西门子840D数控系统调试.
840D操作调试指南

840D操作指南1.激活软驱起动PCU→当出现提示“Press <F2>to Enter setup时”按“F2”键(水平第2个软键,不包括“↑”)→用上下方向键选择disktte A→按“→” 键(方向键右键) →用上下方向键找到“Floppy disk controller”选项→按“input”键,用上下方向键选择Enable→按“input”键。
→按“F10” 键(Menu select键)→按“→”(方向键右键)→选择YES→按“input”键。
2.中文安装1.起动PCU→当出现白色SINUMERIK时按“↓” 键→按“1” 键→按“input” 键→选择“1” →输入口令sunrise→按“input”键→选择“1” →按系统提示依次插入1~4号盘。
2.按“MENU SELECT”键→按“start up”键→按“MMC”键→按“Lange selset” 键→将第二语言选成中文→OK。
3.3.安装完HMI后出现IP地址报警的处理方法1.起动PCU当出现SINUMRIK时按“↓”键→按“input”键。
2.按系统提示选择“4”(Start windows)→按系统提示选择“1”(Standardwindows)。
C.输入口令“SUNRISE” →按“input”键近入windows。
D.用“TAB”键选中图标,用方向键选择图标。
用“TAB”键选择“Start”→按“input”键→用“↑”键选择“Settings” →按“input”键→选择“Control panel” →按“input”键→选择“Network” →按“input”键→用“TAB”键选择“Protocols” →按“input”键→选择“specify an IP address”→修改IP地址为192、168、0、30225、225、225、01、0、0、0→按“MENU”键关闭对话框→用“TAB”键选择“Start” 用“↓”键选择“shut pown” →选择重新起动计算机。
西门子840D数控系统调试培训讲学

西门子840D数控系统调试上电之前的准备一:将NCK主板卸下,检查NCK主板上的电池是否正确安装。
正确安装之后将NCK主板安装到NCU盒上。
二:外围线路的连接➢(1) 每根轴的动力线,编码器反馈线是否正确安装(X411-轴1编码器,X422轴2编码器,动力线插口X轴对应A1口,Z轴对应A2口,2-AXIS)➢(2) 设备总线,直流母线等是否正确可靠连接。
➢(3) 3相电源进线连接是否可靠,U,V,W是否对应。
➢(4) SIMATIC线的连接(IM361接OUT口,NCK接X111口)➢(5) MPI线的连接(两头ON中间OFF)➢(6) MCP面板的节地址开关设置(810D面板的节地址为14,机床控制面板后面的S3开关(1-8) 依次设为OFF OFF ON ON ON ON OFF OFF;840D面板的节地址为6,机床控制面板后面的S3开关从左到右依次设为ON OFF ON OFF ON ON OFF OFF)➢(7) 如果是PCU50,要将显示器后面的硬盘开关拨到ON的位置。
上电之后先安装HMI 软件。
软件拷贝到E盘三:上电➢(1) 上电之前请将数控系统的热控断开,MCP和OPI面板上的24V电源拔掉,以免由于接线错误造成器件烧坏。
➢(2) 上电之后检查供给数控系统的电压是否为380V,MCP和OPI面板的电源是否为直流24V,且正负极性正确。
➢(3) 如果2正确,断电,合上热控,MCP和OPI面板的直流电源插上,上电调试。
四:PLC,NC总清1、NC总清步骤:➢(1)将NC启动开关S3→“1”:➢(2)启动NC,如NC已启动,按复位按钮S1:➢(3)待NC启动成功,七段显示器显示“6”或者“b”,将S3→“0”;这时H1(左列)显示灯“+5V”显示绿灯,NC总清执行完成。
即:将S3置于1位置后,按下复位按钮S1,待七段码管显示“6”或者“b”后,将S3置于0位置。
NC总清后,SRAM内存中的内容被全部清掉,所有机器数据被预置为缺省值。
SINUMERIK-840D-系统调试

实验:SINUMERIK 840D 系统调试(X,Y,SP1)实验目的:1.掌握840D系统结构及硬件设备功能及硬件设备接口连接2.PLC和NC调试3.主轴调试4.回参考点及手轮配置5.840D优化及试运行4.报警编辑实验设备:➢硬件●PC(内置CP5512卡)、PROFIBUS-DP总线一根、●SINUMERIK 840D(PCU50.3 , 电源模块, NCU572.5单双轴驱动模块各一个)、●伺服电机3台(内置编码器);X-1FT6044 Endat cable 6FX5002-5EQY-1FT6044 Incre cable 6FX5002-2CASP-1PH6064 Incre➢软件—●HMI adv (PCU50.3)●STEP 7 V5.4 SP3●840D TOOLBOX-V6.5;实验步骤:1.硬件设备及连线1.1硬件设备外部设置1)电源模块(55KW)电源正常时只有yellow灯处于常亮状态。
2)NCU-572.5●48端子与9短接;●63,64端子<==>PLC的Q54.0; Q54.1连接[地址54在STEP7-Config中设置];NS1&NS2必须短接—本实验系统:63- Q54.064- Q54.1外部四个开关左上(red)—I54.1右上(red)—I54.3左下(green)—I54.2右下(green)—I54.4PLC 时序控制编程:3)611U1.2硬件设备连线1)PC & PCU & NCU2)611U与Motor611U的A1接口(底部后侧)和-X411接口连接电机1;A2 ……………………-X412……………….2.[注]:接反会有电机过温报警。
2.实验先前准备工作2.1安装STEP 7S7软件存在光盘上,并附带一张授权软盘。
S7软件可在WINDOWS环境下安装。
找到软件根目录,双击“SETUP.EXE”文件即可。
840Dsl数控系统模拟主轴的调试
附件
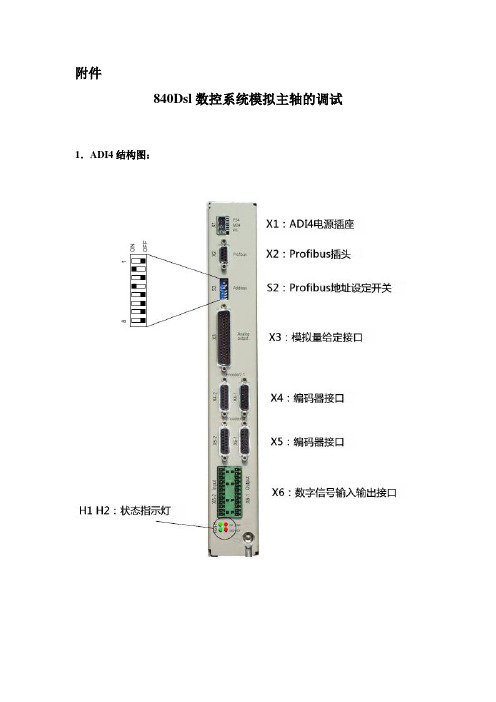
840Dsl数控系统模拟主轴的调试1.ADI4结构图:
1.1 DC24V电源插头X1
P24 +24V
M24 0V
PE 接地
1.2 Profibus插头X2
ADI4通Profibus总线与数控系统通讯,在802Dsl中,通过总线连接的还有I/O信号的PP板,因此在正常连接的时候除了要正规标准的制作Profibus总线插头外,还要注意插头的ON/OFF的位置,避免拨错位置,导致无法通讯。
1.3 Profibus地址设定开关S2
地址分配采用的是BCD码
若总线地址是17:将1、5开关置位。
如下图:
1.4 模拟量输出X3
1.5 数字输入信号接口X6-2
1.6 在STEP7的“hardware”中挂站编译并保存
1.7 参数设置
因为ADI4可以配置4个轴,根据机床的实际情况将13050的轴号与ADI4匹配,在“hardware”中将ADI4中的数值改成参数[13050]的“4340—4460”。
MD13060=3
MD13070=80FH
MD13080=4
重新上电,调试结束。
840D调试参数调整
840D调试参数调整840D调试参数调整一、轴配置MD10000 AXCONF_MACHAX_NAME_TAB 机床级轴配置MD20070 AXCONF_MACHAX_USED 通道级轴配置驱动号MD20080 AXCONF_CHANAX_NAME_TAB 通道级轴配置编程名MD20060 AXCONF_GEOAX_NAME_TAB 使用的几何轴名MD20050 AXCONF_GEOAX_ASSIGN_TAB 激活使用的几何轴驱动号二、驱动配置S tart_up/machine data首先配置功率模块,配置完成后SAVE OK 此时做一个NCK复位;再配置电机,配置完成后保存Boot File / Save BootFile / Save All 此时再做一次NCK 复位。
三、轴参数设置1、轴数据设定MD 30130 CTRLOUT_TYPE 给定值类型1为给定输出0为模拟MD 30240 ENC_TYPE 编码器类型实际为1MD 30110 CTRLOUT_MODULE_NR 给定值分配到逻辑驱动号MD 30200 NUM_ENCS 1为一个测量系统2为两个测量系统MD 30220 ENC_MODULE_NR 实际值分配到逻辑驱动号MD 30230 ENC_INPUT_NR 实际值输入到驱动模块(上部位1 下部为2)MD 32110 ENC_FEEDBACK_POL 实际值极性0/1为默认值-1变极性MD 32100 AX_MOTION_DIR 运动方向0/1为默认值-1变方向2、轴测量数据MD 31000 ENC_IS_LINEAR 测量系统是线性的0为旋转式的1为MD 31040 ENC_IS_DIRECT 0编码器在电机上1编码器在机床上MD 31020 ENC_IS_RESOL 编码器每转线数MD 31030 LEADSCREW_PITCH 丝杠螺距MD 31060 / MD31050 =电机转数/丝杠转数MD 31080 / MD31070 =电机转数/编码器转数3、轴测量监控和软限位MD 36210 CTRLOUT_LIMITMD 36200 AX_VELO_LIMITMD 32000 MAX_AX_VELO 最大速度和G00速度MD 32010 JOG_VELO_RAPIDMD 32020 JOG_VELOMD 36100 POS_LIMIT_MINUS 第一软限位负MD 36110 POS_LIMIT_PLUS 第一软限位正MD 32450 BACKLASH 背隙补偿4、轴回参考点参数MD 34110 REFP_CYCLE_NR 通道特定的回参考点0 本机床不能由通道回参考点-1 本通道可不必回参考点MD 34200 ENC_REFP_MODE 参考点模式0 绝对值编码器1 带零脉冲的增量编码器3 带距离编码的长度测量尺5 接近开关取代撞块MD34000 REFP_CAM_IS_ACTIVE 0 无参考撞块(零脉冲) 1 有参考撞块MD 11300 JOG_INC_MODE_LEVELTRIGGRD 0 连续回参考点1电动回参考点 MD 34050 REFP_SEARCH_MARKER_REVERSE0 同步脉冲在挡块之前1 同步脉冲在挡块之后。
840D数控系统调试
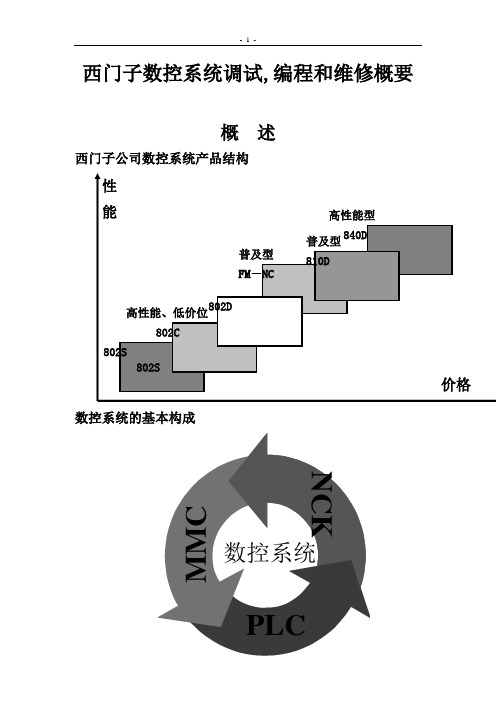
西门子数控系统调试,编程和维修概要概 述西门子公司数控系统产品结构数控系统的基本构成NCKM M CPLC数控系统第一讲西门子数控系统的基本构成一.西门子840D系统的组成SINUMERIK840D是由数控及驱动单元(CCU或NCU),MMC,PLC模块三部分组成,由于在集成系统时,总是将SIMODRIVE611D驱动和数控单元(CCU或NCU)并排放在一起,并用设备总线互相连接,因此在说明时将二者划归一处。
人机界面人机交换界面负责NC数据的输入和显示,它由MMC和OP组成MMC(Man Machine Communication)包括:OP(Operation panel)单元,MMC,MCP(Machine Control Panel)三部分。
MMC实际上就是一台计算机,有自己独立的CPU,还可以带硬盘,带软驱;OP单元正是这台计算机的显示器,而西门子MMC的控制软件也在这台计算机中。
1.MMC我们最常用的MMC有两种:MMCC100.2和MMC103,其中MMC100.2的CPU为486,不能带硬盘;而MMC103的CPU为奔腾,可以带硬盘,一般的,用户为SINUMERIK810D配MMC100.2,而为SINUMERIK840D配MMC103.※PCU(PC UNIT)是专门为配合西门子最新的操作面板OP10、OP10S、OP10C、OP12、OP15等而开发的MMC模块,目前有三种PCU模块——PCU20、PCU50、PCU70, PCU20对应于MMC100.2,不带硬盘,但可以带软驱;PCU50、PCU70对应于MMC103,可以带硬盘,与MMC不同的是:PCU50的软件是基于WINDOWS NT的。
PCU的软件被称作HMI,HMI有分为两种:嵌入式HMI和高级HMI。
一般标准供货时,PCU20装载的是嵌入式 HMI,而PCU50和PCU70则装载高级HMI.2.OPOP单元一般包括一个10.4〞TFT显示屏和一个NC键盘。
840D操作调试指南

840D操作调试指南840D操作指南1.激活软驱起动PCU→当出现提示“Press to Enter setup时”按“F2”键(水平第2个软键,不包括“↑”)→用上下方向键选择disktte A→按“→” 键(方向键右键) →用上下方向键找到“Floppy disk controller”选项→按“input”键,用上下方向键选择Enable→按“input”键。
→按“F10” 键(Menu select键)→按“→”(方向键右键)→选择YES→按“input”键。
2.中文安装1.起动PCU→当出现白色SINUMERIK时按“↓” 键→按“1” 键→按“input” 键→选择“1” →输入口令sunrise→按“input”键→选择“1” →按系统提示依次插入1~4号盘。
2.按“MENU SELECT”键→按“start up”键→按“MMC”键→按“Lange selset” 键→将第二语言选成中文→OK。
3.3.安装完HMI后出现IP地址报警的处理方法1.起动PCU当出现SINUMRIK时按“↓”键→按“input”键。
2.按系统提示选择“4”(Start windows)→按系统提示选择“1”(Standardwindows)。
C.输入口令“SUNRISE” →按“input”键近入windows。
D.用“TAB”键选中图标,用方向键选择图标。
用“TAB”键选择“Start”→按“input”键→用“↑”键选择“Settings” →按“input”键→选择“Control panel” →按“input”键→选择“Network”→按“input”键→用“TAB”键选择“Protocols” →按“input”键→选择“specify an IP address”→修改IP地址为192、168、0、30225、225、225、01、0、0、0→按“MENU”键关闭对话框→用“TAB”键选择“Start” 用“↓”键选择“shut pown” →选择重新起动计算机。
西门子840D调试知识
机床调试步骤:1.到现场先验货。
2.标记各轴电缆。
3.更换电机及编码器4.检查电柜外观及重要的接线,如动力回路,24V等坐标系FRAME CHAIN最终的坐标是由上向下一级级叠加1.MCS(Machine Coordinate System):由机床物理轴构成的坐标系。
2.BCS(Basic Coordinate System):由3个垂直轴和其他指定轴组成。
如果没有运动变换,BCS=MCS;如果有运动变换,几何轴和机床轴名称一定要不一样3.additive offset,是轴方向的平移偏置,没有旋转镜像缩放功能。
由PLC激活db3x.dbx3.0上升沿(自动模式下生效),PLC激活后,在下一个motion block 执行完后,偏置生效。
Md28082可以配置Chanel spesific system frame;编程$AA_ETRANS[axis]=xx。
DRF偏置;superimposed movement只能用同步功能通过$AA_OFF[axis]实现。
重新上电后,最后一次生效的additive offset不生效,除非用PLC重新激活,可以在MD24008修改。
MD24006 bit1=1复位后external zero offset还生效。
执行SUPA是不受zero offset external影响。
4.BZS(Basic Zero system),BZS is the basic coordinate system with basicoffset.BZS=BCS+zero offset external或DRF或superimposed motion 或Chained system frames或Chained basic frame。
5.SZS(Settable Zero system) is the workpieace coordinate system with aprogrammable frame from the viewpoint of the WCS.The workpiece zero is defined by the settable frame G54 to G599.SZS=WCS(由G54-G599定义)+programmable frame。
840D调试简明步骤(DYS)

840D调试简明步骤(DYS)Sinumerik 840D 简明调试步骤⼀般840D系统的调试都是按照下列步骤来进⾏的:⼀、确认系统信息1、NC卡的版本2、NCU版本3、确认与之兼容的HMI软件版本(如果是PCU20,可以忽略该软件版本),toolbox版本⼆、安装系统软件开机(PCU50),直接进⼊windows系统,将HMI软件(例如HMI ADV V6.4.28)拷⾄D盘,直接安装,等待完成,重启,即可进⼊HMI标准界⾯。
三、电⽓检查按照电⽓图纸,仔细检查硬件接线,特别注意下⾯⼏个⽅⾯:1、各个电⽓部件的供电电压是否对应2、伺服电机的动⼒线的U/V/W是否与插座⼀⼀对应3、如果有抱闸的,注意其供电电压,⼀般西门⼦标准为24V,其中⿊⾊电缆为正,⽩⾊电缆为负。
4、如果同时配备滤波器和电抗器,注意接线顺序:先滤波器,再进电抗器,最后接⼊电源模块,同时注意模块的进出线顺序。
四、通电检查⽤万⽤表仔细检查下线路是否供电正常。
五、NC/PLC调试对于新到的系统,必须进⾏NC/PLC总清,步骤如下:NC 总清操作步骤如下:(1)将NC 启动开关 S3 ⾄“1”;(2)启动NC,如NC 已启动,可按⼀下复位按钮S1;(3)待NC 启动成功,七段显⽰器显⽰“6”,将S3 ⾄“0”;NC 总清执⾏完成。
NC 总清后,SRAM 内存中的内容被全部清掉,所有机器数据(Machine Data)被预置为缺省值。
PLC 总清操作步骤如下:(1)将PLC 启动开关S4 “2”;=> PS 灯会亮。
(2)S4 “3”并保持约3 秒直等到PS 灯再次亮;=> PS 灯灭了⼜再亮。
(3)在3 秒之内,快速地执⾏下述操作S4:“2” “3” “2”;=> PS 灯先闪,后⼜亮,PF 灯亮。
(有时PF 灯不亮)(4)等PS 和PF 灯亮了,S4 “0”; => PS 和PF 灯灭,⽽PR 灯亮。
PLC 总清执⾏完成。
840D第三手轮调试
840D第三手轮调试德国西门子公司Sinumerik 840D数控系统一块NCU板X121最多可以连接两个手轮,但如果是大型机床多处控制需要连接第三个手轮,这种用法是西门子840D数控系统的一个特接口连接第三手轮。
殊应用。
即用2-AXIS FDD MOU-DLE X412(MOTOR ENCODER AXIS2)1.840D NC 参数下与手轮有关通用、通道、轴数据MD 11340 $MN_ENC_HANDWHEEL_SECMENT_NR=1 HARDWARC SEGMENT SIMODRIVE 611D(默认不显示的参数)MD 11342 $MN_ENC_HANDWHEEL_MODULE_NR=4AC-CORDINGLY MD13010 ;DRIVE_LOGIC_NR (第三手轮所在的驱动器号)MD11344 $MN_ENC_HANDWHEEL_INPUT_NR=2 ;LOWER ENCODER INTENFACEL ;UPPER ENCODER INTERFACE [驱动器上面的口 1 还是驱动器下面的口2]MD 11350 $MN_HANDWHEEL_SEGMENT[2]=1 HARDWARE SEGMET SINUNERIK 840D (840Dm 默认值)MD 11351 $MN_HANDWHEEL_MODULE[2]=1 HANDWARE MODULE SINUNERIK 840D(840D默认值)MD11352 $MN_handwheel_input[2]=3 3.handwheel 840d(默认值)第三手轮所接的驱动器模块测量系统不要激活,即不上DB3X.DBX1.5和DB3X.DBX1.6,如果激活的话会出现硬件报警和测量系统报警。
如:300613、300505、300614、25000、25201、300504等。
第三手轮所在的驱动器号逻辑编号必须激活(是),相应的轴数据也都设置。
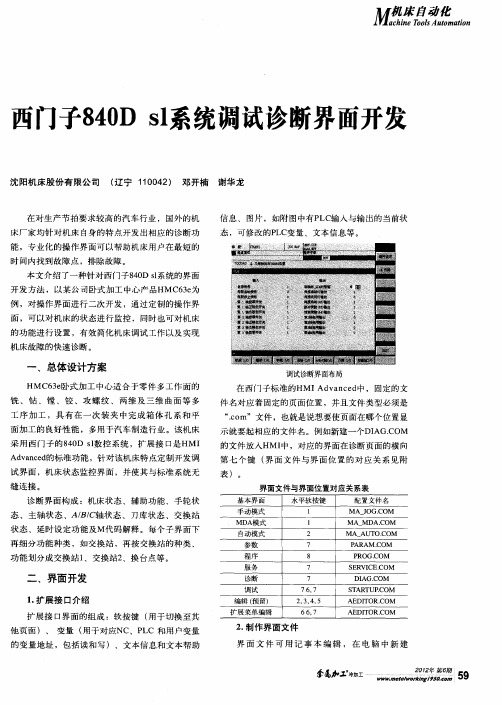
西门子840D sl系统调试诊断界面开发
//ND
(2)主页面内容配置 当按下 “SMTCL”按 键后 ,系统进入主页面 ,即 “Forml”界面 ,在主 界面中可定义变量 ,显示文本文件 ,并定义进入子 界面 的 软 按键 ,基本 语 句 如下 :
//M(Forml/”机床 I/O”); 【Forml ̄,须与起始页面的LM (Form1)对应 ]
件名对应着固定的页面位置 ,并且文件类型必须是
“ .corn”文 件 ,也 就 是说 想 要使 页 面在 哪 个 位 置显
示就 要 起 相应 的文 件 名 。例 如新 建 一 个DIAG.COM
的文件放入HMI中,对应的界面在诊断页面的横 向
第七 个键 (界面 文件 与界面位 置的对应关 系见附
信 息 、 图片 ,如附 图 中有PLC输 入与 输 出 的 当前 状 态 ,可修改的PLC变量、文本信息等 。
一 总体设计方案 、
HM C63e[ ̄式 加 工 中 心适 合于 零 件 多工 作 面 的 铣 、钻 、镗 、铰 、攻 螺纹 、两 维及 三维 曲面 等多 工 序加工 ,具有 在一次 装夹 中完成箱 体孔 系和平 面 加 工 的 良好 性 能 , 多用 于 汽车 制 造 行 业 。该 机 床 采用西 门子的840D sl数控系统 ,扩展接 口是HMI Advanced的标准功能 ,针对该机床特 点定制开发调 试界面 ,机床状态监控界面 ,并使其与标 准系统无 缝 连 接 。
C: Single character B: Bool V :Variant
限制变量最小值与最大值或者切换标志 :
/[1imit va lues or toggle f ield or table identif ier]
表 )。
【精品】西门子840D的安装与调试

西门子840D的安装与调试西门子840D的安装与调试摘要数控技术是现代装备制造业的基础,关系到国家战略地位和体现一个国家综合科技水平,也是国家中长期科技计划十六个重大专项中的关键技术。
具有高速高精度控制、五轴联动插补、多通道控制和车铣复合技术的高档数控系统更是上升到战略物资的高度,成为发达国家限制中国进口的产品,在国内还没有相应的产品。
对高档数控系统的功能进行完整的规划,并研究其各种功能的工艺方法和计算机软件的规划成为开发高档数控系统的重要工作。
本文选用了最具代表性的三轴数控铣床作为典型案例,选用了西门子840D机床本体,按照数控机床装调过程构建一台真实可加工的小型数控铣床,将数控机床装调的核心知识和技能穿插其中,按照实践、归纳、推理和再实践的模式完成数控机床装调维修工的教学和实训。
按照数控机床装调概述、进给传动子系统装调、主传动子系统装调、刀辅传动子系统装调和整机装调的顺序循序渐进,能够完整而清晰地亲历整个数控机床的装配和调试过程,并在构建每个装配和调试步骤所涉及的技巧进行了总结。
关键词:西门子840d 安装与调试技巧【Abstract】CNC technology is the basis for modern equipment manufacturing related to the status of national strategies and reflect a country's overall technological level, the national long-term projects Sixteen major projects in the key technologies. High-speed precision control, five-axis interpolation, multi-channel control and high-grade milling CNC composite technology is of strategic materials to rise to the height of the developed countries to limit Chinese imports in the country has not the appropriate product. On the high-end full function numerical control system ofplanning and study its various features methods and computer software technology planning as an important development of high-grade digital systems work. This selection of the most representative of the three-axis CNC milling machine as a typical case, the choice of the Siemens 840D machine body, in accordance with the process of CNC machine tool alignment can process build a real small CNC milling machine, CNC machine tool alignment of the core knowledge and skills interludes which, in accordance with the practice, and induction, reasoning and re-practice model CNC machine tools complete the alignment of teaching and training maintenance workers. Alignment in accordance with an overview of CNC machine tools, the feed drive subsystem alignment, alignment of the main drive subsystem, knife mounted auxiliary transmission subsystem in order to reconcile the progressive alignment machine, complete and clear to experience the whole assembly and commissioning of CNC machine tools process and in building and commissioning of each step involved in the assembly techniques are summarized.Keywords:Siemens 840d installation and debugging skill摘要 (1)1、引言……………………………………………………2、西门子840D装配内容及注意事项…………………………2.1 装配内容…………………………………………………2.2 装配原则…………………………………………………3、西门子840D装配工艺规程的设计步骤……………………3.1 产品分析……………………………………………………3.2 步骤设计…………………………………………………4、数控及驱动单元……………………………………………4.1 840D与NCU …………………………………………………4.2 驱动模块…………………………………………………5、OP单元和PCU…………………………………………………5.1 OP单元和MPI………………………………………………5.2 PCU …………………………………………………………5.3 MCP …………………………………………………………5.4 PLC模块…………………………………………………5.5 硬件连接…………………………………………………5.6 接地………………………………………………………6、数控系统的通电调试………………………………………6.1 开机和启动………………………………………………6.2 NC和PLC总清……………………………………………6.3 PLC 调试…………………………………………………6.4 NC 调试…………………………………………………6.5 数据备份…………………………………………………7、设计总结……………………………………………………8、结束语…………………………………………………………9,致谢………………………………………………………10、参考文献…………………………………………………1引言数控机床是现代制造技术的基础装备,随着数控机床的广泛应用与普及,机床的验收工作越来越受到重视,但很多用户对数控机床的验收还存在着偏差.西门子840D检验的主要目的是为了判别机床是否符台其技术指标, 判别机床能否按照预定的目标精密地加工零件.在许多时候,西门子840D验收都是通过加工一个有代表性的典型零件决定机床能否通过验收.当该机床是用于专门加工某一种零件时,这种验收方法是可以接受的.但是对于更具有通用性的数控机床,这种切削零件的检验方法显然得不能提供足够信息来精确地判断机床的整体精度指标. 只有通过对机床的几何精度和位置精度进行检验,才能反映出机床本身的制造精度.在这两项精度检验合格的基础上, 然后再进行零件加工检验, 以此来考核机床的加工性能. 对于安置在生产线上的西门子840D, 还需通过对工序能力和生产节拍的考核来评判机床的工作能力.但是,在实际检验工作中,往往有很多的用户在西门子840D验收时都忽视了对机床精度的检验,他们以为西门子840D在出厂时已做过检验,在使用现场安装只需调一下机床的水平,只要试加工零件经检验合格就认为机床通过验收.这些用户往往忽视了以下几方面的问题: 1,西门子840D通过运输环节到达现场,由于运输过程中产生的振动和变形,其水平基准与出厂检验时的状态已完全两样, 此时机床的几何精度与其在出厂检验时的精度产生偏差. 2,即使不计运输环节的影响,机床水平的调整也会对相关的几何精度项目产生影响. 3,由于位置精度的检测元件如编码器,光栅等是直接安装在机床的丝杠和床身上,几何精度的调整会对其产生一定的影响. 4,由检验所得到的位置精度偏差,还可直接通过数控机床的误差补偿软件及时进行调整,从而改善机床的位置精度. 5,气压,温度,湿度等外部条件发生改变,也会对位置精度产生影响. 6,由检验所得到的位置精度偏差,还可直接通过数控机床的误差补偿软件及时进行调整,从而改善机床的位置精度. 检验西门子840D床时仅采用考核试加工零件精度的方法来判别机床的整体质量, 并以此作为验收的唯一标准是远远不够的,必须对机床的几何精度,位置精度及工作精度作全面的检验,只有这样才能保证机床的工作性能,否则就会影响设备的安装和使用,造成较大的经济损失. 在数控机床到达用户方,完成初次的调试验收工作后,也并不意味着调试工作的彻底结束.在实际的生产企业中,常常采用这样的设备管理方法:安装调试完成后,设备投入生产加工中,只有等到设备加工精度达不到最初的要求时,才停工进行相应的调试.这样很多企业无法接受这样的停工的损失,所以在日常的工作中也可以按照"六自由度测量的快速机床误差评估"方法解决这个问题, 大量减少测试时间,这样小车间也可以提前控制加工过程,最终通向零故障以及更少对事后检查的依赖. 六自由度测量的快速机床误差评估方法是测量系统一次安装调试后, 可同时测量六个数控机床精度项目的误差值,与传统的单一精度项目测量方法相比,可大大缩短仪器的装调,检测时间下面将介绍数控机床的安装与调试的过程.2西门子840D装配内容及注意事项2.1装配内容清洗为了保证产品的装配质量和延长产品的使用寿命,特别是对于像轴承,密封件,精密偶件以及有特殊清洗要求的零件,装配前要进行清洗。
第四章西门子840D与810D数控系统安装与调试
1)进给轴使用绝对编码器控制位置; 2) 绝对值编码器已校正 (M034210=2)。
二、增量式回参考点 4、绝对式回参考点
7)监控用机床数据 监控用机床数据主要包 括定位数据、软限位、速度监控、轮廓监控 等数据,见表 4-13 所示。
五、机床设定数据
机床设定数据可以根据实际的机床情况进行 调整。对机床数据的修改可以通过零件程序 的方法进行,也可以通过机床操作面板上的 参数调整区进行。通常需要调整的机床数据 如表所示。
re:复位(RESET),按控制单元上的“RESET” 键使数据生效;
so:立即(IMMEDIATELY),值输入以后立即生效。
三、数据生效方式
图4-2 隐藏文件设置的选择显示屏幕
四、机床数据分类
4.2数控系统常用机床数据
一、操作面板用机床数据
操作面板用机床数据主要用来设置屏幕的显 示方式;刀具参数的写/读保护等级;R参数 的保护等级;用户变量的写/读保护等级; 零件程序与循环程序的保护等级;其他数据 的保护等级等,如表4-4所示。
否则数控机床通电后,由于坐标轴的当前位置已经超过 了参考点挡块,数控系统在执行回参考点操作时,找不 到参考点挡块而直接碰到硬限位挡块,假如硬限位挡块 的长度不够,坐标轴就有可能冲过硬限位挡块,损坏机 床的机械部件。
二、增量式回参考点 1、有挡块回参考点
二、增量式回参考点 2、无挡块回参考点
如果把 MD34000 设置为 0,则回参考点方式将是不 带参考点挡块,这时的同步脉冲信号是编码器的零脉冲 或接近开关信号 BERO。
西门子840D数控系统hhu调试

840D sl/840D/840Di/810D
Basic Machine
Function Manual
The communications system integrated in the NC permits a maximum of 2 machine control
panels and one handheld unit to exchange data with the 810D and the 840D. An SDB 210 is
not required to transfer the signals of these components. The information given below is
parameter values must be assigned according to the handheld unit settings. However, the
parameter names on the handheld unit are the reverse of the parameter names in the basic
address or GD parameter set of this unit to that of the new component.
3. In this PLC cycle, communication with the new component can now be activated again by
be linked to the OPI or the MPI is determined by parameters MCPMPI and BHGMPI.
840D操作调试指南

840D操作调试指南对于使用数控机床的操作人员来说,熟练掌握机床的调试和操作是至关重要的。
本篇文章将为大家提供一份840D操作调试指南,帮助大家了解和掌握该系统的操作要点。
一、操作前准备在开始操作和调试之前,有几项准备工作是必不可少的。
1.1 检查设备首先,仔细检查数控机床的各个部位是否正常运转,包括电源、液压系统、气压系统等。
确保设备处于良好的工作状态,以免因设备故障导致操作失败。
1.2 备份数据在进行调试和操作之前,务必要备份好数控机床上的重要数据,以防操作出现问题导致数据丢失。
可以通过将数据复制到外部存储设备或者建立云端备份来保证数据的安全。
二、操作步骤2.1 开机和登录按下数控机床的启动按钮,待系统启动完成后,会弹出登录界面。
根据个人操作权限,输入用户名和密码登录系统。
2.2 系统主界面登录成功后,系统将显示主界面。
主界面通常包含各类功能按钮,如自动加工、手动操作、参数设置等。
根据具体操作需求,选择相应的功能按钮进入相应的界面。
2.3 自动加工在自动加工界面中,可以进行程序输入、程序编辑、刀具管理等操作。
根据加工工艺要求,输入相应的加工程序,并进行调试和优化。
2.4 手动操作手动操作界面提供了对机床各轴的手动控制功能。
可以通过选择相应的轴,进行手动移动、连续移动、定位、回零等操作。
在手动操作过程中,需特别注意安全,防止误操作造成人员伤害或设备损坏。
2.5 参数设置通过参数设置界面,可以对数控系统的参数进行调整和配置。
根据具体需求,可以设置工作坐标系、刀具补偿、速度比例、进给参数等。
合理的参数设置可以提高加工质量和效率。
三、常见问题及解决方法3.1 系统错误在操作和调试过程中,可能会遇到系统错误的情况。
当出现错误提示时,首先要冷静,并根据提示信息进行排查,如确认电源是否正常、程序是否正确等。
若无法解决,及时联系维修人员协助处理。
3.2 加工问题在加工过程中,可能会出现刀具磨损、加工误差、加工质量不佳等问题。
840D调试步骤及部分注意点

调试步骤及说明:1.将PCU硬盘旋钮旋至OPERATING位置,激活硬盘。
2.如系统未装HMI界面,通过USB将HMI界面安装软件传入系统,并安装. 3.进入HMI界面后,进入菜单-调试—--HMI---选择中文。
4.如驱动启动后,NCU状态灯显示为3(或者无法总清,有可能PC卡中未写入软件), PC卡为空卡,通过CardWare写入软件(电脑必须标配PC卡插槽,否则软件无法使用),然后安装对应版本的工具盘(PLC库文件)。
5.插入PC卡后,进行NCK和PLC总清,最上面两个绿灯亮后,总清完成。
6.接下来可以通过适配器将电脑连接NCU进行PLC编辑调试了.7.参数14504、14506、14508(分别对应14510、14512、14514的个数)可先设好以备PLC使用。
8.PLC初步调试后,开始配置驱动器,进入菜单—调试——-驱动配置—--选择功率模块(主轴为ARM,进给轴为SRM)。
激活轴参数30130和30200、30240、38000(螺距补偿最大点数,此参数一定要先设好,如果后设此参数的话,内存要重新分配,驱动数据和加工程序等会丢失)后NCK重启即可配置驱动数据,进入菜单—调试——-驱动数据-——电机控制器-——电机选择…9.各个轴动作后,如配的是西门子的迷你手轮,手轮摇时,界面轴+-交替变换,脉冲不正常时,可将手轮盒内前四个短接片断开试试(参见DoconCD)。
VB27000012可监控手轮脉冲。
10.轴自动优化,在调试---最佳化测试---自动控制设置,不带PLC,监控:激活,上限:200,下限:-200,上限和下限的数值在绝对位置两边,设置方式:速度控制器:标准设置,Z轴优化时抱闸要打开11.如何进入Windows 界面,开机后当画面出现840D POWERLINE右下角有V08—06—00-02这样的版本号时,马上按数字3,选择DESKTOP在对话框内输入NAME:AUDUSER、PASSWORD: SUNRISE 切换到OK 12.报警文本:系统F:\dh\mb。
西门子840D数控系统调试.
上电之前的准备一:将NCK主板卸下,检查NCK主板上的电池是否正确安装。
正确安装之后将NCK主板安装到NCU盒上。
二:外围线路的连接(1 每根轴的动力线,编码器反馈线是否正确安装(X411-轴1编码器,X422轴2编码器,动力线插口X轴对应A1口,Z 轴对应A2口,2-AXIS(2 设备总线,直流母线等是否正确可靠连接。
(3 3相电源进线连接是否可靠,U,V,W是否对应。
(4 SIMA TIC线的连接(IM361接OUT口,NCK接X111口(5 MPI线的连接(两头ON中间OFF(6 MCP面板的节地址开关设置(810D面板的节地址为14,机床控制面板后面的S3开关(1-8 依次设为OFF OFF ON ON ON ON OFF OFF;840D面板的节地址为6,机床控制面板后面的S3开关从左到右依次设为ON OFF ON OFF ON ON OFF OFF(7 如果是PCU50,要将显示器后面的硬盘开关拨到ON的位置。
上电之后先安装HMI 软件。
软件拷贝到E盘三:上电(1 上电之前请将数控系统的热控断开,MCP和OPI面板上的24V电源拔掉,以免由于接线错误造成器件烧坏。
(2 上电之后检查供给数控系统的电压是否为380V,MCP和OPI面板的电源是否为直流24V,且正负极性正确。
(3 如果2正确,断电,合上热控,MCP和OPI面板的直流电源插上,上电调试。
四:PLC,NC总清1、NC总清步骤:(1将NC启动开关S3→“1”:(2启动NC,如NC已启动,按复位按钮S1:(3待NC启动成功,七段显示器显示“6”或者“b”,将S3→“0”;这时H1(左列显示灯“+5V”显示绿灯,NC总清执行完成。
即:将S3置于1位置后,按下复位按钮S1,待七段码管显示“6”或者“b”后,将S3置于0位置。
NC总清后,SRAM内存中的内容被全部清掉,所有机器数据被预置为缺省值。
2、PLC总清步骤:(1将PLC启动开关S4→“2”;=>PS灯会亮。
西门子840D数控系统调试
上电之前的准备一:将NCK主板卸下,检查NCK主板上的电池是否正确安装。
正确安装之后将NCK主板安装到NCU盒上。
二:外围线路的连接➢(1) 每根轴的动力线,编码器反馈线是否正确安装(X411-轴1编码器,X422轴2编码器,动力线插口X轴对应A1口,Z 轴对应A2口,2-AXIS)➢(2) 设备总线,直流母线等是否正确可靠连接。
➢(3) 3相电源进线连接是否可靠,U,V,W是否对应。
➢(4) SIMATIC线的连接(IM361接OUT口,NCK接X111口)➢(5) MPI线的连接(两头ON中间OFF)➢(6) MCP面板的节地址开关设置(810D面板的节地址为14,机床控制面板后面的S3开关(1-8) 依次设为OFF OFF ON ON ON ON OFF OFF;840D面板的节地址为6,机床控制面板后面的S3开关从左到右依次设为ON OFF ON OFF ON ON OFF OFF)➢(7) 如果是PCU50,要将显示器后面的硬盘开关拨到ON的位置。
上电之后先安装HMI 软件。
软件拷贝到E盘三:上电➢(1) 上电之前请将数控系统的热控断开,MCP和OPI面板上的24V电源拔掉,以免由于接线错误造成器件烧坏。
➢(2) 上电之后检查供给数控系统的电压是否为380V,MCP和OPI面板的电源是否为直流24V,且正负极性正确。
➢(3) 如果2正确,断电,合上热控,MCP和OPI面板的直流电源插上,上电调试。
四:PLC,NC总清1、NC总清步骤:➢(1)将NC启动开关S3→“1”:➢(2)启动NC,如NC已启动,按复位按钮S1:➢(3)待NC启动成功,七段显示器显示“6”或者“b”,将S3→“0”;这时H1(左列)显示灯“+5V”显示绿灯,NC总清执行完成。
即:将S3置于1位置后,按下复位按钮S1,待七段码管显示“6”或者“b”后,将S3置于0位置。
NC总清后,SRAM内存中的内容被全部清掉,所有机器数据被预置为缺省值。
SINUMERIK-840D-系统调试

实验:SINUMERIK 840D 系统调试(X,Y,SP1)实验目的:1.掌握840D系统结构及硬件设备功能及硬件设备接口连接2.PLC和NC调试3.主轴调试4.回参考点及手轮配置5.840D优化及试运行4.报警编辑实验设备:➢硬件●PC(内置CP5512卡)、PROFIBUS-DP总线一根、●SINUMERIK 840D(PCU50.3 , 电源模块, NCU572.5单双轴驱动模块各一个)、●伺服电机3台(内置编码器);X-1FT6044 Endat cable 6FX5002-5EQY-1FT6044 Incre cable 6FX5002-2CASP-1PH6064 Incre➢软件—●HMI adv (PCU50.3)●STEP 7 V5.4 SP3●840D TOOLBOX-V6.5;实验步骤:1.硬件设备及连线1.1硬件设备外部设置1)电源模块(55KW)电源正常时只有yellow灯处于常亮状态。
2)NCU-572.5●48端子与9短接;●63,64端子<==>PLC的Q54.0; Q54.1连接[地址54在STEP7-Config中设置];●NS1&NS2必须短接—本实验系统:63- Q54.064- Q54.1外部四个开关左上(red)—I54.1右上(red)—I54.3左下(green)—I54.2右下(green)—I54.4PLC 时序控制编程:3)611U1.2硬件设备连线1)PC & PCU & NCU2)611U与Motor611U的A1接口(底部后侧)和-X411接口连接电机1;A2 ……………………-X412……………….2.[注]:接反会有电机过温报警。
2.实验先前准备工作2.1安装STEP 7S7软件存在光盘上,并附带一张授权软盘。
S7软件可在WINDOWS环境下安装。
找到软件根目录,双击“SETUP.EXE”文件即可。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
上电之前的准备一:将NCK主板卸下,检查NCK主板上的电池是否正确安装。
正确安装之后将NCK主板安装到NCU盒上。
二:外围线路的连接(1 每根轴的动力线,编码器反馈线是否正确安装(X411-轴1编码器,X422轴2编码器,动力线插口X轴对应A1口,Z 轴对应A2口,2-AXIS(2 设备总线,直流母线等是否正确可靠连接。
(3 3相电源进线连接是否可靠,U,V,W是否对应。
(4 SIMA TIC线的连接(IM361接OUT口,NCK接X111口(5 MPI线的连接(两头ON中间OFF(6 MCP面板的节地址开关设置(810D面板的节地址为14,机床控制面板后面的S3开关(1-8 依次设为OFF OFF ON ON ON ON OFF OFF;840D面板的节地址为6,机床控制面板后面的S3开关从左到右依次设为ON OFF ON OFF ON ON OFF OFF(7 如果是PCU50,要将显示器后面的硬盘开关拨到ON的位置。
上电之后先安装HMI 软件。
软件拷贝到E盘三:上电(1 上电之前请将数控系统的热控断开,MCP和OPI面板上的24V电源拔掉,以免由于接线错误造成器件烧坏。
(2 上电之后检查供给数控系统的电压是否为380V,MCP和OPI面板的电源是否为直流24V,且正负极性正确。
(3 如果2正确,断电,合上热控,MCP和OPI面板的直流电源插上,上电调试。
四:PLC,NC总清1、NC总清步骤:(1将NC启动开关S3→“1”:(2启动NC,如NC已启动,按复位按钮S1:(3待NC启动成功,七段显示器显示“6”或者“b”,将S3→“0”;这时H1(左列显示灯“+5V”显示绿灯,NC总清执行完成。
即:将S3置于1位置后,按下复位按钮S1,待七段码管显示“6”或者“b”后,将S3置于0位置。
NC总清后,SRAM内存中的内容被全部清掉,所有机器数据被预置为缺省值。
2、PLC总清步骤:(1将PLC启动开关S4→“2”;=>PS灯会亮。
(2S4→“3”并保持等到PS灯再次亮=>PS灯灭了又再亮。
(3在3秒之内,快速地执行下述操作S4:“2”→“3”→“2”:=>PS灯先闪,后又亮,PS灯亮。
(有时PS灯不亮(4等PS和PF灯亮了,S4→“0”:=>PS和PF灯灭,而PR灯亮。
即:将S4按钮“2→3→2→3→2→0”;或者打开任意一个PLC 程序,通过PLC→Clear/Rest 来实现。
PLC总清后,PLC程序可通过STEP7软件下传至系统。
如PLC总清后屏幕上有报警可作一次NCK复位(热启动。
五:配轴1、设置密码[Startup] →[Password…]→[Set Password] →[SUNRISE] →[OK]2、R参数扩展✧MD28050:通道R专用参数。
通常扩展为900✧MD 18120 Number of global user variable GUD data 10->20 ✧MD 22200 Output time of M functions0= Output before motion1 = Output during motion YES✧MD 222300 Output time of H functions0 = Output before motion1 = Output during motion YES✧MD 10350 Number of active digital NCK input bytes 01->5✧MD 10360 Number of active digital NCK output bytes 01->5 ✧MD 18120 Number of global user variable GUD data 10->20 ✧MD 19100 =5✧MD 19200 =2✧MD 19270 =2 2->64KB✧MD 32084 Effect of VDI signals on handwheel travel ->FFH=>3FH✧MD 10720 Setting of mode after power ON7->6 6 = JOG modeMD 10300 Number of analog NCK-InputsMD 10320 Standardization (adaption to measured quantity.e.g.: Analogmodule +/- 10V = 32767Stroke of measuring test key 15mm = 10VMD10320 = 30 (i.e. max stroke = 30mmMD 10362 Hardware referencee.g.: 01 0F 03 011st Byte = 01 = with 840 in any case2nd Byte = 0F = Modul number (Drive number3rd Byte = 03 = Plug in location on Module4th Byte = 01 = Low-Byte No. of I/O-Bytes on DMP-Module ✧3、垂度斜度补偿(双向螺补MD19300=04H HASH table size for subdirectories MD18342[0]=10第一轴正向补偿点数MD18342[1]=10第一轴负向补偿点数MD18342[2]=10第二轴正向补偿点数MD18342[3]=10第二轴负向补偿点数与补偿有关的参数双向补偿MD20150[20]=2 Initial setting of G groupsMD 31030 丝杆螺距MD 36920 Lead screw pitchMD 1320 Spindle pitchMD32450 反向间隙MD 31060 Numerator load gearboxMD36922 Numerator of gearbox encoder/loadMD1322 Numerator of gear unit encoder / loadMD32710 =1 Enable of sag compensationSD41300 =1 Compensation table enable单向补偿MD38000 Number of intermediate points for interpol. compensation (SRAM 插补补偿点数MD32700 Encoder/spindle error compensation. 插补补偿生效补偿文件的生成:服务→输出→数据→垂度/斜度4、配轴✓MD10000:机床坐标轴名✓MD20000:通道名称✓MD20050:指定几何轴到通道轴✓MD20060:通道中几何轴名✓MD20070:通道中有效的机床轴号✓MD20080:通道中的通道轴名称以七轴双通道设置为例说明(第三主轴为公共轴MD19100 $ON_NUM_AXES_ IN_SYSTEM = 3;系统中最大轴数(实际轴数+1 MD19110 $ON_NUM_ IPO_AXES = 3 ;联动轴数=实际轴数MD19200 $ON_NUM_CHANNELS = 2;系统中通道数MD19220 $ON_NUM_MODE_GROUPS = 1;系统中方式组数MD10000 Machine axis name [ 0 ] = " X1" ;系统中的轴名称MD10000 Machine axis name [ 1 ] = "Z2"MD10000 Machine axis name [ 2 ] = " X2"MD10000 Machine axis name [ 3 ] = " Z2"MD10000 Machine axis name [ 4 ] = " A1"MD10000 Machine axis name [ 5 ] = " A2"MD10000 Machine axis name [ 6 ] = " A3"MD10010 Channel valid in mode group[ 0 ] = 1 ;通道指定到方式组MD10010 Channel valid in mode group[ 1 ] = 1CHANDATA (1 ;通道1数据MD20050 Assignment of geometry axis to channel axis [ 0 ] = 1 ;通道中几何轴的轴号MD20050 Assignment of geometry axis to channel axis [ 1 ] = 0 MD20050 Assignment of geometry axis to channel axis [ 2 ] = 2 MD20060 Geometry axis name in channel [ 0 ] = " X" ;通道中几何轴的名称MD20060 Geometry axis name in channel [ 1 ] = " Y"MD20060 Geometry axis name in channel [ 2 ] = " Z"MD20070 Machine axis number valid in channel[ 0 ] = 1 ;系统分配通道1的轴号MD20070 Machine axis number valid in channel[ 1 ] = 2MD20070 Machine axis number valid in channel[ 2 ] = 5MD20070 Machine axis number valid in channel[ 3 ] = 7MD20080 Channel axis name in channel [ 0 ] = " X" ;通道中轴的名称MD20080 Channel axis name in channel [ 1 ] = " Z"MD20080 Channel axis name in channel [ 2 ] = " A"MD20080 Channel axis name in channel [ 3 ] = " SP" CHANDATA (2 ;通道2数据MD20050 Assignment of geometry axis to channel axis [ 0 ] = 1 ;通道中几何轴的轴号MD20050 Assignment of geometry axis to channel axis [ 1 ] = 0 MD20050 Assignment of geometry axis to channel axis [ 2 ] = 3 MD20060 Geometry axis name in channel [ 0 ] = " X" ;通道中几何轴的名称MD20060 Geometry axis name in channel [ 1 ] = " Y"MD20060 Geometry axis name in channel [ 2 ] = " Z"MD20070 Machine axis number valid in channel[ 0 ] = 3 ;系统分配通道2的轴号MD20070 Machine axis number valid in channel[ 1 ] = 4MD20070 Machine axis number valid in channel[ 2 ] = 6MD20070 Machine axis number valid in channel[ 3 ] = 7MD20080 Channel axis name in channel [ 0 ] = " X" ;通道中轴的名称MD20080 Channel axis name in channel [ 1 ] = " Z"MD20080 Channel axis name in channel [ 2 ] = " A"MD20080 Channel axis name in channel [ 3 ] = " SP"硬件配置:A1、A2、X1、Z1、、X2、Z2、A3驱动配置:位置1 2 3 4 5 6 7驱动5 6 1 2 3 4 7PLC 的处理CALL FC 19BAGNo :=B#16#1 ←操作面板控制方式组一ChanNo :=B#16#1 ←操作面板控制通道一SpindleIFNo:=B#16#3 ←主轴信号传送到轴三,即第三轴为主轴FeedHold :=M1.0 ←当面板上按FeedStop键后此位输出1 SpindleHold:=M1.1 ←当面板上按SpindleStop键后此位输出1 5、斜轴功能MD19410=8 (位3=1 选件位:MD 24100: Definition of transformation 1 in channel=1024 MD 24110: AXIS ASSIGNMENT FOR THE 1ST TRANSFORMATION IN THE[0]=1 斜轴轴号MD 24110: AXIS ASSIGNMENT FOR THE 1ST TRANSFORMATION INTHE[1]=2MD 24120: ASSIGNMENT OF GEOMETRY AXES TO CHANNEL AXESFOR[0]=1MD 24120: ASSIGNMENT OF GEOMETRY AXES TO CHANNEL AXESFOR[1]=0MD 24120: ASSIGNMENT OF GEOMETRY AXES TO CHANNEL AXESFOR[2]=2MD 24700: ANGLE BETWEEN CARTESIAN AXIS AND REAL (INCLINED=30 斜轴角度激活/取消斜轴功能:编程: 激活: TRAANG(30 取消: TRAFOOF参数:MD20140: Transformation data block selected during run up =1 6、直径编程MD 20100 Geometry axis with transverse axis function =XMD 20150 Initial setting of G groups[28]=27、偏置设置MD 20110 Definition of basic control settings after reset=4081/4001MD 20112 Definition of basic control settings at NC Start=400MD9422 Select PRESET/Basic offset in JOG=400SD42440 Traversing from zero offset with incr.programming=08、软限位1、第一软限位PLC 处理SET= DB3*.DBX2.0参数设置MD19310=06HMD36100 1st software limit switch minus MCS MD36110 1st software limit switch plus MCS2、第二软限位PLC 处理DB3*.DBX12.2 第二软限位负DB3*.DBX12.3 第二软限位正参数设置MD36120 2st software limit switch minus MCS MD36130 2st software limit switch plus MCS9、位置开关MD10450Assignment of software cams to machine axes MD41500 Trigger points at falling cam 1-8 软限位挡块负值(对应DB10.DBX110.*MD41501 Trigger points at falling cam 1-8软限位挡块正值(对应DB10.DBX114.*10、编码器回零1、回零相关参数MD11300INC and REF in jog mode 0、点动 1、保持 MD20700NC start disable without reference point 0、不需要回零就可执行NC程序1、需要回零MD30240 Encoder type of actual value sensing 1、增量4、绝对MD34000 Axis with reference point cam 0、无撞块1、有撞块MD34010 Approach reference point in minus direction 0、按“+”回零1、按“-”回零MD34210Adjustment status of absolute encoder 设为1 回零后自动变为22、绝对编码器回零MD30240 编码器类型[0] =4绝对编码器MD34210 [0] =1MD34200 Referencing mode [0]=03、增量编码器回零MD30240 编码器类型[0] =1增量编码器MD34210 [0] =1MD34000 [0]=1有撞块MD34020=Reference point approach velocity 回参考点速率(找撞块的速度 20MD34030= Maximum distance to reference cam找撞块的安全距离视机床行程而定MD34040= Creep velocity 爬行速率 2MD34050=Direction reversal to reference cam反向到参考点(找零脉的时机,0下降沿,1上升沿MD34060=maximum distance to reference mark找零脉的安全距离最好10~20mmMD34070=Reference point positioning velocity返回参考点定位速度 60MD34080=Reference point distance参考点位移 0.02MD34090=Reference point offset/absolute offset参考点偏移绝对位移编码器偏移11、主轴功能MD20090主主轴的选择MD30300旋转轴/主轴=1MD30310旋转轴/主轴的模数转换=1MD30320旋转轴和主轴的系数360度显示=1 MD30550公共轴被默认分配到哪个通道=1 MD31050负载变速箱分母MD31060负载变速箱分子MD32000最大轴速度MD32010点动模式下的快速移动MD32020点动轴速率MD32300轴加速度MD35000指定主轴到机床轴MD35040主轴复位=1遇到M02/M17/不停止 MD35100最大轴速度MD35110齿轮换档的最大速度MD35130齿轮级的最大速度MD35140齿轮档的最大速度MD35200速度模式下的加速度MD35210位置模式下的加速度MD36200速率监控门槛MD36210最大速度设定值SD43220最大速度设定值SD43200手动状态的速度/2为1 MD30350 Bit5=1主轴旋转M1=3(4 S1=NM2=3(4 S2=N12、主轴同步1、参数MD19310=06HMD19320=400MD19330=20MD19340=FMD19500=12、NC程序头尾架主轴同步SPOS[1]=ACP[0]SPOS[2]=ACP[0]COUPDEF(S2,S1,1,1,”N0”,”DV” SPCON[1] SPCON[2]SPCON(S2,S1,0 ;0相位角SOPS=ACP(0M17头尾架主轴准停COUPDEF(S2,S1,1,1,”N0”,”DV”SPCON[1]SPCON[2]COUPON(S2,S1,0SPOS=ACP(0M1713、中心架MD 3700=1 通道程序激活MD37010=* % 力矩值MD37020= 监控窗口MD37040 内部编码器FXS[X]=1 X轴名1,生效FXST[X]=力矩13、温度补偿常用到的参数●参数设置SD 43900:位置无关温度补偿值K0SD 43910: 位置相关温度补偿系数tantβSD 43920: 位置相关温度补偿参考位置P0MD 32750:→0 不需要进行温度补偿MD 32750→1 位置无关温度补偿设定SD 43900MD 32750→2 位置相关温度补偿设定SD43910 SD 43920MD 32750→3 位置无关和位置相关温度补偿同时生效设定SD 43900 SD43910 SD 43920PLC 需进行以下处理 SET = DB31.DBX60.4 = DB31.DBX60.5 位置误差与温度对应关系的建立一点在坐标轴上选取 P0 作为参考位置,当温度变化时测量出该位置的偏差 K0,此值称做位置无关温度补偿值。