汽车半主动控制悬架的仿真研究
基于模糊控制的汽车半主动悬架的仿真研究

Vo 9 No 5 ll 2 0 1 0 6. 0
机 械研究 与应用
M ECHANI AL C RESEARCH & AP I PL CAT1 0N
第l 9卷
第 5期
20 0 6年 l 0月
基 于模糊 控 制 的汽 车半主 动悬架 的仿 真研 究 ’
c to a i n.
Ke r s u re ft e a tmo i o y e —a t e s s e so ;f zy c nr l r i lt n y wo d :q at ro u o b l b d ;s mi ci u p n i n u z o t l ;smua i h e v oe o
su y t o h smu ain b ig M ATLAB td hrug i lto yusn /Si ln ho h tte p ro ma e o y r ui emi a tv u p n in wih f z y mu ik s wst a h e fr nc fh d a c s l — c ie s s e so t u z c nr l r i te h n t a fp sie s s e so I i u c sf le a l fs mi— a tv us e so n v hc ed sg p l- o tol sbetrt a h to a sv u p n in. t sas c e su x mpe o e e cie s p n i n i e il e in a p i
真 和 分析 , 以验 证 控 制 算 法 的有 效 性 , 半 主动 悬架 在 车 辆 上 为
』・ = ・ : 一 :一 一 ; ( ・ ( ) n・ 一 ) ・
【 2 =k( 一 )+ m之 s
汽车半主动悬架控制策略研究

口 薛显锋 口 庞 辉
70 7 10 7 1 两安 两 电 高 压 电 瓷 有 限 责任 公 司 西 安 .
2 西 北 工 业 大 学 机 电 学 院 西 安 .
7 0 7 10 2
摘
要 : 对 汽 车被 动 和 主 动 控 制 悬 架 系统 存在 的 问题 , 立 了半 主 动 悬 架 的控 制 模 型 , 出 了一 种联 合 的 天棚 地 棚 针 建 提
棚 控 制策 略 。 地 棚控 制 策略用 微 分方 程描 述 为 :
充 分 考 虑 其 非 线 性 特 性 。 汽 车 半 主 动 悬 架 是 一 种 能 够
根 据 汽 车 每 一 时 刻 的 运 动 状 态 和 路 面 激 励 情 况 , 随 时
调 整 悬 架 元 件 .使 悬 架 永 远 处 于 最 优 减 振 状 态 的 新 型
计 算 机 信 息, o s2 )  ̄ o (3.
纵 稳 定 性 . 必 须 尽 可 能 压 制 非 簧 载 质 量 有 频 率 附 近 的 “ 跳 ”现 象 。同 时 , 簧 载 质 量 的 位 移 、 度 和 加 速 轮 非 速 度 的 变 坏 可 间 接 反 应 路 面 输 入 的 状 态 。 当 非 簧 载 质 量 振 动 增 大 时 , 应 设 置 有 效 的 阻 尼 减 小 非 簧 载 质 量 的 振 动 。基 于 这 一 想 法 , 利 用 天 棚 阻 尼 的思 想 。 出 了 地 并 提
[ ] 崔 世 钢 , 正 光 . 于 AR 的新 型 远 程 脑 服务 机 器 人控 制 2 廉 基 M 系 统 设 计 [ ] 天 津 工 业 大 学 学 报,o 64. J. 2o( ) 3 卞 海 浪 , 星新 . 于 A M 的绣 花 机 控 制 系统 设 计 『 ] 微 ] 万 基 R J.
半主动车辆座椅悬架系统的控制制与仿真

VhlEger 车辆工程 ei nien c e n i g
整 定方 法是 :初 定 比例 系数 之后 .加 入 积分 环
节 , 整 定 积 分 系 数 。 首 先 在 调 节 初 期 设 置 较 小 的
由 图 3 知 。正 弦 激 励 下 , 在 针 对 座 椅 加 速 度 可
11 P D控 制 原 理 . I
的参 数 ,实现 良好 的控制 效果 。而如何 进行 参数 的
整 定 是PD 制 策 略能 否 达 到预 定 要求 的关 键 。对 I控
在模 拟控 制 系统 中 ,PD控制 是 最 常 用 的控 制 I 方式闼 I 控 制系统 由PD 制器 和被 控对 象组成 , 。PD I控 其控 制 系统原 理如 图 1 示 。 所
于PD 制 器参 数 的调 节 ,可 以参 考 经验 公 式 以及 I控
不 同参 数下仿 真 结果 中最理 想结 果所 用 的参数 来选 定【 3 ] 。本 文 中 的控制 对 象是 模 拟 车辆 垂 直 方 向 的加
速 度 ,属 于 典 型 的偏 差 控 制 负 反 馈 结 构 , 可 以 采 用
1 P I控 制 策 略 分 析 I ) PD控 制 是 最 早 发 展 起 来 的 控 制 策 略 之 一 , 在 I
为座椅 加速 度 ,作 为信 号 ,定值设 置 为0 。 在 Mal /i uik 境 中 .建立 以座 椅 加 速 度 t bSm l a n
为 控 制对 象 的PD控 制 半 主 动 座 椅 系 统 仿 真 模 型 , I
车辆工程 Vh l ni e ei g er cE n目的是 在外 界路 面输 入 随 机改 变等 外扰作 用下 ,减 少振 动 ,保证 车辆 的乘 坐 舒适性 。基于磁 流 变半 主动座 椅悬 架 的减振 性能 不 仅 与磁流 变阻 尼器 自身 的设计 结构 、磁 流变 阻 尼 材 料性 能有 关 ,还与 半 主动悬 架 的控制 策略有 很 大 关 系 ,因此 ,选 取有 效 、便捷 的控 制方 式是 改善 座 椅 减振性 能 的重要 工作 。
基于整车的汽车半主动悬架系统模糊控制仿真研究
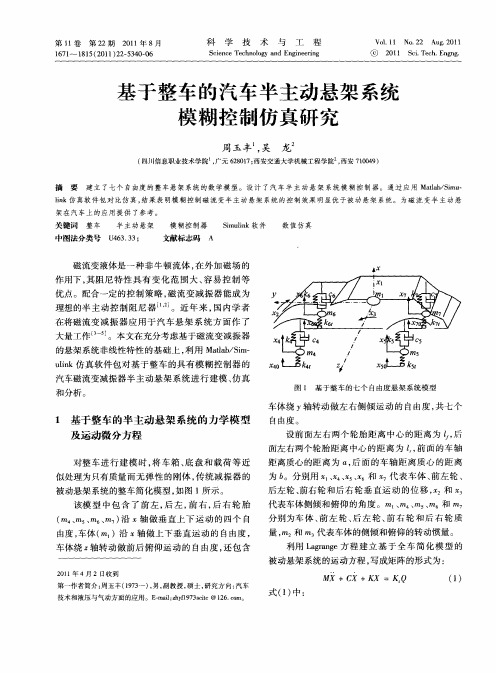
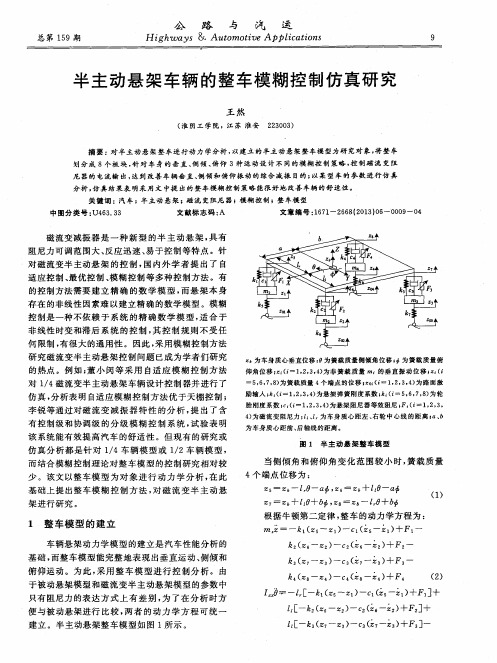
图 1 基 于 整 车 的 七 个 自由 度 悬 架 系 统 模 型
车体 绕 Y轴 转动 做 左 右侧 倾 运 动 的 自由度 , 七 个 共
1 基于 整车 的半 主动 悬 架 系统 的 力学 模 型 及运动微分方程
对整 车 进 行 建 模 时 , 车 箱 、 盘 和 载 荷 等 近 将 底
关键词 整车 中图法分类号
半主动悬架 U 6 .3 4 33 ;
模 糊控 制器 文献标志码 A
S uik软件 i l m n
数值仿真
磁 流变 液体是 一种 非 牛 顿 流体 , 外加 磁 场 的 在 作 用下 , 阻 尼 特 性 具 有 变化 范 围 大 、 易 控 制 等 其 容 优 点 。配合 一定 的控 制 策 略 , 流 变减 振 器 能成 为 磁 理想 的半 主 动 控 制 阻尼 器 【2。近 年 来 , 内学 者 1j . 国 在将磁 流 变 减 振 器 应 用 于 汽 车 悬 架 系 统 方 面 作 了
第 1卷 1
第2 2期
21 0 1年 8月
科
学
技
术
与
工
程
Vo.1 No 2 Au . 011 1 1 .2 g2
17 ~ 11 2 1 2 —30 0 61 8 5( 0 1) 2 5 4 — 6
S in e T c n l g n gn e i g ce c e h o o y a d En i e rn
由度 , 车体( m )沿 轴做上下垂直运动 的 自由度 ,
车 体绕 轴 转 动做 前 后 俯 仰 运 动 的 自由度 , 包 含 还
2 1 年 4月 2 口收 到 01
量 , , m 代表车体的侧倾和俯仰 的转动惯量 。 m 和
半主动悬架LQR控制策略的仿真研究
m
- z
一
w
..
…
…
k 、 — 。 … …
,
,
一
一
k w 州h ( 一 )+
( 1 )
选 取系统 的状态 变量 与输 出变 量分别 为 :
=
[ 6一 " , 6 , 一^ , w ] r ;
Y= [ 6 , z 6 一 , 一h ]
l a b / S i m u l i n k 软件进行仿真 , 对所设计 的 L Q R控制 器 的控 制 品质 进行 了验 证分 析 .
ቤተ መጻሕፍቲ ባይዱ
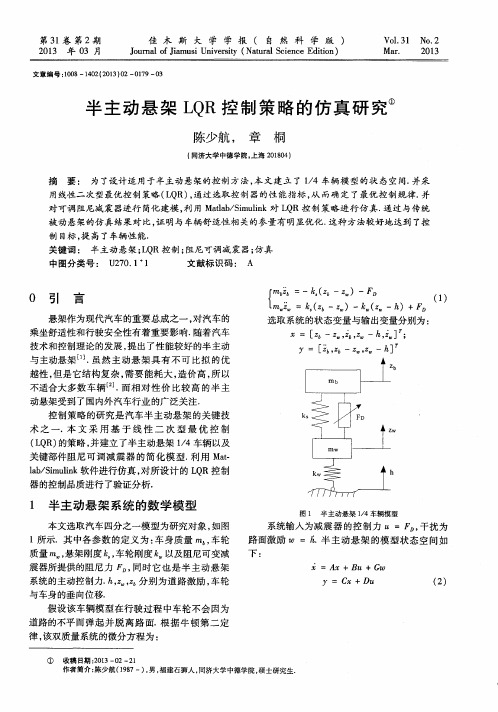
1 半主 动悬架 系统 的数 学模 型
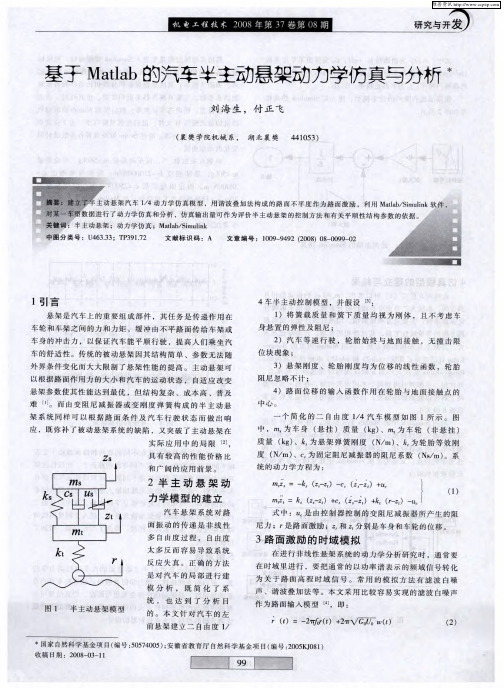
本 文选取 汽 车 四分 之 一模 型为 研究 对象 , 如 图 1 所示.其 中各参数 的定义为 : 车身质量 m , 车轮 质量 m , 悬 架 刚度 k , 车 轮 刚度 k 以及 阻尼 可变减 震器 所 提供 的阻 尼力 , 同 时它 也 是 半 主 动悬 架 系统 的 主动控 制力. h , , 分 别 为 道 路激 励 , 车轮
zb i f b=-k , (
一
0 引 言
悬 架作 为现 代汽 车 的重要 总成 之 一 , 对 汽 车 的 乘坐舒 适性 和行 驶安 全性 有着 重要 影 响. 随着汽 车 技术 和控制 理论 的发 展 , 提 出了性 能较 好 的半 主动 与 主动悬 架 ¨ j . 虽 然 主 动 悬 架 具 有 不 可 比 拟 的 优
第3 1 卷 第2 期
2 0 1 3 年 O 3月
佳 木 斯 大 学 学 报 (自 然 科 学 版 )
J o u na r l o f J i a m u s i U n i v e r s i t y( N a t u r a l S c i e n c e E d i t i o n )
《2024年连续可调阻尼减振器设计与半主动悬架的控制算法仿真》范文
《连续可调阻尼减振器设计与半主动悬架的控制算法仿真》篇一一、引言随着汽车工业的快速发展,车辆行驶的平稳性和舒适性越来越受到人们的关注。
连续可调阻尼减振器作为一种新型的减振装置,在提高车辆行驶的平稳性和舒适性方面具有重要作用。
本文将介绍连续可调阻尼减振器的设计原理及其实现在半主动悬架系统中的应用,并对其控制算法进行仿真分析。
二、连续可调阻尼减振器设计2.1 设计原理连续可调阻尼减振器通过改变阻尼力的大小,实现对振动能量的有效吸收和耗散。
其设计原理主要依赖于阻尼材料的特性以及结构设计。
在阻尼材料的选择上,需要选择具有高能量吸收、高稳定性及耐久性的材料。
在结构设计上,要考虑到阻尼力的调节范围、调节速度以及结构的紧凑性等因素。
2.2 结构设计连续可调阻尼减振器的结构设计主要包括活塞、阻尼材料、油封等部分。
其中,活塞的设计要考虑到其运动轨迹的精确性和稳定性;阻尼材料的选择和布置要保证其在各种工况下都能发挥良好的减振效果;油封的设计要保证油液的密封性,防止油液泄漏。
三、半主动悬架系统设计与实现3.1 半主动悬架系统原理半主动悬架系统通过调整减振器的阻尼力,实现对车辆振动的有效控制。
与传统的被动悬架相比,半主动悬架具有更高的控制精度和适应性。
在半主动悬架系统中,减振器是核心部件,其性能直接影响整个系统的性能。
3.2 半主动悬架系统实现在半主动悬架系统中,通过传感器实时监测车辆的振动情况,并将数据传输给控制器。
控制器根据接收到的数据,通过控制算法调整减振器的阻尼力,从而实现对车辆振动的有效控制。
此外,还需要对传感器和控制器进行优化设计,以提高系统的稳定性和可靠性。
四、控制算法仿真分析4.1 仿真环境与模型建立为了对半主动悬架系统的控制算法进行仿真分析,需要建立相应的仿真环境和模型。
仿真环境应包括车辆的动力学模型、路面模型、传感器模型、减振器模型等。
在建立模型时,需要考虑到各种因素的影响,以保证仿真的准确性和可靠性。
车辆半主动悬架系统控制的研究与仿真
一
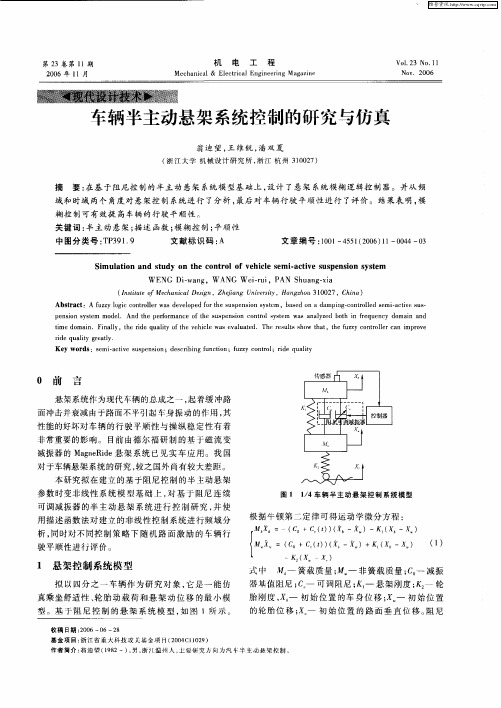
1 悬架控制系统模 型
拟 以 四分 之一 车 辆作 为研 究 对 象 , 是 一能 仿 它
式中
一 簧载质 量 ; 一 非 簧 载质 量 ; 。 减振 C一
器 基值 阻尼 ; 可 调 阻尼 ; . 悬 架 刚度 ; 轮 C一 K一 K一
真乘 坐舒适 性 、 轮胎 动 载 荷和 悬 架 动 位 移 的最 小 模
型 。基 于 阻 尼 控 制 的 悬 架 系统 模 型 , 图 1 示 。 如 所
收 稿 日期 :0 6— 6—2 20 0 8 基 金 项 目 : 江 省 重 大 科 技 攻 基金 项 日(0 4 10 9 浙 2 0 C 12 )
胎 刚 度 , 一 初 始 位 置 的车 身位 移 ; 一 初 始位 置
Ke y wor ds; s mia tv us e in;de ci n un to e -c ie s p nso s rbig f ci n;t z onr l i uaiy uzy c to ;rde q lt 0 前 Nhomakorabea言
半主动悬架的自适应滑模控制算法研究

半主动悬架的自适应滑模控制算法研究摘要:本研究聚焦于半主动悬架的自适应滑模控制算法,旨在通过深入的理论分析和实验验证,提升车辆行驶的平顺性和稳定性。
半主动悬架作为一种先进的汽车悬架系统,能够通过传感器感知路面状况和车身姿态,实时调节阻尼参数,从而优化车辆性能。
而自适应滑模控制算法的应用,则能进一步提升半主动悬架的性能表现。
我们提出了一种基于改进的理想天棚系统的自适应滑模变结构控制算法。
该算法的核心在于在实际被控系统和参考模型之间的误差动力学系统中产生渐进稳定的滑模运动。
通过李雅普诺夫稳定性原理,我们证明了所设计的滑模控制算法的稳定性。
以某重型车辆为例进行的MATLAB 仿真结果显示,与传统被动悬架和最优控制相比,自适应滑模控制器能够显著改善车辆的平顺性,并对模型参数的不确定性和外界扰动展现出良好的适应性和鲁棒性。
滑模控制算法也存在抖振问题,这也是未来研究需要重点关注的方向。
为了解决这一问题,我们探讨了各种削弱抖振的方案,并在实验验证中观察到滑模控制的抖振现象相对较小,这表明所设计的滑模控制器能够很好地改善悬架性能,达到预期效果。
我们还研究了轮胎阻尼对悬架系统性能的影响,提出了一种考虑轮胎非线性阻尼的四分之一车模型。
通过在不同路面条件下的仿真分析,我们深入探讨了滑模控制和天棚控制在不同车速和路面频率下的性能表现。
本研究为半主动悬架的自适应滑模控制算法提供了深入的理论和实验支持,为进一步提升汽车行驶性能提供了新的思路和方法。
滑模控制的抖振问题仍需进一步研究和完善,以适应更复杂的道路和驾驶条件。
Abstract:This study focuses on the adaptive sliding mode control algorithm of semi-active suspension, aiming to improve the smoothness and stability of vehicle driving throughin-depth theoretical analysis and experimental verification. As an advanced automotive suspension system, semi-active suspension can perceive road conditions and body posture through sensors, adjust damping parameters in real time, and optimize vehicle performance. The application of adaptive sliding mode control algorithm can further improve the performance of semi-active suspension. We propose an adaptive sliding mode variable structure control algorithm based on an improved ideal ceiling system. The core of this algorithm lies in generating asymptotically stable sliding mode motion in the error dynamics system between the actual controlled system and the reference model. We have demonstrated the stability of thedesigned sliding mode control algorithm through the Lyapunov stability principle. The MATLAB simulation results using a heavy vehicle as an example show that compared with traditional passive suspension and optimal control, the adaptive sliding mode controller can significantly improve the smoothness of the vehicle, and demonstrate good adaptability and robustness to the uncertainty of model parameters and external disturbances. The sliding mode control algorithm also has the problem of chattering, which is also a focus of future research. To address this issue, we have explored various solutions to reduce chattering and observed in experimental verification that the chattering phenomenon of sliding mode control is relatively small. This indicates that the designed sliding mode controller can effectively improve suspension performance and achieve the expected results. We also studied the effect of tire damping on suspension system performance and proposed a quarter car model that considers tire nonlinear damping. Through simulation analysis under different road conditions, we delved into the performance of sliding mode control and canopy controlunder different vehicle speeds and road frequencies. This study provides in-depth theoretical and experimental support for the adaptive sliding mode control algorithm of semi-active suspension, and provides new ideas and methods for further improving the driving performance of automobiles. The chattering problem of sliding mode control still needs further research and improvement to adapt to more complex road and driving conditions.一、概述随着汽车工业的不断发展,对车辆行驶平顺性和稳定性的要求也在日益提高。
基于Matlab的汽车半主动悬架动力学仿真与分析
,
但结构复杂
、
成本高
普及
中心
) 路 面 位移 的输 入 函 数 作 用 在 轮 胎 与地 面 接 触 点 的
难
…
。
而 由变 阻 尼 减 振 器 或 变 刚 度 弹 簧 构 成 的 半 主 动 悬
。
架 系 统 同样 可 以 根 据 路 面 条 件 及 汽 车行 驶 状 态 而 做 出 响
应
,
一
个 简 化 的 二 自 由 度 1 /4 汽 车 模 型 如 图 1 所 示
语 音 的格 式 编 写 M 文 件 ;最后 在 模 型 窗 口中点 击 下 拉 菜 单 中 的 Sat 开 始 仿 真 ,通 过 S o e模 块 观 看 各 参 数 随 时 间 t 项 r cp 变 化 的动 态 曲 线 。
根 据 有 关 数 据 一 设 车 身 质 量 m : 6 k ,车 轮 质 量 , 5 0g
。
具 有较 高 的性 能 价格 比
和广 阔的应 用 前景
。
、
。
为 固 定 阻 尼 减 振 器 的 阻 尼 系 数 ( N s /m )
:
系
统 的动力 学 方程 为
m
s
2
半主动悬 架 动
汽 车悬 架 系 统 对 路
缸
。
-
k
,
(z
—
-
~
z
t
) _G
+ c
,
(z (z
一
-
~
z
t
) +‰
+
}
—
( 1)
力学模 型 的建 立
,
太 多反 而容易导致 系统
通 常要
车辆半主动悬架最优控制方法研究
车辆半主动悬架最优控制方法研究一、引言车辆悬架系统对车辆行驶性能和乘坐舒适性有着重要影响,悬架系统的控制方法研究是提高车辆安全性能和行驶舒适性的关键之一。
车辆悬架系统的控制方式可分为主动、半主动和被动三种,其中半主动悬架系统因为具有较好的安全性能和经济性,近年来受到了研究者的广泛关注。
本文旨在研究车辆半主动悬架最优控制方法,提高车辆行驶性能和乘坐舒适性。
二、车辆半主动悬架系统车辆悬架系统主要由减震器、弹簧和悬架支撑等组成。
在半主动悬架系统中,增加了一些控制器和执行器,通过调整减震器和弹簧的刚度和阻尼来控制车辆悬架系统的状态。
半主动悬架系统根据控制方式可分为阻尼可调和弹簧可调两种。
阻尼可调悬架最早应用于赛车领域,通过控制阻尼来减小车身振动,提高行驶稳定性。
弹簧可调悬架则利用可变刚度弹簧来调整悬架系统阻尼和刚度,实现悬架系统的控制。
半主动悬架系统的控制方式有当前反馈、预测控制和模型参考控制等,其中预测控制是一种现在较为流行的控制方法。
三、车辆半主动悬架最优控制方法半主动悬架系统最优控制方法的目标是最大限度地提高车辆行驶性能和乘坐舒适性。
提高行驶性能需要控制车辆的悬架系统调整,提高车辆的悬架系统的阻尼和刚度,减小车身的姿态变化,提高悬架系统对路面的适应能力。
提高乘坐舒适性需要减小车辆悬架系统的振动,提高乘坐的平稳性和舒适性。
最优控制方法包括控制器设计和优化问题两个方面。
控制器的设计可以采用反馈线性二次型控制器,并采用Kalman滤波器估计状态变量。
为了确保悬架系统的最优性能,需要根据不同车辆和不同路面情况进行优化设计。
优化问题中,应该考虑到车辆行驶的安全性能和乘坐舒适性。
可以采用多目标优化方法,将行驶安全性能和乘坐舒适性综合考虑,在保证安全性能的前提下,最大程度地提高乘坐舒适性。
四、实验结果与分析将半主动悬架最优控制方法应用于某种车辆上,通过实验验证了该方法的有效性。
在不同路面条件下,实验结果表明,半主动悬架系统最优控制方法能够显著提高车辆行驶性能和乘坐舒适性。
车辆半主动悬架联合仿真研究
ZHU Hua
( De pt .of Equ i pme nt Te chn ol o g) r ,I n st i t ut e of Aut omobi l e Mana gemen t ,Beng bu 233011,Chi na)
一...州●‘…‘~^…‘‘‘。.....’‘.....。“·’‘‘。’...‰·‘.....·_....‘“’‘…’。‘。.....。".I....··^.....‘。‘‘。。‘’…...t .’.- ...w....- ‘’’。h’。‘.....¨......“‘b‘.....…。。’’。’‘’‘…‘。‘‘I _‘..。…‘。””’’h’“..........。’··^.....…札‘.....Ⅲ
l l c n t r ez , 铆 记 妣 渤 饼 以 £ 沈 力 枷 如 鲫 Q,:,h韶) ,cDmroz 5emi —傥£劫e s£‘叩e瑚面n s 弘纪m n阳陀d眦ed功台c一}
s n6 pe r P e e aM £ £切e耖,6Dm£,圮一如c D,礁加以∞以^nnd托,w 饿 炒 咖 蝴 旷 胁 口 矗 幻 如 gre磁纱i ,r驴r伽e反
个铰 接副约 束5个自由 度,1个球副 约束3个自 由度, 1个 移动副 约
束5个 自由 度, 1个 固定 副约 束6个自 由度 ,1个万 向节 副约 束4个
自由度,1个驱动约束1 个自由度,所以模型的自由度汁算式:
脚×8_5×l 一3×l - 5×3.6×3—4Xl -2
( 1)
参考文献
1 webb RL,蹦nci pl ∞of el l l l 彻ced he砒t m瑚f er [ M] .NewYor k:J ohnwi l l ey
文章 编号:10 0l 一399 7( 20l O) 12- 0200— 03
基于磁流变阻尼器的汽车半主动悬架控制策略研究

基于磁流变阻尼器的汽车半主动悬架控制策略研究摘要:本文旨在研究基于磁流变阻尼器的汽车半主动悬架控制策略,探究其在汽车行驶中的稳定性和舒适性。
首先介绍了磁流变阻尼器的工作原理及其在汽车悬架系统中的应用,进一步分析了传统悬架系统的不足之处。
接下来,提出了基于磁流变阻尼器的半主动悬架控制策略——基于荷载反馈的控制策略和基于道路预测的控制策略,并分别进行仿真分析。
最后,通过实验验证了该半主动悬架控制策略在实际驾驶中的有效性和可行性。
关键词:磁流变阻尼器;汽车半主动悬架;荷载反馈控制;道路预测控制;仿真分析;实验验证。
一、绪论汽车行驶中,随着路面状态的不断变化,传统被动悬架系统无法满足不同路况下的需求,导致汽车行驶过程中的不稳定和不舒适,甚至危及行驶安全。
针对此问题,半主动悬架系统应运而生。
与传统被动悬架系统相比,半主动悬架系统能够根据路面状态的变化主动地调整阻尼力,从而提高汽车行驶的稳定性和舒适性。
其中,磁流变阻尼器作为半主动悬架系统的重要组成部分,具有优异的适应性和响应速度。
因此,基于磁流变阻尼器的半主动悬架控制策略备受关注,并取得了较好的应用效果。
二、磁流变阻尼器原理及其在汽车悬架系统中的应用磁流变阻尼器是一种利用磁场作用改变阻尼器阻尼特性的电液体阻尼器。
其主要由金属壳体、约束套、活塞、磁场线圈等部分组成。
在磁场的作用下,阻尼器内的电液体发生形变,从而改变阻尼器的阻尼特性。
磁流变阻尼器具有响应速度快、可调性强等优点,因此广泛应用于汽车悬架和减振系统中。
三、传统悬架系统的不足传统被动悬架系统仅通过弹簧和阻尼器来吸收汽车行驶中的震动,其阻尼特性通常是固定的,不能根据路面状态的变化进行调整。
这种悬架系统在路面起伏不平时,不能很好地满足行驶的需要,导致汽车行驶变得不稳定和不舒适。
因此,需要寻求一种新的悬架控制策略来改善这一问题。
四、基于磁流变阻尼器的半主动悬架控制策略半主动悬架控制技术通过调整磁流变阻尼器的阻尼特性,适应不同路况,实现汽车行驶时的平稳性和舒适性。
汽车半主动悬架系统模糊控制仿真研究
2 9期
徐 晓美 , : 等 汽车半 主动悬架 系统模糊控制仿真研究
70 23
邝
图 2 系 统 动 力 学 模 型
表 1 模 糊 控 制规 则 表
2 模糊控制 器的设 计
模糊 控 制 器 的设 计 主 要 包 括 模 糊 输 入 输 出 变 量及 其论 域 的确 定 、 糊 控 制 规 则 的 确 定 、 糊 化 模 模 和解 模糊 化方 法 的确 定等 内容 。 本文 选 用 了双 输 入 单 输 出 的模 糊 控 制 器 。 由 于车 身 的振 动 加 速 度 是 评 价 汽 车 平 顺 性 的 最 主 要 的指标 之 一 , 取参 考输 入 加 速 度 的均 方 根 值 与 响 选
第 l 0卷
第2 9期
21 0 0年 l 0月
科
学
技
术
与
工
程
V 1 1 N0 2 0c. 0 0 o. O .9 t2 1
17 — 1 1 (O O 2 —220 6 1 85 2 L 1 97 0 —4
S inc c n l g nd Engne rn ce e Te h o o y a i eig
系统 的动 力学模 型 , 图 2所示 。 如
2l O O年 7月 3 日收 到 0
第 一 作 者 简介 : 晓 美 ( 9 8 )女 , 学 博 士 , 京 林 业 大 学 汽 车 徐 17 一 , 工 南
与交通工程学院讲 师。研究方 向: 车辆振 动及控 制 、 流变器件 。 磁
E— i:x m1 0 8 @ 1 6 t n 。 mal x 2 4 0 2 . o i
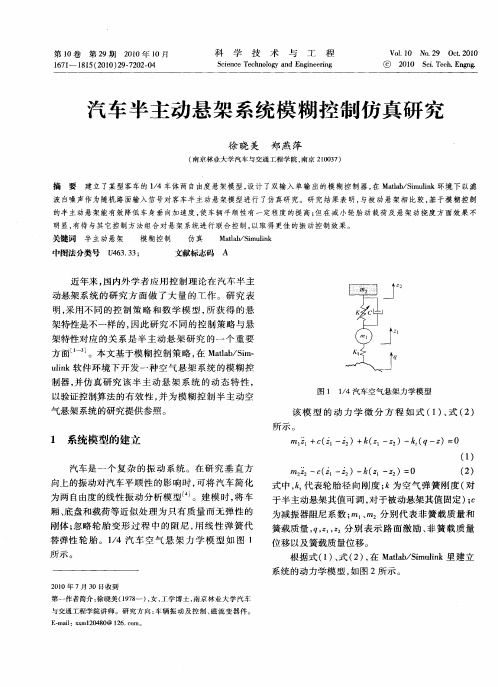
图 1 1 4汽 车 空 气悬 架 力 学 模 型 /
汽车磁流变半主动悬架系统模糊控制仿真研究
根据 牛顿 第二定 律 .建立 其运动 微分 方程 为 :
『 = z )C — 2 同 ) m 一 2 ) 一 + I 1 ( — 1 k(lx -  ̄l ) ) , = 1d ) 2 - g c - 一 n - x 2
根 据式 1 、式 2 ,可得到 :
c=
周 玉丰 , 龙 . 车 磁 流 变 半 主 动悬 架 系统 模 糊 控 制 仿 真 研 究 [. 国农 机 化 , 0 2 ()19 1217 吴 汽 J 中 】 2 1,3: 4 — 5 , 5
Z OU Y —eg wU Ln . i lt ns d nfz o t l f e iem g e —elg a sm - ci upninss m [. H u fn , o g S muao t yo z cnr hc an t ro i l e iat esse s yt J i u uy oov l o oc v o e 】
“ ) — 活 塞与缸 体 间 的相 对 流速 ; —
— —
流 体 的动力 粘度 :
线 圈 匝数 : 输 入 电流 :
Ⅳ 一 , _
架 系 统模 糊 控 制 器 的设 计 与 动 态 仿 真 对 改 进 悬 架 系 统设 计 .提 高 汽 车行 驶 的平 顺 性 和 安 全 性 有 着 重 要
架 系 统可视 为 磁流变 被动 悬架 系统 .其运 动微 分方 程
同式 3
3 模 糊 控 制器 的设 计
31 模 糊 控 制 器 设 计 .
模 糊控 制 器【 以模糊 条 件语 句 描 述 的语 言控 制 7 】 是 规则 为 基础 .它 的控制规 则是 通过 人为经 验 总结 出来 的 ,输 入变量 一般有 两个 .输 出变量一般选 控制量 。 本模 糊控 制半 主动 悬架 系统 是 以悬 架 系统 非簧 载 质 镀 和簧 载 质量 的相 对位 移 ( , 其 变化 率 ( 一 X 1及 2 : 33 比例 因子 及隶 属 函数 的选 择 . 模 糊化前 先将 各变量 规范 化 .规范 化 的过程 即论 域变 化 的过 程 ,实 际 变量 e c 与规 范 化 后 的 变 、e 、
半主动悬架车辆的整车模糊控制仿真研究
( 1 )
1 整 车模 型 的 建 立
车辆 悬架 动力 学模 型 的建 立是 汽 车性能 分析 的 基础 , 而整车模 型 能完整 地 表现 出垂 直运 动 、 侧倾 和
俯仰 运 动 。为 此 , 采 用 整 车 模 型 进 行 控 制 分 析 。由
根 据 牛顿第 二定律 , 整 车 的动力 学方程 为 :
Z b为 车 身 质 心 垂 直位 移 ; 0为 簧 载 质 量 侧 倾 角 位 移 ; 为簧 载 质 量 俯 仰角位移 ; z f ( f 一1 , 2 , 3 , 4 ) 为 非 簧 载 质 量 的垂 直振动位移 z i ( f
=5 , 6 , 7 , 8 ) 为 簧 载 质量 4个 端 点 的 位 移 ; Z O i ( i =1 , 2 , 3 , 4 ) 为 路 面 激
仿真 分 析 都是 针 对 1 / 4车辆 模 型 或 1 / 2车 辆 模 型 ,
而结 合模糊 控 制理 论对 整 车模 型 的控制 研究 相对较 少 。该 文 以整 车模 型 为对 象 进 行 动 力 学 分 析 , 在 此
基 础上 提 出整车模 糊 控 制 方 法 , 对 磁 流变 半 主动 悬
存在 的非 线性 因素难 以建立 精确 的数 学模 型 。模糊
控制 是一 种不 依赖 于系 统 的 精 确 数 学模 型 , 适 合 于 非线 性 时变和 滞后 系统 的控 制 , 其 控 制 规 则 不 受任 何 限制 , 有很 大 的通 用性 。 因此 , 采 用模 糊控 制方法 研究 磁 流变半 主动 悬架 控 制 问题 已成 为学者 们研 究 的热点 。例如 : 董 小 闵 等采 用 自适 应 模 糊 控 制 方 法 对 1 / 4 磁 流 变半 主动悬 架 车辆设 计 控制 器并 进行 了 仿真, 分 析表 明 自适 应模 糊 控制 方法 优 于天 棚控 制 ; 李锐 等通 过对 磁 流变 减 振 器 特 性 的 分 析 , 提 出 了含 有控 制级 和协 调级 的分 级 模 糊 控 制 系 统 , 试 验 表 明 该 系统 能有效 提高 汽 车 的舒 适性 。但现 有 的研究 或
汽车半主动悬架的模糊PID控制仿真研究
半主动悬架更好地发挥作用 。
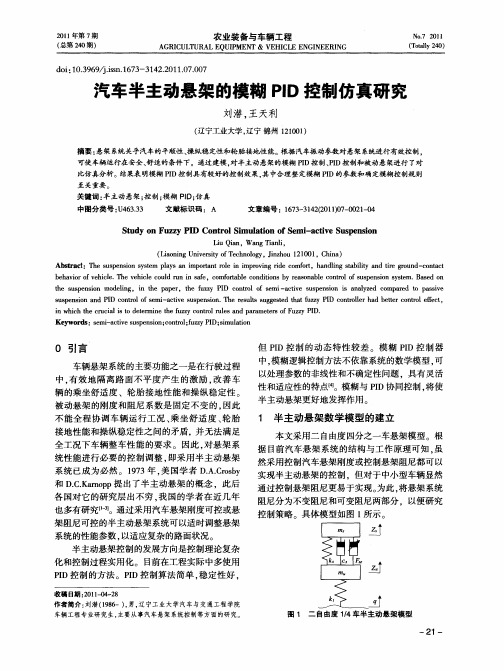
1 半主动悬架数 学模 型的建立
本文采用二 自由度四分之一车悬架模型 。根
据 目前汽车悬架 系统 的结构与工作 原理可知 , 虽 然采用控制汽车悬架刚度或控制悬架阻尼都可以
2 1 年第 7 01 期 ( 总第 2 0 ) 4期
农 业装 备 与车辆 工 程
A R C L U A Q IME T&V HIL N IE R N G IU T R LE UP N E C EE GN E I G
No7 0 l . 2 1
(oal 4 ) T tl 2 y0
S u y o u z D n r lS m u a i n o e - c i e S s e so t d n F z y PI Co t o i l t fS mi a tv u p n i n o
LuQa , n in , i i WagTal n i ( i nn nvr t o eh ooy J zo 2 0 1 C ia La igU i sy f c nlg , i hu 110 , hn ) o e i T n
d i1 . 6 /.s. 7 — 1 22 1 .7 0 o -03 9j s 1 3 3 4 .0 1 . 7 9 in 6 0 0
汽车半主动悬架的模糊 PD控制仿真研究 I
刘潜 , 王天利
( 宁工业大学 , 辽 辽宁 锦州 1 10 ) 20 1 摘要 : 悬架系统关乎汽车的平顺性 、 操纵稳 定I和轮胎接 地性能。根据汽车振动参数 对悬架 系统进行有效控制 . l 生
系 统 已成 为 必 然 。 17 9 3年 , 国 学 者 DACob 美 ..rsy
但 PD控制 的动态特性 较差 。模糊 PD控 制器 I I 中, 模糊逻辑控制方法不依靠系统的数学模型 , 可 以处 理 参数 的非 线 性 和不确 定 性 问题 。具有 灵 活
基于MATLAB的车辆半主动控制的仿真研究
道横 向不 平顺输 入 向量 。
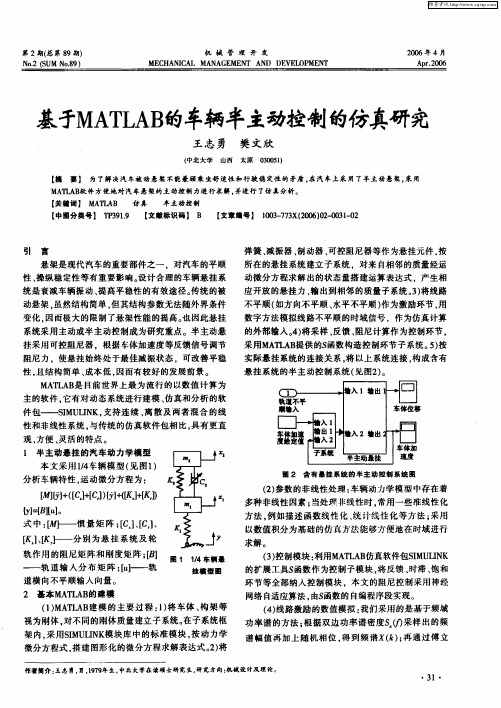
2 基本 M T A 的建 模 ALB
f) A L B 1M T A 建模的主要过程 :) 1将车体 、 构架等 视为刚体 . 对不同的刚体质量建立子系统。 在子系统框 架内。 采用SM LN 模块库 中的标准模块 , I U IK 按动力学 微分方 程式 . 建 图形 化 的微分方 程 求解表 达式 。) 搭 2将
求解。
( ) 制模块 : 用MA L B 3控 利 T A 仿真软件包 SM LN I U IK
—
轨作用的阻尼矩阵和刚度矩阵 ; 1 【 8 轨 道输入分布矩 阵 ; 卜 [ Ⅱ 轨
—
的扩展 工具I s 函数 作为控 制子 模块 , 反馈 、 将 时滞 、 和 饱 环 节等 全部 纳入 控制模 块 ,本 文 的阻尼控 制采 用神 经 网络 自适应 算法 。 函数 的 自编程 序段实现 。 由S () 4 线路 激励 的数 值模 拟 : 我们采 用 的是 基 于频域
再通过傅立基于matlab的车辆半主动控制的仿真研究中北大学山西太原030051为了解决汽车被动悬架不能兼顾乘坐舒适性和行驶稳定性的矛盾在汽车上采用了半主动悬架采用matlab软件方便地对汽车悬架的主动控制力进行求解并进行了仿真分析
维普资讯
第 2期 ( 第 8 总 9期)
圈 2 含 有 悬挂 系统 的半 主 动 控 制 系 统 圈
【 + 【J 【, Il( + l Il( 】 C】 夕+【 【, c+ l ) 】 K】 ) l= 【 。 y 旧 “ } 】 式 中: _ 惯量矩 阵 ; , 【, 【 一 嗍卜 【 】 C】 C 、 、 【, , K】 卜 、 分 别为悬 挂系统及轮
功率谱 的方法; 根据双边功率谱密度S∽ 采样 出的频
基于最优控制和模糊控制的半主动悬架仿真研究
Si mu l a t i o n St u d y o f Se mi - Ac t i v e Su s p e n s i o n B a s e d o n Op t i ma l Co n t r o l a n d Fu z z y L o g i c Co n t r o l
GU H a i - m i n g , Z H AO G u i - f a n , Y A N G J i a - l i n , C AO J i a n - x i a o , Q I N G K e
( 1 . C o l l e g e o f Au t o mo b i l e En g i n e e r i n g ,Ha r b i n I n s t i t u t e o f T e c h n o l o g y ,S h a n d o n g We i h a i 2 42 6 0 9 ,Ch i n a ;
第 6期 2 0 1 3年 6月
机 械 设 计 与 制 造
Ma c h i n e r y De s i g n & Ma n u f a c t u r e
基 于最优控制和模 糊控 制 的半主动 悬架仿 真研 究
顾海明 , 赵桂 范 , 杨佳鳞 , 曹建骁 , 青 坷
t i m e, cc a o r d i n g t o l i n e a r q u a d r ti a c g a u s s i a n s t o c h a s t i c o p t i ma l c o n t r o l t h e o r y a n d f u z z y l o g i c c o n t r o l t h e o y, r a L Q G o p t i m a l c o n t r o l l e r a n d a f u z z y l o g i c c o n t r o l l e r w i t h t w o i n p u t s a n d o n e o u t p u t re a es d i g n e d . R o d a i n p u t m o d e l , p a s s i v e s s u p e n s i o n s y s t e m,o p t i m a l c o n t r o l s y s t e m a n d f u z z y l o g i c c o n t r o l s y s t e m a r e e s t a b l s i h e d i n M A T L A B / S I MU L I N K a n d s i m u l a t i o n t e s t o u t p u t i s a p p l  ̄ d t o a n a l y z e t h e e f e c t o n b o d y cc a e l e r a t i o n , s sp u e si n o n d e le f c t o i n a n d t i r e d y n a m i c l o d. a T h e r e s u l t s h o w s t h a t t h e t w o c o n t r o l s t r t a e g i e s C n a b o t h i m p r o v e c a r i r d e c o m f o r t . F i n a l l y , b o t h t h e dv a nt a a g e s a n d d s i dv a nt a a g e s ft o h e t w o c o n t r o l
《连续可调阻尼减振器设计与半主动悬架的控制算法仿真》范文
《连续可调阻尼减振器设计与半主动悬架的控制算法仿真》篇一一、引言随着汽车工业的快速发展,车辆乘坐的舒适性和行驶的稳定性越来越受到人们的关注。
连续可调阻尼减振器作为一种新型的减振技术,在提高车辆悬挂系统的性能方面具有显著的优势。
本文将详细介绍连续可调阻尼减振器的设计原理,并探讨其与半主动悬架控制算法的仿真研究。
二、连续可调阻尼减振器设计2.1 设计原理连续可调阻尼减振器是一种能够根据车辆行驶状态实时调整阻尼力的减振器。
其设计原理主要是通过改变阻尼液的流动通道、阀门的开启程度以及电磁场的强度等,实现对阻尼力的连续调节。
2.2 设计流程设计连续可调阻尼减振器需要经过以下步骤:确定设计要求、选择合适的材料和结构、建立数学模型、进行仿真分析、实验验证及优化。
在设计中,需要充分考虑减振器的耐久性、可靠性、成本以及与半主动悬架的匹配性。
2.3 关键技术连续可调阻尼减振器的设计关键在于阻尼力的精确控制。
这需要采用先进的传感器技术、控制算法以及执行机构。
此外,减振器的密封性能和抗腐蚀性能也是设计的关键技术。
三、半主动悬架控制算法3.1 算法原理半主动悬架是一种能够根据车辆行驶状态实时调整悬挂系统参数的悬挂系统。
其控制算法主要基于现代控制理论、优化算法以及智能算法。
通过实时采集车辆行驶状态信息,如车速、路面状况、车身姿态等,进行数据分析与处理,进而调整悬挂系统的参数,以实现最优的减振效果。
3.2 算法流程半主动悬架控制算法的流程主要包括数据采集、数据处理、决策制定和执行机构控制。
其中,数据处理是核心环节,需要通过滤波、特征提取、模式识别等技术,从海量数据中提取出有用的信息。
决策制定则需要根据提取的信息,结合优化算法和智能算法,制定出最优的控制策略。
四、仿真研究4.1 仿真环境搭建为了验证连续可调阻尼减振器与半主动悬架控制算法的匹配性和性能,我们搭建了仿真环境。
该环境包括车辆模型、路面模型、减振器模型以及半主动悬架控制算法模型。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
其中: G 。为 路 面 不 平 度 系 数 , 假设 为 B级路面 , G。 : 2 . 5 6 ×1 0 1 T I / m_ 。 ; 为 车辆 行 驶 速 度 , 此 处 设 定 车 速 一2 0 m/ s ; 选取 白噪 声 W( £ ) 的时 间 为 2 0 S ; f o为 下截 止 频 率 , 此 处 取 值 为 0 , 滤 波器 为 一 个 积 分 环 节 。在 S i mu l i n k中建立 随机 路 面输 入 的仿 真 模 型 , 如
第 4期 ( 总第 1 9 1期 )
2 0 1 5年 0 8月
机 械 工 程 与 自 动 化
ME CHANI CAL ENGI NEERI NG & AUTOM ATI ON
NO. 4 Aug.
文章 编号 : 1 6 7 2 4 — 0 0 0 5 — 0 3
操纵 稳定 性 。路 面 的不平 度是 影 响悬 架动 力 学特性 以
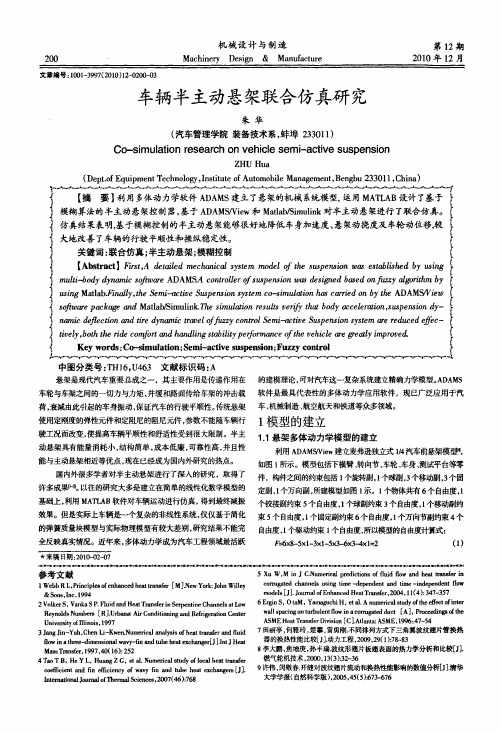
利 用 ADAMS / Vi e w 建 立麦 弗逊 式 1 / 4汽 车前 悬 架模 型 , 假 设所 有 零部 件 均为 刚体 , 各 运 动副 为刚 性连 接, 车体 与 轮胎 相 对 于 路 面 只做 垂 直 运 动 。模 型包 括 了上横 臂 、 转 向节 、 下 横臂 、 减 振器 、 车轮 、 车身 、 测 试平 台、 转 向横 拉杆 等 零件 L 4 ] , 如图 1 所 示 。构 件之 间 的约 束 包括 5个 球 副 、 3个 固定 副 、 2个 旋 转 副 、 2个 移 动 副、 1个 点面 约束 副 、 1个 万 向副 和 1个 驱 动 约 束 。计 算 得 到系 统模 型 的 自由度 数 F=2 。 对 于 2自由度 的 1 / 4汽 车 悬 架 来 说 , 由于 其求 解 简便、 计算量小, 同 时也能 反 映评 定悬 架 系统 优劣 的几
摘 要 : 对 2自 由度 的 1 / 4汽 车 悬 架 运 用 多体 动 力 学 软件 A D AM S建 立 多体 动 力 学模 型 ,用 MATL AB建 立 半 主 动 控 制 悬 架 的模 糊 控 制 器 ,运 用 AD AMS / Vi e w 和 MAT L AB / S i mu l i n k进 行 半 主 动 悬 架 的 联 合 仿 真 。仿 真 结 果 表 明 ,相 对 于被 动 悬 架 ,模 糊 控 制 的半 主 动 悬 架 能 有 效 地 降低 车 身 垂 向加 速 度 、悬 架 动 挠 度 和 车 轮 动 位 移 , 对 改 善 汽 车 的操 纵 稳 定 性 、行 驶 平 顺 性和 驾 驶 安 全 性 等 综合 性 能 都 有 着 非 常 重 要 的 意义 。 关 键 词 :半 主 动 悬 架 ;模 糊 控 制 ;A DAMS ;联 合 仿 真 中 图 分 类 号 :T P 3 9 1 . 9: U4 6 3 . 3 3 文 献 标 识 码 :A
及使车 辆产生振 动 的主要 因素 。当车速 为一 定值 时 , 速 度谱密 度为常数 , 设定时域 功率谱 为一不 随频 率变 化 的 白噪声 信号 , 对 振动 的描述 常采用 白噪声加 以模 拟 。
随 机路 面输 入 可用下 式来 表示 [ 5 ] :
,
( £ ) 一一2 7 c f o z ( ) +2 7 r JG o v w( t ).
1 悬 架 系 统 模 型 的 建 立 1 . 1 悬 架 多 体 动 力 学 模 型 的 建 立
车 轮 主销 转 向节
拉臂
图 1 1 / 4车 悬 架 多 体 动 力 学 模 型
1 . 2 随 机 路 面模 型 的 建 立 ,
评价 悬 架系 统 的性能 指标 主要 包 括乘 坐舒 适性 和
0 引 言
个 重要 指标 , 因此在 悬架 控 制研究 方 法 中被广 泛采 用 。
悬架 是 承载 式 车身 与车 轮 之 间全 部 传力 连 接装 置 的总 称 , 其作 用 是把 路 面 作 用 在 车 轮 上 的 各 种 力 和 力 矩传 递 到车 架上 用 以吸收 和缓 和行驶 中 因路 面 不平 度 引起 的车轮 跳 动而 传 给车 架 的 冲击 和振 动 j 。汽 车 悬架 系 统 对 车 辆 的操 纵 稳 定 性 、 行 驶平 顺 性 和 乘 坐舒 适性等 衡量 车辆性 能的重要 指标都 有着 决定 性 的作用 , 因此悬 架 的设 计对 车辆 的总体性能有 着很 大的影 响 。 相 对 于被 动悬 架 , 半 主动 控 制 悬 架 能 随 时 根 据 车 辆行 驶 状态 进 行 阻尼 器 阻 尼 系 数 的调 节 , 使 车 辆 行 驶 更加 平 顺 , 乘 坐更 加 舒 适 , 而 消 耗 不 大 的能 量 , 因此 半 主 动 控 制 悬 架 在 未 来 应 用 广 泛 。 通 过 ADAMS / C o n t r o l 模 块 与 MATL AB的 接 口可 实 现 基 于 汽 车 半 主 动控 制悬 架 的联 合 仿 真 , 此 方 法 解 决 了半 主 动 控 制 悬 架数 学模 型 建立 的难 题 , 减 少 了 物理 样 机 测 试 环 节 的试 制 和试 验 的次 数 , 为 车辆 动 力 学 系统 的仿 真 与 分 析 提供 了一种 有效 方 法l 3 ] 。
汽 车半 主 动控 制 悬 架 的仿 真 研 究 米
姜 钊 ,杨 晓 ,李耀 刚 ,龙 海 洋 ,张 文 明
( 1 . 河北联合 大学 机械_ T - 程 学 院 , 河北 唐 山 0 6 3 0 0 9 ;2 . 北 京 科 技 大 学 土 木 与环 境 工 程 学 院 , 北 京 1 0 0 0 8 3 )