SINUMERIK西门子系统加工中心编程各代码.doc
数控编程代码大全(DOC)
数控编程代码大全(DOC)数控编程代码大全FANUC车床G代码FANUC铣床G代码FANUC M指令代码SIEMENS铣床G代码SIEMENS802S/CM 固定循环SIEMENS802DM/810/840DM 固定循环SIEMENS车床G 代码SIEMENS 801、802S/CT、802SeT 固定循环SIEMENS 802D、810D/840D 固定循环HNC车床G代码HNC铣床G代码HNC M指令KND100铣床G代码KND100车床G代码KND100 M指令GSK980车床G代码GSK980T M指令GSK928 TC/TE G代码GSK928 TC/TE M指令GSK990M G代码GSK990M M指令GSK928MA G代码GSK928MA M指令三菱E60 铣床G代码DASEN 3I铣床G代码DASEN 3I车床G代码华兴车床G代码华兴M指令华兴铣床G代码华兴M指令仁和32T G代码仁和32T M指令SKY 2003N M G代码SKY 2003N M M指令1.FANUC车床G代码G代码解释G00定位(快速移动)G01直线切削G02顺时针切圆弧(CW,顺时钟)G03逆时针切圆弧(CCW,逆时钟)G04暂停(Dwell)G09停于精确的位置G20英制输入G21公制输入G22内部行程限位有效G23内部行程限位无效G27检查参考点返回G28参考点返回G29从参考点返回G30回到第二参考点G32切螺纹G40取消刀尖半径偏置G41刀尖半径偏置(左侧)G42刀尖半径偏置(右侧)G50修改工件坐标;设置主轴最大的RPMG52设置局部坐标系G53选择机床坐标系G70精加工循环G71内外径粗切循环G72台阶粗切循环G73成形重复循环G74Z 向步进钻削G75X 向切槽G76切螺纹循环G80取消固定循环G83钻孔循环G84攻丝循环G85正面镗孔循环G87侧面钻孔循环G88侧面攻丝循环G89侧面镗孔循环G90(内外直径)切削循环G92切螺纹循环G94(台阶) 切削循环G96恒线速度控制G97恒线速度控制取消G98每分钟进给率G99每转进给率2.FANUC铣床G代码G代码解释G00顶位(快速移动)定位(快速移动) G01直线切削G02顺时针切圆弧G03逆时针切圆弧G04暂停G15/G16极坐标指令. G17XY 面赋值G18XZ 面赋值G19YZ 面赋值G28机床返回原点G30机床返回第2和第3原点*G40取消刀具直径偏移G41刀具直径左偏移G42刀具直径右偏移*G43刀具长度+ 方向偏移*G44刀具长度- 方向偏移G49取消刀具长度偏移*G53机床坐标系选择G54工件坐标系1选择G55工件坐标系2选择G56工件坐标系3选择G57工件坐标系4选择G58工件坐标系5选择G59工件坐标系6选择G73高速深孔钻削循环G74左螺旋切削循环G76精镗孔循环*G80取消固定循环G81中心钻循环G82反镗孔循环G83深孔钻削循环G84右螺旋切削循环G85镗孔循环G86镗孔循环G87反向镗孔循环G88镗孔循环G89镗孔循环*G90使用绝对值命令G91使用增量值命令G92设置工件坐标系*G98固定循环返回起始点*G99返回固定循环R点G50比例缩放G51G68坐标系旋转G693.FANUC M指令代码M代码说明M00程序停M01选择停止M02程序结束(复位)M03主轴正转(CW)M04主轴反转(CCW)M05主轴停M06换刀M08切削液开M09切削液关M30程序结束(复位) 并回到开头M48主轴过载取消不起作用M49主轴过载取消起作用M94镜象取消M95X坐标镜象M96Y坐标镜象M98子程序调用M99子程序结束4.SIEMENS铣床G代码地址含义D刀具刀补号F进给率(与G4 一起可以编程停留时间) GG功能(准备功能字)G0快速移动G1直线插补G2顺时针圆弧插补G3逆时针圆弧插补CIP中间点圆弧插补G33恒螺距的螺纹切削G331不带补偿夹具切削内螺纹G332不带补偿夹具切削内螺纹. 退刀CT带切线的过渡圆弧插补G4快速移动G63快速移动G74回参考点G75回固定点G25主轴转速下限G26主轴转速上限G110极点尺寸,相对于上次编程的设定位置G110极点尺寸,相对于当前工件坐标系的零点G120极点尺寸,相对于上次有效的极点G17*X/Y平面G18Z/X平面G19Y/Z平面G40刀尖半径补偿方式的取消G41调用刀尖半径补偿, 刀具在轮廓左侧移动G42调用刀尖半径补偿, 刀具在轮廓右侧移动G500取消可设定零点偏置G54第一可设定零点偏置G55第二可设定零点偏置G56第三可设定零点偏置G57第四可设定零点偏置G58第五可设定零点偏置G59第六可设定零点偏置G53按程序段方式取消可设定零点偏置G60*准确定位G70英制尺寸G71*公制尺寸G700英制尺寸,也用于进给率FG710公制尺寸,也用于进给率FG90*绝对尺寸G91增量尺寸G94*进给率F,单位毫米/分G95主轴进给率F,单位毫米/转G901在圆弧段进给补偿“开”G900进给补偿“关”G450圆弧过渡G451等距线的交点I插补参数J插补参数K插补参数I1圆弧插补的中间点J1圆弧插补的中间点K1圆弧插补的中间点L子程序名及子程序调用M辅助功能M0程序停止M1程序有条件停止M2程序结束M3主轴顺时针旋转M4主轴逆时针旋转M5主轴停M6更换刀具N副程序段:主程序段P子程序调用次数RET子程序结束S主轴转速,在G4 中表示暂停时间T刀具号X坐标轴Y坐标轴Z坐标轴CALL循环调用CHF倒角,一般使用CHR倒角轮廓连线CR圆弧插补半径GOTOB向后跳转指令GOTOF向前跳转指令RND圆角支持参数编程5.SIEMENS802S/CM 固定循环循环说明LCYC82钻削,沉孔加工LCYC83深孔钻削LCYC840带补偿夹具的螺纹切削LCYC84不带补偿夹具的螺纹切削LCYC85镗孔LCYC60线性孔排列LCYC61圆弧孔排列LCYC75矩形槽,键槽,圆形凹槽铣削SIEMENS802DM/810/840DM 固定循环循环说明CYCLE82中心钻孔CYCLE83深孔钻削CYCLE84性攻丝CYCLE85铰孔CYCLE86镗孔CYCLE88带停止镗孔CYCLE71端面铣削LONGHOLE一个圆弧上的长方形孔POCKET4环形凹槽铣削POCKET3矩形凹槽铣削SLOT1一个圆弧上的键槽SLOT2环行槽6.SIEMENS车床G 代码地址含义D刀具刀补号FF进给率(与G4 一起可以编程停留时间) GG功能(准备功能字) G0快速移动G1直线插补G2顺时针圆弧插补G3逆时针园弧插补G33恒螺距的螺纹切削G4快速移动G63快速移动G74回参考点G75回固定点G17(在加工中心孔时要求)G18*Z/X平面G40刀尖半径补偿方式的取消G41调用刀尖半径补偿, 刀具在轮廓左侧移动G42调用刀尖半径补偿, 刀具在轮廓右侧移动G500取消可设定零点偏置G54第一可设定零点偏置G55第二可设定零点偏置G56第三可设定零点偏置G57第四可设定零点偏置G58第五可设定零点偏置G59第六可设定零点偏置G53按程序段方式取消可设定零点偏置G70英制尺寸G71*公制尺寸G90*绝对尺寸G91增量尺寸G94*进给率F,单位毫米/分G95主轴进给率F,单位毫米/转I插补参数I1圆弧插补的中间点K1圆弧插补的中间点L子程序名及子程序调用M辅助功能M0程序停止M1程序有条件停止M2程序结束M30M17M3主轴顺时针旋转M4主轴逆时针旋转M5主轴停M6更换刀具N副程序段:主程序段P子程序调用次数RET子程序结束S主轴转速,在G4 中表示暂停时间T刀具号X坐标轴Y坐标轴Z坐标轴AR圆弧插补张角CALL循环调用CHF倒角,一般使用CHR倒角轮廓连线CR圆弧插补半径GOTOB向后跳转指令GOTOF向前跳转指令RND圆角支持参数编程7.SIEMENS 801、802S/CT、802SeT 固定循环循环说明LCYC82钻削,沉孔加工LCYC83深孔钻削LCYC840带补偿夹具的螺纹切削LCYC84不带补偿夹具的螺纹切削LCYC85镗孔LCYC93切槽循环LCYC95毛坯切削循环LCYC97螺纹切削SIEMENS 802D、810D/840D 固定循环循环说明CYCLE71平面铣削CYCLE82中心钻孔YCLE83深孔钻削CYCLE84刚性攻丝CYCLE85铰孔CYCLE86镗孔CYCLE88带停止镗孔CYCLE93切槽CYCLE94退刀槽形状E..FCYCLE95毛坯切削CYCLE97螺纹切削8.HNC车床G代码G代码解释G00定位(快速移动)G01直线切削G02顺时针切圆弧(CW,顺时钟) G03逆时针切圆弧(CCW,逆时钟) G04暂停(Dwell)G09停于精确的位置G20英制输入G21公制输入G22内部行程限位有效G23内部行程限位无效G27检查参考点返回. G28参考点返回G29从参考点返回G30回到第二参考点G32切螺纹G36直径编程G37半径编程G40取消刀尖半径偏置G41刀尖半径偏置(左侧)G42刀尖半径偏置(右侧)G53直接机床坐标系编程G54—G59坐标系选择G71内外径粗切循环G72台阶粗切循环G73闭环车削复合循环G76切螺纹循环G80内外径切削循环G81端面车削固定循环G82螺纹切削固定循环G90绝对值编程G91增量值编程G92工件坐标系设定G96恒线速度控制G97恒线速度控制取消G94每分钟进给率G95每转进给率9.HNC铣床G代码G代码组别解释*G001定位(快速移动)G01直线切削G02顺时针切圆弧G03逆时针切圆弧G040暂停G0716虚轴指定G090准停校验*G172XY 面赋值G18XZ 面赋值G19YZ 面赋值G208英寸输入*G21毫米输入G22脉冲当量G243镜像开. *G25镜像关G280返回到参考点G29由参考点返回*G407取消刀具直径偏移G41刀具直径左偏移G42刀具直径右偏移G438刀具长度+ 方向偏移G44刀具长度- 方向偏移*G49取消刀具长度偏移*G504缩放关G51缩放开G520局部坐标系设定G53直接机床坐标系编程*G5414工件坐标系1选择G55工件坐标系2选择G56工件坐标系3选择G57工件坐标系4选择G58工件坐标系5选择G59工件坐标系6选择G600单方向定位*G6112精确停止校验方式G64连续方式G685旋转变换*G69旋转取消G739高速深孔钻削循环G74左螺旋切削循环G76精镗孔循环*G80取消固定循环G81中心钻循环G82反镗孔循环G83深孔钻削循环G84右螺旋切削循环G85镗孔循环G86镗孔循环G87反向镗孔循环G88镗孔循环G89镗孔循环*G903使用绝对值命令G91使用增量值命令G920设置工件坐标系*G9414每分钟进给G95每转进给*G9810固定循环返回起始点. G99返回固定循环R点10.HNC M指令M代码说明M00程序停M01选择停止M02程序结束(复位)M03主轴正转(CW)M04主轴反转(CCW)M05主轴停M06换刀M07切削液开M09切削液关M98子程序调用M99子程序结束11.KND100铣床G代码G代码组别解释G001定位(快速移动)G01直线切削G02顺时针切圆弧G03逆时针切圆弧G040暂停G172XY 面赋值G18XZ 面赋值G19YZ 面赋值G280机床返回原点G29从参考点返回*G407取消刀具直径偏移G41刀具直径左偏移G42刀具直径右偏移*G438刀具长度+ 方向偏移*G44刀具长度- 方向偏移G49取消刀具长度偏移*G5314机床坐标系选择G54工件坐标系1选择G55工件坐标系2选择G56工件坐标系3选择G57工件坐标系4选择G58工件坐标系5选择G59工件坐标系6选择G739高速深孔钻削循环G74左螺旋切削循环G76精镗孔循环*G80取消固定循环. G81钻孔循环(点钻)G82钻孔循环(镗阶梯孔)G83深孔钻削循环G84攻丝循环G85镗孔循环G86钻孔循环G87反向镗孔循环G88镗孔循环G89镗孔循环*G903使用绝对值命令G91使用增量值命令G920设置工件坐标系*G9810固定循环返回起始点*G99返回固定循环R点12.KND100车床G代码G代码组别解释G001定位(快速移动)G01直线切削G02顺时针切圆弧(CW,顺时钟) G03逆时针切圆弧(CCW,逆时钟) G040暂停(Dwell)G10偏移值设定G206英制输入G21公制输入G270检查参考点返回G28参考点返回G29从参考点返回G31跳跃机能G321切螺纹G36X轴自动刀偏设定G37Z轴自动刀偏设定G407取消刀尖半径偏置G41刀尖半径偏置(左侧)G42刀尖半径偏置(右侧)G500坐标系设定G54工件坐标系G55---G59工件坐标系G700精加工循环G71内外径粗切循环G72台阶粗切循环G73成形重复循环G74端面深孔加工循环G75外圆、内圆切削循环. G76切螺纹循环G901(内外直径)切削循环G92切螺纹循环G94(台阶) 切削循环G9612恒线速度控制G97恒线速度控制取消G985每分钟进给率G99每转进给率13.KND100 M指令M代码说明M00程序停M01选择停止M02程序结束(复位)M03主轴正转(CW)M04主轴反转(CCW)M05主轴停M06换刀M08切削液开M09切削液关M10卡紧M11松开M32润滑开M33润滑关M98子程序调用M99子程序结束14.GSK980车床G代码G代码组别功能G001定位(快速移动)*G01直线插补(切削进给)G02圆弧插补CW(顺时针)G03圆弧插补CCW(逆时针)G28 返回参考点G32 1螺纹切削G50 0坐标系设定G65 00 宏程序命令G71外圆粗车循环G72端面粗车循环G73封闭切削循环G74端面深孔加工循环G75外圆,内圆切槽循环G92螺纹切削循环G94 端面切削循环G97恒线速关G99每转进给15.GSK980T M指令M代码说明M03主轴正转M04主轴反转M05主轴停止M08冷却液开M09冷却液关(不输出信号)M32润滑开M33润滑关(不输出信号)M10备用M11备用尖(不输出信号)M00程序暂停,按‘循环起动’程序继续执行M30程序结束,程序返回开始16.GSK928 TC/TE G代码G代码功能G00定位(快速移动)*G01直线插补(切削进给)G02圆弧插补CW(顺时针)G03圆弧插补CCW(逆时针)G32攻牙循环G33 螺纹切削G71外圆粗车循环G72端面粗车循环G74端面深孔加工循环G75外圆,内圆切槽循环G90 外圆,内圆车削循环G92螺纹切削循环G94 外圆内圆锥面循环G22局部循环开始G80局部循环结束*G98 每分进给G99每转进给G50设置工件绝对坐标系G26X、Z轴回参考G27X轴回参考点G29Z轴回参考点17.GSK928 TC/TE M指令M代码说明M03主轴正转M04主轴反转M05主轴停止M08冷却液开M09冷却液关(不输出信号)M32润滑开M33润滑关(不输出信号)M10备用M11备用尖(不输出信号)M00程序暂停,按‘循环起动’程序继续执行M30程序结束,程序返回开始18.GSK990M G代码G代码组别解释G001定位(快速移动)G01直线切削G02顺时针切圆弧G03逆时针切圆弧G040暂停G172XY 面赋值G18XZ 面赋值G19YZ 面赋值G280机床返回原点G29从参考点返回*G407取消刀具直径偏移G41刀具直径左偏移G42刀具直径右偏移*G438刀具长度+ 方向偏移*G44刀具长度- 方向偏移G49取消刀具长度偏移*G5314机床坐标系选择G54工件坐标系1选择G55工件坐标系2选择G56工件坐标系3选择G57工件坐标系4选择G58工件坐标系5选择G59工件坐标系6选择G73高速深孔钻削循环G74左螺旋切削循环G76精镗孔循环*G80取消固定循环. G81钻孔循环(点钻)G829钻孔循环(镗阶梯孔)G83深孔钻削循环G84攻丝循环G85镗孔循环G86钻孔循环G87反向镗孔循环G88镗孔循环G89镗孔循环*G903使用绝对值命令G91使用增量值命令G920设置工件坐标系*G9810固定循环返回起始点*G99返回固定循环R点19.GSK990M M指令M代码说明M00程序停M01选择停止M02程序结束(复位)M03主轴正转(CW)M04主轴反转(CCW)M05主轴停M06换刀M08切削液开M09切削液关M10卡紧M11松开M32润滑开M33润滑关M98子程序调用M99子程序结束20.GSK928MA G代码G代码解释G00定位(快速移动)G1直线切削G02顺时针切圆弧G03逆时针切圆弧G04延时等待G17XY 面赋值G18XZ 面赋值G19YZ 面赋值G28机床返回原点G29从参考点返回*G40取消刀具直径偏移G41刀具直径左偏移G42刀具直径右偏移*G43刀具长度+ 方向偏移*G44刀具长度- 方向偏移G49取消刀具长度偏移*G53机床坐标系选择G54工件坐标系1选择G55工件坐标系2选择G56工件坐标系3选择G57工件坐标系4选择G58工件坐标系5选择G59工件坐标系6选择G73高速深孔钻削循环G74左螺旋切削循环G80取消固定循环G81钻孔循环(点钻)G82钻孔循环(镗阶梯孔)G83深孔钻削循环G84右旋攻牙循环G85镗孔循环G86钻孔循环G89镗孔循环*G90使用绝对值命令G91使用增量值命令G92设置浮动坐标系*G98固定循环返回起始点*G99返回固定循环R点G10 G11圆凹槽内粗铣G12 G13全圆内精铣G14 G15外圆精铣G22系统参数运算(模态)G23判参数值跳转G27机械零点检测G28经中间点快速定位到程序G31快速返回R基准面G34 G35矩形凹槽内精铣G38 G39矩形外精铣21.GSK928MA M指令M指令解释M0程序停止。
找全了,西门子数控系统(加工中心)指令对照表

找全了,西门子数控系统(加工中心)指令对照表中文含义西门子快速定位G00 X_ Y_ Z_直线插补G01 X_ Y_ Z_ F_圆弧插补半径编程G02/G03 X_ Y_ CR=_ F_圆弧插补圆心编程G02/G03 X_ Y_I_ J_ F_进给暂停G04 F (秒)G04 S(转速) (S为转速,只有主轴受控机床才可是使用)工作平面G17* X-Y G18 Z-X G19 Y-Z绝对/相对G90*绝对G91相对进给G94*分进给/G95转进给输入单位G71*公制/G70英制刀具半径补偿G41左刀补 G42右刀补 G40取消刀补G41/G42 G90/G91 G01 X_ Y_ D_ F_ (建立) G40 G90/G91 G01 X_ Y_ F_ (取消)刀具长度补偿T_D_ + G5_例如G00 Z_ T_D_;坐标偏移TRANS X_ Y_ Z_ (绝对)ATRANS X_ Y_ Z_ (附加于前一个指令) TRANS 单独占一行,取消坐标偏移坐标旋转ROT RPL= __ (RPL后跟旋转度数)AROT RPL=__(附加前一个指令)ROT单独占一行,取消坐标旋转比例缩放SCALE X_Y_ (比1大放大,比1小缩小) ASCALE X_Y_(附加前一个指令)SCALE单独占一行,取消比例缩放镜像MIRROR X0 Y0 (关于X轴对称写Y0,反之亦然,X、Y后面只要跟一个数字即可,没意义)AMIRROR X0 Y0 (附加前一个指令)MIRROR 单独占一行,取消镜像极坐标AP极角 RP极径孔循环CYCLE 81、82、83、84、HOLSE等宏指令变量符号为R1-R249,R0为空变量运算(+、-、*、/、COS、SIN、TAN、SQRT)=、>、>=、、<>、><>等于、大于、大于等于、小于、小于等于、不等于)IF R1>=42.1 GOTOB AAA运算公式要加小括号“()”,比如COS(45)R1=6AAA: G01 X=R1 Y0;运算顺序:先三角函数,后乘除,再加减;先括号里面,后括号外面。
SINUMERIK西门子系统加工中心编程各代码.doc
西门子系统,在机床没有回零点时,也可以循环起动的方法。
在启动状态下(诊断一机床设定)输入DB126 DBX4.0,B,1 西门子系统,等分圆周孔,钻孔循环的另一种方法,MACLL CYCLE81(100,0,5,,20)HOLES 1 或2(0,0,126,90,360/7,7)MACLL1, 是直线2, 是圆周0,起始角度0,起始点Z值126,半径90,第一孔的起始角度360/7,在360度内钻7个孔7, —共要钻7个孔西门子系统按键说明:区域转换键菜单扩展键返回键加工显示键自动方式单段运行手动方式J门子系统操作面板,英—汉对照说明:JOG 手动方式窗口:PresetScratch 对刀Handwheel 手轮ICN ICNGfct+transf G 功能Auxiliary func 功能表Spindles 主轴功能Axis federate 轴功能表Zoom act .val 坐标值放大Act.val MCS 机床坐标系/绝对坐标系;<<<<<<<<<<<<<<<<<<<<<<<<<<<AUTO 自动方式窗口:Over-storeDRF offsetProgram control 程序控制Block searchHandwheel 手轮Correct programProgram overviewGfct+transf G 功能Auxiliary func 功能表Spindles 主轴功能Axis federate 轴功能表Zoom act .val 坐标值放大Act.val MCS 机床坐标系/绝对坐标系;<<<<<<<<<<<<<<<<<<<<<<<<<<<MDA 方式窗口Program control 程序控制Handwheel 手轮Editor function 编辑MDA file fct MDA 程序管理Gfct+transf G 功能Auxiliary func 功能表Spindles 主轴功能Axis federate 轴功能表Zoom act .val 坐标值放大Act.val MCS 机床坐标系/绝对坐标系Delete MDA buffer 删除MDA 缓冲区;<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<< 按区域转换键后的窗口:Machine 机床Parameter 参数Program 程序Services 服务Diagnosis 诊断Startup 起动AUTO 自动方式MDA MDA 方式JOG 手动方式R.EPOSREF ;<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<< 按Parameter 参数选择键后的窗口:Magazine list 刀具补偿R parameter R 参数Setting data 设定数据(维修时用)Zero offset 零点偏置User data 用户数据Actire ZO+compens 坐标激活Tool manageme 刀具管理Axes+ 轴+Axes- 轴-Rotation scale mirr Base ZOSet ZO;<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<< 按Program 程序选择键后的窗口:Work—pieces 工件Part programs 工件程序Sub—programs 子程序User cycles用户循环Clip —board 剪粘板Log记录Interactiv programing 对话式编程New新的Copy复制Inserl粘贴Delete删除Rename重命名AlterenableInteractiv programing 对话式编程New新的Load装载Unload卸载Smulation 模拟Manage programs 程序管理Seleet选择Save setup data 保存数据;vvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvv 按Services服务选择键后的窗口:Data in数据输入Data out数据输出Manage data数据管理Data selection 数据选择In terface 接口V24 RS232C 接口PG编程器Disk磁盘Archive…文档NC card NC 卡;vvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvv 按Diagnosis诊断选择键后的窗口:Alarms报警Messages 信息Alarm log报警记录Serrice displays 服务显示Plc status :-型LC 状态Display newStore logSort young — old;vvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvvv按Program control 程序控制,选择键后的窗口:Skp:skip block Dry:dry runfederate ROV:rap:trat o / rideM01:program stopDisplay erav bloks anly 仅显示程序段移动西门子系统打开两个程序窗口,可以相互复制程序段的操作步骤:新建一个文件或打开一个文件 一-按双页面键” 一-■丁开第二个文件一-按程序段选择键”,选中要复制 的程序段一-按复制程序段”键一-按NEXT/Window 键,也就是把光标换到另一个文件下面 一-按粘贴 程序段键 > 按确定软键”。
西门子SINUMERIK数控系统编程和操作手册(手动机床(MM+),车削)说明书

SINUMERIKSINUMERIK 808D, SINUMERIK 808D ADVANCED编程和操作手册(手动机床(MM+),车削)用户手册法律资讯警告提示系统为了您的人身安全以及避免财产损失,必须注意本手册中的提示。
人身安全的提示用一个警告三角表示,仅与财产损失有关的提示不带警告三角。
警告提示根据危险等级由高到低如下表示。
危险表示如果不采取相应的小心措施,将会导致死亡或者严重的人身伤害。
警告表示如果不采取相应的小心措施,可能导致死亡或者严重的人身伤害。
小心表示如果不采取相应的小心措施,可能导致轻微的人身伤害。
注意表示如果不采取相应的小心措施,可能导致财产损失。
当出现多个危险等级的情况下,每次总是使用最高等级的警告提示。
如果在某个警告提示中带有警告可能导致人身伤害的警告三角,则可能在该警告提示中另外还附带有可能导致财产损失的警告。
合格的专业人员本文件所属的产品/系统只允许由符合各项工作要求的合格人员进行操作。
其操作必须遵照各自附带的文件说明,特别是其中的安全及警告提示。
由于具备相关培训及经验,合格人员可以察觉本产品/系统的风险,并避免可能的危险。
按规定使用Siemens 产品请注意下列说明:警告Siemens 产品只允许用于目录和相关技术文件中规定的使用情况。
如果要使用其他公司的产品和组件,必须得到 Siemens 推荐和允许。
正确的运输、储存、组装、装配、安装、调试、操作和维护是产品安全、正常运行的前提。
必须保证允许的环境条件。
必须注意相关文件中的提示。
© Siemens AG 2017. 保留所有权利编程和操作手册(手动机床(MM+),车削) 前言适用产品该手册适用于以下数控系统: 数控系统软件版本 SINUMERIK 808D ADVANCED T (车削)SINUMERIK 808D ADVANCED M (铣削)V4.7.4:PPU161.3/PPU160.2,带主轴/进给伺服系统 SINUMERIK 808D (车削)SINUMERIK 808D (铣削)V4.7.4:PPU141.2,带进给伺服系统 文档组成与目标读者 最终用户文档目标读者 编程和操作手册(车削)车床的编程人员和操作人员 编程和操作手册(铣削)铣床的编程人员和操作人员 编程和操作手册(ISO 车削/铣削)车床/铣床的编程人员和操作人员 编程和操作手册(手动机床(MM+),车削)车床的编程人员和操作人员 诊断手册机械和电气设计人员,调试工程师,机床操作人员和维修服务人员 制造商/维修文档目标读者 调试手册安装人员,调试工程师和维修服务人员 功能手册机械和电气设计人员,技术专家 参数手册机械和电气设计人员,技术专家 维修手册机械和电气设计人员、技术专家、调试工程师以及服务和维护人员 自述文件第三方软件 - 许可条件和版权说明我的文档管理器(MDM )如何在西门子文档内容的基础上创建自定义文档,请访问以下链接:/mdm标准功能范畴本手册仅描述了标准功能范畴。
SIEMENS数控系统编程指令详解.doc

SIEMENS数控系统编程指令详解第一章编程语言1.1 准备功能(G指令)一般用NC语言对单个操作步骤进行实际编程,只能代表一个NC程序中工作的一部分。
实际指令编程之前,应先对操作步骤进行计划和准备,对NC程序的结构和组织考虑的越周详,所产生的复杂程序就会越清晰、准确,而且生成的速度就会越快,越简便。
通常按如下编程步骤进行:根据图纸要求、指定加工方案;测量每一把刀具的长度及半径;确定工件零点坐标系的位置;计算出每把刀具的切削用量;编制加工零件程序;根据程序图形模拟,查看刀具运行轨迹;空运行,查看刀具运行轨迹;试切削、检验、优化加工程序。
每一个程序都有一个不同的名称叫程序名,编程时可以任意选择名称。
在编辑程序时首先要建立一个新程序名,然后才能编制加工程序。
建立新程序名时要注意以下几点:前一个符号必须是字母;其余符号可以是字母、数字几及下划线;程序名最多有24个字符;字符间不允许有分隔符。
SIEMENS 802D数控系统常用G代码:1.2.1 G00快速定位指令格式:G00 Xxx Yxx ZxxXxx Yxx Zxx ——直角坐标系中的终点坐标;编程示例(图1—1)Y)0 X图1—1N10 G00 G90 X0 Y0N20 G00 X200 Y200G00 指令的运动速度为机床的快速定位速度(机床允许的最大运动速度)G00的速度由机床参数设定。
G00快速移动功能不能用于工件切削加工,只能用于空行程进给,一般用于接近起始位置或换刀点、退刀等。
1.2.2 G01 直线插补指令格式:G01 Xxx Yxx Zxx FxxXxx Yxx Zxx ——直角坐标系中的终点坐标;Fxx ——进给率单位mm/min。
编程示例(图1—2)YX图1—2N10 G00 G90 X0 Y0N20 G01 X150 Y200 F300G01指令规定的进给速度可以由面板上的进给倍率开关进行修调,此功能一般用于工件切削,切削的进给速度由F值指定。
SIEMENS系统数控加工中心编程基础
SIEMENS系统数控加⼯中⼼编程基础▼⽬录1.平⾯的选择:G17、G18、G191)指令功能① 确定圆弧插补平⾯,并影响圆弧插补时圆弧⽅向(顺时针和逆时针)的定义。
② 确定⼑具半径补偿的坐标平⾯。
③ 确定⼑具长度补偿的坐标轴。
④ 影响倒⾓、倒圆指令的坐标平⾯。
2)指令格式G17:XY平⾯选择G18:ZX平⾯选择G19:YZ平⾯选择3)使⽤说明指令对应地平⾯横、纵坐标轴和垂直坐标轴如表所⽰。
4)编程举例N10 G170 T_D_M_; 选择X/Y平⾯N20 _X_Y_Z_; Z轴⽅向上⼑具长度补偿2.绝对的增量位置数据G90、G911)指令功能确定当前尺⼨数据的类型2)指令格式G90:绝对尺⼨【图a】G91:增量尺⼨【图b】3)使⽤说明① G90和G91指令分别对应着绝对位置数据输⼊和增量位置数据输⼊。
其中G90表⽰坐标系中⽬标点的坐标尺⼨,G91表⽰待运⾏的位移量。
G9、G91适⽤于所有坐标轴。
② 程序启动后G90适⽤于所有坐标轴,并且⼀直有效,直到后⾯的程序段中由G91(增量位置输⼊)代替为⽌(模态有效),反之也相同,即G90和G91为同组的模态G指令。
③ 绝对位置数据输⼊中尺⼨取决于当前坐标系(⼯件坐标系或机床坐标系)的零点位置。
零点偏置有以下⼏种情况:可编程零点偏置,可设定零点偏置或没有零点偏置。
④ 机床启动后的基本状态可由机床数据设定,⼀般为G90状态。
4)G90和G91应⽤举例N10 G90 X20 Z90; 绝对尺⼨N20 X75 Z-32; 仍然是绝对尺⼨…N180 G91 X40 Z20; 转换为增量尺⼨N190 X-12 Z17; 仍然为增量尺⼨3.公制尺⼨/英制尺⼨1)指令功能设定尺⼨单位。
2)指令格式G70:英制尺⼨G71:公制尺⼨3)使⽤说明4)编程举例N10 G70 X10 Z30; 英制尺⼨N20 X40 Z50; G70继续有效…N80 G71 X19 Z17.3; 开始公制尺⼨4.可设定的零点偏置G54~595.辅助功能——M指令辅助功能指令是控制机床“开——关”功能的指令,主要⽤于完成机床加⼯时的辅助⼯作和状态控制。
西门子G代码、M代码

G46刀具偏置+/-
G47刀具偏置-/-
G48刀具偏置-/+
G45刀具偏置+/+
G49刀具偏置0/+
G50刀具偏置0/-
G51刀具偏置+/0
G52刀具偏置-/0
G53刀具偏移注销
G54直线偏移X
G55直线偏移Y
G56直线偏移Z
G57直线偏移XY
G58直线偏移XZ
G59直线偏移YZ
M51 4号冷却液开
M52-54不指定
M55
M56
M57-59
M60
M61
M62
M63-70
M71
M72
M73-89
M90-99刀具直线位移,位置1
刀具直线位移,位置2
不指定
更换工作
工件直线位移,位置1
工件直线位移,位置2
不指定
工件角度位移,位置1
工件角度位移,位置2
不指定
永不指定
G60准确定位1(精)
G61准确定位2(中)
G62准确定位3(粗)
G63攻螺纹
G64-67不指定
G68刀具偏置,内角
G69刀具偏置,外角
G70-G79不指定
G80固定循环注销
G81-G89固定循环
G90绝对尺寸
G91增量尺寸
G92预置寄存
G93时间倒数,进给率
G94每分钟进给
G95主轴每转进给
G96恒线速度
M15正运动
M16负运动
M17,M18不指定
M19主轴定向停止
M20-29永不指定
M30纸带结束
M31互锁旁路
SINUMERIK 828D基本编程指令
$P_UIFR[1,X,TR]=10 $P_UIFR[1,Y,TR]=20 $P_UIFR[1,Z,TR]=30
参数解释:
“1”: 表示修改G54中的坐标; “X”: 表示修改X轴的坐标; “TR”:标示修改零偏值。
角度编程指令:ANG
独特的编程指 令
N10 G1 X1 Z1 N20 X2 ANG=…
或者:N10 G1 X1 Z1 N20 Z2 ANG=…
外側拐角方式: G450 / G451
独特的编程指 令
(在刀具半径补偿方式下)
圆弧进给速率修调:CFC / CFTCP/CFIN
独特的编程指 令
根据刀具半径值调整刀具中心轨迹的速度,使刀具边 沿与工件之间的相对运动的速度保持在编程的F值。
种类齐全的数学运算的功能
包括普通的“+”、“-”、“×”(*)、“/”四则运算。平方: POT()、开方:SQRT()、指数:EXP()、自然对数:LN ()、三角函数:SIN(),COS(),TAN()和反三角函数: ASIN(),ACOS()ATAN2(…,…)等数学运算功能。
数学和逻辑运 算功能
三点圆弧是西门子数控系统一种独特的圆弧插补方式。与其它几种 圆弧插补方式相比,这是唯一一种摆脱了平面选择(G17、G18、G19)束 缚的真正的空间圆弧插补。
圆弧段 给定的刀轨迹
折线段
误差带
插补类型 直线 圆弧
指令 G01 X Y Z CIP X Y Z I1= J1= K1=
程序段数 10 blocks
内圆弧加工: F中心=F编程(R轮廓-R刀具)/R轮廓
外圆弧加工: F中心=F编程(R轮廓+R刀具)/R轮廓
西门子G代码
不带补偿夹具切削内螺纹. 退刀
G332 Z…K…;不带补偿夹具切削螺纹. Z退刀 ;螺距符号同G331
CT
带切线的过渡圆弧插补
N10…
N20 CT Z…X…F. 圆弧以前一段切线为过渡.
G4
快速移动
2: 特殊运行,程序段方式有效
G4 F…或G4 S….;自身程序段
G63
快速移动
G63 Z…F…S…M…
FFOWF
预控关闭
预控
模态有效
FFOWN*
预控打开
WALIMON*
工作区域限制生效
工作区域限制
模态有效
适用于所有轴,通过设定数据激活;值通过G25,G26设置
WALIMOF
工作区域限制取消
G920*
西门子方式
其它NC语言
G921
其它方式
模态有效
带* 的功能在程序启动时生效(如果没有编程新的内容,指用于“铣削”时的系统变量).
附加可编程镜像功能
AMIRROR X0 改变方向的坐标轴,自身程序段
G25
主轴转速下限
G25S…;自身程序段 G25 X…Z…;自身程序段
G26
主轴转速上限
G26S…;自身程序段G26 X…Z…;自身程序段
G17
(在加工中心孔时要求)
6: 平面选择
G17…所在平面的垂直轴为刀具长度补偿轴
G18*
Z/X平面
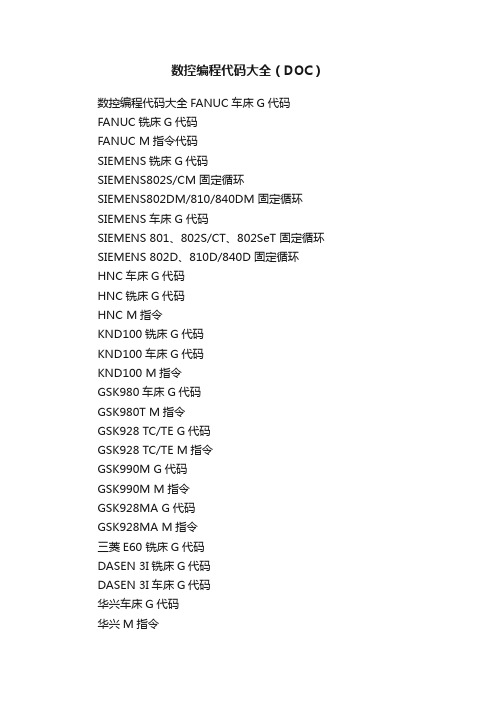
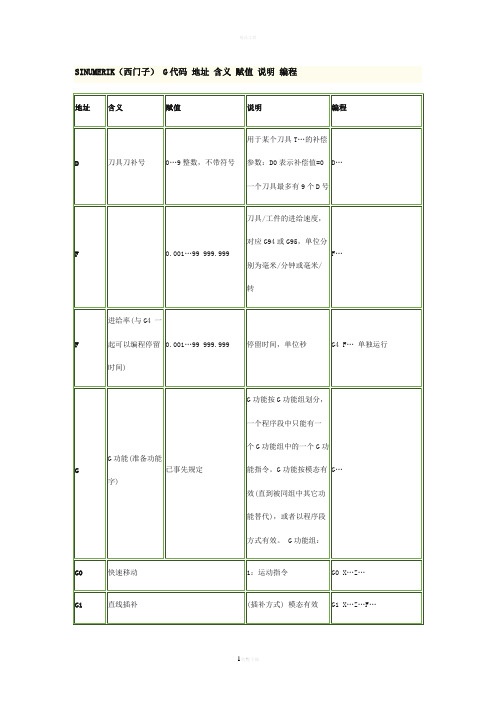
SINUMERIK(西门子) G代码 地址 含义 赋值 说明 编程
地址
含义
赋值
说明
编程
D
刀具刀补号
0…9整数,不带符号
用于某个刀具T…的补偿参数:D0表示补偿值=0一个刀具最多有9个D号
SIEMENS数控系统代码之欧阳语创编

SIEMENS铣床 G代码D 刀具刀补号F 进给率(与G4 一起可以编程停留时间)G G功能(准备功能字)G0 快速移动G1 直线插补G2 顺时针圆弧插补G3 逆时针圆弧插补CIP 中间点圆弧插补G33恒螺距的螺纹切削G331 不带补偿夹具切削内螺纹G332 不带补偿夹具切削内螺纹. 退刀CT 带切线的过渡圆弧插补G4 快速移动G63快速移动G74 回参考点G75 回固定点G25 主轴转速下限G26 主轴转速上限G110 极点尺寸,相对于上次编程的设定位置G110 极点尺寸,相对于当前工件坐标系的零点G120 极点尺寸,相对于上次有效的极点G17* X/Y平面G18Z/X平面G19 Y/Z平面G40 刀尖半径补偿方式的取消G41 调用刀尖半径补偿, 刀具在轮廓左侧移动G42 调用刀尖半径补偿, 刀具在轮廓右侧移动G500 取消可设定零点偏置G54 第一可设定零点偏置G55 第二可设定零点偏置G56 第三可设定零点偏置G57 第四可设定零点偏置G58 第五可设定零点偏置G59 第六可设定零点偏置G53 按程序段方式取消可设定零点偏置G60* 准确定位G70 英制尺寸G71* 公制尺寸G700 英制尺寸,也用于进给率F G710公制尺寸,也用于进给率F G90* 绝对尺寸G91 增量尺寸G94* 进给率F,单位毫米/分G95 主轴进给率F,单位毫米/转G901 在圆弧段进给补偿“开”G900 进给补偿“关”G450 圆弧过渡G451 等距线的交点I插补参数J 插补参数K 插补参数I1 圆弧插补的中间点J1 圆弧插补的中间点K1 圆弧插补的中间点L 子程序名及子程序调用M 辅助功能M0 程序停止M1 程序有条件停止M2程序结束M3 主轴顺时针旋转M4 主轴逆时针旋转M5 主轴停M6 更换刀具N 副程序段: 主程序段P 子程序调用次数RET 子程序结束S 主轴转速,在G4 中表示暂停时间T 刀具号X 坐标轴Y 坐标轴Z 坐标轴CALL 循环调用CHF 倒角,一般使用CHR 倒角轮廓连线CR圆弧插补半径GOTOB 向后跳转指令GOTOF 向前跳转指令RND 圆角SIEMENS车床 G 代码D 刀具刀补号FF 进给率(与G4 一起可以编程停留时间)G G功能(准备功能字)G0 快速移动G1 直线插补G2 顺时针圆弧插补G3 逆时针园弧插补G33 恒螺距的螺纹切削G4 快速移动G63 快速移动G74 回参考点G75 回固定点G17 (在加工中心孔时要求)G18* Z/X平面G40 刀尖半径补偿方式的取消G41 调用刀尖半径补偿, 刀具在轮廓左侧移动G42 调用刀尖半径补偿, 刀具在轮廓右侧移动G500 取消可设定零点偏置G54 第一可设定零点偏置G55 第二可设定零点偏置G56 第三可设定零点偏置G57 第四可设定零点偏置G58 第五可设定零点偏置G59 第六可设定零点偏置G53 按程序段方式取消可设定零点偏置G70 英制尺寸G71* 公制尺寸G90* 绝对尺寸G91 增量尺寸G94* 进给率F,单位毫米/分G95 主轴进给率F,单位毫米/转I 插补参数I1 圆弧插补的中间点K1 圆弧插补的中间点L 子程序名及子程序调用M 辅助功能M0 程序停止M1 程序有条件停止M2 程序结束M30M17 M3 主轴顺时针旋转M4 主轴逆时针旋转M5 主轴停M6 更换刀具N 副程序段: 主程序段P 子程序调用次数RET 子程序结束S 主轴转速,在G4 中表示暂停时间T 刀具号X 坐标轴Y 坐标轴Z 坐标轴AR 圆弧插补张角CALL 循环调用CHF 倒角,一般使用CHR 倒角轮廓连线CR 圆弧插补半径GOTOB 向后跳转指令GOTOF 向前跳转指令RND 圆角SIEMENS802S/CM 固定循环LCYC82钻削,沉孔加工LCYC83深孔钻削LCYC840带补偿夹具的螺纹切削LCYC84不带补偿夹具的螺纹切削LCYC85镗孔LCYC60线性孔排列LCYC61圆弧孔排列LCYC75矩形槽,键槽,圆形凹槽铣削SIEMENS802DM/810/840DM 固定循环CYCLE82中心钻孔CYCLE83深孔钻削CYCLE84性攻丝CYCLE85铰孔CYCLE86镗孔CYCLE88带停止镗孔CYCLE71端面铣削LONGHOLE 一个圆弧上的长方形孔POCKET4环形凹槽铣削POCKET3矩形凹槽铣削SLOT1一个圆弧上的键槽SLOT2环行槽SIEMENS802DM/810/840DM 固定循环CYCLE82中心钻孔CYCLE83深孔钻削CYCLE84性攻丝CYCLE85铰孔CYCLE86镗孔CYCLE88带停止镗孔CYCLE71端面铣削LONGHOLE 一个圆弧上的长方形孔POCKET4环形凹槽铣削POCKET3矩形凹槽铣削SLOT1一个圆弧上的键槽SLOT2环行槽SIEMENS 801、802S/CT、 802SeT 固定循环LCYC82 钻削,沉孔加工LCYC83 深孔钻削LCYC840 带补偿夹具的螺纹切削LCYC84 不带补偿夹具的螺纹切削LCYC85 镗孔LCYC93切槽循环LCYC95 毛坯切削循环LCYC97 螺纹切削SIEMENS 802D、810D/840D 固定循环CYCLE71平面铣削CYCLE82中心钻孔YCLE83深孔钻削CYCLE84刚性攻丝CYCLE85铰孔CYCLE86镗孔CYCLE88带停止镗孔CYCLE93切槽CYCLE94退刀槽形状E..F CYCLE95毛坯切削CYCLE97螺纹切削。
SINUMERIK 828D基本编程指令
变量的应用
系统变量的应用
系统变量中存储着系统状态的信息。由于系统变量数目非常 庞大在此仅对工件原点和刀具参数的相关内容进行简要介绍。
通常工件原点G54~G57的数值都是从控制面板上直接输入, 但是通过给相应的系统变量赋值,也可以在NC程序中直接修 改工件零偏 。具体的变量名对应如下:$P_UIFR[0] 对应 G500;$P_UIFR[1] 对应G54;$P_UIFR[2] 对应G55; $P_UIFR[3] 对应G56;$P_UIFR[4] 对应G57。
子程序调用必须在单独的程序段内,连续调用次数用参 数P表示,例如:WE100 P3
程序跳步符号:/,例如:/G0 X100 Y0
强大的编程功能
独特的编程指 令
SINUMERIK 数控系统为手工编程提供了丰富多样的编 程指令,满足各种类型常规零件的加工需求。
除了标准G代码指令以外,西门子系统还提供了大量 功能独到的特殊功能代码,方便了手工编程的工作。
独特的编程指 令
多种形式的圆弧插补指令给你更多圆弧编程方式的选择
除了常用的 “终点+圆心” 形式,以及 “终点+半径” (此处半径用CR=…表示) 形式的圆弧插补方式以外,西门子系统还特别提供了以下几种圆弧插补的编程方法: “终点+圆心角”、“圆心+圆心角”、“极坐标”、CIP。
CIP圆弧插补
独特的编程指 令
TURN=…整圆的圈数。 确切的表达应为: 圆弧经过起点的次数。
多种简化轨迹计算的编程指令
独特的编程指 令
在直线与圆弧轨迹之间进行交接的时候,无论是相交还是相切都涉及到大 量而繁琐的计算,使用下文所述的西门子数控系统所特有的功能指令, 则可以极大地简化手工编程过程中人工计算的工作量。
sinumerik数控编程指令高级讲解
sinumerik数控编程指令高级讲解Sinumerik是西门子公司的数控系统,广泛应用于各类数控机床。
在数控编程中,掌握高级编程指令能够有效提高编程效率和加工精度。
本文将对Sinumerik数控编程中的高级指令进行详细讲解,帮助读者深入理解和运用这些指令。
一、循环指令1.MOD:模数循环指令,用于实现固定循环的多次执行。
语法:MOD [循环次数]示例:MOD 5含义:执行5次固定循环。
2.WHILE-ENDWH:条件循环指令,根据指定条件重复执行循环体内的指令。
语法:WHILE 条件...ENDWH示例:WHILE [I] <= 10...ENDWH含义:当变量I的值小于等于10时,重复执行循环体内的指令。
二、数组指令1.DIM:定义数组指令,用于定义一个数组。
语法:DIM [数组名]([维数])示例:DIM TABLE(10)含义:定义一个名为TABLE的一维数组,包含10个元素。
2.INDEX:数组索引指令,用于访问数组元素。
语法:[数组名](INDEX)示例:TABLE(INDEX)含义:访问数组TABLE的当前元素。
三、子程序调用指令1.CALL:调用子程序指令,用于调用已定义的子程序。
语法:CALL [子程序名]示例:CALL SUB1含义:调用名为SUB1的子程序。
2.RETURN:子程序返回指令,用于从子程序返回到主程序。
语法:RETURN示例:RETURN含义:从当前子程序返回到主程序。
四、其他高级指令1.IF-THEN-ELSE-ENDIF:条件判断指令,根据条件执行不同路径的指令。
语法:IF 条件THEN...ELSE...ENDIF示例:IF [I] > 10 THEN...ELSE...ENDIF含义:如果变量I的值大于10,执行第一个路径的指令;否则,执行第二个路径的指令。
2.PAUSE:暂停指令,用于暂停程序的执行。
语法:PAUSE [时间]示例:PAUSE 5含义:暂停5秒。
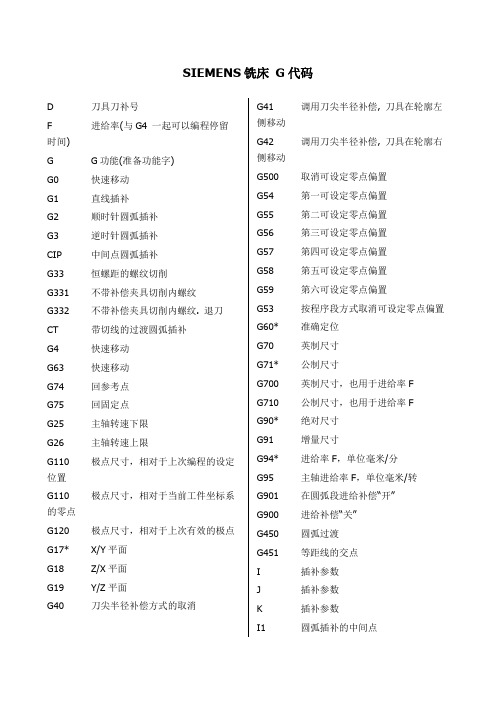
SIEMENS数控系统代码

SIEMENS铣床G代码D 刀具刀补号F 进给率(与G4 一起可以编程停留时间)G G功能(准备功能字)G0 快速移动G1 直线插补G2 顺时针圆弧插补G3 逆时针圆弧插补CIP 中间点圆弧插补G33 恒螺距的螺纹切削G331 不带补偿夹具切削内螺纹G332 不带补偿夹具切削内螺纹. 退刀CT 带切线的过渡圆弧插补G4 快速移动G63 快速移动G74 回参考点G75 回固定点G25 主轴转速下限G26 主轴转速上限G110 极点尺寸,相对于上次编程的设定位置G110 极点尺寸,相对于当前工件坐标系的零点G120 极点尺寸,相对于上次有效的极点G17* X/Y平面G18 Z/X平面G19 Y/Z平面G40 刀尖半径补偿方式的取消G41 调用刀尖半径补偿, 刀具在轮廓左侧移动G42 调用刀尖半径补偿, 刀具在轮廓右侧移动G500 取消可设定零点偏置G54 第一可设定零点偏置G55 第二可设定零点偏置G56 第三可设定零点偏置G57 第四可设定零点偏置G58 第五可设定零点偏置G59 第六可设定零点偏置G53 按程序段方式取消可设定零点偏置G60* 准确定位G70 英制尺寸G71* 公制尺寸G700 英制尺寸,也用于进给率FG710 公制尺寸,也用于进给率FG90* 绝对尺寸G91 增量尺寸G94* 进给率F,单位毫米/分G95 主轴进给率F,单位毫米/转G901 在圆弧段进给补偿“开”G900 进给补偿“关”G450 圆弧过渡G451 等距线的交点I 插补参数J 插补参数K 插补参数I1 圆弧插补的中间点J1 圆弧插补的中间点K1 圆弧插补的中间点L 子程序名及子程序调用M 辅助功能M0 程序停止M1 程序有条件停止M2 程序结束M3 主轴顺时针旋转M4 主轴逆时针旋转M5 主轴停M6 更换刀具N 副程序段: 主程序段P 子程序调用次数RET 子程序结束S 主轴转速,在G4 中表示暂停时间T 刀具号X 坐标轴Y 坐标轴Z 坐标轴CALL 循环调用CHF 倒角,一般使用CHR 倒角轮廓连线CR 圆弧插补半径GOTOB 向后跳转指令GOTOF 向前跳转指令RND 圆角SIEMENS车床 G 代码D 刀具刀补号FF 进给率(与G4 一起可以编程停留时间)G G功能(准备功能字)G0 快速移动G1 直线插补G2 顺时针圆弧插补G3 逆时针园弧插补G33 恒螺距的螺纹切削G4 快速移动G63 快速移动G74 回参考点G75 回固定点G17 (在加工中心孔时要求)G18* Z/X平面G40 刀尖半径补偿方式的取消G41 调用刀尖半径补偿, 刀具在轮廓左侧移动G42 调用刀尖半径补偿, 刀具在轮廓右侧移动G500 取消可设定零点偏置G54 第一可设定零点偏置G55 第二可设定零点偏置G56 第三可设定零点偏置G57 第四可设定零点偏置G58 第五可设定零点偏置G59 第六可设定零点偏置G53 按程序段方式取消可设定零点偏置G70 英制尺寸G71* 公制尺寸G90* 绝对尺寸G91 增量尺寸G94* 进给率F,单位毫米/分G95 主轴进给率F,单位毫米/转I 插补参数I1 圆弧插补的中间点K1 圆弧插补的中间点L 子程序名及子程序调用M 辅助功能M0 程序停止M1 程序有条件停止M2 程序结束M30M17 M3 主轴顺时针旋转M4 主轴逆时针旋转M5 主轴停M6 更换刀具N 副程序段: 主程序段P 子程序调用次数RET 子程序结束S 主轴转速,在G4 中表示暂停时间T 刀具号X 坐标轴Y 坐标轴Z 坐标轴AR 圆弧插补张角CALL 循环调用CHF 倒角,一般使用CHR 倒角轮廓连线CR 圆弧插补半径GOTOB 向后跳转指令GOTOF 向前跳转指令RND 圆角SIEMENS802S/CM 固定循环LCYC82 钻削,沉孔加工LCYC83 深孔钻削LCYC840 带补偿夹具的螺纹切削LCYC84 不带补偿夹具的螺纹切削LCYC85 镗孔LCYC60 线性孔排列LCYC61 圆弧孔排列LCYC75 矩形槽,键槽,圆形凹槽铣削SIEMENS802DM/810/840DM 固定循环CYCLE82 中心钻孔CYCLE83 深孔钻削CYCLE84 性攻丝CYCLE85 铰孔CYCLE86 镗孔CYCLE88 带停止镗孔CYCLE71 端面铣削LONGHOLE 一个圆弧上的长方形孔POCKET4 环形凹槽铣削POCKET3 矩形凹槽铣削SLOT1 一个圆弧上的键槽SLOT2 环行槽SIEMENS802DM/810/840DM 固定循环CYCLE82 中心钻孔CYCLE83 深孔钻削CYCLE84 性攻丝CYCLE85 铰孔CYCLE86 镗孔CYCLE88 带停止镗孔CYCLE71 端面铣削LONGHOLE 一个圆弧上的长方形孔POCKET4 环形凹槽铣削POCKET3 矩形凹槽铣削SLOT1 一个圆弧上的键槽SLOT2 环行槽SIEMENS 801、802S/CT、 802SeT 固定循环LCYC82 钻削,沉孔加工LCYC83 深孔钻削LCYC840 带补偿夹具的螺纹切削LCYC84 不带补偿夹具的螺纹切削LCYC85 镗孔LCYC93 切槽循环LCYC95 毛坯切削循环LCYC97 螺纹切削SIEMENS 802D、810D/840D 固定循环CYCLE71 平面铣削CYCLE82 中心钻孔YCLE83 深孔钻削CYCLE84 刚性攻丝CYCLE85 铰孔CYCLE86 镗孔CYCLE88 带停止镗孔CYCLE93 切槽CYCLE94 退刀槽形状E..F CYCLE95 毛坯切削CYCLE97 螺纹切削。
西门子数控指令编程代码

西门子数控编程指令代码含义SIEMENS铣床 G代码地址含义D刀具刀补号F进给率(与G4 一起可以编程停留时间)GG功能(准备功能字)G0快速移动G1直线插补G2顺时针圆弧插补G3逆时针圆弧插补CIP中间点圆弧插补G33恒螺距的螺纹切削G331不带补偿夹具切削内螺纹G332不带补偿夹具切削内螺纹. 退刀CT带切线的过渡圆弧插补G4快速移动G63快速移动G74回参考点G75回固定点G25主轴转速下限G26主轴转速上限G110极点尺寸,相对于上次编程的设定位置G110极点尺寸,相对于当前工件坐标系的零点G120极点尺寸,相对于上次有效的极点G17*X/Y平面G18Z/X平面G19Y/Z平面G40刀尖半径补偿方式的取消G41调用刀尖半径补偿, 刀具在轮廓左侧移动G42调用刀尖半径补偿, 刀具在轮廓右侧移动G500取消可设定零点偏置G54第一可设定零点偏置G55第二可设定零点偏置G56第三可设定零点偏置G57第四可设定零点偏置G58第五可设定零点偏置G59第六可设定零点偏置G53按程序段方式取消可设定零点偏置G60*准确定位G70英制尺寸G71*公制尺寸G700英制尺寸,也用于进给率FG710公制尺寸,也用于进给率FG90*绝对尺寸G91增量尺寸G94*进给率F,单位毫米/分G95主轴进给率F,单位毫米/转G901在圆弧段进给补偿“开”G900进给补偿“关”G450圆弧过渡G451等距线的交点I插补参数J插补参数K插补参数I1圆弧插补的中间点J1圆弧插补的中间点K1圆弧插补的中间点L子程序名及子程序调用M辅助功能M0程序停止M1程序有条件停止M2程序结束M3主轴顺时针旋转M4主轴逆时针旋转M5主轴停M6更换刀具N副程序段:主程序段P子程序调用次数RET子程序结束S主轴转速,在G4 中表示暂停时间T刀具号X坐标轴Y坐标轴Z坐标轴CALL循环调用CHF倒角,一般使用CHR倒角轮廓连线CR圆弧插补半径GOTOB向后跳转指令GOTOF向前跳转指令RND圆角支持参数编程SIEMENS802S/CM 固定循环循环说明LCYC82钻削,沉孔加工LCYC83深孔钻削LCYC840带补偿夹具的螺纹切削LCYC84不带补偿夹具的螺纹切削LCYC85镗孔LCYC60线性孔排列LCYC61圆弧孔排列LCYC75矩形槽,键槽,圆形凹槽铣削SIEMENS802DM/810/840DM 固定循环循环说明CYCLE82中心钻孔CYCLE83深孔钻削CYCLE84性攻丝CYCLE85铰孔CYCLE86镗孔CYCLE88带停止镗孔CYCLE71端面铣削LONGHOLE一个圆弧上的长方形孔POCKET4环形凹槽铣削POCKET3矩形凹槽铣削SLOT1一个圆弧上的键槽SLOT2环行槽SIEMENS车床 G 代码地址含义D刀具刀补号FF进给率(与G4 一起可以编程停留时间)GG功能(准备功能字)G0快速移动G1直线插补G2顺时针圆弧插补G3逆时针园弧插补G33恒螺距的螺纹切削G4快速移动G63快速移动G74回参考点G75回固定点G17(在加工中心孔时要求)G18*Z/X平面G40刀尖半径补偿方式的取消G41调用刀尖半径补偿, 刀具在轮廓左侧移动G42调用刀尖半径补偿, 刀具在轮廓右侧移动G500取消可设定零点偏置G54第一可设定零点偏置G55第二可设定零点偏置G56第三可设定零点偏置G57第四可设定零点偏置G58第五可设定零点偏置G59第六可设定零点偏置G53按程序段方式取消可设定零点偏置G70英制尺寸G71*公制尺寸G90*绝对尺寸G91增量尺寸G94*进给率F,单位毫米/分G95主轴进给率F,单位毫米/转I插补参数I1圆弧插补的中间点K1圆弧插补的中间点L子程序名及子程序调用M辅助功能M0程序停止M1程序有条件停止M2程序结束M30M17M3主轴顺时针旋转M4主轴逆时针旋转M5主轴停M6更换刀具N副程序段:主程序段P子程序调用次数RET子程序结束S主轴转速,在G4 中表示暂停时间T刀具号X坐标轴Y坐标轴Z坐标轴AR圆弧插补张角CALL循环调用CHF倒角,一般使用CHR倒角轮廓连线CR圆弧插补半径GOTOB向后跳转指令GOTOF向前跳转指令RND圆角支持参数编程SIEMENS 801、802S/CT、 802SeT 固定循环循环说明LCYC82钻削,沉孔加工LCYC83深孔钻削LCYC840带补偿夹具的螺纹切削LCYC84不带补偿夹具的螺纹切削LCYC85镗孔LCYC93切槽循环LCYC95毛坯切削循环LCYC97螺纹切削SIEMENS 802D、810D/840D 固定循环循环说明CYCLE71平面铣削CYCLE82中心钻孔YCLE83深孔钻削CYCLE84刚性攻丝CYCLE85铰孔CYCLE86镗孔CYCLE88带停止镗孔CYCLE93切槽CYCLE94退刀槽形状E..FCYCLE95毛坯切削CYCLE97螺纹切削。
西门子G代码、M代码
G98,G99不指定
M指令如下:
M00程序停止
M01计划停止
M02程序结束
M03主轴顺时针方向
M04主轴逆时针方向
M05主轴停止
M06换刀
M07 2号冷却液开
M08 1号冷却液开
M09冷却液关
M10夹紧
M11松开
M12不指定
M13主轴顺时针方向冷却液开
M14主轴逆时针方向冷却液开
G45刀具偏置+/+
G46刀具偏置+/-
G47刀具偏置-/-
G48刀具偏置-/+
G45刀具偏置+/+
G49刀具偏置0/+
G50刀具偏置0/-
G51刀具偏置+/0
G52刀具偏置-/0
G53刀具偏移注销
G54直线偏移X
G55直线偏移Y
G56直线偏移ZG57Fra bibliotek线偏移XYG58直线偏移XZ
G59直线偏移YZ
G08加速
G09减速
G10-16不指定
G17 XY平面选择
G18 XZ平面选择
G19 YZ平面选择
G20-32不指定
G33螺纹切削,等螺距
G34螺纹切削,增螺距
G35螺纹切削,减螺距
G36-39不指定
G40刀具补偿(刀具偏置注销)
G41刀具左补偿
G42刀具右补偿
G43刀具偏置(正)
G44刀具偏置(负)
M15正运动
M16负运动
M17,M18不指定
M19主轴定向停止
M20-29永不指定
M30纸带结束
M31互锁旁路
M32-35不指定
SIEMENS数控系统代码
SIEMENS铣床G代码D 刀具刀补号F 进给率(与G4 一起可以编程停留时间)G G功能(准备功能字)G0 快速移动G1 直线插补G2 顺时针圆弧插补G3 逆时针圆弧插补CIP 中间点圆弧插补G33 恒螺距的螺纹切削G331 不带补偿夹具切削内螺纹G332 不带补偿夹具切削内螺纹. 退刀CT 带切线的过渡圆弧插补G4 快速移动G63 快速移动G74 回参考点G75 回固定点G25 主轴转速下限G26 主轴转速上限G110 极点尺寸,相对于上次编程的设定位置G110 极点尺寸,相对于当前工件坐标系的零点G120 极点尺寸,相对于上次有效的极点G17* X/Y平面G18 Z/X平面G19 Y/Z平面G40 刀尖半径补偿方式的取消G41 调用刀尖半径补偿, 刀具在轮廓左侧移动G42 调用刀尖半径补偿, 刀具在轮廓右侧移动G500 取消可设定零点偏置G54 第一可设定零点偏置G55 第二可设定零点偏置G56 第三可设定零点偏置G57 第四可设定零点偏置G58 第五可设定零点偏置G59 第六可设定零点偏置G53 按程序段方式取消可设定零点偏置G60* 准确定位G70 英制尺寸G71* 公制尺寸G700 英制尺寸,也用于进给率FG710 公制尺寸,也用于进给率FG90* 绝对尺寸G91 增量尺寸G94* 进给率F,单位毫米/分G95 主轴进给率F,单位毫米/转G901 在圆弧段进给补偿“开”G900 进给补偿“关”G450 圆弧过渡G451 等距线的交点I 插补参数J 插补参数K 插补参数I1 圆弧插补的中间点J1 圆弧插补的中间点K1 圆弧插补的中间点L 子程序名及子程序调用M 辅助功能M0 程序停止M1 程序有条件停止M2 程序结束M3 主轴顺时针旋转M4 主轴逆时针旋转M5 主轴停M6 更换刀具N 副程序段: 主程序段P 子程序调用次数RET 子程序结束S 主轴转速,在G4 中表示暂停时间T 刀具号X 坐标轴Y 坐标轴Z 坐标轴CALL 循环调用CHF 倒角,一般使用CHR 倒角轮廓连线CR 圆弧插补半径GOTOB 向后跳转指令GOTOF 向前跳转指令RND 圆角SIEMENS车床G 代码D 刀具刀补号FF 进给率(与G4 一起可以编程停留时间)G G功能(准备功能字)G0 快速移动G1 直线插补G2 顺时针圆弧插补G3 逆时针园弧插补G33 恒螺距的螺纹切削G4 快速移动G63 快速移动G74 回参考点G75 回固定点G17 (在加工中心孔时要求)G18* Z/X平面G40 刀尖半径补偿方式的取消G41 调用刀尖半径补偿, 刀具在轮廓左侧移动G42 调用刀尖半径补偿, 刀具在轮廓右侧移动G500 取消可设定零点偏置G54 第一可设定零点偏置G55 第二可设定零点偏置G56 第三可设定零点偏置G57 第四可设定零点偏置G58 第五可设定零点偏置G59 第六可设定零点偏置G53 按程序段方式取消可设定零点偏置G70 英制尺寸G71* 公制尺寸G90* 绝对尺寸G91 增量尺寸G94* 进给率F,单位毫米/分G95 主轴进给率F,单位毫米/转I 插补参数I1 圆弧插补的中间点K1 圆弧插补的中间点L 子程序名及子程序调用M 辅助功能M0 程序停止M1 程序有条件停止M2 程序结束M30M17 M3 主轴顺时针旋转M4 主轴逆时针旋转M5 主轴停M6 更换刀具N 副程序段: 主程序段P 子程序调用次数RET 子程序结束S 主轴转速,在G4 中表示暂停时间T 刀具号X 坐标轴Y 坐标轴Z 坐标轴AR 圆弧插补张角CALL 循环调用CHF 倒角,一般使用CHR 倒角轮廓连线CR 圆弧插补半径GOTOB 向后跳转指令GOTOF 向前跳转指令RND 圆角SIEMENS802S/CM 固定循环LCYC82 钻削,沉孔加工LCYC83 深孔钻削LCYC840 带补偿夹具的螺纹切削LCYC84 不带补偿夹具的螺纹切削LCYC85 镗孔LCYC60 线性孔排列LCYC61 圆弧孔排列LCYC75 矩形槽,键槽,圆形凹槽铣削SIEMENS802DM/810/840DM 固定循环CYCLE82 中心钻孔CYCLE83 深孔钻削CYCLE84 性攻丝CYCLE85 铰孔CYCLE86 镗孔CYCLE88 带停止镗孔CYCLE71 端面铣削LONGHOLE 一个圆弧上的长方形孔POCKET4 环形凹槽铣削POCKET3 矩形凹槽铣削SLOT1 一个圆弧上的键槽SLOT2 环行槽SIEMENS802DM/810/840DM 固定循环CYCLE82 中心钻孔CYCLE83 深孔钻削CYCLE84 性攻丝CYCLE85 铰孔CYCLE86 镗孔CYCLE88 带停止镗孔CYCLE71 端面铣削LONGHOLE 一个圆弧上的长方形孔POCKET4 环形凹槽铣削POCKET3 矩形凹槽铣削SLOT1 一个圆弧上的键槽SLOT2 环行槽SIEMENS 801、802S/CT、802SeT 固定循环LCYC82 钻削,沉孔加工LCYC83 深孔钻削LCYC840 带补偿夹具的螺纹切削LCYC84 不带补偿夹具的螺纹切削LCYC85 镗孔LCYC93 切槽循环LCYC95 毛坯切削循环LCYC97 螺纹切削SIEMENS 802D、810D/840D 固定循环CYCLE71 平面铣削CYCLE82 中心钻孔YCLE83 深孔钻削CYCLE84 刚性攻丝CYCLE85 铰孔CYCLE86 镗孔CYCLE88 带停止镗孔CYCLE93 切槽CYCLE94 退刀槽形状E..F CYCLE95 毛坯切削CYCLE97 螺纹切削。
SINUMERIK 828D基本编程指令

Slide 6
极坐标编程指令:
Automation and Drives
SINUMERIK
独独特特的的编编程程指 令指令
丰富多样的加 工循环
对于围绕某一个中心点,并且按照一定的半径尺寸进行分布的轮廓,用极 坐标描述坐标点的位置更为直接,更加方便。
定义极点: G110 以刀具当前点位置为基准 G111 以当前工件原点为基准 G112 以当前极点为基准
圆弧段 给定的刀轨迹
折线段
数学和逻辑运 算功能
变量的应用
插补类型 直线 圆弧
误差带
指令 G01 X Y Z CIP X Y Z I1= J1= K1=
程序段数 10 blocks
5 blocks
CAM软件可以充分利用这一功能对NC程序进行优化,以空间圆弧段取代空间直 线段来逼近空间曲线。
Slide 9
SINUMERIK
独独特特的的编编程程指 令指令
COMPCAD指令在指定的公差范围 内将CAM软件生成的G01线段转换 为样条曲线,并由系统直接运行。
P2
丰富多样的加
工循环
P1
数学和逻辑运 算功能
变量的应用
弦差
Chordal Error
P3
理想刀路 Ideal Cutter Path 公差带 Tolerance Band 直线刀路 Linear Cutter Path 样条轨迹 spline path
CIP圆弧插补
SINUMERIK
独独特特的的编编程程指 令指令
丰富多样的加 工循环
数学和逻辑运 算功能
变量的应用
Automation and Drives Slide 10
螺旋插补
Automation and Drives
西门子数控机床操作及编程

CYCLE94 ★
退刀槽(E型和F型)切削
LCYC94 ☆
CYCLE95 ★
毛坯切削
LCYC95 ☆
CYCLE97 ★
螺纹切削
☆
2、辅助功能指令:
M指令
功 能
程序格式及说明
M
辅助功能
用于进行开关操作,一个程序段最多可以有5个M功能。
M0
程序停止
用M0停止程序执行;按“启动”键加工继续执行。
LCYC95内孔固定循环编程例题: LJ2.MPF (主程序) N10 G90 G54 G94 N20 T6D1(内孔车刀) N30 M03 S500 N40 G00 X20 Z2 N50 _CNAME="AA1" R105=3.000 R106=0.100 R108=1.000 R109=7.000 R110=1.000 R111=100.000 R112=50.000 LCYC95 N60 G00 X20 Z2 N70 S1000 F80 N80 AA1 N90 G00 Z100 N100 X100 N110 T1D1 N120 S400 N130 G00 X52 Z2
西门子数控机床操作及编程
SIEMENS SINUMERIK 802S SINUMERIK 802C
第一节 SIEMENS系统功能简介 第二节 内、外圆加工固定循环 第三节 螺纹加工及其固定循环 第四节 子程序 第五节 参数编程与坐标系变换编程 第六节 SIEMENS系统及其车床的操作 思考与练习
G53 ﹡
9
取消零点偏置
G53;
G500
8
取消零点偏置
G500;
G54~G59★
零点偏置
G54;或G55;等
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
西门子系统,在机床没有回零点时,也可以循环起动的方法。
在启动状态下(诊断—机床设定)输入DB126 DBX4.0,B,1西门子系统,等分圆周孔,钻孔循环的另一种方法,MACLL CYCLE81(100,0,5,,20)HOLES 1 或2(0,0,126,90,360/7,7)MACLL1,是直线2,是圆周0,起始角度0,起始点Z值126,半径90,第一孔的起始角度360/7,在360度内钻7个孔7,一共要钻7个孔西门子系统按键说明:区域转换键菜单扩展键返回键加工显示键自动方式单段运行手动方式;门子系统操作面板,英—汉对照说明:JOG 手动方式窗口:PresetScratch 对刀Handwheel 手轮ICN ICN…………………Gfct+transf G功能Auxiliary func 功能表Spindles 主轴功能Axis federate 轴功能表Zoom act .val 坐标值放大Act.val MCS 机床坐标系/绝对坐标系;<<<<<<<<<<<<<<<<<<<<<<<<<<<AUTO自动方式窗口:Over-storeDRF offsetProgram control 程序控制Block searchHandwheel 手轮Correct programProgram overview…………………Gfct+transf G功能Auxiliary func 功能表Spindles 主轴功能Axis federate 轴功能表Zoom act .val 坐标值放大Act.val MCS 机床坐标系/绝对坐标系;<<<<<<<<<<<<<<<<<<<<<<<<<<<MDA 方式窗口Program control 程序控制Handwheel 手轮Editor function 编辑MDA file fct MDA程序管理…………………Gfct+transf G功能Auxiliary func 功能表Spindles 主轴功能Axis federate 轴功能表Zoom act .val 坐标值放大Act.val MCS 机床坐标系/绝对坐标系Delete MDA buffer 删除MDA缓冲区;<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<< 按区域转换键后的窗口:Machine 机床Parameter 参数Program 程序Services 服务Diagnosis 诊断Startup 起动…………………AUTO 自动方式MDA MDA方式JOG 手动方式R.EPOSREF;<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<< 按Parameter参数选择键后的窗口:Magazine list 刀具补偿R parameter R参数Setting data 设定数据(维修时用)Zero offset 零点偏置User data 用户数据Actire ZO+compens 坐标激活Tool manageme 刀具管理…………………Axes+ 轴+Axes- 轴-Rotation scale mirr Base ZOSet ZO;<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<< 按Program程序选择键后的窗口:Work—pieces 工件Part programs 工件程序Sub—programs 子程序User cycles 用户循环Clip—board 剪粘板Log 记录…………………Interactiv programing 对话式编程New 新的Copy 复制Inserl 粘贴Delete 删除Rename 重命名AlterenableInteractiv programing 对话式编程New 新的Load 装载Unload 卸载Smulation 模拟Manage programs 程序管理Seleet 选择Save setup data 保存数据;<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<< 按Services服务选择键后的窗口:Data in 数据输入Data out 数据输出Manage data 数据管理Data selection 数据选择Interface 接口…………………V24 RS232C接口PG 编程器Disk 磁盘Archive… 文档NC card NC卡;<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<< 按Diagnosis诊断选择键后的窗口:Alarms 报警Messages 信息Alarm log 报警记录Serrice displays 服务显示Plc status LC状态…………………Display newStore logSort young—old;<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<按Program control程序控制,选择键后的窗口:• Skp:skip block跳过语句• Dry:dry run federate空运行• ROV:rap:trat o/ride 快速倍率• M01:program stop程序停止• DRF RF offset DRF偏差• RT: program test 程序测试SBL1: λ每一个机床切削后停止SBL2: 每一条语句后停止λSBL3: λ循环停止Display 显示Display all blocks 显示所有程序段λλ Display erav bloks anly 仅显示程序段移动;西门子系统打开两个程序窗口,可以相互复制程序段的操作步骤:新建一个文件或打开一个文件—→按“双页面键”—→打开第二个文件—→按“程序段选择键”,选中要复制的程序段—→按“复制程序段”键—→按NEXT/Window键,也就是把光标换到另一个文件下面—→按粘贴程序段键—→按“确定软键”。
;龙门”“镗””铣床上的程序段搜索的操作步骤:首先要在自动状态方式下—→按“程序段搜索软键”—→用上下光标键移动光标至所需要的程序段上—→按“计算轮廓软键”—→按程序自动运行键,启动程序。
;龙门“镗”铣床自动抓附件头的操作步骤:1#,直角附件头。
2#,加长附件头。
3#,万能附件头。
抓附件头的程序:ATT=1#或2#或3#M62放附件头的程序:ATT=0M62;复制某个程序名下的某一部分程序段至另一个程序名下的操作步骤:打开需要复制的程序—→按程序段选择键,选择要复制的程序段—→按“程序段复制软键”—→按“关闭编辑器软键”—→打开要复制到的程序,这里也可以自己新建一个程序名—→把光标移动到所要复制的地方—→按“粘贴程序段软键”—→按确定。
;在MDI方式下保存MDI里的程序的操作步骤:在MDI方式下—→按MDI功能键—→按“文件保存软键”—→按确定。
;在MDI方式下打开工件程序的步骤:在MDI方式下—→按MDI功能键盘—→选择要打开的程序—→按“文件写入软键”。
;程序从磁盘上复制到机床上的操作步骤:按机床扩展键—→按“服务软键”—→按“磁盘软键”—→按“复制软键”—→按“程序数据软键”(这里要选择把程序复帛到工件或工件程序里)—→按“粘贴软键”—→建立新的文件名—→确定。
(若选中的程序显示没有使能时,要把光标移动到这个程序名上后,按“改变批准”软键,然后在按“装载”软键)。
;TK6916A数控落地镗参数:M75附件拉刀M76附件放松M83主轴拉刀M84主轴松刀;西门子系统手工编制无条件程序跳跃。
GOTOB LABEL 或GOTOF LABELGOTOB向后跳跃(指向程序开头)GOTOF向前跳跃(指向程序结尾)LABEL跳跃目的(程序内标号)(程序段号);西门子系统手工编制有条件程序跳跃。
(循环分层铣削的格式):LABEL:IF expression GOTOB LABEL或IF expression GOTOF LABELIF 条件关键字GOTOB向后跳跃GOTOF向前跳跃LABEL跳跃目的格式:IF R1<=0~∞ GOTOB AA例:假定工件要“铣”10mm深,每一刀“铣” 1mm深格式一、R1=1 (下刀平面高度)Z=-R1 (Z轴下刀深度)R1=R1+1 (Z轴往复下刀深度)IF R1<=10 GOTOB AA (Z轴下刀总深度为10mm)格式二、R1=-1 (下刀平面高度)Z=R1 (Z轴下刀深度)R1=R1-1 (Z轴往复下刀深度)IF R1>=-10 GOTOB AA (Z轴下刀总深度为10mm)手工编制循环分层“铣削”时应特别注意,每次进刀深度必须要能整除切削总深度。