Manual_CN_MOVE3
IPC-623 用户手册说明书

User ManualIPC-6234U, 20-slot Rackmount IndustrialChassis4U, 20槽上架式工业机箱4U, 20槽上架式工業機箱Copyright/版权声明/版權聲明The documentation and the software included with this product are copyrighted 2018 by Advantech Co., Ltd. All rights are reserved. Advantech Co., Ltd. reserves the right to improve the products described in this manual at any time without notice. No part of this manual may be reproduced, copied, translated, or transmitted in any form or by any means without the prior written permission of Advantech Co., Ltd. The infor-mation provided in this manual is intended to be accurate and reliable. However, Advantech Co., Ltd. assumes no responsibility for its use, nor for any infringements of the rights of third parties that may result from its use.随附本产品发行的文件为研华公司2018年版权所有,并保留相关权利。
针对本手册中相关产品的说明,研华公司保留随时变更的权利,恕不另行通知。
Avionics Systems L-3 Communications产品手册说明书

ATA
Revision
Number Level
7100
165E6496-00
03
7100 CVDR
7200
CVDR
FA2100
FA2200
FA2300
FA5000
RDI
RIU
RAU
165E1696-02
03
RI
ROC
ROC/5
ROC/6
ROSE
RAU
165E1696-04
01
ROC/7
ROSE
Revision Date
905E5389-22
1
TP-344
22-00-01 C1
0040-34002-01
H
5/13/2015 4/19/2013
9/16/2015
LearJet Updates CVR AUTOMATED TEST STATION/ RECORDER INTERFACE UNIT (CATS/RIU) Accident Investigation Procedure
1/25/2015 ACCIDENT INVESTIGATION PROCEDURE
11/4/2010 Maintenance Manual with IPL 6/26/2017 GH-3900 Aircraft Configuration Module Tool
Avionics Systems L-3 Communications
Document Index
Last Updated: 8/15/2022 9:11:46 AM
Model Number
Publication Number
ATA Number
浪潮英信NP50服务器用户手册说明书

尊敬的浪潮英信服务器用户NP50服务器硬件的技术特点与软件的设置安装过程本手册介绍了英信浪潮集团有限公司拥有本手册的版权以利于污染预防未经浪潮集团有限公司许可浪潮集团有限公司保留随时修改本手册的权利如果您对本手册有疑问或建议浪潮集团有限公司 年3月 2003英信PentiumMS-DOS其他商标分别属于其相应的注册公司声 明 在您正式使用英信NP50服务器之前只有您阅读了以下声明并且同意以下条款后如果您对以下条款有任何疑问如您就以下条款未向我们提出疑问并开始使用英信NP50服务器1在任何时候请您不要修改英信NP50服务器BIOS中的任何其他参数在您使用的英信NP50服务器出现任何硬件故障或您希望对硬件进行任何升级时由于服务器是十分精密的机器3CPU散热片风扇网卡等设备都是特殊规格的4我们希望您首先和相应软件的提供商联系以方便我们沟通 对于如数据库运行问题5您拿到的产品可能和本手册中的描述有所不同供货商会给您详细的讲解这些更新的产品的使用您可以直接同我们联系6.本手册中涉及的各软硬件产品的标识7.以上声明中本服务器主板配备可更换锂电池在更换过程中只允许使用与制造商提供的同类或等效类型的替换件关于本手册本手册专为浪潮英信NP50服务器的最终用户而写浪潮英信NP50服务器用户手册为您提供一些必要的技术支持使其安全高效的运行第一章 如何连接安装第二章第三章第四章第五章您将了解到如何在英信NP50服务器上安装各种主流操作系统疑难解答 在这一章中我们建议您在使用英信NP50服务器之前仔细阅读此手册由于我们水平有限希望广大用户能够包涵技术服务电话:86-531-8546554 800 8600011传 真:86-531-8514355网 址:http://www.langchao.com.cn地 址:中国济南市山大路224号 浪潮集团有限公司邮 编:250013邮 件:sv_serv@langchao.com.cn目 录第一章 快速使用指南.......................................................11.1 开始使用浪潮英信NP50服务器.......................................11.2 英信NP50服务器技术特性...........................................31.3 随机软件说明......................................................4第二章 系统设置...........................................................62.1 设置系统BIOS......................................................62.2 主板跳线设置.....................................................25第三章 系统硬件..........................................................293.1 安装处理器.......................................................293.2 安装内存.........................................................323.3 安装硬盘.........................................................333.4 安装板卡.........................................................34第四章 IDE RAID 系统.....................................................354.1 IDE RAID 设置....................................................354.2 FastTrak 监控程序................................................42第五章 安装操作系统......................................................465.1 安装Windows NT 4.0...............................................465.2 安装Windows 2000 Server..........................................545.3 安装RedHat Linux 7.2.............................................58第六章 疑难解答..........................................................636.1 常见故障解决.....................................................636.2 技术支持信息.....................................................64请将我方产品的包装物交给废品收购站回收利用造福于人类1第一章 快速使用指南1.1 开始使用浪潮英信NP50服务器一小包装箱中是显示器配件盒首先拆掉大包装箱的外包装用塑料袋然后用裁纸刀把包装箱的封条打开把主机从包装箱中抬出您购买的浪潮英信NP50服务器就展现在您的面前二环境洁净远离强电磁区域和空调电动机等设备可方便地从电源和电源插座上插拔电源线并确保电源接地良好表1-1高度:宽度:深度:前侧空间要求:后侧空间要求:环境温度)200mm5永不停顿的浪潮英信服务器 英信NP50三电源接口2鼠标4USB接口6并口8网络接口11082551PCI扩展槽位1223四将主机键盘2连接好键盘网线将显示器的信号线接到主机显示卡接口连接好主机和显示器的电源线加电后就可以使用英信NP50服务器了浪潮英信NP50服务器规格集成功能8M显存 Intel 82562 10/100M网卡 1个软驱控制器 1个并口 符合ATX 12V规范 支持单P4处理器 系统总线400MHz和533MHz 4条184pin双列直插DIMM 支持ECC Unbuffer ATA133/100/66硬盘RAID 1键盘和辅助设备 PS/2鼠标扩展槽 1个AGP Pro/4x 插槽硬盘 可扩至5个硬盘光驱 标准3.5英寸 标准IDE CD-ROM4永不停顿的浪潮英信服务器 英信NP50上表中IDE RAID及其子项只适用于RAID系统管理特性1支持Wor2风扇转速及CPU温度3ACPI4定时开机功能1.3 随机软件说明英信NP50服务器随机带有NP50服务器随机光盘两张和4(2)张驱动程序软盘浪潮服务器的随机软件中有的软件建议您妥善保存 对于这些随机软件随机光盘分别是浪潮蓝海豚导航软件2一1IDE RAID Driver For RedHat 7.2注 意3 NIC Driver For Windows NT 4.0 Disk 2二1NIC Driver for Windows NT 4.0 Disk 25永不停顿的浪潮英信服务器 英信NP50第二章 系统设置前 言BIOS设置这些参数包括日期和时间信息随着硬件种类的增多由于对系统的正常运行有很大影响或者降低系统的运行性能建议您使用系统出厂时的默认值在改变服务器BIOS设置前以便在因修改选项而出现系统工作异常时2在未理解各参数表示的意义前3使用过程中较少涉及的选项仅作简单说明或未作说明在显示浪潮服务器画面时Press <DEL> to SETUP or <TAB> to POST此时按<DEL>键 在BIOS主菜单中按回车键进入子菜单671.Standard CMOS Features(标准COMS设置)Phoenix-AwardBIOS CMOS Setup UtilityStandard CMOS FeaturesAdvanced BIOS FeaturesAdvanced Chipset FeaturesIntegrated PeripheralsPower Management SetupPnP/PCI ConfigurationsPC Health StatusFrequency/Voltage ControlLoad Fail-Safe DefaultsLoad Optimized DefaultsSet Supervisor PasswordSet User PasswordSave & Exit SetupExit Without SavingESC Select Item F10永不停顿的浪潮英信服务器 英信NP50Time(hh:mm:ss)Date:设置系统的当前日期,格式为[月/日/年]PU/PDTime:设置系统的当前时间,格式为[时/分/秒]PU/PDIDE Secondary Master/Slave此项设置系统的IDE设备型号等参数按回车进入下级子菜单PU/PD有ManualNone三种设置方式Auto按[ESC]返回主菜单Drive A/B(驱动器A/B)此项允许您选择安装的软盘驱动器类型360K1.2M720K1.44M2.88M可选为EGA/VGACGA 80默认值是EGA/VGAHalt On(停止引导)此项设置启动过程中出现错误时可选择项有All, ErrorsNo ErrorsAll, But keyboardALL, But DisketteAll, But Disk/Key系统默认设置为All, But Keyboard892.Advanced BIOS Features(高级BIOS芯片设置)Phoenix AwordBIOS CMOS Setup UtilityAdvanced BIOS FeaturesVirus Warning [Disabled]CPU L1&L2 Cache [Enabled]Quick Power On Self Test [Enabled]ATA/66 & SCSI Boot Order [ATA,SCSI]First Boot Device [Floppy]Second Boot Device [HDD-0]Third Boot Device [CDROM]Boot Other Device [Enabled]Swap Floopy Drive [Disabled]Bootup Floopy Seek [Disabled]Boot Up NumLock Status [ON]Gate A20 Option [Fast]Typematic Rate Setting [Disabled]x Typematic Rate (chars/Sec) 6x Typematic Delay(Msec) 250Security Option [Setup]APIC Mode [Enabled]X Mps Version Control For os [1.1]Os Select For DRAM>64MB [NO-Os2]Report No FDD For WIN95 [Disabled]Small Logo(EPA) Show [Disabled]Item HelpMenu Level >:Move Enter:Select +/-/PU/PD:Value F10:Save ESC:Exit F1:General HelpF5: Previous Values F6: Fail-Safe Defaults F7: Optimized Defaults永不停顿的浪潮英信服务器 英信NP50病毒警报设定此项设定成Enabled后BIOS会在屏幕上显示警告信息L1L2快速引导加速Power On Self(POST)过程跳过一些检测项目第二设置系统设备的引导顺序使用进行参数设置First boot device: Floppy,Second boot device:CD-ROM,Third boot device :HDD-0,如果想通过光盘引导安装操作系统CDROM Boot Other Device该项可以设置当系统不能从指定的设备引导时选择该项PU/PD系统的默认设置为可以交换软盘驱动器的盘符Boot UP Floopy Seek (寻找软驱)当设定为Enabled时BIOS会检测软驱A:1011设定Numberlock的状态系统启动后小键盘数字有效系统启动后小键盘方向键有效Gate A20 Option(Gate A20选择)此项用来设定Gate A20的状态A20是由键盘控制器或芯片组硬件控制的默认值为DisabledTypematic Rate当键盘输入速率启用时字元输入延迟此项允许你设定持续按下某一键时安全选择设定值描述System在用户启动系统或设定程序时都要求输入密码APIC Mode此项用来启用或禁用高级可编程中断控制器操作系统MPS版本控制报告软驱情况WIN9X是否显示软驱12永不停顿的浪潮英信服务器 英信NP50此项设置启动时是否显示EPA的Logo3高级芯片组设定DRAM Date Integrity Mode根据安装的DRAM类型选择ECC或者NON-ECCDRAM Frequency For(内存频率)此项允许你选择内存的工作频率设置Enable可以提高性能Video BIOS Cacheable (显示BIOS缓存)此项设置显示的BIOS缓存Memory Hole At 15M-16M你可以将系统内存中此空间保留给ISA适配器ROM13延时处理预设值是EnabledDelay Prior to Thermal(热量延时预设)此项设置CPU热量处理部件的系统延时时间AGP Aperture Size(MB)此项控制RAM中有多少可以分配给AGP作为视频显示用Onboard LAN Control4建议使用默认设置永不停顿的浪潮英信服务器 英信NP50板载第一第二PCI IDEIDE Primary/Secondary Master/Slave PIO (IDE 第一/第二主/从 PIO)这四项允许你设定板载IDE控制器所支持的四个IDE设备的PIO预设值为EnabledUSB Keyboard (USB键盘支持)此项用来设定是否允许系统使用USB键盘/鼠标预设值为AUTOInit Display First此项规定那个VGA卡作为主图形适配器预设值为EnabledPOWER ON Function(开机设定)此项设置系统开机的方式PasswordMounseRightBUTTON ONLY预设值为BUTTON ONLY1451516永不停顿的浪潮英信服务器 英信NP50选择该项PU/PD默认设置为ACPI Suspend Type (ACPI 挂起模式)此选项用来设定ACPI功能的节电模式POSS3预设值是S1Power Management (电源管理)此选项用来选择节能类型Min SavingUser DefineVideo Off Method(视频关闭方式)此项用来设置视频关闭的方式V/H SYNC+BlankDPMS挂起时视频设置是否关闭视频Suspend Type(挂起类型)设置系统挂起类型Power On SuspendSuspend Mode(挂起方式)此选项用来设定系统挂起方式Standby关硬盘延迟可选项有1103060MinutesOff by PWR电源键功能设置系统的动作4系统掉电设置17此项设置电源掉电后恢复时系统的状态是开机还是关机CPU运行速度下降的百分比USB Wakeup From S3这些选项用来规定当检测到来自硬件周边设备或者组件的活动事件或者输入信号6PnP/PCI配置Reset Configuration Data该选项用来给设备配置系统资源预设值为DisabledResource Controlled By(资源控制用于)如果把此项设置为Manual(手动)手动Item HelpMenu Level >Phoenix AwordBIOS CMOS Setup UtilityPNP/PCI ConfigurationsReset Configuration Data [Disabled]Resources Controlled By [Auto]X IRQ Resources [Press Enter]PCI/VGA Palette Snoop [Disabled]:Move Enter:Select +/-/PU/PD:Value F10:Save ESC:Exit F1:General HelpF5: Previous Values F6: Fail-Safe Defaults F7: Optimized Defaults永不停顿的浪潮英信服务器 英信NP50选择特定资源ESCDManualIRO Resources(IRQ资源)此项仅在Resources Controlled By设定为Manual时才有效PCI/ISA PNP和Legacy ISAPCI/VGA Palette Snoop(PCI/VGA调色板侦测)当设定为Enabled时可选项为Enabled 和Disabled7PC健康状况风扇状态和整个系统的监测信息/89℉Current CPU Temperature 481819Current System, CPU Temperature/System, Power and CPUFan/V core/ 3.3V/+5V/+12V/-12V/VBAT(V)/5VSB(V)此项用来显示CPU风扇系统关机CPU温度系统警戒机制将会关闭系统8频率/电压控制CPU Ratio Selection此项用来设定外频和处理器内部时钟频率的倍数关系Auto Detect PCI Clock 此项是启用或禁用对系统中PCI总线时钟频率的自动侦测功能Spread Spectrum(频展)Item HelpMenu Level >Phoenix AwordBIOS CMOS Setup UtilityFrequency/Votage ControlAuto Detect PCI Clock [Enabled]Spread Spectrum [Enabled]CPU Clock(Mhz) [100]CPU Voltage Regulator [Default]ORAM/AGP Voltage Regulater [Default]:Move Enter:Select +/-/PU/PD:Value F10:Save ESC:Exit F1:General HelpF5: Previous Values F6: Fail-Safe Defaults F7: Optimized Defaults20永不停顿的浪潮英信服务器 英信NP50此项设定主要是为了减小电磁干扰CPU FSB Clock(Mhz)此项规定了CPU前端系统总线的频率加载最小化缺省值选择上面选项时Phoenix-AwardBIOS CMOS Setup UtilityStandard CMOS FeaturesAdvanced BIOS FeaturesAdvanced Chipset FeaturesIntegrated PeripheralsPower Management SetupPnP/PCI ConfigurationsPC Health StatusFrequency/Voltage ControlLoad Fail-Safe DefaultsLoad Optimized DefaultsSet Supervisor PasswordSet User PasswordSave & Exit SetupExit Without Saving ESC Select Item F102110会出现下面对话框 选择上面选项时能提供优化过的Phoenix-AwardBIOS CMOS Setup UtilityStandard CMOS FeaturesAdvanced BIOS FeaturesAdvanced Chipset FeaturesIntegrated PeripheralsPower Management SetupPnP/PCI ConfigurationsPC Health StatusFrequency/Voltage ControlLoad Fail-Safe DefaultsLoad Optimized DefaultsSet Supervisor PasswordSet User PasswordSave & Exit SetupExit Without Saving ESC Select Item F10永不停顿的浪潮英信服务器 英信NP5011.设定管理员/用户密码Quit Save & Exit SetupChange/set/Disabled password选择上面选项后最多8个字符2212.保存后退出Quit Save & Exit SetupMaximum system Performance configured but with potentialComtatibility/stability risk选中该选项出现如下菜单SAVE to COMS and Exit (Y/N)?YY"就能退出程序并且保存用户对CMOS的修改N"返回设定程序23永不停顿的浪潮英信服务器 英信NP5013.不保存退出Quit Save & Exit SetupAbandon All Datas选中该选项出现如下菜单Quit Without Saving (Y/N)?YY"就能退出设定程序并且放弃对CMOS的修改24252.2 主板跳线设置2.2.1 主板跳线一览图图2.2.12.2.2 主板跳线简介1位置如图2.2.1中FAN所在位置各接线端的定义如左图2.2.226永不停顿的浪潮英信服务器 英信NP502J27 CMOS跳线1,3: Hard drive LED (硬盘指示灯)2,4: Power LED (电源指示灯)5,7: Reset Switch (系统重启开关)6,8: Power Switch (电源开关)11,13,15,17: InfraRed (红外接口)12,14,16,18: Speaker Switch(蜂鸣器开关)135791113151724681012141618表2.2.3位于主板下边靠左的J27是连接机箱前面板上一些指示灯其引脚定义如左表2.2.3所示CMOS跳线有三个引脚1 默认2 清除CMOS由于误操作导致系统出现问题或者忘记系统开机密码以及要清除CMOS时3引脚1从插座上拔下电源线插头 用跳线帽短接23 把跳线帽恢复到1 连接好电源线123表2.2.4274JP42Disabled3Enabled ATI Rage XL显卡控制器1 板载显卡使能2 屏蔽板载显卡 表2.2.66JP62Enabled3Disabled USB接线排123123123表2.2.8 引脚 引脚定义说明12345123451= Power In (+5V)2 = Signal Out3 = Signal In4 = GN D5 = GND共可以接两个USB设备永不停顿的浪潮英信服务器 英信NP5082829第三章 系统硬件本章将指导用户如何安装系统硬件静电释放可能损坏服务器组件对静电释放进行防护是必要的一定要按照以下方法进行手腕上戴一个接地的防静电环用手持拿板卡时,注意只拿板卡的边沿3请放回各自的防静电袋持拿处理器时一定不要直接用手接触处理器的引脚1断开交流电电缆2支持MPGA478 ZIF封装的处理器 当安装处理器时把处理器的引脚和主板上的Socket 对准注意一定不要用力放注 意永不停顿的浪潮英信服务器 英信NP50置合适后如图3.1.2所示30 4然后用固定卡固定在风扇支架上散热片风扇上的电源线必须是三针插头处理器和散热片之间一定要接触好最终可能损坏系统硬件31永不停顿的浪潮英信服务器 英信NP506将机箱安装好请使用经过我们测试认证的相应型号产品在安装内存条的时候否则会损坏内存或主板的内存插槽关闭系统电源2如图3.2.1所示把内存条垂直插入内存槽中轻轻按下内存条注意把两边的卡销卡上3233图3.2.24将机箱盖及面板安装好为确保系统的稳定性否则硬盘容量辨识不全) 关闭系统电源2将其放在硬盘支架的合适位置3如图3.3.1所示永不停顿的浪潮英信服务器 英信NP50图3.3.1 4将机箱盖及面板安装好在扩展安装PCI或ISA接口的扩展卡时1断开交流电电缆打开机箱 移走与要使用的插槽对应的后档片 将板卡插入主板的扩展槽 用螺丝钉固定5将机箱盖及面板安装好34第四章 IDE RAID 系统4.1 IDE RAID 设置一开机启动检测FastTrak133(tm)BIOS Version 2.xx.xx (Build XX)(c) 1995-2000 Promise Technology,Inc.All Rights Reserved.No Array is defined..........Press <Ctrl - F> to enter FastBuild (tm) Utility orPress <ESC> to continue booting .........2FastBuild(tm) Utility 1.xx(c) 1996-2001 Promise Technology,Inc.[Main Menu]Auto Setup .........................................[1]View Drive Assignments ..............................[2]View Array .........................................[3] Delete Array .......................................[4]Rebuild Array ........................................[5]Controller Configuration ............................[6][Key Available] Press 1..6 to Select Option [ESC] Exit35永不停顿的浪潮英信服务器 英信NP50二自动设置按键进入Auto Setup菜单 [Performace]Typical Application to use ] Up [,菜单中[Auto Setup Options Menu]为可设置部分阵列创建步骤如下设置阵列类型选中项或空格键各参数表示意义如下 Security2Performance选中项或空格键各参数表示意义如下3637DESKTOPSERVER A/V Editing34如果是创建RAID1,保存设置后将提示Y选择创建并复制Please Select A SourceDisk回车回车Y系统提示并显示复制进度条系统提示如果不复制N只选择创建注 意Do you want the disk image to be duplicated toanother?(Yes/No)Y - Create and duplicateN - Create OnlyStart to duplicate the imageContinueAbortDisk duplication completed永不停顿的浪潮英信服务器 英信NP50然后按任意键重新启动机器 View Drive Assignments 在主菜单中2View Drive Assignments可以查看磁盘的分配情况以及其他信息Drive ModelAssignment四创建阵列 按键进入菜单菜单如下]Up [3839查看阵列步骤如下 通过上进入下图所示菜单Delete Array在主菜单中按键进入Delete Array菜单菜单如下FastBuild(tm) Utility 1.xx (c) 1996-2001 Promise Technology,Inc.[View Array Menu]Array No RAID Mode Total drv Capacity StatusArray 1 Stripe 1 81964 FunctionalStripe Block 64 KB Gigabyte Boundary]Up [40永不停顿的浪潮英信服务器 英信NP50删除阵列步骤如下 使用上2系统提示根据提示4退出菜单并重新启动机器Rebuild Array如果RAID1和RAID0+1阵列中有一个硬盘出现故障会有阵列出错的相关提示使RAID阵列恢复正常1启动机器35FastBuild(tm) Utility 1.xx (c) 1996-2001 Promise Technology,Inc.[Rebuild Array Menu]Array No RAID Mode Total Drv Capacity(MB) StatusArray 1 Mirror 2 38172 CriticalArray 2 ------- ------- ------- -------Array 3 ------- ------- ------- -------Array 4 ------- ------- ------- -------[Key Available][]Down [ESC]Exit [Enter] SelectAre you sure you want to delete this array?Press Ctrl - Y to Delete4按回车键继续在[Select Drive for Rebuild]列表中选择磁盘6重建结束后七控制器配置按键进入Controller Configuration菜单FastBuild(tm) Utility 1.xx(c) 1996-2001 Promise Technology,Inc.[Adapter Configuration -- Options]Halt On Error B I/O Port B I/O Port ,在菜单中Halt On Error通过空格键设置控制器出错后默认设置为即当控制器出错后41永不停顿的浪潮英信服务器 英信NP504.2 FastTrak监视程序FastTrak监视程序提供了在Windows系统下对磁盘阵列及控制器状态的监视功能 安装监视程序该程序支持Windows操作系统下的安装程序文件在蓝海豚导航软件随机光盘的\drivers\Other\Fasttrak目录中运行Setup.exe程序二开始程序PromiseFasttrakFastcheck MonitoringUtility程序界面如下图所示4243界面上部有三个选择功能标签控制器1阵列显示如图4-1界面选中左边框内的阵列RAID模式状态等点击创建阵列的磁盘状态位置如图4-2所示控制器在图4-1界面中点击标签44永不停顿的浪潮英信服务器 英信NP50图4-3在该界面中可以查看IDE RAID控制器的有关信息BusMaster基地址硬件类型等选项在图4-1界面中点击标签图4-4在该界面中可以设置监视程序的有关选项 通知系统的响应方式 重建设置以及重建速度 PCI 总线利用率D设置阵列中是否进行磁盘的同步检查E设置阵列中磁盘是否启用写高速缓存和S.M.A.R.T检查选项45。
abb工业机器人协同动作应用手册

Robotics Products Se-721 68 Västerås
瑞典
目表
目表
手册概述 ............................................................................................................................................. 7 产品文档,IRC5 ................................................................................................................................. 9 安全 .................................................................................................................................................... 11
应用手册 MultiMove
Trace back information: Workspace R15-2 version a20 Checked in 2015-10-22 Skribenta version 4.6.176
应用手册 MultiMove
RobotWare 6.02 文档编号: 3HAC050961-010
3.2.1 Controller参数域集合 ................................................................................ 30 3.2.2 Motion参数域集合 .................................................................................... 32 3.2.3 I/O参数域集合 ......................................................................................... 33 3.3 配置示例 .......................................................................................................... 34 3.3.1 “UnsyncArc”的配置示例 ............................................................................ 34 3.3.2 “SyncArc”的配置示例 ............................................................................... 36 3.3.3 输入/输出配置示例 ................................................................................... 38
Profile_P3_Manual

•
A high resolution colour screen that enables up to four trip coil profiles to be simultaneously displayed on for immediate onsite analysis Intelligent power management system which – Directly powers the DC clamp Conserves power so that the handheld can operate for up to eight hours without an external power supply Detects if batteries are rechargeable and recharge as required Enable the handheld to be left armed for a prolonged period of time
•
• •
Key Features of Profile P3 Handset
September 2010
ห้องสมุดไป่ตู้
4 3. Main Screen There are 3 distinct areas within the main screen as follows – • The Application Header is used to display most of the basic handset operation information and is always available on the top part of the screen. le screen The Main Application screen is where the details associated with performing a test and analysing the results in both tabular and graphical format are viewed. ts The Application Footer displays a fixed set of 5 ‘soft’ buttons corresponding to 5 Fun Functional keys on the keypad. These are context dependent and each button will correspond to an action available for the each current screen.
雷赛BASIC编程手册v2.1
3.2.7 STOP ...............................................................................................................18
3.2.8 AUTO..............................................................................................................18
3.3.1 运算符.............................................................................................................19
3.3.2 ABS.................................................................................................................22
3.2.3 SUB.................................................................................................................17
3.2.4 ON GOSUB ....................................................................................................18
雷赛运动控制器 BASIC 语言编程手册
Version 2.1
REIS手臂机器人操作手册Operating manual_CN

BRAKE_TEST Axis:<Bitcode> BRANCH Label: <name>
C
C <string> CALC_REL Vector: <Vname>, #TOOL(#POSITION) CALL Name: <Name> CENTER Point1: <Pname1>, Point2: <Pname2>, Point3: <Pname3>, Center: <Pname4>, Radius: <Rname> CONST Name: <I(Rname)>, Value: x(n.n) COPY Sorce: n.n, Dest_Var: <Pname.cellname> COPY Sorce: _LNULL, Dest_Var: <Lname> COPY Sorce: _VNULL, Dest_Var: <Vame> COPY Sorce: -10.0…+10.0, Dest_Var: _RANA_OUT[1…22]
操作手册
内容
机器人坐标系 (Robot coordinates)
移动键 (Movement keys)
运行模式选择匙 (Key-operated switch)
测试模式 (Test operating modes)
功能介绍 (Function survey)
命令介绍 (按字母顺序) (Survey of commands in alphabetical order)
第一步
输入目录名 输入程序名
EDIT(2)
第二步
第三步
WEDO-...-6... 方向控制阀门说明书

4/3 and 4/2 Directional Spool Valves, ISO Size 03Q max = 80 l/min, p max = 350 bar Direct acting, solenoid operatedSeries WEDO…1/7Reference: 400-P-181110-EN-01Issue: 08.2021S For controlling the starting, stopping,and direction of a flowS Manifold-mounting design, interface to ISO 4401-03-02S Operated by DC or AC solenoidsS Very reliable functions and extremely stable S With manual overrideS Solenoid coils can be changed quickly and easily without leakage from hydraulics system.1DescriptionThe WEDO-…-6… series of directional spool valves are solenoid operated, direct acting, manifold-mounting valves with a size 03 interface to ISO 4401-03-02. The main components of the valves are a steel body, either one or two solenoids, the control spool, and either one or two return springs. In the non-operated state, the return springs hold the control spool in the middle position or initial position. The control spool is operated by the DC or AC solenoids, whichare of the oil-immersed type. The integral manual override can be used to move the spool without energising the coil,for example during a power failure. These 4/3 and 4/2 directional valves are used in plant and machines to control the direction of a flow, and to stop the flow. The slip-on coils can be replaced without opening the hydraulic envelope and can be positioned at any angle through 4x90°. The version WEDO-42-C-6... is fitted with a mechanical detent setting.2Technical dataGeneral characteristics Description, value, unitDesignation 4/3 and 4/2 directional spool valvesDesignflange design, direct acting, electrically operated Mounting method 4 mounting holes for M5x30 mounting bolts(valve mounting bolts supplied with the valve)Tightening torque 5.2 Nm ± 10 %Size size 03 interface to ISO 4401-03-02Weight- valve with one solenoid - valve with two solenoids1.60 kg2.10 kgMounting attitudehorizontal recommended(vertical mounting makes air bleeding difficult)Ambient temperature range-20 °C … +80 °C400-P-181110-EN-01/08.2021Series WEDO…2/7Hydraulic characteristics Description, value, unit Maximum operating pressure - ports A, B, P - port T350 bar 210 bar Maximum flow rate DC AC80 l/min 60 l/minFlow direction see table “Symbols / Spool types”Hydraulic fluidHL and HLP mineral oil to DIN 51 524;HEES biodegradable fluids;for other fluids, please consult BUCHER Hydraulic fluid temperature range -20 °C … +80 °CViscosity range10…500 mm 2/s (cSt), recommended 15...250 mm 2/s (cSt)Minimum fluid cleanlinessCleanliness class to ISO 4406 : 1999class 20/18/15Electrical characteristics Description, value, unitStandard - Supply voltage 12 V DC, 24 V DC / 110 V AC, 220 V AC (50 … 60 Hz)Supply voltage tolerance ± 10 %Ambient temperature range -20 °C … +50 °C Nominal power consumption DC AC 30/31 W energising 225 VA (RMS) / holding39 VA (RMS)Switching time bei 40 l/min, 175 barDC AC45 ms (energising)28 ms (deenergising)15 ms (energising)23 ms(deenergising)Depending on pressure, flow rate, pressure drop and viscosity as well as dwell time under pressure, the switching times may vary from the the stated values.Relative duty cycle100 %Protection class to ISO 20 653 / EN 60 529IP65(with appropriate mating connector and proper fitting and sealing)Electrical connectionDIN EN 175301-803, 3-pin 2 P+E (standard)for other connectors, see “Ordering code”400-P-181110-EN-01/08.2021 Series WEDO…3/73Symbols / Spool types400-P-181110-EN-01/08.2021Series WEDO…4/74Performance graphsmeasured with oil viscosity 33 mm 2/s (cSt), coil at steady-state temperature and 10 % undervoltage Δp = f (Q) Pressure drop - Flow rate characteristicA, B, C, D, F, G, H and J spool0Q [l/min]60504030201024681012p [bar]P0434.ai43215678Spool type Flow directionP % A P % B P % T A % T B % T A % B B % A A / B / C 66–55––AN / BN / CN55–22––D 55–22––F 6* 46** 4–337 + +7 + +G 66–3* 13+ 1––H 44 4 +22––J66844––*in mid–position, B closed **in mid–position, A closed +in mid–position, A + B closed ++in mid–position, P closed400-P-181110-EN-01/08.2021Series WEDO…5/7p = f (Q) Performance limits with AC-solenoid coil operating at 50 Hz0Q [l/min]60504030201050100150200250350p [bar]P0435.ai4321300Spool typeFlow directionA 2B 2C 2D 1F 1G 4H 1J3p = f (Q) Performance limits - wIth DC-solenoid coil0Q [l/min]80705040301050100150200300350p [bar]P0436.ai542120603235250Spool typeFlow directionA 3B 3C 3D 1F 2G 5H 2J4IMPORTANT!The indicated performance limits apply when symmetrical flows pass through the valve.For non-symmetrical flows, the max. flows are substantially reduced, in worst cases to 33%.400-P-181110-EN-01/08.2021Series WEDO…6/75Dimensions & sectional view4/3 spool valve (spring centred)4/2 spool valve (pulse signal, detented)1)4/2 spool valve (1-solenoid model, A or B side)± 5%M A Seal kit NBR no. DS-150-V 3)Item Qty. 5)Qty. 6)Description 144O-ring no. 012∅ 9,25 x 1,78N90212O-ring no. 022∅25,12 x 1,78N90312O-ringno. 213∅23,39 x 3,53N90IMPORTANT!1)With manual override 2)Valve mounting bolts M5x30(included in the delivery)3)Seal kit with FKM (Viton) seals no. DS-150-V 4)Required surface finish on the mounting face (valve pad)5)4/2 valves (1 solenoid)6)4/3 valves (2 solenoid)400-P-181110-EN-01/08.2021Series WEDO…7/76Installation informationATTENTION!Only qualified personnel with mechanical skills may carry out any maintenance work. Generally,the only work that should ever be undertaken is to check, and possibly replace, the seals. When changing seals, oil or grease the new seals thoroughly before fitting them.IMPORTANT!When fitting the valves, use the specified tightening torque for the mounting bolts. No adjustments are necessary, since the cartridges are set in the factory.7Ordering codeWEDO =42=43=… =6=V =1 ... 9=... =D =A=(blank)=M100=8Related data sheetsReference (Old no.)Description400-P-030101(i-30)Size 03 interface to ISO 4401-03-02E 2021 by Bucher Hydraulics AG Frutigen, CH-3714 Frutigen****************************All rights reserved.Data is provided for the purpose of product description only, and must not be construed as warranted characteristics in the legal sense. The information does not relieve users from the duty of conducting their own evaluations and tests. Because the products are subject to continual improvement, we reserve the right to amend the product specifications contained in this catalogue.Classification: 430.300.-.315.305.300。
FANUC发那科机器人操作指南
FANUC机器人操作指南1 机器人程序FANUC机器人程序分为TP、MACRO、CAREL几种类型。
TP为一般程序,用示教器可以创建、编辑、删除。
MARCO为宏程序,在设备调试完成后一般无需添加和编辑,需要时宏程序也可在示教器上创建、编辑、删除。
CAREL为系统自带程序,操作者没有编辑权限。
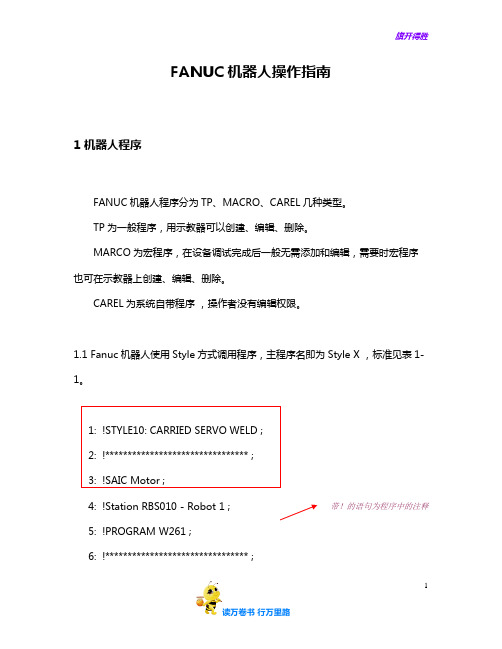
1.1 Fanuc机器人使用Style方式调用程序,主程序名即为Style X ,标准见表1-1。
1: !STYLE10: CARRIED SERVO WELD ;2: !******************************** ;3: !SAIC Motor ;4: !Station RBS010 - Robot 1 ;带!的语句为程序中的注释 5: !PROGRAM W261 ;6: !******************************** ;127: !ECHO STYLE ; 8: TIMER[1]=RESET ; 9: TIMER[1]=START ;10: GO[1:Manual Style Select]=10 ; 11: RESET WS 1 ; 12: CALL POUNCE1 ;13: CALL S10PROC1 ; 14: RUN CAP_WEAR ; 15: MOVE TO HOME ; 16: TIMER[1]=STOP ;17: WAIT (F[1:Capwear Complete]) ;表1-1 机器人Style 程序标准焊接子程序31.2 焊接子程序S(X)PROC(X)命名,如S10PROC1,其中S10代表被STYLE10调用,PROC1即为焊接PROCESS。
1: !******************************** ;2: !STYLE10: PROCESS1 ;3: !******************************** ;4: !SAIC Motor ;5: !Station RBS010 Robot 1 ;6: !PROGRAM W261 ;7: !******************************** ;8: !BEGIN PROCESS - PATH SEGMENT ;9: SET SEGMENT(50) ;10: UTOOL_NUM=1 ;11: UFRAME_NUM=0 ;12: PAYLOAD[1] ;4514:J P[2] 100% CNT100 ; 15:J P[3] 100% CNT100 ; 16:J P[4] 100% CNT50 ; 17:J P[5] 100% CNT50 ;18:L P[6:w261bs1115] 2000mm/sec FINE : SPOT[SD=10,P=2,S=2,ED=10] ; 19:J P[7] 100% CNT50 ; . . . . . .87:L P[72:w261bs1245] 2000mm/sec FINE : SPOT[SD=10,P=1,S=1,ED=10] ; 88:J P[73] 100% CNT80 ; 89:J P[74] 100% CNT100 ; 90:J P[75] 100% CNT100 ; 91:J P[76] 100% CNT100 ;焊点号,将机器人光标移到P[X]上,点击ENTER 键即可编辑。
Worlde Panda MINIc MIDI 控制器用户手册说明书

WEBSITE: TEL:86 571 88730848Worlde Panda MINI c MIDI ControllerUser’s ManualWEBSITE: EMAIL:****************.CN TEL:86 571 88730848■ContentsIntroduction (3)Features (3)Parts and their functions (4)Setup (7)Making detailed settings (7)Global MIDI channel (7)Keyboard CC mode channel (8)Transpose (8)Pitch bend speed (8)Key velocity curve (8)Pad velocity curve (8)Trigger pads (9)Knobs (11)Sliders (12)Keyboard operation in Edit mode (14)Specifications (15)WEBSITE: EMAIL:****************.CN TEL:86 571 88730848●IntroductionThank you for purchasing the Worlde Panda MINIc USB controller. To help you get the most out of your new instrument, please read this manual carefully.In order to use the functions of this product, you’ll need to make settings in the application you’re using. Make settings as described in the owner’s manual for your application.●Features●8 high quality velocity & pressure sensitive performance pads with RGBbacklit , can be assigned easily as pads, MIDI CC buttons or Program change switches.●25 keys with velocity assignable to controllers, with 3 velocity curve and oneconstant velocity● 4 assignable control knobs● 4 assignable control sliders● 4 banks for different settings●USB interface, adaptable to USB 2.0(FULL SPEED). Power supplied by USB.●Compatible with Win10/8/7/XP/Vista and Mac OSX. Drive free and hot-plugsupported.●Edited by the Panda MINI Editor, the picture below is the main screen.WEBSITE: EMAIL:****************.CN TEL:86 571 88730848WEBSITE: EMAIL:****************.CN TEL:86 571 88730848●Parts and their functions1. Trigger padsThese pads can transmit note messages or control change messages.Hold CC MODE and or to select the backlit RGB color of 8 pads, 7 different colors available.2. KeyboardThere are twenty-five velocity-sensitive keys that can transmit note messages. When CC mode is on, they transmit control change messages.3. MIDI control groupA knob, slider, are collectively called a MIDI control group. The Panda MINI has 4 MIDI control groups.⑥①②③④⑤⑦⑧WEBSITE: EMAIL:****************.CN TEL:86 571 88730848a. KnobThis knob transmits control change messages.b. SliderThis slider transmits control change messages.4. [OCTAVE DOWN] / [OCTAVE UP]The [◄] button and the [►] button can be used to adjust the octave acquiescently. The pitch will shift downward by one octave each time you press the [◄] button. The pitch will shift upward by one octave each time you press the [►] button.5. Bank buttonThe Panda MINIc has four banks. When bank button is on, you can use the [◄] button and the [►] button to switch the four banks. A “bank” is a set of parameter assignments for the controllers (pads and knobs, etc.). You can use Worlde Panda MINI Editor to change the assignment of each controller. (➞ “Making detailed settings”)6. Program buttonWhen program button is on, you can use the [◄] button and the [►] button to change the program.7. [PITCH DOWN] / [PITCH UP]The [PITCH DOWN] button and the [PITCH UP] button can be used to send a note’s pitch up or down in cents.8. Modulation buttonThe MOD button is used to introduce some sort of vibrato effect.9. U SB connectorConnect the Panda MINIc to your computer with a USB cable via this port.WEBSITE: EMAIL:****************.CN TEL:86 571 88730848●SetupMinimum System RequirementsWindows Mac OSPentium 3 800 MHz or higher Macintosh G3*800/G4*733 MHz or higher (CPU requirement may be higher for laptops)(CPU requirement may be higher for laptops)256MB RAM OS X 10.3.9 with 256 MB RAM,Direct X 9.0b or higher OS X 10.4.2 or greater with 512 MB RAMWindows XP(SP2)or higher *G3/G4 accelerator cards are not supported (Windows 98,Me,NT or 2000 not supported)●Making detailed settingsThe following settings cannot be edited on the Panda MINIc instrument, so you need to use the Worlde Panda MINIc control Editor. You can download the Worlde Panda MINIc control Editor from Worlde website .Global MIDI channelGlobal MIDI channel [1...16] This specifies the MIDI channel which Panda MINIc will use to transmit note messages. This should be set to match the MIDI channel of the MIDI application that you’re controlling.WEBSITE: EMAIL:****************.CN TEL:86 571 88730848Keyboard CC mode channelPiano keyboard CC mode channel is to specify which MIDI channel the keyboard will use to transmit control messages.TransposeIt is to adjust the pitch by semi-tone, adjusting scale of the value is -12~12.Pitch bend speedIt is to adjust the speed of the pitch up or down, adjusting scale of the value is 1~4.Key velocity curveIt has 3 velocity curves, the light, the normal and the heavy, if choose the CONST, the velocity value is const to 127.Pad velocity curveIt has 3 velocity curves, the light, the normal and the heavy, if choose the CONST, the velocity value is const to 127.WEBSITE: EMAIL:****************.CN TEL:86 571 88730848 Trigger padsDepending on the assign type, the trigger pads can transmit note messages or control change messages. For each trigger pad, you can individually specify the assigned message, the MIDI transmit channel, the behavior of the trigger pad, the note number, the control change number, the values transmitted when the pad turns on or off.Depending on its assign type, note number or control change number can be assigned to a single trigger pad and transmitted. If you transmit note messages or control change message from a trigger pad, all of the messages will be transmitted at the velocity or On Value/Off Value.WEBSITE: EMAIL:****************.CN TEL:86 571 88730848MIDI Channel [1...16/Global MIDI Channel]This specifies the MIDI channel of the MIDI messages that are transmitted when you strike the trigger pad. If you set this to “Global MIDI Channel,” the messages will be transmitted on the global MIDI channel.Assign Type [No Assign/Note/Control Change]This specifies the type of message that will be assigned to the trigger pad. You can disable the pad (no assignment), or assign a note message or a control change.Pad Behavior [Momentary/Toggle]You can choose one of the following two types of behavior for the trigger pad.Momentary The Note On or On Value will be transmitted when you press the trigger pad, and the Note Off or Off Value will be transmitted when you release it.Toggle The Note On or On Value will be transmitted alternately with the Note Off or Off Value each time you press the trigger pad.Note Number [C-1...G9/No Assign]This specifies the note number of the note message that is transmitted.Control Change Number [0...127/No Assign] [0...127]This specifies the control change number of the control change message that is transmitted.On Value [0...127] This specifies the value of the message that is transmitted when the trigger pad turns on.Off Value [0...127]This specifies the value of the message that is transmitted when the trigger pad turns off.You can set this only if the assign type is “Control Change.”WEBSITE: EMAIL:****************.CN TEL:86 571 88730848KnobsOperating a knob will transmit a control change message. You can enable/disable each knob, specify its control change number, and specify the values transmitted when the knob is turned fully left or fully right..Knob Enable [Disable/Enable]Enables or disables the knob. If you’ve disabled a knob, turning it will not transmit a MIDI message. Control Change Number [0...127]Specifies the control change number of the control change message that is transmitted.WEBSITE: EMAIL:****************.CN TEL:86 571 88730848Left Value [0...127] Specifies the value of the control change message transmitted when you turn the knob all the way to the left.Right Value [0...127]Specifies the value of the control change message transmitted when you turn the knob all the way to the right.SlidersOperating a slider will transmit a control change message. You can enable/disable each slider, specify its control change number, and specify the values transmitted when the slider is moved fully upward or fully downward.Slider Enable [Disable/Enable]WEBSITE: EMAIL:****************.CN TEL:86 571 88730848Enables or disables the slider. If you’ve disabled a slider, moving it will not transmit a MIDI message.Control Change Number [0...127]Specifies the control change number of the control change message that is transmitted.Upper Value [0...127]Specifies the value of the control change message transmitted when you move the slider all the way upward.Lower Value [0...127]Specifies the value of the control change message transmitted when you move the slider all the way downward.WEBSITE: EMAIL:****************.CN TEL:86 571 88730848 Keyboard operation in Edit modeT he twenty-five keys of the keyboard will function as independent buttons to transmit control change messages. You can specify which MIDI channel the control change message is transmitted on, whether or not each key is enabled, the key type, the control change number, as well as the On and Off value.CC MIDI Channel [1...16]This specifies the MIDI channel that control change messages will be transmitted on. Set this to match the MIDI channel of the application you’re controlling.WEBSITE: EMAIL:****************.CN TEL:86 571 88730848Key Enable [Disable/Enable]Enables or disables the key. If a key is disabled, operating that key will not transmit a MIDI message.Key Behavior [Momentary/Toggle]Selects one of the following two modes:Momentary Pressing the key will send a control change message with the On value, releasingthe key will send a control change message with the Off value.Toggle Each time you press the key the control change message will alternate between the On value and the Off value.Control Change Number [0...127]Specifies the CC number of the control change message that will be transmitted.On Value [0...127]Specifies the On value of the control change message.Off Value [0...127]Specifies the Off value of the control change message.●SpecificationsConnectors: USB connector (mini B type)Power supply: USB bus power modeCurrent consumption: 100 mA or lessDimensions (W x D x H): 12.6 x 7.5 x 1.6 inches / 320 x 190 x 40 mmWeight: 28 oz / 800 gIncluded items: USB cable, Owner’s manual*Specifications and appearance are subject to change without notice.。
Moore Industries STAR Center 产品说明书

ot · tiom r -_ ris -i ,e rUSEI ·,s I ANUAL J a nu a r y 2018No. 150-704-00 FTable of C ontentsIntroduction 1 1 3 6 0.sCfipt i on Calibration InstallationInstallation in H azardous Locations Specific Conditions of U se Maintenance & Troubleshoot i ng4S�LIVERY�llld kt � TOL L F REE 1-800-999-2900U n 'ei!d K ifio d OfflF REE PHONE0800 525107 ... , .... TOLL mEE008 261928l 06$0�CIO!ll.,...1 S..,wcll,, C.bN Ill� U .SA. ltt 18181 8'11,7111 • T Iii! 8S-JSt.i F�:(,18)891•2'1•OONt<et�WS(l'Ul.VEOA , uo,,,,. co...,,.� AoJo •, °'-"rW &u.-RH 1f)201J ,UriWld '°"domT -0'2li0 S I • ... • T tlc 87&67F AX:0:53�Moore Industries" STAR" C ent e r has a w i de variety of quaJ i ty instrumentat i on in stock and ready to s h i p .•S i gnal Transm i tters• Temperature Transm i tters • P /1 and 1/P Converters •Isolators and Converters • I nd i cators and D i splays • A l ann Trips•Integrators and Total i zers •Power Transducers•Instrument Power Suppl i es • R acks, Rails and Enc l osuresMost instruments can be custom i zed to m eet yoor needs. Even then, you·n never have to wa i t more than a few days.8118IntroductionMoore l ndustflos' IOO P-PQWe<ed P oteot l ometer Transmll1er, t he PTX, s a dev i oe u sed to converts1andard, three-w i r e pot entlomttor (poQ i n put 10pl'0p011i0na l curre n t output.Th i s ma n ual cont a i ns all o f the i ntotmatiO,n nt tded 10 ca l ibrate, CIS*'att, and m a i n ta i n lhe P TX. 11 al soi ncludes a brief descriptio n of t he u ni! and its c.apa·biti i es and oplk)n s,a llstlng of u n it specif ica t i ons, and a n overview o4 Moort l nct.,str l es' u nll data lraeklng system and lab eling.A A awe,ndix a.t l ht tnd � lhe manual provid es th9 tionnatlo n reql.A'ed tOJ l n st.al i ng N PTX i n h aJard·ous e n v i r ontl'ltf'IIS. Such inStaHatlo n$ r equ i r e o n e o l ht availab&e l n t.rl n sic S afety (S) o ptions. de scribed la1e<.I.Nhere they appea, a, '9lt1 o r f igur.s, "N OTES'" art uS6d to draw at t ef'lli O n to p taetioe s t hal cou l d olhefwiSe r esul I n lnoonv enienoes to t he user. "WARN· INGS" po i nt o ut practices that, u.-U avoic5td, could result in pe r so n a l injury,DescriptionThe PTX tra n srrittor is a va i l ab&t n e i ther a D IN-style, or Moo r e l rd.tst r i es'hOCMy·p.,ck (HP) hOus l ng. n measu r es variable reSiSUve l l'l)UI b y oon,parfno Input m i lli vo lt$ wl h 1ht drop across a n Interna l,pr ec i sio n vo l tage dMder. II p rovides co n stant voltage ox:cila·tlo n l o a Slanda r d, 3-wir e pot, and OUtpulS a p,opor·tlo n aS 4-20 °' 1 ()..50 mAcurre n t based on the pors w i pe r pos i tio n. t accepts� f rom any 100 10 10,000n.3-w i,e pot.The unil IS IOOp-powe r eCI (12·42 Vdc-). Some S options req.ii r e 12�24 or 12-28 V dc powe r i ng. Re:tet 10 t h& l n S1ala!ion Sect ion of th i s manuat f or i n lonnatioo on u ni e l9Ctrieal con n oeliOns.1"N a vai1'ble hOus l ng styles ro r the PTX, t he H P-o r DIN-style, a flon:I t he use, w ith a wide vatiely of mounthg options. I n additio n to lh8 Sland·ak>ne unil. mounthg hardware optio n s nclude tl3"0&$ l o, u se wih re l ay track O f surf a ce mount, e xp l osiOnptOOt enclosu r es,and NEMA bO xes. co n sult wh h you r Moore l nc:klstrics' Sa l e$ RepresenlaJ l ve fo r mo r ei nformauon o o ava�1e mounlfng h ardwa r e options.Pag e 1PTXTht HP•Style PTX. This styt& oC u nit S inl e nded 10 runot l on as a modutar rep&aoomenl n appllcatio ns whe r e conduit a nd encfO-Su res may alr e ady be i n place. when a special en closure i s n()1 1&qui-ed, or In appllcatlons where the O N•sty l e u n i t 1$ not otherwise appropri at e,l l i s atso avallab l e mou n ted in a separate, dQme<I, explos l onproof enclosure. secured n s i de with s pr�clips; n o drilli ng o, lapp i ng s r equ i red. Othe r r if·slo n s h:WG h;a,ctwsre l o r surf ace mounl and retay tractt1n sianatto n s.Tho D N·stYIJO PTX. Th i s style soaps on t o G·YP8 DIN rails (01N EN50035), I I ii most O lte n used In applic a lions ,e�l r l ng a la r ge n urrt>e, of units In are l atlvefy smal space. TeSl j adl.$ o n the t,o n t panel allow tor basic f uncliOn Check$ wtl hOOI having tor emove the PTX l rom the process l oop,Tab l e 1 IISls t he p erf o rmance and operat10n a1 speclfl. catio n s k>r M oo r e l ndustr i os' P TX. Flgv r e 1 shows the r elationsh i p between the po wer souroe u sed i n a PTX ai,s:lli l ion and t he u n it's load capab i l ity,Controls and IndicatorsLabe l ed pots 10 oo n trO unit zero and sp a n are located on !he fro n t p ane l o1 bo th the D N-and H P·sty l o PTX. The Calibration Sectio n Of t h i s ma n ua lde&Cflbes hOw these pois ca n be a djusted. Sc:,ec l l'lcatiOns to r ad j uslabll ity appea r in table 1,OptionsThe follow i ng li SI provides a n oveNlew o f some of the PTX optio n s. Comp&e l e n formatio n o n mour¥i ng harttNam and f unclion&optio n s, o r curr80lfy avaiable c ert ll icatio n s and approva l s is avalab l e trom yQUr Moore l nd.Jstries Salos ROPf0$0nlatlv e. Usef'S may also con tact the factory Clite,ct l y at 1--800-999-2900 in t he U.S.A.IS(X) o,mo n-Intrinsic Sa lety.U n hs equi pped w l l h options such a s tSB and SC a r e rna n ufac:tu r eo acoo r d l n g 10 t he specifications of thit'di)any cenlfy l r q agencies l o meet vamus teQJitements 10f l nt r l n s l·cally safe flsta11ation i n haza r(IOus e n viro n me n ts. Refe r 10 lht PTX d�l{I Sheet.o r consu l t the lactory lor i n lo,tmalion on currenl IS oe rtif i cali0n$,Page2PIXno,-1. PTX Pa tformaf'IC6 and Opa ratlonal Spec{fica6onsCh1ractertsUc:Spectr J ca U o n slnpY t k i t e poientlome,1-rtated f rom 0·100 O to 0-10,000 a Sen.« Current; l mA,, maximumftan9e:M i n i mums,�n Is 15%0, potv-.i•. Mall l n-..m o'™'t l o r � 18 (t00%• -0%')-10%• po l v a l ueo u t putF eic.Ory-.ML 4-20 m A 01 10-50 m Aacco rd in g ID ou s llo m or spoc il icmion ill li mo or otdo r Limit ing: ,.20 m A units 1rnc.d 10 30 m A . maxltnl.lTI 10-so m A 1,W!h & fm l � 10 65 fflA tnax lmu m .... ,12-42 V d oSome IS options require other pow9r r.i�. Refer to � o r <XltliUII wllh your Moor• fndustlios' Sa l es Ropte:Mnlilllv• l or (l etah,,M ax im u m : Un l e3n s lJSIUI u p to 80 V do w l hio ut darn a g ci Contro l •Z.ro : Labs l ed pot o n f ron t p,;,M,I pn,v ido s ad ju stmcinl ID O"-o f ou!p t.C s p an 11()%. wit h O"-l'l pu tZ.ro Ran g •: Min1nwm zero Is 15%Cf inputpo t v aruo Spa n : Labo l od pot on f lQnl panel .cl j i..1, f u ll «* 10 100%PlorformanoeAccuracy: i-0.1% ot tplVI ltldud l ng l nta r ly at'l d 1tp&atabifty Load Capebllity: Sae r-.;w• l Loop Load t Un• Voflege) E H•ct: :t0.002'% oC span 1)61 VOl tel\tlnge, as m.asured' at the inpultarmilalsA ,,..,._. T empe r •t w e Effect : .t0.01%oi s pan po, •F c h ange Env 1r on me n ia JA � Amb i e n t �allng Tem p e r a1u,. Rango : -29 lo 82•c (--20 ID 1so •F )Rat ingWe l g :11HP.atyto : Appw l m .i !el)' 141.8 g (5 Ol)O I N •aty le : App 10x i m a,8'y 224 g {7SI OZ)NOT ES : 1. Consult your Moo re Industrias'$"" Rop,ettnlllllve l or Information Ct'I 81)41(:IIM!tlliof'lt. Pf lc l ng a nda vailabii t y oi oplions .2. Rotor to the In stal l ation 1on t or PTX outJne <f lll'let1sbne.RF Op tion -RadiO F rllQUOllcy a nd Elec.tromagnetlc lntorlerence (RFVEMI) Filtering. F1Jielf:d term i na l sand cuep rovid0$50 V/m eter. a bc:. 0.1% of f u ll ·sca l e s p anWhe n I H1ed aocotd i ng 10 PMC SAMA SUtfldard 33. 1,RTB Opflon -Removeable Terminal BIOCk. Pt0videst o r unn rep1a,Cemen1 w ithoutw i ri ng d i soonnect.J>W l i eable to 0/l'ktyte PTX�on,y.untt D ata Tracklng -ModCIJSOfla l NumbOr. MooroI ndustr i es keeps a record o l pr oduct l nlorma!io n on overy u n i t sold or s ervioed. Th i s record Is keyed t o I .he u nl model and �l'iO l ,.,.rr(lers.On DIN·$1)11e PTX's.. IOOk l ()t the model and st.ria l nul Tber& o n one o l the hous i n g side pane l s. The l ab e l on HP·Sly l e u n i ts i$ found c,1th0r on tho unit beck or front paneJ.Page 3P TX2400 ----..-----.------,-----.----�::!l:IO l-----------�-----1-..;,..._---+------...111"--'2000 1----"-----li-----t....&,,.. __ ...a..,,6.. __The e-xa"l)le on'Ll'lo following page '5how.s a tvpt:alP rx m::idei n umbor, breaking out ils �tq 1l e ltb forl ustr atb n purposes. Actor kl lh8 example Indeeil)l'lnt i ng the mode l n�r on your unil.H sol'Yice a6i&is1anc e Is ever fl oct u i rodl. m.ae e na1e or11'16 unit. model 1a1�er 1:1e,or-e contacti n g Lhe factory.1For rast:Ht as.sis t e nce. �l s.o no t e 100 IJf'lil t.oriaJnu l'l1'0r, o b 1a1n1Jer, and llrJe purCM$ ord'et mr.JEBrl.ffido, whic:.h it waS :shtppea. TlliS lntormatiOn assls1slh r ac:,o,y tepresenJetlve n p110viding )'OU with �heMS-wors you need a� e i1ilcie n l'.ty as po:s.sil1e.CalibrationP rio r 10 5h lpme n1, every P1X is m u ly t es.1e d IO enrureco mpliance with Moore lndustrles· slr1d Cl,.JaliLyoontfol ,guidelines. ee1·01e n s1al l3l lo ri, �·ov e r. yourunH(s) :smuld be benc h �ed In order to sol andwrir)r Lhe desired operamlng levels..This procedure should b e oonal!docJ in an o nvwo nmont co ns ide r ed awropriete •or general l es t� 04olcu::tronic atu:I pnel!lmatic equipment I t Is recomrnoncted lha11he pl'Dcedure5 In lhls :s.ea l o n no, beca rr i e d Otl'I In the IT-e.ld. Use a technician� ti cncn orin a Simi l a r lab-type selup, SQ lhat any u n i1 damag�um rnay have occt.1fifed during stilpmenll can bediS'.t'XMU ecl !iilfely, h.e., s:ewate-ll lrom tile lntcn(t(ldprocess 01 applfcstlon.POQG4PIXI EXAMPLE IPTX / 1K--0-100 / 4-20MA / 12-42DC / •RTB ·RF [HP)�--a�Unit T ypeTota l Res i stance of Po 1anOometer % o t PotonliOmoterTrave J IOObta i n0% O utpu1'Yo o t Poienlk>meter T rave l to Ctita l n F ull·&eale ( 100%) Outpu1Powot Optlon(s) Hou$1ngCalibration SetupTab l e 2 l ists t he OCJJ i pment you wil l ne&d to calbrate the PTX . These i tems aro not �plied by Moore Industries. rut shOuld be ava i lable I n env i rorwnents qua l if i ed to p erform the p,ooodure.'Ille termila l s t01oo mection of the c aM>rat i on equ i pme nt ate located on the unit fronl panel. H P · style un i ts U$O a she-place, n orrt>ered terminal block w i th term i na l 5 fl'l acttve , O I N·style units aJso h ave a six-place terminal l*x::k w ith the non-labeled l &rminal inadive. The term i na l s on both types of uM a e clear l y labeled.. Use +PS and -PS tOJ connection of the approp riate loop po wer and term i nals ·A·, "8", and ·c· t or conn(lclion o t pot i npu t Flgure 2 i ltlstra t es the hookup I Of standard PTX callbrat l o n The desfgnator "f\ • r efers to the eppn,.prlate p,ec:lslon res i stor.use the appropriate materials listed I n t l)ble 2 I n the l�up, app l y appr opriate power , and allow approx:!·mal e l y 5 m i n..r les for unil w�up a n d hoolQJp scab i llzaUo nCalibration ProcedureWith l he �l bratlon s etup c�l et8d as ShOwn. set bolh decade resistar.::e boxes to p rov i de z ero ohms ot res i stance. apply t he appropl'iale 10-42 voe powor , a nd 1um both the Z ero and Span pds on tne 1ro n t panel 011he PTX tu.lly oo unterdock w ise. AllOW appmximate l y l l ve m i n utes tor u n i t warm�p and se.tup stabi i z.a l i o n .1.Se1 d ecad e box A l o p r o v id i&r &&i s t a noo eq u ro to th e va l ue catted o ut in t he "% T rav el M>, 0%Ou 1pu1" fi e ld 01 vour un � mode l nu mbe r:2$e l box B t o v a ll e spec ified i n ..,..lo T r ave l t o,1� 0\11pur t l eld o f u nit mo de l num oo rFOR E XAMP L E ;For a PTXw i th •1K �25.75� l i st ed t n mo d elrunti er, s et d ec a de bo x A to 250 n afl(f b O x B t o p(OV lde 750 0.PIXEqufpment Spff:1Jle1Uo11sAlli.tafl� De.Id� BoltH Oallbnlted. Aeeura1a 10 :f0.05� mlnlrrwum.(2, Reci;,mm9.lld ESDI l!)Qieiibo• mock! 0862, or a:puivi1klnL00Vi:111milr GaJibtatiid. AIX.Ul--mei to :t0.005%. mlrinwm.Rocomrn a tal' K•lliikly mod 197, or e,q,ut.ralent.PIKl11Gn AN111or 2.50ll, ±0..01 ,I,. pr«lJl:!11 re 'klr 1or 4-20 mA L!llit5,1000. ±0..01 % remicr ior 1 o-5(1mA unia.P'Jw,arSoura C albr�id. Vwbii &Quro9 � of r�utz lm O:tJlpJ L .in Om12-42 Vdc r�.SCNwdmta-, Bli!dlili "'1idlh 2..5-4 rJlril [O. 1 ntti�. trWIITIIJffl.(·ilO� � ·�pt)10 0 0 0,,1 A10 0 0 O�I CDECADE R0!1STAHJC!;! BOX D3.14m zero pol CIOCkvdse u fMJ I' vottmeter reads 1-V, t-4mV,"· C:ti:ange "1t l PCJo• �e 'bo x A.Jo.pro,yli1ereSi:S t anc_p �Nd In stop 2 {% T tavel lor 1g o%� ft(!� �I 11R.inlb$r).PTX-5. Set decat;lel box B to Y al.Je 1rom s tep 1 t'¾ Tr.aveS.Of 0%}.X'.PS I I +��2\100l?OWEA,SOt.JACE-ff AV J\V� -DCVOLTMETER6.li'Um Span r::tOt" �lae U1iTII YOltrne'ler reads SV,.±4 mV.7.Aepeet s.1eps 11hrough 4 uhtll PTX oo1iiut is x:stable at !»In O¾o aoo l\ull-seale Input.8.Check linearity D')' cal'cula1ing 25%. 50'%, arid75o/ii o t ratod span W"h On setting on decadeto� 13-, set box A to eech level derived fro.,, tt.esucalcula11oPS.. error In u n o u t p u l wiU not ttxoood'0. 1 % 01 span.Pago 6PIXInstallationI nstallation of th e PTX i s p,osent.Od � th i s matlJa l i n 1w o phases. FirSI Is t he physical m ount i n g o f th eu n i t This I s fo l low e d by the e tectr l ca l con n ectio n s. hi s recommondod that i nsta.ll alion bO ca tfiOd out 111 lhlsotdOI.Befor e PTX I n st a llation.• l s 61tong l)' rec:olffll e nded that each urjl b e bonCh choeked,Re'lot to thei nstruct i ons f or triS p rocOOJte i n the C alibra t ion Stction, ea r l iet i n t h i s marua1.Atso. any requ i romenlS I Ot NMSic satoty i n t he Nended application must be considered.Intrinsic Safety Considerations Electrical ConnectionsF,gul'O 5i s the PTX �stall a t l oo hOokup d i ag ram. Wh e n th e u n it s have been ptOPOrty mou rned, ref e r to figure 5 t o connect them to power and other t l ekt devlees.As l he PTX i s a loop-pow e ted dO v iee n o addlllonaf elect r ical oonnecOons art re,qu l recl. Check t he "Powe,. l retd 01 vour u n lt'S mod e l n umber to venty appropr i ate IOOP volage.R e f e r 10 th e exp l anation Of the model n.,mt>er In t h e Oescq)tion S&ctiOn of th i s maf' l, and 10 th e speciica6ons liStOd i n l able 1 lor mor e I nforma t ion.A s s how n I n 1he f i gur es con n oct t he +P$ term i n a l of lhe PTX to the po sit i v e� tmm the power souroe In t h e loop. Co n n ect the -PS PTX torm l nal I n ser l e$w ith t h e pos i tive torm i n.alS or the other de v ices I n t he loop and th& negative term i nal of the loop power suppty.The po1enti0motcr w i t i ng I s oonnected to th e term ina l s ta be l Od A B.and c.Connoct.-.g w i te.s u se<I ShOu l d b e betw e e n,,. a n d 22 AWG.Connections are mad e w i lh oomprossiOnscrew socket s Use a slott e d·l:4> screwdl'Worwilh a head w idth n o g r e at e r lhan 2.54 nm (0,1inch). Ground i ng. To ground the HP·Sly l e unll. m ake s u,e a shie lded g rounding lead iS c:onnected to the GND screw o n l h8 u nit front panel Th i$ screw Is loca ted to th e rigft of the Z•ro act j ustmenl pot, and Is l y p l·cally fitted w ith a w i re or wlt e term i nat i ng lu g. Typieally, whe n MP·style unlls are equ_,ped w ith explOS I Of'C.\l'OOf e.n ctosures,th e u n it gro unding s crew 1$ attac:heci lo th e en closur e ground pr l0< to Shipment.To ground tho O I N•Sly l e PTX, the use ot sh l e tded twiStOd•pait w i Mg, QtOUncle<f as ne a r a s poss i ble 10 the u n it Ilse.It l s recomm en ded.Physical Mounting of the PTXF I QUte 3 shOws the mount i ng d l me n sJo n s k>r the H P·&tyle PTX, and th e O I N•51y l e PTX hous i ng d i l'l'IOnslOns are ShOw n i n t igure 4Tht M P musltatiOn shc>w'S ttwt u anoe mouni hat<fwa re option.Whe n us i n g 1he H P PTX wilh e x p l o.s i O(l)roof eocto-sures,spring t;t l p$ ex1end from the uni fronlpa n el Reier 10 t he approp r1ale Moore l ndU$l t\es Cata)Og d a1asheet ro r enctosure d i me n s i ons.Installation in Hazardous LocationsThis section contains important information regarding the installation of the PTX in Hazardous Area Locations.Specific Conditions of UseCSA InstallationsInstallation of the Model PTX into a Class 1 Division 1 location requires the use of a CSA Certified Intrinsic Safety Barrier with the following output parameters.Uz = 27V, Imax out = 100mA, Wmax out =0.68W or Uz = 28V, Imax out = 93mA, Wmax out = 0.67W.4-4.S.mn:11 �(1,75 h] -.U,7f811"141e;e1,1.rn�tl'!m--------[�.87in)-----lll"iI Cle ll!'l rl',,.. _____ (4,251f\J _____ _-:\'' ,, '',,II'' ''. ,,l:-: =�p1J KPIX{_�3,W :R E POT 0-1000ID 0-,0,0000 114 ,PS B PTX C -PS �12-42.\!DC POWER SOURCE -.. DLIRREJff DRi\10\1 --SEB NOTE!DEYVlCE NOTE; Som e as a� rBqlite dilfilll!nt Wlhlil!i r ana • a �r � ••�,I!� cw aiodl l ilt:1;1,y bf lnformalio� Maintenance & TroubleshootingOnce pmpcdy 1nsta11ee1 an.1 oonneded, IJ'to PTX i u nc Uons: u n :ane n de<I , A 'Simp e , perloo!C c:heok or @Meclbns. � a ll th.at Is re-q u l fed •o rna ln 1a1n u nll ope r a1km. Moore I nd u5:tl1es. 5ug9es.1, a &-im:>mti 9dledu l e fo r mal nte n anc e Checks .t problems. �e ln the �l,ll"il;lon o1 �he u n � In I t � awllc.a'lbn,•Maka SIJilO lhat 1npu1. and o u 1pu1. eoM«tlon.s .aro clean Md Ugh'l.•Ro mo ve · tM unill I m m Hrviee aM iltc.alibra,e,� su,e that bench inSlruments. usedl are pr,ope.l'il!,' c a ll bla t e(I .Vern loop p!Wt'4r IIOvels,tr, afte r re-ca.tbratlan. me PTX rails lo pe-f1o rm u p 1o sp;eciUcatiOM, co nl aci your 10cal Cl.iSlome r Service D-epartroont. Pl'IDne l'IU!fbers o4 o� STAR cen,ats are lls.1ed Inside lhe fr(lnl OOYTilt ol Urli:S mainu l �n.i clk>n !ii lor 1he r,etu m of tne u ,o tho tactory IOr fur1he r lesliflg or ran.m can bOi lound on lh.e back OOv,&t.Wha 1 cal 101 aulsJan::e, ahNays. r e tM mbe r ,o �i:, t taotory with ltte mod.el and !i(l!ilel number' 011no ot r e � unh, and i. po�1e. �ith Uis fob oomber alld tile !PUrc�e, order ni,imbet u ndB r whiCh Ote unit was ordered. Test J�k,. The OIN-�le PTX Is equipped ww, W.'O Leos4 Jacu. Locat� on Lhe f'ronl pan o l , mese Jaci<.s p ro,v ld'e a. convenient lltlsa.M om votifying l oo p ClU ff ie nt when th e uni:C is Installed! aild op rating,. CoooeeJlng a: m l ll �a e r to the [a.ck&, l abelled ·+ l'" and ·-T", when ·til e u n � b powenKI up. �cs a reedino, 111 mTil!ami;,e. ot lhe cu�nt in tno klop, i'O. 1¾. II desired. �s.u r a ttie vOflaga Cll'Op across a 1 o n cto.OS%) r es l 5,1or 00meo1ed 1o 'the �. The o-urnmt In ·t he ilQop �hQujj �,ch that obt;eii\'o dl iln lhe reslst o r , ±0.01%.© 2018 Moore Industries-International, Inc.Specifications and Information subject to change without notice.。
hec-hms 3.5 bare essentials tutorial and example说明
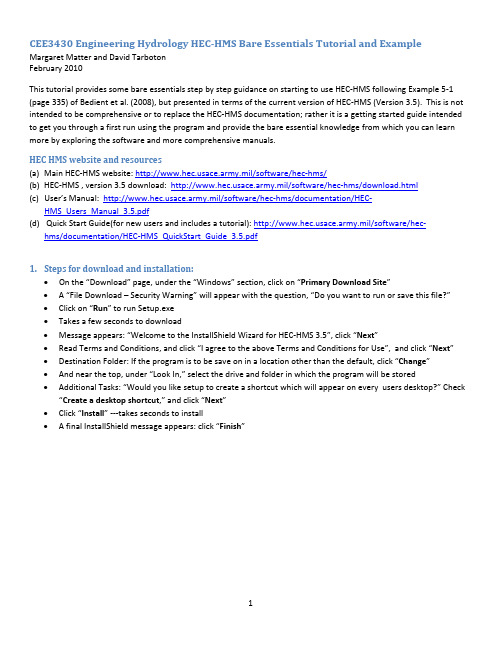
CEE3430 Engineering Hydrology HEC‐HMS Bare Essentials Tutorial and Example Margaret Matter and David TarbotonFebruary 2010This tutorial provides some bare essentials step by step guidance on starting to use HEC‐HMS following Example 5‐1 (page 335) of Bedient et al. (2008), but presented in terms of the current version of HEC‐HMS (Version 3.5). This is not intended to be comprehensive or to replace the HEC‐HMS documentation; rather it is a getting started guide intended to get you through a first run using the program and provide the bare essential knowledge from which you can learn more by exploring the software and more comprehensive manuals.HEC HMS website and resources(a)Main HEC‐HMS website: /software/hec‐hms/(b)HEC‐HMS , version 3.5 download: /software/hec‐hms/download.html(c)User’s Manual: /software/hec‐hms/documentation/HEC‐HMS_Users_Manual_3.5.pdf(d) Quick Start Guide(for new users and includes a tutorial): /software/hec‐hms/documentation/HEC‐HMS_QuickStart_Guide_3.5.pdf1.Steps for download and installation:∙On the “Download” page, under the “Windows” section, click on “Primary Download Site”∙A “File Download – Security Warning” will appear with the question, “Do you want to run or save this file?”∙Click on “Run” to run Setup.exe∙Takes a few seconds to download∙Message appears: “Welcome to the InstallShield Wizard for HEC‐HMS 3.5”, click “Next”∙Read Terms and Conditions, and click “I agree to the above Terms and Conditions for Use”, and click “Next”∙Destination Folder: If the program is to be save on in a location other than the default, click “Change”∙And near the top, under “Look In,” select the drive and folder in which the program will be stored∙Additional Tasks: “Would you like setup to create a shortcut which will appear on every users desktop?” Check “Create a desktop shortcut,” and click “Next”∙Click “Install” ‐‐‐takes seconds to install∙A final InstallShield message appears: click “Finish”2. RThis f curre Steps a. D b. O ∙∙c. T ∙∙∙∙∙Running a s follows Exam ent HEC ‐HMS s:Double click o On the menu For new p For existinThe “New” pr Create a p Select wh Provide a Select the Click“Cre simple case:mple 5.1, the “version (3.5)on the HEC ‐HM bar, click on projects, click ng projects, c roject will be t project name ere the proje description, e units to use ate“Small ‐Waters ).MS 3.5 icon a “File”on “New”lick on “Open the setup in E (I chose “Ex5ect work will b and.shed Example and the progr n ” and select Example 5.15.1”),be stored,e,” from page am screen, si t fromexisting e 335 of Bedie imilar to the p g projects.ent et al. (200picturebelow 08) upgraded w, appearsd for theThe nnew projects creen:d. B∙∙∙∙e. S ∙∙Begin to set u At the top Select “Ba o P o C The folde Close the Set up basin d Double cl labeled “BClick on th creation t Diversion,be input t that theb p the basin p on the men asin Model M rovide a basin lick on “Creatr, “Basin Mod Basin Manag detailsick on (or exp Basin 1” he watershed tools under th , Source, and to the Basin M basin modelw u bar, select Manager” and n name and d te” dels,” appear ger (click X)pand) the fold d icon. This re he menu bar Sink creation Model; and (ii will be set up“Components click on “New descriptions in the Wate der, “Basin M esults in 3 cha (to the right o n tools); (ii) in i) the Basin M with theWat s”w”ershed Explor odels,” and a anges on the s of the magnif n the lower le Model templa tershedCreat rer (on left of small waters screen: (i) it w fying glass: Su eft corner in t ate appears in tion tools.screen) unde shed icon app will make act ubbasin, Reac he Compone n theDesktop er the project pears, as sho ive the water ch, Reservoir,nt Editor, info p area. It is int name, Ex5.1own below,rshed, Junction, ormation may this space1 y∙∙∙Refer to EHMS is flecreate a po AthtoCtho Lotho Aaro AdAt this poshould beto be conarrow poiDownstrethe junctito thereaExample 5.1 foexible on howproject watersdding 3 subbhe pointer cuo place the sulick “Create”he 2 remaininocation of thehe arrow tooldding the 2 jurea and placedd a channelragging) a reaint you havee connected tnected to theinter and righeam”; the curon. Similarlyach. Oncethisor details abow you may preshed and entasins: Click orsor should tuubbasin, andwhen finisheng subbasins.e features ad, left‐clickingunctions: Clice the 2 junctioreach for theach in your bathe necessaro Junction‐1e reach and thht‐clicking onsor turns to c, connect thes is done the“out the waterefer to organier information the Subbasurn to a crossa popup will aed. A subbasided to the waon the objecck on the “Junons on the wae reach fromasin model dey component(at location Ahe reach to juthe upstreamcrosshairs ande other 2 subb“reach”shourshed.ize steps in cron and data.in Creation toshairs for placappear in whn feature appatershed withct and dragginnction Creatioatershed temA to B. Clickesktop area.ts, but they nA) and Subbasunction 2. Com object (e.g.,d connect Subbasins and thld be athickereating a modool. Move thecement of theich a subbasipears on the bh the creationng it to a diffeon tool” and mmplate.on the “Reaceed to be consin‐3 to Junctonnecting the, Subbasin‐1)bbasin‐1 to Jue reach to ther blue lineandel, so the stee cursor overe subbasin. Cn name and dbasin templatn tools may berent locationmove the curch Creation Tonnected. Spetion‐2 (at locae features is d; from the meunction‐1 dowe appropriatend theconneeps below areto the desktolick on the dedescription mte. Repeat thbe changed byn.sor over to thool” and placecifically subbation B). Juncdone by selectenu, select “Cwnstream bye junctions, actionsshoulde one way toop area, andesktop areamay be input.he steps fory selectinghe Desktope (bybasins 1 & 2ction 1 needsting theConnectclicking onnd junctiond be thinner1∙∙∙∙black lineto arrangeInput basTo input icreated inparticularo CLoapo SuarCo Co CSimilarly,Subbasinspecifiedthe TransfInput Unito GoDs as indicatede the layout nin informationformation fon the Desktopr feature appelick on Subbaoss, Transformppear/disappubbasin tab: Trea but may ahange the balick on the loslick on transfenter data fo‐3: Enter the aUnit Hydrogrform tab aret Hydrographo to Componata Type:Scrd. You can mnicelyn to elementor an elemenp area or in thear in the Comasin‐1. Initiallym, Baseflow apear.The “downstralso be entereseflow methoss tab and inporm tab andor Subbasin 2area and setraph for the Tnot active.h for Subbasinnents on the mroll downandove the objecs of the watent of the watehe Watershedmponent Edity, there are 5and Options.ream” point ied or edited hod to none. Cput SCS curveInput TC and.baseflow metTransform Men‐3:main menu atd select “Unitcts around thershed:ershed, click od Explorer. Thtor in the lowtabs in the CDepending os already fillehere. Enter tCheck that the number fromR from pagethod to 0. Setethod. Until tht the top, seleHydrographCe screen andon the elemenhe appropriatwer left cornerComponent Edn the methoded, in since ththe area. Chahe transformam page 335.335.t loss methodhe hydrograpect “Paired DCurves”by clicking ont either in thte informatiorditor (Left‐hads selected thhe connectionange the lossation methodd and CN. Thph informatioataManager,n the labels,he conceptuaon input fieldsand corner): Shese tabs willn was made inmethod to cuis Clark Unitis subbasin hon has been in,”move themal basins for theSubbasin,ln the Desktopurve number.Hydrograph.as a user‐nput, cells ofp.∙∙∙∙o Co In“UwCdNote theat the maSelect Subpattern (eReach‐1:o Ro RhInput Hyeo Ino DAo AoExlick “New” onn the WatershUnit Hydrograwith the nameomponent Edata for Subbadata enteredin menu), anbbasin‐3 in theg, Pattern) toeach tab: Inpouting tab: Mow many subetograph:n Componentata Type: Selnd close.folder, “Timexpand insequn the right—phed Explorer,aph Curves,”e it was givenditor. Set theasin 3 from paare colored bd the data tuhe Watershedo use for Subut informatioMuskingum Kbreaches the rs on the mainect “Precipitae Series Data,uence to“Preprovide namethe folder, “Pand double c(eg, Patterne units and duage 335.blue, indicatirn from blued Manager: Ubasin‐3 in simon from pageand x, and 2reach is splitn menu at theation gage”, c,” is added toecipitationGae and descriptPaired Data”click on the “U1). Click on thuration. Switcng that the dto black, indinder the Tranmulations.335 for Musksubreaches (in to).e top, select “click on “Newo the Watershages,” then“Gtion; then cliwas created;Unit Hydrograhe Unit Hydroch to the “Tabata are not picating that thnsform tab inkingum Routi(2 subreaches“Time Seriesw,” provide nahed ManagerGage 1,”ck “Create”; double clickaph Curves foograph icon toble” tab and epermanent. Sahey are nown the Componings is somewhaData Manageame and desc.to expand toolder to get tho get the Pairenter the Unitave the file (iepermanent.nent Editor, seat arbitrary aner”,cription, andco the folderhe UH iconred Datat Hydrographe, “File, Save”elect the UHnd indicatesclick“Create.””o Uano Fio Tio Tio TathFiino SaUnder Codescriptioo Ao Exo Ino UoUnder “Gage 1nd informatioill in informatime‐Series Gaime Window:able tab: Houhe Time Windig. E5‐1(b) inncrements.ave the file.mponent onon, and click “s before, a foxpand the foln the Componnder Precipitnder “UnitsS1” is a storm eon.tion on the foage tab: Units: define the tiurly time incredow tab. Entethe text. At tthe Main me“Create.”older, “Meteoder out to “Mnent editor, utation, selectSystem,”seleevent with a gollowing tabss = Incrementime window tements shouler hourly preche end of thenu , select “Morologic ModeMet 1”under the Met“Specified Hyct the unitstogeneric date.: Time‐Seriestal inches, anto include timld be on the lcipitation incre precipitationMeteorologicels” is addedteorology Moyetograph”o be used.Click on thes Gage, Timed Time Intervme for the preeft side of threments intern event, inpuModel Manato the Basin‐odel tab,storm eventWindow, andval = 1 Hrecipitation eve table for thrpreted fromt zeroes for tager,” click “N1 schematicito enter hyed Tablevent.he period defithe precipitathe remainingNew;” fill in nin theWaterstograph dataned underation plot ing timeame andshedExplorerr.o B ri is o Fr an oSa asins tab: the ght, under th s distributed u rom “Met 1” nd assign a pr ave theproje e basin mode he column hea uniformly ove in the Water recipitation g ect, since it’sl to be used a ading, “Includ er the basin.shed Explore gage to each s a goodhabit.already be ide de Subbasins,r, double clic subbasin (int entified on th ,” select “Yes k on the raind this case, thehe left side of ,” since it is a drops icon fo same one tothe table, an assumed that or “Specified H the 3subbasnd on theprecipitation Hyetograph”sins).n∙∙∙Model Coo Udtho Exo D19Save the pRunning So Mo Co Bontrol Specificnder Componescription, anhe Watershedxpand the folefine the tim983, 24:00).project.Simulations aMain Menu: Sereate a simul▪1st step▪2nd ste▪3rd ste▪4th steelow the Mai& yellow sun(tcations:nents, selectnd click “Cread Explorer.der out to “Ce window tond Viewing Relect “Compuation run witp: the name,ep: select thep: select a mep: lastly, selein Menu, righthe“compute“Control Spete.” A folder,Control 1,” clicinclude timeesults (an exaute”, then selh a name, whclick “Next”basin model,eteorologicalect a control sht of the compe currentfuncifications M, “Control Speck on it, and ffor the rainfaample of oneect “Create ahich can be de, then click “Nmodel, thenspecificationsponent creati” button).Clianager,” andecifications” ifill in the infoall as well as te method):Simulation Rescribed afteNext”click “Next”s model, andion tools, is ack it to runthclick “New.”is added to thormation in ththe runoff reRun”er it is createdclick “Finish”n button withhesimulationAdd name anhe Basin‐1 schhe Componensponse (I wend; there are 4h a raindrop nn.ndhematic innt Editor areant to 20 Junesteps:next to a red.o Amo ErarViewing Ro Ritmessage boxmessage box.rrors in moderea.Results:ight of the “Rto view asumx appears sayel runs, as weRun Simulatiommary ofsimying that HECll in buildingn” button, ismulationresul‐HMS is finishthe basin moa button tabts.hed computinodel, appear ile with aglobng your simulan the messagbal, the“Globation run; cloge area belowbalSummary”ose thew the Desktop” button.Clickpk∙∙To view gexample,Select theo Oclraphical andthen go to the Run # of whOutput for anyicking onthetabular resulthe Componenich you wanty componente componentts, go to the Wnt Editor areato review thof the basin& selectingthWatershed Exand click one results(eg, Subbasinhe outputforxplorer area athe “Results”n‐2, Reach‐1,rmat type.Moand click on B” tab.Junction‐2) more than 1tyBasin Modelsmay be obserpe may beviefolder, forrved byewed atonce e.Refe Bedieerenceent, P. B., W.C. Huberand d B. E. Vieux,(2008),Hydro ology andFlo o odplainAnaly y sis, 4thEditiion, PrenticeHall, 795 p.。
飞利浦产品说明书
2
3
h
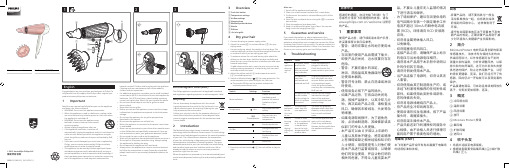
3 Overview
a Cool shot button b Temperature settings c Airflow settings d Hanging loop e Moisture protect button f Nozzle g Diffuser h Air inlet grille
hazards involved. Children shall not play with the appliance. Cleaning and user maintenance shall not be made by children without supervision. • For additional protection, we advise you to install a residual current device (RCD) in the electrical circuit that supplies the bathroom. This RCD must have a rated residual operating current not higher than 30mA. Ask your installer for advice. • Do not insert metal objects into the air grilles to avoid electric shock. • Never block the air grilles. • Before you connect the appliance, ensure that the voltage indicated on the appliance corresponds to the local power voltage. • Do not use the appliance for any other purpose than described in this manual. • Do not use the appliance on artificial hair. • When the appliance is connected to the power, never leave it unattended. • Never use any accessories or parts from other manufacturers or that Philips does not specifically recommend. If you use such accessories or parts, your guarantee becomes invalid. • Do not wind the main cord round the appliance. • Wait until the appliance has cooled down before you store it. • Do not pull on the power cord after using. Always unplug the appliance by holding the plug. • Do not operate the appliance with wet hands. • Always return the appliance to a service centre authorized by Philips for examination or repair. Repair by unqualified people could result in an extremely hazardous situation for the user.
系统设计书
设计背景随着现代科学技术的迅猛发展,计算机技术已经渗透到各个领域,成为各行业必不可少的工具,特别是Internet 技术的推广和信息高速公路的建立,使IT 产业在市场竞争中越发显示出其独特的优势,步入信息化时代,有巨大的数据信息等待加工处理和传输,这使得对数据库的进一步开发和利用显得尤为迫切。
作为国内市场的一些中小型超市,它们在信息化过程中的步伐要落后于大中型超市,而对于这些企业的资源管理,信息的存储和处理也显得迫切需要,要适应市场竞争,就需要有高效的处理方式和管理方法,因此加快超市的信息化进程是必可少的。
在企业中,销售管理是一项非常重要的工作。
使用人工方式管理各项产品销售信息不仅效率低下,而且容易出错,安全性也差。
并且在实际操作中,数据的查找以及客户信息的保管等都不容易实现。
这将导致管理费用的增加,服务质量也难以得到保证,从而影响企业的竞争力。
利用销售管理系统能有效灵活地管理企业或者公司的销售情况,这将为公司或者企业节省不少的费用。
通过对市场的调查,针对现在各中小型超市对经营业务和人事管理的实际需要,开发了这套超市管理系统。
在开发过程中,针对当前各超市管理的特点和个人的实际水平,采用基于Windows 图形用户界面这一易学易用的操作环境,在系统设计过程中,尽量采用易懂易读的人机界面,使用户可以在短期内完全掌握。
又始终把系统的正确性放在首位,力求数据的完整和处理的正确性。
在此基础上优化程序代码,加速系统运行和减少对系统资源的占用。
系统中形形色色的管理子模块和快捷的功能选择,使得进销存管理系统在企业中进行内部管理成为重要组成部分。
它可以实现企业产品信息管理和销售记录及信息检索。
他可以实现客户信息管理。
并且操作简单安全,从而提高工作效率和质量。
本系统基本管理部分对商品、客户和供应商进行统一的管理,包括商品信息的加入和新供应商关系的建立等。
进货部分对购入的物品进行自动编号入库生成可视化的表格处理和对已经采购的物品查询等功能。
RSLogix 5000 电机驱动编程示例说明书

12 RSLogix 5000
12
2
S88
Power Programming
4.2
19 (action)
13
20 4.3
Power Programming
14
Power Programming
21
5
5.1
15 S88 PackML
Power Programming
22
Power Programming
21 PackML
28
8
8.1
Power Programming (general strategy)( )
22
Power Programming
29
9
9.1 EM02_Conveyor
EM02_Conveyor 1
mands
UNITXX_EM_YY_Conditions
XX
YY
0-3
acc cruise dec dwell 4
CAM1 5 CAM2
0-3
acc cruise dec dwell 4
CAM1 5 CAM2
CAM
Error! Reference source not found X status
1
42
41 CM41_DriveToOffset
2
43
Power Programming
5
42 CM41_DriveToOffset
3
43
43
DriveToOffsetDone
44
44
45
45
DriveToOffset
46
46 Cartoner
47
RDC644XG控制系统用户手册说明书

User’s Manual of RDC644XGControl SystemShenzhen Reader Technology Co.,Ltd.RD Co.,Ltd.Shenzhen Reader Technology Co.,LtdCopyright DeclarationShenzhen Reader Technology Co.,Ltd.reserves all rights.Shenzhen Reader Technology Co.,Ltd.(hereinafter referred to as“RD Co.,Ltd.”) holds the patent right,copyright and other intellectual property rights for this product and its related software.Without authorization,no one is allowed to copy, manufacture,process and use this product and its relative parts directly or indirectly.RD Co.,Ltd.is entitled to increase or reduce and modify the shape and functions of this product stated herein as well as amend any documents attached to this product,without prior notification.The users should peruse this Manual prior to using the product stated herein.RD Co.,Ltd. shall not be responsible for the direct,indirect,special,incidental or corresponding losses or damages arising out of improper use hereof or of this product.The machine in operation is dangerous,so the users are obliged to design and institute the effective mechanism for error handling and safety protection.RD Co.,Ltd.shall not undertake any duties or responsibilities for the incidental or corresponding losses arising therefrom.Version HistoryV1.1:The original versionV1.2:1.The sixth pins definition of CN3and CN4is changed;2.The fifth pins definition of CN5and CN5is changed;3.Some explanation of the user parameters is changed;4.Some of the Object Pictures of MainBoard silk-screen is changed;CONTENTS1.OVERVIEW (1)1.1B RIEFING (1)1.2D ESCRIPTION OF C ONTROLLER M ODEL (1)1.3C OMPARISON OF C ONTROLLER P ERFORMANCE (1)2INSTALLATION SIZE (4)2.1I NSTALLATION S IZE OF M AIN B OARD (4)2.2S IZE OF P ANEL (5)3OBJECT PICTURES AND INTERFACES (6)3.1O BJECT P ICTURES OF M AIN B OARD (6)3.2O BJECT P ICTURES OF P ANEL (7)3.3E LECTRIC CONNECTION (8)4DESCRIPTION OF INTERFACE SIGNAL FOR MAINBOARD (9)4.1I NTERFACE OF M AIN P OWER S OURCE CN0 (9)4.2P ANEL S IGNAL-C ABLE I NTERFACE HMI (9)4.3U DISK I NTERFACE (9)4.4PC-USB I NTERFACE (9)4.5E THERNET I NTERFACE (9)4.6G ENERAL O UTPUT P ORT CN1 (10)4.7G ENERAL I NPUT P ORT CN2 (10)4.84-AXLE S PACING I NPUT I NTERFACE CN3/CN4 (11)4.9X/Y/Z/U AXLE M OTOR D RIVER I NTERFACE AXIS_X~AXIS_U (12)4.10L ASER P OWER C ONTROL I NTERFACE CN5/CN6 (12)5EXAMPLES OF LASER POWER INTERFACE (14)5.1B RIEF (14)5.2E XAMPLES OF G LASS TUBE L ASER P OWER (15)5.3E XAMPLES OF RF-L ASER (16)6EXAMPLES OF DRIVER INTERFACE FOR STEP-SERVO MOTOR (17)6.1B RIEF (17)6.2E XAMPLES OF M OTOR D RIVER C ONNECTION (18)7EXAMPLES OF IO-PORT WIRING (19)7.1I NPUT (19)7.2O UTPUT (20)8OPERATING INSTRUCTION OF PANEL (21)8.1I NTRODUCTION TO THE P ANEL AND K EYS (21)8.1.1The whole panel (21)8.1.2Introduction to the Keys (21)8.2I NTRODUCTION TO THE M AIN I NTERFACE (23)8.2.1The main interface (23)8.2.2Speed key (24)8.2.3Max/Min power keys (24)8.2.4Set the layer parameters (25)8.3Z/U K EY (26)8.3.1Z move (26)8.3.2U move (26)8.3.3Axis reset+ (26)8.3.4Manual set+ (27)8.3.5Laser set+ (28)8.3.6Origin set+ (28)8.3.7Set Fact Para (29)8.3.8Def Fact Para (30)8.3.9Auto Focus (30)8.3.10Language (30)8.3.11IP Setup (31)8.3.12Diagnoses (31)8.3.13Screen Origin (32)8.4F ILE K EY (33)8.4.1Memory File (33)8.4.2U Disk File (34)8.5I NTRODUCTION TO SOME ALARM INFO (35)9MANUFACTURER/USER PARAMETERS EXPLANATION (37)9.1M ANUFACTURER PARAMETERS (37)9.2U SER PARAMETERS (40)1.Overview1.1BriefingRDC644XG system is a new generation system for control of laser engraving and cutting,which is developed by RD Co.,Ltd.In addition to high hardware stability,high voltage or static electricity rejection,and friendly3.5’’TFT man-machine display.This system is provided with stronger software function including perfect4-axle motion control function,large-capacity file storage,two-channel adjustable digits laser power control interface,USB driver of stronger compatibility,multi-channel general/special IO control, and,this system can communicate with PC by USB2.0or Ethernet,and the communication mode is automatically checked by the system.1.2Description of Controller Model1.3Comparison of Controller PerformanceRDLC420RDC6332G RDC6342G RDC644XGPower Feature One-way5V,one-way24V,independentOnly one-way24V(compatible with36Vfor power supply,butnot recommended)Only one-way24V(compatible with36Vfor power supply,butnot recommended)Only one-way24V(compatible with36V forpower supply,but notrecommended)Laser Port Feature One-way digitand one-wayanalogTwo-way digits andtwo-way analog port,settableindependently andnon-interactedTwo-way digits andtwo-way analog port,settableindependently andnon-interactedTwo-way digits port,settable independentlyand non-interactedUSB Copying Common Quick Quick Very QuickFeature SpeedCompatibility Support USBdisks withsmall capacity Support all USBdisks with differentcapacitiesSupport all USBdisks with differentcapacitiesSupport all USB diskswith different capacitiesMemory Feature Capacity64M256M256M128MFaultToleranceCommon Capable of checkingdefective track andformatting and goodin fault toleranceCapable of checkingdefective track andformatting and goodin fault toleranceCapable of checkingdefective track andformatting and good infault toleranceGeneral IO Feature Input Port Two ways4ways(two forgeneral,two forspecialties)4ways(two forgeneral,two forspecialties)4ways(two for general,two for specialties) Output Port1-way(lowcurrent,soadditional driveis needed)4-ways(500mA highcurrent for each,OCoutput,no reversecurrent protection)4-ways(500mA highcurrent for each,OCoutput,no reversecurrent protection)4-ways(500mA highcurrent for each,OCoutput,reverse currentprotection included)Software Feature Power-offrestart forEngravingYES YES YES YESMulti-originLogicsNO YES YES YESParameterBackupLogicsNO YES YES YESWork timePreviewNO YES(the work timeaccurate to1ms)YES(the work timeaccurate to1ms)YES(the work timeaccurate to1ms) Online UpdateMainboardProgramNO YES YES YESDisplay Feature OnlineModificationLaserPower/SpeedYES YES YES YESOfflineModificationLayerparametersNO YES YES YESOnline UpdateStartupDisplayNO YES YES NOFiledynamic/staticpreviewNO YES YES YESRun progressbar displayNO NO NO YESModificationFactory/User’spara ondisplayNO YES YES NODisplay type128*64,dotdisplay320*240TFT display320*240TFT display320*480TFT display Soft Spacing YES YES YES YESMotion-axl e Feature Hard Spacing NO YES YES YESZ-axleLinkageNO YES YES YESFeedingFeatureSingledirectionSingle/doubledirection for optionSingle/doubledirection for optionSingle/double directionfor optionPower-onResettingFixed Configurable foreach axesConfigurable for eachaxesConfigurable for eachaxesKey Speed Fixed Configurable Configurable ConfigurableAxles43(Z axes isconfigurable to flat orfeedin axes)3(Z axes isconfigurable to flat orfeedin axes)4Encryption Feature Encryptionbased on thePC timeRealtime clock andbattery integrated forhardware encryptionRealtime clock andbattery integrated forhardware encryptionNo realtime clock,butencryption includedCommunic ateMode USB2.010/100MHZ Ethernetor USB2.010/100MHZ Ethernetor USB2.010/100MHZ Ethernet orUSB2.0,communicationmode is automaticallychecked2Installation Size2.1Installation Size of MainBoardThe unit of all sizes is millimeter(mm)and the size accurate to0.1mm(the four holes are symmetrical)Figure2.1-12.2Size of PanelThe unit of all sizes is millimeter(mm)and the size accurate to0.1mm.Figure2.2-13Object Pictures and Interfaces3.1Object Pictures of MainBoardFor more detailed pin description,see the Chapter4:Description of Interface Signal for MainBoard.Figure:3.1-1Object Picture of MainBoard3.2Object Pictures of PanelFigure:3.2-1Object Picture of Panel3.3Electric connectionFigure3.3-1electric connection4Description of Interface Signal for MainBoard4.1Interface of Main Power Source CN0This control system employs single 24power supply.For a certainmargin,it is suggested to select 24V/2A power.Besides,this system iscompatible with 36V power,that is to say,the 36V power of Motiondriver can directly be connected to this main power port of this system,but generally it is not suggested to do so.4.2Panel Signal-Cable Interface HMIThe panel signal-cable is a pin-to-pin cable,which is included in the factory shipper bill.4.3Udisk InterfaceUdisk is a USB-AM interface.The controller may visit the u-disk by this interface.4.4PC-USB InterfacePC-USB is a USB-BM interface.The controller may communicate with PC by this port.4.5Ethernet InterfaceUsing this interface,the mainboard can communicate with PC by 10/100MHZ Ethernet.Pin Symbols Definitions1GND 24V power ground (input)2+24V24V power positive (input)CautionPin to Pin Ethernet parallel line is recommended.4.6General Output Port CN1Definition of general output portPin Symbols Definitions1GND Power ground (output)2Out2General output,with the function reserved.3Out1General output,with the function reserved.4Status General output for the signal port of running status.If this port isexternally connected with the relay,the relay coil is broken overwhen it works;no influence is produced when it suspends working.When its work ends or is stopped manually,the relay coil will becut off.5Wind General output for blower control.When the blower control isenabled,this port will output the control signal of the blower,otherwise it will output other special control signals.When theblower is connected and its control enabled,the blower switch canbe set separately on each layer.If the relay is connectedexternally,the relay coil will be broken over when the blower is on;the relay coil will be cut off when the blower is off.6+24V24V Power positive output (If the interface of main power source ispowered with 24V power supply,this pin should be 24V;if it ispowered with 36V power supply,this pin should be 36V.)All outputs are isolated through the optocoupler,and 500mA current for each,OC gate output,each can directly drive the 6V/24V relay.4.7General Input Port CN2Pin Symbols Definitions1GND Power ground (output)2FootSWInput port of foot switch.The connection method is:when thepedal is stepped down,the low-level signal will be inputted tothis port;when the pedal is released,the port will bedisconnected or the high-level signal can be inputted to thisport;when the stepped-down pedal is held for not less than100ms,if the machine lies idle,it can be started for work;ifthe machine is in the working state,the work will besuspended;of the machine is in the suspension,the work willCautionPromptbe restarted,that is to say,the function of the pedal switch isthe same as that of the“Start/Pause”key.If the interval time tothe first stepping-down of the pedal should be less than100ms when the pedal is stepped down once again,thesecond stepping-down of the pedal will be considered invalidby the mainboard.3DrProc Input from protective port.If the machine needs to beprotected in the special state(such as door open protection),the protective signal can be inputted from this pin.This pin canbe enabled and prohibited.This signal is not inquired by themainboard if this pin is prohibited;if this pin is enabled,whenthe input is high-leveled or this input port is suspended,themachine will be protected,the work suspended and the laserclosed.4Shot Input for manual laser on/off.Low level is to open laserand high level or no-connection is to close laser.5IN1General Input,with the function reserved.6+24V24V Power positive output(If the interface of main powersource is powered with24V power supply,this pin should be24V;if it is powered with36V power supply,this pin should be36V.)4.84-axle Spacing Input Interface CN3/CN4X/Y axle spacing input CN4Pin Symbols Definitions1GND Power ground(output)2LmtY-The spacing from axle Y-and Y to0coordinate3LmtY+The spacing from axle Y+and Y to max.coordinate4LmtX-The spacing from axle X-and X to0coordinate5LmtX+The spacing from axle X+and X to max.coordinate6Puxy5V Power positive(output)The spacing polarity is optional,that is to say,when the motion axle reaches the spacing position,it will trigger a low-level signal so as to make the corresponding LED (under the cover)light;when the motion axle leaves the spacing position,it will trigger a high-level signal or disconnect the spacing signal so as to make the spacing indicator go out,but when it leaves the spacing,the corresponding indicator will light and the spacing polarity become positive.The mistaken setting of spacing polarity will result that the spacing can’t be detected when the system is reset so as to lead to the collision of axles.The pin definitions of Z/U axle spacing input CN3are the same as CN4.All XYZU axle spacing inputs are compatible to5V/12V/24V logic level inputs。
BPBIO750 使用手册说明书

Blood Pressure Guidelines (Age18andOver) * Please consult with your doctor for accurate diagnosis.
Diastolic Blood Pressure
Stage 2 Hypertension Stage 1 Hypertension Prehypertension
2021-05-21 오전 10:41:14
SYS.
DIA.
Place your elbow on the elbow point. Press the START button. Do not move during the measurement.
P.R
SYS.
DIA.
Blood Pressure Guidelines (Age18andOver) Place your elbow on the elbow point. *PPrleeassescotnhseultSwTithAyRouTr urate diagnosis.
IV. 常见问题解答
A. Error Code
25
A. 错误代码
56
B. Regarding the Equipment
25
B. 关于设备
56
C. Regarding the Test
27
C. 关于血压测量
58
V. Others
V. 其他
A. Exterior and Functions
29
A. 外观及功能
P.R
SYS.
DIA.
Place your elbow on the elbow point. Press the START button. Do not move during the measurement.
FAUNC 网卡协议

cnc_rdnodenum Read the number of nodecnc_rdnodeinfo Read the information of nodecnc_setdefnode Set the default node numbercnc_allclibhndl Allocate library handlecnc_allclibhndl2 Allocate the library handle(for multi-connection)cnc_allclibhndl3 Get the library handlecnc_freelibhndl Free library handlecnc_settimeout Set timeout intervalcnc_getlibopt Get a library optioncnc_setlibopt Set a library optionCNC: Function related to controlled axis/spindlecnc_actf Read actual axis feedrate(F)cnc_absolute Read absolute axis positioncnc_absolute2 Read absolute axis position 2cnc_machine Read machine axis positioncnc_relative Read relative axis positioncnc_relative2 Read relative axis position 2cnc_distance Read distance to gocnc_rdposition Read position informationcnc_rdaxisdata Read various data relating servo axis or spindle axis cnc_skip Read skip positioncnc_srvdelay Read servo delay valuecnc_accdecdly Read acceleration/deceleration delay valuecnc_rddynamic Read all dynamic datacnc_rddynamic2 Read all dynamic data (2)cnc_acts Read actual spindle speed(S)cnc_acts2 Read actual spindle speed(S) (2)cnc_rdspcss Read constant surface speed datacnc_rdspeed Read speed informationcnc_wrrelpos Set origin/preset relative axis positioncnc_prstwkcd Preset work coordinatecnc_rdmovrlap Read manual overlapped motion valuecnc_canmovrlap Cancel manual overlapped motion valuecnc_rdhndintrpt Read manual overlapped motion informationcnc_rdspload Read load information of serial spindlecnc_rdspmaxrpm Read maximum r.p.m. ratio of serial spindlecnc_rdspgear Read gear ratio of serial spindlecnc_rdsvmeter Read servo load metercnc_rdspmeter Read spindle load metercnc_rd3dtooltip Read tool tip coordinates for 3-dimensional handle feedcnc_rd3dpulse Read handle interrupt pulse amount for 3-dimensional handle feedcnc_rd3dmovrlap Read handle interrupt move amount for 3-dimensional handle feedcnc_rd3dofschg Read the modification of tool length compensation amount in tool axis dir.for3-dimensional handle feedcnc_clr3dplsmov Clear handle interrupt pulse and move amount for 3-dimensional handle feedcnc_rdaxisname Read axis namecnc_exaxisname Read the name of controlled axis and spindle namecnc_exaxisname2 Read the name of controlled axis and spindle name(2)cnc_rdspdlname Read spindle namecnc_rd5axmandt Read the data for the manual feed for 5-axis machiningcnc_rd5axovrlap Read the machine axis movement for the manual feed for 5-axis machiningcnc_clr5axpls Clear the pulse amount for manual feed for 5-axis machiningCNC: Function related to CNC programcnc_dwnstart Start downloading NC programcnc_download Download NC programcnc_cdownload Download NC program(conditional)cnc_dwnend End of downloading NC programcnc_dwnstart3 Start downloading NC program (3)cnc_download3 Download NC program (3)cnc_dwnend3 End of downloading NC program (3)cnc_dwnstart4 Start downloading NC program (4)cnc_download4 Download NC program (4)cnc_dwnend4 End of downloading NC program (4)cnc_vrfstart Start verification of NC programcnc_verify Verify NC programcnc_cverify Verify NC program(conditional)cnc_vrfend End of verificationcnc_vrfstart4 Start verification of NC program(4)cnc_verify4 Verify NC program(4)cnc_vrfend4 End of verification(4)cnc_buff Read buffer status for downloading/verification NC programcnc_dncstart Start downloading DNC programcnc_dnc Download DNC programcnc_cdnc Download DNC program(conditional)cnc_dncend End of downloading DNC programcnc_dncstart2 Start downloading DNC program (2)cnc_dnc2 Download DNC program (2)cnc_dncend2 End of downloading DNC program (2)cnc_rddncdgndt Read the diagnosis data of downloading DNC programcnc_upstart Start uploading NC programcnc_upload Upload NC programcnc_cupload Upload NC program(conditional)cnc_upend End of uploading NC programcnc_upstart3 Start uploading NC program (3)cnc_upload3 Upload NC program (3)cnc_upend3 End of uploading NC program (3)cnc_upstart4 Start uploading NC program (4)cnc_upload4 Upload NC program (4)cnc_upend4 End of uploading NC program (4)cnc_search Search specified programcnc_delall Delete all programscnc_delete Delete specified programcnc_delrange Delete specified program(area specified)cnc_rdprogdir Read program directorycnc_rdprogdir2 Read program directory (2)cnc_rdprogdir3 Read program directory (3)cnc_rdprogdir4 Read program directory (4)cnc_rdproginfo Read program informationcnc_rdprgnum Read program number under executioncnc_exeprgname Read program name under executioncnc_exeprgname2 Read program name under execution (2)cnc_rdseqnum Read sequence number under executioncnc_seqsrch Search specified sequence numbercnc_seqsrch2 Search specified sequence number(2)cnc_rewind Rewind cursor of NC programcnc_rdblkcount Read block countercnc_rdexecprog Read program under executioncnc_wrmdiprog Write program for MDI operationcnc_rdmdipntr Read execution pointer for MDI operationcnc_wrmdipntr Write execution pointer for MDI operationcnc_rdmdiprgstat Get MDI program informationcnc_rdproctime Read processing time stamp datacnc_rdprgdirtime Read directory for processing time stamp data cnc_copyprog Copy programcnc_mergeprog Merge programcnc_renameprog Change program numbercnc_condense Condense programcnc_rdprogline Read NC program by line basiscnc_rdprogline2 Read NC program by line basis(2)cnc_wrprogline Write NC program by line basiscnc_delprogline Delete NC program by line basiscnc_searchword Search string in NC programcnc_searchresult Get result of string search in NC programcnc_setpglock Set the protection of running/editing of NC programcnc_resetpglock Reset the protection of running/editing of NC programcnc_rdpglockstat Get the status of running/editing of NC programcnc_rdactpt Get execution pointercnc_wractpt Set execution pointercnc_rdexecpt Read execution pointercnc_rdpdf_drive Read information of Program memory drivecnc_rdpdf_inf Read information Program memory filecnc_rdpdf_curdir Read information of current foldercnc_wrpdf_curdir Set current foldercnc_rdpdf_subdir Read information of subfoldercnc_rdpdf_alldir Read file informationcnc_rdpdf_subdirn Read number of subfolders or filescnc_pdf_add Create folder or filecnc_pdf_del Delete folder or filecnc_pdf_delall Delete all programscnc_pdf_rename Rename folder or filecnc_pdf_copy Copy filecnc_pdf_move Move filecnc_pdf_cond Rearrange the contents of the programcnc_wrpdf_attr Change attribute of folder or filecnc_pdf_rdmain Read main programcnc_pdf_slctmain Select main programcnc_rdpdf_line Read NC program by line basis(For arbitrary file name)cnc_wrpdf_line Write NC program by line basis(For arbitrary file name)cnc_pdf_delline Delete NC program by line basis(For arbitrary file name)cnc_pdf_searchword Search string in NC program(For arbitrary file name)cnc_pdf_searchresult Get result of string search in NC program(For arbitrary file name) cnc_pdf_rdactpt Get execution pointer(For arbitrary file name)cnc_pdf_wractpt Set execution pointer(For arbitrary file name)cnc_saveprog_start Starts of the manual saving for the high speed program management cnc_saveprog_end Get execution result of the manual saving for the high speed program managementCNC: Function related to CNC file datacnc_rdtofs Read tool offset valuecnc_wrtofs Write tool offset valuecnc_rdtofsr Read tool offset value(area specified)cnc_wrtofsr Write tool offset value(area specified)cnc_rdtofsinfo Read tool offset informationcnc_rdtofsinfo2 Read tool offset information (2)cnc_tofs_rnge Read the effective setting range of tool offset valuecnc_rdzofs Read work zero offset valuecnc_wrzofs Write work zero offset valuecnc_rdzofsr Read work zero offset value(area specified)cnc_wrzofsr Write work zero offset value(area specified)cnc_rdzofsinfo Read work zero offset informationcnc_zofs_rnge Read the effective setting range of work zero offset value cnc_rdparam Read parametercnc_wrparam Write parametercnc_rdparam3 Read parameter(3)cnc_rdparar Read parameter(area specified)cnc_wrparas Write parameter(area specified)cnc_rdparam_ext Read random number parameterscnc_rdhsprminfo Get information for high-speed read of parametercnc_rdhsparam High-speed read of parametercnc_rdparainfo Read parameter informationcnc_rdparainfo3 Read parameter information (3)cnc_rdparanum Read minimum, maximum, total number of parametercnc_rdset Read setting datacnc_wrset Write setting datacnc_rdsetr Read setting data(area specified)cnc_wrsets Write setting data(area specified)cnc_rdsetinfo Read setting data informationcnc_rdsetnum Read minimum, maximum, total number of setting datacnc_rdpitchr Read pitch error compensation data(area specified)cnc_wrpitchr Write pitch error compensation data(area specified)cnc_rdpitchinfo Read pitch error compensation data informationcnc_rdvolc Read 3-dimensional error compensation datacnc_wrvolc Write 3-dimensional error compensation datacnc_rdvolccomp Read 3-dimensional error compensation value at current positioncnc_rdrotvolc Read the 3-dimensional rotary error compensation datacnc_wrrotvolc Write the 3-dimensional rotary error compensation datacnc_rdmacro Read custom macro variablecnc_wrmacro Write custom macro variablecnc_rdmacror Read custom macro variables(area specified)cnc_wrmacror Write custom macro variables(area specified)cnc_rdmacror2 Read custom macro variables(double precision)cnc_rdmacror3 Read custom macro variables and name(area specified)cnc_wrmacror2 Write custom macro variables(double precision)cnc_rdmacroinfo Read custom macro variable informationcnc_getmactype Get type of custom macro variablecnc_setmactype Set type of custom macro variablecnc_rdpmacro Read P code macro variablecnc_wrpmacro Write P code macro variablecnc_rdpmacror Read P code macro variables(area specified)cnc_rdpmacror2 Read P code macro variables(double precision)cnc_wrpmacror Write P code macro variables(area specified)cnc_wrpmacror2 Write P code macro variables(double precision)cnc_rdpmacroinfo Read P code macro variable informationcnc_rdpmacroinfo2 Read P code macro variable information(2)cnc_getpmactype Get type of P code macro variablecnc_setpmactype Set type of P code macro variablecnc_rdmgrpdata Read M code group datacnc_wrmgrpdata Write M code group datacnc_rdexecmcode Read M code group data(executing,executed M code)cnc_rdrstrmcode Read M code group data(for program restart)cnc_rdhpccset Read setting data for High-speed and high-precision machining cnc_wrhpccset Write setting data for HPCCcnc_hpccatset Set setting data for HPCC automaticallycnc_rdhpcctupr Read tuning data(parameter input) for HPCCcnc_wrhpcctupr Write tuning data(parameter input) for HPCCcnc_rdhpcctuac Read tuning data(acc./dec. input) for HPCCcnc_wrhpcctuac Write tuning data(acc./dec. input) for HPCCcnc_hpccattune Tune up tuning data for HPCC automaticallycnc_hpccactfine Read fine level for HPCCcnc_hpccselfine Select fine level for HPCCcnc_rdactfixofs Read active fixture offsetcnc_rdfixofs Read fixture offset value(area specified)cnc_wrfixofs Write fixture offset value(area specified)cnc_rdintchk Read interference check data(area specified)cnc_wrintchk Write interference check data(area specified)cnc_rdintinfo Read interference check data informationcnc_rdwkcdshft Read work coordinate shift valuecnc_wrwkcdshft Write work coordinate shift valuecnc_rdwkcdsfms Read work coordinate shift measured valuecnc_wrwkcdsfms Write work coordinate shift measured valuecnc_wksft_rnge Read the effective setting range of work coordinate shift valuecnc_rdbtofsr Read tool offset value for B axis(area specified)cnc_wrbtofsr Write tool offset value for B axis(area specified)cnc_rdbtofsinfo Read tool offset information for B axisCNC: Function related to tool life management datacnc_rdgrpid Read tool life management data(tool group number)cnc_rdgrpid2 Read tool life management data(tool group number) 2cnc_rdngrp Read tool life management data(number of tool groups)cnc_rdntool Read tool life management data(number of tools)cnc_rdlife Read tool life management data(tool life)cnc_rdcount Read tool life management data(tool life counter)cnc_rd1length Read tool life management data(tool length number-1)cnc_rd2length Read tool life management data(tool length number-2)cnc_rd1radius Read tool life management data(cutter compensation num.-1)cnc_rd2radius Read tool life management data(cutter compensation num.-2)cnc_t1info Read tool life management data(tool information-1)cnc_t2info Read tool life management data(tool information-2)cnc_toolnum Read tool life management data(tool number)cnc_rdtoolrng Read tool life management data(tool number,tool life,tool life counter)(area specified)cnc_rdtoolgrp Read tool life management data(all data within group)cnc_wrcountr Write tool life management data(tool life counter)(area specified)cnc_rdusegrpid Read tool life management data(used tool group number)cnc_rdmaxgrp Read tool life management data(max. number of tool groups)cnc_rdmaxtool Read tool life management data(max. number of tool within group)cnc_rdusetlno Read tool life management data(used tool number within group)cnc_rd1tlifedata Read tool life management data(tool data1)cnc_rd1tlifedat2 Read tool life management data(tool data1) 2cnc_rd2tlifedata Read tool life management data(tool data2)cnc_wr1tlifedata Write tool life management data(tool data1)cnc_wr1tlifedat2 Write tool life management data(tool data1) 2cnc_wr2tlifedata Write tool life management data(tool data2)cnc_rdgrpinfo Read tool life management data(tool group information)cnc_rdgrpinfo2 Read tool life management data(tool group information 2)cnc_rdgrpinfo3 Read tool life management data(tool group information 3)cnc_rdgrpinfo4 Read tool life management data(tool group information 4)cnc_wrgrpinfo Write tool life management data(tool group information)cnc_wrgrpinfo2 Write tool life management data(tool group information 2)cnc_wrgrpinfo3 Write tool life management data(tool group information 3)cnc_deltlifegrp Delete tool life management data(tool group)cnc_instlifedt Insert tool life management data(tool data)cnc_deltlifedt Delete tool life management data(tool data)cnc_clrcntinfo Clear tool life management data(tool life counter,tool information)(area specified)cnc_rdtlinfo Read tool life management data(maximum number of tool groups, maximum number oftool within group, maximum number of life count)cnc_rdtlusegrp Read tool life management data(next/current/last used tool group number)cnc_rdtlgrp Read tool life management data(tool group information) (area specified)cnc_rdtltool Read tool life management data(tool data) (area specified)cnc_rdexchgtgrp Read tool life management data(Exchange necessary tool group number)CNC: Function related to tool management datacnc_regtool New registration of Tool management datacnc_regtool_f2 New registration of Tool management data (2)cnc_deltool Delete Tool management datacnc_rdtool Read Tool management datacnc_rdtool_f2 Read Tool management data (2)cnc_wrtool Write Tool management datacnc_wrtool_f2 Write Tool management data (2)cnc_wrtool2 Write individual data of Tool management datacnc_regmagazine New registration of Magazine management datacnc_delmagazine Delete Magazine management datacnc_rdmagazine Read Magazine management datacnc_wrmagazine Write individual data of Magazine management datacnc_wrtoolgeom_tlm Write tool geometry datacnc_rdtoolgeom_tlm Read tool geometry datacnc_btlfpotsrh Search empty pot for oversize toolcnc_rdmag_property Read the magazine property datacnc_wrmag_property Write the magazine property datacnc_delmag_property Delete the magazine property datacnc_rdpot_property Read the pot property datacnc_wrpot_property Write the pot property datacnc_delpot_property Delete the pot property datacnc_tool_move Move of tool management datacnc_reg_toolstrage Registration and release of Tool storage positionCNC: Function related to tool geometry size datacnc_rdtlgeomsize_ext Read the tool geometry size datacnc_wrtlgeomsize_ext Write the tool geometry size dataCNC: Function related to history datacnc_stopophis Stop logging operation history datacnc_startophis Restart logging operation history datacnc_rdophisno Read number of operation history datacnc_rdophistry Read operation history datacnc_rdophistry2 Read operation history data (2)cnc_rdophistry4 Read operation history data (4)cnc_clearophis Clear operation history datacnc_rdhissgnl Read signals related operation historycnc_wrhissgnl Write signals related operation historycnc_rdhissgnl2 Read signals related operation history(2)cnc_wrhissgnl2 Write signals related operation history(2)cnc_rdhissgnl3 Read signals related operation history(3)cnc_wrhissgnl3 Write signals related operation history(3)cnc_wrkeyhistry Record of key strokecnc_rdalmhisno Read number of alarm history datacnc_rdalmhistry Read alarm history datacnc_rdalmhistry2 Read alarm history data (2)cnc_rdalmhistry5 Read alarm history data (5)cnc_stopomhis Stop logging external operator's message history datacnc_startomhis Restart logging external operator's message history datacnc_rdomhisinfo Read external operator's message history datainformationcnc_rdomhisno Read number of external operator's message history datacnc_rdomhistry Read external operator's message history datacnc_rdomhistry2 Read external operator's message history data (2)cnc_clearomhis Clear external operator's message history dataCNC: Function related to servo/spindlecnc_rdloopgain Read loop gain for servo adjustmentFunction Referencefile:///C|/Users/heyang/Desktop/FOCAS_Api_Help/Document/flist_com.htm[2018/1/2 16:51:50]cnc_rdcurrent Read real current for servo adjustmentcnc_rdsrvspeed Read real speed for servo adjustmentcnc_rdnspdl Read number of spindlecnc_rdopmode Read operation mode for spindle settingcnc_rdposerrs Read position deflection S for spindle adjustmentcnc_rdposerrs2 Read position deflection S1,S2 for spindle adjustment(synchronous control mode) cnc_rdposerrz Read position deflection Z of tapping axis for spindle adjustment(rigid tapping mode)cnc_rdsynerrsy Read synchronous error for spindle adjustment(synchronous control mode)cnc_rdsynerrrg Read synchronous error for spindle adjustment(rigid tapping mode)cnc_rdspdlalm Read spindle alarm for spindle monitorcnc_rdctrldi Read control input signal for spindle monitorcnc_rdctrldo Read control output signal for spindle monitorcnc_loadtorq Read abnormal load torq datacnc_sdtsetchnl Setting of channel data.cnc_sdtclrchnl Clear of channel data.cnc_sdtstartsmpl Start of Sampling.cnc_sdtcancelsmpl Cancel of samplingcnc_sdtreadsmpl Read of sampling datacnc_sdtendsmpl End of samplingcnc_sdtread1shot 1 shot read of sampling dataCNC: Function related to waveform diagnosisFunction Name Brief descriptioncnc_rdwaveprm Read waveform diagnosis parametercnc_rdwaveprm2 Read waveform diagnosis parameter (2)cnc_wrwaveprm Write waveform diagnosis parametercnc_wrwaveprm2 Write waveform diagnosis parameter (2)cnc_wavestart Start sampling waveform diagnosis datacnc_wavestop Stop sampling waveform diagnosis datacnc_wavestat Read sampling status of waveform diagnosis datacnc_rdwavedata Read waveform diagnosis dataCNC: Function related to PUNCH PRESSFunction Name Brief descriptioncnc_rdtlctldata Read tool control datacnc_wrtlctldata Write tool control dataFunction Referencefile:///C|/Users/heyang/Desktop/FOCAS_Api_Help/Document/flist_com.htm[2018/1/2 16:51:50] cnc_rdtoolinfo Read tool information datacnc_rdtooldata Read tool datacnc_wrtooldata Write tool datacnc_rdmultitldt Read multiple tool datacnc_wrmultitldt Write multiple tool datacnc_rdsafetyzone Read safety zone datacnc_wrsafetyzone Write safety zone datacnc_rdtoolzone Read tool zone datacnc_wrtoolzone Write tool zone datacnc_rdacttlzone Read actual tool zone datacnc_rdsetzone Read number of automatic setting zonecnc_wrsetzone Write number of automatic setting zonecnc_rd1punchtl_ex Get tool data(Registration number specification)cnc_rd2punchtl_ex Get tool data(Tool number specification)cnc_wrpunchtl_ex Get tool data(Registration number specification)CNC: Function related to LASERFunction Name Brief descriptioncnc_rdpscdproc Read cutting condition file(cutting data)cnc_wrpscdproc Write cutting condition file(cutting data)cnc_rdpscdpirc Read cutting condition file(piercing data)cnc_wrpscdpirc Write cutting condition file(piercing data)cnc_rdpscdedge Read cutting condition file(edge cutting data)cnc_wrpscdedge Write cutting condition file(edge cutting data)cnc_rdpscdslop Read cutting condition file(slope control data)cnc_wrpscdslop Write cutting condition file(slope control data)cnc_rdlpwrdty Read duty data for power controlcnc_wrlpwrdty Write duty data for power controlcnc_rdlpwrdat Read laser power datacnc_rdlpwrcpst Read power compensation coefficientcnc_wrlpwrcpst Write power compensation coefficientcnc_rdlagslt Read assist gas selectioncnc_wrlagslt Write assist gas selectioncnc_rdlagst Read assist gas flowcnc_wrlagst Write assist gas flowcnc_rdledgprc Read laser power for contouringFunction Referencefile:///C|/Users/heyang/Desktop/FOCAS_Api_Help/Document/flist_com.htm[2018/1/2 16:51:50] cnc_wrledgprc Write laser power for contouringcnc_rdlprcprc Read laser power for piercingcnc_wrlprcprc Write laser power for piercingcnc_rdlcmddat Read command data of lasercnc_rdldsplc Read command data of reference displacecnc_wrldsplc Write command data of reference displacecnc_rdlerrz Read error of Z-axis tracingcnc_rdlactnum Read active cutting number/piercing number/slope numbercnc_rdlcmmt Read comment datacnc_rdlpwrslt Read laser power selectioncnc_wrlpwrslt Write laser power selectioncnc_rdlpwrctrl Read laser power controlcnc_wrlpwrctrl Write laser power controlcnc_rdpwofsthis Read the history data of power compensation coefficientcnc_rdmngtime Read the management timecnc_wrmngtime Write the management timecnc_rddischarge Read data related to electrical discharge at power compensation endscnc_rddischrgalm Read alarm history data related to electrical dischargecnc_rdlppfbdtcnc_wrlppfbdtcnc_rdpscdedge2 Read cutting condition file(edge cutting data)cnc_wrpscdedge2 Write cutting condition file(edge cutting data)cnc_rdlpscdpwrctl Read cutting condition file(power control data)cnc_wrlpscdpwrctl Write cutting condition file(power control data)cnc_rdldsplc2 Read command data of reference displacecnc_wrldsplc2 Write command data of reference displaceCNC: Function related to WIRE CUTFunction Name Brief descriptioncnc_setvrtclpos Set wire vertical positioncnc_rdmsptype Read the measured point type datacnc_wrmsptype Write the measured point type dataCNC: Function Reference related to data server,DNC1,DNC2,OSI-EthernetFunction Name Brief descriptioncnc_dtsvftpget Transfer file from host to DATA SERVERFunction Referencefile:///C|/Users/heyang/Desktop/FOCAS_Api_Help/Document/flist_com.htm[2018/1/2 16:51:50] cnc_dtsvftpput Transfer file from DATA SERVER to hostcnc_dtsvftpstat Read status of file transfer between host and DATA SERVERcnc_dtsvrdpgdir Read directory in DATA SERVERcnc_dtsvdelete Delete file in DATA SERVERcnc_dtsvdownload Download from DATA SERVER to CNCcnc_dtsvupload Upload from CNC to DATA SERVERcnc_dtsvcnclupdn Cancel upload/download between DATA SERVER and CNCcnc_dtsvupdnstat Read upload/download status between DATA SERVER and CNCcnc_dtsvgetdncpg Get DNC operation file name in DATA SERVERcnc_dtsvsetdncpg Set DNC operation file name in DATA SERVERcnc_dtsvrdset Read setting data for DATA SERVERcnc_dtsvwrset Write setting data for DATA SERVERcnc_dtsvchkdsk Check hard disk on DATA SERVERcnc_dtsvhdformat Format hard disk on DATA SERVERcnc_dtsvsavecram Save I/F buffer for DATA SERVERcnc_dtsvrdcram Read I/F buffer for DATA SERVERcnc_dtsvmntinfo Read maintenance information for DATA SERVERcnc_dtsvgetmode Get mode of DATA SERVERcnc_dtsvsetmode Set mode of DATA SERVERcnc_dtsvrderrmsg Read error message for DATA SERVERcnc_dtsvwrfile Transfer file from personal computer to DATA SERVERcnc_dtsvrdfile Transfer file from DATA SERVER to personal computercnc_rddncfname Read DNC file name for DNC1, DNC2, OSI-Ethernetcnc_wrdncfname Write DNC file name for DNC1, DNC2 ,OSI-Ethernetcnc_rdcomparam Read communication parameter for DNC1, DNC2 , OSI- Ethernetcnc_wrcomparam Write communication parameter for DNC1, DNC2, OSI-Ethernetcnc_rdcomlogmsg Read logging message for DNC2cnc_rdcomopemsg Read operator's message for DNC1,DNC2cnc_rdrcvmsg Read receipt message for OSI-Ethernetcnc_rdsndmsg Read sending message for OSI-Ethernetcnc_sendmessage Send message for OSI-Ethernetcnc_clrmsgbuff Clear message buffer for OSI-Ethernetcnc_rdrcvstat Read receipt status of message for OSI-Ethernetetb_rdparam Get Ethernet board parameteretb_wrparam Set Ethernet board parameteretb_rderrmsg Get error message of Ethernet boardFunction Referencefile:///C|/Users/heyang/Desktop/FOCAS_Api_Help/Document/flist_com.htm[2018/1/2 16:51:50] ds_rdmode Get DATA SERVER modeds_wrmode Set DATA SERVER modeds_rdhddinfo Get hard disk information of DATA SERVERds_rdhdddir Get hard disk file list of DATA SERVERds_delhddfile Delete hard disk file of DATA SERVERds_copyhddfile Copy hard disk file of DATA SERVERds_renhddfile Change of hard disk file name of DATA SERVERds_puthddfile PUT of hard disk file of DATA SERVERds_mputhddfile MPUT of hard disk file of DATA SERVERds_rdhostinfo Get host login directory information of DATA SERVERds_rdhostdir Get host file list of DATA SERVERds_rdhostdir2 Get host file list of DATA SERVER (2)ds_delhostfile Delete host file of DATA SERVERds_gethostfile GET of host file of DATA SERVERds_mgethostfile MGET of host file of DATA SERVERds_rdresult Get execution result of function of DATA SERVERds_cancel Stop function for DATA SERVERds_rdncfile Input of NC file in DATA SERVERds_rdncfile2 Input of NC file in DATA SERVER (2)ds_wrncfile Output of NC file in DATA SERVERds_rdfile Input of NC file in DATA SERVER (DATA SERVER -> PC)ds_wrfile Output of NC file in DATA SERVER (PC -> DATA SERVER)ds_rddnchddfile Get hard disk file name of DATA SERVER for DNC operationds_wrdnchddfile Set hard disk file name of DATA SERVER for DNC operationds_rddnchostfile Get host file name of DATA SERVER for DNC operationds_wrdnchostfile Set host file name of DATA SERVER for DNC operationds_rdhostno Get connected host of DATA SERVER。
ELMO驱动器调试方法.

以色列ELMO 驱动器调试过程双击compose 嗽件的快捷方式,进入composer 软件界面,点击“Create a NewApplication 。
'进入下一界面,P 匕出^ E nl^ N =w jCtjpl I Hd( H -Anzlciiicr M JIPGnesra -----L ®' 5 uCMSzf.l ConmniGshfln r-apeHe*P EMiiMrIril : US yq 出 COUl;内汕叩叫水吐 內rip N OHLKrlrct Cnnkmimicntrnn lypr /incl vyniiiecHuiiii will auitwiMlical^ Ibepmccfeficd a 匚cording Ihc p sramrrrri flhrvT when ihc (INnxtJ hirtinn is vlliiied.II) Lrdifr hj Jiflvru ill enimmiinknliod pnr 叢euNu.爭 uat thr fPmnertifiA...} hiittnn.输入一个应用文件名(如:Application1,在选择“Select Communication Type 选择“ RS 2321讯方式,点开“Propertie 对话框,5eeciCr »h-ur*icacnTi »e dipF I JletH 、 I Cmral在“Motor Manufacturer Name 选择电机的制造厂商,在“Motor P/N 对话框里选 择相应型号的电机,接着选择“Motor type 女如果没有该电机的制造厂商,则选择“Myr-Afflicatcr Naira白 |泞|1|[LJ scDniicdril :1 WliU|bi|/5ComiTiuiiicDtiDn Type anrlvuniniedlviiii will jiulufTiuIItally b= procHEECil 』匚curding ihc pBraiaerer^ ahrvr wunn ms iNuxn ihimon iw clldied.<SIn Lr Jttr Id (jvl dlflurtml选择C0M1、19200波特率,无寄偶校验。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
用户手册版本 3.4© @ Grontmij Nederland bv版权所有商标文档中所涉及的所有商标名称和产品名称均为所属公司或所有者的注册商标。
版权申明此软件产品受版权的保护,并且版权归荷兰Grontmij公司所有。
授权的合法使用者只能把程序拷贝到自己的电脑上,并只能拥有执行程序的权利。
拷贝、复制、销售或者以其它任何方式散布本产品都是违法版权法的行为。
本手册也受版权的保护,保留应有的权利。
尽管我们在手册的准备工作上花了很大心血,但是漏洞和错误肯定在所难免,敬请读者和用户批评指正,以便更新。
关于这里涉及的内容,荷兰Grontmij公司没有授权给任何人,也没有特别声明商业或者其他目的的授权。
荷兰Grontmij公司敬请注意:设计和规范如有变更,恕不另行通知。
@ Grontmij Nederland bvBovendonk 29, P.O. Box 1747, 4700 BS Roosendaal, The Netherlands Telephone +31-165-575859; Telefax +31-165-561368E-mail MOVE3@Grontmij.nlhttp:// (English and Dutch);http:// (中文)MOVE3软件手册目 录用户手册1版本 3.4 1商标2版权申明2目 录3 1.开始51.1.介绍61.1.1.概要61.1.2.关于这个手册61.1.3.MOVE3 规范61.2.软件安装81.2.1.软件包内容81.2.2.所需的硬件和软件支持81.2.3.安装程序81.2.4.开始使用MOVE3 81.2.5.指南92.怎样使用MOVE3 102.1.介绍 112.1.1.系统总览 112.2.MOVE3 模型 122.2.1.概要 122.2.2.观测值类型 132.2.3.维数切换和观测值类型 152.2.4.组合观测值 172.2.5.更多的信息 193.大地测量学的基本概念 203.1.引言 213.2.参考系统 223.2.1.概述 223.2.2.全球和局部坐标系 233.2.3.大地水准面和高程 243.2.4.基准转换 253.3.地图投影 263.3.1.投影的目的和方法 263.3.2.横轴墨卡托投影 273.3.3.兰勃托投影 273.3.4.球面投影 283.3.5.局部(球面)投影 293.4.GPS 303.4.1.概述 303.4.2.GPS 观测 303.4.3.控制网中的GPS 313.4.4.GPS随机模型 323.4.5.GPS和高度 323.5.碎部测量 333.5.1.几何关系 33Contents Manual MOVE33.5.2.理论精度 353.5.3.偏心观测 354.质量控制 374.1.介绍 384.1.1.平差、精度、可靠性和检验 384.1.2.控制网设计过程中的质量控制 394.2.最小二乘平差 404.2.1.概要 404.2.2.函数模型 404.2.3.随机模型 414.2.4.自由网平差和约束平差 434.2.5.公式 434.3.精度和可靠性 454.3.1.概要 454.3.2.精度 464.3.3.可靠性 464.4.统计检验 484.4.1.概要 484.4.2.F-检验 484.4.3.W-检验 494.4.4.T-检验 504.4.5.对检验结果的解释 514.4.6.估计误差 515.列表 535.1.地图投影和常数的列表 545.2.参考文献 565.3.术语表 57索引601. 开始1.1. 介绍1.1.1. 概要MOVE3 是由荷兰Grontmij公司开发的可用于3维、2维和1维大地测量控制网设计和平差的多功能软件包。
MOVE3遵循控制网设计和平差的Delft理论之要求和规范。
Delft理论是公认的用于测量数据处理和质量控制的效率最高的工具。
MOVE3完全可以处理与3维控制网有关的所有复杂的数学问题。
因此,3维平差可以在真正的3维数学模型里进行,不需要简化或折衷处理。
除了用于3维平差之外,此软件也可以进行2维和1维平差。
这项功能可以由所谓的维数切换(Dimension Switch)来控制。
MOVE3可以处理所有的以任何形式组合的大地测量数据。
当有3维观测值时,MOVE3可以解算出位置和高程;如因观测值的维数限制,MOVE3也可以解算2维或1维的解。
原则上,MOVE3只要求观测值的维数足够这一个唯一要求。
MOVE3具有易于操作,几乎不需要培训的优点。
使用标准的Windows图形用户界面(GUI),下拉式菜单操作,并提供数据编辑器、智能绘图、鼠标控制、标准的ASCII文件I/O和丰富的在线帮助等功能。
1.1.2. 关于这个手册MOVE3用户手册分为以下几个部分:•第1章:开始, 介绍软件的总体信息,包括对程序安装的简述。
•第2章:怎样使用MOVE3, 提供使用MOVE3软件的大体信息。
更详细的信息可以在MOVE3 Windows用户界面的在线帮助工具中找到。
•第3章:大地测量学的基本概念, 介绍MOVE3理论原理的一些概念:包括参考系统、地图投影,GPS和碎部测量。
•第4章:质量控制, 主要介绍MOVE3中进行质量控制的工具。
第4.4节的主要内容是简单介绍控制网数据处理Delft理论。
•第5章:列表, 包含附加的、与软件相关的、技术性的信息,这部分也包括参考文献、术语和索引。
用户在开始使用本软件之前不用从头至尾地阅读本手册。
按照软件的安装,你可以依据使用速成迅速地开始尝试使用。
软件的具体使用将在第2章给出。
相关主题的详细内容将在第3章和第4章进一步解释。
因此,当需要进一步解释时,用户可以参阅手册的后面的有关部分。
1.1.3. MOVE3 规范系统的最小配置:• Windows NT/2000/XP;•带并口或USB口。
处理能力对控制网的最大尺寸只受硬件条件的限制。
观测值MOVE3 可以联合处理地面传统观测值和GPS观测值:•方向(每个测站最大可含100个独立方向);•距离(每个控制网最大可含10个尺度因子);•天顶角(每个控制网最大可含10个折光系数);•方位角(每个控制网最大可含10个方位角偏移量);•高差;•局部坐标系;• GPS基线;•观测的GPS坐标;Introduction Manual MOVE3 •几何关系,如:•3点之间的角度(包括垂直角);•平行线(包括两条线之间的距离);•共线;•互相垂直的线;•点到线的距离;•链距和偏距(支距测量经常使用);•距离交会;•钢尺量距;•等同。
处理模型3维, 2维和1维的大地控制网均能处理;•设计模式,自由网;•设计模式,约束网;•平差模式,自由网;•平差模式,约束网。
投影支持以下的投影:一般的:•横轴墨卡托投影;•兰勃托投影;•球面投影;特殊的:• RD (荷兰);•兰勃托 72 (比利时);•高斯-克吕格(德国);•局部(球面);• BRSO;•马来西亚RSO (Malaysian RSO);•瑞士。
工具MOVE3 包括几个独立的工具,例如全自动近似坐标的计算(COGO3),自动闭合环探测和闭合差检验(LOOPS3),平差预分析(PRERUN3)。
概述•文件打开格式(HTML 文件);•语言支持:英语、荷兰语、中文;•具有与GPS基线处理软件包(Ashtech, DSNP, Leica, Sokkia, Spectra Precision,Topcon, Trimble 和 Zeiss)的接口;•具有与全站仪记录文件(Leica, Topcon, Sokkia 和Trimble)的接口;•具有与来自 Leica, Topcon, Sokkia 和 Zeiss数字水准仪的数字水准文件的接口;•具有与荷兰、美国和加拿大的大地水准面模型的接口;•输出DXF文件;•在线帮助工具。
MOVE3软件手册1.2. 软件安装1.2.1. 软件包内容The MOVE3 软件包包含以下部分:• MOVE3安装 CD;• MOVE3 加密狗。
1.2.2. 所需的硬件和软件支持以下是运行MOVE3的软件、硬件配置要求:•带有并口或USB口的PC机;• MOVE3软件加密狗。
以下是运行MOVE3的软件要求:• Windows NT/2000/XP;• MOVE3 软件;•警戒驱动程序。
1.2.3. 安装程序有关安装程序,参见MOVE3 CD中的安装指南。
1.2.4. 开始使用MOVE3点击Windows开始菜单程序下面的MOVE3就可以打开MOVE3。
在Windows资源管理器下双击PRJ 文件,可迅速导入一个工程。
1.2.5. 使用速成参见使用速成,用户可以熟悉使用MOVE3软件处理控制网数据的流程。
2. 怎样使用MOVE32.1. 介绍手册的第2部分将为用户提供使用MOVE3控制网平差软件的一些信息。
此软件由Windows用户界面和一些计算模块组成。
Windows用户界面为用户提供对计算模块所必须的所有参数或选项的全面控制。
这些选项和参数在MOVE3 Windows用户界面的在线帮助里面将有描述。
本手册在这部分将讨论MOVE3的模型,集中介绍作为MOVE3的主要特征之一的维数切换(Dimension Switch),使用维数切换本身相当简单,然而维数的选择对观测值类型的处理有一定的影响。
因此,本章关于维数切换的部分非常重要。
2.1.1. 系统总览MOVE3执行的所有任务的都是从Windows用户界面开始的。
因此,用户在进行平差计算时不能离开用户界面,这样可以检查和改变数据等。
一般来说,数据管理(读取、编辑、显示、保存)由用户界面来完成,数据处理(准备、检查和平差)由计算模块来完成。
软件系统由以下的计算模块组成:• COGO3用来计算近似坐标;• GEOID3 用来从荷兰、美国和加拿大等大地水准面模型中提取大地水准面差距;• LOOPS3用来探测控制网的闭合环并计算其闭合差;• PRERUN3 用来进行预平差分析;• MOVE3 用来完成设计和平差计算。
2.2. MOVE3 模型2.2.1. 概要MOVE3采用的数学模型是基于严格椭球的,与解的维数无关。
椭球本质上是一个弯曲的2维表面,第3维是通过在椭球面上定义高程而引入的。
因此未知的坐标参数就是纬度、经度和高程,这些未知数均在内部使用。
用户可以提供近似和/或已知的地图投影坐标(X东,Y北)。
那样,平差后将输出同样的投影坐标,因此就很方便的将椭球模型从用户这一层面上隐去了(图 2.2.1),MOVE3模型内部所采用的高程是椭球高。
维图 2.2.1 MOVE3的简单结构当已知大地水准面模型(参见3.2.3节,大地水准面和高程),用户就可以同时输入正高和大地水准面差距,在平差之前,MOVE3将把正高换算为椭球高。