最优控制理论研究及其MATLAB实现答辩稿
控制理论实验报告MATLAB仿真实验.doc
控制理论实验报告MATLAB仿真实验实验报告课程名称:控制理论(二)讲师:林峰结果:_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _实验名称:MATLAB仿真实验类型:_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _同一组学生的姓名:________一、实验的目的和要求(要求)二.实验内容和原则(要求)三.主要仪器和设备(必需)四.操作方法和实验步骤五、实验数据的记录和处理六.实验结果和分析(必需)7.控制系统时域分析实验9的探讨与体会首先,实验的目的:1.利用计算机辅助分析,掌握系统的时域分析方法。
2.熟悉Simulink仿真环境。
二、实验原理和方法:系统仿真本质上是系统模型的求解。
对于控制系统,一般模型可以转化为微分方程或差分方程。
因此,在仿真过程中,通过一些数值算法从初始状态开始逐步计算系统响应。
最后,画出系统的响应曲线,分析系统性能。
控制系统最常用的时域分析方法是当输入信号为单位阶跃和单位脉冲函数时,获得系统的输出响应,分别称为单位阶跃响应和单位脉冲响应。
在MATLAB中,提供了单位阶跃响应函数step、单位冲激响应函数impulse、零输入响应函数initial等来获得连续系统。
二、实验内容:二阶系统的状态方程模型是——控制理论(二)指导者:林峰结果:_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _实验名称:MATLAB仿真实验类型:_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _同一组学生的姓名:________一、实验的目的和要求(要求)二.实验内容和原则(要求)三.主要仪器和设备(必需)四.操作方法和实验步骤五、实验数据的记录和处理六.实验结果和分析(必需)7.控制系统时域分析实验9的探讨与体会首先,实验的目的:1.利用计算机辅助分析,掌握系统的时域分析方法。
2.熟悉Simulink仿真环境。
LQR系统最优控制器设计的MATLAB实现及应用
LQR系统最优控制器设计的MATLAB实现及应⽤LQR 系统最优控制器设计的MATLAB 实现及应⽤LQR( linear quadratic regulator) 即线性⼆次型调节器, 其对象是现代控制理论中以状态空间形式给出的线性系统, ⽽⽬标函数为对象状态和控制输⼊的⼆次型函数。
LQR 最优设计指设计是出的状态反馈控制器K要使⼆次型⽬标函数J 取最⼩值, ⽽K由权矩阵Q 与R 唯⼀决定, 故此Q、R 的选择尤为重要。
LQR理论是现代控制理论中发展最早也最为成熟的⼀种状态空间设计法。
特别可贵的是, LQR可得到状态线性反馈的最优控制规律, 易于构成闭环最优控制。
⽽且Matlab 的应⽤为LQR 理论仿真提供了条件,更为我们实现稳、准、快的控制⽬标提供了⽅便。
⼀、LQR 最优控制器系统设计的Matlab 实现1.1 LQR 最优控制器的系统设计假设线性系统状态空间描述为:x = Ax+ Bu,v= Cx 。
其中x 为n*1状态向量, u为m*1输⼊向量。
不失⼀般性考虑⼀个⼆次型⽬标函数:(1)式( 1) 中, Q 、R 称为加权矩阵, 且Q 为n*n 维正半定阵, R 为m*m 维正定阵。
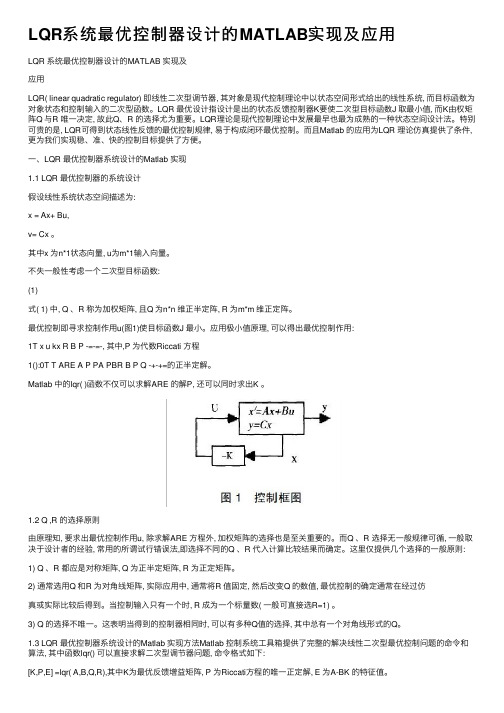
最优控制即寻求控制作⽤u(图1)使⽬标函数J 最⼩。
应⽤极⼩值原理, 可以得出最优控制作⽤:1T x u kx R B P -=-=-, 其中,P 为代数Riccati ⽅程1():0T T ARE A P PA PBR B P Q -+-+=的正半定解。
Matlab 中的lqr( )函数不仅可以求解ARE 的解P, 还可以同时求出K 。
1.2 Q ,R 的选择原则由原理知, 要求出最优控制作⽤u, 除求解ARE ⽅程外, 加权矩阵的选择也是⾄关重要的。
⽽Q 、R 选择⽆⼀般规律可循, ⼀般取决于设计者的经验, 常⽤的所谓试⾏错误法,即选择不同的Q 、R 代⼊计算⽐较结果⽽确定。
这⾥仅提供⼏个选择的⼀般原则:1) Q 、R 都应是对称矩阵, Q 为正半定矩阵, R 为正定矩阵。
基于Matlab软件的理论力学答辩

系统演示
圆锥陀螺相关物理量随时间的变化图
四、结论
• 本文结合理论力学中刚体绕瞬心的转动、弹簧摆 运动、圆锥陀螺运动等方面的典型例题,讲述如 何通过Matlab 软件实现理论力学教学的可视化问 题,通过以上的讨论可以发现:在理论力学教学 中结合MATLAB软件,一方面增加了教学的多样性 ,为理论力学的教学质量的提高提供保障。另一 方面,可以将抽象的力学问题具体化,使学生对 物理问题有直观的认识,加深对物理问题的理解 ,从而提高学习的效率。
致谢
• 在我论文的选题、开题到成文全过程遇到了无数 的困难和障碍,都是在我的导师李秀燕教授的悉 心指导下,还有不厌其烦的对我的论文进行修改 和改进下度过的,特此感谢,同时也非常感谢物 理与电子信息工程学院的全体任课教师给予我的 支持和帮助。尤其感谢我的同学和朋友,为我的 论文提供很多素材,还在论文的撰写以及排版给 予我很多帮助。在此向各位帮助和指导我的老师 与朋友表示最衷心的感谢!
知识回顾 Knowledge Review
1.理论力学的发展史
• 力学是较早发展起来的学科之一。远古时代由于农业上 的需要,人们开始制造和使用一些简单的生产工具。因此人 们对机械运动,早就有了一些认识和了解。随着生产的发展, 人们对机械运动的认识逐步加深。到了十六到十七世纪,伽 里略根据实验,提出了惯性定律的内容和加速度的概念,从 而奠定了动力学的基础。在这个基础上,经过笛卡儿、惠更 斯等的努力,后来由牛顿总其大成,于一六八七年在他的名 著《自然哲学的数学原理》中,完备地提出了动力学的三个 基本定律,并从这些定律出发将动力学作了系统的叙述。从 而使力学开始形成一门独立的系统的学科。十八、十九世纪 随着虚位移原理、达朗伯原理以及著名的拉格朗日方程的提 出,经动力学普遍方程为基础的分析力学发展起来了。至此, 理论力学也随之发展成熟。
基于MATLAB的直接转矩控制系统的仿真研究答辩稿
9/19/2014
谢谢
4. 分析圆形磁链轨迹DTC,并建模和仿真。
二. 异步电机数学模型
无论异步电机是 绕线式还是鼠笼 式,都将它等效 成绕线转子,按 照折算前后的转 子每相匝数都相 等的原则折算到 定子测。
异步电机物理模型
1.电压方程
uA Rs uB Rs uC = Rs Rs u a ub Rs Rs uc
五、六边形磁链直接转矩控制系统结构
六边形磁链控制系统结构图 19
六、圆形磁链直接转矩控制系统
在六边形磁链轨迹直接转矩控制中,每1/6控制周期磁链开关一次, 导致低速时转矩脉动大。减小转矩脉动,是使磁链轨迹接近圆形的 方法。一种有效的方法是通过合理选择非零电压空间矢量和零电压 空间矢量的顺序和其给出时刻,将定子磁链的幅值变化限制在一定 的容差范围内,进而获得旋转的圆形磁链轨迹。
iA iB iC ia ib ic
LAA、LBB、LCC、Laa、Lbb、Lcc 是各相绕组的自感,其余为互感。
3.转矩方程
Te pisT Msr ir PMsr (iAia iBib iCic)sin (iAib iBic iCia ) sin( 120) (iAic iBia iCib) sin( 120)
三相坐标系下和两相坐标系下的数学模型
四、直接转矩控制的基本原理
T 由运动系统的运动方程式得, 其中 Te 为电磁 Te 为系统惯性常数。若改变 转矩, GD 为负载转矩, 的 大小,则可以改变加速度的大小,从而改变速度的大小。 由此可知,调速系统究其根本是控制转矩。
L
2
最优控制理论研究及其MATLAB实现
本科毕业设计论文题目最优控制理论研究及其MATLAB实现专业名称学生姓名指导教师毕业时间毕业任务书一、题目最优控制理论研究及其MATLAB实现二、指导思想和目的要求随着计算机技术的飞速发展,控制系统的计算机辅助设计与分析得到了广泛的应用,目前已达到了相当高的水平。
MATLAB是国际控制界应用最广泛的计算机辅助设计与分析工具,它集矩阵运算、数值分析、信号处理和图形显示于一体,构成了一个方便的、良好的用户环境,其强大的科学计算与可视化功能,简单易用的开放式可编程环境,使得MATLAB在控制领域的各个方面都得到了广泛应用。
线性二次型最优控制可以使系统的某些性能达到最优,在工程上用得较为广泛,也是现代控制理论课程学习的重点和难点。
所谓最优控制,就是根据建立在系统数学模型,选择一个容许的控制规律,在一定的条件下,使得控制系统在完成所要求的控制任务时使给定的某一性能指标达到最优值、极小值或极大值。
图形用户界面GUI(Graphical User Interface)作为用户与软件交互的一种主要手段,已经成为现代软件的重要组成部分。
目前大部分软件的功能主要是通过图形用户界面调用,在软件产品的测试过程中,尤其是功能测试过程中,GUI功能测试占有非常大的比例,GUI测试是现代软件测试的关键环节。
GUI系统质量是整个软件产品质量提升和成本降低的关键。
由于GUI软件的独特性,使得原有传统软件的测试方法不大适用于GUI软件的测试,现有关于GUI测试的研究相对较少,资源也相对贫乏,并且GUI手工测试已经无法满足测试要求,因而对GUI测试自动化进行研究具有重要的现实意义。
本课题的研究内容主要包括以下几个方面:1、介绍线性二次型最优控制以及MATLAB下图形界面GUI的研究背景、意义和发展概况;2、研究最优控制的基本概念,性能指标以及求解方法;3、研究连续系统线性二次型最优控制的MATLAB实现过程;4、研究离散系统线性二次型最优控制的MATLAB实现过程。
电气专业毕业答辩
电气专业毕业答辩
尊敬的评委、老师们:
大家好,我是电气专业的毕业生XX,我很荣幸能够参加今天的毕业答辩。
在四年的学习生涯中,我深刻体会到电气专业的广阔和挑战。
电气专业涉及的领域非
常广泛,从高压输电到低压控制系统,从电力系统到自动化控制等等都是电气工程的重要
领域。
因此我在这四年中积极学习各门课程,努力拓宽自己的知识面,提高自己的综合素质。
在学生期间,我积极参与实验室和课程设计项目。
这些实践让我更好地理解和掌握电
气专业的理论知识,增强了我的动手能力和创新能力。
其中最令我难忘的是课程设计项目,我们小组合作完成了一项基于PLC的小型喷涂机自动化控制系统,这个项目的成功不仅增
强了我对电气专业的兴趣,而且也让我体验到了团队协作和实践创新的魅力。
在我的毕业设计中,我选择了研究与设计基于智能算法的配电网电压控制策略。
我使
用MATLAB工具集对反演控制策略进行了仿真分析和性能评估。
结果表明,该方法能够有效地控制配电网的电压,确保电力质量,同时减少了能源消耗和成本。
这个研究项目不仅让
我进一步深入了解了电力系统,而且也使我对智能算法的应用和效果有了更深刻的认识。
在未来,我希望能够在电气工程领域继续深入研究和应用。
我计划申请研究生学位,
在深入学习一些前沿技术的同时,也能够为行业做出更大的贡献。
未来的路还很长,但我
相信只要我肯努力,就一定能够实现自己的理想。
最后,我想再次感谢评委和老师们的关注和支持。
谢谢大家!。
(完整版)matlab毕业设计论文
摘要本文概述了信号仿真系统的需求、总体结构、基本功能。
重点介绍了利用Matlab软件设计实现信号仿真系统的基本原理及功能,以及利用Matlab 软件提供的图形用户界面(Graphical User Interfaces ,GUI)设计具有人机交互、界面友好的用户界面。
本文采用Matlab 的图形用户界面设计功能, 开发出了各个实验界面。
在该实验软件中, 集成了信号处理中的多个实验, 应用效果良好。
本系统是一种演示型软件,用可视化的仿真工具,以图形和动态仿真的方式演示部分基本信号的传输波形和变换,使学习人员直观、感性地了解和掌握信号与系统的基本知识。
随着当代计算机技术的不断发展,计算机逐渐融入了社会生活的方方面面。
计算机的使用已经成为当代大学生不可或缺的基本技能。
信号与系统课程具有传统经典的基础内容,但也存在由于数字技术发展、计算技术渗入等的需求。
在教学过程中缺乏实际应用背景的理论学习是枯燥而艰难的。
为了解决理论与实际联系起来的难题国内外教育人士目光不约而同的投向一款优秀的计算机软件——MATLAB。
通过它可用计算机仿真,阐述信号与系统理论与应用相联系的内容,以此激发学习兴趣,变被动接受为主动探知,从而提升学习效果,培养主动思维、学以致用的思维习惯。
以MATLAB 为平台开发的信号与系统教学辅助软件可以充分利用其快速运算,文字、动态图形、声音及交互式人机界面等特点来进行信号的分析及仿真。
运用MATLAB 的数值分析及计算结果可视化、信号处理工具箱的强大功能将信号与系统课程中较难掌握和理解的重点理论和方法通过概念浏览动态演示及典型例题分析等方式,形象生动的展现出来,从而使学生对所学知识理解更加透彻。
同时运用教学软件中的数值计算工具箱,将学生从大量繁琐的手工数学运算中解放出来,将更多时间留给对基本概念和基本方法的思考。
关键词:关键词:信号与系统,matlab,应用分析ABSTRACTAs the modern computer technology development, computer gradually merged with the various aspects of social life. the use of the computer essential part of the basic skills of students. the signal and systems of traditional classic of course, but there is also due to a digital technology development, the technology in the demand. in the teaching process of the practical application of theoretical study is boring and difficult. Theory with practice in order to solve the problem of educational circles and looked into a simultaneous of computer software —— matlab. it can be used by computer simulations, signals with the system theory and application related to the content, it aroused interest in learning and became passive acceptance of the initiative and thereby elevate learning, training of active in the make full use of its rapid operation of graphic, text, dynamic and interactive voice man-machine interface to the characteristics of the analysis and emulation. To the platform of the development of matlab signal system of teaching and assistive software can make full use of its rapid operation of graphic, text, dynamic and interactive voice man-machine interface to the characteristics of theanalysis and emulation. KEY WORDS:signal and system,matlab,An analysis目录前言 (1)第 1 章绪论 (2)1.1论文写作背景 (2)1.2研究问题的提出 (3)1.3研究问题的解决方案 (4)第 2 章MATLAB 软件简介 (6)2.1MAILAB 简介及发展过程 (6)2.2MATLAB 入门 (7)2.3MATLAB 语言平台简单介绍 (9)第 3 章信号与系统简介 (11)3.1信号与系统发展过程 (11)3.2信号与系统课程特点及重点内容 (12)3.3信号与系统涉及内容 (13)第 4 章MATLAB 在信号与系统中的应用 (15)4.1MATLAB 中信号表示及可视化 (15)4.2MATLAB 在信号与系统分析中的应用 (17)4.2.1 MATLAB 在时域、频域、S 域、Z 域里的应用举例 (17)4.2.2MATLAB 在信号调制、滤波及求解中的应用 (24)第 5 章GUI 界面的创建与应用 (31)5.1结GUI 界面创建的基本知识 (31)5.2 GUI 界面在信号与系统中的应用 (33)5.3信号与系统实验平台设计 (36)结论 (47)参考文献 (48)致谢 (49)前言随着我国高等教育逐步的实现了大众化以及产业结构进一步调整,社会对人才的需要出现了层次化和多样化的变化,这反映到高等学校的定位与教学要求中,必然会带来教学内容上的差异化和教学方式上的多样化。
开题答辩(语音变速matlab实现)

中,由于各种干扰因素导致的测试条件与训练环境的不匹配,
系统的性能往往会收到极大的影响。因此提高语音变速系统 的性能就成为了语音变速技术真正走向实用化的关键课题。 50年代 1
基本致力于探索声 学—语音学的基本概 念
60年代 2
日本的实验室开始进 入语音变速领域,并 构建一些专用的硬件 用于语音变速系统
寒假期间
阅读参考文献、 查阅相关资料
8 —— 10周
前
1 —— 4周 毕业实习,毕业 设计资料收集、 课题调研,准备 开题报告
语音变速算法原 理及编程实现, 中期检查 程序修改,算法 调试,结果比较 分析,撰写毕业 论文
后
11——13周
14周
5 —— 7周
期
语音信号的参数 含义和基本读取、 播放方法,完成 开题答辩
至今
00年代
未完待 续
9020 年代
Starting Point
90年
语音变速研究的重点 转向自然语言的变速 处理,任务转移到航 空旅行信息的索取
00年
人机语音 交互成 为研 究 的焦点。 研究重 点包 括 即兴口语的变速和理解 , 自然口语 对话 , 以及 多 语种的语音同声翻译
至今
中小词汇量非特定人 语音变速系统变速精 度已经大于98%,对 特定人语音变速系统 的变速精度就更高
文件的读取,从 MP3 转换为.wav,及播放
Step 1
查找资料,找相关期刊 书籍,目前用的是宋知 用. 《MATLAB在语音信 号分析与合成中的应用》
Step 2
Step 1
对相关算法仍在继续 查阅资料
04.关键问题
the key to the question
1、如何对原始信号通过基因检测获得
同步电机模型的MATLAB仿真设计PPT答辩
2 研究内容
RESEARCH CONTENTS
系统总体分为电源、abc/dq转换器、电机内部模拟、控 制反馈四个主要部分,并为其设计了专用的模块,同时对其 中的一系列参数进行了配置。系统启动仿真后,在经历了一 开始的振荡后,各输出相对于输出时间的响应较稳定。
3 研 究 内 容 RESEARCH CONTENTS
3 研 究 内 容 RESEARCH CONTENTS
3 调试分析
DEBUG ANALYSIS
-11
x 10 8
Vds /v 6
4
2
0
-2
time /s
-4
0
1
2
3
4
5
6
7
8
9 10
4结 论
Conclusion
本次设计主要运用了MATLAB/Simulink模拟了同步电机的 起动运行情况,设计过程中的主要障碍在于电机数学模型的 推导得出,一旦得出数学模型,建模的工作就能较轻松的进 行。由于计算机仿真模拟必然是今后工业研究发展的主要手 段,因此本设计对今后的仿真工作有一定的参考。然而对于 同步电机而言,实际运用中的主要调速手段为变频控制,因 此有必要在今后的研究工作中加入变频器控制从而体现其实 用价值。
2 研 究 内 容 RESEARCH CONTENTS
本设计采用电力电子变频装置实现电压频率协调控制, 改变了同步电机历来的恒速运行不能调速的面貌,使它和异 步电机一样成为调速电机大家庭的一员。针对同步电机中具 有代表性的凸极机,在忽略了一部分对误差影响较小而使算 法复杂度大大增加的因素,对其内部电流、电压、磁通、磁 链及转矩的相互关系进行了一系列定量分析,建立了简化的 基于abc三相变量上的数学模型,并将其进行派克变换,转换 成易于计算机控制的d/q坐标下的模型。
毕业论文-线性二次型最优控制器的MATLAB实现
湖北文理学院物理与电子工程学院2014届本科毕业论文论文题目线性二次型最优控制器的matlab实现班级姓名学号指导教师(职称)线性二次型最优控制器的MATLAB实现摘要:本文从线性二次型最优控制器原理出发,对象是现代控制理论中用状态空间形式给出的线性系统,目标函数为状态和控制输入的二次型函数。
通过加权矩阵Q 和R的一些选择规则,利用MATLAB仿真分析参数Q和R的变化对最优控制系统的影响,然后对其最优控制矩阵进行求解。
分别介绍了连续系统线性二次型最优控制的MATLAB实现,离散系统相形二次型最优控制的MATLAB实现和最优观测器的MATLAB实现这三种研究方案,以不同的程序实现其功能。
关键词:MATLAB;线性二次型;最优控制;矩阵Applying MATLAB to the Design of the Linear QuadraticOptimal ControllerAbstract:In this paper, starting from the principle of the linear quadratic optimal controller, the object is given the linear system using the forms of state space in modern control theory , the objective function is the two type of function of state and control input. Through some selection rules of the weighting matrices Q and R, analysis of the changes of parameters Q and R influence on the optimal control system by using MATLAB simulation, and then to solve the optimal control matrix. Respectively introduces the continuous system linear quadratic optimal control MATLAB, Discrete system in quadratic optimal control MATLAB, The optimal observer MATLAB these three research programs. Realize its function in a different program.Key words:MATLAB; Linear quadratic; The optimal control;Matrix目录1引言 (1)1.1概述 (1)1.2课题研究的背景、意义及研究概况 (1)1.3本文研究的主要内容 (3)2最优控制的基本概念 (4)2.1最优控制基本思想 (4)2.2最优控制问题的求解方法 (5)2.3 Q、R的选择原则 (6)2.4加权矩阵的调整 (6)2.4.1廉价控制 (6)2.4.2昂贵控制 (7)2.5问题的阐述 (8)2.6问题的求解 (9)2.7利用仿真给定的控制系统 (9)3最连续系统最优控制的MATLAB实现 (12)3.1连续系统线性二次型最优控制 (12)3.2 连续系统线性二次型最优控制的MATLAB实现 (13)4离散系统线性二次型最优控制的MATLAB实现 (14)4.1 离散系统稳态线性二次型最优控制 (14)4.2 离散系统线性二次型最优控制的MATLAB实现 (15)5最优观测器的MATLAB实现 (16)5.1 连续时不变系统的Kalman滤波 (16)5.2 Kalman滤波的MATLAB实现 (17)4结论 (19)[参考文献] (20)致谢 (21)1引言1.1概述近年来,仿真技术得到广泛的应用与发展,在系统设计、目标与环境模拟、人员培训等方面取得了丰硕成果,随着计算机技术的快速发展,控制系统的计算机辅助设计与分析得到了广泛应用,目前已经达到了相当高的水平。
讲稿 matlab最优控制仿真
最优控制仿真-一级倒立摆
三、仿真实现
3、LQR控制,引入 参考输入 x=1;y=1; Q = [ x,0,0,0; 0,0,0, =1; 不满足性能指标要求
最优控制仿真-一级倒立摆
三、仿真实现
3、LQR控制, 参数2+参考输入 x=5000;y=100; Q = [ x,0,0,0; 0,0,0,0; 0,0,y,0; 0,0,0,0]; R =1;
最优控制仿真-matlab函数
3、dare ——解离散系统的代数Riccati方程 4、dlqr——离散系统线性二次型状态调节器 5、lqry——连续系统线性二次型输出调节器 6、lqrd——连续时间系统的离散状态调节器
最优控制仿真-一级倒立摆
M 小车质量 m 摆杆质量 b 小车摩擦系数 l 摆杆转动轴心到杆质 心的长度 I 转动惯量 F 加在小车上的力 x 小车位置 φ 摆杆与垂直向上方向 的夹角 θ 摆杆与垂直向下方向 的夹角
最优控制仿真-matlab函数
1、[X,L,G,rr]=care(A,B,Q,R,S,E)——解连续系统的代 数Riccati方程 X:Riccati方程的解
L:闭环状态方程的特征值 G: 最优反馈增益阵 rr:残留矩阵的Frobenius范数
2、[K,S,e]=lqr(A,B,Q,R,N)——连续系统线性二次型状 态调节器 K:最优反馈增益阵 S:Riccati方程的解 e:闭环系统特征值
2
0⎤ 0 ⎡ ⎤ 2 ⎡x⎤ ⎢ ⎥ ⎥ I + ml 0⎥ ⎢ & ⎥ ⎢ 2⎥ ⎢ x ⎥ + ⎢ I ( M + m) + Mml ⎥u ⎥ 0 ⎥ ⎢Φ ⎥ ⎢ 0 ⎥ ml ⎢&⎥ ⎢ ⎥ 0 ⎥ ⎣Φ ⎦ 2 ⎥ ⎢ I ( M + m) + Mml ⎥ ⎦ ⎣ ⎦
基于MATLAB的数字滤波器设计毕业答辩
二、论文主要工作
2.1
数字滤波器原理与结构
2.2
数字滤波器设计步骤
23.3
IIR 数字滤波器设计
24.4
FIR 数字滤波器设计
2.1 数字滤波器原理与结构
数字滤波器的原理是:输入输出均为离散的数字信号,借助 于一定的数值计算方法和数字器件对输入信号进行处理,改变
输入信号的频谱或波形,从而达到保留信号中的有用成分,去
%求解模拟滤波器频率响应
magH2=(abs(H)).^2; %取模值
函数 hold on
%保持当前
图形
plot(w,magH2)
%画二维线性
图
axis([0 2 0 1]);%控制坐标轴比
例和外观
图2-2 巴特沃斯低通滤波器的幅频特性(基于 MATLAB 实现)
模拟 -数字滤波器转换
脉冲响应不变法的设计原理是用数
2.3 IIR数字滤波器设计
模拟滤波器设计 模拟-数字滤波器转换 滤波器频带转换
模拟滤波器设计
%巴特沃斯模拟低通滤波器设计关键
程序代码
[z,p,k]=buttap(N);
%设计巴特沃斯低通滤波器
[b,a]=zp2tf(z,p,k); %零极
点增益模型转换为传递函数模型
[H,w]=freqs(b,a,n);
窗函数简介
本文主要介绍了矩形窗、三角形窗、汉宁窗、海明窗和布莱克 曼五种窗函数。各窗函数的基本参数如表2-1所示。
表2-1 各种窗函数的基本参数
窗函数
矩形窗 三角形窗 汉宁窗 海明窗 布莱克曼窗
第一旁瓣相对于主瓣 衰减 /dB -13 -25 -31
-41 -57
主瓣宽度
4π /N 8π /N 8π /N 8π /N 12π /N
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
具体研究方案
• 连续系统最优控制的MATLAB实现示例
x1 (t ) u(t ) x1 (0) 0 已知连续系统状态方程与初始条件为 , , 性能指标: x2 (t ) x1 (t ) x2 (0) 1
1 J = x22 (t ) u 2 (t ) dt, 设计I自动化测试工具普遍采用的是捕获 /回放机制,并没有对GUI测试的自动化提供很 好的支持。只能被动捕获被测试系统的执行信 息,而不能和被测试系统进行交互,有选择地 捕获被测系统的执行信息。因而,研究与设计 图形用户界面的自动化测试工具,对促进国内 GUI应用系统测试自动化具有较深远的意义。
最优控制理论研究及其MATLAB实现
专业:自动化 班级: 学号: 姓名: 导师:
论文框架及研究过程
•课题研究背景及意义 •课题研究基本思想 •各线性二次型最优控制的MATLAB分析 •论文总结
课题研究的背景及意义
最优控制理论是50年代中期在空间技术的 推动下开始形成和发展起来的。线性系统在 二次型性能指标下的最优控制问题则是R.E. 卡尔曼在60年代初提出和解决的。到目前为 止,二次型最优控制在理论上比较成熟,为 解决这类控制问题而开发的MATLAB函数也比 较多,而且这种控制应用非常广泛。
启动GUI工具箱 界面包含一个静 态文本框控件、 一个可编辑文本 框、一个按钮组 控件、三个按钮 控件、一个列表 框控件。
最优滤波器GUI基本界面
最优滤波器控制界面
滤波器的增益矩阵L
系统估计误差协方差
LQG最优控制的MATLAB实现
Guass最优控制基本界面 Guass最优控制运行界面
论文总结
设计回掉函数运行界面
离散系统最优控制的MATLAB实现示例
以知伺服系统动态结构状态方程为
x(k 1) ax(k ) bu (k ) u (k ) k1v(k ) k2 x(k ) v(k ) r (k ) y (k ) v(k 1) y (k ) cx(k )
离散系统反馈矩阵Kx
离散系统单位阶跃响应
最优观测器KALMAN的MATLAB实现示例
已知单位负反馈连续系统的受控对象与校正装置的传递函数分别为:
G0 s
18 s 1 1 G s , c s 10 s2
试设计一个 GUI 界面,实现如下要求: (1) 点击按钮“ Kalman 增益矩阵 L ”时,在列表框中显示系统 Kalman 滤波器 的增益矩阵 L ; (2) 点击“系统估计误差的协方差 P ”按钮时,列表框中显示系统估计误差的 协方差 P ; (3) 点击“ Kalman 最优滤波器”按钮时,列表框中显示系统 Kalman (最优) 滤波器(a,b,c,d)。
通过对最优控制理论及其MATLAB实现的设计,我 了解了最优控制是以现代控制理论中的状态空间理 论为最优控制算法,是当前振动控制中采用最为普 遍的控制器设计方法。它所能解决的主要对象是结 构参数模型比较准确、激励和测量信号。使控制系 统的性能指标实现最优化的基本条件和综合方法。 相对于经典控制而言,最优控制有它显著的优势, 应用最优理论设计的多输入—多输出与高阶系统, 往往能得到比经典控制设计的结果要满意得多。
式中 a=0.5, b=1, c=1, d=0 利用 GUI 工具箱设计一界面使其满足在点击【反馈矩阵 Kx】键时在输出框中输 出系统稳态最优反馈增益矩阵,在点击【Step response】键时在轴上画出相应的 系统闭环后的单位阶跃给定响应曲线。
• 离散系统线性二次型最优控制的MATLAB设计
离散系统GUI界面
的功能是:最优反馈增益矩阵 K、最优控制 u*(t)、最优性能指标 J*、特征方程 的特征值和 Riccati 方程的正定解 P。
• 连续系统线性二次型最优控制的MATLAB设计 • 打开MATLAB生成GUI界面 • 五个按钮的String属性设置为: 1、最优反馈增益矩阵K 2、Riccati方程的正定解P 3、最优控制u*(t) 4、最优性能指标J* 5、特征方程的特征值
谢谢各位老师的审阅和指导!