE Trans. Man-Mach. Syst.*(through 1970)HFE* Hum. Factors Electron. *(through 1968)IEEE J OURNAL ON T ECHNOLOGY IN C OMPUTER A IDEDD ESIGN JTCAD IEEE J. Technol. Computer Aided Design IEEE T RANSACTIONS ON U LTRASONICS,F ERROELECTRICS,AND F REQUENCY C ONTROL UFFC IEEE Trans. Ultrason., Ferroelectr.,Freq. ControlSU* IEEE Trans. Sonics Ultrason.*(through 1985)UE* IEEE Trans. Ultrason. Eng.*PGUE* IEEE Trans. Ultrason. Eng.*IEEE T RANSACTIONS ON V EHICULAR T ECHNOLOGY VT IEEE Trans. Veh. Technol.VC* IEEE Trans. Veh. Commun.*IEEE T RANSACTIONS ON V ERY L ARGE S CALEI NTEGRATION (VLSI) S YSTEMS VLSI IEEE Trans. Very Large Scale Integr. (VLSI) Syst. IEEE T RANSACTIONS ON V ISUALIZATION ANDC OMPUTER G RAPHICS VCG IEEE Trans. Vis. Comput. GraphicsIEEE T RANSACTIONS ON W IRELESS C OMMUNICATIONS WC IEEE Trans. Wireless Commun.P ROCEEDINGS OF THE IEEE Proc. IEEEProc. IRE* (through 1962)IEEE EDITORIAL STYLE MANUAL 5List of IEEE MagazinesMagazines Reference AbbreviationIEEE Aerospace and Electronics Systems Magazine IEEE Aerosp. Electron. Syst. Mag.IEEE Annals of the History of Computing IEEE Ann. Hist. Comput.IEEE Antennas and Propagation Magazine IEEE Antennas Propag. Mag.IEEE ASSP Magazine (1984–1990) IEEE ASSP Mag.IEEE Circuits and Systems Magazine (1979–1984) IEEE Circuits Syst. Mag.IEEE Circuits and Devices Magazine (1985–present) IEEE Circuits Devices Mag.IEEE Communications Society Magazine (through 1978) IEEE Commun. Soc. Mag.IEEE Communications Magazine (1979–present) IEEE Commun. Mag.IEEE Computational Intelligence Magazine IEEE Comput. Intell. Mag.IEEE Computational Science and Engineering IEEE Comput. Sci. Eng.IEEE Computer Applications in Power IEEE Comput. Appl. PowerIEEE Computer Graphics and Application IEEE Comput. Graph. Appl.IEEE Concurrency IEEE ConcurrencyIEEE Control Systems Magazine IEEE Control Syst. Mag.IEEE Design & Test of Computers IEEE Des. Test. Comput.IEEE Electrical Insulation Magazine IEEE Electr. Insul. Mag.IEEE ElectroTechnology Review IEEE ElectroTechnol. Rev.IEEE Engineering in Medicine and Biology Magazine IEEE Eng. Med. Biol. Mag.IEEE Engineering Management Review IEEE Eng. Manag. Rev.IEEE Expert (through 1997) IEEE ExpertIEEE Industrial Electronics Magazine IEEE Ind. Electron.. Mag.IEEE Industry Applications Magazine IEEE Ind. Appl. Mag.IEEE Instrumentation and Measurement Magazine IEEE Instrum. Meas. Mag.IEEE Intelligent Systems (formerly IEEE Expert) IEEE Intell. Syst.IEEE Internet Computing IEEE Internet Comput.IEEE IT Professional IEEE IT Prof.IEEE Micro IEEE MicroIEEE Microwave Magazine IEEE Microw. Mag.IEEE MultiMedia IEEE MultimediaIEEE Nanotechnology Magazine IEEE Nanotechnol. Mag.IEEE Network IEEE Netw.IEEE Personal Communications IEEE Pers. Commun.IEEE Potentials IEEE PotentialsIEEE Power and Energy Magazine IEEE Power Energy Mag.IEEE Power Engineering Review IEEE Power Eng. Rev.IEEE Robotics and Automation Magazine IEEE Robot. Autom. Mag.IEEE Signal Processing Magazine (1991–present) IEEE Signal Process. Mag.IEEE Solid State Circuits Magazine IEEE Solid State Circuits Mag.IEEE Security and Privacy IEEE Security PrivacyIEEE Software IEEE Softw.IEEE Spectrum IEEE Spectr.IEEE Technology and Society Magazine IEEE Technol. Soc. Mag.IEEE Vehicular Technology Magazine IEEE Veh. Technol. Mag.Communications Surveys and Tutorials Commun. Surveys Tuts.Computer ComputerInternet Computing Internet Comput.Pervasive Computing Pervasive Comput.Today’s Engineer Today’s EngineerWireless Communications Wireless Commun.。
An Overview of Recent Progress in the Study of Distributed Multi-agent Coordination
An Overview of Recent Progress in the Study of Distributed Multi-agent CoordinationYongcan Cao,Member,IEEE,Wenwu Yu,Member,IEEE,Wei Ren,Member,IEEE,and Guanrong Chen,Fellow,IEEEAbstract—This article reviews some main results and progress in distributed multi-agent coordination,focusing on papers pub-lished in major control systems and robotics journals since 2006.Distributed coordination of multiple vehicles,including unmanned aerial vehicles,unmanned ground vehicles and un-manned underwater vehicles,has been a very active research subject studied extensively by the systems and control community. The recent results in this area are categorized into several directions,such as consensus,formation control,optimization, and estimation.After the review,a short discussion section is included to summarize the existing research and to propose several promising research directions along with some open problems that are deemed important for further investigations.Index Terms—Distributed coordination,formation control,sen-sor networks,multi-agent systemI.I NTRODUCTIONC ONTROL theory and practice may date back to thebeginning of the last century when Wright Brothers attempted theirfirst testflight in1903.Since then,control theory has gradually gained popularity,receiving more and wider attention especially during the World War II when it was developed and applied tofire-control systems,missile nav-igation and guidance,as well as various electronic automation devices.In the past several decades,modern control theory was further advanced due to the booming of aerospace technology based on large-scale engineering systems.During the rapid and sustained development of the modern control theory,technology for controlling a single vehicle, albeit higher-dimensional and complex,has become relatively mature and has produced many effective tools such as PID control,adaptive control,nonlinear control,intelligent control, This work was supported by the National Science Foundation under CAREER Award ECCS-1213291,the National Natural Science Foundation of China under Grant No.61104145and61120106010,the Natural Science Foundation of Jiangsu Province of China under Grant No.BK2011581,the Research Fund for the Doctoral Program of Higher Education of China under Grant No.20110092120024,the Fundamental Research Funds for the Central Universities of China,and the Hong Kong RGC under GRF Grant CityU1114/11E.The work of Yongcan Cao was supported by a National Research Council Research Associateship Award at AFRL.Y.Cao is with the Control Science Center of Excellence,Air Force Research Laboratory,Wright-Patterson AFB,OH45433,USA.W.Yu is with the Department of Mathematics,Southeast University,Nanjing210096,China and also with the School of Electrical and Computer Engineering,RMIT University,Melbourne VIC3001,Australia.W.Ren is with the Department of Electrical Engineering,University of California,Riverside,CA92521,USA.G.Chen is with the Department of Electronic Engineering,City University of Hong Kong,Hong Kong SAR,China.Copyright(c)2009IEEE.Personal use of this material is permitted. However,permission to use this material for any other purposes must be obtained from the IEEE by sending a request to pubs-permissions@.and robust control methodologies.In the past two decades in particular,control of multiple vehicles has received increas-ing demands spurred by the fact that many benefits can be obtained when a single complicated vehicle is equivalently replaced by multiple yet simpler vehicles.In this endeavor, two approaches are commonly adopted for controlling multiple vehicles:a centralized approach and a distributed approach. The centralized approach is based on the assumption that a central station is available and powerful enough to control a whole group of vehicles.Essentially,the centralized ap-proach is a direct extension of the traditional single-vehicle-based control philosophy and strategy.On the contrary,the distributed approach does not require a central station for control,at the cost of becoming far more complex in structure and organization.Although both approaches are considered practical depending on the situations and conditions of the real applications,the distributed approach is believed more promising due to many inevitable physical constraints such as limited resources and energy,short wireless communication ranges,narrow bandwidths,and large sizes of vehicles to manage and control.Therefore,the focus of this overview is placed on the distributed approach.In distributed control of a group of autonomous vehicles,the main objective typically is to have the whole group of vehicles working in a cooperative fashion throughout a distributed pro-tocol.Here,cooperative refers to a close relationship among all vehicles in the group where information sharing plays a central role.The distributed approach has many advantages in achieving cooperative group performances,especially with low operational costs,less system requirements,high robustness, strong adaptivity,andflexible scalability,therefore has been widely recognized and appreciated.The study of distributed control of multiple vehicles was perhapsfirst motivated by the work in distributed comput-ing[1],management science[2],and statistical physics[3]. In the control systems society,some pioneering works are generally referred to[4],[5],where an asynchronous agree-ment problem was studied for distributed decision-making problems.Thereafter,some consensus algorithms were studied under various information-flow constraints[6]–[10].There are several journal special issues on the related topics published af-ter2006,including the IEEE Transactions on Control Systems Technology(vol.15,no.4,2007),Proceedings of the IEEE (vol.94,no.4,2007),ASME Journal of Dynamic Systems, Measurement,and Control(vol.129,no.5,2007),SIAM Journal of Control and Optimization(vol.48,no.1,2009),and International Journal of Robust and Nonlinear Control(vol.21,no.12,2011).In addition,there are some recent reviewsand progress reports given in the surveys[11]–[15]and thebooks[16]–[23],among others.This article reviews some main results and recent progressin distributed multi-agent coordination,published in majorcontrol systems and robotics journals since2006.Due to space limitations,we refer the readers to[24]for a more completeversion of the same overview.For results before2006,thereaders are referred to[11]–[14].Specifically,this article reviews the recent research resultsin the following directions,which are not independent but actually may have overlapping to some extent:1.Consensus and the like(synchronization,rendezvous).Consensus refers to the group behavior that all theagents asymptotically reach a certain common agreementthrough a local distributed protocol,with or without predefined common speed and orientation.2.Distributed formation and the like(flocking).Distributedformation refers to the group behavior that all the agents form a pre-designed geometrical configuration throughlocal interactions with or without a common reference.3.Distributed optimization.This refers to algorithmic devel-opments for the analysis and optimization of large-scaledistributed systems.4.Distributed estimation and control.This refers to dis-tributed control design based on local estimation aboutthe needed global information.The rest of this article is organized as follows.In Section II,basic notations of graph theory and stochastic matrices are introduced.Sections III,IV,V,and VI describe the recentresearch results and progress in consensus,formation control, optimization,and estimation.Finally,the article is concludedby a short section of discussions with future perspectives.II.P RELIMINARIESA.Graph TheoryFor a system of n connected agents,its network topology can be modeled as a directed graph denoted by G=(V,W),where V={v1,v2,···,v n}and W⊆V×V are,respectively, the set of agents and the set of edges which directionallyconnect the agents together.Specifically,the directed edgedenoted by an ordered pair(v i,v j)means that agent j can access the state information of agent i.Accordingly,agent i is a neighbor of agent j.A directed path is a sequence of directed edges in the form of(v1,v2),(v2,v3),···,with all v i∈V.A directed graph has a directed spanning tree if there exists at least one agent that has a directed path to every other agent.The union of a set of directed graphs with the same setof agents,{G i1,···,G im},is a directed graph with the sameset of agents and its set of edges is given by the union of the edge sets of all the directed graphs G ij,j=1,···,m.A complete directed graph is a directed graph in which each pair of distinct agents is bidirectionally connected by an edge,thus there is a directed path from any agent to any other agent in the network.Two matrices are used to represent the network topology: the adjacency matrix A=[a ij]∈R n×n with a ij>0if (v j,v i)∈W and a ij=0otherwise,and the Laplacian matrix L=[ℓij]∈R n×n withℓii= n j=1a ij andℓij=−a ij,i=j, which is generally asymmetric for directed graphs.B.Stochastic MatricesA nonnegative square matrix is called(row)stochastic matrix if its every row is summed up to one.The product of two stochastic matrices is still a stochastic matrix.A row stochastic matrix P∈R n×n is called indecomposable and aperiodic if lim k→∞P k=1y T for some y∈R n[25],where 1is a vector with all elements being1.III.C ONSENSUSConsider a group of n agents,each with single-integrator kinematics described by˙x i(t)=u i(t),i=1,···,n,(1) where x i(t)and u i(t)are,respectively,the state and the control input of the i th agent.A typical consensus control algorithm is designed asu i(t)=nj=1a ij(t)[x j(t)−x i(t)],(2)where a ij(t)is the(i,j)th entry of the corresponding ad-jacency matrix at time t.The main idea behind(2)is that each agent moves towards the weighted average of the states of its neighbors.Given the switching network pattern due to the continuous motions of the dynamic agents,coupling coefficients a ij(t)in(2),hence the graph topologies,are generally time-varying.It is shown in[9],[10]that consensus is achieved if the underlying directed graph has a directed spanning tree in some jointly fashion in terms of a union of its time-varying graph topologies.The idea behind consensus serves as a fundamental principle for the design of distributed multi-agent coordination algo-rithms.Therefore,investigating consensus has been a main research direction in the study of distributed multi-agent co-ordination.To bridge the gap between the study of consensus algorithms and many physical properties inherited in practical systems,it is necessary and meaningful to study consensus by considering many practical factors,such as actuation,control, communication,computation,and vehicle dynamics,which characterize some important features of practical systems.This is the main motivation to study consensus.In the following part of the section,an overview of the research progress in the study of consensus is given,regarding stochastic network topologies and dynamics,complex dynamical systems,delay effects,and quantization,mainly after2006.Several milestone results prior to2006can be found in[2],[4]–[6],[8]–[10], [26].A.Stochastic Network Topologies and DynamicsIn multi-agent systems,the network topology among all vehicles plays a crucial role in determining consensus.The objective here is to explicitly identify necessary and/or suffi-cient conditions on the network topology such that consensus can be achieved under properly designed algorithms.It is often reasonable to consider the case when the network topology is deterministic under ideal communication chan-nels.Accordingly,main research on the consensus problem was conducted under a deterministicfixed/switching network topology.That is,the adjacency matrix A(t)is deterministic. Some other times,when considering random communication failures,random packet drops,and communication channel instabilities inherited in physical communication channels,it is necessary and important to study consensus problem in the stochastic setting where a network topology evolves according to some random distributions.That is,the adjacency matrix A(t)is stochastically evolving.In the deterministic setting,consensus is said to be achieved if all agents eventually reach agreement on a common state. In the stochastic setting,consensus is said to be achieved almost surely(respectively,in mean-square or in probability)if all agents reach agreement on a common state almost surely (respectively,in mean-square or with probability one).Note that the problem studied in the stochastic setting is slightly different from that studied in the deterministic setting due to the different assumptions in terms of the network topology. Consensus over a stochastic network topology was perhaps first studied in[27],where some sufficient conditions on the network topology were given to guarantee consensus with probability one for systems with single-integrator kinemat-ics(1),where the rate of convergence was also studied.Further results for consensus under a stochastic network topology were reported in[28]–[30],where research effort was conducted for systems with single-integrator kinematics[28],[29]or double-integrator dynamics[30].Consensus for single-integrator kine-matics under stochastic network topology has been exten-sively studied in particular,where some general conditions for almost-surely consensus was derived[29].Loosely speaking, almost-surely consensus for single-integrator kinematics can be achieved,i.e.,x i(t)−x j(t)→0almost surely,if and only if the expectation of the network topology,namely,the network topology associated with expectation E[A(t)],has a directed spanning tree.It is worth noting that the conditions are analogous to that in[9],[10],but in the stochastic setting. In view of the special structure of the closed-loop systems concerning consensus for single-integrator kinematics,basic properties of the stochastic matrices play a crucial role in the convergence analysis of the associated control algorithms. Consensus for double-integrator dynamics was studied in[30], where the switching network topology is assumed to be driven by a Bernoulli process,and it was shown that consensus can be achieved if the union of all the graphs has a directed spanning tree.Apparently,the requirement on the network topology for double-integrator dynamics is a special case of that for single-integrator kinematics due to the difference nature of thefinal states(constantfinal states for single-integrator kinematics and possible dynamicfinal states for double-integrator dynamics) caused by the substantial dynamical difference.It is still an open question as if some general conditions(corresponding to some specific algorithms)can be found for consensus with double-integrator dynamics.In addition to analyzing the conditions on the network topology such that consensus can be achieved,a special type of consensus algorithm,the so-called gossip algorithm[31],[32], has been used to achieve consensus in the stochastic setting. The gossip algorithm can always guarantee consensus almost surely if the available pairwise communication channels satisfy certain conditions(such as a connected graph).The way of network topology switching does not play any role in the consideration of consensus.The current study on consensus over stochastic network topologies has shown some interesting results regarding:(1) consensus algorithm design for various multi-agent systems,(2)conditions of the network topologies on consensus,and(3)effects of the stochastic network topologies on the con-vergence rate.Future research on this topic includes,but not limited to,the following two directions:(1)when the network topology itself is stochastic,how to determine the probability of reaching consensus almost surely?(2)compared with the deterministic network topology,what are the advantages and disadvantages of the stochastic network topology,regarding such as robustness and convergence rate?As is well known,disturbances and uncertainties often exist in networked systems,for example,channel noise,commu-nication noise,uncertainties in network parameters,etc.In addition to the stochastic network topologies discussed above, the effect of stochastic disturbances[33],[34]and uncertain-ties[35]on the consensus problem also needs investigation. Study has been mainly devoted to analyzing the performance of consensus algorithms subject to disturbances and to present-ing conditions on the uncertainties such that consensus can be achieved.In addition,another interesting direction in dealing with disturbances and uncertainties is to design distributed localfiltering algorithms so as to save energy and improve computational efficiency.Distributed localfiltering algorithms play an important role and are more effective than traditional centralizedfiltering algorithms for multi-agent systems.For example,in[36]–[38]some distributed Kalmanfilters are designed to implement data fusion.In[39],by analyzing consensus and pinning control in synchronization of complex networks,distributed consensusfiltering in sensor networks is addressed.Recently,Kalmanfiltering over a packet-dropping network is designed through a probabilistic approach[40]. Today,it remains a challenging problem to incorporate both dynamics of consensus and probabilistic(Kalman)filtering into a unified framework.plex Dynamical SystemsSince consensus is concerned with the behavior of a group of vehicles,it is natural to consider the system dynamics for practical vehicles in the study of the consensus problem. Although the study of consensus under various system dynam-ics is due to the existence of complex dynamics in practical systems,it is also interesting to observe that system dynamics play an important role in determining thefinal consensus state.For instance,the well-studied consensus of multi-agent systems with single-integrator kinematics often converges to a constantfinal value instead.However,consensus for double-integrator dynamics might admit a dynamicfinal value(i.e.,a time function).These important issues motivate the study of consensus under various system dynamics.As a direct extension of the study of the consensus prob-lem for systems with simple dynamics,for example,with single-integrator kinematics or double-integrator dynamics, consensus with general linear dynamics was also studied recently[41]–[43],where research is mainly devoted tofinding feedback control laws such that consensus(in terms of the output states)can be achieved for general linear systems˙x i=Ax i+Bu i,y i=Cx i,(3) where A,B,and C are constant matrices with compatible sizes.Apparently,the well-studied single-integrator kinematics and double-integrator dynamics are special cases of(3)for properly choosing A,B,and C.As a further extension,consensus for complex systems has also been extensively studied.Here,the term consensus for complex systems is used for the study of consensus problem when the system dynamics are nonlinear[44]–[48]or with nonlinear consensus algorithms[49],[50].Examples of the nonlinear system dynamics include:•Nonlinear oscillators[45].The dynamics are often as-sumed to be governed by the Kuramoto equation˙θi=ωi+Kstability.A well-studied consensus algorithm for(1)is given in(2),where it is now assumed that time delay exists.Two types of time delays,communication delay and input delay, have been considered in the munication delay accounts for the time for transmitting information from origin to destination.More precisely,if it takes time T ij for agent i to receive information from agent j,the closed-loop system of(1)using(2)under afixed network topology becomes˙x i(t)=nj=1a ij(t)[x j(t−T ij)−x i(t)].(7)An interpretation of(7)is that at time t,agent i receives information from agent j and uses data x j(t−T ij)instead of x j(t)due to the time delay.Note that agent i can get its own information instantly,therefore,input delay can be considered as the summation of computation time and execution time. More precisely,if the input delay for agent i is given by T p i, then the closed-loop system of(1)using(2)becomes˙x i(t)=nj=1a ij(t)[x j(t−T p i)−x i(t−T p i)].(8)Clearly,(7)refers to the case when only communication delay is considered while(8)refers to the case when only input delay is considered.It should be emphasized that both communication delay and input delay might be time-varying and they might co-exist at the same time.In addition to time delay,it is also important to consider packet drops in exchanging state information.Fortunately, consensus with packet drops can be considered as a special case of consensus with time delay,because re-sending packets after they were dropped can be easily done but just having time delay in the data transmission channels.Thus,the main problem involved in consensus with time delay is to study the effects of time delay on the convergence and performance of consensus,referred to as consensusabil-ity[52].Because time delay might affect the system stability,it is important to study under what conditions consensus can still be guaranteed even if time delay exists.In other words,can onefind conditions on the time delay such that consensus can be achieved?For this purpose,the effect of time delay on the consensusability of(1)using(2)was investigated.When there exists only(constant)input delay,a sufficient condition on the time delay to guarantee consensus under afixed undirected interaction graph is presented in[8].Specifically,an upper bound for the time delay is derived under which consensus can be achieved.This is a well-expected result because time delay normally degrades the system performance gradually but will not destroy the system stability unless the time delay is above a certain threshold.Further studies can be found in, e.g.,[53],[54],which demonstrate that for(1)using(2),the communication delay does not affect the consensusability but the input delay does.In a similar manner,consensus with time delay was studied for systems with different dynamics, where the dynamics(1)are replaced by other more complex ones,such as double-integrator dynamics[55],[56],complex networks[57],[58],rigid bodies[59],[60],and general nonlinear dynamics[61].In summary,the existing study of consensus with time delay mainly focuses on analyzing the stability of consensus algo-rithms with time delay for various types of system dynamics, including linear and nonlinear dynamics.Generally speaking, consensus with time delay for systems with nonlinear dynam-ics is more challenging.For most consensus algorithms with time delays,the main research question is to determine an upper bound of the time delay under which time delay does not affect the consensusability.For communication delay,it is possible to achieve consensus under a relatively large time delay threshold.A notable phenomenon in this case is that thefinal consensus state is constant.Considering both linear and nonlinear system dynamics in consensus,the main tools for stability analysis of the closed-loop systems include matrix theory[53],Lyapunov functions[57],frequency-domain ap-proach[54],passivity[58],and the contraction principle[62]. Although consensus with time delay has been studied extensively,it is often assumed that time delay is either constant or random.However,time delay itself might obey its own dynamics,which possibly depend on the communication distance,total computation load and computation capability, etc.Therefore,it is more suitable to represent the time delay as another system variable to be considered in the study of the consensus problem.In addition,it is also important to consider time delay and other physical constraints simultaneously in the study of the consensus problem.D.QuantizationQuantized consensus has been studied recently with motiva-tion from digital signal processing.Here,quantized consensus refers to consensus when the measurements are digital rather than analog therefore the information received by each agent is not continuous and might have been truncated due to digital finite precision constraints.Roughly speaking,for an analog signal s,a typical quantizer with an accuracy parameterδ, also referred to as quantization step size,is described by Q(s)=q(s,δ),where Q(s)is the quantized signal and q(·,·) is the associated quantization function.For instance[63],a quantizer rounding a signal s to its nearest integer can be expressed as Q(s)=n,if s∈[(n−1/2)δ,(n+1/2)δ],n∈Z, where Z denotes the integer set.Note that the types of quantizers might be different for different systems,hence Q(s) may differ for different systems.Due to the truncation of the signals received,consensus is now considered achieved if the maximal state difference is not larger than the accuracy level associated with the whole system.A notable feature for consensus with quantization is that the time to reach consensus is usuallyfinite.That is,it often takes afinite period of time for all agents’states to converge to an accuracy interval.Accordingly,the main research is to investigate the convergence time associated with the proposed consensus algorithm.Quantized consensus was probablyfirst studied in[63], where a quantized gossip algorithm was proposed and its convergence was analyzed.In particular,the bound of theconvergence time for a complete graph was shown to be poly-nomial in the network size.In[64],coding/decoding strate-gies were introduced to the quantized consensus algorithms, where it was shown that the convergence rate depends on the accuracy of the quantization but not the coding/decoding schemes.In[65],quantized consensus was studied via the gossip algorithm,with both lower and upper bounds of the expected convergence time in the worst case derived in terms of the principle submatrices of the Laplacian matrix.Further results regarding quantized consensus were reported in[66]–[68],where the main research was also on the convergence time for various proposed quantized consensus algorithms as well as the quantization effects on the convergence time.It is intuitively reasonable that the convergence time depends on both the quantization level and the network topology.It is then natural to ask if and how the quantization methods affect the convergence time.This is an important measure of the robustness of a quantized consensus algorithm(with respect to the quantization method).Note that it is interesting but also more challenging to study consensus for general linear/nonlinear systems with quantiza-tion.Because the difference between the truncated signal and the original signal is bounded,consensus with quantization can be considered as a special case of one without quantization when there exist bounded disturbances.Therefore,if consensus can be achieved for a group of vehicles in the absence of quantization,it might be intuitively correct to say that the differences among the states of all vehicles will be bounded if the quantization precision is small enough.However,it is still an open question to rigorously describe the quantization effects on consensus with general linear/nonlinear systems.E.RemarksIn summary,the existing research on the consensus problem has covered a number of physical properties for practical systems and control performance analysis.However,the study of the consensus problem covering multiple physical properties and/or control performance analysis has been largely ignored. In other words,two or more problems discussed in the above subsections might need to be taken into consideration simul-taneously when studying the consensus problem.In addition, consensus algorithms normally guarantee the agreement of a team of agents on some common states without taking group formation into consideration.To reflect many practical applications where a group of agents are normally required to form some preferred geometric structure,it is desirable to consider a task-oriented formation control problem for a group of mobile agents,which motivates the study of formation control presented in the next section.IV.F ORMATION C ONTROLCompared with the consensus problem where thefinal states of all agents typically reach a singleton,thefinal states of all agents can be more diversified under the formation control scenario.Indeed,formation control is more desirable in many practical applications such as formationflying,co-operative transportation,sensor networks,as well as combat intelligence,surveillance,and reconnaissance.In addition,theperformance of a team of agents working cooperatively oftenexceeds the simple integration of the performances of all individual agents.For its broad applications and advantages,formation control has been a very active research subject inthe control systems community,where a certain geometric pattern is aimed to form with or without a group reference.More precisely,the main objective of formation control is to coordinate a group of agents such that they can achievesome desired formation so that some tasks can befinished bythe collaboration of the agents.Generally speaking,formation control can be categorized according to the group reference.Formation control without a group reference,called formationproducing,refers to the algorithm design for a group of agents to reach some pre-desired geometric pattern in the absenceof a group reference,which can also be considered as the control objective.Formation control with a group reference,called formation tracking,refers to the same task but followingthe predesignated group reference.Due to the existence of the group reference,formation tracking is usually much morechallenging than formation producing and control algorithmsfor the latter might not be useful for the former.As of today, there are still many open questions in solving the formationtracking problem.The following part of the section reviews and discussesrecent research results and progress in formation control, including formation producing and formation tracking,mainlyaccomplished after2006.Several milestone results prior to 2006can be found in[69]–[71].A.Formation ProducingThe existing work in formation control aims at analyzingthe formation behavior under certain control laws,along with stability analysis.1)Matrix Theory Approach:Due to the nature of multi-agent systems,matrix theory has been frequently used in thestability analysis of their distributed coordination.Note that consensus input to each agent(see e.g.,(2))isessentially a weighted average of the differences between the states of the agent’s neighbors and its own.As an extensionof the consensus algorithms,some coupling matrices wereintroduced here to offset the corresponding control inputs by some angles[72],[73].For example,given(1),the controlinput(2)is revised as u i(t)= n j=1a ij(t)C[x j(t)−x i(t)], where C is a coupling matrix with compatible size.If x i∈R3, then C can be viewed as the3-D rotational matrix.The mainidea behind the revised algorithm is that the original controlinput for reaching consensus is now rotated by some angles. The closed-loop system can be expressed in a vector form, whose stability can be determined by studying the distribution of the eigenvalues of a certain transfer matrix.Main research work was conducted in[72],[73]to analyze the collective motions for systems with single-integrator kinematics and double-integrator dynamics,where the network topology,the damping gain,and C were shown to affect the collective motions.Analogously,the collective motions for a team of nonlinear self-propelling agents were shown to be affected by。
Communication Systems and Networks

Communication Systems and Networks Communication systems and networks have become the bedrock of our modern society, fundamentally altering how we interact, work, and access information. These intricate systems, ranging from simple telephone lines to sophisticated satellite networks, facilitate the seamless transfer of data across vast geographical boundaries. This essay aims to explore the multifaceted nature of communication systems and networks, highlighting their key components, benefits, and potential drawbacks. At the heart of any communication system lies a robust infrastructure comprising physical components and protocols that govern data transmission. These components include transmitters, receivers, and transmission media, such as copper wires, fiber optic cables, and radio waves. Each component plays a crucial role in ensuring accurate and efficient data transfer. For instance, transmitters convert information into signals suitable for transmission, while receivers decode these signals back into their original form. Transmission media act as conduits for these signals, propagating them across distances. Communication networks are essentially interconnected systems that enable communication between multiple users or devices. They can be classified into various categories based on their geographical coverage, such as Local Area Networks (LANs), Metropolitan Area Networks (MANs), and Wide Area Networks (WANs). LANs, typically confined to a single building or campus, facilitate high-speed data exchange between interconnected devices. MANs extend this connectivity to a larger metropolitan area, connecting various LANs within a city. WANs, spanning vast geographical regions, often rely on satellite links or undersea cables to connect continents and facilitate global communication. The advent of communication systems and networks has ushered in a plethora of benefits, revolutionizing numerous aspects of our lives. These systems have democratized access to information, empowering individuals with unprecedented knowledge and insights. They have also fostered global interconnectedness, facilitating seamless communication across borders and cultures. Businesses have witnessed increased productivity and efficiency due to streamlined communication channels and enhanced collaboration tools. Moreover, communication systems have played a pivotal role in enabling telemedicine, remote learning, and e-commerce, fostering advancements inhealthcare, education, and trade. However, alongside these transformative benefits, communication systems and networks also present potential drawbacks that warrant consideration. One significant concern is the issue of security. As these systems become increasingly complex and interconnected, they become vulnerable to cyberattacks and data breaches. Malicious actors can exploit vulnerabilities inthe infrastructure to steal sensitive information, disrupt services, or spread misinformation. Another concern is the potential for digital divide, where unequal access to communication technologies can exacerbate existing societal inequalities. This divide can arise due to factors such as geographical location, socioeconomic status, or lack of digital literacy. Furthermore, the pervasive nature of communication technologies can lead to information overload and digital addiction. Constant connectivity and the relentless influx of information can contribute to stress, anxiety, and a decline in mental well-being. Moreover, the increasing reliance on digital communication can have unintended consequences forinterpersonal relationships and face-to-face interactions. The ease of sending a text message or email can sometimes replace genuine human connection and hinderthe development of essential social skills. In conclusion, communication systems and networks have undoubtedly revolutionized our world, connecting people and information in unprecedented ways. While their benefits are undeniable, it is crucial to acknowledge and address the potential drawbacks associated with these technologies. Striking a balance between harnessing the power of communication systems and mitigating their risks is paramount to ensuring a future where these systems continue to empower and connect us, while safeguarding our privacy, well-being, and social fabric.。
MULTIPLE MEMORY MATERIALS AND SYSTEMS, METHODS AND

专利名称:MULTIPLE MEMORY MATERIALS ANDSYSTEMS, METHODS AND APPLICATIONSTHEREFOR发明人:Mohammad Ibrahem KHAN,Andrew NikolasPEQUEGNAT申请号:US15325901申请日:20150714公开号:US20170165532A1公开日:20170615专利内容由知识产权出版社提供专利附图:摘要:An apparatus for fabrication of a multiple memory material including: a feedingassembly for feeding shape memory material; a processing station aligned with the feeding assembly to receive the shape memory material to be processed; at least one energy source aligned with an energy source aperture to provide energy to the shape memory material; a shielding gas provider attached to a shielding gas engagement portion to provide shielding gas; and a controller configured to control the feeding assembly, the shielding gas provider and the energy source according to predetermined parameters to form the multiple memory material. A method for fabricating a multiple memory material including: determining process parameters for the shape memory material, via a controller; receiving shape memory material at a feeding assembly; feeding the shape memory material, via the feed assembly, to a processing station; providing shielding gas to the processing station, via a shielding gas provider; and providing energy to the shape memory material, via at least one energy source, based on the process parameters to produce the multiple memory material.申请人:SMARTER ALLOYS INC.地址:Waterloo CA国籍:CA更多信息请下载全文后查看。
OBT-BSP-Rtems 应用开发手册说明书

OBT-BSP-Rtems 应用开发手册V 2.0珠海欧比特宇航科技股份有限公司2011年6月26日目录1RTEMS概况 (1)2OBT-BSP-RTEMS说明 (2)2.1PROMCOREL文件 (4)2.2BOOT_CARD函数 (5)2.3BSP_START函数 (6)3RTEMS开发环境的搭建 (7)3.1RCC简介 (7)3.2RCC的安装 (7)3.3RCC的目录结构 (8)4RTEMS LIB开发 (9)4.1目录结构 (9)4.2硬件相关源代码 (11)4.3编译RTEMS LIB库 (11)5RTEMS应用程序开发 (12)5.1示例程序源码分析 (12)5.2编译RTEMS应用程序 (19)5.3在S698平台上运行RTEMS应用程序 (19)1RTEMS概况RTEMS (Real-Time Executive for Multiprocessor Systems)是一个支持多处理器系统的高性能实时嵌入式操作系统,主要应用于嵌入式军事应用领域。
它主要有以下特点:具备多任务处理能力;适用于同类或异类多处理器系统;事件驱动、基于优先级的抢占式调度;可选的单调速率调度机制;任务间通讯和同步;优先级继承;中断响应管理;动态内存分配;高级用户配置。
RTEMS 由ADA和C共同实现,它支持Intel X86、Motorola MC68K、MIPS、PowerPC、SPARC等主流处理器。
RTEMS完全支持个人微处理器家族或特殊功能硬件的特性,允许系统开发人员高度自由的定制和扩展它的特征。
易移植性是RTEMS开发中最主要的因素,它对硬件的依赖性小,实时应用可以很容易的移植到任何其它的处理器上。
采用RTEMS的实时系统,其功能升级完全不受特定的微处理器结构约束。
RTEMS支持多处理器系统,包括同类处理器和异类处理器。
它的内核能自动补偿处理器之间的结构差异(字节交换等),这使得一个处理器与其不同类的处理器交互变得简单,而不需要重新为其设计系统。
北师大版(2023)选择性必修 第四册Unit 10 Connections Writing Wor

北师大版(2023)选择性必修第四册Unit 10 Connections Writing Workshop 课件(共33张PPT)(共33张PPT)新北师大版高中英语选择性必修四Unit10 ConnectionsWriting WorkshopWarming-upYou are going to write a news report on a school or community event. Discuss these questions with your partner.1. What event would you like to write about2. What aspects are you going to include3. How is a news report normally organisedWarming-upWarming-upWarming-upTips:When writing a news report, it’s important to concentrate on four elements — facts, context, impact, and emotion. How you combine these four elements will determine the success of your news story.3. How is a news report normally organisedWarming-upFacts:First, you can hardly call it a news story without the facts. Otherwise, it quickly becomes an opinion piece or a lifestyle article. Not only does the public expect facts over opinions, but they also expect the journalist to follow sound fact-checking procedures.The facts answer the 5Ws (and H): who, what, where, when, why, and how. A journalist has a responsibility to make sure the facts are accurate and reasonably complete. If you have to write a report before you get all the facts, then say so in the report.Warming-upContextIn news writing, context answers the question, “Why should I care ” or, “Why should I read this ” But, from the perspective of the news writer, context helps you decide what the audience needs to know. The American Press Institute cites context as a nice way to gain new readers through an entry point they can relate to. Context provides the circumstances surrounding the facts of the news story.Warming-upImpactImpact touches on the “why we should care” theme too. News writing is, indeed, an art form. Once you take something off the official wire, youhave to weave it into a story people will connect with. Impact keeps readers in tune beyond the headline and the lead, or opening sentence. What are the ramifications or potential consequences of this news story How will this series of events affect me and my loved onesWarming-upEmotionThe American Press Institute says emotion commands attention and fosters a communal feeling. Evoking emotion is the magic of news reporting. Writers must walk the fine line between cold, hard facts and a tug on emotional heartstrings.But you must let the readers decide for themselves. For example, the American Press Institute points out you must not dictate the audience’s feelings by writing, “In a shocking, new development …” Rather, you should let them choose to be shocked on their own.Reading1. What event is the report aboutThe first Community Street Festival.2. When and where did the event happenOn 21 September on Redwood Street.3. Who attended the event and what did they doOver 10,000 people from over 20 communities. There were a variety of acts, most of which were singing and dancing.4. What did the event bring to the communityThe festival gave great pleasure to a large number of people and it broughttogether the different communities within our city.Read the news report and answer the questions.ReadingLead Body Round-upPara. 1 _______ Para. 2 _______ Para. 3 _______ Para. 4 __________ The news report has four paragraphs. Label each paragraph with a function.LeadBodyRound-upBodyReadingLead:highly successful; rather good, well receivedBody:popular; highlight; well organized; enjoyedRound-up:gave great pleasure to; “we are eager to participate in next year’s festival.”Write down all the expressions that convey the fact that the event was a success.WritingSentence BuilderAdverbs of DegreehighlyThe festival was highly successful …ratherThe performers were rather good …mainlyPeople attending the event were mainly families.particularlyThe acts appealing to children were particularly popular.Write 2-3 sentences about the event you are going to report. Use the Sentence Builder to help you.新闻报道新闻报道作为一种常见文体,具有广泛的受众面。
新教材高中英语Unit6Spaceandbeyond理解课文精研读课件外研版选择性必修第四册

细读教材 P62-63 课文,完成下列任务 Ⅰ.主旨匹配 1.Para.1 A.One student told us her experience on that
disastrous day. 2.Para.2 B.The things that were done following the disaster. 3.Para.3 C.The Challenger calls to us to reach for the stars.
3.We didn't have much patience waiting for the launch. B.判断下列语句中哪个不是描述心理活动的 1.Instantaneously,excitement and optimism turned into terror and failure. 2.There was an ordinary teacher on the Challenger,and we were all very excited. 3....the space shuttle programme resumed with the successful launch of Discovery. [答案] 3
1.Millions watched that first lunar landing on black and white television sets,their hearts in their mouths,aware of how arduous and hazardous an undertaking it was,and of the many things that ________.
She planned to 3._g_i_v_e_t_w_o__1_5_m_i_n_u_te__le_s_s_o_n_s____ from
全方位的神奇不仅是听音乐 German Physiks多声道组合试用

全方位的神奇不仅是听音乐 German Physiks多声道组合试
用
家祺
【期刊名称】《中国电子商情:视听前线》
【年(卷),期】2017(000)002
【摘要】现在家庭影院市场稳定发展,产品类别也越来越广,做影院产品的厂商
越来越多,因此本刊接触到的品牌也越来越多了。
有时候发现一些不熟悉的产品时,不禁会有“啊原来他们也做影院啊”或者“啊这个也可以拿来做影院啊”的想法。
比如我之前听German Physiks的多声道系统时,就想着“这个也可以拿来做影
院啊”。
【总页数】3页(P39-41)
【作者】家祺
【作者单位】
【正文语种】中文
【中图分类】TN912.26
【相关文献】
1.绝对是一款全方位的音箱 German Physiks PQS-100 Plus音箱 [J], 魏珏;阿龙(摄影)
2.German Physiks:PQS-402音箱 [J],
3.全方位发声高端音响之选 German Physiks HRS-120 Se落地音箱 [J], 家祺;小
路(图)
4.German Physiks PQS-100 Plus书架箱 [J],
5.诺昌音响获德国German Physiks中国地区总代理权 [J],
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
High performance with deterministic behavior Low overhead with predictable resource consumption
– Full executables currently as small as 16K
Highly configurable with unused features left out by linker
Tool repositories are mirrored at three sites
© On-Line Applications Research Corporation
© On-Line Applications Research Corporation
4
RTEMS
OAR
RTEMS vs Other OSes
Designed and supported to be open source
– we can answer “Why was it done this way?” – openness includes test suite and documentation
4.10 CVS
Yes Yes No Yes Yes Partial Partial Yes Yes No No Yes Yes No Yes Yes Partial Partial Yes Yes Yes No
11
© On-Line Applications Research Corporation
© On-Line Applications Research Corporation
8
RTEMS
OAR
RTEMS Architecture
CORBA RPC/ XDR tftp ftpd telnetd GUIs httpd Add-on Libraries zlib DHCP ICMP BOOTP PPP libavl readline ncurses Tcl NanoX MicroWindows OpenGUI FLTK picoTk Remote Debugging SNMP
4.10 CVS
Yes Yes Yes Yes Partial No No Yes No No Yes Yes Yes Yes Yes Partial No No Yes No Yes Yes
© On-Line Applications Research Corporation
10
RTEMS
OAR
RTEMS
OAR
RTEMS 4.10 and Beyond
Joel Sherrill, Ph.D.
Director of R&D OAR Corporation
December 2010
RTEMS
OAR
Outline
Highlights of RTEMS history RTEMS features What’s new in RTEMS 4.10 releases Wish List for 4.11 releases and beyond
4.6
No No Yes No No Yes Yes Yes Yes No Yes
4.7
No No Yes No Partial No No Yes No No Yes
4.8
Yes Yes Yes No Partial No No Yes No No Yes
4.9
Yes Yes Yes Yes Partial No No Yes No No Yes
µ ITRON API
SuperCore
Board Support Package
LibCHIP SuperCore CPU LibCPU
Hardware
© On-Line Applications Research Corporation
9
RTEMS
OAR
Processors Supported by RTEMS
Architecture
Altera NIOS II ADI Blackfin ARM with many CPU models ARM/Thumb Atmel AVR AMD A29K HP PA-RISC Intel/AMD x86 (i386 and above) Intel i960 Lattice Semiconductor Micro32 MIPS including multiple ISA levels
Single process, multi-threaded multi– comparable to VxWorks, Nucleus, pSOS+, ThreadX VxWorks, pSOS+,
POSIX Profiles PSE51 and PSE52
– no processes or MMU means no exec(), shm*(), etc. shm*(), – lighter than LynxOS or real-time GNU/Linux real© On-Line Applications Research Corporation 5
© On-Line Applications Research Corporation
2
RTEMS
OAR
History – Part I
1988 – OAR initiates development under contact to U.S. Army Missile Command (now U.S. AMCOM) 1992 – Superconducting Super Collider (SSC) is first non-Army nonorganization to receive RTEMS. Evaluated easily and favorably against pSOS+. pSOS+. 1992 – Project begins using GNU tools 1994 – ESA sponsors OAR development of SPARC port 1994 – Publicly available via anonymous ftp from U.S. Army 1995 – Oldest date in RTEMS CVS 11 May 1995 1996 – domain registered 1997 – GNAT/RTEMS passes Ada95 ACVC 1999 – First GNU/Linux RPMs
4.6
Yes Yes Yes Yes Yes No No Yes Yes No Yes
4.7
Yes Yes No Yes Yes No No Yes Yes No No
4.8
Yes Yes No Yes Yes No No Yes Yes No No
4.9
Yes Yes No Yes Yes No No Yes Yes No No
© On-Line Applications Research Corporation 7
RTEMS
OAR
RTEMS Features
Multitasking Highly Portable Standards Based Multiprocessing User Configurable ObjectObject-oriented Interrupt Processing/Management Development Environment Remote Debug Server Shell Eclipse plugin available Communication/Synchronization Memory Management I/O Drivers Various File Systems
RTEMS
OAR
RTEMS FeatБайду номын сангаасres
RTEMS is a Commercial Grade Real-Time Operating System RealTruly free in price, liberty, and end user requirements
– All source code for OS, support components, tests, documentation, development environment, and project website is provided
RTEMS
OAR
What’s New in 4.10? Updated Tools
Latest version of all tools in the RTEMS Development Environment
– – – – – autoconf 2.68 automake 1.11.1 binutils 2.20.1 gcc 4.4.5 for C/C++ with newlib 1.18.0 gdb 7.1
© On-Line Applications Research Corporation 3
RTEMS
OAR
History – Part II
2001 – 2001 – 2001 – 2004 – 2006 – 2007 – 2008 – 2008 – 2010 – 2010 – 2010 – Steering Committee formed Public problem tracking database available Ported to NASA space hardened MIPS Wiki started Circles Venus and Mars Launched to the asteroid belt with Dawn Launched with Herschel/Plank missions First year as Google Summer of Code project Launched with Solar Dynamic Observatory RTEMS Filesystem added One of 20 organizations in Google Code In