西门子系统参数的意义
西门子S7-300形参与实参

我爱自动化
will666
侠士
经验值: 1389
发帖数: 926
精华帖: 5
主题:回复:什么叫实参什么叫形参
2010-11-04 21:16:34 4楼
比如你编写了一个块,有两个输入a,b,一个输出c,然后程序里面做加法c=a+b。这个abc就是形参,没有调用之前他们是不存在的。然后你调用这个快,在输入引脚使用了A,B,输出引脚使用了C,那么ABC就是实参,他们是实实在在有值的。
比喻的太形象了,很生动!建议加精!
智慧人生 品味舍得
300小小生
侠客
经验值: 831
发帖数: 626
精华帖: 1
主题:回复:什么叫实参什么叫形参
2010-11-20 14:18:17 21楼
呵呵,论坛里的高手就是多,可以把书本里的知识点比喻的这么生动。结合STEP7里具体点说可以是,假如我们有1个功能块FB1,功能FC1,几个FB1的背景数据块。在FB1里写公式 a+b+c,这里a,b,c就是形参。而在FC1里我们定义在I0.0=1时调用FB1,并令a=1,b=2,c=3.此时1,2,3就是实参。而定在I0.1=1时调用FB1,令a=10,b=20,c=30,此时10,20,30也是实参。建议楼主可以找个实例程序看看就很明白了
发帖数: 3984
精华帖: 18
主题:回复:什么叫实参什么叫形参
2010-11-15 13:57:45 14楼
举例说明:
例:
3X + 2Y =5Z
当X=48,Y=22,求Z?
其中X,Y,Z就是形参。48,22就是实参。
一日三省吾身
【西门子】SINUMERIK 808D 参数手册

【西门子】SINUMERIK 808D 参数手册简介SINUMERIK 808D 是西门子公司开发的一种先进的数控系统,旨在为机床制造商和操作员提供高效可靠的控制解决方案。
本文档将详细介绍SINUMERIK 808D的参数和参数设置方法,以帮助用户更好地理解和使用该系统。
参数介绍SINUMERIK 808D的参数可以根据不同的应用场景进行设置,以满足用户的具体需求。
参数主要分为两类:1.系统参数:用于配置系统的基本设置,包括系统语言、显示屏亮度、通信接口等。
这些参数的设置对整个系统的运行起到重要作用,用户需要根据实际情况进行相应设置。
2.功能参数:用于配置具体的功能模块,例如轴控制、进给控制、夹具控制等。
这些参数的设置与具体的机床功能有关,用户需要根据机床的特点进行相应设置。
参数设置方法1. 进入参数设置界面在SINUMERIK 808D的操作界面上,点击菜单栏中的“参数设置”选项,即可进入参数设置界面。
2. 选择要设置的参数在参数设置界面中,可根据需要选择要设置的参数。
用户可以通过浏览参数列表、输入关键词或使用快捷键来快速定位需要设置的参数。
3. 设置参数值选中要设置的参数后,用户可以在参数设置界面中对其进行相关设置。
设置方法包括手动输入参数值、选择预设选项或通过其他方式进行设置。
4. 保存参数设置设置完成后,用户需要点击界面上的“保存”按钮,将设置的参数值保存至系统中。
在保存参数过程中,系统会进行相应的参数校验和冲突检测,确保参数的合法性和有效性。
5. 导出参数设置如果用户需要将参数设置保存到外部设备或进行备份,可以通过导出功能将设置的参数保存为文本文件。
用户可以选择导出所有参数或仅导出部分参数,以便于以后恢复或共享。
参数值的意义对于不熟悉SINUMERIK 808D系统的用户来说,参数值往往具有一定的技术含义。
下面介绍一些常见参数的意义和设置建议:1.通信接口设置:该参数用于配置系统与外部设备的通信接口方式,包括以太网、串口、USB等。
西门子Dsl数控系统OPCUA的配置与应用

OPCUA技术的挑战与机遇
挑战:需要解决数据传输的安全性 问题
机遇:OPCUA技术可以应用于更 多的工业领域,提高生产效率
添加标题
添加标题
添加标题
添加标题
挑战:需要提高数据传输的效率和 稳定性
机遇:OPCUA技术可以促进工业 4.0的发展,实现智能制造
感谢您的观看
汇报人:abc
OPCUA服务器的配置
安装OPCUA服 务器:下载并安 装OPCUA服务 器软件
配置OPCUA服 务器:设置服务 器名称、IP地址、 端口号等参数
添加设备:将西 门子Dsl数控系 统添加到 OPCUA服务器 中
测试连接:测试 OPCUA服务器 与西门子Dsl数 控系统的连接是 否正常
OPCUA客户端的配置
解决方案:采用西 门子Dsl数控系统 OPCUA,实现远 程监控和故障诊断
应用效果:提高了 生产效率,降低了 维护成本,提高了 产品质量
西门子Dsl数控系 统OPCUA的未来 发展
OPCUA技术的发展趋势
跨平台兼容性: 支持多种操作 系统和硬件平
台
安全性提升: 加强数据加密 和身份验证, 提高系统安全
西门子Dsl数控系 统OPCUA的应用
OPCUA在数控加工中的应用
实时监控:通过OPCUA接口,可以实时监控数控加工设备的运行状态和加工进度。
数据采集:OPCUA接口可以采集数控加工设备的各种数据,如加工时间、加工速度、 加工精度等。
远程控制:通过OPCUA接口,可以实现对数控加工设备的远程控制,如启动、停止、调 整加工参数等。
案例二:某航空制造企业的应用案例
企业背景:某航空制造企业,主要生产飞机零部件 应用需求:需要实现数控系统的远程监控和故障诊断 解决方案:采用西门子Dsl数控系统OPCUA进行远程监控和故障诊断 实施效果:提高了生产效率,降低了维护成本,提高了产品质量
西门子D数控系统的参数设定

西门子840D数控系统的参数设定摘要本文主要针对以西门子840D为控制乐境的数控机床,对算机床数据的调整进行了分析,同时对机床限住的设定与驱神的配王进行了论述;关键词保护级别有效方式设定配置l 概述随着电站经济的飞跃发展,对电站产品的加工设备的要求越来越高,对机械加工的要求也越来越高,如高低压加热器的管板,冷凝器的隔板等加工,这些都必须用数控机床来完成;我国在80年代初进口了许多数控机床,其采用的数控系统十分多样化,其中西门子840D数控系统由于其强大的功能,优越的性能,已越来越被广大厂商的各种数控机床所采用,但西门子公司所提供的标准数据并不一定完全适合机床,因些很有必要进行参数的设定与调整;2 相关问题在对机床参数进行调整前,有两个与数据调整有关的问题需要特别注意的:西门子数据的保护级别和数据写入有效的方式;2.1 数据的保护级别西门子共设有7个等级的数据保护级别见表1,级别0是最高的而级别7是最低的,高级别向下兼容低级别;在修改数据的时候,若设定的Password级别不够高,将无法修改某些特定的机床参数;具体修改密码的方法是在操作面板OP上依次按如下的软2.2 数据有效的方式数据修改后并不全是简单的就能有效,840D数控系统提供了多种数据有效的方式,而具体采用哪种方式又取决于所修改数据的参数类型;数据的类型及其生效的方式共有如下几种:1POWER ONof生效方式是按操作2NEW-CONFcf生效方式是按操作面板的或者按机床控制面3RESETre按机床控制面板上的l 键生效4II~ F_,DLt,TEs0数据输人后即可生效3 参数的设定与调整西门子840D数控的控制系统参数是由机床数据MD与设定数据sD组成,机床数据与设定数据的数据范围及其定义见表2所示;由表2中可以看出,机床数据MD主要由通用,特别通道,特别轴等机床数据构成;设定数据sD由通用,特别轴,特别通道设定数据组成;西门子840D数控数据的调整就是对通用数据,通道数据,轴数据和设定数据的调整;现在就对通用机床数据,特别通道机床数据和特别轴机床数据中要设定调整的数据进行分析;3.1 设定通用机床数据MD1000 用于定义轴名称MD10050 定义基本时间;位控;插补时间均是以此为基础MD10060 位控时间系数MD1O070 插补时间系数MD10200 内部计算精度对直线轴,缺省值为小数点后3位MD10210 内部计算精度对旋转轴,缺省值为小数点后3位在此需注意的是:MD18D0后面的通用机床数据;对它们修改时,会引起DRAM区的重新分配,造成数据的丢失;因此在对此类数据修改完成后,要先进行“Atvhive”存档,存档之后再取出,系统会自动进行数据分配;3.2 设定特别通道机床数据MD20050 定义通道中几何轴的数量MIV20060 定义通道中几何轴的名称MD2D70 定义通道中机械轴的数量MD20080 定义通道中机械轴的名称MD207IO 设为1,NC启动时需回参考点;设为0,则不需要在对MIY20OS0设置时,参数名称的前缀定要与MD10300数据的前缀保持一致,而后缀可以不一样,如X+X1;3.3 设定特别轴机床数据MD30130 定义值输出的类型;设成“0”为模拟输出,“1”为指令输出MD30240 设定测量系统的类型; 0’为无测量系统;“1”为增量测量系统; 2为绝对测量系统MD3030O 定义直线轴脯转轴;“0”为直线轴,“1”为旋转轴MD31010 设定光栅尺的栅距,该值要与实际栅距相符MD31040 定义编码器是否直接测量;“0”为否,“1 为是MD32000 设定轴的最大速度MD36200 设定轴的最大上限速度,应大于MD320D的设定MD36020 设定轴监控的精停延时值4 软硬限位的设定在西门子840D数控系统中共为用户提供了四个与机床软限位有关的参数,它们分别为:MD36100 第一负软限位MD36120 第二负软限位MD36110 第一正软限位MD36130 第二正软限位这四个软限位所设定的数值与机床硬限位位置之间的关系如图1所示;从图中可以看出,第一,第二正负限位所设定的数值都应在正负方向硬限位的位置之问,而第二软限位的取值在第一正负软限位的数值之间;在第一与第二软限位的取值中只能一个有效;而且在完成对软限位的数值设定后,机床必须回参考点以后才能使设定有效;5 驱动的配置在对特别轴机床数据进行设定调整的同时,还需要对轴的驱动进行配置;具体步骤如下:1将NCU上的s3开关拨至 1档一NCK RESET,清空Nc一再将s3开关拨至 0档,调出标准的机床数据2设置等级保护密码为:Sunrise3依次按如下软键分别在X;Y界面下修改30130= 1;302400= 1一NCK Reset6 结束语以上只是对840D数控系统的众多参数中几个重要的数据设定诃整进行了简单的分析,以及对软硬限位的设定和驱动的配置进行了讨论;对西门子840D数控参数的调整过程就是将840D数控系统与机床紧密相结合的过程,在实际工作时必须结合机床的具体情况,具体线路,才能真正做到切实有效;。
西门子Process Historian和Information Serve在船闸集控系统中的应用
西门子Process Historian和Information Serve在船闸集控系统中的应用1. 引言1.1 背景介绍船闸集控系统是指用于控制船闸操作的自动化系统,其在船舶过闸、水位控制、闸门控制等方面起着至关重要的作用。
随着科技的不断发展,现代船闸集控系统已经逐渐智能化,采用了先进的技术来提高系统的效率和可靠性。
西门子Process Historian是一款用于数据存储和分析的软件系统,它可以实时记录和存储系统运行数据,并提供数据分析和报告功能。
在船闸集控系统中,Process Historian可以帮助操作人员追踪系统运行状态、优化运行参数,并提供历史数据用于系统故障分析和优化。
Information Serve是西门子公司提供的用于数据发布和共享的软件系统,它可以将系统数据以图形化、直观化的方式展示给用户,帮助用户更好地理解系统运行情况。
在船闸集控系统中,Information Serve可以实现数据实时监控、远程控制和故障诊断,提高系统运行的透明度和可靠性。
【以上内容为虚构】1.2 技术概述西门子Process Historian和Information Serve是西门子公司针对工业领域开发的两款重要软件产品。
Process Historian是一种用于数据采集、存储和查询的历史数据库系统,可帮助用户轻松地记录和分析实时生产过程中的数据。
Information Serve是一种用于数据展示和分析的软件系统,能够将历史数据以直观的图形方式展示给用户,并提供多种查询和分析功能。
这两款软件产品在船闸集控系统中的应用具有重要意义。
船闸集控系统是一种用于控制船闸开启、关闭和水位控制的自动化系统,其中涉及到大量的数据采集和处理工作。
通过使用Process Historian,系统可以实时采集和存储各种传感器数据,包括船闸位置、水位、压力等信息,为后续的分析和查询提供了基础数据支持。
Information Serve可以帮助系统管理人员通过直观的图表和报表展示历史数据,帮助他们更好地了解船闸运行状态,及时发现问题并采取措施解决,提高系统的安全性和稳定性。
西门子802D系统的初始化
西门子802D系统初始 化和PLC调试实训
一、实验目的
1、掌握SINUMERIK 802D系统的初始化。 2、掌握SINUMERIK 802D系统的基本车床 数据设定。 3、掌握PLC标准程序的上传和下载。
二、实验设备
1、RS-SY-802D数控机床综合实验系统。 2、计算机 3、RS232 通讯电缆
五、实验步骤
1、TOOL BOX光盘安装 TOOL BOX光盘是调试数控系统所用调 试工具软件及相关数据包,其中包含 WINPCIN串行通讯软件、Toolbox 802D调 试数据包、Programming Tool PLC802内 嵌型S7-200 PLC编程调试工具软件、PLC 802D Library标准PLC程序、SimoComU伺 服驱动611U调试诊断工具软件、Adobe Acrobat Reader资料文件阅读软件。
步骤五:在机床端“确认”。传输完成后, 系统重新上电,启动完成后将出现车床画 面,初始化成功。
3、西门子802D系统车床标准PLC程序的上传。
步骤一:电脑端,打开“PLC802 Library”, 选择“Sample Turn Machine”。
步骤三:工具→选项→语言,选择“中文”
步骤四:选择“SIMATIC LAD”,查找并修改梯形图。
USER_DATA_HEX PLC机床参数-十六进制数 bit4
手 动键 保持 方式 带制动装置 的坐标轴 Z轴 Y轴
bit3 带有 倍率 开关
bit2 外部 停止 信号
bit1 使能 自动 取消
bit0 调试 过程 中
14512[16]
返回参考电时倍率开关对下列轴无效 X轴 4th 轴 Z轴 Y轴 X轴
西门子440变频器参数的说明
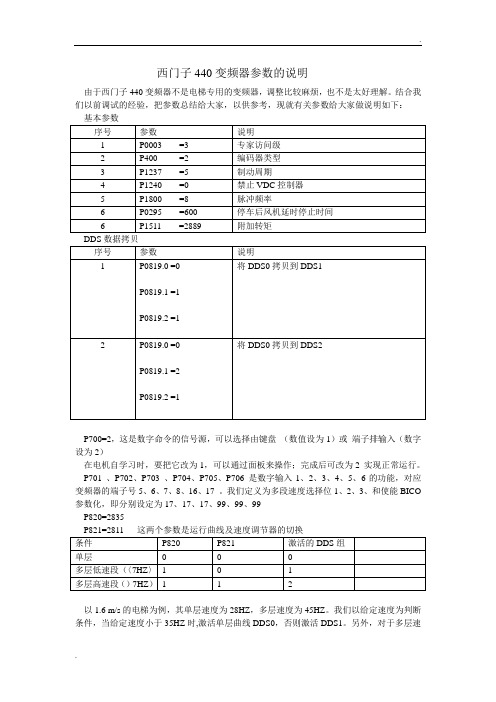
西门子440变频器参数的说明由于西门子440变频器不是电梯专用的变频器,调整比较麻烦,也不是太好理解。
结合我们以前调试的经验,把参数总结给大家,以供参考,现就有关参数给大家做说明如下:P700=2,这是数字命令的信号源,可以选择由键盘 (数值设为1)或 端子排输入(数字设为2)在电机自学习时,要把它改为1,可以通过面板来操作;完成后可改为2 实现正常运行。
P701 、P702、P703 、P704、P705、P706 是数字输入1、2、3、4、5、6的功能,对应变频器的端子号5、6、7、8、16、17 。
我们定义为多段速度选择位1、2、3、和使能BICO 参数化,即分别设定为17、17、17、99、99、99 P820=2835以1.6 m/s 的电梯为例,其单层速度为28HZ ,多层速度为45HZ 。
我们以给定速度为判断条件,当给定速度小于35HZ 时,激活单层曲线DDS0,否则激活DDS1。
另外,对于多层速度,我们对速度调节器的增益系数和积分时间常数做了一下切换,当实际速度小于7HZ时,激活DDS1,当实际速度大于7HZ时,激活DDS2,P2890=70%P2885=1024(r1024是实际的固定频率)P2885 是比较器1(说明书10-212页),当r1024大于或等于P2889时r2886=1; 当r1024小于P2889时r2886=0;要激活P2885 需要P2800=1 P2802[12]=1,比较的结果是r2886,我们把比较结果设在P2834(D—FF1即D-触发器1)中,P2834[0]=2886:0,置位P2834[1]=0:0,D-输入P2834[2]=0:0,存储脉冲P2834[3]=2813:0,复位D-触发器1有两个结果,r2835和r2836,而我们设定P820=2835,就选择DDS1。
而D-触发器1的激活级是P2801[12],故我们设定P2801[12]=3(优先级)而当P821=2811=1时,则选择DDS2,其中用到的参数有r53.2 p1080变频器的实际频率是否大于或等于P1080如果是则是1,如果不是则是0;其结果由p2828(NOT1)转换后由r2829 输出,p2801[9]是p2828的激活级;而r2829又和r2835通过p2812(AND2)与后由r2813输出结果,p2812p2801[1]又是p2812的激活级r2813r53.4p2155变频器的实际频率是否大于P2155如果是则是1,如果不是则是0,这个结果又通过p2810(AND1)由2811输出p2801[0]是2810的激活级r2811P2828=53:2P840=722:3=数字输入4,(要求P704 设定为99,BICO)正向运行的ON/OFF命令P842=722:4=数字输入5,(要求P705 设定为99,BICO)反向运行的ON/OFF命令这两个参数的社的设定只有在P719=0时才能激活。
西门子数控系统的参数使用
作者: 谢星昊
作者机构: 洛阳轴承控股有限公司风力发电轴承制造部设备科,河南洛阳市洛龙区张衡街科技园1号471023
出版物刊名: 设备管理与维修
页码: 69-69页
年卷期: 2012年 第7期
主题词: 数控系统 西门子 SINUMERIK840D 数控机床 组成部分 维护过程 参数类型 驱动参数
摘要:参数是数控系统的重要组成部分,在数控机床维护过程中经常涉及参数的使用,通过修改参数可实现机床某些功能,灵活方便、省时省力。
西门子数控系统参数类型:①通用参数(数据号10000-19600);②通道参数(数据号20000~29000);③轴参数(数据号30100~39600);④驱动参数(数据号1000~1799);⑤显示和保护参数(数据号9000~9999)。
下面介绍SINUMERIK802D-SL和SINUMERIK840D系统参数的使用。
对西门子PLC的PID参数整定问题分析

120研究与探索Research and Exploration ·工艺与技术中国设备工程 2017.01 (上)结合我国目前实际情况可知,PID 控制器已经在工业控制领域得到了较为广泛的应用。
与其他控制器相比,PID 控制器具有明显的计算量少、结构经典、便于参数调整等优势。
作为PID 控制的关键,其参数整定问题直接影响PID 控制的控制质量。
因此,分析西门子PLC 的PLD 参数整定问题具有一定的现实意义。
1 西门子PID 基本控制原理西门子PID 控制器的控制原理为:参照系统误差,借助PID 参数完成控制量的计算,最终实现控制功能。
具体而言,输入通过微分(D)、比例(P)以及积分(I)获得输出结果,并将输出结果传递至执行机构,由执行机构负责对某一规定对象执行控制任务。
从西门子PID 的构成来看,其中,微分部分的作用主要是提供盘查信号的变化速率,监测偏差信号的变化状况,识别偏差信号超出正常范围的征兆,准确于偏差信号由正常值转为太大之前,引入一个有效的早期修正信号,缩短系统调节时间。
而比例部分的作用则是即时完成控制系统偏差信号的反应(呈比例)。
当偏差产生后,调节器将会立即进行动作,抑制偏差控制功能的发挥。
此外,在西门子PID 控制器中,积分部分的作用以提升系统无差度以及消除静差为主。
积分的作用有效性与积分时间常数呈负相关关系,即随着积分时间常数的不断减小,积分的消除静差作用将发挥得越来越明显。
2 西门子PLC 的PID 参数整定这里主要从以下几方面入手,对西门子PLC 的PID 参数整定进行分析和研究。
2.1 模拟量闭环控制器控制系统方面在实际运用过程中,PID 模拟量闭环控制器控制系统可产生良好的自动控制功能,其自动控制原理为:当控制系统的设定值高于反馈值参数时,系统开始产生误差,误差被输入至PID 调节器中,由调节器完成微分、比例以及积分的运算,最终得出控制信号计算结果,并将该结果输出出来,传输至执行机构中。
西门子SINUMERIK840D数控系统中R参数在曲线加工中的应用
.o . o . o . o . o .o . o . o .o .o . o . o . o . o .o .o . o . o . o . o .o . o . o . o . o .. .o . o . o . o . o .o . o . o . o . o . o . o . o . o . o .o .o . o .o . o . o . o . o . o .o . o . o . o . o . o
2 关键词: 参数编程; R参数; 曲线加工; 等间距法 ;
;A sat r r mn i r ers kdoav c o amn t d hh ed y i bt c o a i wh p a t 口 i a ep g m i m h i o r r :P g m g tR a m ei n f d n d r r g o w c if eb e s 3S U E I N ye.Te hrtic p gamn i r t 0 dcs dt p-; I M RKC Cst h c aes r m i wtp a et¥ iue a a l N sm a crt o o if r g h a m r  ̄ s sd n h p i e O e
( ol eo c aia & Eet nc l n ier g az o nv f e h, am o 3 0 0 hn ) l g f C e Me hncl lc o ia E g ei ,L n huU i c . L rh u7 0 5 ,C ia r n n .o T ( h eo dC nt ci o p n f e o C roai f hn ,L n hu7 0 6 ,C ia eS cn o s u t nC m a yo t l op rt no ia a z o 3 0 0 hn ) T r o P r o C
西门子变频器参数说明

西门子变频器调试参数综合版2009-06-12 11:411 西门子变频器调试参数综合版 6SE70调试基本参数设置恢复缺省设置P053=6 允许参数存取6:允许通过PMU和串行接口OP1S变更参数P060=2 固定设置菜单P366=0 0:具有PMU的标准设置1:具有OP1S的标准设置P970=0 参数复位参数设置 P060=5 系统设置菜单P071= 装置输入电压P095=10 异步/同步电机,国际标准P100= 1:V/f控制3:无测速机的速度控制4:有测速机的速度控制5:转矩控制P101= 电机额定电压P102= 电机额定电流P103= 电机励磁电流,如果此值未知,设P103=0当离开系统设置,此值自动计算。
P104= 电机额定功率因数P108= 电机额定转速P109= 电机级对数P113= 电机额定转矩P114=3 3:高强度冲击系统(在:P100=3,4,5时设置)P115=1 计算电机模型参数值P350-P354设定到额定值P130= 10:无脉冲编码器11:脉冲编码器P151= 脉冲编码器每转的脉冲数P330= 0:线性(恒转矩)1:抛物线特性(风机/泵)P384.02= 电机负载限制P452= % 正向旋转时的最大频率或速度P453= % 反向旋转时的最大频率或速度数值参考P352和P353P060=1 回到参数菜单P128= 最大输出电流P462= 上升时间P464= 下降时间P115=2 静止状态电机辩识(按下P键后,20S之内合闸)P115=4 电机模型空载测量(按下P键后,20S之内合闸)6SE70 变频装置调试步骤一.内控参数设定1.1 出厂参数设定P053=7 允许CBP+PMU+PC 机修改参数P60=2 固定设置,参数恢复到缺省P366=0 PMU 控制P970=0 启动参数复位执行参数出厂设置,只是对变频器的设定与命令源进行设定,P366 参数选择不同,变频器的设定和命令源可以来自端子,OP1S,PMU。
西门子840d数控系统各指令

西门子840d数控系统各指令
组2 G-功能 G G 功能(准备功能)仅为整数, G... G 功能划分在G 功能组中。一个程序段中只已事先定义 能有一个G 功能组中的一个G 功能指令。 G 功能可以是模态的(直到被同组中其他功能 替代),或者是非模态的(只在写入的程序段 中有效)。 G0 带快速移动的直线插补(快速移动)运动 指令 G0 X... Z... m 1 G11 带进给率的直线插补(直线插补)G1 X... Z... F... m 1 G2 顺时针圆弧插补G2 X... Z... I... K... F... ;圆心和终点 m1 G2 X... Z... CR=... F... ;半径和终点 G2 AR=... I... K... F... ;张角和圆心 G2 AR=... X... Z... F... ;张角和终点 G3 逆时针圆弧插补G3 ... ;其他同G2 m 1 G4 事先定义的停留时间特殊运动 G4 F... ;以s 表示的停留时 间,或者 s2 G4 S... ; 以主轴旋转表示的 停留时间 ;独立程序段 G5 斜向切入式磨削斜向切入式 s 2 G7 斜向切入式磨削时的补偿运动初始位置 s 2 G9 准确停 – 减速s 11 G171 选择工件平面X/Y 进给方向Z m 6 G18 选择工件平面Z/X 进给方向Y m 6 G19 选择工件平面Y/Z 进给方向X m 6 G25 工作区域下限通道轴赋值G25 X.. Y.. Z.. ; 独立程序段 s3 G26 工作区域上限G26 X.. Y.. Z.. ; 独立程序段 s3 G33 恒螺距的螺纹插补0.001, ..., 2000.00 mm/U 运动指令G33 Z... K... SF=... ;圆柱形螺纹
西门子802D系统 加工中心相关知识介绍
项目十 西门子系统加工中心相关知识介绍
三、孔加工循环指令应用
3.2 柔性攻丝、刚性攻丝简介 1)柔性攻丝(浮动攻丝)
项目十 西门子系统加工中心相关知识介绍 三、孔加工循环指令应用
3.2 柔性攻丝、刚性攻丝简介
2)刚性攻丝207
刚性攻丝:这个对对刀柄没啥要求,像装夹普 通钨钢刀那样就行,也就是是丝锥被夹紧固定住了, 不能浮动,因此在攻丝中如果丝锥磨损太多受不住 力时会易折断的,这是缺点。它的优点是它可以二 次攻牙,假如你要攻一个30mm的螺纹,结果只攻了 20深,那么你可以刚性攻丝,再次攻一下这个螺纹, 攻到30mm深,而且不会乱牙,当然前提是你之前的 攻牙程序中M29等刚性攻丝指令,而之所以刚性攻丝 不会乱牙是因为刀柄中丝锥的长度是不变的,二次 攻牙时的起始位置不变才不会乱牙。
CYCLE83 指令运动顺序图 (VARI=0断屑)
项目十 西门子系统加工中心相关知识介绍
三、孔加工循环指令应用
2、钻深孔——CYCLE83
编程格式:CYCLE83(RTP,RFP,SDIS,DP,DPR,FDEP,FDPR,DAM,DTB,DTS,FRF,VARI)
设工件上表面为Z0(排屑)
N05 G0 G17 G90 G54 Z120 F200 S300 M03 N10 D1 T1 N20 Z70 N30 X8 Y8 N40 MCALL CYCLE83(50,0,5,-23,,-6,, 2,2,2,1,1) N50 X8 Y8 N60 X8 Y-8 N70 X-8 Y-8 N80 X-8 Y8 N90 MCALL N100 G0 Z150 N110 M30
图1 钻孔几何参数示意图
左图: 安全间隙平面为在孔口时,快速运动
与进给运动的转换位置。一般取 3~5mm 左右。
西门子全数字直流调速系统6RA70的Bico参数应用
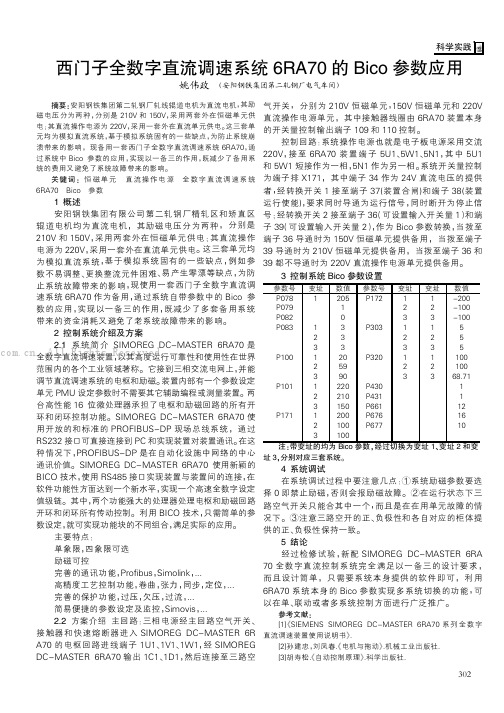
摘要:安阳钢铁集团第二轧钢厂轧线辊道电机为直流电机,其励磁电压分为两种,分别是210V和150V,采用两套外在恒磁单元供电;其直流操作电源为220V,采用一套外在直流单元供电。
这三套单元均为模拟直流系统,基于模拟系统固有的一些缺点,为防止系统崩溃带来的影响,现备用一套西门子全数字直流调速系统6RA70,通过系统中Bico参数的应用,实现以一备三的作用,既减少了备用系统的费用又避免了系统故障带来的影响。
关键词:恒磁单元直流操作电源全数字直流调速系统6RA70Bico参数1概述安阳钢铁集团有限公司第二轧钢厂精轧区和矫直区辊道电机均为直流电机,其励磁电压分为两种,分别是210V和150V,采用两套外在恒磁单元供电;其直流操作电源为220V,采用一套外在直流单元供电。
这三套单元均为模拟直流系统,基于模拟系统固有的一些缺点,例如参数不易调整、更换整流元件困难、易产生零漂等缺点,为防止系统故障带来的影响,现使用一套西门子全数字直流调速系统6RA70作为备用,通过系统自带参数中的Bico参数的应用,实现以一备三的作用,既减少了多套备用系统带来的资金消耗又避免了老系统故障带来的影响。
2控制系统介绍及方案2.1系统简介SIMOREG DC-MASTER6RA70是全数字直流调速装置,以其高度运行可靠性和使用性在世界范围内的各个工业领域著称。
它接到三相交流电网上,并能调节直流调速系统的电枢和励磁。
装置内部有一个参数设定单元PMU设定参数时不需要其它辅助编程或测量装置。
两台高性能16位微处理器承担了电枢和励磁回路的所有开环和闭环控制功能。
SIMOREG DC-MASTER6RA70使用开放的和标准的PROFIBUS-DP现场总线系统,通过RS232接口可直接连接到PC和实现装置对装置通讯。
在这种情况下,PROFIBUS-DP是在自动化设施中网络的中心通讯价值。
SIMOREG DC-MASTER6RA70使用新颖的BICO技术,使用RS485接口实现装置与装置间的连接,在软件功能性方面达到一个新水平,实现一个高速全数字设定值级链。
西门子840D数控系统参数优化分析与研究
西门子840D数控系统参数优化分析与研究摘要:随着工业生产技术的进步,复杂多平面、多曲面零件的精密性成为机械加工行业攻坚克难的关键技术,研制出高精度的数控机床是其最重要解决手段之一。
数控机床的数控系统控制参数的优化对机床的性能提高有着非常重大的意义,但系统参数优化一定要根据客观情况出发,尽可能最大限度的发挥机床的性能。
由于本公司搬迁且已投入使用的设备多为西门子840D数控系统,因此本文主要就西门子840D数控系统参数优化为课题进行分析探究,并提出一些个人观点,以供参考。
关键词:西门子840D;数控系统;参数优化;1西门子840D数控系统的组成西门子840D是由数控及驱动单元(CCU或NCU)MMC,PLC模块三部分组成,由于在集成系统时总是将SIMODRIVE611D驱动和数控单元(CCU或NCU)并排放在一起并用设备总线互相连接,因此在说明时将二者划归一处。
1.1人机界面人机交换界面负责NC数据的输入和显示,它由MMC和OP组成:包括OP单元MMC,MCP三部分。
1.1.1MMCMMC实际上就是一台计算机有自己独立的CPU,还可以带硬盘带软驱;OP单元正是这台带有西门子MMC的控制软件的计算机的显示器。
我们常用的MMC有两种:MMC100.2和MMC103,其中MMC100.2的CPU为486,不能带硬盘;而MMC103的CPU为奔腾可以带硬盘。
一般情况,为西门子840D系统配MMC103。
PCU是专门为配合西门子的操作面板OP10、OP10S、OP10C、OP12、OP15等而开发的MMC模块,目前有三种PCU模块——PCU20、PCU50、PCU70, PCU20对应于MMC100.2,;PCU50、PCU70对应于MMC103且PCU50的软件是基于WINDOWS NT的。
PCU的软件HMI又分为两种:嵌入式HMI和高级HMI。
一般标准供货时PCU20装载的是嵌入式 HMI,而PCU50和PCU70则装载高级HMI。
西门子系统参数的含义
welcome to 's blog...公告我的分类(专题)日志更新最新评论留言板链接搜索Blog信息首页| 上一篇| 下一篇西门子系统参数的含义SIEMENS 840D参数中文含义840d中文参数[sell=200] 10000 机床轴名称10002 NCK机械轴的逻辑图10008 PLC 控制的轴的最大号码10010 方式组的通道有效10050 基本系统循环时间10059 Profibus 报警标识符(只对内部)10060 位置控制循环系数10061 位置控制循环10062 位置控制循环延迟10065 位置设定延迟10070 插补运算器的周期系数10071 插补循环10072 通讯任务周期的系数10074 PLC任务比插补任务的系数10075 PLC循环时间10080 取样实际值分配系数10082 速度设定输出的超前时间10083 位置控制器输出保持时间的偏置10085 中断程序段监控时间(失效-激活)10088 重新启动延迟10089 缺少总线时脉冲抑制的等待时间10090 监控周期的系数10091 检查周期时间的显示10092 安全数据再确认循环时间显示10093 SPL文件存取号刘燃冰 发表于 2008-2-25 20:48:0010094 安全报警禁用级10095 安全方式屏蔽10096 安全诊断功能10097 对于 SPL-差额停止反应 10098 PROFIsafe 通讯的系数10099 PROFI安全 通讯循环时间 10100 最大PLC周期10110 PLC确认的平均时间10120 PLC启动的监控时间10130 与MMC通讯的时间限制10131 过载时屏幕更新处理10132 在零件程序中监控时间MMC命令 10134 同时发生的MMC节点数量 10136 PCS位置的显示方式10140 与驱动通讯的时间限制10150 与驱动通讯的系数10160 与MMC通讯的系数10165 预留:10170 MMC任务的启动时间限制 10180 MMC任务到准备任务的系数 10185 NCK运行时间分量10190 模拟的换刀时间10192 齿轮换挡时间10200 线性位置的计算精度10210 角度位置的计算精度10220 激活比例系数10230 机床数据比例系数10240 基本公制长度单位10250 INCH的转换系数10260 有效转换的基本设定10270 位置表的比例系统10280 对rel.6.3的比较>和<兼容 10284 不同的显示变量方式10290 OEM刀具数据的物理单位10291 SIEMENS-OEM 刀具数据的单位 10292 OEM刀沿数据的物理单位10293 SIEMENS-OEM 刀沿数据的单位 10300 NCK的模拟输入数10310 NCK的模拟输出数10320 NCK模拟输入的比例10330 NCK模拟输出的比例10340 预留:10350 NCK数字输入字节的数量10360 NCK数字输出字节的数量10361 开关量输入输出短路10362 NCK模拟输入的配置10364 NCK模拟输出的配置10366 NCK数字输入配置10368 NCK数字输出的配置10380 更新NCK I/O 设备10382 NCK外设的引导时间10384 NCK I/O的处理10385 PROFI安全-地址 主控-设备10386 PROFI安全-地址 输入-设备10387 PROFI安全-地址 输出-设备10388 输入分配 $A_INSE 到 PROFIsafe-de 10389 输出分配 $A_OUTSE 到 PROFIsafe-de 10390 SPL外部接口的输入分配10392 SPL外部接口的输出分配10394 可直接在 NC 读取的 PLC 输入字节数量 10395 直接读PLC输入位起始地址10396 可直接在 NC 写入的 PLC 输入字节数量 10397 直接写PLC输出位起始地址10398 PLCIO输入循环升级时间10399 用于PLCIO左最高位/右最高位10400 编辑循环输入字节数量10410 编译循环输出字节数10420 编译循环的NCK输出10430 编辑循环的硬件调试屏蔽10450 分配软件凸轮到机床轴 10460 负凸轮1 - 16(32)的时间响应 10461 正凸轮1 - 16(32)的时间响应 10470 I/O设备上1 - 8凸轮的配置 10471 I/O设备上9 -16凸轮的配置 10472 I/O设备上17 - 24凸轮的配置 10473 I/O设备上25 - 32凸轮的配置 10480 NCU凸轮信号输出的屏蔽 10485 凸轮特性10490 测量的软挡块10530 比较器字节1的模拟量输出 10531 比较器字节2的模拟量输出 10540 比较器字节1的参数化10541 比较器字节2的参数化10600 FRAME(框架)旋转的输入类型 10602 几何轴转换的FRAME10604 改变几何轴的工作区限制 10610 镜象参考轴10612 镜象改变10613 NCU全局基础FRAME复位后激活 10615 上电后复位全局基础FRAME 10617 在子程序存储时FRAME行为 10618 GEO轴变化的保护范围10620 欧拉角的名称10630 普通矢量的名称10640 方向矢量的名称10642 旋转矢量的名称10644 临时矢量的名称10646 第二路径方向编程名称 10648 底角的名称10650 插补参数的名称10652 定义轮廓角度名称10654 定义轮廓半径名称10656 定义轮廓斜面名称10660 G2/G3中间坐标点的名称10670 位置信息名称10672 轴位置信息名称10674 多项式编程不带 G 功能 POLY 编程 10700 程序预处理阶段10702 块信号停止预防10704 空运行激活10706 跳越有效10707 编程测试模式10708 程序段搜索模式10710 更新的设定数据10712 未配置的NC代码列表10713 带预处理停止的 M 代码10714 复位后 M 代码 f.主轴激活 10715 M代码由子程序代替10716 M 代码替换的子程序名称10717 T 代码替换的子程序名称10718 带参数的 M 代码替代10719 T功能替换的参数化10720 上电操作方式10722 参数更改10730 手动(JOG)键的功能10731 手动(JOG)键的功能10760 G53,G153,SUPA的说明10780 删除TP编辑启动禁止10800 第一 M 功能通道同步10802 通道同步的最后M功能10804 M 功能激活 ASUP10806 M 功能没激活 ASUP10808 中断程序激活(ASUP)10810 G31 P 测量信号结构10812 带G68双刀架10814 MACRO调用的M功能10815 M功能macro调用的子程序名称 10816 macro调用的G功能10817 G功能macro调用的子程序名称 10818 ASUP启动(M96)的中断数 10820 快速返回的中断数(G10.6) 10850 OEM-G-代码的最大号码10880 合适的 CNC 系统定义10881 ISO_3 模式:G代码系统10882 外部NC语言的用户G代码表 10884 带或不带数值运算命令10886 增量系统10888 刀具的位置号10890 外部语言的刀具编程模式 10892 G00插补10900 分度轴表1位置数10910 分隔位置表110920 分度轴表2的位置数10930 分隔位置表211100 辅助功能组的辅助功能数量 11110 辅助功能组说明11120 程序全局用户数据(PUD)系数有效 11140 除GUD模块以外的地址11200 上电时装载标准数据11210 仅保存修改过的机床数据 11220 INI初始化文件出错时的系统反应 11230 MD文件备份的结构11240 SDB1000号11250 Profibus停机处理11270 NC语言元素的默认值激活 11280 在工件目录处理 INI 文件 11290 在DRAM选择目录11291 DRAM中选择目录11295 记录文件的存储类型11300 JOG方式中的INC和REF11310 方向改变手轮的阀值11320 每个间隔位置的手轮脉冲数11322 每个凸轮爪位置的轮廓手轮脉冲 11324 手轮号码在 VDI 接口中描述 11330 INC/手轮的增量大小11340 第三手轮:驱动类型11342 第三手轮:驱动号/测量电路号 11344 第三手轮:输入模块/测量电路 11346 手轮:11360 INC信号影响方式组11380 安全集成测试机床数据11382 地址单元的INTEGER整数显示 11384 地址单元的REAL显示11386 地址单元的INTEGER整数输入 11388 地址单元的REAL输入11390 地址单元的内容重写11398 轴变量服务器出错11400 激活内部轨迹功能11410 报警输出的屏蔽11411 报警激活11412 报警响应 CHAN_NOREADY 有效 11413 报警参数作为文本输出11420 记录文件大小(KB)11430 数字化时的通道定义11432 选择 3 轴或 3+2 轴数字化 11450 参数化搜索11460 异步往复的模式表单11470 重新配置的属性11480 OB1中PLC轨迹数据的缓存深度 11481 OB35中PLC轨迹数据的缓存深度 11482 OB40中PLC轨迹数据的缓存深度 11500 受保护的同步动作11510 最大允许的IPO负载11600 固定的BAG响应11602 ASUP运行时不考虑停止的原因 11604 ASUP_START_MAS 优先级有效 11610 用户定义 ASUP 程序激活11612 用户定义ASUP编程的保护级11620 PROG_EVENT的程序名称11640 使能间隔在MD $MC_AXCONF_MACHAX_USED 11649 打开在#MC_AXCONF_MACHAX_USED中的保护 11660 可能的电子齿轮箱数量11700 NC卡代码12000 轴进给倍率开关编码12010 轴进给倍率系数12020 灰度 - 编码轨迹进给率开关12030 路径进给倍率的系数12040 灰度码快速运行倍率开关12050 快速进给的倍率系数12060 灰度码主轴倍率开关12070 主轴倍率的系数12080 回参考点速度的倍率12082 进给倍率12100 二进制编码的倍率限定12200 在倍率0时运行12202 直线轴的固定进给率12204 旋转轴的固定进给率12205 主轴固定转速12510 在NCU组中的NCU代码12520 NCU号,总线终止阻抗有效12540 联接总线波特率12550 信息存储区重复的最大量12701 在轴系列1中的轴清单12702 在轴系列2中的轴清单12703 在轴系列3中的轴清单12704 在轴系列4中的轴清单12705 在轴系列5中的轴清单12706 在轴系列6中的轴清单12707 在轴系列7中的轴清单12708 在轴系列8中的轴清单12709 在轴系列9中的轴清单12710 在轴系列10中的轴清单 12711 在轴系列11中的轴清单 12712 在轴系列12中的轴清单 12713 在轴系列13中的轴清单 12714 在轴系列14中的轴清单 12715 在轴系列15中的轴清单 12716 在轴系列16中的轴清单 12750 轴系列名称12970 数字PLC输入地址的起始地址 12971 数字输入地址号12974 数字PLC输出地址的起始地址 12975 数字输出地址号12978 模拟PLC输入地址的起始地址 12979 模拟输入地址号12982 模拟PLC输出地址的起始地址 12983 模拟输出地址号13000 驱动在运行13010 逻辑驱动号13020 驱动模块的功率部分代码 13030 模块识别13040 驱动类型13050 逻辑驱动地址13060 Profibus-DP标准通讯类型 13070 使用DP功能13080 驱动类型 Profibus13100 诊断驱动母线13200 探头极性改变13201 带数字输出的测量脉冲模拟 13210 带Profibus驱动的测头操作类型 13220 探头延迟时间14000 SSI绝对值编码器的波特率 14010 FIPO启动延迟14020 SSI延时14500 输入字节的个数(从PLC) 14502 输出字节的个数(到PLC)14504 用户数据的号(INT)14506 用户数据的号(HEX)14508 用户数据的号(FLOAT)14510 用户数据(INT)14512 用户数据(HEX)14514 用户数据(FLOAT)14516 用户数据(HEX)17200 全局MMC信息(没有物理单元 17201 全局MMC状态信息(没有物理单元) 17500 替换刀具的最大号17510 卸载后刀具 - 数据的运行状态 17520 产生新刀具:默认设置17530 对于 HMI 标记的刀具-数据-变化 17600 REORG中log存储最优化深度 18000 更新PLC接口18040 PCMCIA卡的版本和日期18050 自由无缓冲内存[bytes]18060 自由缓冲内存[bytes]。
7-2 西门子V90伺服系统的参数介绍

内部速度设定值3
斜坡函数发生器斜坡上升时间
斜坡函数发生器斜坡下升时间
•位0:SON •位1:CWL •位2:CCWL •位3:TLIM1 •位4:SPD1 •位5:TSET •位6:EMGS 当一位或多位设高时,相应输入信号强制设高
3.实际操作演示
接着实际操作演示!
感谢您的聆听
THANK YOU!
西门子V90伺服系统的参数介绍
1. V90伺服系统的参数介绍
参数
范围
默认值
p29003
0至8
0
p29301
0至28
1
p29001
0至1
0
p29303
3
p29304
4
p29014
0至1
1
Hale Waihona Puke p290100至3
0
单位
-
-
描述
基本控制模式: •0:外部脉冲位置控制模式 •1:内部设定值位置控制模式 •2:速度控制模式 •3:扭矩控制模式 复合控制模式: •4:控制切换模式:PTI/S •5:控制切换模式:IPos/S •6:控制切换模式:PTI/T •7:控制切换模式:IPos/T •8:控制切换模式:S/T
信号 SON(编号:1)分配至数字量输入1(DI1)
•0:CW(顺时针)为正向 •1:CCW(逆时针)为正向
信号 CWL(编号:3)分配至DI3
信号 CCWL(编号:4)分配至DI4
•0:5 V高速差分脉冲输入(RS485) •1:24 V单端脉冲输入 •0:脉冲+方向,正逻辑 •1:AB相,正逻辑 •2:脉冲+方向,负逻辑 •3:AB相,负逻辑
0至999999
默认值
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
西門子系統參數的意義(1)西門子系統參數的意義[post] 10000 機床軸名稱10002 NCK機械軸的邏輯圖10008 PLC 控制的軸的最大號碼10010 方式組的通道有效10050 基本系統迴圈時間10059 Profibus 報警識別字(只對內部) 10060 位置控制迴圈係數10061 位置控制迴圈10062 位置控制迴圈延遲10065 位置設定延遲10070 插補運算器的周期係數10071 插補迴圈10072 通訊任務周期的係數10074 PLC任務比插補任務的係數10075 PLC迴圈時間10080 取樣實際值分配係數10082 速度設定輸出的超前時間10083 位置控制器輸出保持時間的偏置10085 中斷程式段監控時間(失效-啟動) 10088 重新啓動延遲10089 缺少匯流排時脈衝抑制的等待時間10090 監控周期的係數10091 檢查周期時間的顯示10092 安全資料再確認迴圈時間顯示10093 SPL文件存取號10094 安全報警禁用級10095 安全方式遮罩10096 安全診斷功能10097 對於 SPL-差額停止反應10098 PROFIsafe 通訊的係數10099 PROFI安全通訊迴圈時間10100 最大PLC周期10110 PLC確認的平均時間10120 PLC啓動的監控時間10130 與MMC通訊的時間限制10131 過載時螢幕更新處理10132 在零件程式中監控時間MMC命令10134 同時發生的MMC節點數量10136 PCS位置的顯示方式10140 與驅動通訊的時間限制10150 與驅動通訊的係數10160 與MMC通訊的係數10165 預留:10170 MMC任務的啓動時間限制10180 MMC任務到準備任務的係數10185 NCK運行時間分量10190 類比的換刀時間10192 齒輪換擋時間10200 線性位置的計算精度10210 角度位置的計算精度10220 啟動比例係數10230 機床資料比例係數10240 基本公制長度單位10250 INCH的轉換係數10260 有效轉換的基本設定10270 位置表的比例系統10280 對rel.6.3的比較>和<相容10284 不同的顯示變數方式10290 OEM刀具資料的物理單位10291 SIEMENS-OEM 刀具資料的單位10292 OEM刀沿資料的物理單位10293 SIEMENS-OEM 刀沿資料的單位10300 NCK的類比輸入數10310 NCK的類比輸出數10320 NCK類比輸入的比例10330 NCK類比輸出的比例10340 預留:10350 NCK數位輸入位元組的數量10360 NCK數位輸出位元組的數量10361 開關量輸入輸出短路10362 NCK類比輸入的配置10364 NCK類比輸出的配置10366 NCK數位輸入配置10368 NCK數位輸出的配置10380 更新NCK I/O 設備10382 NCK外設的引導時間10384 NCK I/O的處理10385 PROFI安全-地址主控-設備10386 PROFI安全-地址輸入-設備10387 PROFI安全-地址輸出-設備10388 輸入分配 $A_INSE 到 PROFIsafe-de 10389 輸出分配 $A_OUTSE 到 PROFIsafe-de 10390 SPL外部介面的輸入分配10392 SPL外部介面的輸出分配10394 可直接在 NC 讀取的 PLC 輸入位元組數量10395 直接讀PLC輸入位起始地址10396 可直接在 NC 寫入的 PLC 輸入位元組數量10397 直接寫PLC輸出位起始地址10398 PLCIO輸入迴圈升級時間10399 用於PLCIO左最高位/右最高位10400 編輯迴圈輸入位元組數量10410 編譯迴圈輸出位元組數10420 編譯迴圈的NCK輸出10430 編輯迴圈的硬體調試遮罩10450 分配軟體凸輪到機床軸10460 負凸輪1 - 16(32)的時間回應10461 正凸輪1 - 16(32)的時間回應10470 I/O設備上1 - 8凸輪的配置10471 I/O設備上9 -16凸輪的配置10472 I/O設備上17 - 24凸輪的配置10473 I/O設備上25 - 32凸輪的配置10480 NCU凸輪信號輸出的遮罩10485 凸輪特性10490 測量的軟擋塊10530 比較器位元組1的類比量輸出10531 比較器位元組2的類比量輸出10540 比較器位元組1的參數化10541 比較器位元組2的參數化10600 FRAME(框架)旋轉的輸入類型10602 幾何軸轉換的FRAME10604 改變幾何軸的工作區限制10610 鏡象參考軸10612 鏡象改變10613 NCU全局基礎FRAME重定後啟動10615 上電後重定全局基礎FRAME 10617 在副程式存儲時FRAME行爲10618 GEO軸變化的保護範圍10620 歐拉角的名稱10630 普通向量的名稱10640 方向向量的名稱10642 旋轉向量的名稱10644 臨時向量的名稱10646 第二路徑方向編程名稱10648 底角的名稱10650 插補參數的名稱10652 定義輪廓角度名稱10654 定義輪廓半徑名稱10656 定義輪廓斜面名稱10660 G2/G3中間座標點的名稱10670 位置資訊名稱10672 軸位置資訊名稱10674 多項式編程不帶 G 功能 POLY 編程10700 程式預處理階段10702 塊信號停止預防10704 空運行啟動10706 跳越有效10707 編程測試模式10708 程式段搜索模式10710 更新的設定資料10712 未配置的NC代碼列表10713 帶預處理停止的 M 代碼10714 重定後 M 代碼 f.主軸啟動10715 M代碼由副程式代替10716 M 代碼替換的副程式名稱10717 T 代碼替換的副程式名稱10718 帶參數的 M 代碼替代10719 T功能替換的參數化10720 上電操作方式10722 參數更改10730 手動(JOG)鍵的功能10731 手動(JOG)鍵的功能10760 G53,G153,SUPA的說明10780 刪除TP編輯啓動禁止10800 第一 M 功能通道同步10802 通道同步的最後M功能10804 M 功能啟動 ASUP10806 M 功能沒啟動 ASUP10808 中斷程式啟動(ASUP)10810 G31 P 測量信號結構10812 帶G68雙刀架10814 MACRO調用的M功能10815 M功能macro調用的副程式名稱10816 macro調用的G功能10817 G功能macro調用的副程式名稱10818 ASUP啓動(M96)的中斷數10820 快速返回的中斷數(G10.6)10850 OEM-G-代碼的最大號碼10880 合適的 CNC 系統定義10881 ISO_3 模式:G代碼系統10882 外部NC語言的用戶G代碼表10884 帶或不帶數值運算命令10886 增量系統10888 刀具的位置號10890 外部語言的刀具編程模式10892 G00插補10900 分度軸表1位置數10910 分隔位置表110920 分度軸表2的位置數10930 分隔位置表211100 輔助功能組的輔助功能數量11110 輔助功能組說明11120 程式全局用戶資料(PUD)係數有效11140 除GUD模組以外的位址11200 上電時裝載標準資料11210 僅保存修改過的機床資料11220 INI初始化文件出錯時的系統反應11230 MD文件備份的結構11240 SDB1000號11250 Profibus停機處理11270 NC語言元素的預設值啟動11280 在工件目錄處理 INI 文件11290 在DRAM選擇目錄11291 DRAM中選擇目錄11295 記錄文件的存儲類型11300 JOG方式中的INC和REF11310 方向改變手輪的閥值11320 每個間隔位置的手輪脈衝數11322 每個凸輪爪位置的輪廓手輪脈衝11324 手輪號碼在 VDI 介面中描述11330 INC/手輪的增量大小11340 第三手輪:驅動類型11342 第三手輪:驅動號/測量電路號11344 第三手輪:輸入模組/測量電路11346 手輪:11360 INC信號影響方式組11380 安全集成測試機床資料11382 位址單元的INTEGER整數顯示11384 位址單元的REAL顯示11386 位址單元的INTEGER整數輸入11388 地址單元的REAL輸入11390 地址單元的內容重寫11398 軸變數伺服器出錯11400 啟動內部軌迹功能11410 報警輸出的遮罩11411 報警啟動11412 報警回應 CHAN_NOREADY 有效11413 報警參數作爲文本輸出11420 記錄文件大小(KB)11430 數位化時的通道定義11432 選擇 3 軸或 3+2 軸數位化11450 參數化搜索11460 非同步往復的模式表單11470 重新配置的屬性11480 OB1中PLC軌迹資料的緩存深度11481 OB35中PLC軌迹資料的緩存深度11482 OB40中PLC軌迹資料的緩存深度11500 受保護的同步動作11510 最大允許的IPO負載11600 固定的BAG回應11602 ASUP運行時不考慮停止的原因11604 ASUP_START_MAS 優先順序有效11610 用戶定義 ASUP 程式啟動11612 用戶定義ASUP編程的保護級11620 PROG_EVENT的程式名稱11640 使能間隔在MD $MC_AXCONF_MACHAX_USED 11649 打開在#MC_AXCONF_MACHAX_USED中的保護11660 可能的電子齒輪箱數量11700 NC卡代碼12000 軸進給倍率開關編碼12010 軸進給倍率係數12020 灰度 - 編碼軌迹進給率開關12030 路徑進給倍率的係數12040 灰度碼快速運行倍率開關12050 快速進給的倍率係數12060 灰度碼主軸倍率開關12070 主軸倍率的係數12080 回參考點速度的倍率12082 進給倍率12100 二進位編碼的倍率限定12200 在倍率0時運行12202 直線軸的固定進給率12204 旋轉軸的固定進給率12205 主軸固定轉速12510 在NCU組中的NCU代碼12520 NCU號,匯流排終止阻抗有效12540 聯接匯流排串列傳輸速率12550 資訊存儲區重復的最大量12701 在軸系列1中的軸清單12702 在軸系列2中的軸清單12703 在軸系列3中的軸清單12704 在軸系列4中的軸清單12705 在軸系列5中的軸清單12706 在軸系列6中的軸清單12707 在軸系列7中的軸清單12708 在軸系列8中的軸清單12709 在軸系列9中的軸清單12710 在軸系列10中的軸清單12711 在軸系列11中的軸清單12712 在軸系列12中的軸清單12713 在軸系列13中的軸清單12714 在軸系列14中的軸清單12715 在軸系列15中的軸清單12716 在軸系列16中的軸清單12750 軸系列名稱12970 數位PLC輸入位址的起始位址12971 數位輸入位址號12974 數位PLC輸出位址的起始位址12975 數位輸出位址號12978 類比PLC輸入地址的起始地址12979 類比輸入地址號12982 類比PLC輸出地址的起始地址12983 類比輸出地址號13000 驅動在運行13010 邏輯驅動號13020 驅動模組的功率部分代碼13030 模組識別13040 驅動類型13050 邏輯驅動位址13060 Profibus-DP標準通訊類型13070 使用DP功能13080 驅動類型 Profibus13100 診斷驅動母線13200 探頭極性改變13201 帶數位輸出的測量脈衝類比13210 帶Profibus驅動的測頭操作類型13220 探頭延遲時間14000 SSI絕對值編碼器的串列傳輸速率14010 FIPO啓動延遲14020 SSI延時14500 輸入位元組的個數(從PLC) 14502 輸出位元組的個數(到PLC) 14504 用戶資料的號(INT)14506 用戶資料的號(HEX)14508 用戶資料的號(FLOAT)14510 用戶資料(INT)14512 用戶資料(HEX)14514 用戶資料(FLOAT)14516 用戶資料(HEX)17200 全局MMC資訊(沒有物理單元17201 全局MMC狀態資訊(沒有物理單元)17500 替換刀具的最大號17510 卸載後刀具 - 資料的運行狀態17520 産生新刀具:默認設置17530 對於 HMI 標記的刀具-資料-變化17600 REORG中log存儲最優化深度18000 更新PLC介面18040 PCMCIA卡的版本和日期18050 自由無緩衝記憶體[bytes] 18060 自由緩衝記憶體[bytes]。